Robotics J501 キャリアボード ハードウェアと入門ガイド
Robotics J501 Mini キャリアは、高度なロボット向けに設計されたコンパクトで高性能なエッジAIキャリアボードです。MAXNモードでNVIDIA Jetson AGX Orinモジュール(32GB/64GB)に対応し、最大275 TOPSのAI性能を発揮します。デュアルGigabit Ethernetポート、5GおよびWi-Fi/BTモジュール用M.2スロット、2つのUSB 3.2ポート、CAN、GMSL2(オプションの拡張経由)、I2C、UARTなどの豊富な接続オプションを備え、各種センサーからの複雑なデータを処理できる強力なロボット用ブレインとして機能します。JetPack 6.2.1とLinux BSPをプリインストールしており、シームレスなデプロイを実現します。
NVIDIA Isaac ROS、Hugging Face、PyTorch、ROS 2/1 などのフレームワークをサポートする Robotics J501 Mini は、大規模言語モデルによる意思決定と、モーションプランニングやセンサーフュージョンといった物理ロボット制御との橋渡しを行います。自律ロボットの迅速な開発に最適で、すぐに使えるインターフェースと最適化されたAIフレームワークにより、製品化までの時間を短縮します。

reComputer Jetson Robotics J501-Mini キャリアボード概要
| 上面図 |
|---|
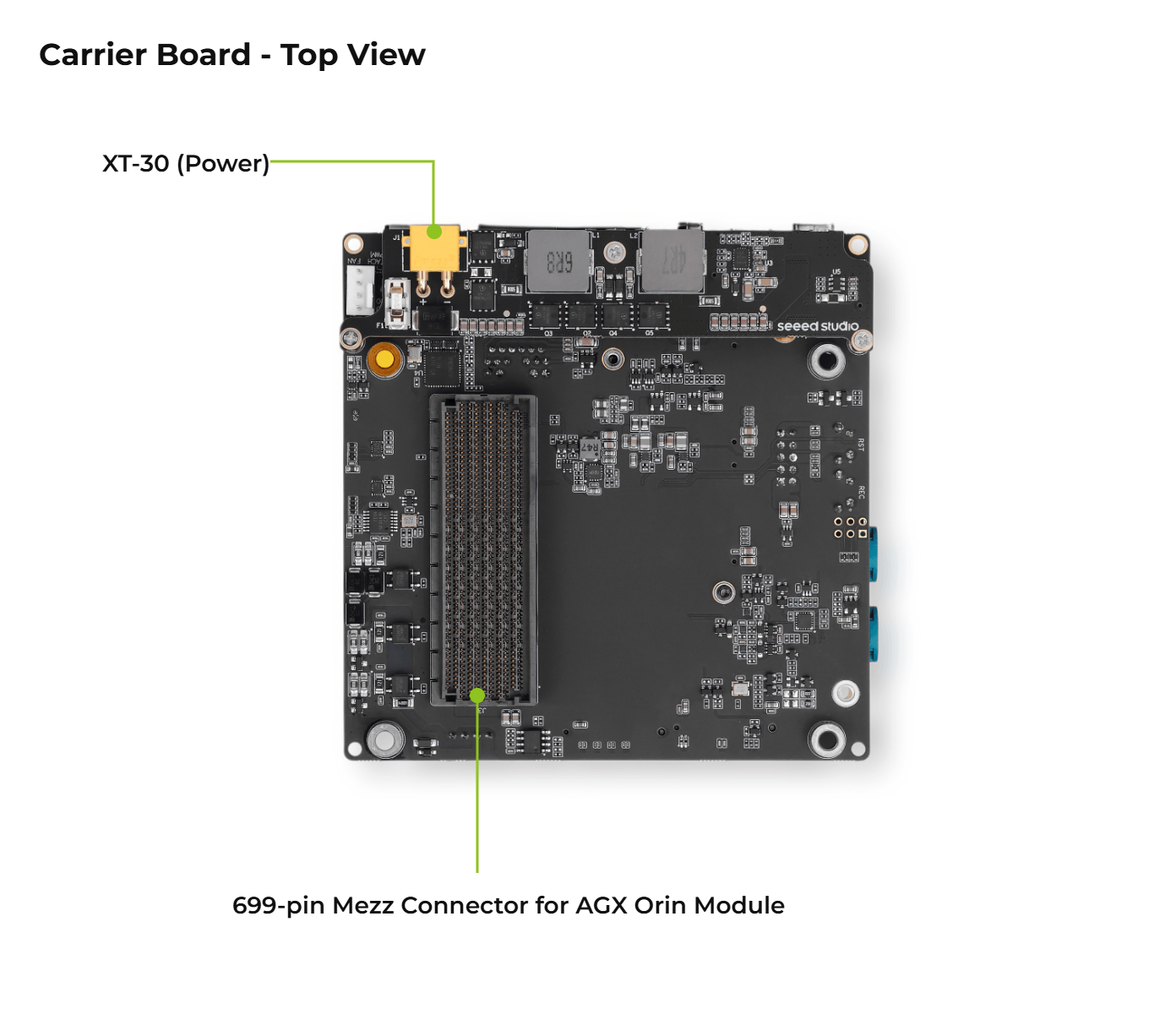 |
| 側面図 |
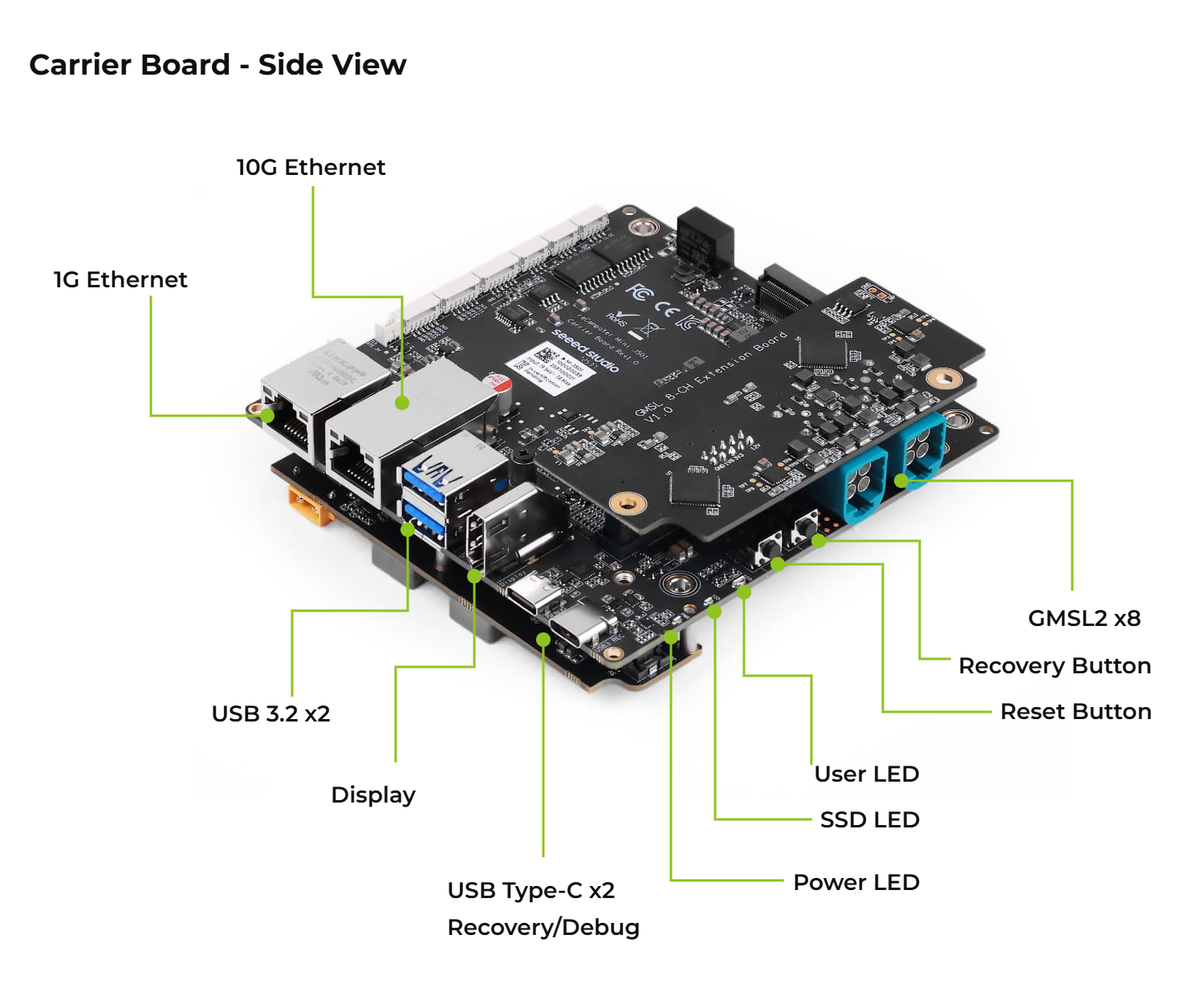 |
| 底面図 |
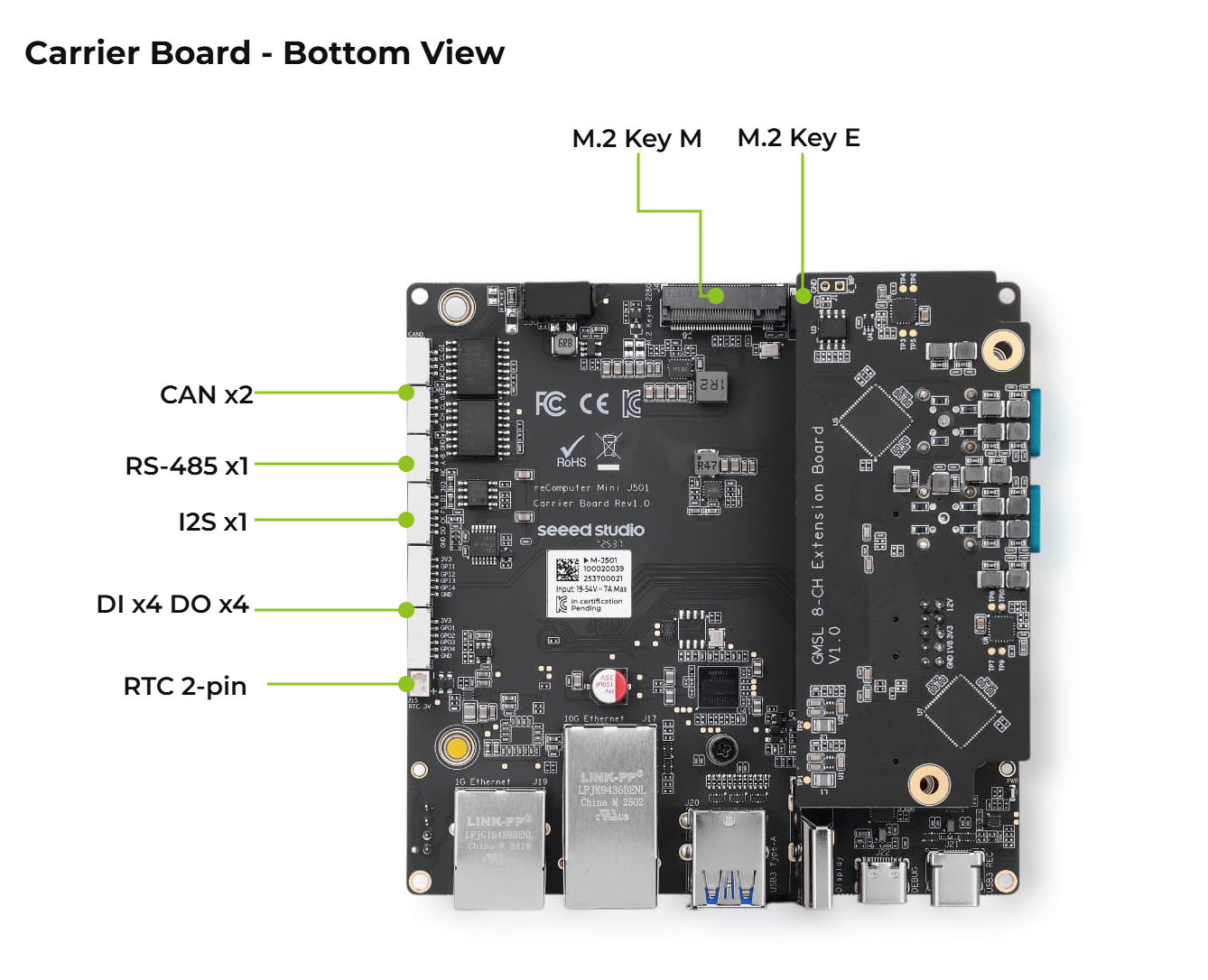 |
📝 同梱物一覧
- Robotics J501-Mini キャリアボード x 1
- 電源およびJST拡張ボード x 1
- XT30 から DC ケーブル x 1
- USB ケーブル(Type A - Type C)x 1
- 拡張ボード用ヒートシンク x 1
- スタッド(M3*30)x 5
- M3 六角ナット x 5
- Jetson モジュールおよび M.2 Key M 用ネジ(CM2.5*L.4)x3
- M.2 Key E 用ネジ(CM2*3.0)x1
- M.2 Key B 用スタッド(M2*2.0)x1
- M.2 Key B 用ネジ(CM3*4.0)x1
- ユーザーマニュアル x 1
1.高電圧電源および高温環境で動作させる場合は、Thermal Design Guide に従って堅牢な放熱ソリューションを設計してください。 2.より良い性能のために、モジュールにヒートシンクを取り付けてください。 3.高電圧入力かつ高負荷で動作中は、やけど防止のためヒートシンクに触れないでください。 4.検証用の電源アダプタについては、Seeed公式サイトで推奨されている電源アダプタを使用してください。
- 19V/4.74A 5525 バレルジャック電源アダプタ
- 最大消費電力要件を満たしていることを確認してください。 2.AC 電源コードの互換性
- ご利用の地域に応じて、地域仕様のACクローバーリーフ電源コードを購入してください。 3.アクセサリの互換性
- 最適な性能と互換性を得るために、公式に推奨されているアクセサリ(ワイヤレスモジュール、カメラ、周辺機器など)のみを使用してください。
🔍 仕様
キャリアボード仕様
| カテゴリ | 項目 | 詳細 |
|---|---|---|
| ストレージ | M.2 KEY M PCIe | 1x M.2 KEY M PCIe(M.2 NVMe 2280 SSD) |
| ネットワーキング | M.2 KEY E | WiFi/Bluetooth モジュール用 M.2 Key E ×1 |
| Ethernet | 1x RJ45 10GbE && 1x RJ45 1GbE | |
| I/O | USB | USB 3.2 Type-A(10Gbps)×2; USB 2.0 Type C(デバッグ)×1; USB 3.0 Type C(リカバリ/デバッグ)×1 |
| カメラ | 4-in-1 GMSL2 Mini-Fakra コネクタ ×2(オプション); | |
| CAN | CAN JST 4ピンコネクタ(GH 1.25)×2; | |
| DI/DO | DI JST 6ピンコネクタ(GH 1.25)×1; DO JST 5ピンコネクタ(GH 1.25)×1; | |
| I2S | I2S JST 6ピンコネクタ(GH 1.25)×1 | |
| RS485 | RS-485 JST 4ピンコネクタ(GH 1.25)×1 | |
| UART | UART JST 6ピンコネクタ ×1(DO と多重化) | |
| ディスプレイ | HDMI 2.1 ×1 | |
| ファン | 4ピンファンコネクタ(12V PWM)×1 | |
| 拡張ポート | カメラ拡張ヘッダ ×2(GMSL2 ボード用) | |
| RTC | RTC 2ピン ×1; | |
| LED | PWR LED(緑)×1; SSD LED(緑)×1; USR LED(RGB)×1 | |
| ボタン | リカバリボタン ×1; RESET ボタン ×1 | |
| 電源 | 19-48V XT30(XT30 から 5525 DC ジャックケーブル付属) | |
| Jetpack バージョン | Jetpack 6.2.1 | |
| 機構 | 寸法(W x D x H) | 110mm x 110mm x 38mm |
| 重量 | 200g | |
| 設置方法 | デスク設置、壁掛け | |
| 動作温度 | -20℃~60℃(25W モード); -20℃~55℃(MAXN モード); (reComputer Robotics ヒートシンク+ファン使用時) | |
| 保証 | 2 年 | |
| 認証 | RoHS, REACH, CE, FCC, UKCA, KC | |
📦 JetPack OS をフラッシュする
対応モジュール
事前準備
- Ubuntu ホストPC
- Robotics J501 Mini キャリアボード
- NVIDIA® Jetson AGX Orin モジュール
- Nano/NX モジュール用アクティブファン
- NVMe M.2 2280 内蔵 SSD
- USB Type-C データ転送ケーブル
仮想マシンではなく、物理的な Ubuntu ホストデバイスを使用することを推奨します。 ホストマシンを準備する際は、以下の表を参照してください。
| JetPack Version | Ubuntu Version (Host Computer) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
Jetpack イメージの準備
ここでは、使用している Jetson モジュールに対応するシステムイメージを Ubuntu PC にダウンロードする必要があります。
| Jetpack バージョン | Jetson モジュール | GMSL | ダウンロードリンク1 | SHA256 |
|---|---|---|---|---|
| 6.2.1 | AGX Orin 64GB | ✅ | Download | f0efee5f265dbaef49dc14d517b269e 7f6582ff9977d9193d377966f36408ec3 |
| AGX Orin 32GB | ✅ | Download | 0a97cbb6d708776bd97608594c60c3 4208b5d5dc6efbfc5553edd9c5a95802f6 |
Jetpack6 のイメージファイルは約 14.2GB あり、ダウンロードにはおよそ60分かかります。ダウンロード完了までお待ちください。
ダウンロードしたファームウェアの完全性を確認するには、SHA256 ハッシュ値を比較します。
Ubuntu ホストマシンでターミナルを開き、sha256sum <File> コマンドを実行して、ダウンロードしたファイルの SHA256 ハッシュ値を取得します。出力されたハッシュ値がWikiに記載されている SHA256 ハッシュと一致すれば、ダウンロードしたファームウェアが完全で破損していないことが確認できます。
⚙️ SEEED の Jetson キャリアボード向けのすべての .dts ファイルおよびその他のソースコードは Linux_for_Tegra からダウンロードできます
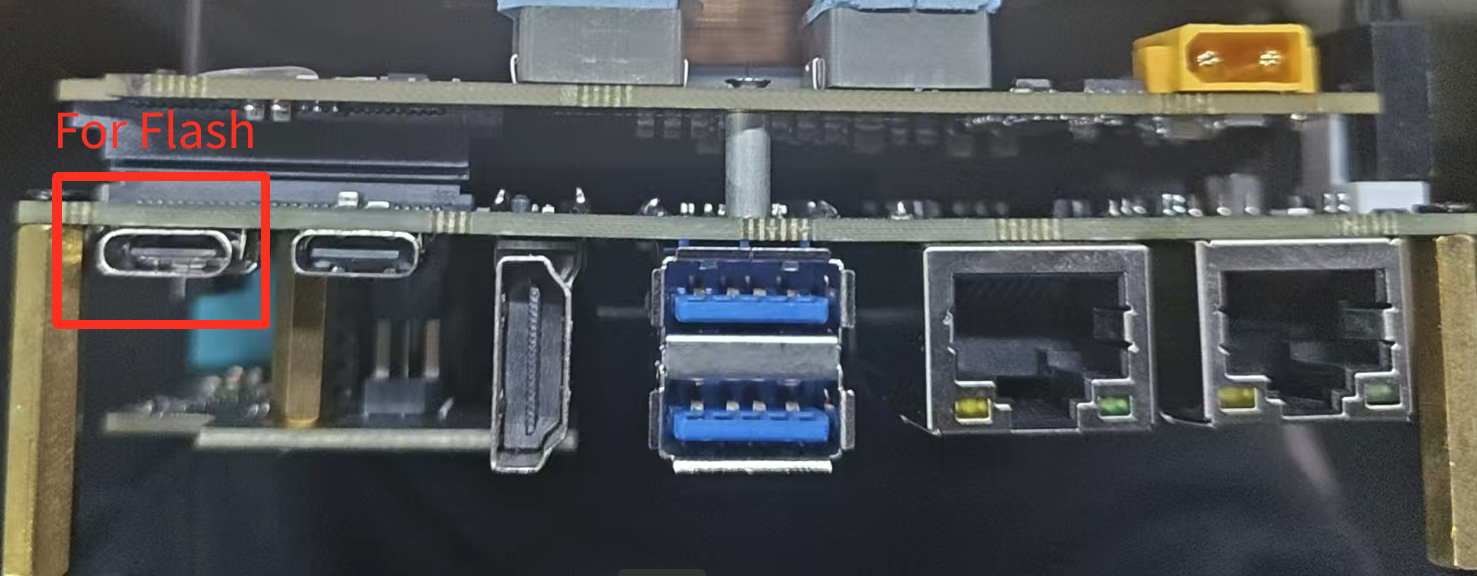
Force Recovery モードに入る
インストール手順に進む前に、ボードが Force Recovery モードになっていることを確認する必要があります。
手順
Step 1. ボタンを押し続けて RESET モードにします。

Step 2. 電源ケーブルを接続してキャリアボードの電源を入れ、その後 REC ボタンを離します。
Step 3. USB Type-C データ転送ケーブルでボードを Ubuntu ホストPCに接続します。
Step 4. Linux ホストPCでターミナルウィンドウを開き、lsusb コマンドを入力します。使用している Jetson SoM に応じて、返された内容に次のいずれかの出力が含まれていれば、ボードは Force Recovery モードになっています。
- AGX Orin 32GB の場合: 0955:7223 NVidia Corp
- AGX Orin 64GB の場合: 0955:7023 NVidia Corp
以下の画像は AGX Orin 32GB の場合です:

Jetson へのフラッシュ
ステップ 1: ダウンロードしたイメージファイルを解凍します:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-mini-agx-orin-32g-j501-6.2.1-36.4.4-2026-02-11.tar.gz
ステップ 2: 次のコマンドを実行して JetPack システムを NVMe SSD にフラッシュします:
cd mfi_xxxx
# For example: cd mfi_recomputer-orin-robotics-j501
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
フラッシュ処理が正常に完了すると、次のような出力が表示されます

フラッシュコマンドの実行には 2〜10 分かかる場合があります。
ステップ 3: Robotics J501-Mini をディスプレイに接続します。PD から HDMI へのアダプタを使用して HDMI 入力対応ディスプレイに接続するか、PD ケーブルを使用して PD 入力対応ディスプレイに直接接続し、初期設定を完了します:

System Configuration は、ニーズに応じて完了させてください。
🔌 インターフェースの使用方法
ここでは、Robotics j501-Mini ボードの各種インターフェースとその使用方法について説明します。
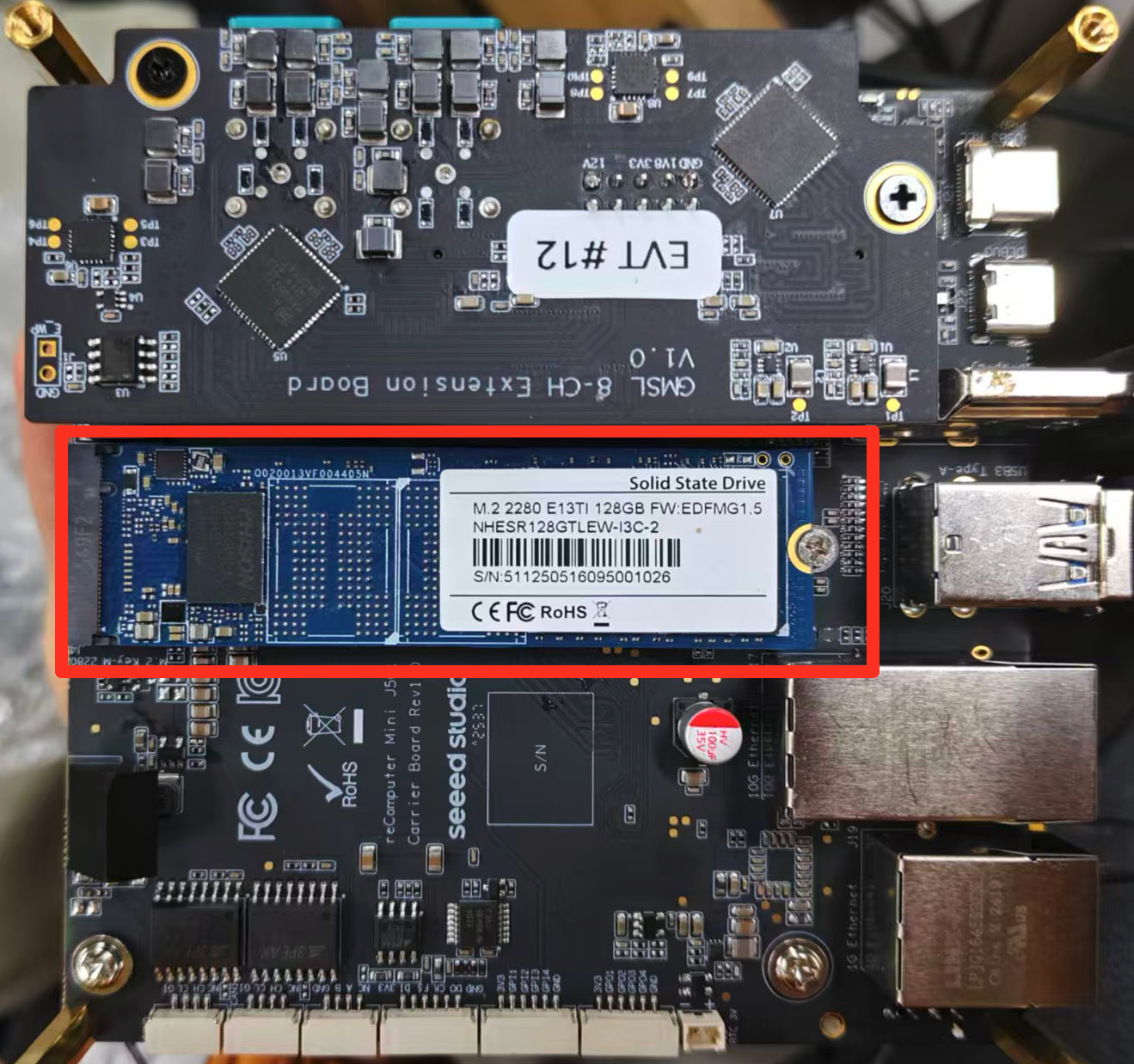
M.2 Key M
M.2 Key M は高速 NVMe SSD 用に設計されており、ロボティクスアプリケーション向けに超高速データ転送を提供します。
対応 SSD は以下のとおりです
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
ハードウェア接続
使用手順
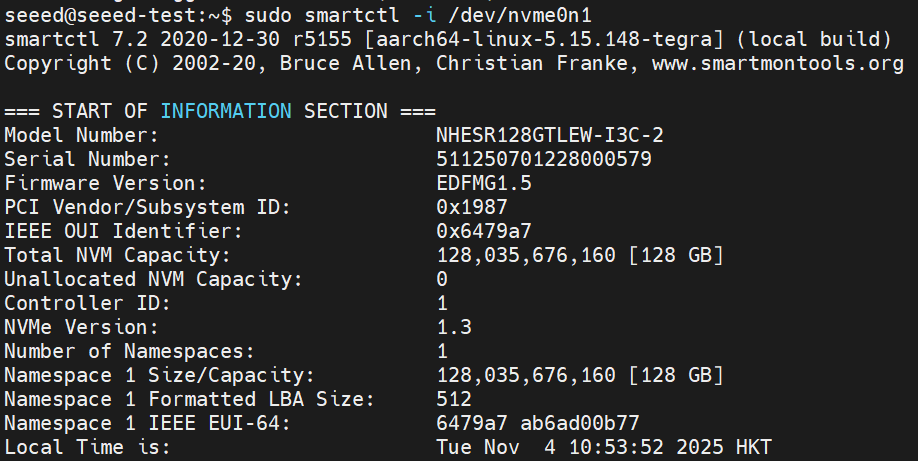
SSD の読み書き速度をテストする前に、Jetson のターミナルで次のコマンドを入力します:
sudo apt update
sudo apt install smartmontools
sudo smartctl -i /dev/nvme0n1
SSD の読み書き速度をテストするスクリプトファイルを作成します:
#You need to create a blank test file first
cat <<'EOF' | sudo tee test_nvme.sh >/dev/null
#!/usr/bin/env bash
set -e
sudo dd if=/dev/zero of=test bs=1000M count=1 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=test of=/dev/null bs=1000M count=1
sudo rm -rf test
EOF
スクリプトを実行して SSD の読み書き速度をテストします:
sudo chmod +x test_nvme.sh
./test_nvme

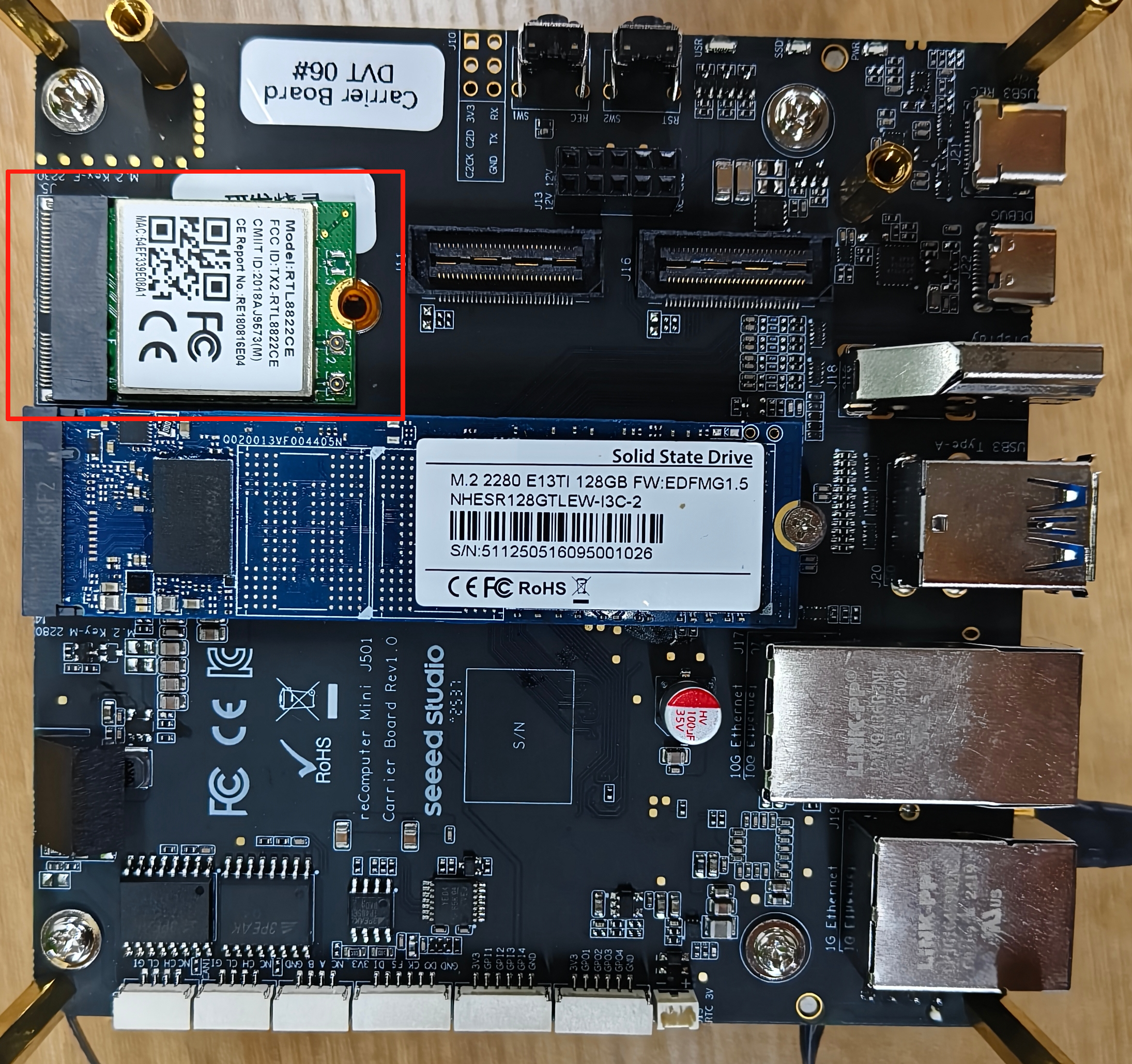
M.2 Key E
M.2 Key E インターフェースは標準的な M.2 コネクタで、主に Wi-Fi や Bluetooth などの無線モジュールを接続し、無線通信機能を拡張するために使用されます。
ハードウェア接続
使用手順
Wi-Fi の性能をテストするには、次のコマンドを使用します(IP アドレスはテストサーバーのものに置き換えてください):
iperf3 -c 192.168.6.191

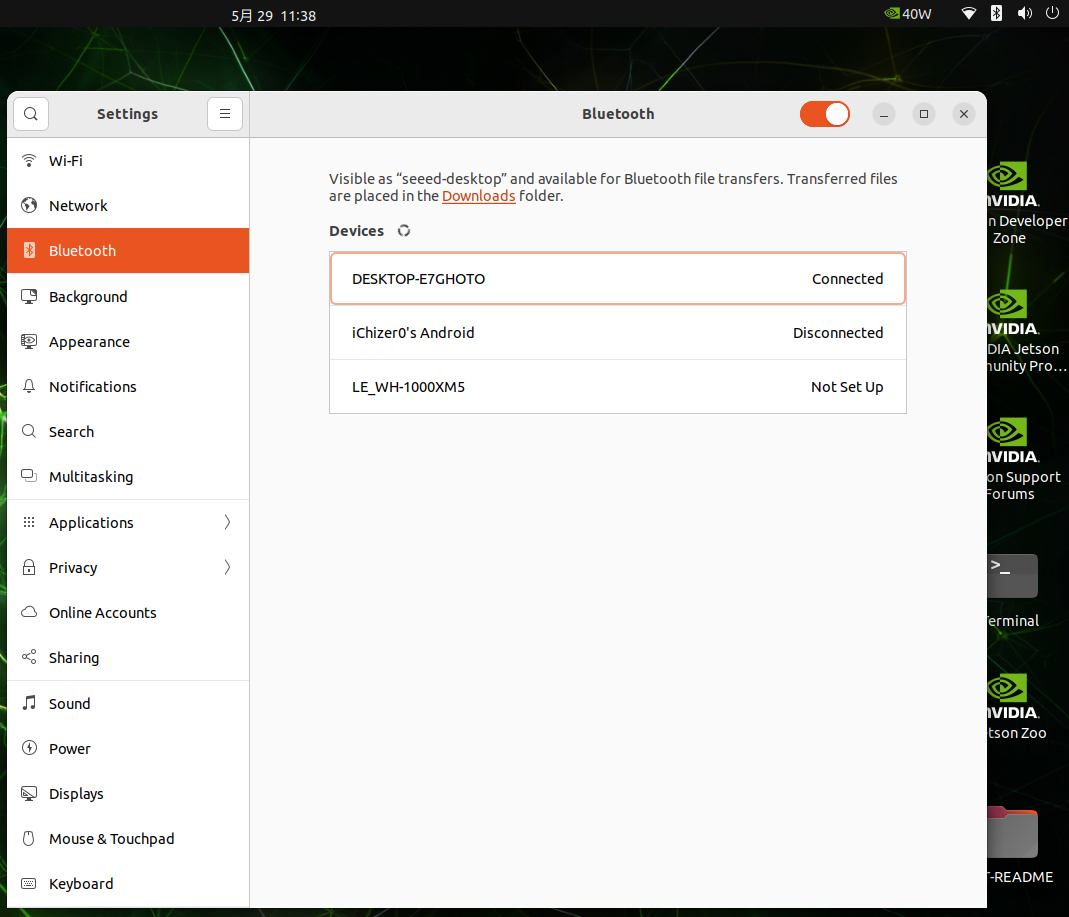
Bluetooth 機能は M.2 Key E スロット経由で利用できます。
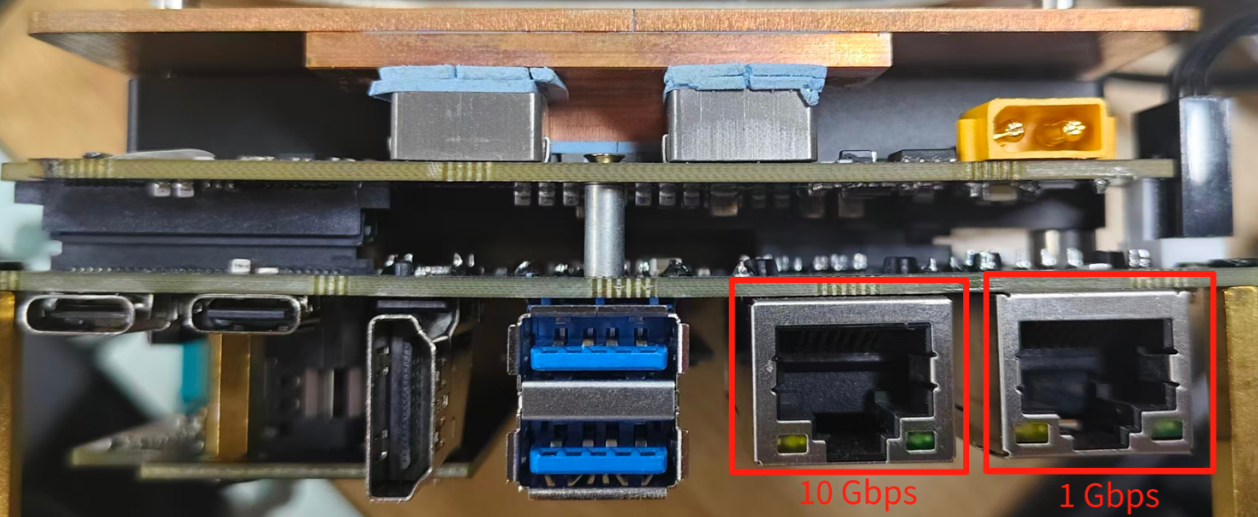
Ethernet
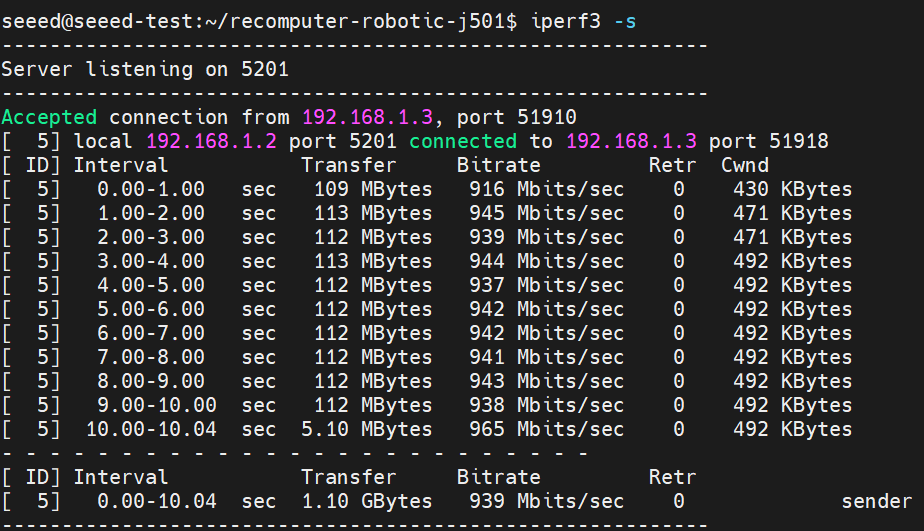
Robotics j501-Mini キャリアボードには、1Gbps と 10Gbps の RJ45 Ethernet ポートがそれぞれ 1 つずつ搭載されており、高速な有線ネットワーク接続が可能です。
Ethernet ポートの速度をテストするには、次のように iperf3 を使用します:
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> は iperf3 サーバーの IP アドレスです。クライアントはこのサーバーに接続して帯域幅テストを実行します。
<bind_ip> は、テストトラフィックの送信元として指定したローカル IP アドレスをバインドします。
LED
J501 Mini には制御可能な LED が 2 つ搭載されています。以下では、LED を 緑、赤、青 に制御する方法を示します。
使用手順
LED を制御するための参考コマンドは次のとおりです:
#change to red
echo 1 | sudo tee /sys/class/leds/on-board:red/brightness
echo 0 | sudo tee /sys/class/leds/on-board:red/brightness
#change to green
echo 1 | sudo tee /sys/class/leds/on-board:green/brightness
echo 0 | sudo tee /sys/class/leds/on-board:green/brightness
#change to blue
echo 1 | sudo tee /sys/class/leds/on-board:blue/brightness
echo 0 | sudo tee /sys/class/leds/on-board:blue/brightness
LED 制御の効果は、以下の図のようになります:



USB
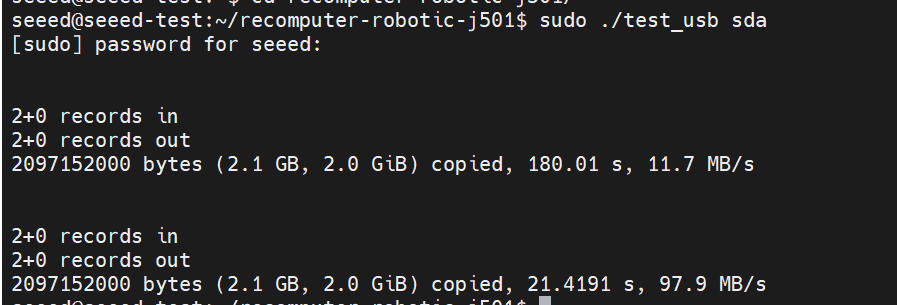
Robotics j501-Mini キャリアボードには、2 つの USB 3.2 Type-A ポート(10Gbps)、1 つの USB 3.0 Type-C ポート、およびデバイスモード/デバッグ用の USB 2.0 Type-C ポートが搭載されており、多様な接続オプションを提供します。
USB-A 速度テスト
USB デバイスの速度をテストするスクリプトを作成します:
sudo vim test_usb
次の内容を貼り付けます:
cat <<'EOF' | sudo tee test_usb.sh >/dev/null
#!/bin/bash
sudo dd if=/dev/zero of=/dev/$1 bs=1000M count=2 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=/dev/$1 of=/dev/null bs=1000M count=2
EOF
スクリプトに実行権限を与えてテストします:
sudo chmod +x test_usb
./test_usb
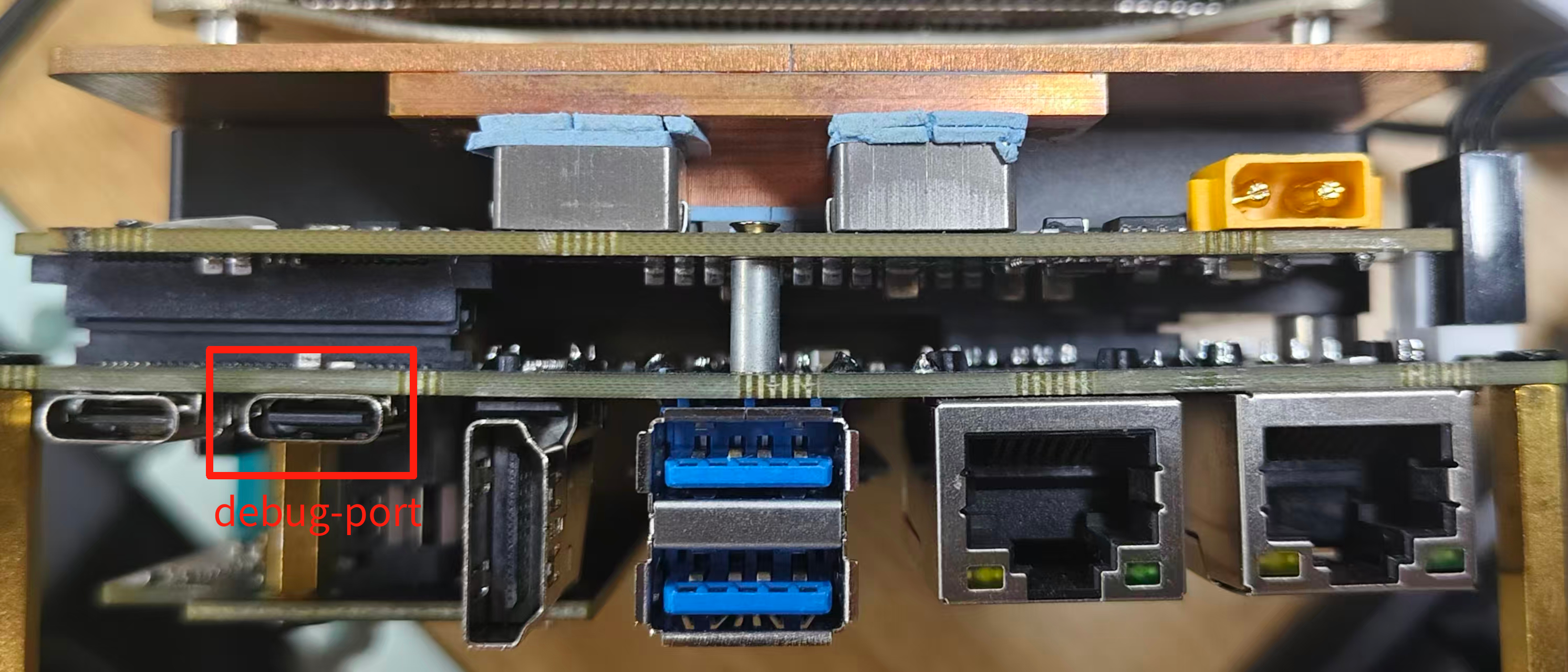
USB 2.0 Type-C ポート
このシリアルポートを USB-C データケーブル経由で使用することで、PC 側で入出力のデバッグ情報をモニタリングできます。
PC(Jetson ではなく)側でシリアルポートログインツールをインストールし、/dev/ttyUSB0 にログインします(ttyUSB1 や 2 の場合もあります):
sudo apt update
sudo apt install screen
screen /dev/ttyUSB0 115200
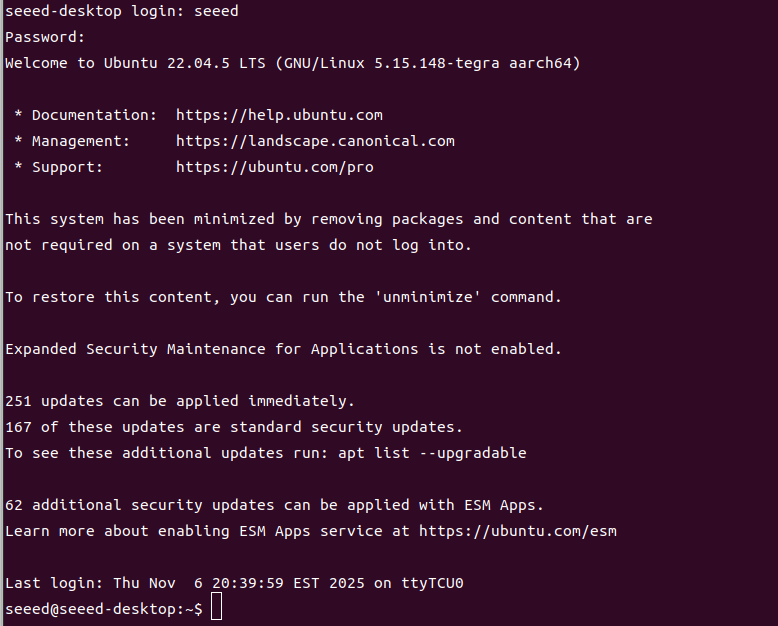
その後、別の Linux ホスト上のシリアルポート経由で、Jetson のターミナルを次のように操作できます:
Fan
reComputer Jetson Robotics j501-Mini には次のものが搭載されています:
- 1x 4 ピンファンコネクタ (12V PWM): 標準的な 12V PWM ファンと互換性があり、精密な回転数制御もサポートするため、高性能な冷却が必要な用途に最適です。
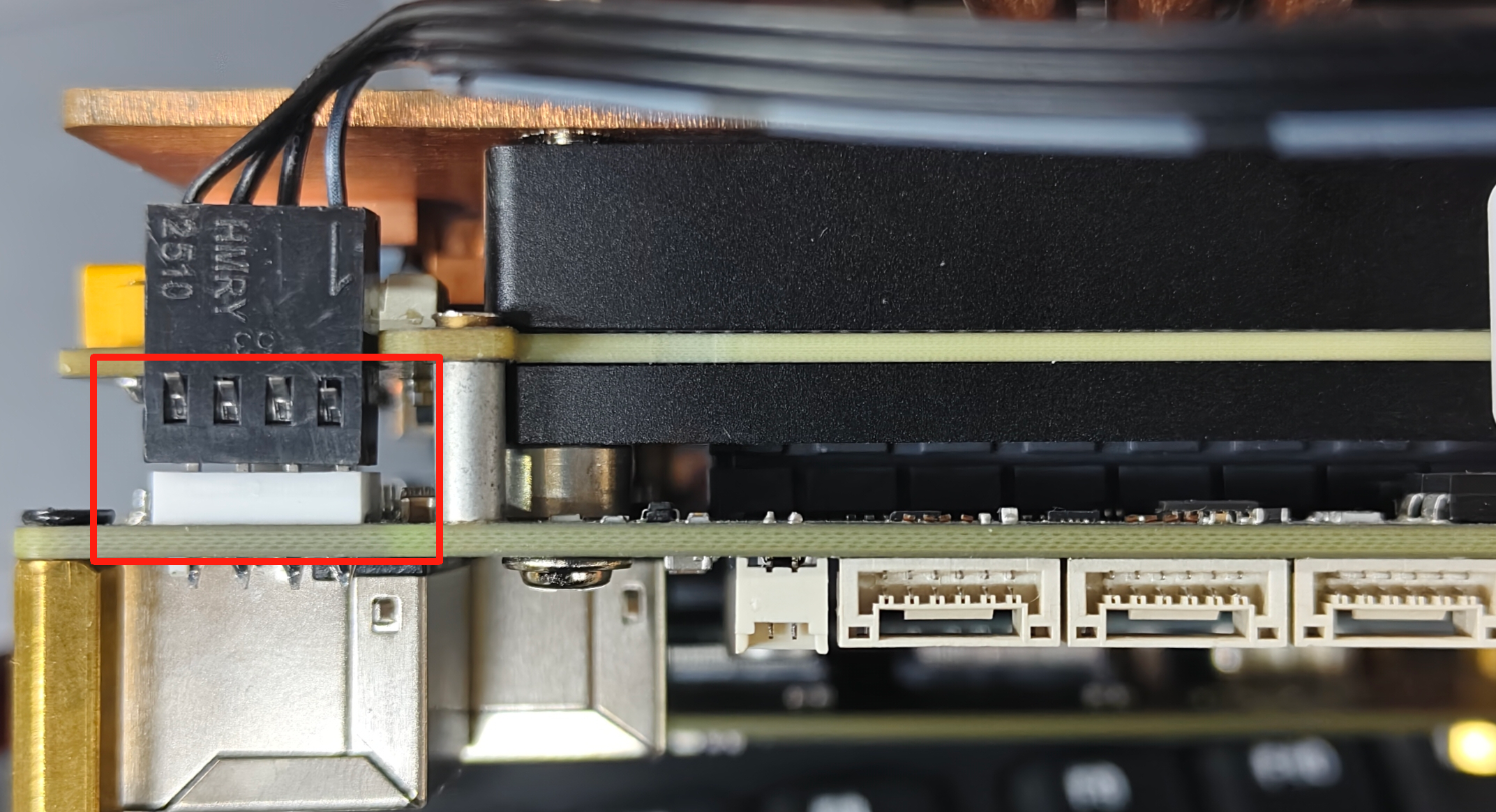
ハードウェア接続
Robotics J501 Mini には、ファン用の標準 4 ピンヘッダが用意されています。
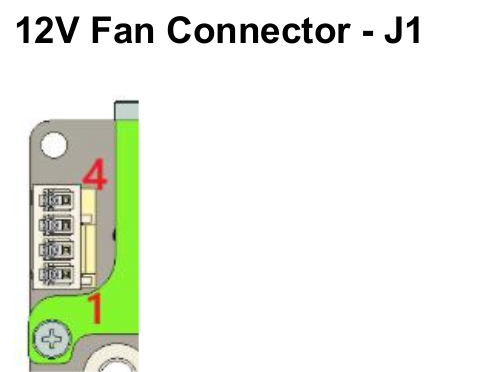
Fan のデータシート回路図は以下のとおりです:
J1 のピン定義は次のとおりです:
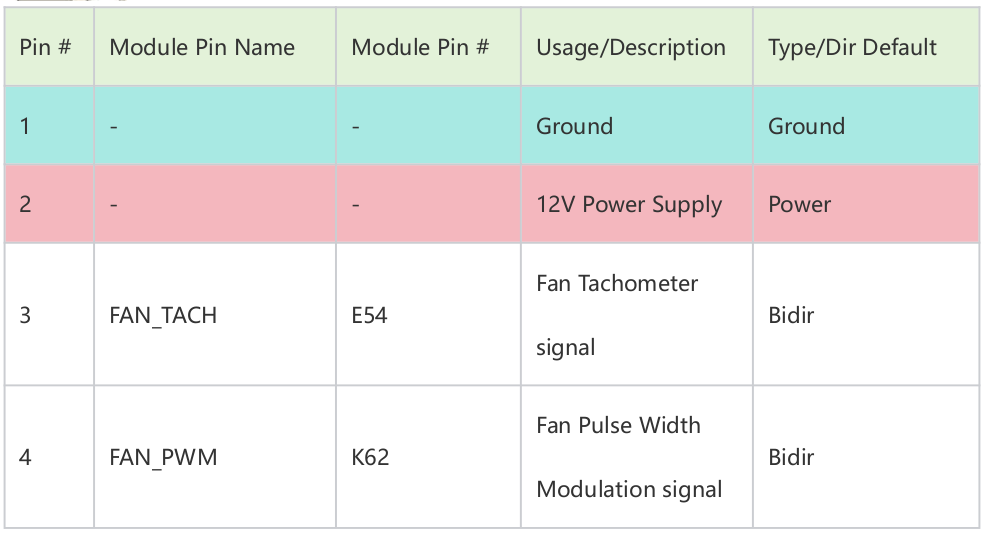
詳細についてはこちらを参照してください。
使用手順
ファン速度を設定するスクリプトを作成します:
cat test_fanSpeedSet
次の内容を貼り付けます:
#!/bin/bash
sudo systemctl stop nvfancontrol
sleep 2
echo "000000" | sudo -S chmod 777 /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
echo $1 > /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
さらに、jtop ツールを使用してファン速度を手動で設定することもできます。
CAN
CAN(Controller Area Network)は、ホストコンピュータなしでマイコンやデバイス同士が通信できる、堅牢な車載バス規格です。
J501 Mini には JST 4 ピン(GH1.25)に統合された 2 つの CAN インターフェースが用意されています。さらに、両方の CAN インターフェースは CAN-FD をサポートしており、CAN0 と CAN1 は次のように示されています:
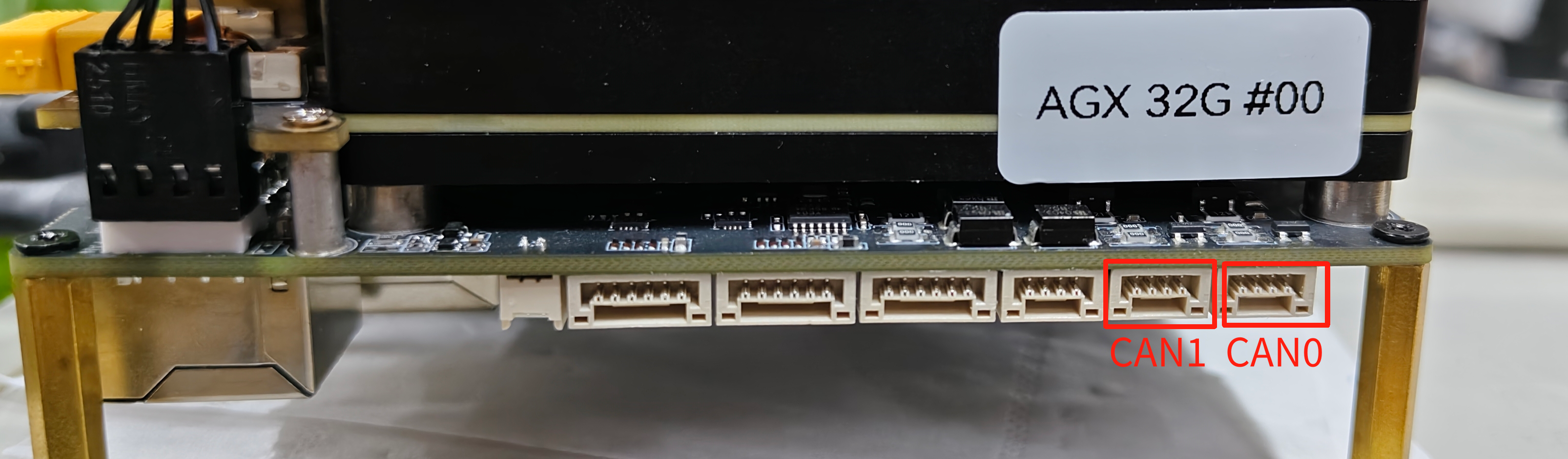
CAN0 と CAN1 のピン配置定義は同様で、インターフェース図は以下のとおりです:
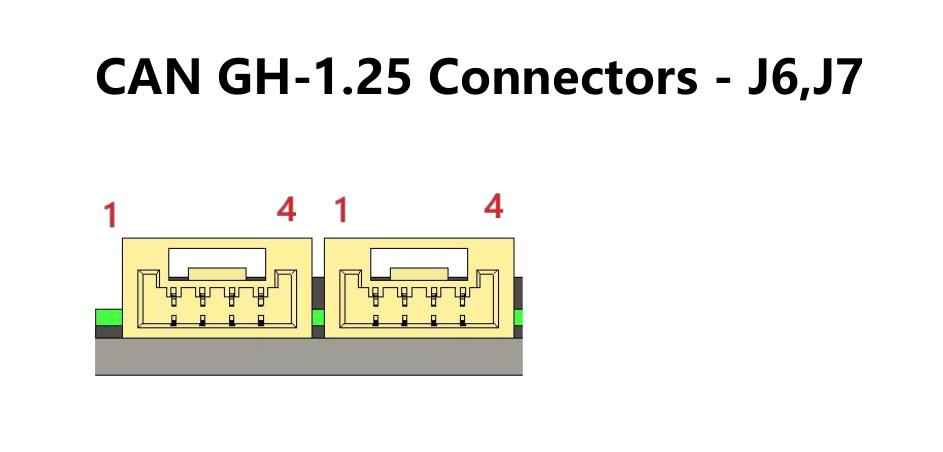
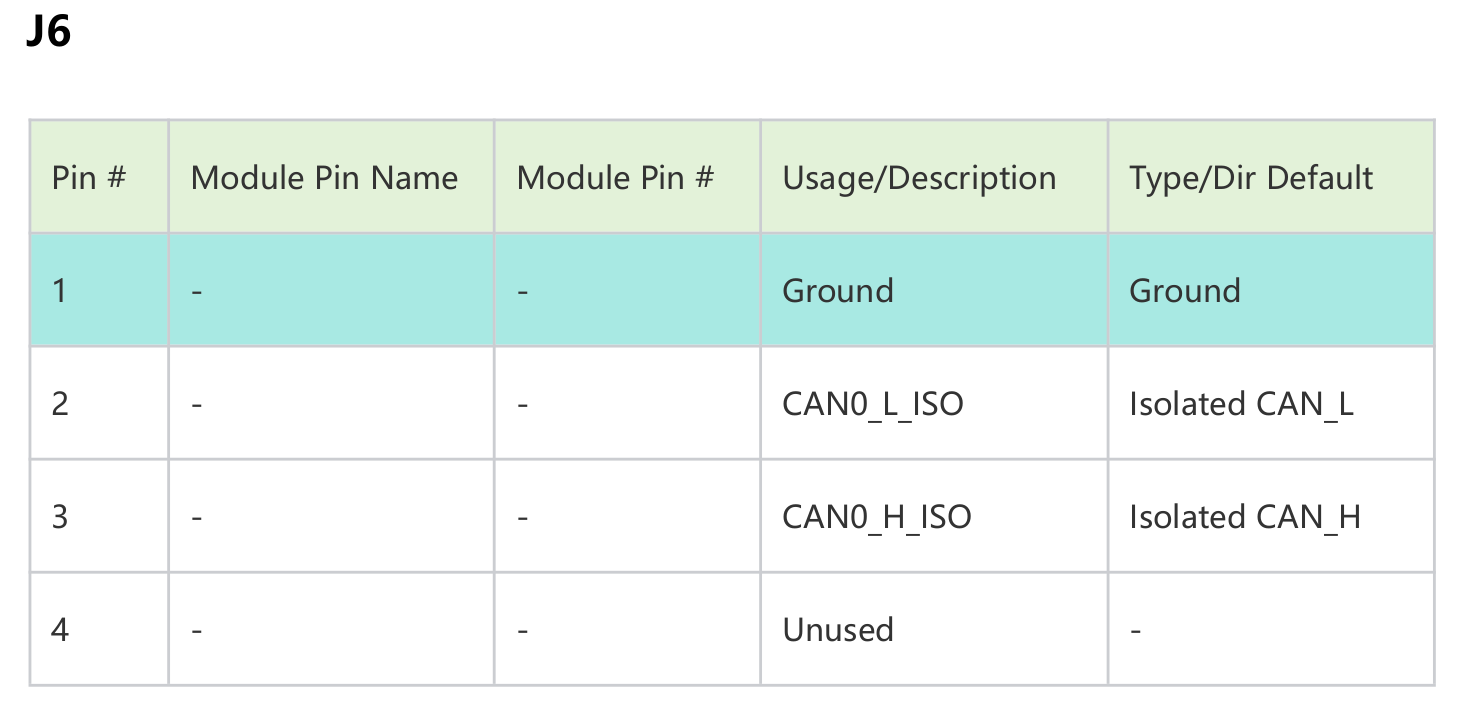
CAN0 は J6 に対応しており、ピン定義は次のとおりです:
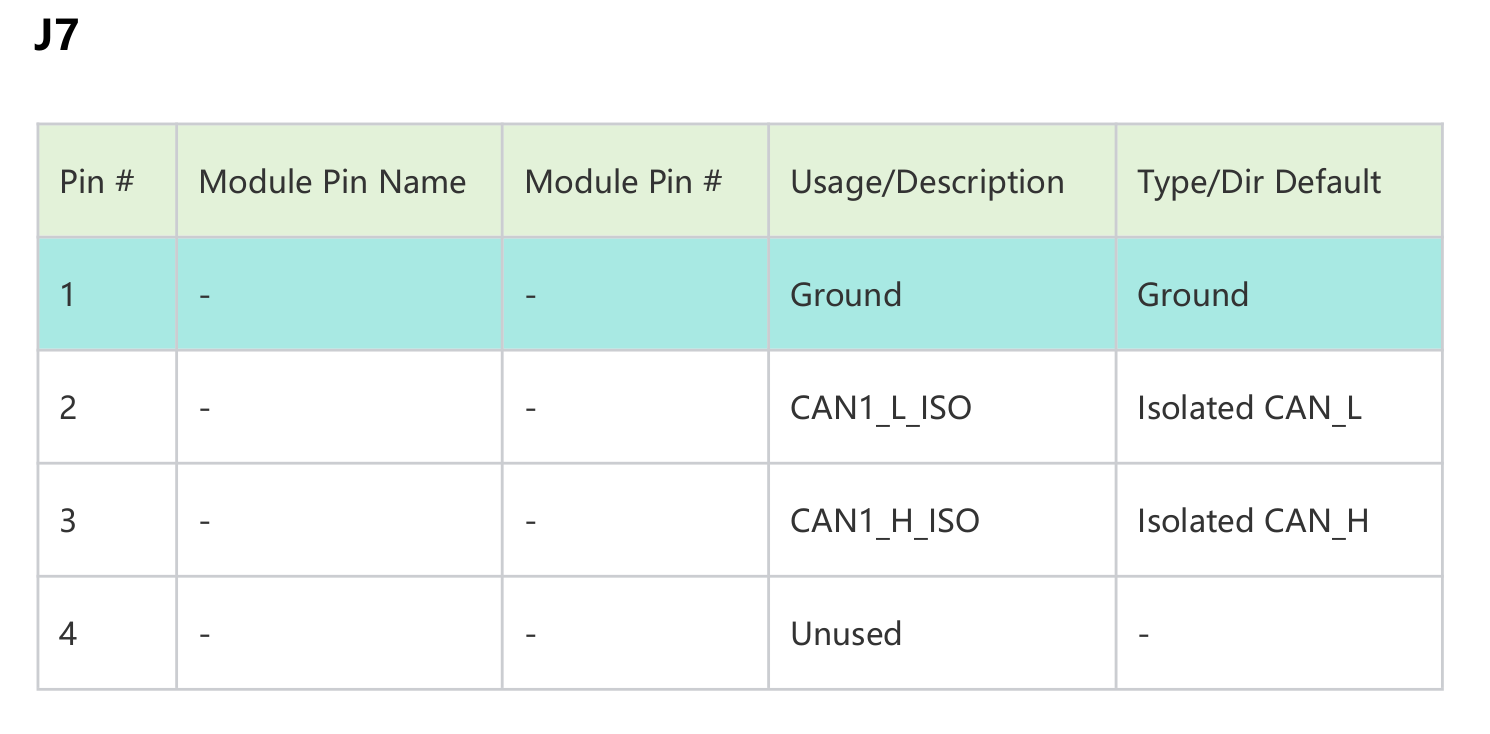
CAN1 は J7 に対応しており、ピン定義は次のとおりです:
CAN 通信
このセクションでは、Jetson 上の CAN0 と CAN1 を接続し、Classic CAN mode と CAN-FD mode で CAN0 と CAN1 間のデータ送受信を行う方法を示します。
CAN0 と CAN1 の終端抵抗は、gpiochip1 line4 にある PAA.04 と、gpiochip1 line7 にある PAA.07 の 2 本のピンで制御できます。
終端抵抗の制御は次のルールに従います:
When `PAA.04 = 1`, the 120 Ω termination resistor of CAN0 is **disconnected**;
when `PAA.04 = 0`, the 120 Ω termination resistor of CAN0 is **connected**.
When `PAA.07 = 1`, the 120 Ω termination resistor of CAN1 is **disconnected**;
when `PAA.07 = 0`, the 120 Ω termination resistor of CAN1 is **connected**.
gpiochip 1 上のピンを表示するには、次のコマンドを入力します:
gpioinfo gpiochip1
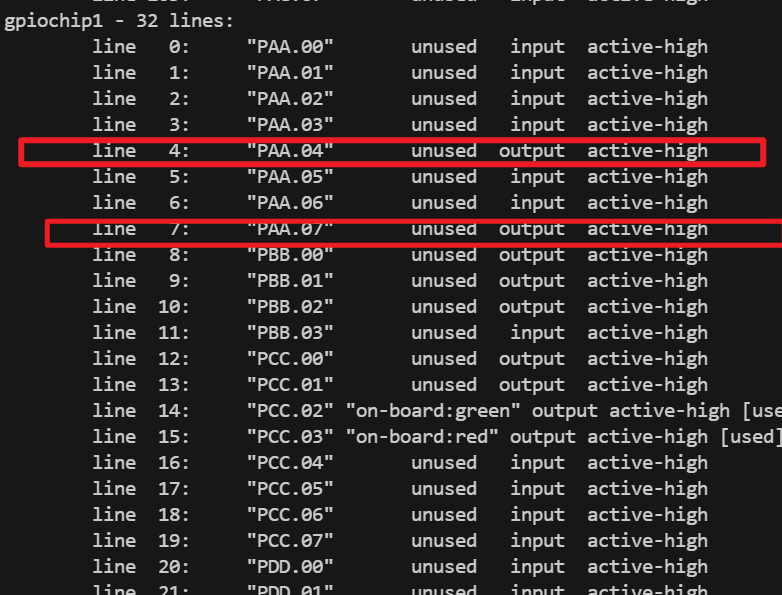
次のコマンドを参照して、PAA.04 と PAA.07 を 0 に設定します:
sudo gpioset --mode=wait gpiochip1 4=0
sudo gpioset --mode=wait gpiochip1 7=0
次のコマンドを参照して、PAA.04 と PAA.07 を 1 に設定します:
sudo gpioset --mode=wait gpiochip1 4=1
sudo gpioset --mode=wait gpiochip1 7=1
Classic CAN モード
標準モードで CAN0 と CAN1 間のデータ送受信をテストするために、test_can.sh を作成します:
touch test_can.sh
chmod +x test_can.sh
sudo ./tets_can.sh
test_can.sh のスクリプトコードは次のとおりです:
test_can.sh
#!/bin/bash
echo "000000" | sudo -S ip link set can0 down
echo "000000" | sudo -S ip link set can1 down
# set buffer size
echo "000000" | sudo -S sysctl -w net.core.rmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.rmem_default=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_default=524288
#set to 2M bps
echo "000000" | sudo -S ip link set can0 type can bitrate 2000000
echo "000000" | sudo -S ip link set can0 up
echo "000000" | sudo -S ip link set can1 type can bitrate 2000000
echo "000000" | sudo -S ip link set can1 up
sleep 2
#Enable 5s to test
sudo pkill -f gpioset
gpioset --mode=time --sec=200000 gpiochip1 7=0 &
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip1 4=0 &
GPIO2_PID=$!
cangen can1 &
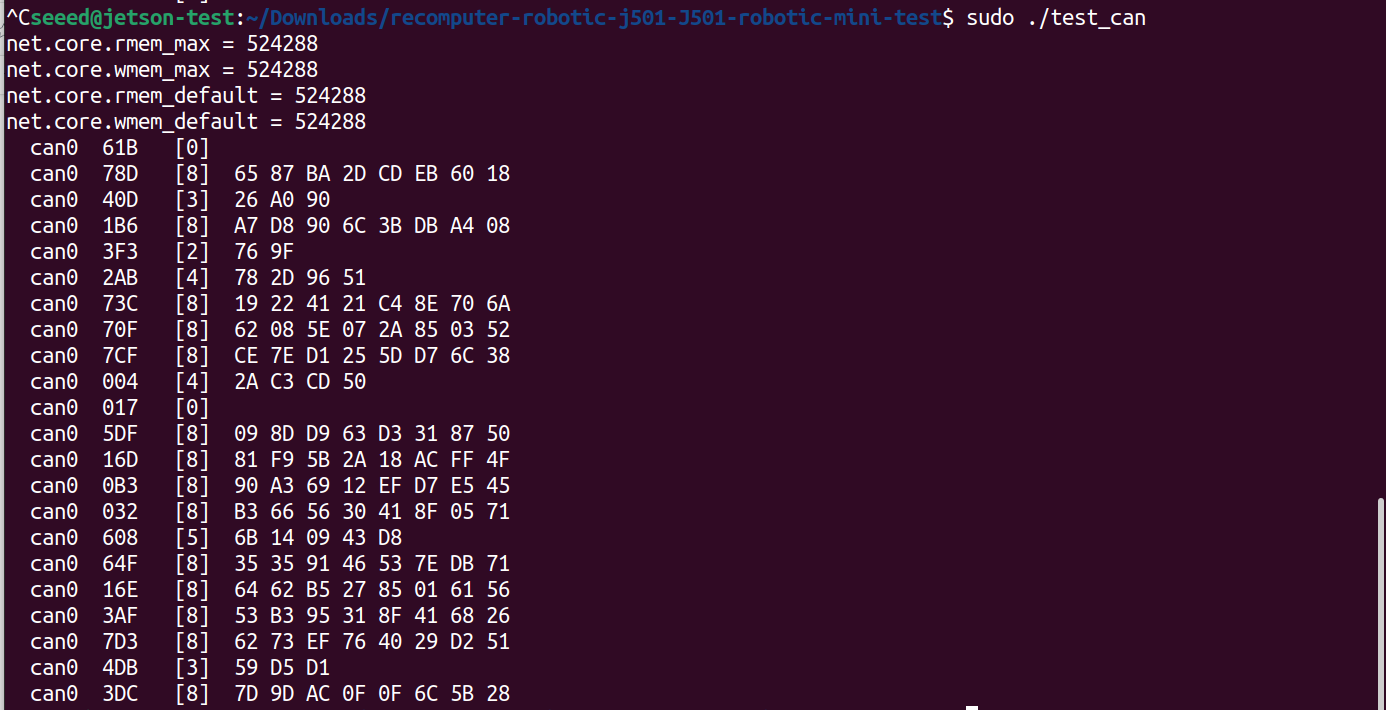
candump can0
CAN0 と CAN1 間のデータ送受信が完了します:
CAN-FD モード
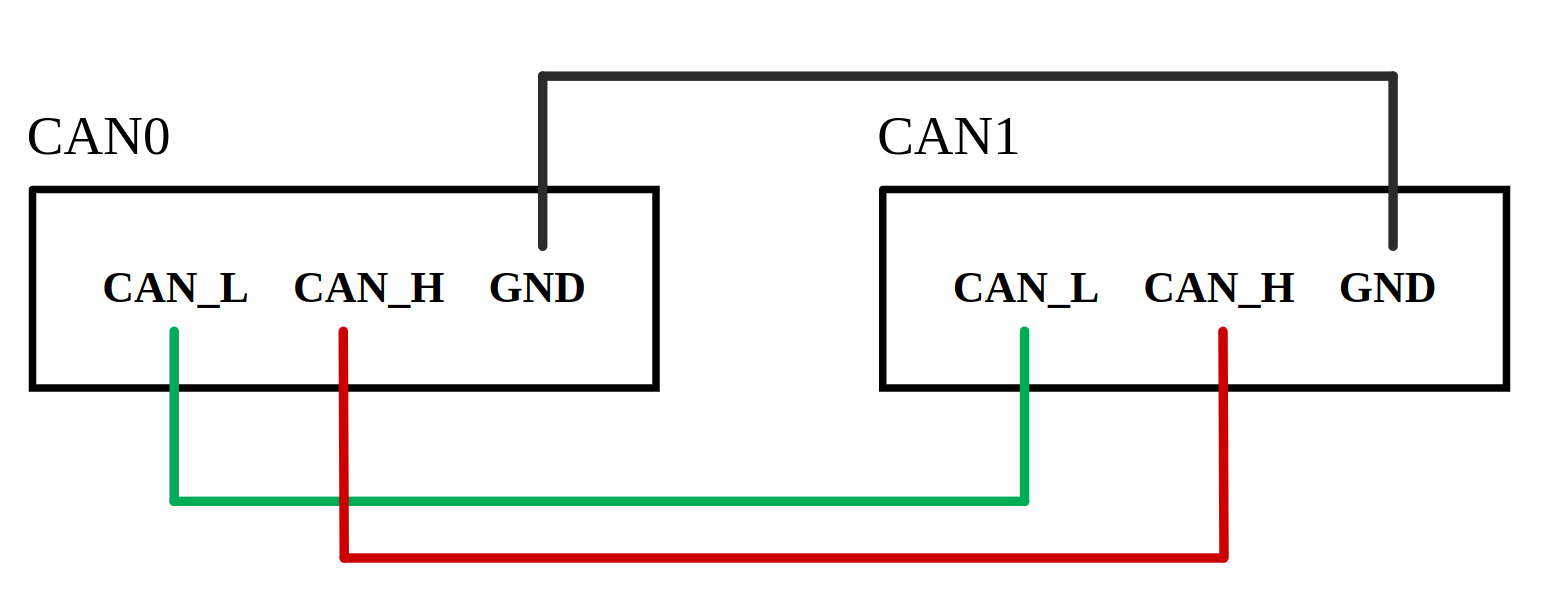
datasheet には、以下に示すような CAN0/CAN1 インターフェースの配線図が記載されています:
CAN-FD モードで CAN0 と CAN1 間のデータ送受信をテストするために、test_canfd.sh を作成します:
touch test_canfd.sh
chmod +x test_can.sh
sudo ./tets_can.sh
test_canfdfd.sh のスクリプトコードは次のとおりです:
test_canfd.sh
#!/bin/bash
# configure CAN FD mode
#CAN bus rate set to 500 kbps, data rate set to 5 Mbps.
echo "000000" | sudo -S ip link set can0 down
echo "000000" | sudo -S sudo ip link set can0 type can bitrate 500000 dbitrate 5000000 berr-reporting on fd on restart-ms 100
echo "000000" | sudo -S ip link set can0 up
echo "000000" | sudo -S ip link set can1 down
echo "000000" | sudo -S sudo ip link set can1 type can bitrate 500000 dbitrate 5000000 berr-reporting on fd on restart-ms 100
echo "000000" | sudo -S ip link set can1 up
# config buffer size
echo "000000" | sudo -S sysctl -w net.core.rmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_max=524288
echo "000000" | sudo -S sysctl -w net.core.rmem_default=524288
echo "000000" | sudo -S sysctl -w net.core.wmem_default=524288
# check CAN FD status
echo "CAN0 status:"
ip -details link show can0
echo "CAN1 status:"
ip -details link show can1
#Enable 5s to test
sudo pkill -f gpioset
gpioset --mode=time --sec=200000 gpiochip1 7=0 &
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip1 4=0 &
GPIO2_PID=$!
candump can0 &
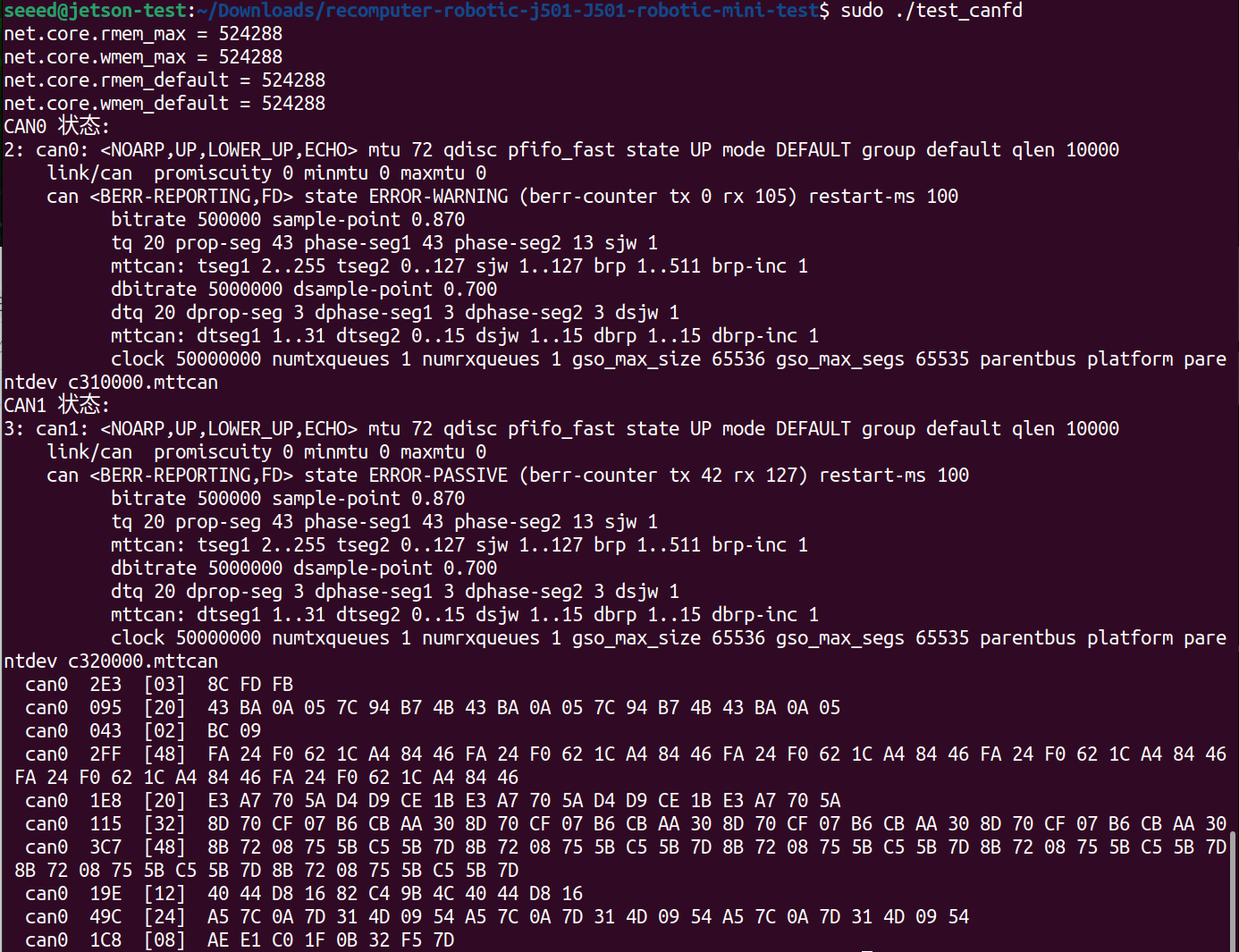
cangen can1 -f
CAN0 と CAN1 間のデータ送受信が完了します:
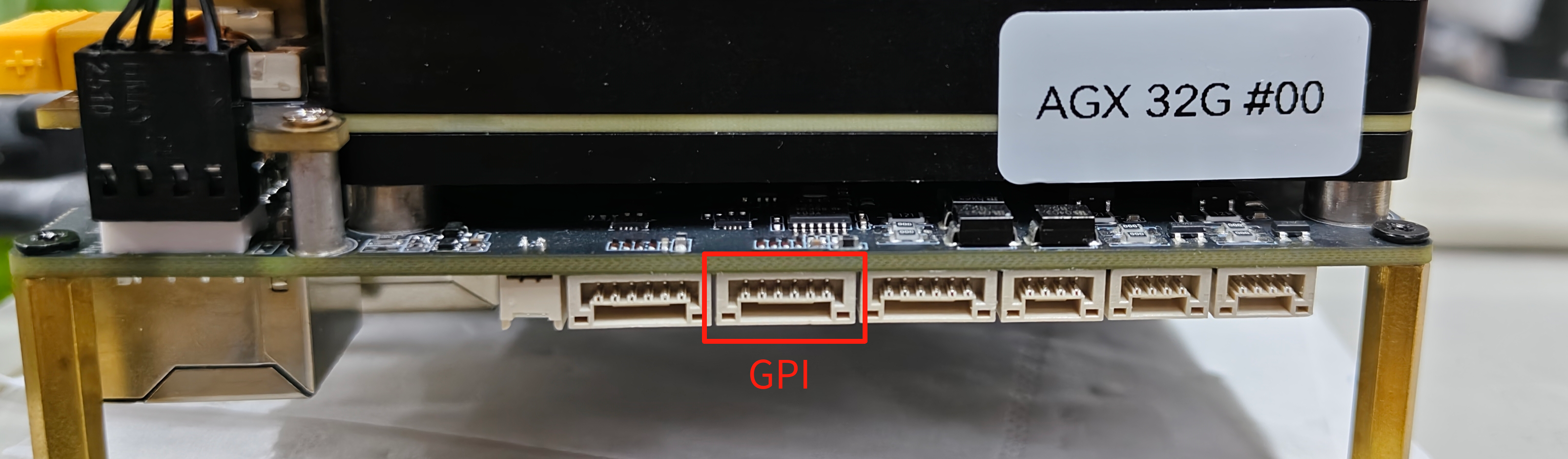
GPI および GPO
GPI
Robotics J501 Mini は、GPI 用に標準的な 6 ピン JST ヘッダを提供します。
GPI のデータシート回路図は次のとおりです:
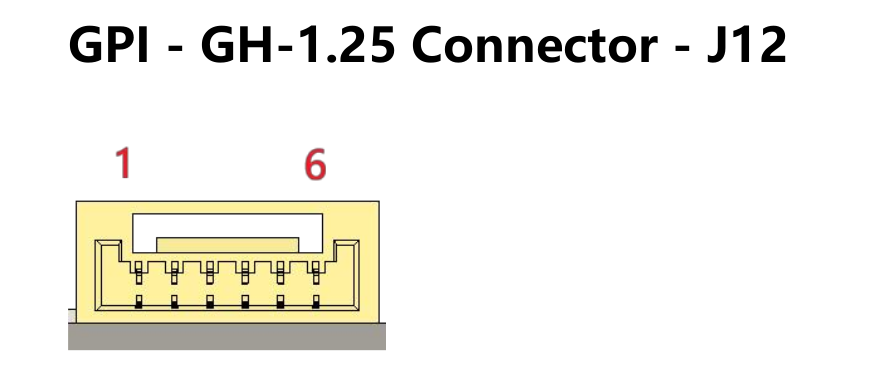
J12 のピン定義は次のとおりです:
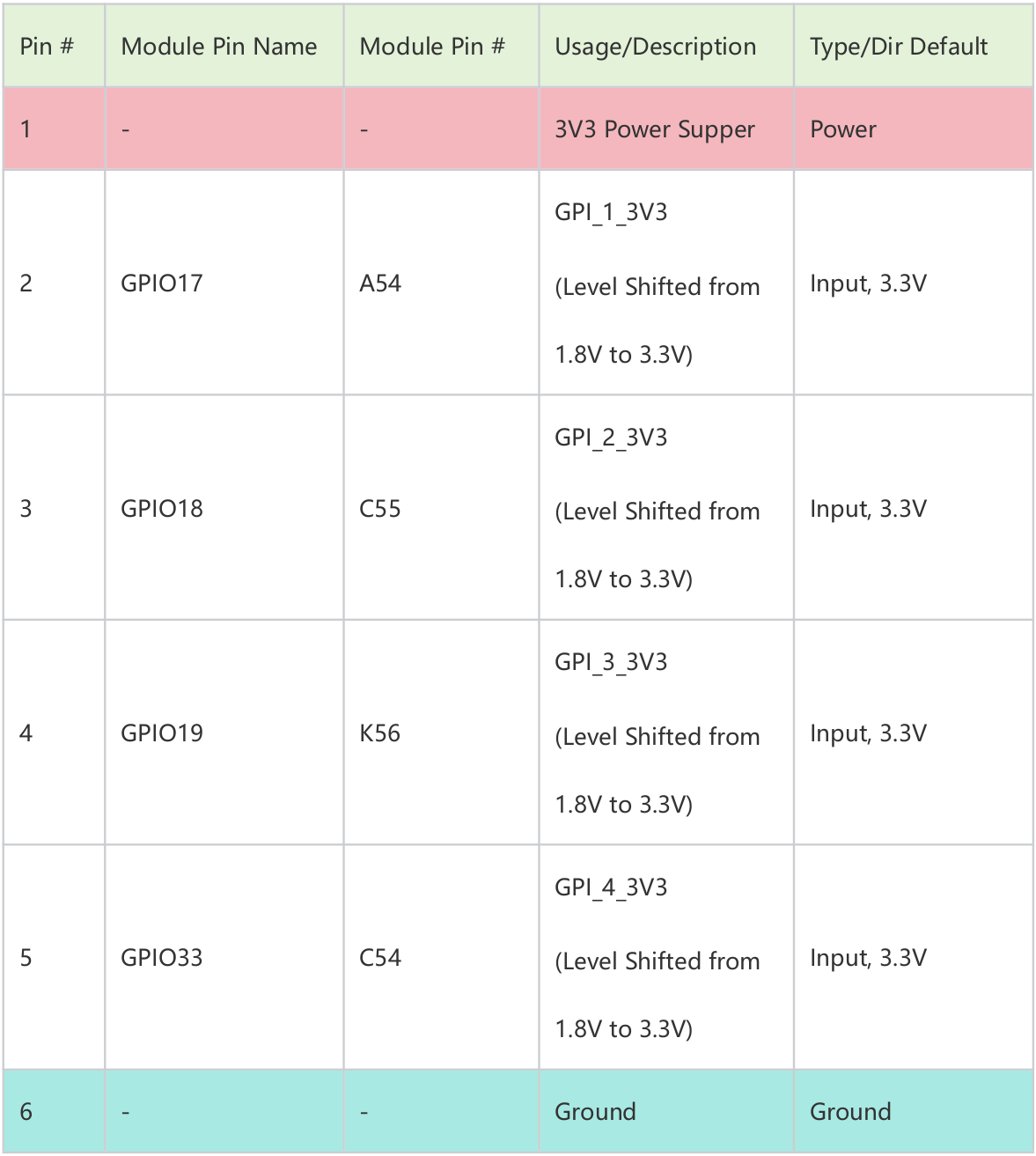
入力状態を読み取るために GPI 1 から GPI 4 を有効にします:
sudo gpioset --mode=wait 0 131=0
GPI 1 から GPI 4 の入力を読み取るには、次のコマンドを参照してください:
sudo gpioget 0 96 #read the input of GPI 1
sudo gpioget 0 104 #read the input of GPI 2
sudo gpioget 0 86 #read the input of GPI 3
sudo gpioget 0 83 #read the input of GPI 4
High レベルを読み取ると 1 を返し、Low レベルを読み取ると 0 を返します。
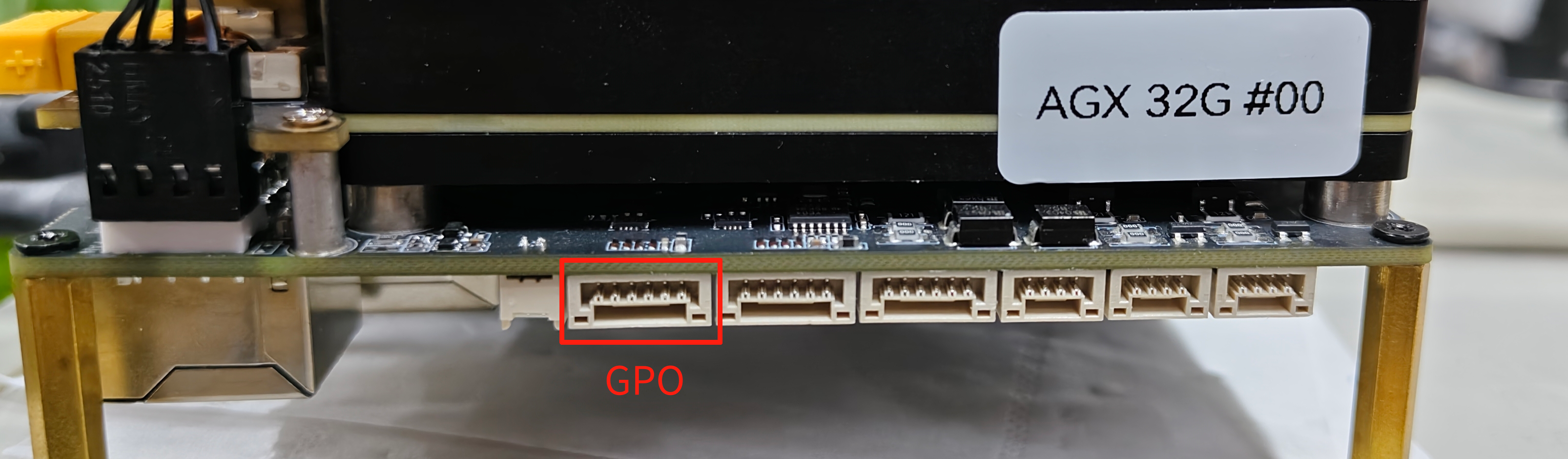
GPO
Robotics J501 Mini は、GPO 用に標準的な 6 ピン JST ヘッダを提供します。
GPO のデータシート回路図は次のとおりです:
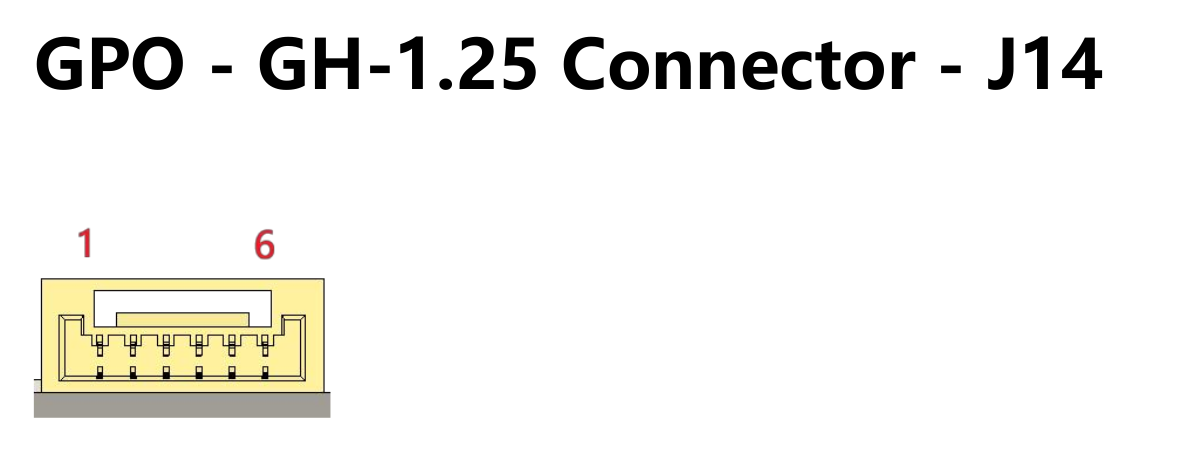
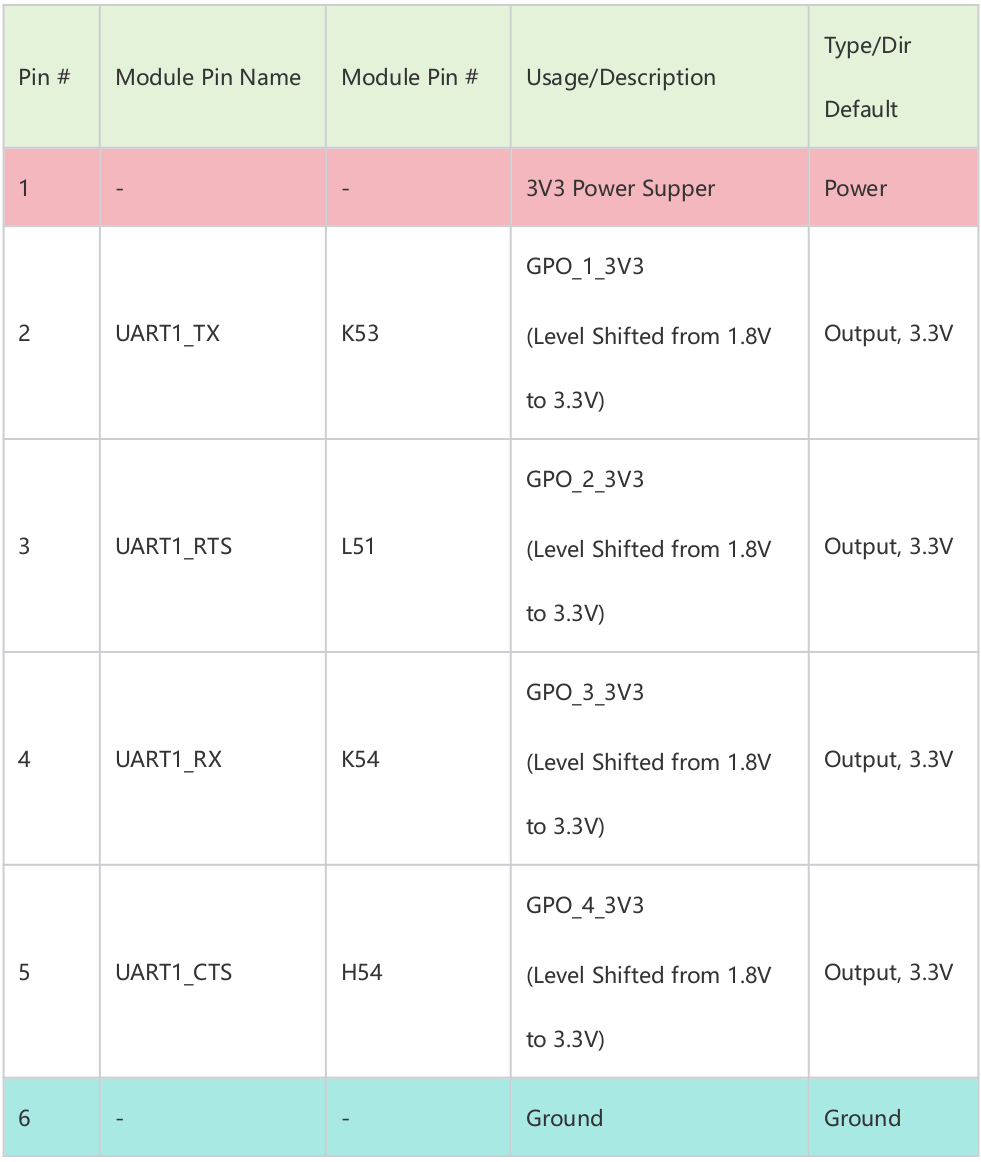
J14 のピン定義は次のとおりです:
出力状態のために GPO 1 から GPO 4 を有効にします:
sudo gpioset --mode=wait 0 79=1
GPO 1 から GPO 4 の出力を設定するには、次のコマンドを参照してください:
sudo gpioset --mode=wait 0 110=1 #set output of GPO 1 to high voltag
sudo gpioset --mode=wait 0 112=1 #set output of GPO 2 to high voltag
sudo gpioset --mode=wait 0 111=1 #set output of GPO 3 to high voltag
sudo gpioset --mode=wait 0 113=1 #set output of GPO 4 to high voltag
sudo gpioset --mode=wait 0 110=1 #set output of GPO 1 to low voltag
sudo gpioset --mode=wait 0 112=1 #set output of GPO 2 to low voltag
sudo gpioset --mode=wait 0 111=1 #set output of GPO 3 to low voltag
sudo gpioset --mode=wait 0 113=1 #set output of GPO 4 to low voltag
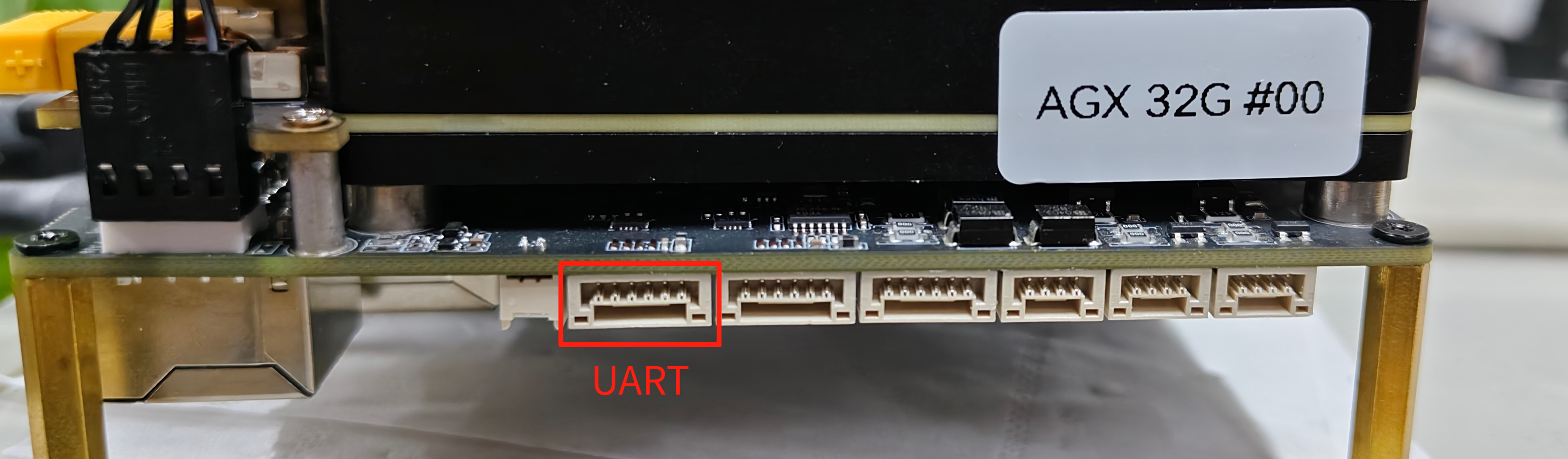
UART
Robotics J501 Mini は、UART シリアル通信のために標準的な 6 ピン JST ヘッダを提供します。 UART と GPO は同じ JST インターフェースを使用します。このインターフェースはデフォルトで GPO 機能になっています。UART 機能に切り替える必要がある場合は、新しいデバイスツリーを指定し、変更を有効にするためにデバイスを再起動する必要があります。
UART 通信を行うには、次の配線に従ってください。ここでは例として USB to TTL ツールを使用します。
UART のデータシート回路図は次のとおりです:
J14 のピン定義は次のとおりです:
UART と GPO は同じ物理インターフェースを共有しています。デフォルトでは、このインターフェースは GPO として機能します。UART に切り替える必要がある場合は、このセクションの内容を参照してください。
モジュールごとに、対応するデバイスツリーファイルをダウンロードする必要があります。
AGX Orin 32G 用 .dtb ダウンロードリンク:
https://files.seeedstudio.com/wiki/recomputer-j501-mini/tegra234-j501x-0000%2Bp3701-0004-recomputer-mini.dtb
AGX Orin 64G 用 .dtb ダウンロードリンク:
https://files.seeedstudio.com/wiki/recomputer-j501-mini/tegra234-j501x-0000%2Bp3701-0005-recomputer-mini.dtb
デバイスツリーを指定されたパスにコピーします:
# AGX Orin 32G
sudo cp tegra234-j501x-0000%2Bp3701-0004-recomputer-mini.dtb /boot/
# AGX Orin 64G
sudo cp tegra234-j501x-0000%2Bp3701-0005-recomputer-mini.dtb /boot/
/boot/extlinux/extlinux.conf をバックアップして編集し、新しい .dtb ファイルを指す行を追加します:
sudo cp /boot/extlinux/extlinux.conf /boot/extlinux/extlinux.conf.bak
sudo vim /boot/extlinux/extlinux.conf
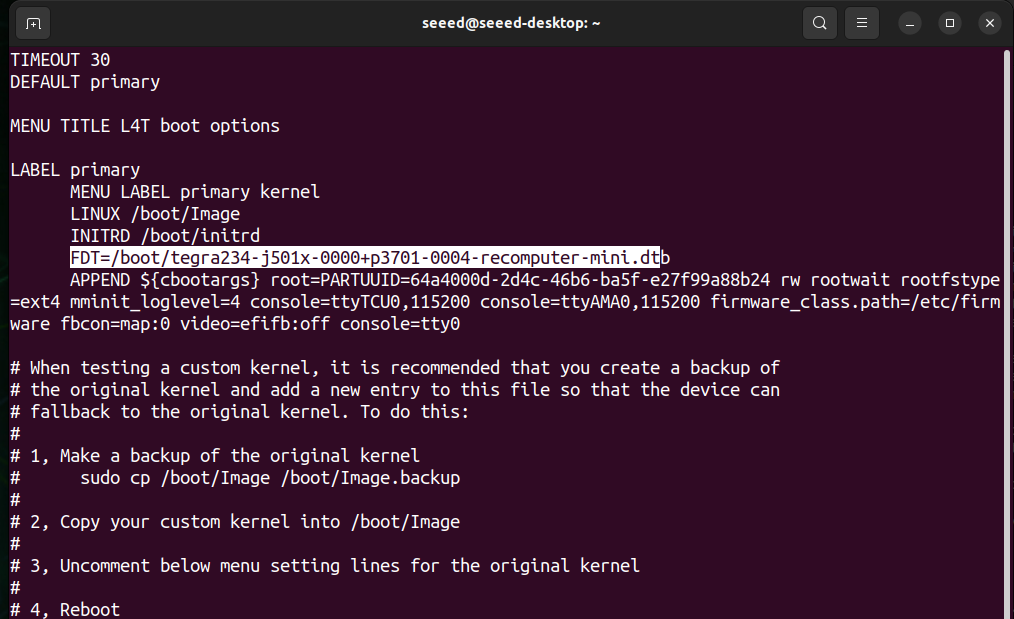
使用しているデバイスツリーファイル名に基づいて、extlinux.conf に FDT=/your_path の行を追加します。AGX Orin 32G を例にすると次のようになります:
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
FDT=/boot/tegra234-j501x-0000+p3701-0004-recomputer-mini.dtb
6ピンのJSTヘッダ UART は、Jetson 上では /dev/ttyTHS1 にマッピングされています。minicom を使用してシリアルポートのデータ送受信を確認できます:
sudo apt install minicom
sudo minicom -D /dev/ttyTHS1
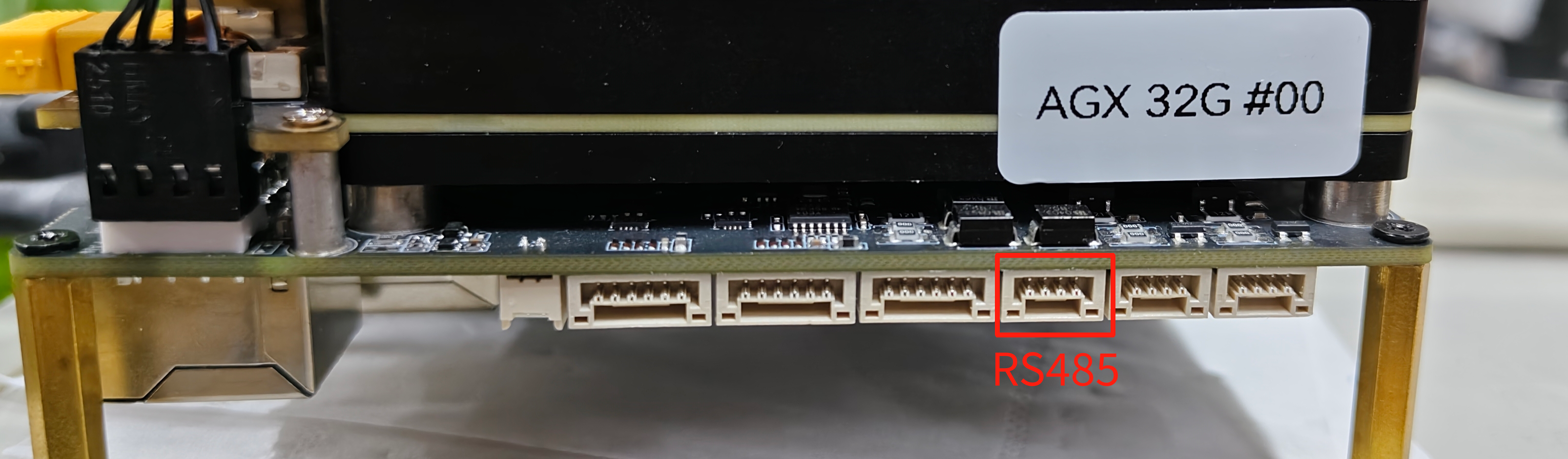
RS485
RS485 インターフェースは、産業環境で一般的に使用される、堅牢でノイズ耐性の高い差動通信チャネルを提供します。長距離かつマルチドロップのシリアル通信をサポートし、センサー、モータードライバ、PLC などの産業用デバイスを接続するのに最適です。
ハードウェア接続
Robotics J501-Mini は RS485 用に JST 4ピン(GH 1.25)ヘッダを提供します。
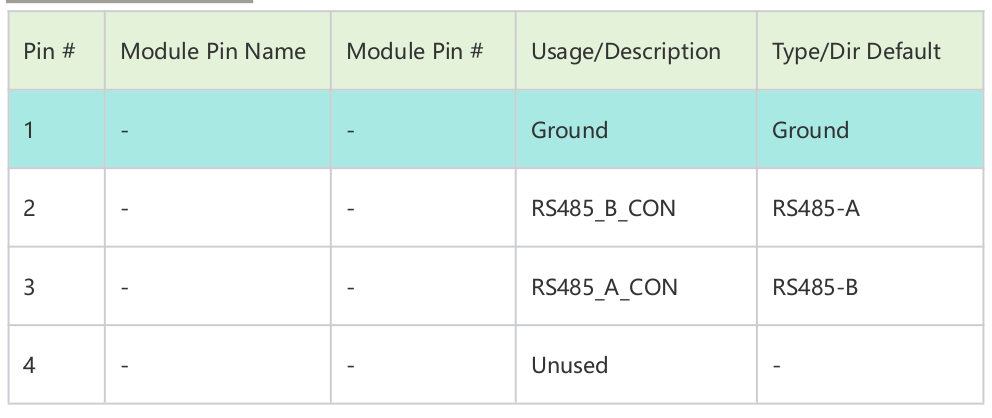
RS485 のデータシート回路図は次のとおりです:
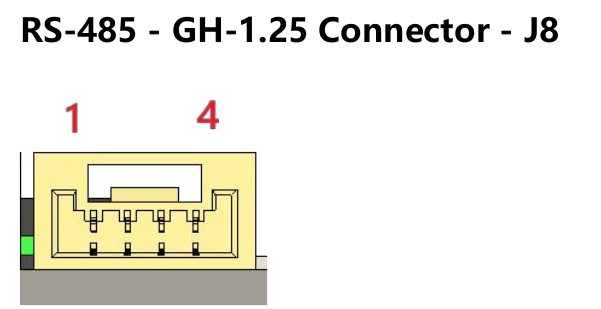
J8 のピン定義は次のとおりです:
使用手順
RS485 インターフェースを有効にするには、次のコマンドを参照してください:
sudo gpioset --mode=wait 1 9=0 # Enable 120R resistance
sudo gpioset --mode=wait 0 126=0 # Enable RS485
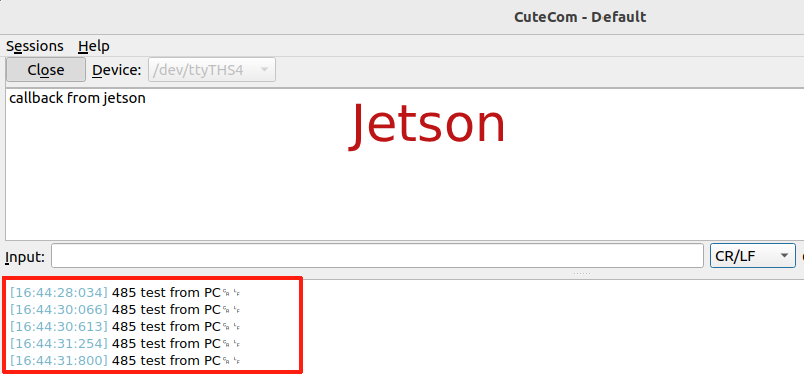
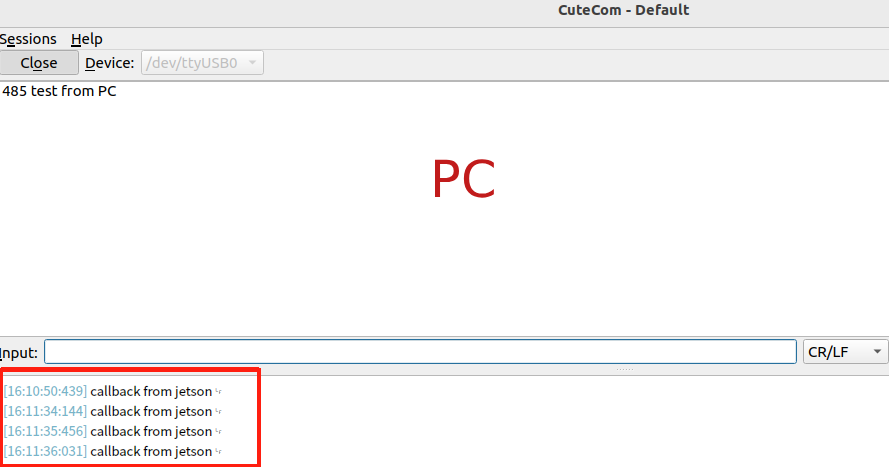
RS485 インターフェースは Jetson 上では /dev/ttyTHS4 にマッピングされています。cutecom を使用して、PC とシリアルデータの送受信テストを行うことができます:
sudo apt install cutecom
sudo cutecom
/dev/ttyTHS4 を選択し、Jetson と PC の両方をボーレート 9600 に設定し、RS485-USB 変換モジュールを介して Jetson と PC を接続します。
シリアルデータの送受信の様子は、次の図のように確認できます:
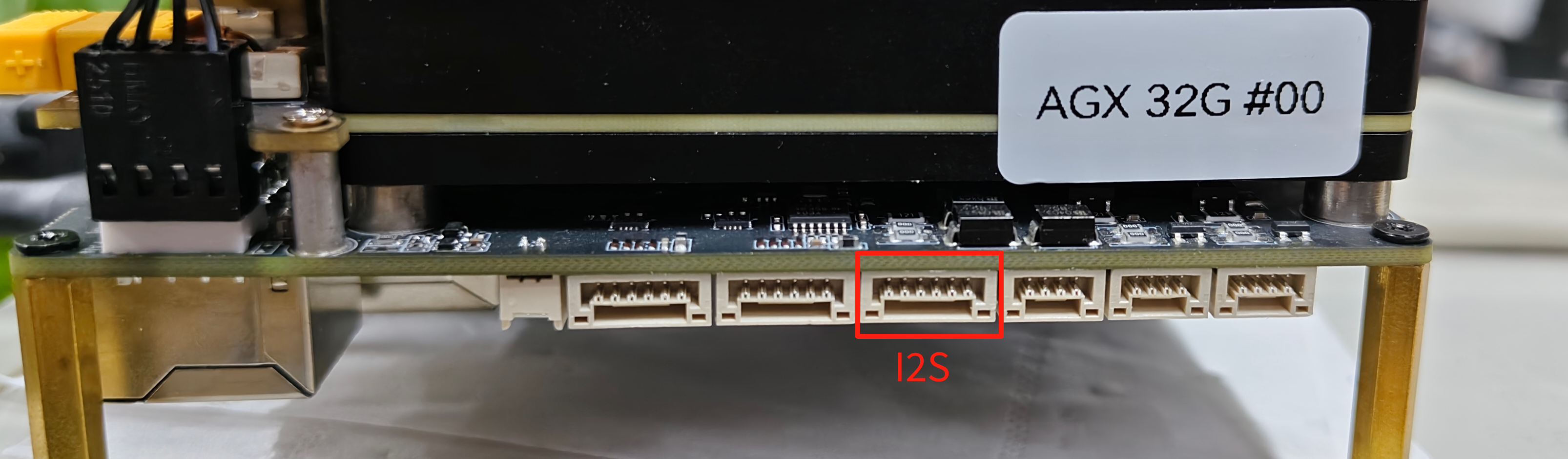
I2S
I2S インターフェースは、デバイス間でステレオオーディオデータを送信するために設計されたデジタルオーディオ通信バスを提供します。Robotics J501-Mini は標準的な I2S 信号をサポートしており、音声対話、音源定位、リアルタイム音声処理などのアプリケーション向けに、高品質かつ低レイテンシなオーディオ入出力を実現します。
ハードウェア接続
Robotics J501-Mini は I2S 用に 1x JST 5ピンコネクタ(GH 1.25)を提供します。
I2S のデータシート回路図は次のとおりです:
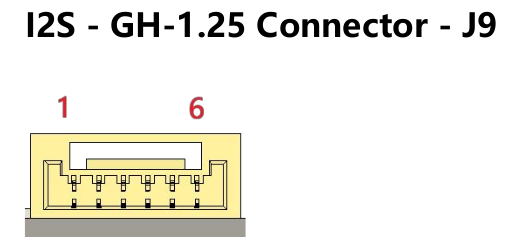
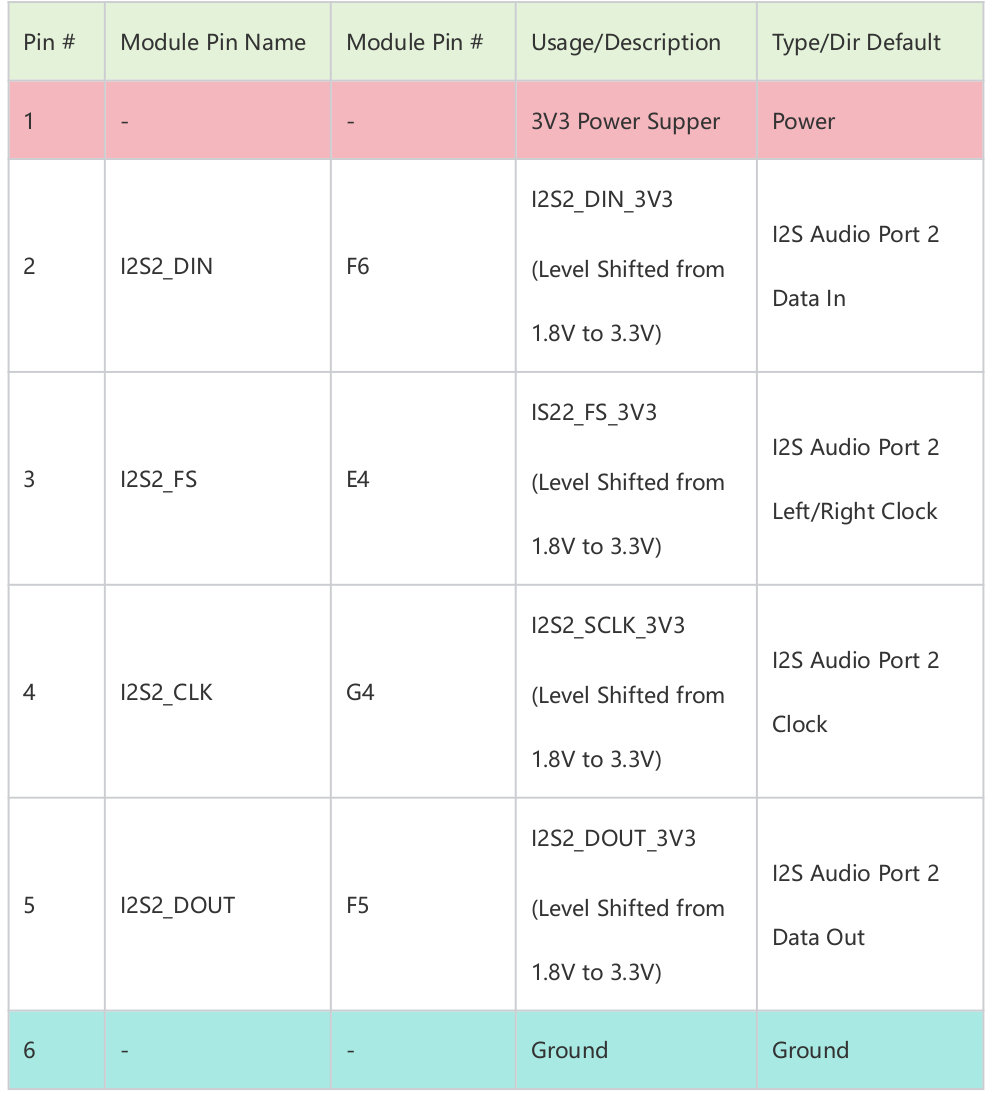
J9 のピン定義は次のとおりです:
使用手順
I2S を有効にするには、jetson-io.py で設定を行う必要があります。ターミナルで次のコマンドを実行します:
sudo python /opt/nvidia/jetson-io/jetson-io.py
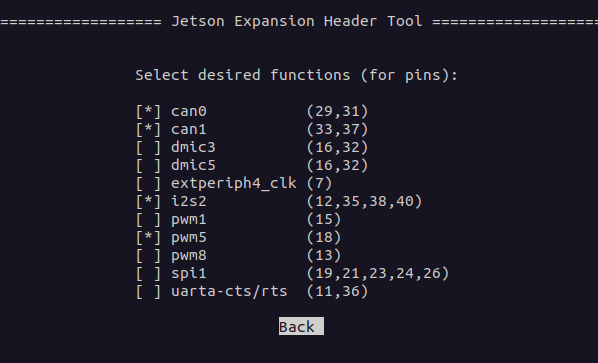
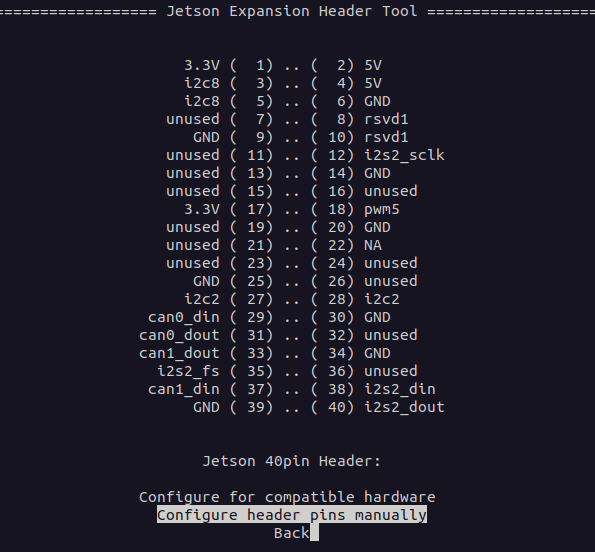
その後、以下の4つのステップに従って I2S インターフェースを有効にします:
- step1: Jetson 40-pin header オプションを選択します
- step2: Configure header pins manually を選択します
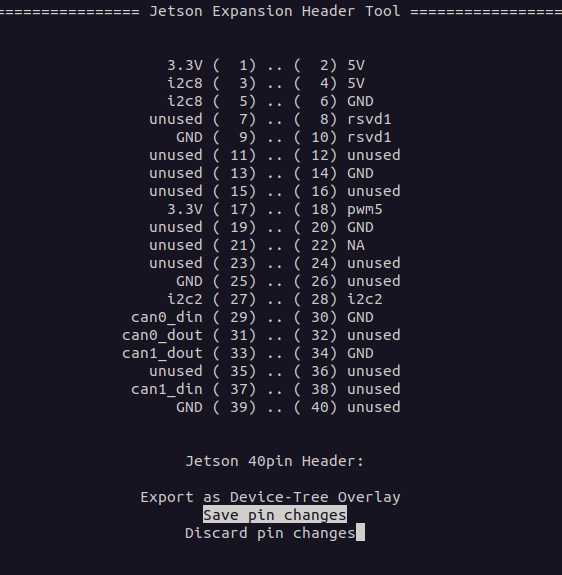
- step3:
i2s2を選択します。選択後は[*]でマークされます - step4: 設定を保存し、Jetson を再起動します

I2S を有効にした後、このセクションでは I2S を使用して 2 チャンネルスピーカーを駆動する方法を説明します。まず、ターミナルで次のコマンドを入力します:
amixer -c APE cset name="I2S2 Mux" "ADMAIF1" # Speaker
マイクを使用する場合:
amixer -c APE cset name="ADMAIF2 Mux" "I2S2" # Microphone
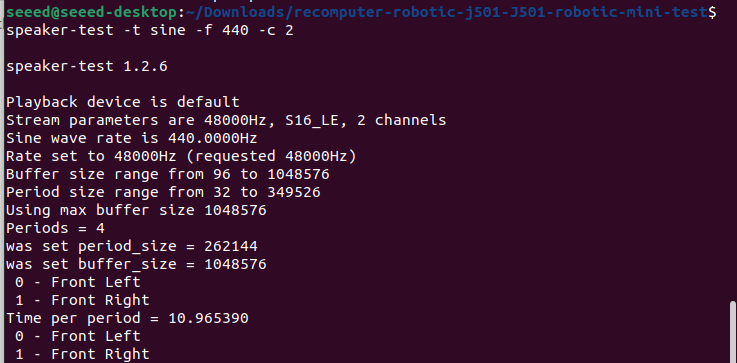
以下のコマンドを参照してスピーカーを駆動します。ここで、-c は使用しているスピーカーチャンネル数に変更してください:
speaker-test -t sine -f 440 -c 2
スピーカーが正常に駆動されている場合、次の図のようにターミナルに出力が表示されます。
RTC
Robotics J501-Mini は RTC(3V)用に標準的な 2ピンヘッダを提供します。
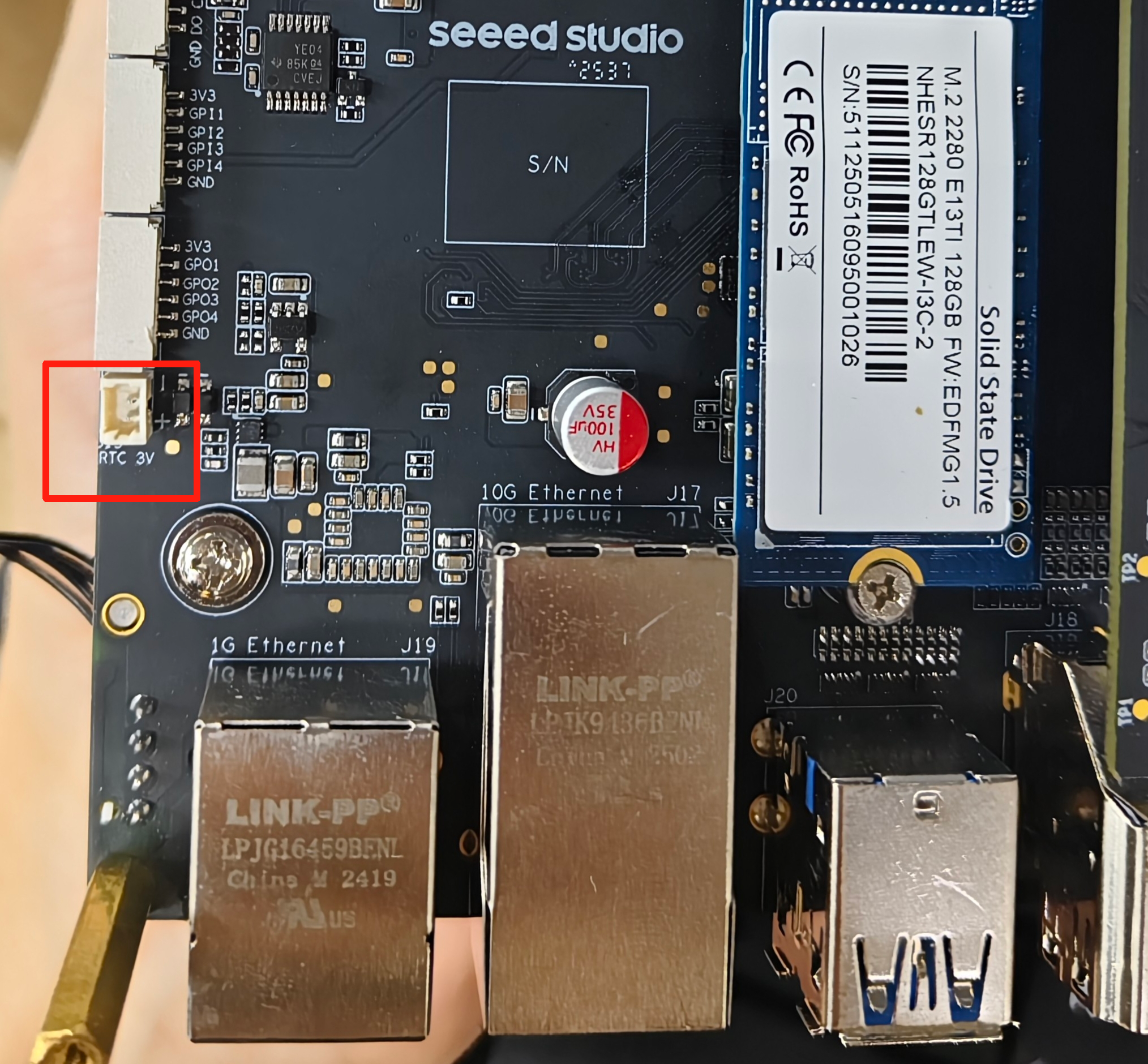
RTC のデータシート回路図は次のとおりです:
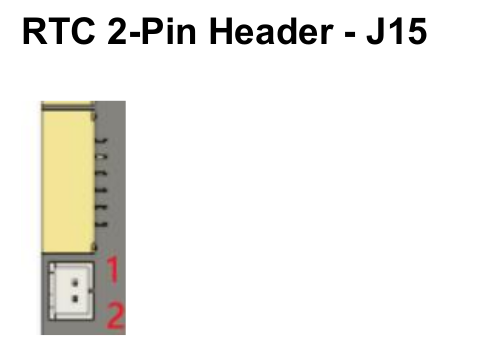
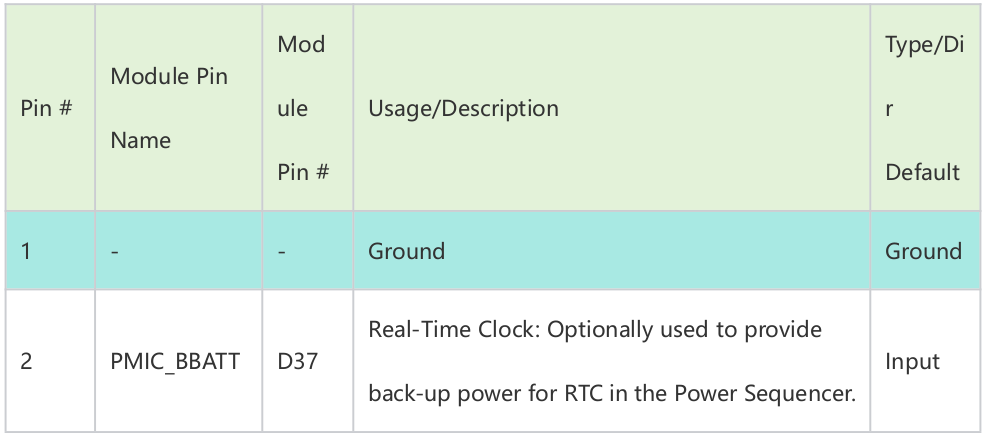
J15 のピン定義は次のとおりです:
外部バッテリーを接続した後、ターミナルで rtc0(メイン RTC、オンボードバッテリーに対応)の動作状態を確認できます:
cat /sys/class/rtc/rtc0/power/runtime_status
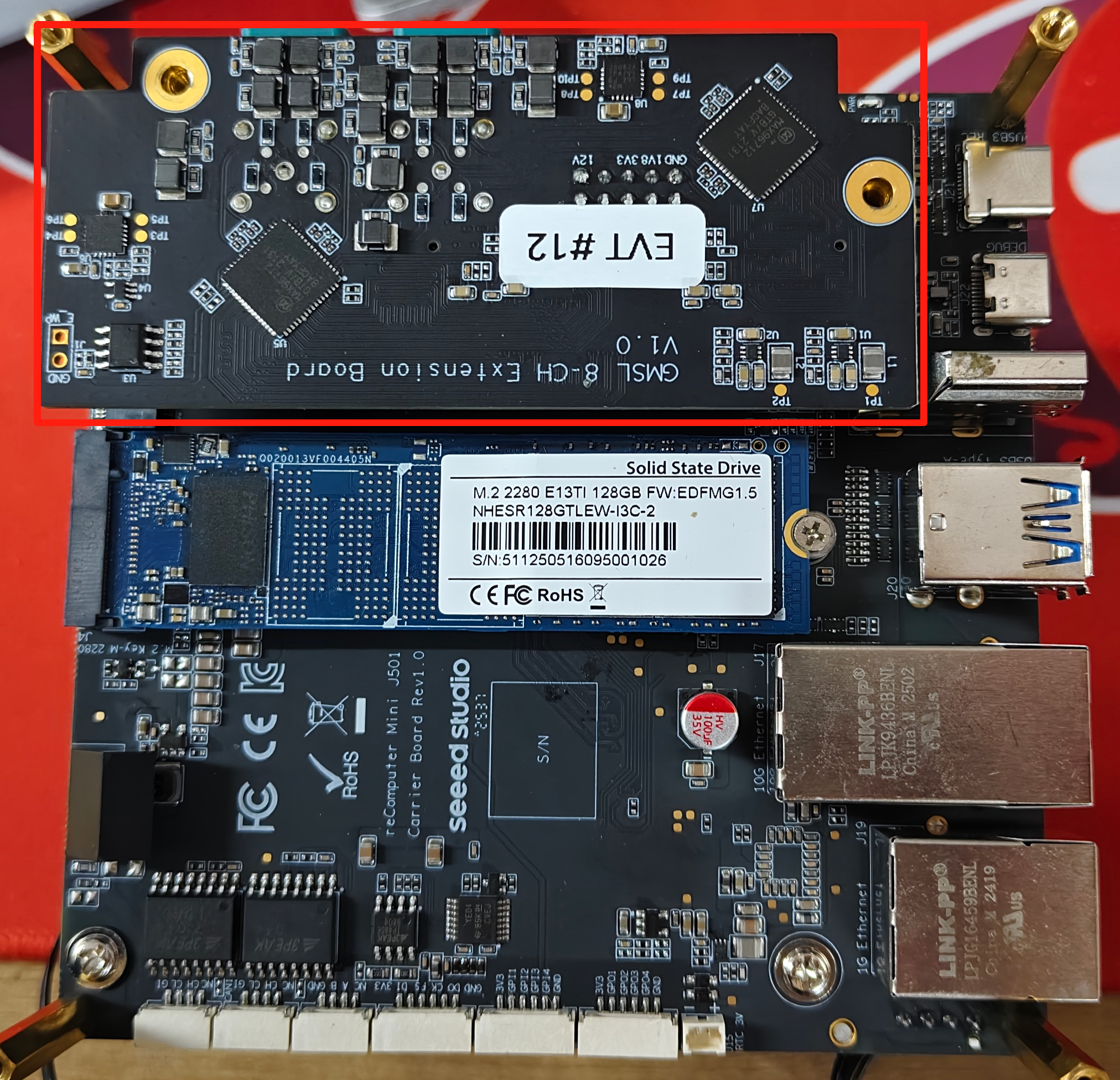
拡張ポート - GMSL
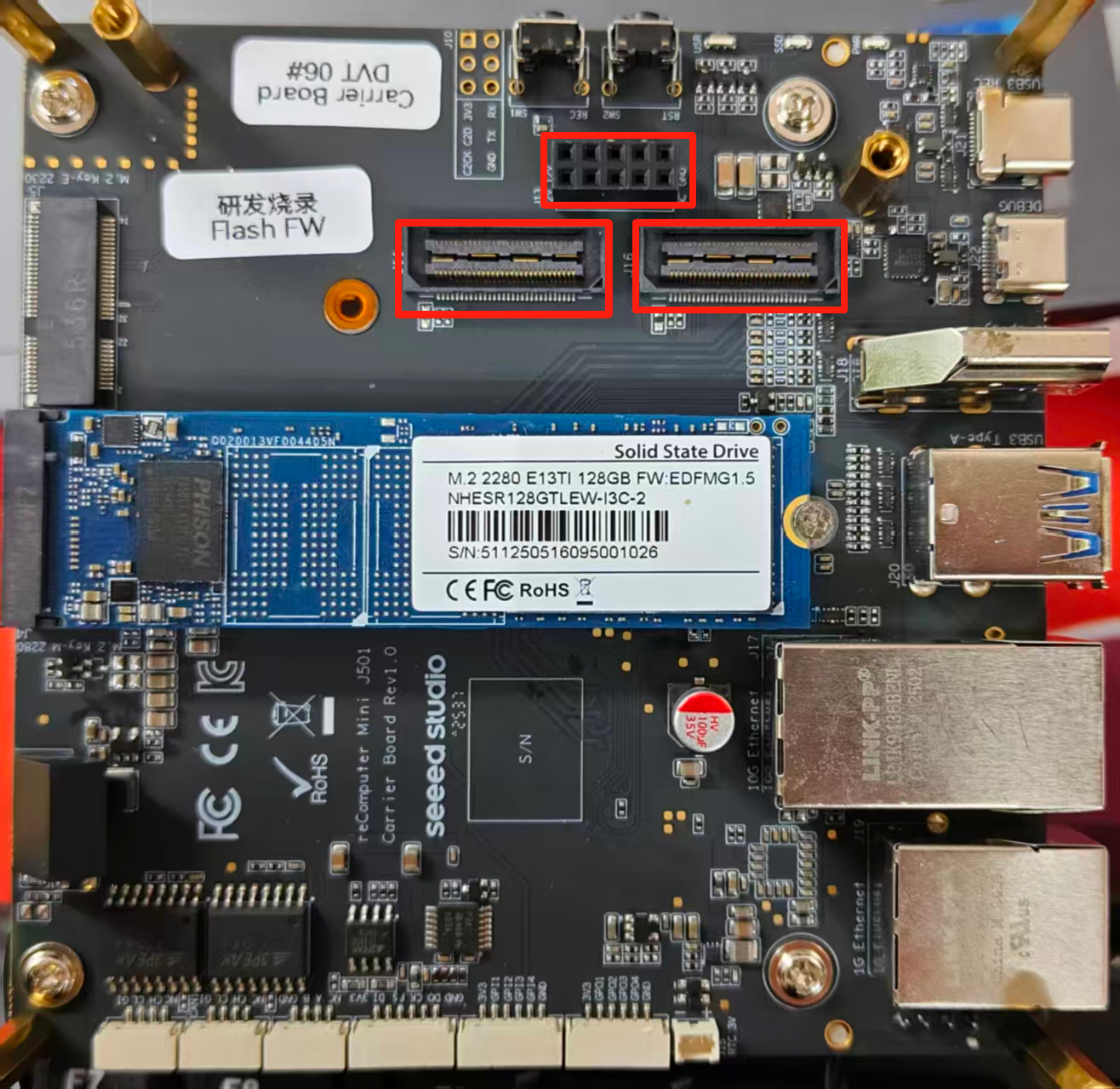
Robotics j501-Mini キャリアボードには、GMSL 拡張ボード用のカメラ拡張ヘッダが搭載されています。これにより、4台の GMSL カメラを同時に接続して動作させることができます。
ハードウェア接続
以下は、Robotics j501-Mini キャリアボードの GMSL カメラ拡張ボード接続スロットです(事前に拡張ボードを用意しておく必要があります):
以下は、すでにサポートしている GMSL カメラモデルです:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
使用手順
GMSL 機能を有効にする前に、GMSL 拡張ボードドライバを含む JetPack バージョンをインストールしていることを確認してください。
Jetson IO ファイルの設定
sudo /opt/nvidia/jetson-io/jetson-io.py
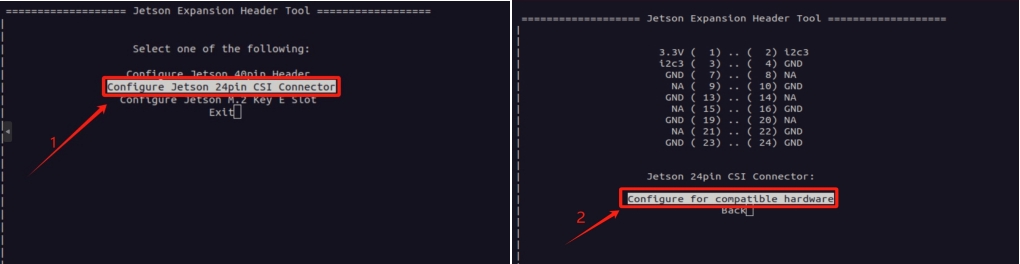
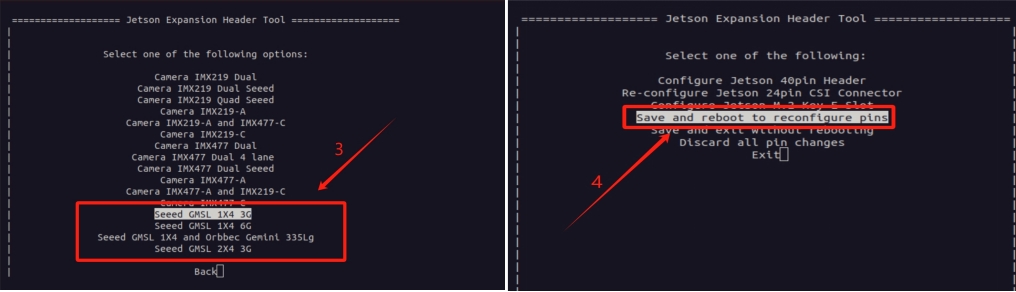
オーバーレイファイルは全部で 3 つあり、それぞれ Seeed GMSL 1X4 3G、Seeed GMSL 1X4 6G、Seeed GMSL 1X4、および Orbbec Gemini 335Lg です。これらはそれぞれ、SG3S の 3G カメラ、SG2 および SG8S の 6G カメラ、そして Orbbec のカメラに対応しています。図3に示すように、使用するカメラのモデルに応じて io ファイルを設定してください。
step 2. ビデオインターフェース設定ツールをインストールします。
sudo apt update
sudo apt install v4l-utils
SGxxx シリーズのカメラを使用する
step 1. シリアライザおよびデシリアライザのチャネルフォーマットを設定します。図中のインターフェース番号はシリアライザ/デシリアライザ番号に対応しています。
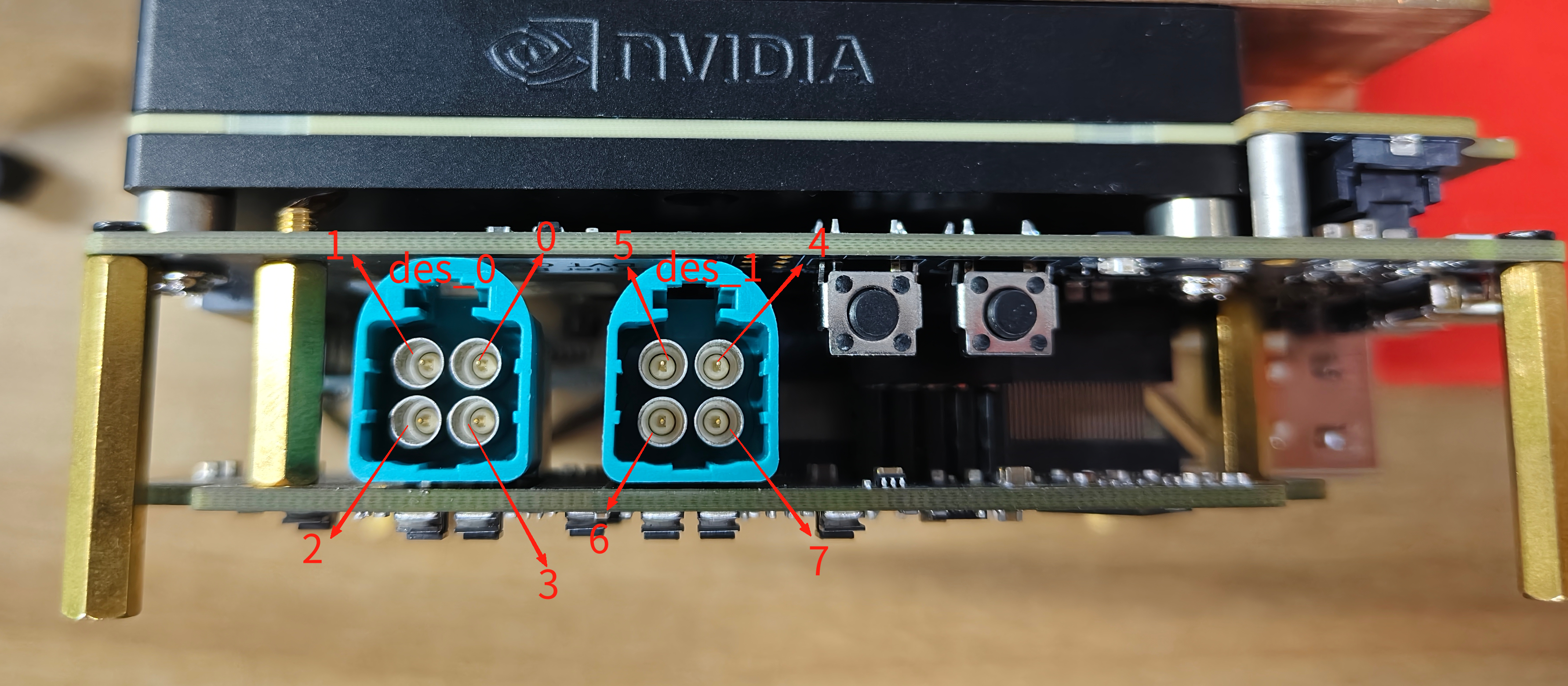
media-ctl -d /dev/media0 --set-v4l2 '"ser_0_ch_0":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_0":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_1_ch_1":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_1":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_2_ch_2":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_2":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_3_ch_3":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_3":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_4_ch_0":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_0":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_5_ch_1":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_1":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_6_ch_2":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_2":0[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"ser_7_ch_3":1[fmt:YUYV8_1X16/1920x1536]'
media-ctl -d /dev/media0 --set-v4l2 '"des_1_ch_3":0[fmt:YUYV8_1X16/1920x1536]'
ser_0_ch_0 はデコーダの最初のチャネルであり、des_ch_0 は最初のカメラ上のシリアライザです。他についても同様です。接続されているカメラの解像度が異なる場合、ここでの設定はカメラの実際のフォーマットに基づきます。
デバイスが再起動するたびに、シリアライザとデシリアライザのチャネルフォーマットを設定する必要があります。
step 2. カメラの解像度を設定します。
ここでは、異なるモデルおよび解像度のカメラを設定する方法を説明します。
v4l2-ctl -V --set-fmt-video=width=1920,height=1080 -c sensor_mode=1 -d /dev/video0
v4l2-ctl -V --set-fmt-video=width=1920,height=1080 -c sensor_mode=1 -d /dev/video1
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video2
v4l2-ctl -V --set-fmt-video=width=3840,height=2160 -c sensor_mode=2 -d /dev/video3
--set-fmt-video は、接続されているカメラに基づいて選択された解像度に従います。sensor_mode もそれに応じて選択されます。現在、3 つの sensor_mode オプションがあり、それぞれが異なる解像度に対応しています。
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
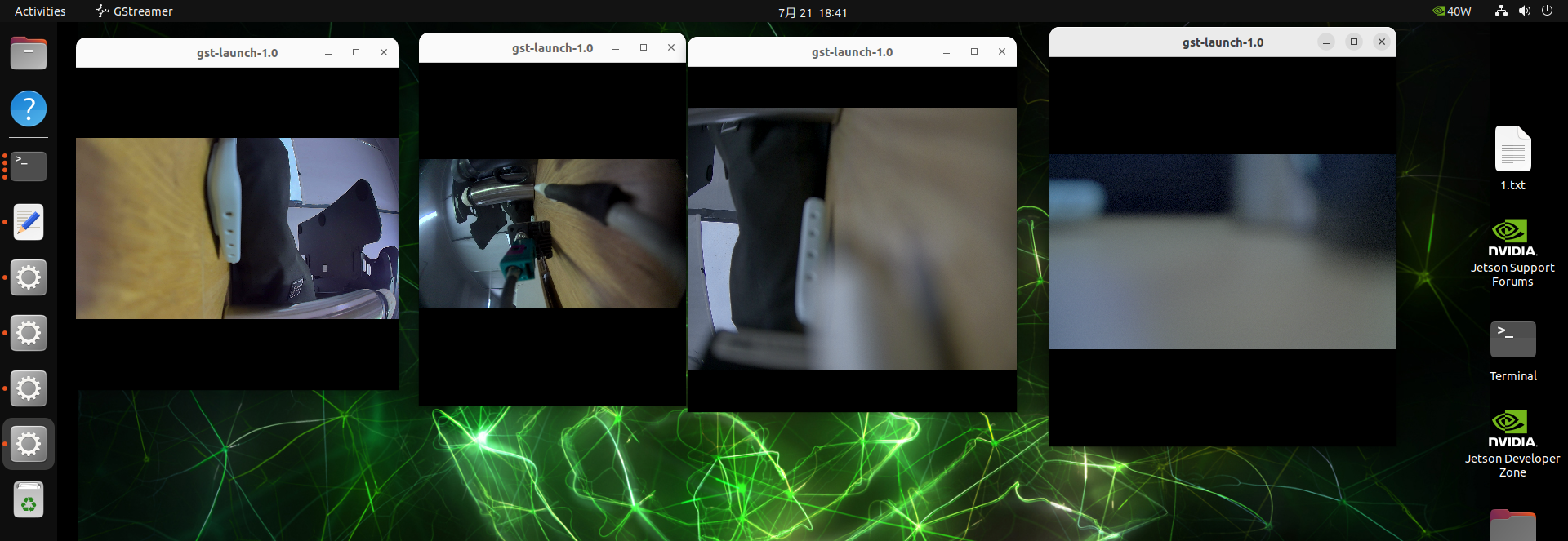
step 3. カメラを起動します。
gst-launch-1.0 v4l2src device=/dev/video0 ! \
'video/x-raw,width=1920,height=1080,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
gst-launch-1.0 v4l2src device=/dev/video1 ! \
'video/x-raw,width=1920,height=1080,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
gst-launch-1.0 v4l2src device=/dev/video2 ! \
'video/x-raw,width=1920,height=1536,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
gst-launch-1.0 v4l2src device=/dev/video3 ! \
'video/x-raw,width=3840,height=2160,framerate=30/1,format=UYVY' ! \
videoconvert ! autovideosink -ev
ディスプレイ
Robotics J501 Mini は、高解像度ディスプレイ出力用の HDMI を備えています。
リソース
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます。弊社は、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じて選択いただけるよう、複数のコミュニケーションチャネルを用意しています。