Robotics J601 キャリアボード ハードウェアインターフェースの使用方法
reComputer Robotics J601 は、NVIDIA Jetson AGX Thor モジュール向けに設計された高性能ロボット用キャリアボードで、高度なエンボディドAIおよびロボット制御アプリケーションをターゲットとしています。4x 10GbE Ethernet、5Gおよび Wi-Fi/BT モジュール用の M.2 スロット、USB 3.2 ポート、4x CAN(CAN FD 対応)、RS-232/422/485、I2C、I2S、UART、GPIO(GPI/GPO)、GMSL2 拡張(最大8台のカメラ)、ワイドレンジDC入力など、豊富な接続オプションを備えており、さまざまなセンサーからの複雑なデータを処理できる強力なロボットブレインとして機能します。
NVIDIA Isaac ROS、Hugging Face、PyTorch、ROS 2/1 などのフレームワークをサポートする reComputer Robotics J601 は、大規模言語モデルによる意思決定と、モーションプランニングやセンサーフュージョンといった物理ロボット制御との橋渡しを行います。自律ロボットの迅速な開発に最適で、すぐに使えるインターフェースと最適化されたAIフレームワークにより、製品化までの時間を短縮します。

USB
Robotics J601 キャリアボードには複数の USB ポートが搭載されており、高速な周辺機器接続用に 4x USB 3.2 Type-A ポート(ホスト、10Gbps)、リカバリ/フラッシュ用に 1x USB 3.2 Type-C ポート(J4)、デバイスモード/デバッグ用に 1x USB 2.0 Type-C ポート(J3)が用意されています。
USB 3.2 スピードテスト
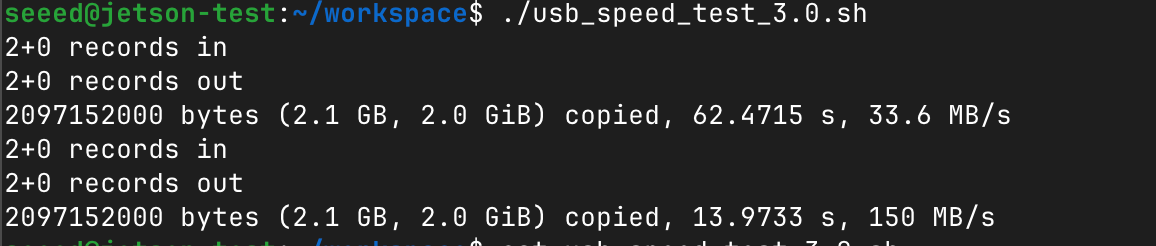
USB 3.0 フラッシュドライブを挿入し、その読み書き速度をテストします。実際の速度は USB ドライブ自体の性能に依存することに注意してください。
テスト用スクリプトを作成します:
vim test_usb_speed.sh
次の内容を貼り付けます:
#!/bin/bash
echo "seeed" | sudo -S dd if=/dev/zero of=/dev/sda bs=1000M count=2 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
echo "seeed" | sudo -S dd if=/dev/sda of=/dev/null bs=1000M count=2
/dev/sda を実際の USB ドライブのデバイス名に置き換えてください。lsblk を使用して確認できます。
スクリプトに実行権限を与えて実行します:
chmod +x test_usb_speed.sh
./test_usb_speed.sh
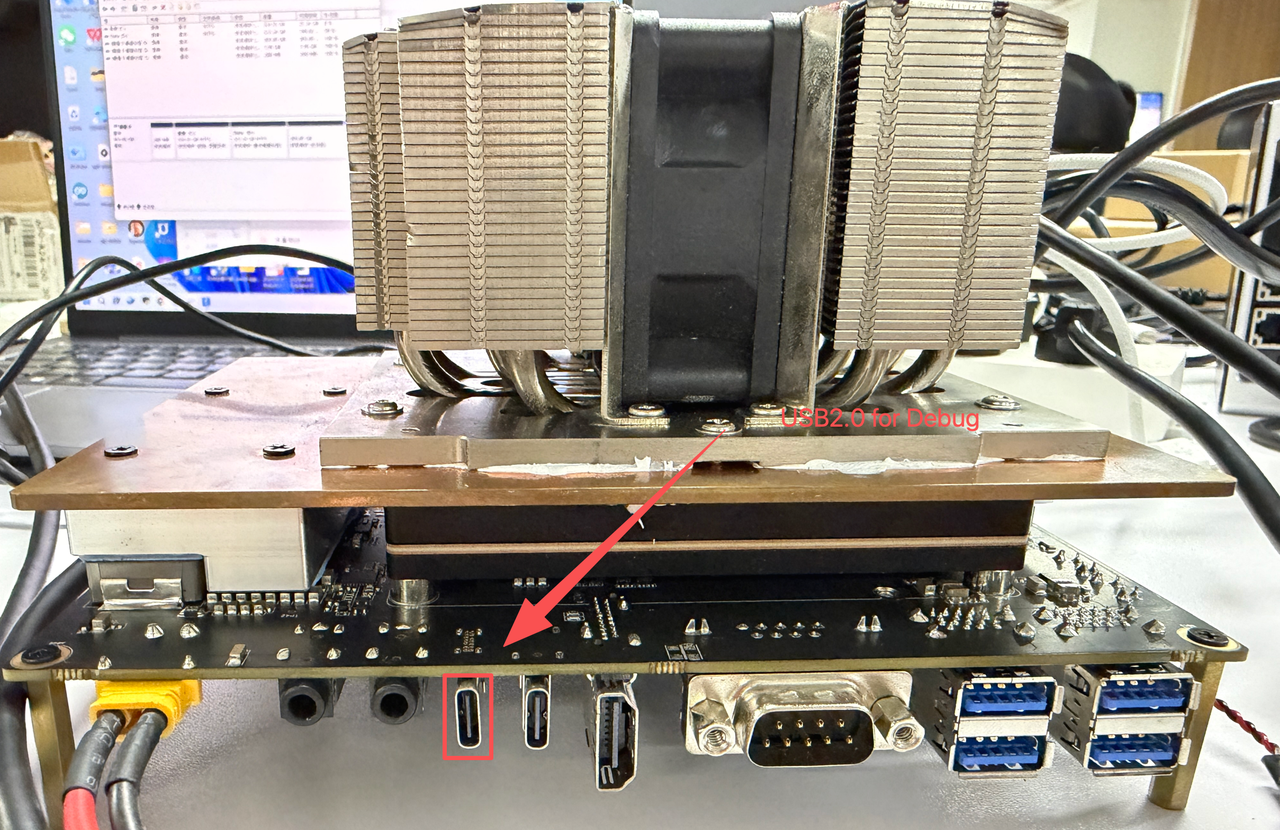
USB 2.0 Type-C デバッグポート
このシリアルポートを USB-C データケーブル経由で使用することで、PC 側で入出力のデバッグ情報をモニタリングできます。
Windows
Step 1. USB-C データケーブルで J601 を PC に接続します。
Step2. PC に CP210X Driver をダウンロードします。

Step3. PC を USB データケーブルで接続し、ダウンロードしたファイルを解凍して PC にドライバをインストールします。

Step4. Windows PC でデバイスマネージャーを開き、reComputer J601 に割り当てられた COM ポート番号を確認します。"Ports (COM & LPT)" の下に "Silicon Labs CP210x USB to UART Bridge (COMX)" と表示され、X が COM ポート番号になります。

Step5. シリアルポートツールを開きます(ここでは例として MobaXterm ツールを使用)、新しいセッションを作成します。

Step6. Serial ツールを選択します。

Step7. 対応するシリアルポートを選択し、ボーレートを 115200 に設定して "OK" をクリックします。

Step8. ユーザー名とパスワードを使用して reComputer J601 にログインします。

Linux
Step 1. USB-C データケーブルで J601 を Linux PC に接続します。
Step 2. シリアルデバイスを探します:
ls /dev/ttyUSB*

Step 3. シリアルコンソールに接続します:
screen /dev/ttyUSB0 -b 115200
これで J601 のシリアルコンソール出力が表示され、ユーザー名とパスワードでログインできるようになります。
GMSL
Robotics J601 には GMSL カメラ拡張ヘッダが搭載されており、最大 8 台の GMSL カメラ を同時にサポートし、マルチカメラのロボットビジョンアプリケーションを実現できます。
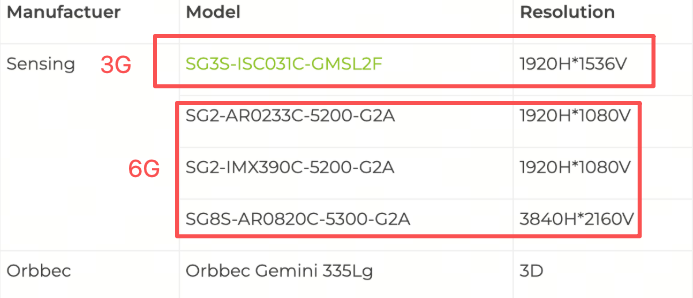
対応 GMSL カメラモデル
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
- Orbbec Gemini 335Lg
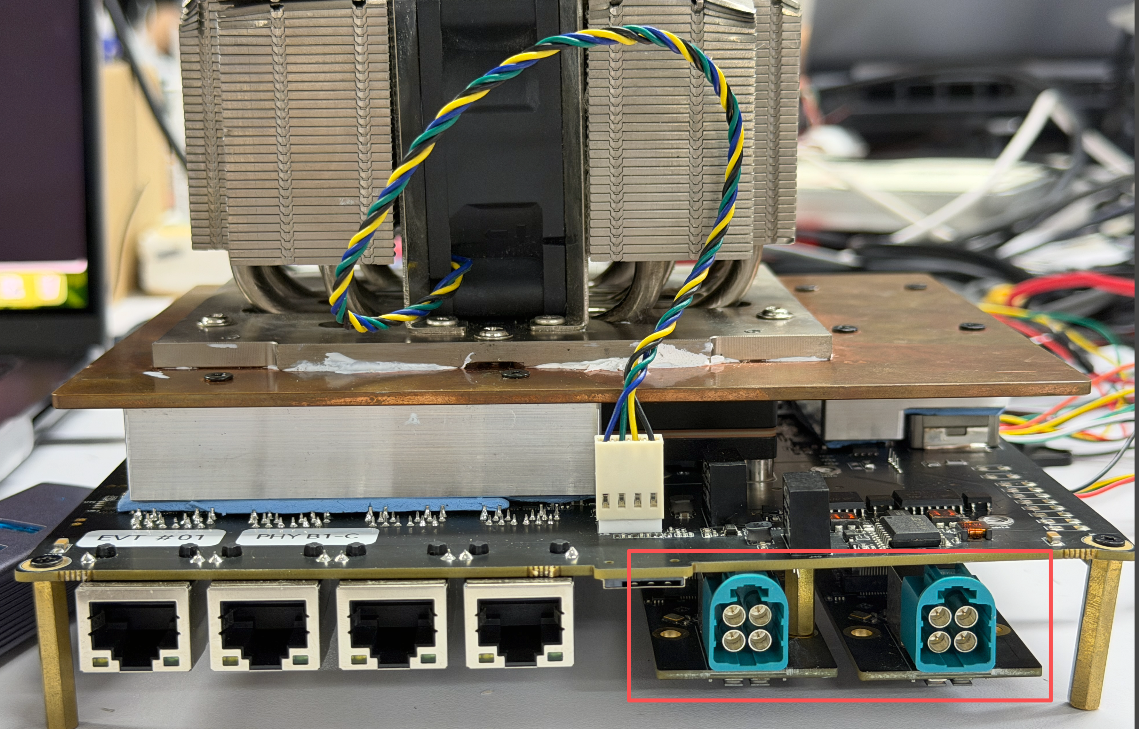
ハードウェア接続
GMSL 拡張ボードを J601 キャリアボード上のカメラ拡張ヘッダに接続し、その後 GMSL カメラを拡張ボードに接続します。
使用手順
GMSL 機能を有効にする前に、GMSL 拡張ボードドライバを含む JetPack バージョンをインストールしていることを確認してください。
Step 1. ビデオインターフェース設定ツールをインストールします:
sudo apt update
sudo apt install v4l-utils wmctrl
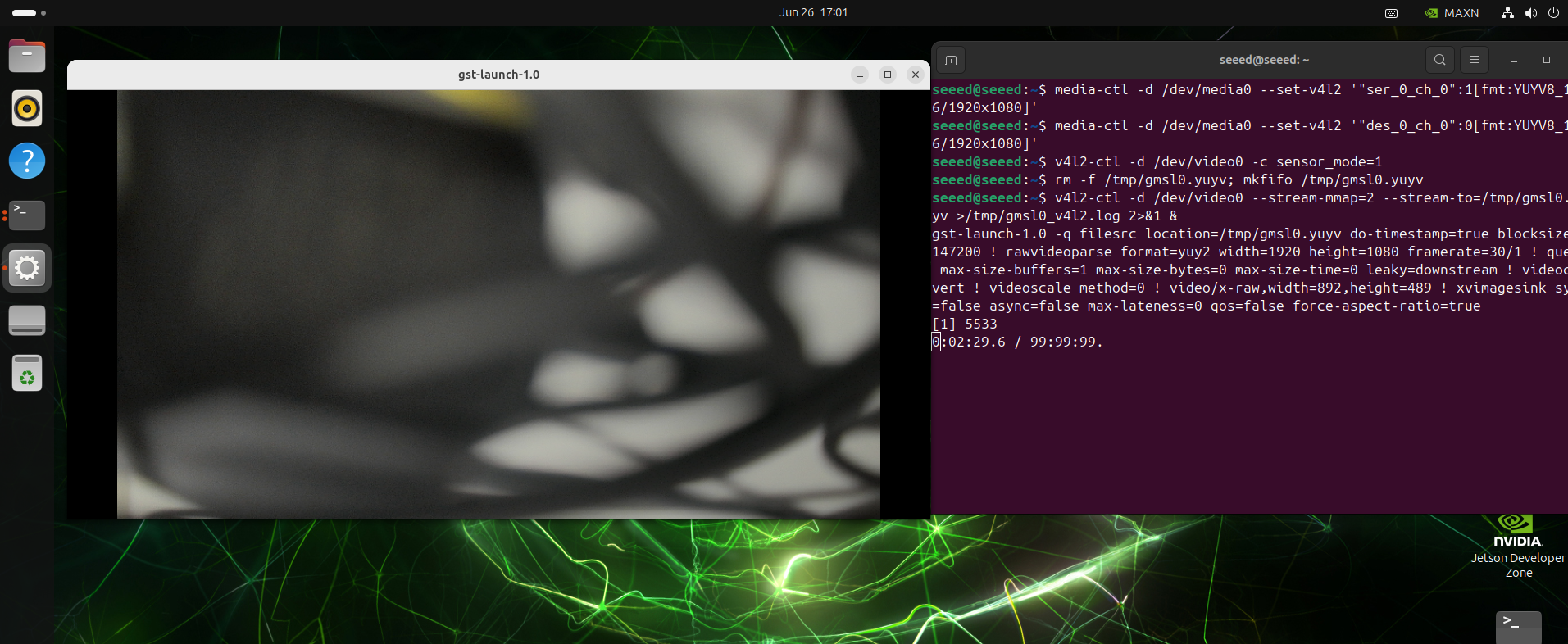
#example
media-ctl -d /dev/media0 --set-v4l2 '"ser_0_ch_0":1[fmt:YUYV8_1X16/1920x1080]'
media-ctl -d /dev/media0 --set-v4l2 '"des_0_ch_0":0[fmt:YUYV8_1X16/1920x1080]'
v4l2-ctl -d /dev/video0 -c sensor_mode=1
rm -f /tmp/gmsl0.yuyv; mkfifo /tmp/gmsl0.yuyv
v4l2-ctl -d /dev/video0 --stream-mmap=2 --stream-to=/tmp/gmsl0.yuyv >/tmp/gmsl0_v4l2.log 2>&1 &
gst-launch-1.0 -q filesrc location=/tmp/gmsl0.yuyv do-timestamp=true blocksize=4147200 ! rawvideoparse format=yuy2 width=1920 height=1080 framerate=30/1 ! queue max-size-buffers=1 max-size-bytes=0 max-size-time=0 leaky=downstream ! videoconvert ! videoscale method=0 ! video/x-raw,width=892,height=489 ! xvimagesink sync=false async=false max-lateness=0 qos=false force-aspect-ratio=true
Gemini 335Lg カメラの使用
# Download the Orbbec Gemini 335Lg visualization tool
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
# Unzip and run the UI tool
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
初回起動時には、ファームウェアの更新が必要になる場合があります。データストリームを開くと、カメラからの映像を確認できます。
UART
Robotics J601 は、外部デバイスとのシリアル通信のために標準 JST ヘッダ経由の UART インターフェースを提供します。UART ポートは Jetson システム上の /dev/ttyTHS1 に接続されており、デフォルトのボーレートは 115200 です。
ハードウェア接続
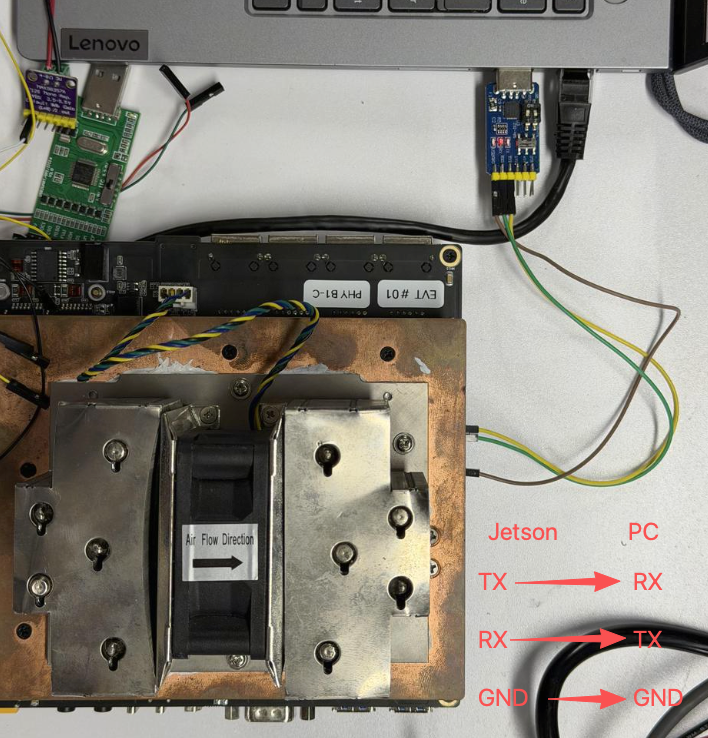
UART 通信を行うには、以下の配線に従って USB-to-TTL ツールを接続します:
- TX → RX
- RX → TX
- GND → GND
使用手順
USB-to-TTL ツールを Robotics J601 の UART ポートと PC に接続し、PC 側でシリアルポートツールを開いてボーレートを 115200 に設定します。
シリアル通信テストには、簡単な Python スクリプトを使用できます:
import serial
import time
ser = serial.Serial('/dev/ttyTHS1', 115200, timeout=1)
ser.write(b'Hello Jetson!\n')
while True:
if ser.in_waiting:
data = ser.readline()
print("get:", data.decode('utf-8').strip())
time.sleep(0.1)
ser.close()
Jetson デバイス上でスクリプトを実行します:
python3 uart_test.py
I2S
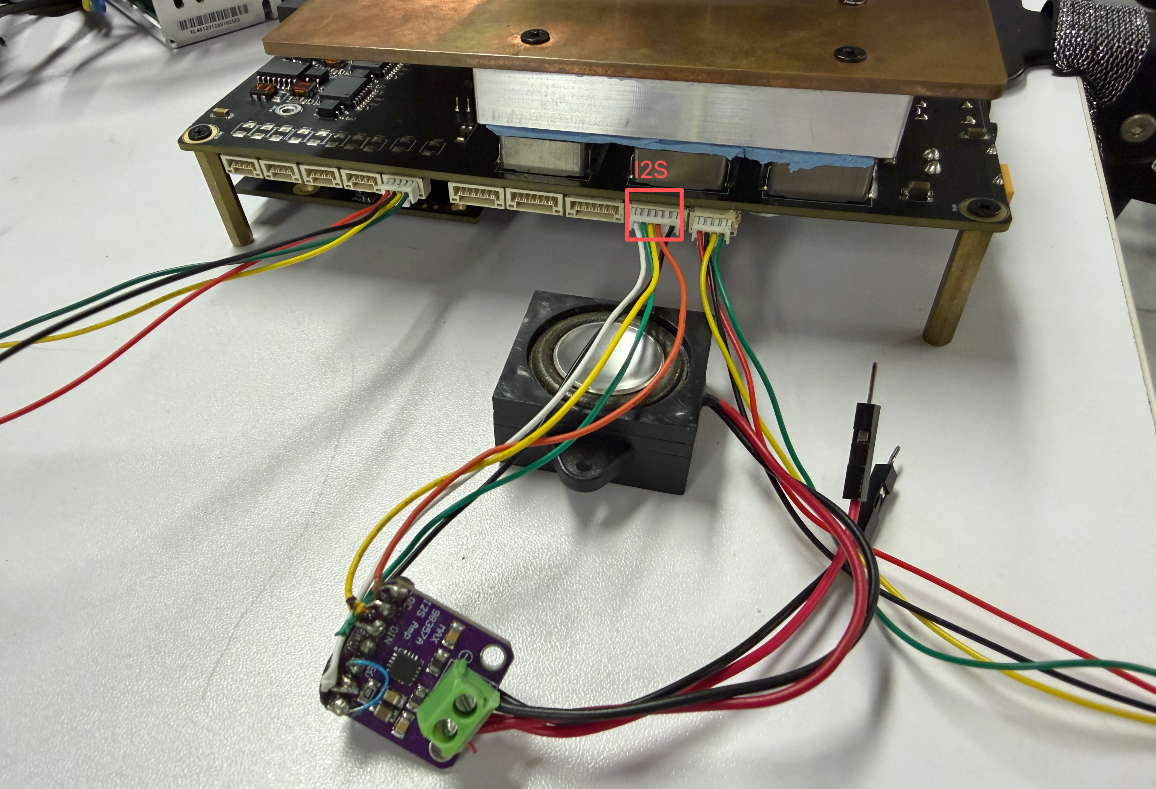
Robotics J601 は、オーディオ再生および録音用にアンプ出力とマイク入力を備えた I2S オーディオインターフェースを提供します。I2S インターフェースは J14 JST GH-1.25 コネクタから引き出されています。
ピン定義
| Pin # | モジュールピン名 | モジュールピン # | 用途/説明 | 種別/方向 |
|---|---|---|---|---|
| 1 | - | - | 3V3 電源 | Power |
| 2 | I2S2_DIN | F6 | I2S2 オーディオポート 2 データ入力(1.8V から 3.3V へレベルシフト) | Input |
| 3 | I2S2_FS | E4 | I2S2 オーディオポート 2 左右クロック(1.8V から 3.3V へレベルシフト) | Bidir |
| 4 | I2S2_CLK | G4 | I2S2 オーディオポート 2 クロック(1.8V から 3.3V へレベルシフト) | Bidir |
| 5 | I2S2_DOUT | F5 | I2S2 オーディオポート 2 データ出力(1.8V から 3.3V へレベルシフト) | Output |
| 6 | - | - | グラウンド | Ground |
ハードウェア接続
使用手順
Step 1. I2S2 オーディオ MUX を設定し、テストトーン出力を行います:
# Configure I2S2 mux
amixer -c 2 sset "I2S2 Mux" "ADMAIF1"
# Play a 440Hz sine wave test tone (one iteration)
speaker-test -D hw:2,0 -c 2 -r 48000 -t sine -f 440 -l 1
-l 1 フラグは、テストトーンが一度だけ再生され、その後停止することを意味します。
ステップ 2. 自分の音声ファイルを再生します:
aplay -D hw:2,0 -c 2 -r 48000 your_audio_file.wav
your_audio_file.wav を実際の音声ファイルへのパスに置き換えてください。音声ファイルのフォーマットが指定されたサンプルレート(48000 Hz)とチャンネル数(2)に一致していることを確認してください。
I2C
Robotics J601 は J12 JST GH-1.25 コネクタ経由で I2C インターフェースを提供し、センサーや周辺機器を簡単に接続してシステムを拡張できます。
ピン定義
| ピン # | モジュールピン名 | モジュールピン # | 用途/説明 | 種別/方向 |
|---|---|---|---|---|
| 1 | - | - | グラウンド | Ground |
| 2 | DP_AUX_CH2_N | E18 | I2C4_SDA_3V3 | 双方向 |
| 3 | DP_AUX_CH2_P | E19 | I2C4_SCL_3V3 | 出力 |
| 4 | - | - | 3V3 電源 | 電源 |
I2C コネクタは Jetson AGX Thor SoC 上の I2C4 バスを使用します。
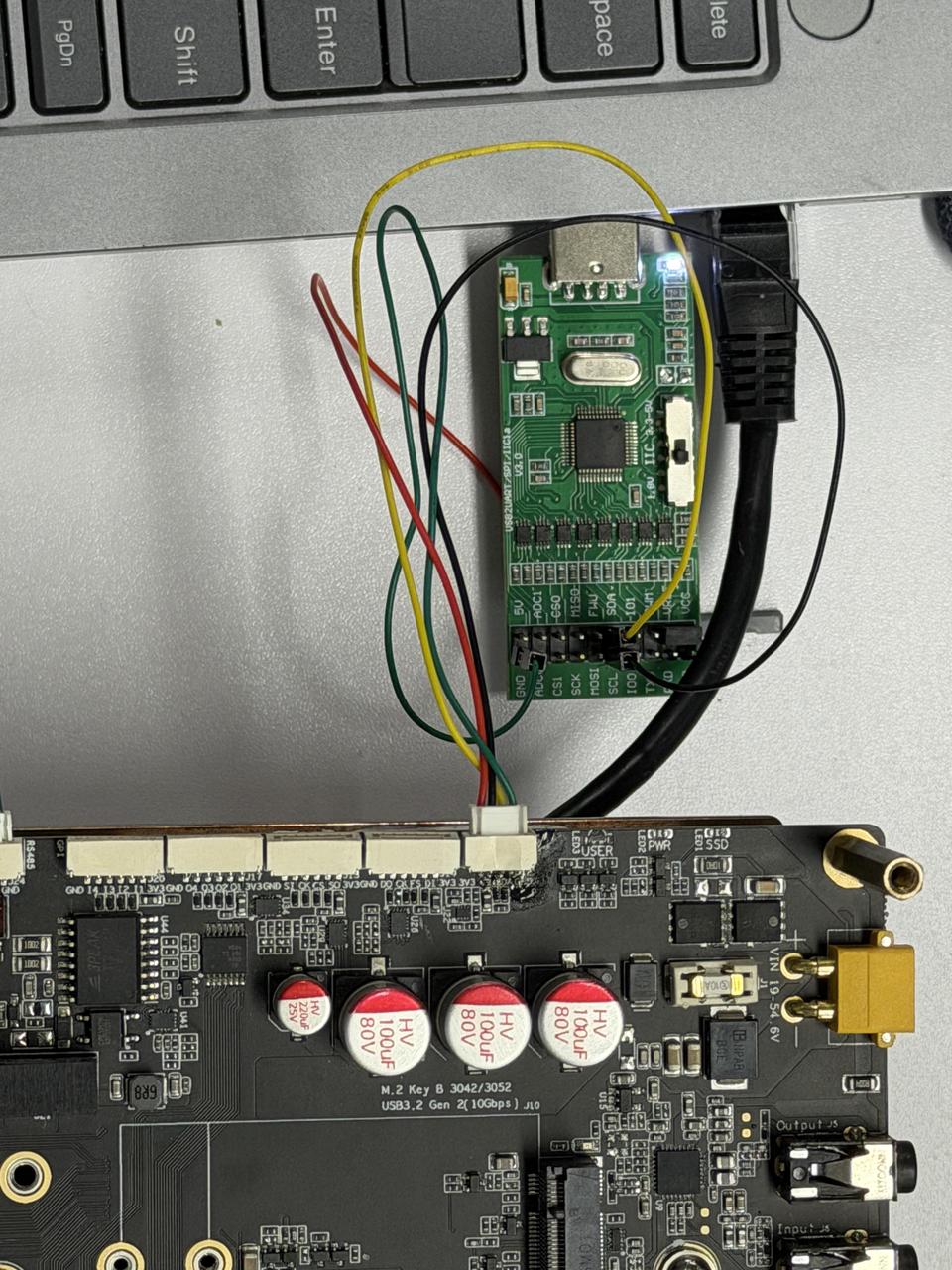
ハードウェア接続
I2C デバイスをキャリアボード上の I2C インターフェースに接続します:
- Ground → Ground(ピン 1)
- SDA → SDA(ピン 2)
- SCL → SCL(ピン 3)
- Power → 3V3(ピン 4)
使用手順
ステップ 1. I2C テストツールをインストールします:
sudo apt update
sudo apt-get install i2c-tools
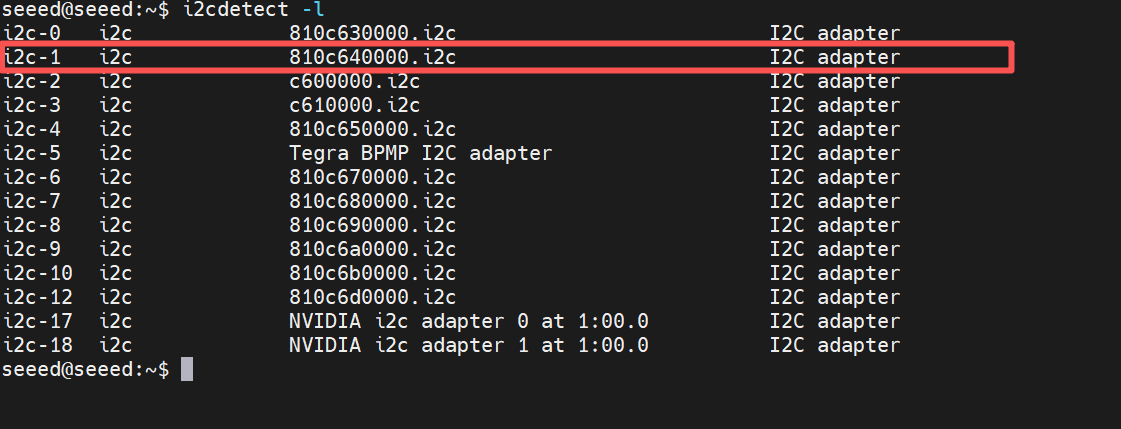
ステップ 2. I2C バスのマッピングを表示します:
i2cdetect -l
ステップ 3. I2C バス上のデバイスをスキャンします:
sudo i2cdetect -y -r 1
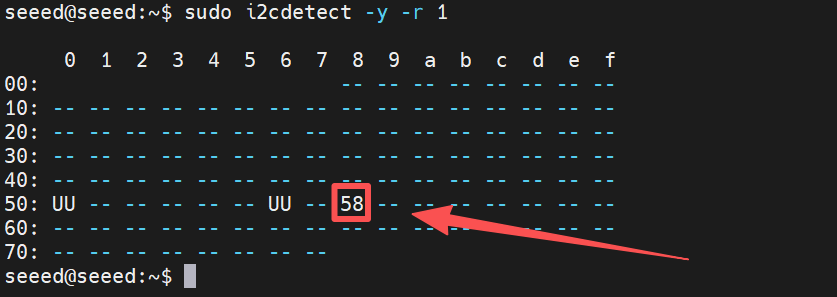
ステップ 4. I2C デバイスからレジスタを読み取ります。例えば、バス i2c-1 上のアドレス 0x58 のデバイスからレジスタ 0x00 を読み取るには:
sudo i2cget -y 1 0x58 0x00

GPIO (GPI/GPO)
Robotics J601 は 2 つの JST GH-1.25 コネクタを介してデジタル GPIO インターフェースを提供します:4 つの入力チャネルを持つ GPI(汎用入力) コネクタ J20 と、4 つの出力チャネルを持つ GPO(汎用出力) コネクタ J14 です。すべての GPIO 信号は 1.8V(SoC ドメイン)から 3.3V にレベルシフトされており、標準的な 3.3V センサーや周辺機器と直接互換性があります。
ピン定義
GPI コネクタ - J20(入力)
| ピン # | モジュールピン名 | モジュールピン # | 用途/説明 | 種別/方向 |
|---|---|---|---|---|
| 1 | - | - | 3V3 電源 | 電源 |
| 2 | SPI2_MISO | D62 | GPI_1_3V3(1.8V から 3.3V へのレベルシフト) | 入力, 3.3V |
| 3 | GPIO64 | J6 | GPI_2_3V3(1.8V から 3.3V へのレベルシフト) | 入力, 3.3V |
| 4 | GPIO65 | J7 | GPI_3_3V3(1.8V から 3.3V へのレベルシフト) | 入力, 3.3V |
| 5 | GPIO49 | G6 | GPI_4_3V3(1.8V から 3.3V へのレベルシフト) | 入力, 3.3V |
| 6 | - | - | グラウンド | Ground |
GPO コネクタ - J14(出力)
| ピン # | モジュールピン名 | モジュールピン # | 用途/説明 | 種別/方向 |
|---|---|---|---|---|
| 1 | - | - | 3V3 電源 | 電源 |
| 2 | GPIO13 | G7 | GPO_1_3V3(1.8V から 3.3V へのレベルシフト) | 出力, 3.3V |
| 3 | SPI2_CS0_N | D60 | GPO_2_3V3(1.8V から 3.3V へのレベルシフト) | 出力, 3.3V |
| 4 | SPI2_CLK | E61 | GPO_3_3V3(1.8V から 3.3V へのレベルシフト) | 出力, 3.3V |
| 5 | SPI2_MOSI | F60 | GPO_4_3V3(1.8V から 3.3V へのレベルシフト) | 出力, 3.3V |
| 6 | - | - | グラウンド | Ground |
ハードウェア接続
GH-1.25 ケーブルを使用して、GPIO デバイスをキャリアボード上の GPI または GPO コネクタに接続します:
- VCC → 3V3(ピン 1)
- Signal → GPI/GPO ピン(ピン 2–5)
- GND → Ground(ピン 6)
使用手順
GPI および GPO ピンには libgpiod(gpioset / gpioget)経由でアクセスできます。gpioinfo を使用して GPIO チップとライン番号を確認できます。
ステップ 1. GPIO ユーティリティをインストールします:
sudo apt update
sudo apt-get install gpiod
ステップ 2. 利用可能なすべての GPIO チップとラインを表示します:
gpioinfo
ステップ 3. GPI ピンを読み取ります。例えば、GPI_2(GPIO64、J20 のピン 3)を読み取るには:
# Replace <chip> and <line> with the actual GPIO chip/line numbers from gpioinfo
gpioget <chip> <line>
ステップ 4. GPO ピンに書き込みます。例えば、GPO_1(GPIO13、J14 のピン 2)を High に設定するには:
# Replace <chip> and <line> with the actual GPIO chip/line numbers from gpioinfo
gpioset <chip> <line>=1
ステップ 5. gpiod ライブラリを使用して Python スクリプト内でピンを使用します:
import gpiod
# Replace chip and line numbers based on your gpioinfo output
chip = gpiod.Chip('<chip_number>')
# Read GPI example
gpi_line = chip.get_line(<gpi_line_number>)
gpi_line.request(consumer="gpi_test", type=gpiod.LINE_REQ_DIR_IN)
print("GPI value:", gpi_line.get_value())
# Write GPO example
gpo_line = chip.get_line(<gpo_line_number>)
gpo_line.request(consumer="gpo_test", type=gpiod.LINE_REQ_DIR_OUT)
gpo_line.set_value(1) # Set high
CAN
CAN(Controller Area Network)は、ホストコンピュータなしでマイコンやデバイス同士が通信できる堅牢な車載バス規格です。Robotics J601 は JST GH-1.25 コネクタを介して 4 つの CAN インターフェース(CAN0、CAN1、CAN2、CAN3)を提供し、すべて CAN FD モードをサポートします。
CAN コネクタのピンマッピング
| CAN インターフェース | コネクタ | ピン 1 | ピン 2 | ピン 3 | ピン 4 |
|---|---|---|---|---|---|
| CAN0 | J31 | Ground | CAN0_L_ISO | CAN0_H_ISO | 5V 電源 |
| CAN1 | J30 | Ground | CAN1_L_ISO | CAN1_H_ISO | 5V 電源 |
| CAN2 | J28 | Ground | CAN2_L_ISO | CAN2_H_ISO | 5V 電源 |
| CAN3 | J25 | Ground | CAN3_L_ISO | CAN3_H_ISO | 5V 電源 |
4 つの CAN インターフェースはすべてアイソレートされています。各コネクタはピン 4 に 5V 電源を提供します。
120Ω 終端抵抗の制御
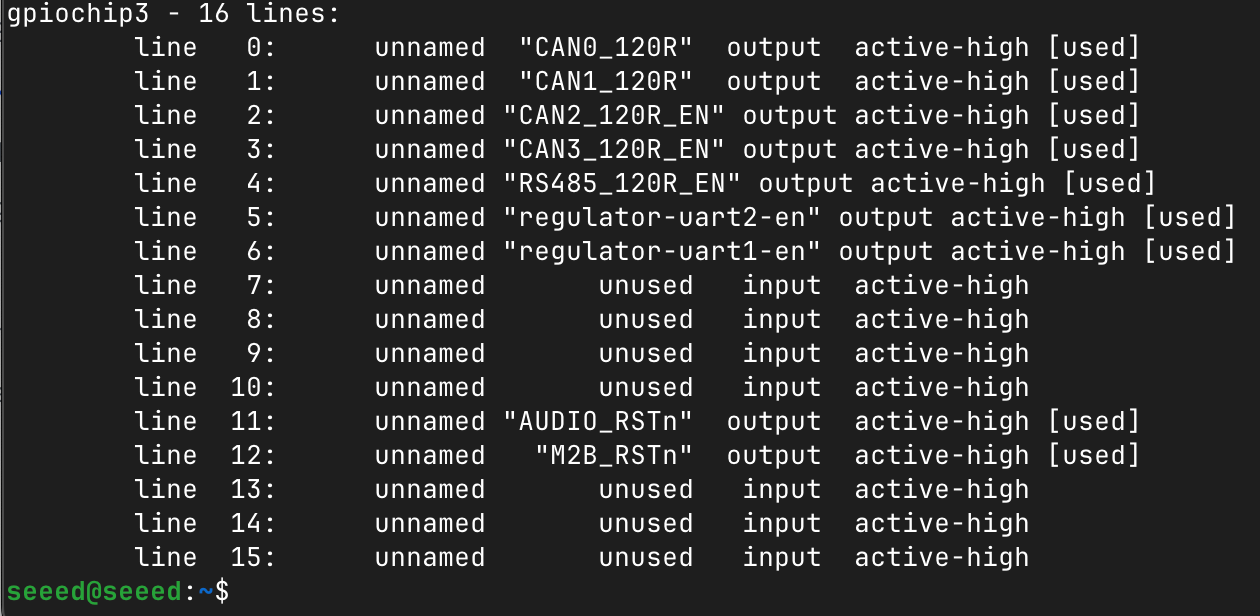
各 CAN インターフェースには、ソフトウェア制御可能な 120Ω 終端抵抗があります。GPIO のマッピングは次のとおりです:
| インターフェース | GPIO チップ | GPIO ライン | 制御名 |
|---|---|---|---|
| CAN0_120R_EN_3V3 | 3 | 0 | CAN0 終端 |
| CAN1_120R_EN_3V3 | 3 | 1 | CAN1 終端 |
| CAN2_120R_EN_3V3 | 3 | 2 | CAN2 終端 |
| CAN3_120R_EN_3V3 | 3 | 3 | CAN3 終端 |
| RS485_120R_EN_3V3 | 3 | 4 | RS485 終端 |
対応する GPIO ラインは次のコマンドで確認できます:
gpioinfo
CAN クラシック通信
ここでは CAN0 と CAN1 間のデータ通信をデモします。
ステップ 1. CAN ユーティリティをインストールします:
sudo apt update
sudo apt install can-utils -y
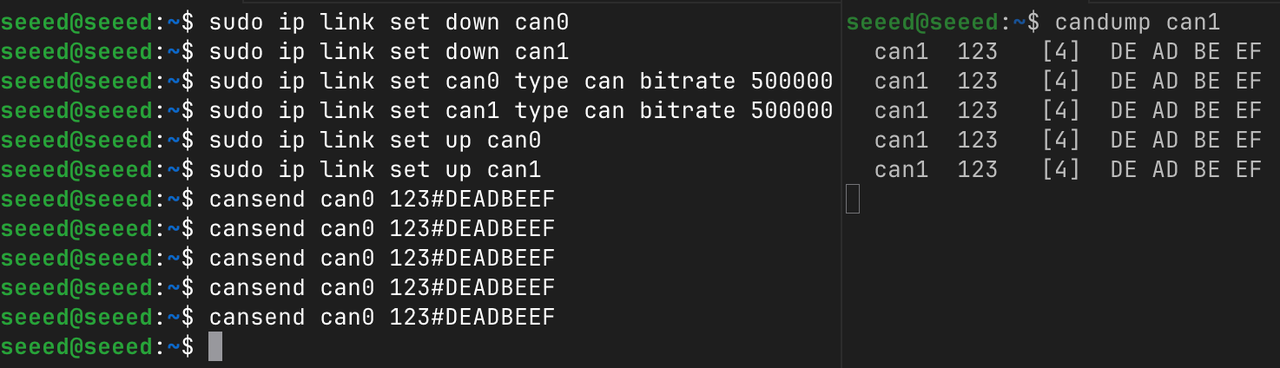
ステップ 2. CAN インターフェースを設定します:
sudo ip link set down can0
sudo ip link set down can1
sudo ip link set can0 type can bitrate 500000
sudo ip link set can1 type can bitrate 500000
sudo ip link set up can0
sudo ip link set up can1
ステップ 3. 新しいターミナルを開き、CAN1 でデータを受信し、CAN0 からデータを送信します:
# In a new terminal, listen on CAN1
candump can1
# In another terminal, send data from CAN0
cansend can0 123#DEADBEEF
CAN FD モード
CAN FD(Flexible Data-Rate)は、クラシック CAN プロトコルを拡張し、より高いデータレートとより大きなペイロード(最大 64 バイト)をサポートします。
ステップ 1. CAN0 と CAN1 を FD モード用に設定します:
sudo ip link set down can0
sudo ip link set down can1
sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 fd on
sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 fd on
sudo ip link set can0 txqueuelen 2000
sudo ip link set can1 txqueuelen 2000
sudo ip link set up can0
sudo ip link set up can1
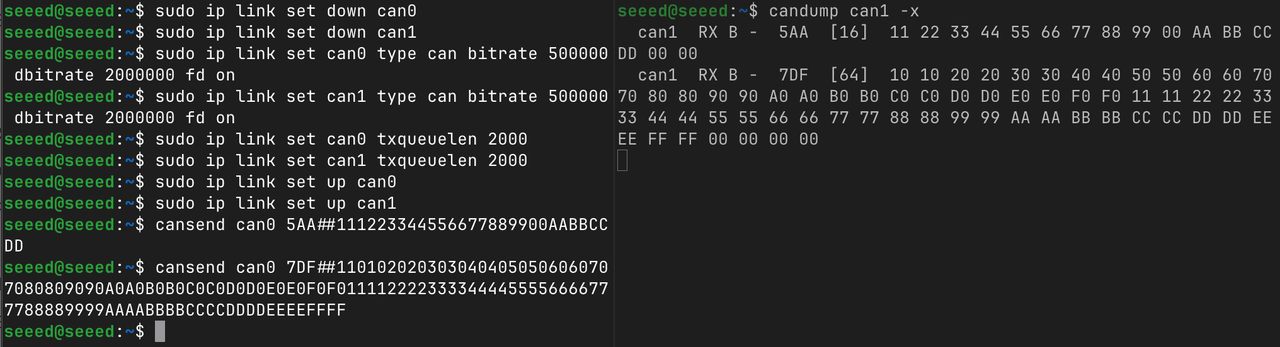
ステップ 2. 新しいターミナルを開き、CAN FD 通信をテストします:
# Listen on CAN1 with extended output
candump can1 -x
# Test 1: Send a 16-byte frame with BRS active
cansend can0 5AA##111223344556677889900AABBCCDD
# Test 2: Send a full 64-byte payload frame with BRS active
cansend can0 7DF##1101020203030404050506060707080809090A0A0B0B0C0C0D0D0E0E0F0F0111122223333444455556666777788889999AAAABBBBCCCCDDDDEEEEFFFF
5AA/7DFは CAN ID です##は CAN FD フレームを示します##の後の数字は BRS(Bit Rate Switch)フラグです:1= BRS 有効- その後に続くのがデータペイロードです(64 バイトの場合は最大 128 個の 16 進数文字)
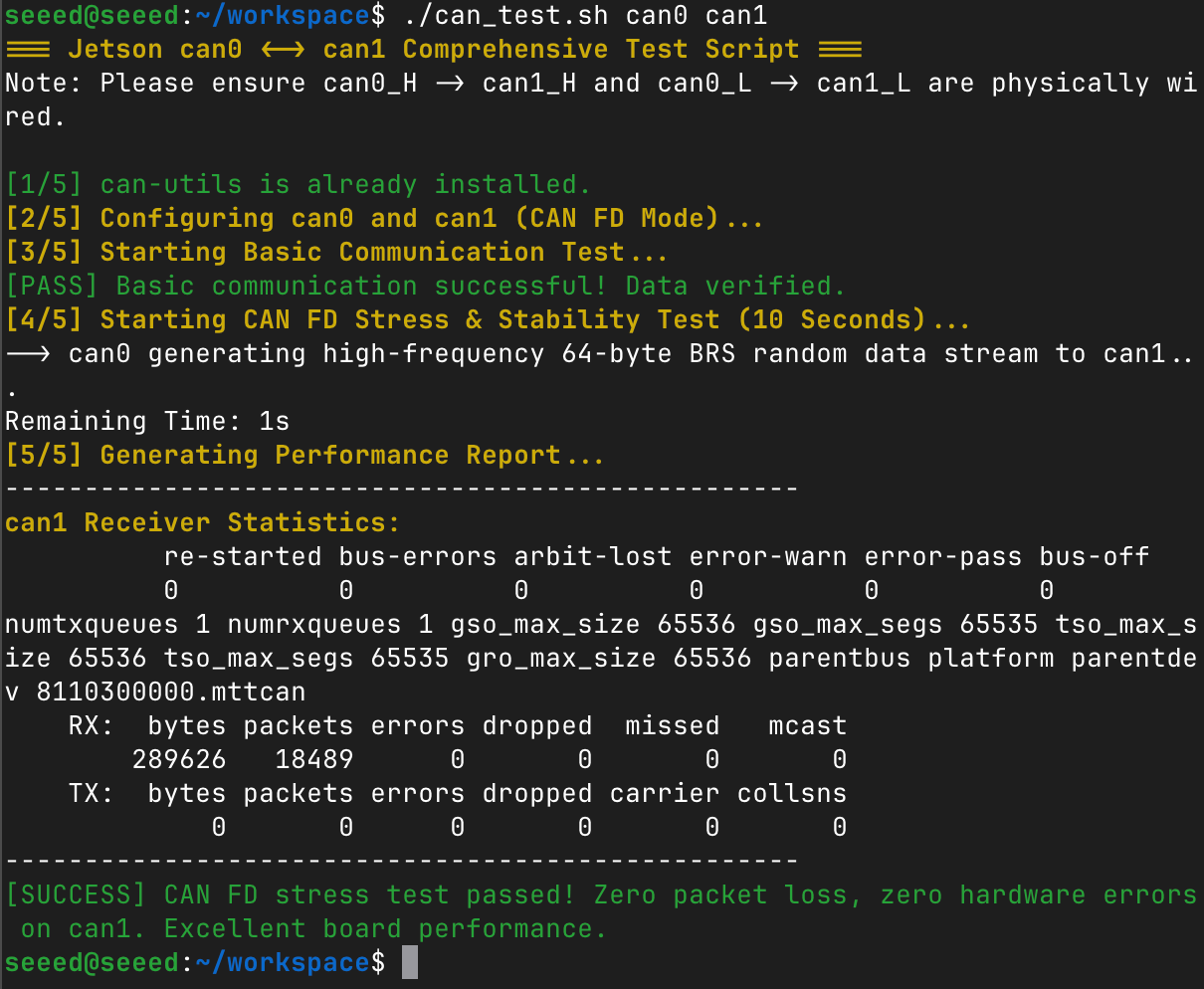
CAN 包括テストスクリプト
次のスクリプトは、依存関係のチェック、インターフェース設定、基本的な通信検証、および 10 秒間のストレステストを含む完全な CAN FD テストを実行します。
テストスクリプトを作成します:
vim can_test.sh
次の内容を貼り付けます:
クリックして CAN テストスクリプトを展開
#!/bin/bash
# Color output definitions
GREEN='\033[0;32m'
RED='\033[0;31m'
YELLOW='\033[1;33m'
NC='\033[0m' # No Color
# Assign interfaces from arguments, default to can0 and can1 if empty
TX_DEV=${1:-can0}
RX_DEV=${2:-can1}
echo -e "${YELLOW}=== Jetson $TX_DEV <-> $RX_DEV Comprehensive Test Script ===${NC}"
echo -e "Note: Please ensure ${TX_DEV}_H -> ${RX_DEV}_H and ${TX_DEV}_L -> ${RX_DEV}_L are physically wired.\n"
# 1. Dependency Check
if ! command -v candump &> /dev/null; then
echo -e "${YELLOW}[1/5] Installing can-utils...${NC}"
sudo apt update && sudo apt install can-utils -y
else
echo -e "${GREEN}[1/5] can-utils is already installed.${NC}"
fi
# 2. Reset and Configure Interfaces (Arbitration: 500K, Data: 2M, FD & BRS enabled)
echo -e "${YELLOW}[2/5] Configuring $TX_DEV and $RX_DEV (CAN FD Mode)...${NC}"
for dev in "$TX_DEV" "$RX_DEV"; do
# Check if the interface exists in the system
if ! ip link show "$dev" &> /dev/null; then
echo -e "${RED}[ERROR] Interface $dev does not exist. Please check your spelling or hardware.${NC}"
exit 1
fi
sudo ip link set down "$dev" 2>/dev/null
sudo ip link set "$dev" type can bitrate 500000 dbitrate 2000000 fd on
# Increase transmit queue length to prevent packet loss under heavy load
sudo ip link set "$dev" txqueuelen 2000
sudo ip link set up "$dev"
done
sleep 1
# 3. Basic Communication Test (Classic CAN Frame)
echo -e "${YELLOW}[3/5] Starting Basic Communication Test...${NC}"
# Listen for 1 frame on the receiver interface in the background and dump to a temp file
candump "$RX_DEV" -n 1 > /tmp/can_test_rx.log &
DUMP_PID=$!
sleep 0.5
# Send a single classic CAN frame from the transmitter interface
cansend "$TX_DEV" 123#DEADBEEF
# Wait for the background dump process to finish
wait $DUMP_PID 2>/dev/null
# Validate basic data
if grep -q "DE AD BE EF" /tmp/can_test_rx.log; then
echo -e "${GREEN}[PASS] Basic communication successful! Data verified.${NC}"
else
echo -e "${RED}[FAIL] Basic communication failed! No data received or data corrupted.${NC}"
tail -n 2 /tmp/can_test_rx.log 2>/dev/null
exit 1
fi
# 4. CAN FD High-Load Stress Test
echo -e "${YELLOW}[4/5] Starting CAN FD Stress & Stability Test (10 Seconds)...${NC}"
echo -e "--> $TX_DEV generating high-frequency 64-byte BRS random data stream to $RX_DEV..."
# Flood the bus using cangen (-f for FD, -b for BRS, -g 1 for 1ms interval)
cangen "$TX_DEV" -f -b -g 1 >/dev/null 2>&1 &
GEN_PID=$!
# Countdown timer
for i in {10..1}; do
echo -ne "Remaining Time: ${i}s \r"
sleep 1
done
echo ""
# Stop data generation
kill $GEN_PID 2>/dev/null
wait $GEN_PID 2>/dev/null
sleep 1
# 5. Analyze and Print Performance Report
echo -e "${YELLOW}[5/5] Generating Performance Report...${NC}"
echo "--------------------------------------------------"
echo -e "${YELLOW}$RX_DEV Receiver Statistics:${NC}"
# Extract packets and hardware error counters
ip -details -statistics link show "$RX_DEV" | grep -E -A 3 "(RX:|errors)"
echo "--------------------------------------------------"
# Smart assessment based on RX errors
ERRORS=$(ip -details -statistics link show "$RX_DEV" | grep -A 1 "RX: errors" | tail -n 1 | awk '{print $1}')
if [ "$ERRORS" ] && [ "$ERRORS" -gt 0 ]; then
echo -e "${RED}[WARNING] Test completed, but $RX_DEV encountered $ERRORS errors/dropped packets during stress testing. Check your wiring and termination resistors!${NC}"
else
echo -e "${GREEN}[SUCCESS] CAN FD stress test passed! Zero packet loss, zero hardware errors on $RX_DEV. Excellent board performance.${NC}"
fi
# Cleanup and tear down interfaces
for dev in "$TX_DEV" "$RX_DEV"; do sudo ip link set down "$dev"; done
rm -f /tmp/can_test_rx.log
スクリプトに実行権限を付与し、任意の2つのCANインターフェースをテストするために実行します:
chmod +x can_test.sh
./can_test.sh can0 can1
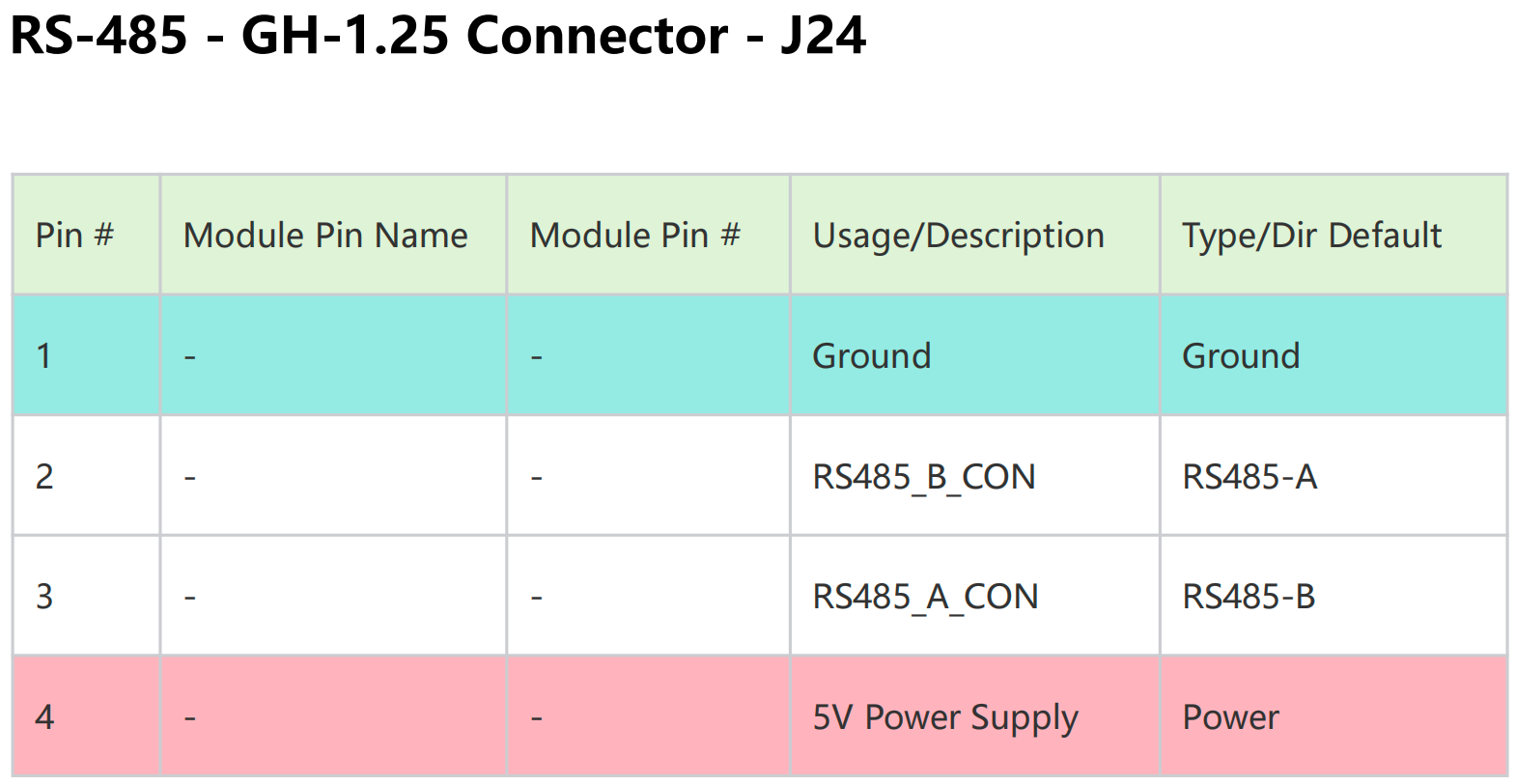
RS485
reComputer J601 キャリアボードには、J24 JST GH-1.25 4ピンコネクタから引き出された専用のアイソレートRS-485ポートが搭載されています。ピン定義は次のとおりです:
ハードウェア接続
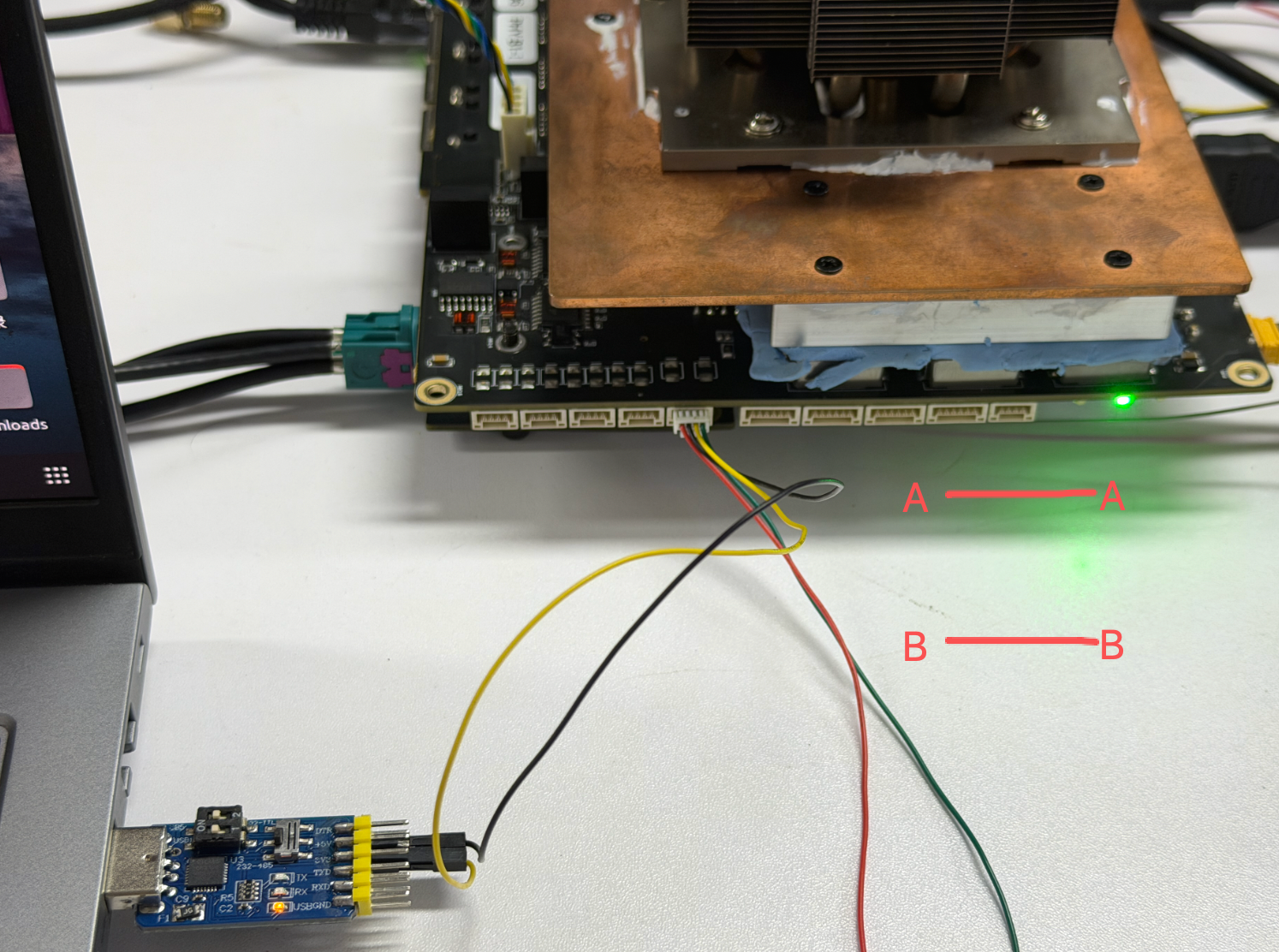
ここでは、テスト用に usb-to-rs485 を使用します:
#[Jetson] Init UART: 115200 baud, 8N1, raw mode, no flow control.
sudo stty -F /dev/ttyAMA10 115200 cs8 -cst -parenb -ixon -ixoff -crtscts raw -echo
# [Jetson] Enable and verify RS485 mode via ioctl (TIOCSRS485 / TIOCGRS485).
sudo python3 -c 'import os,fcntl,struct; fd=os.open("/dev/ttyAMA10",os.O_RDWR|os.O_NOCTTY); fcntl.ioctl(fd,0x542F,struct.pack("IIIIIIII",3,0,20,0,0,0,0,0)); out=bytearray(32); fcntl.ioctl(fd,0x542E,out,True); print(struct.unpack("IIIIIIII",out)); os.close(fd)'
# Verification output:(3, 0, 20, 0, 0, 0, 0, 0)
#[PC] Init USB UART with identical parameters.
sudo stty -F /dev/ttyUSB0 115200 cs8 -cstopb -parenb -ixon -ixoff -crtscts raw -echo
#[Jetson] Listen for data.
sudo cat /dev/ttyAMA10
#[PC] Send message.
echo "hello from pc" | sudo tee /dev/ttyUSB0 >/dev/null
#[PC] Listen for data.
sudo cat /dev/ttyUSB0
#[Jetson] Send message.、
echo "hello from jetson" | sudo tee /dev/ttyAMA10 >/dev/null


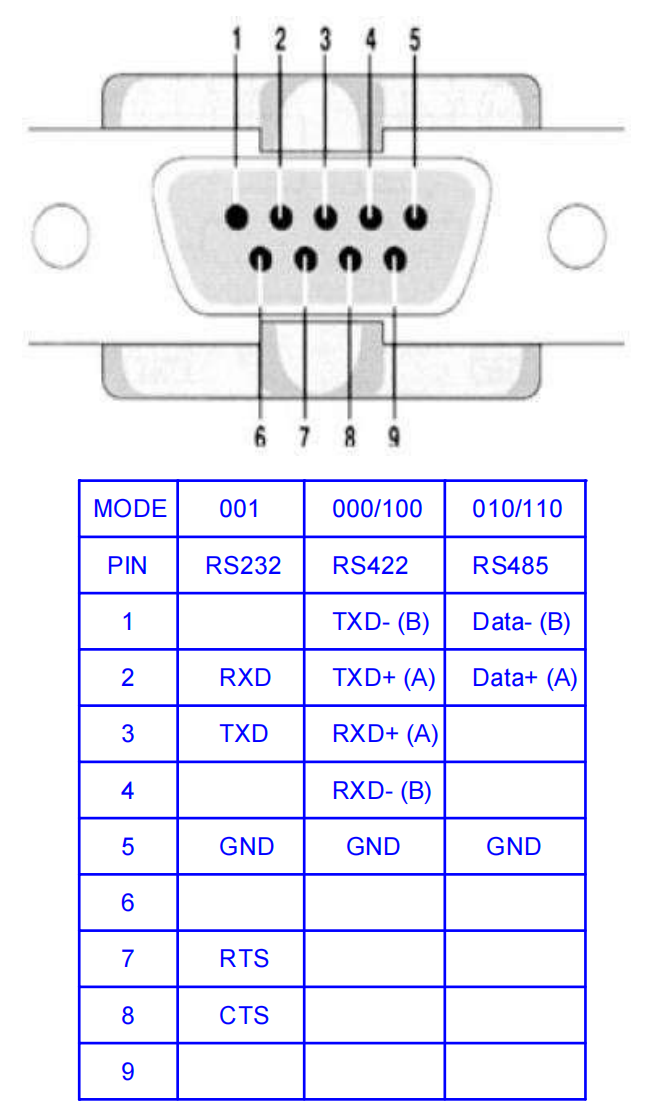
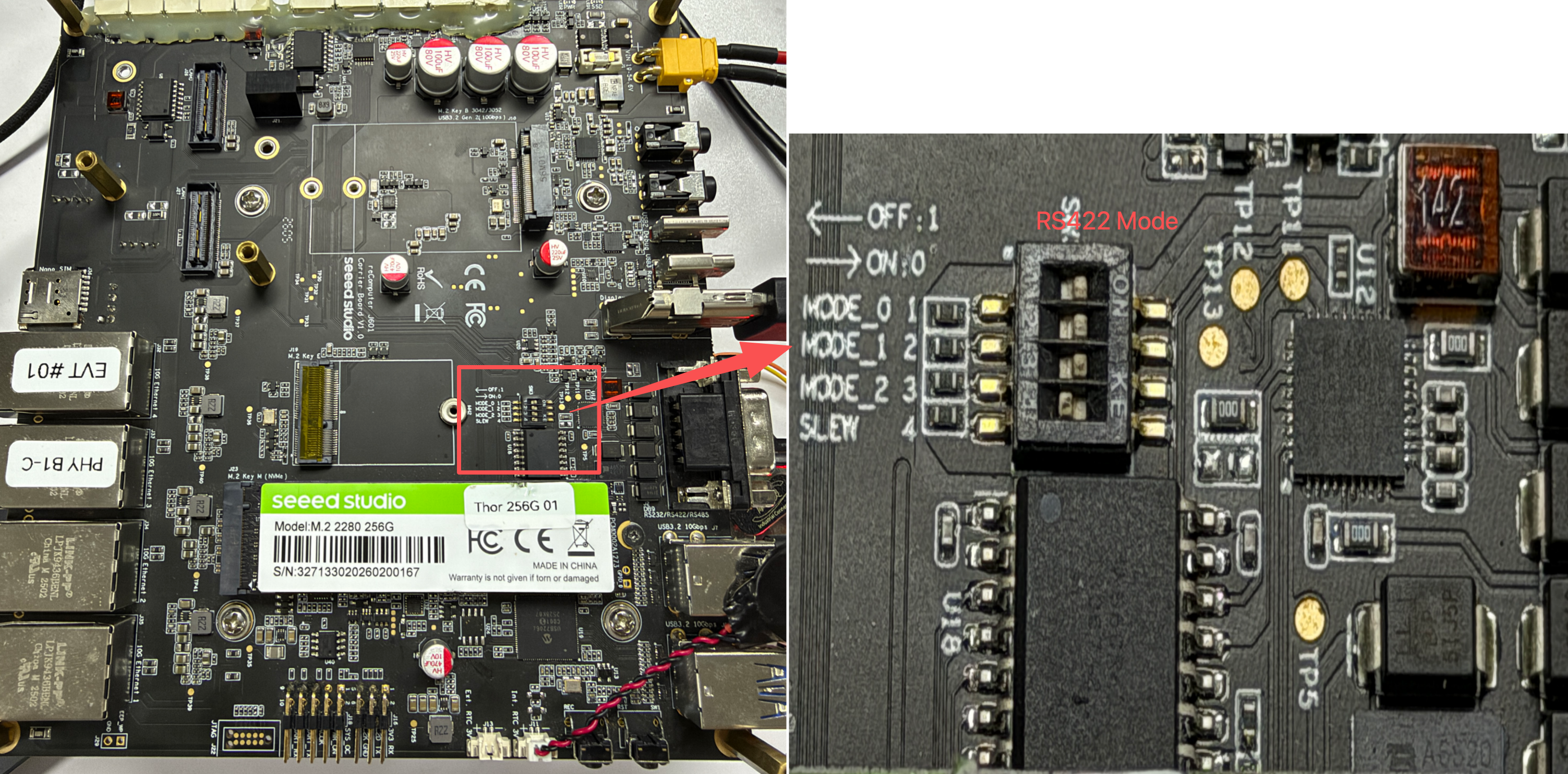
DB9 (RS232 / RS422 / RS485)
Robotics J601 はソフトウェアで切り替え可能な1つのDB9シリアルインターフェースを提供します。DB9ポートはJetsonシステム上の /dev/ttyAMA9 に接続されており、SW3 DIPスイッチを設定することでRS232、RS422、RS485として構成できます。
ピン定義
各DB9ピンの機能は、選択した通信モードによって異なります。アダプタを配線する前に、以下の表とコネクタ図を参照してください。
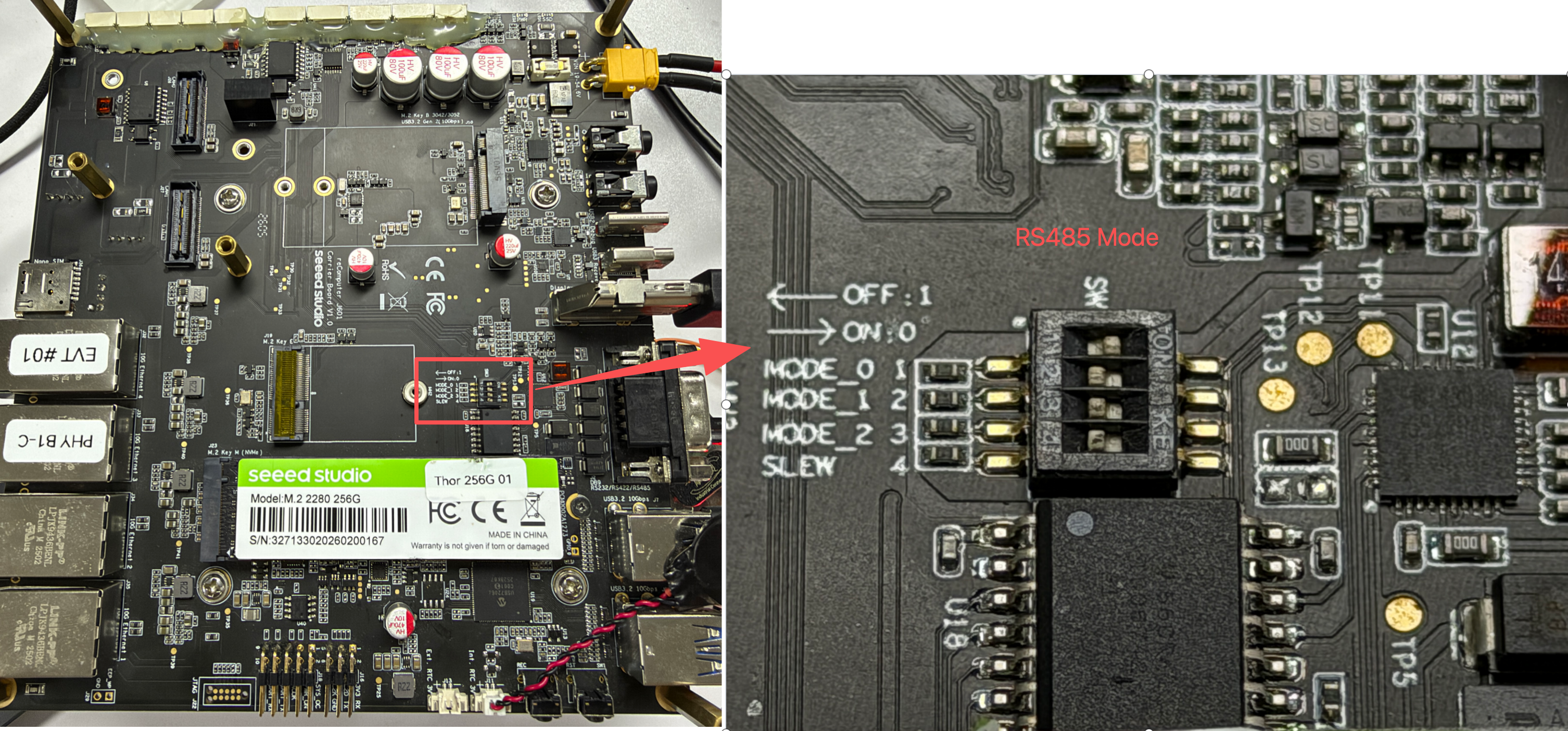
RS485モード
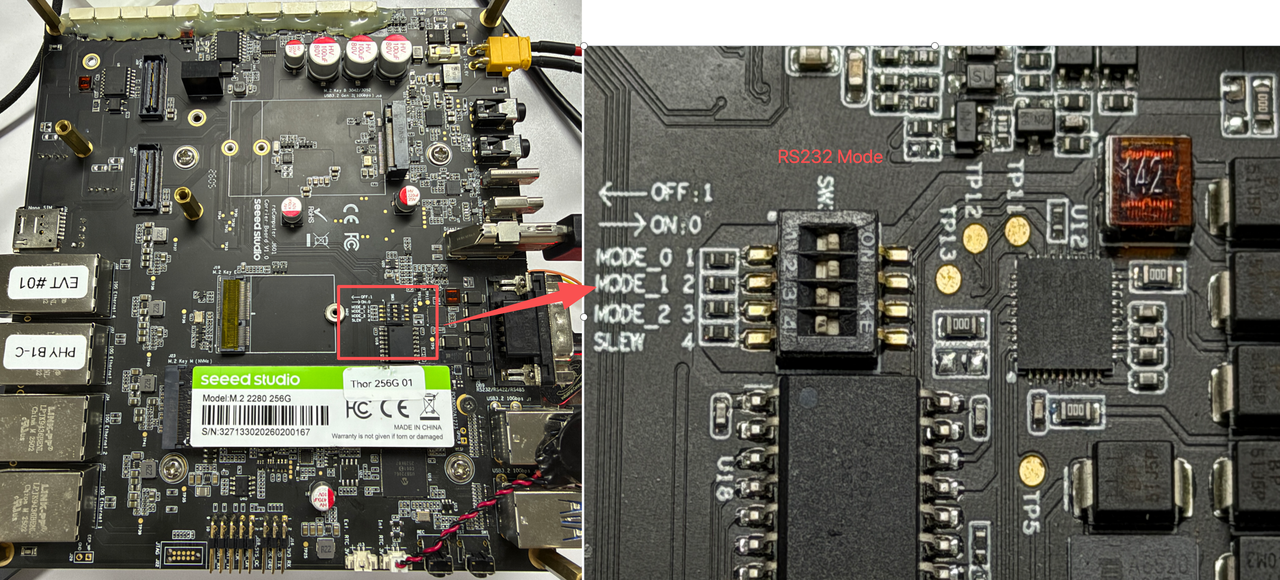
ハードウェア構成
ボード底面のスイッチを、下図のようにRS485モードに切り替えます。
ハードウェア接続
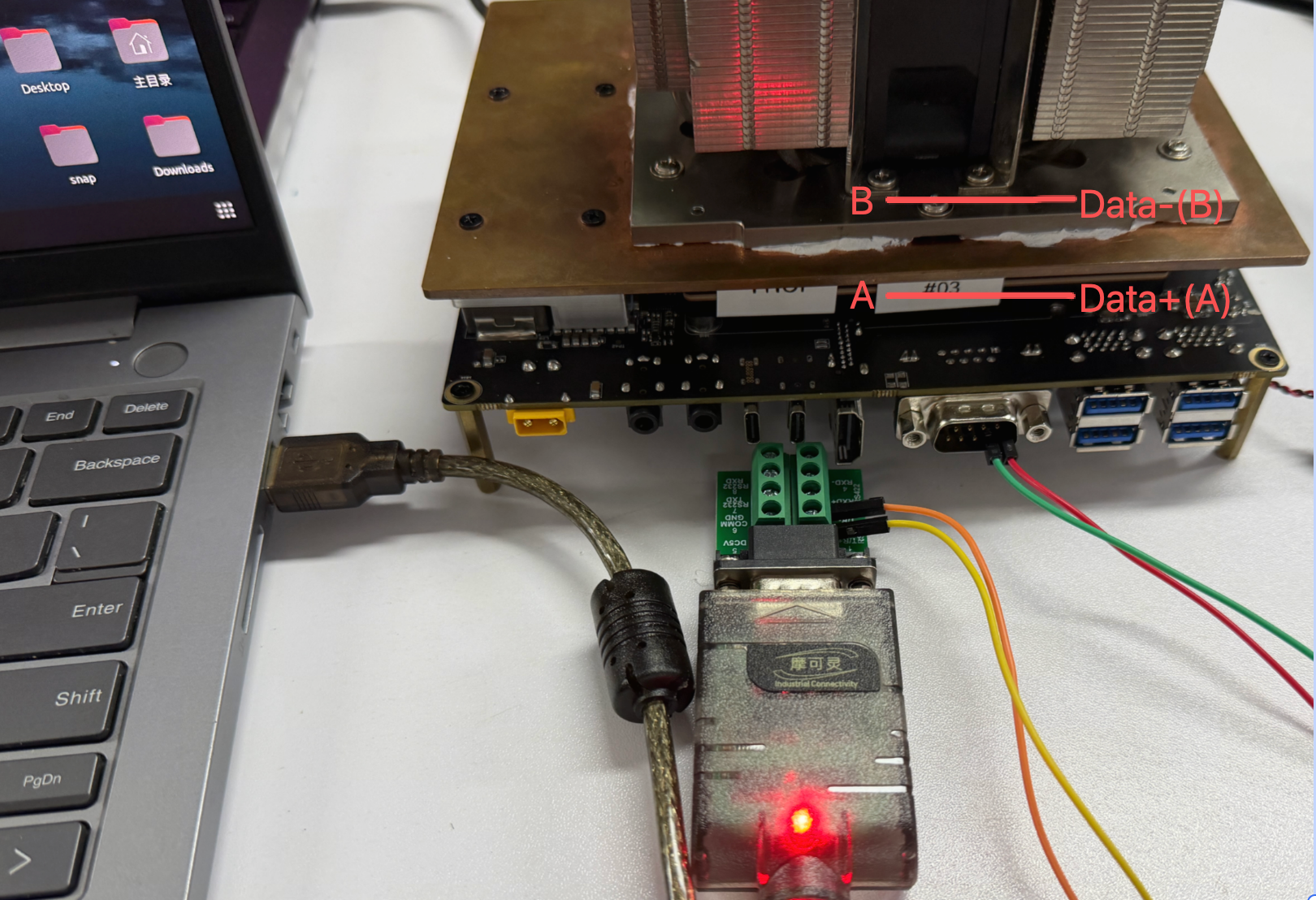
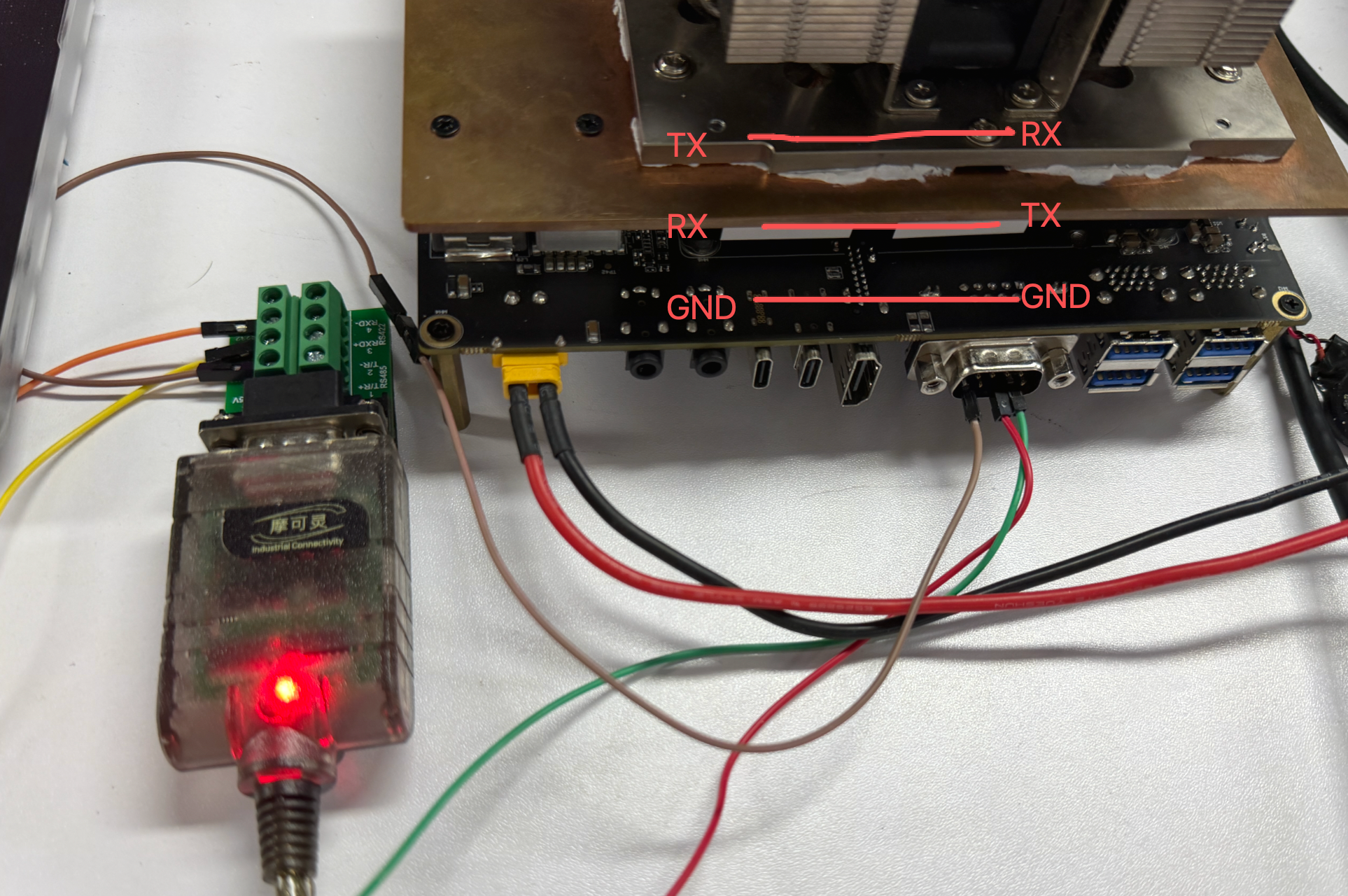
RS485配線では、USB-RS485アダプタの A/D+ をDB9ピン2に、B/D- をDB9ピン1に接続します。一部のUSB-RS485アダプタではA/Bのラベルが逆になっている場合があります。PCが送信していないのにJetsonがランダムなバイトを受信する場合は、AとBを入れ替えて再度テストしてください。
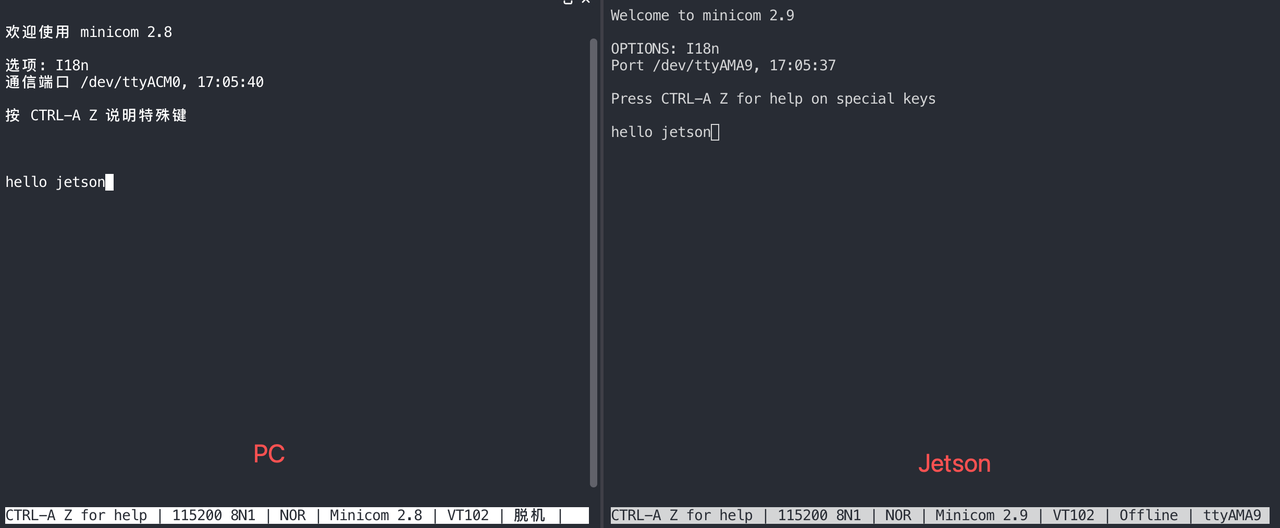
通信テスト
ここでは、minicom を使用してテストを行います:
# Set pin 6 on GPIO chip 3 to low level to enable the DB9 transceiver
sudo gpioset 3 6=0
# On Jetson terminal
sudo minicom -D /dev/ttyAMA9 -b 115200
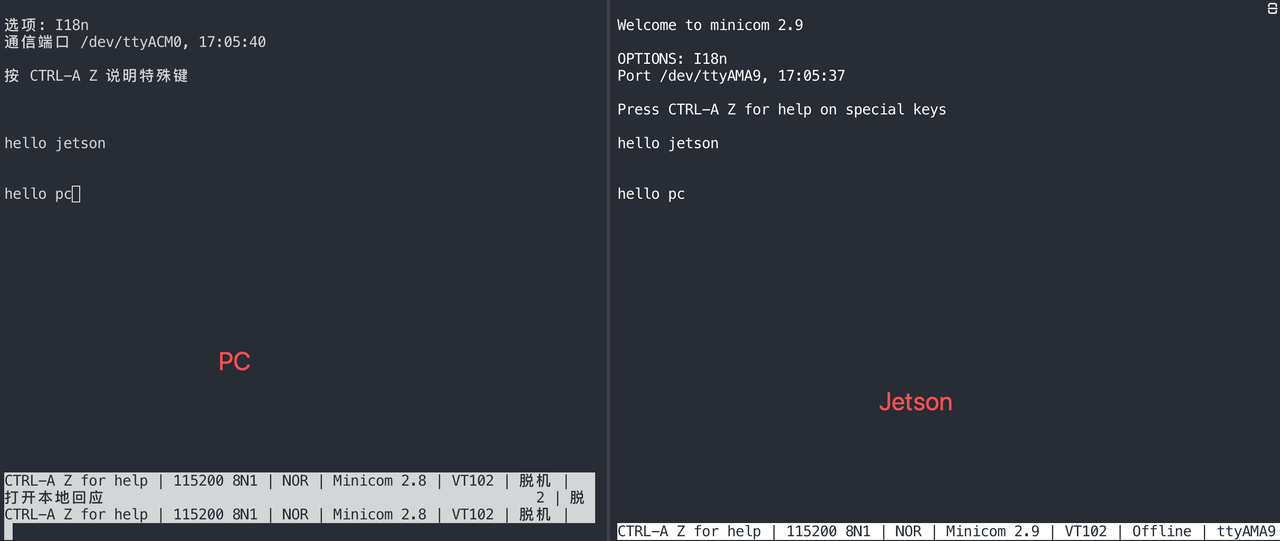
# On PC terminal
sudo minicom -D /dev/ttyACM0 -b 115200
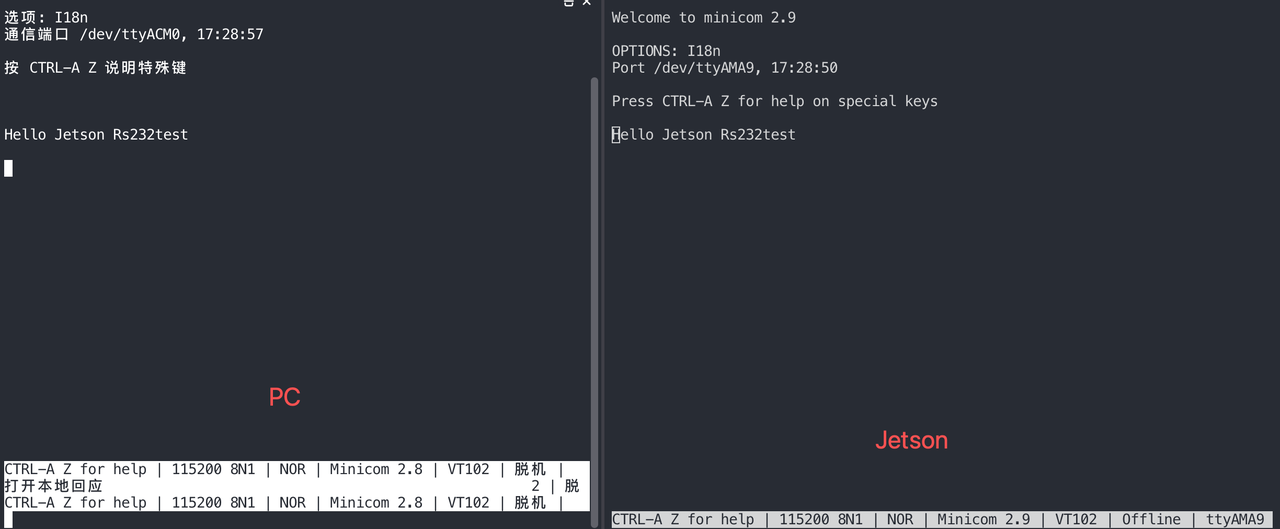
minicomで入力したテキストを表示するには、Local Echo 機能を有効にする必要があります。デフォルトでは、minicom はキー入力を表示しないため、これは非常によくある問題です。
- step 1.
Ctrl+Aを押します - step 2. 次に
Eを押します
PCからJetsonへメッセージを送信するテストを行います。
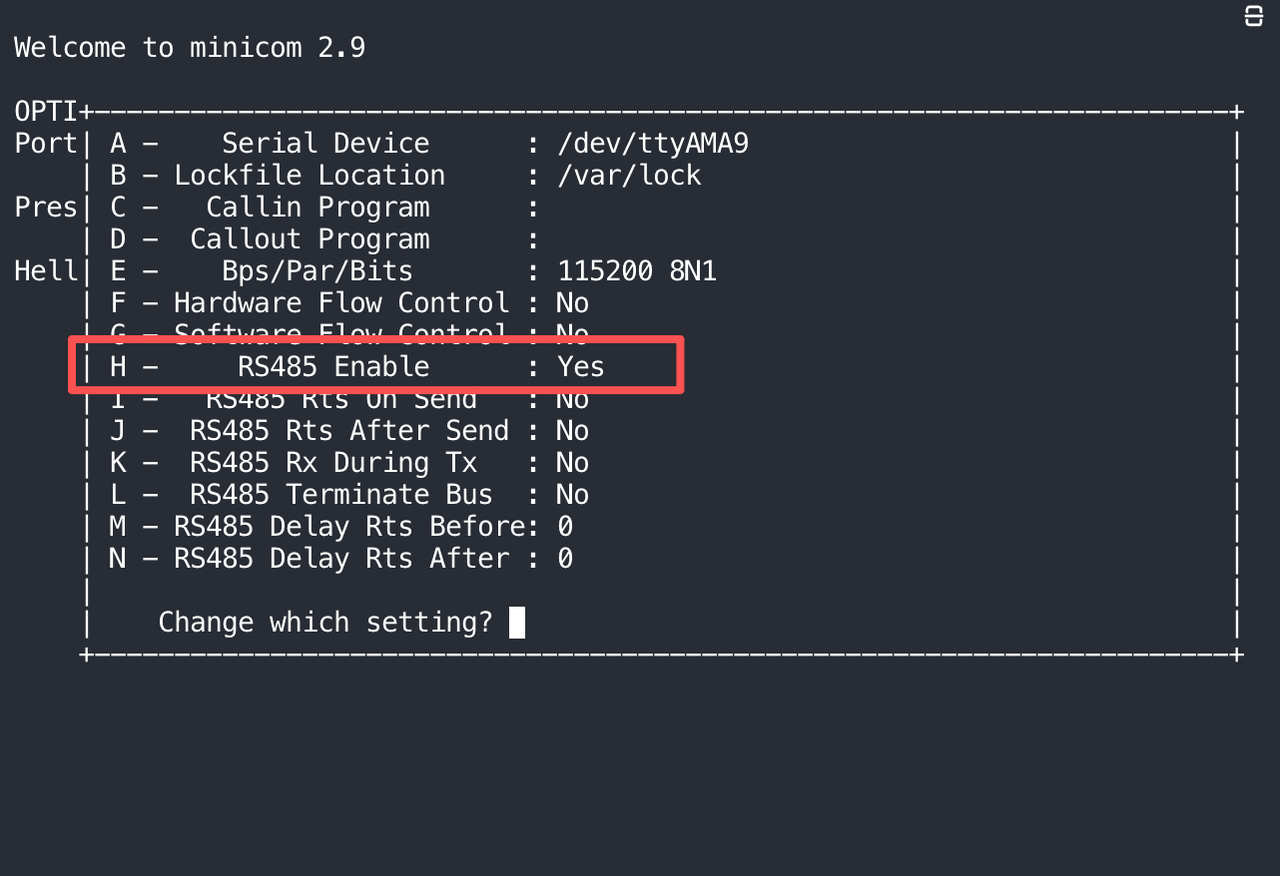
RS485は半二重プロトコルであるため、JetsonがRS485経由でPCに情報を送信できることをテストするには、RS485モードを有効にする必要があります。
- step 1.
Ctrl+Aを押します - step 2. 次に
Oを押して設定オプションを開きます。
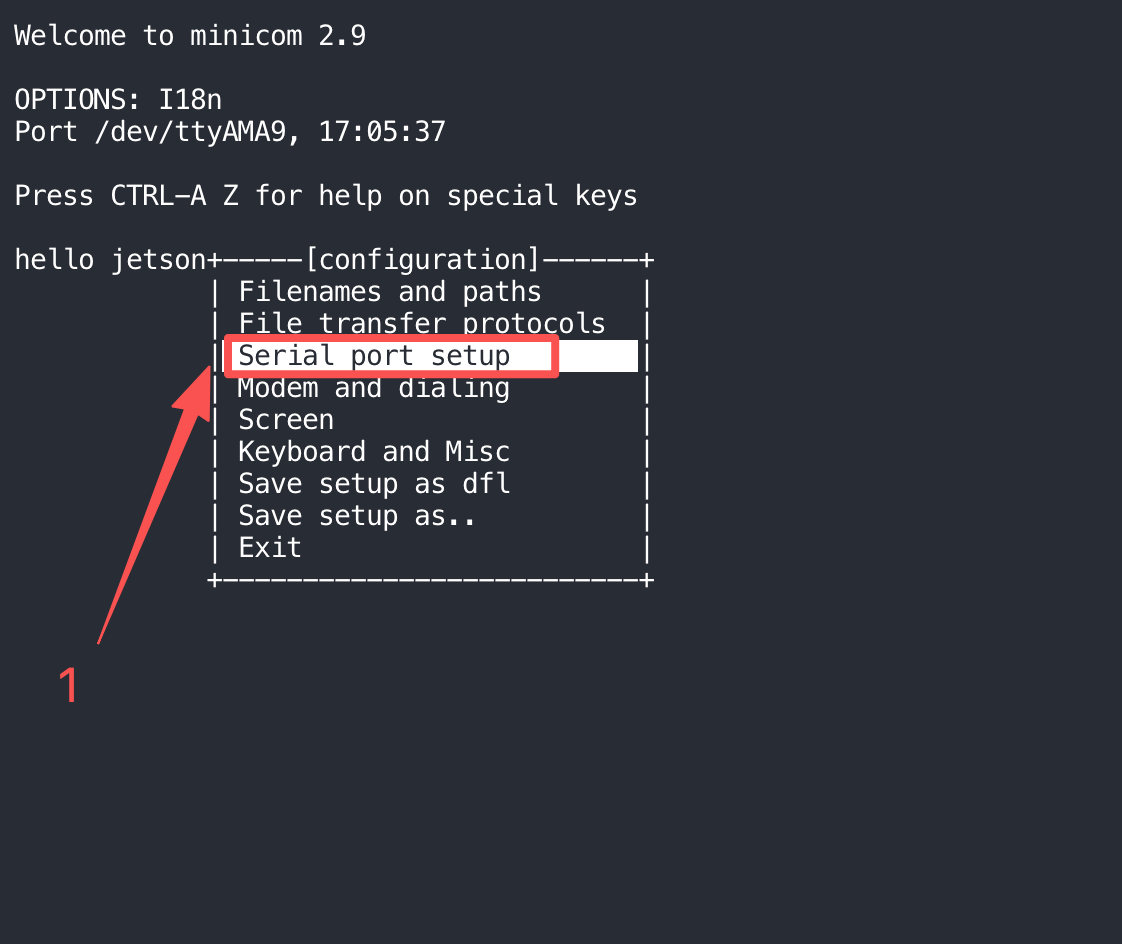
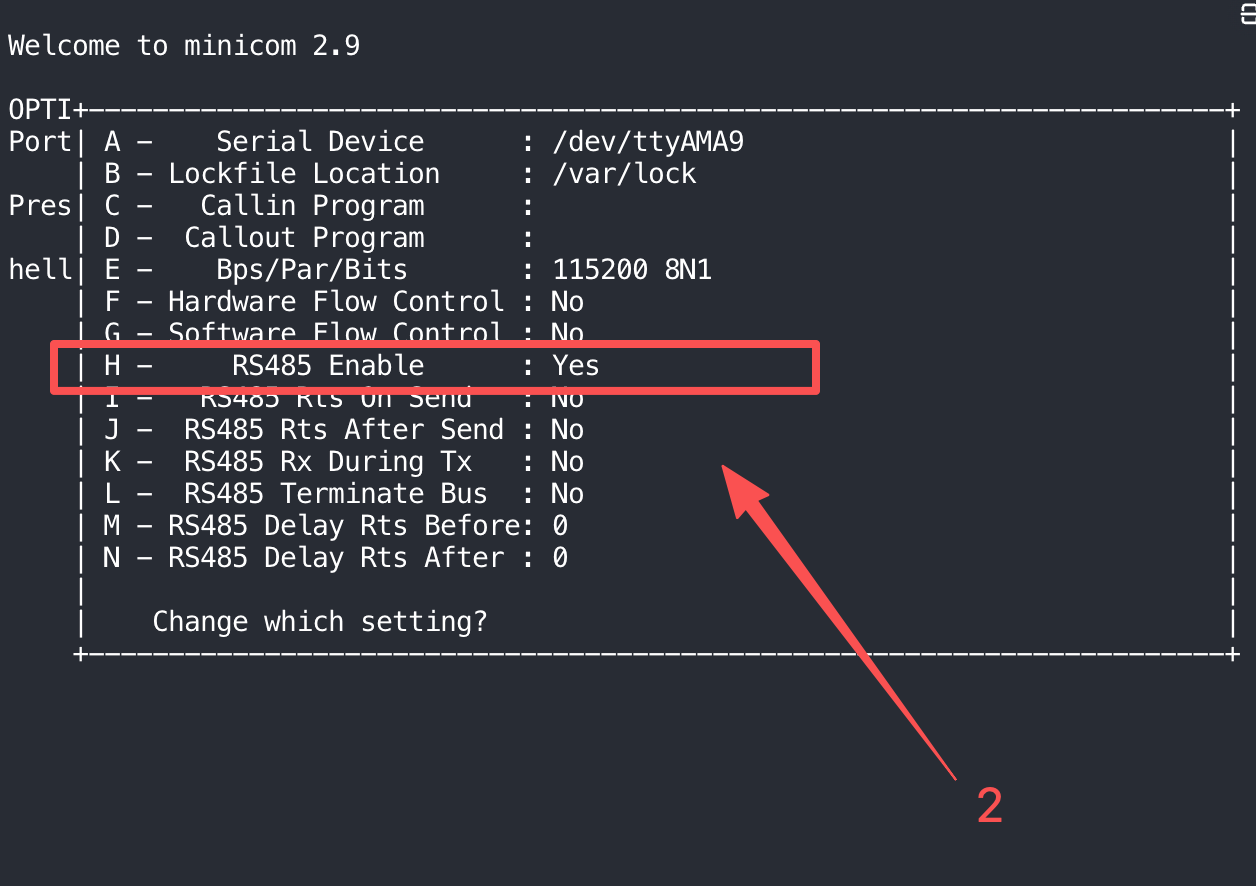
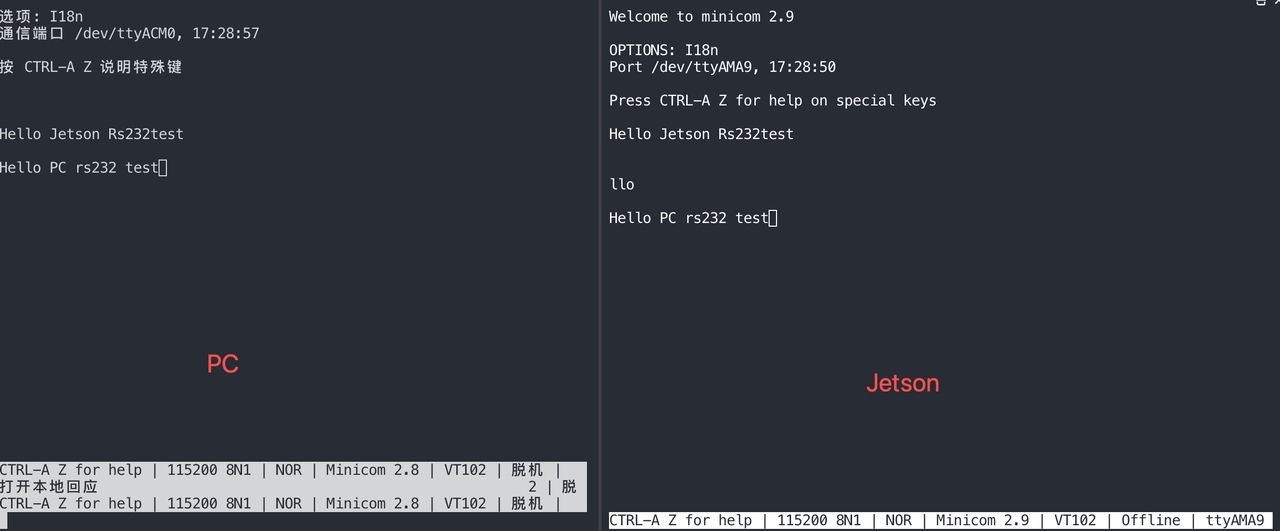
最後に、JetsonからPCへメッセージを送信できるようになります。
RS232モード
ハードウェア構成
ボード底面のスイッチを、下図のようにRS232モードに切り替えます。
ハードウェア接続
- TX → RX
- RX → TX
- GND → GND
通信テスト
ここでは、minicom を使用してテストを行います:
# Set pin 6 on GPIO chip 3 to low level to enable the DB9 transceiver
sudo gpioset 3 6=0
# On Jetson terminal
sudo minicom -D /dev/ttyAMA9 -b 115200
# On PC terminal
sudo minicom -D /dev/ttyACM0 -b 115200
minicomで入力したテキストを表示するには、Local Echo 機能を有効にする必要があります。デフォルトでは、minicom はキー入力を表示しないため、これは非常によくある問題です。
- step 1.
Ctrl+Aを押します - step 2. 次に
Eを押します
PCからJetsonへメッセージを送信するテストを行います。
テストモードも有効にします。
JetsonからPCへメッセージを送信します。
RS422モード
ハードウェア構成
ボード底面のスイッチを、下図のようにRS422モードに切り替えます。
ハードウェア接続
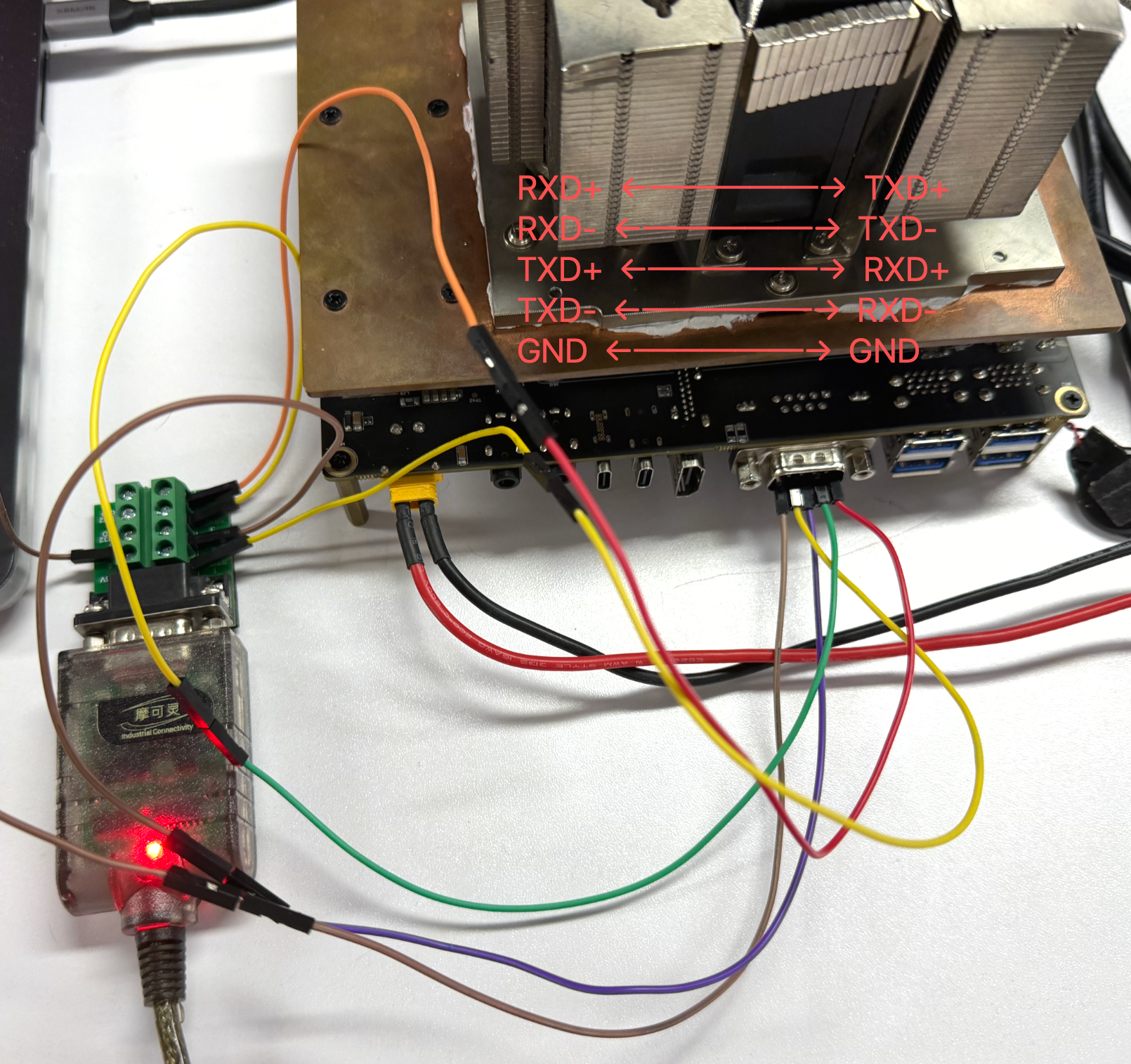
- RXD+ ←─────→ TXD+
- RXD- ←─────→ TXD-
- TXD+ ←─────→ RXD+
- TXD- ←─────→ RXD-
- GND ←─────→ GND
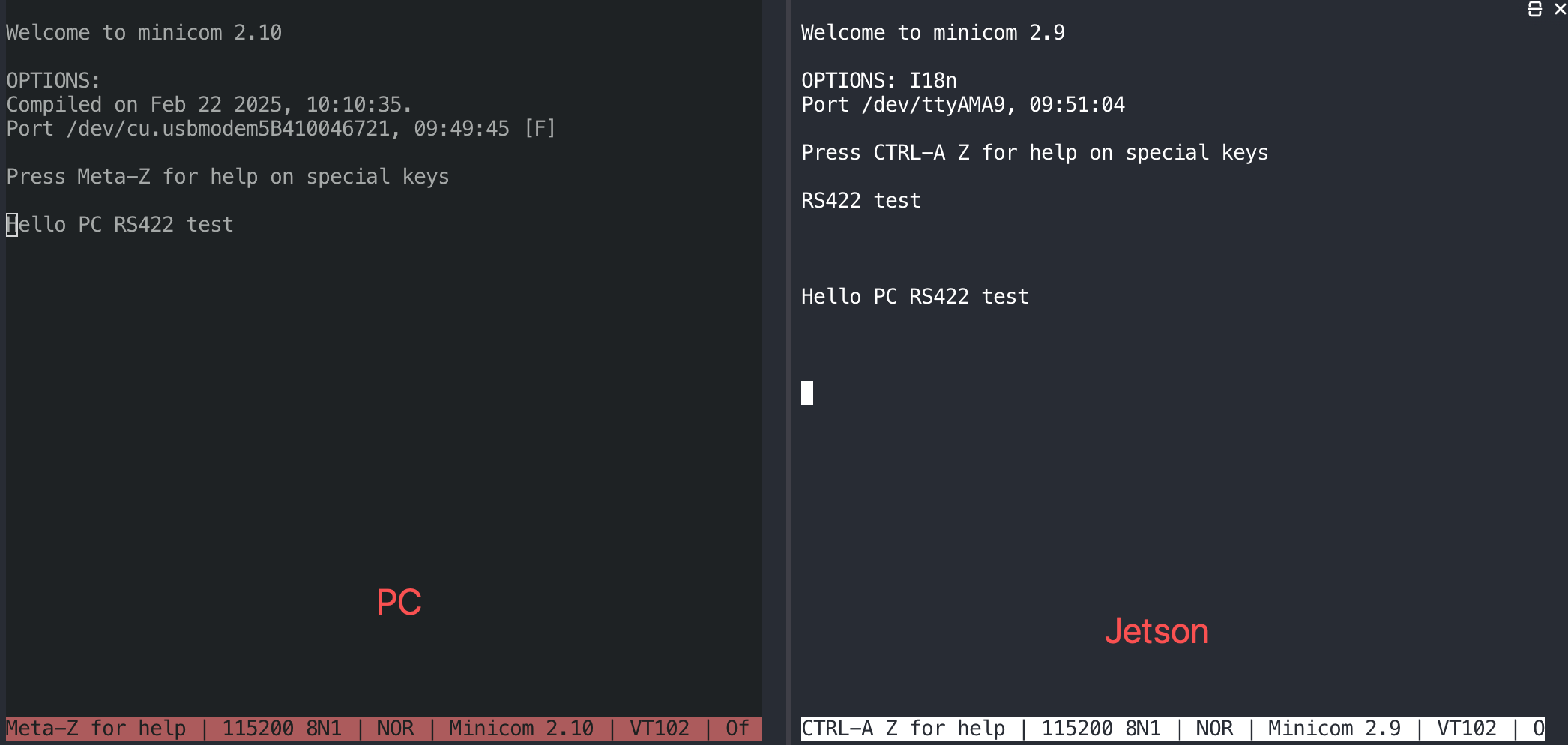
通信テスト
ここでは、minicom を使用してテストを行います:
# Set pin 6 on GPIO chip 3 to low level to enable the DB9 transceiver
sudo gpioset 3 6=0
# On Jetson terminal
sudo minicom -D /dev/ttyAMA9 -b 115200
# On PC terminal
sudo minicom -D /dev/ttyACM0 -b 115200
minicomで入力したテキストを表示するには、Local Echo 機能を有効にする必要があります。デフォルトでは、minicom はキー入力を表示しないため、これは非常によくある問題です。
- step 1.
Ctrl+Aを押します - step 2. 次に
Eを押します
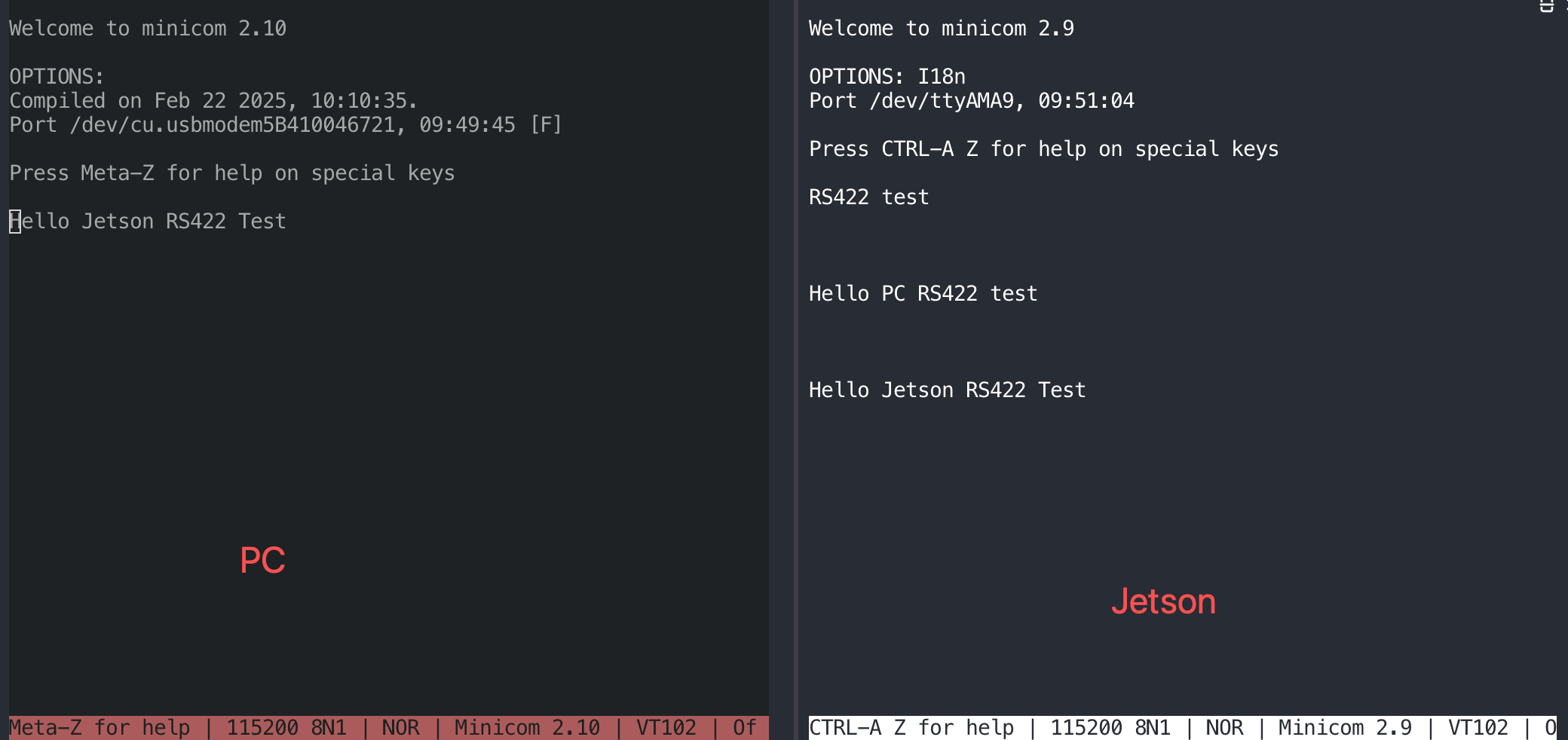
PCからJetsonへメッセージを送信するテストを行います。
テストモードも有効にします。
RGB
test_rgb.sh
#!/bin/bash
# ==============================================================================
# Script Name: test_rgb.sh
# Target Platform: Seeed reComputer J601 (Jetson)
# Description: Automatically tests RGB LEDs by lighting up Red, Green, Blue,
# and White colors sequentially for 1 second each.
# Usage: sudo ./test_rgb.sh
# ==============================================================================
# Define LED paths
LED_DIR="/sys/class/leds"
RED="$LED_DIR/red/brightness"
GREEN="$LED_DIR/green/brightness"
BLUE="$LED_DIR/blue/brightness"
# Check if running as root (sysfs write access requires root privileges)
if [ "$EUID" -ne 0 ]; then
echo "Error: Please run this script with sudo!"
echo "Example: sudo $0"
exit 1
fi
# Check if the hardware paths exist
if [ ! -d "$LED_DIR/red" ] || [ ! -d "$LED_DIR/green" ] || [ ! -d "$LED_DIR/blue" ]; then
echo "Error: RGB LED hardware paths not found. Please check your driver or device model."
exit 1
fi
# Helper function: Control LED states
# Arguments: set_leds <Red(0/1)> <Green(0/1)> <Blue(0/1)>
set_leds() {
echo "$1" > "$RED"
echo "$2" > "$GREEN"
echo "$3" > "$BLUE"
}
echo "========================================"
echo " Starting Jetson RGB LED Test "
echo "========================================"
# 1. Initialization: Turn off all LEDs
echo "-> Initializing: Turning off all LEDs"
set_leds 0 0 0
sleep 0.5
# 2. Red LED on for 1 second
echo "-> [ON] Red Light"
set_leds 1 0 0
sleep 1
# 3. Green LED on for 1 second
echo "-> [ON] Green Light"
set_leds 0 1 0
sleep 1
# 4. Blue LED on for 1 second
echo "-> [ON] Blue Light"
set_leds 0 0 1
sleep 1
# 5. Mixed White LED on for 1 second (Red + Green + Blue mixed)
echo "-> [ON] White Light (RGB Mixed)"
set_leds 1 1 1
sleep 1
# 6. Test completed, turn off all LEDs
echo "-> Test completed: Turning off all LEDs"
set_leds 0 0 0
echo "========================================"
echo " LED Test Ended "
echo "========================================"
sudo chmod +x test_rgb.sh
sudo ./test_rgb.sh
Ethernet
Robotics J601 キャリアボードには、有線ネットワーク接続用に 4x 10GbE RJ45 Ethernet ポートが搭載されており、PTPおよびEtherCATプロトコルのサポートが予定されています。(注:T4000モジュールは3x 10GbEをサポートします。)
ハードウェア接続
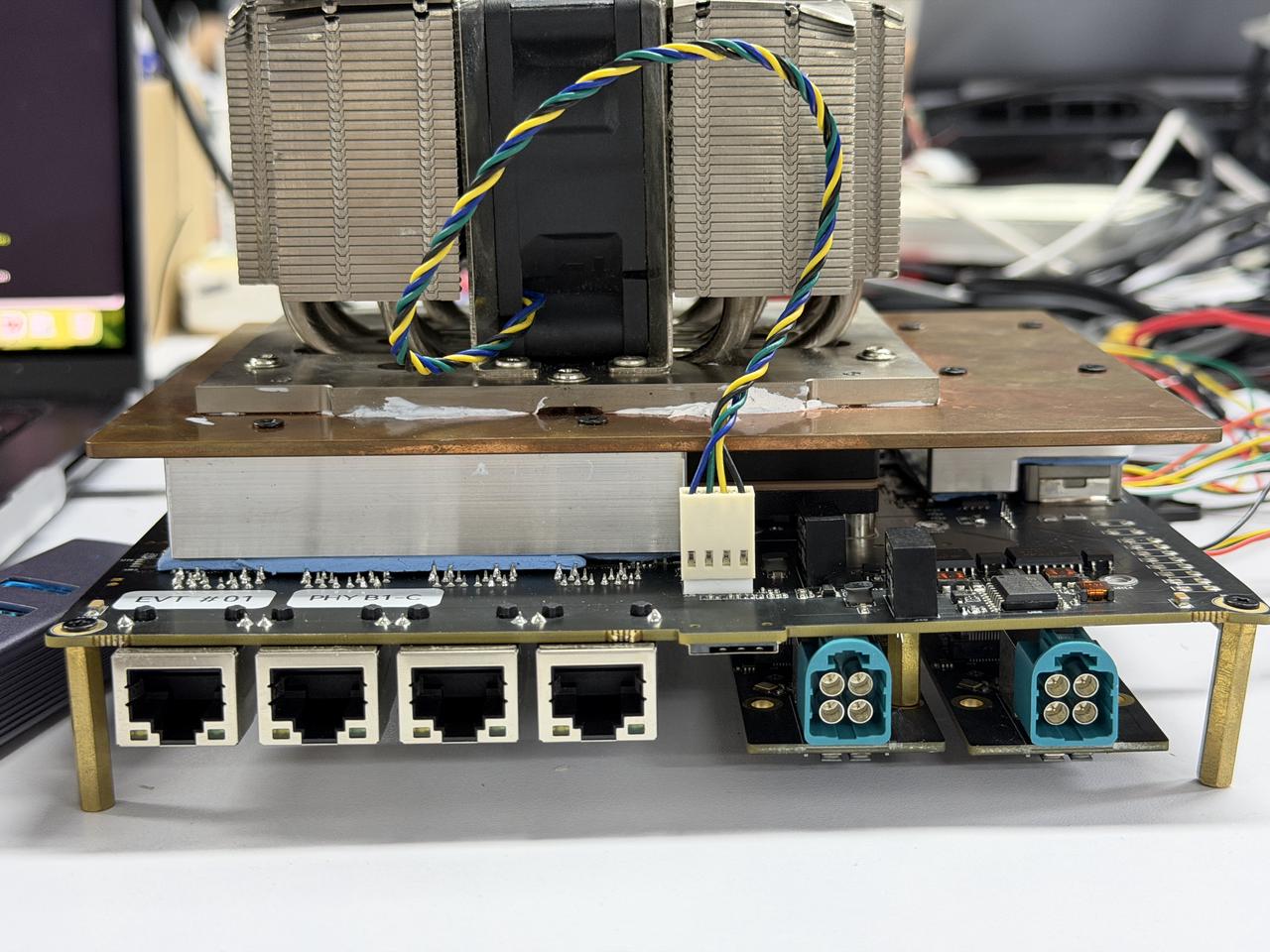
使用手順
Ethernet ポートの速度をテストするには、次のように iperf3 を使用します:
アップロード速度テスト:
iperf3 -c <server_ip> -B <bind_ip>
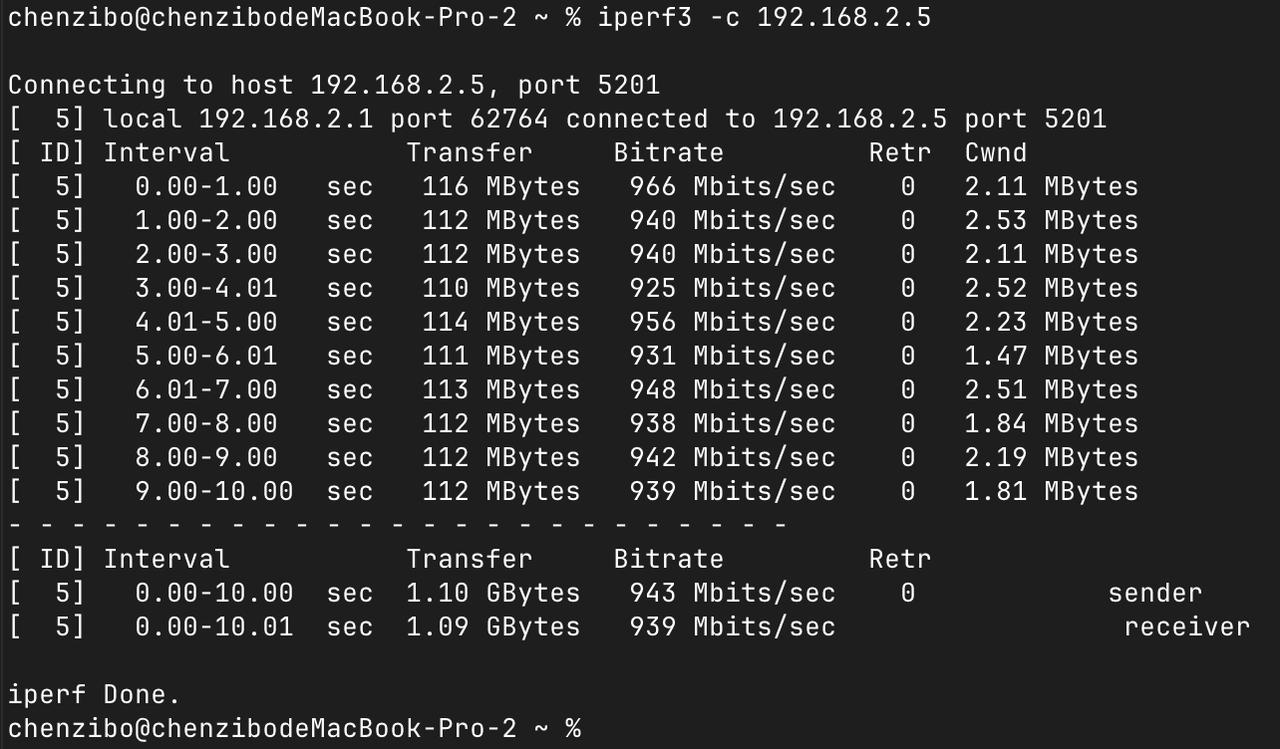
ダウンロード速度テスト:
iperf3 -c <server_ip> -B <bind_ip> -R
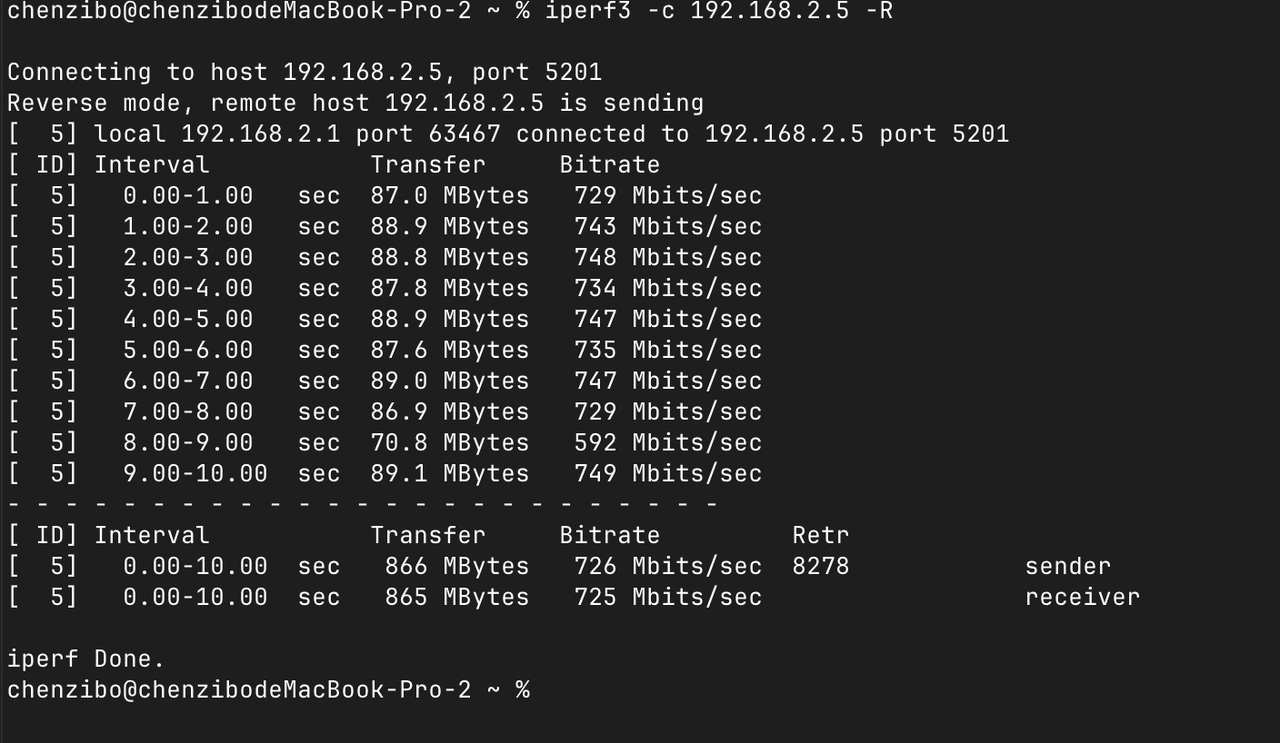
<server_ip>は iperf3 サーバーの IP アドレスです。クライアントはこのサーバーに接続して帯域幅テストを実行します。<bind_ip>は、テストトラフィックの送信元として指定したローカル IP アドレスをバインドします。-Rフラグはテスト方向を反転し、ダウンロード速度テストを行います。
M.2 Key E
M.2 Key E インターフェースは標準的な M.2 コネクタで、主に Wi-Fi や Bluetooth などの無線モジュールを接続し、無線通信機能を拡張するために使用されます。
ハードウェア接続
使用手順
ステップ 1. Wi-Fi ドライバーファームウェアをインストールします:
# Decompress firmware files
cd /lib/firmware/rtw88/
sudo zstd -d rtw8822c_fw.bin.zst -o rtw8822c_fw.bin
sudo zstd -d rtw8822c_wow_fw.bin.zst -o rtw8822c_wow_fw.bin
# Load the driver modules
sudo modprobe rtw88_core
sudo modprobe rtw88_pci
sudo modprobe rtw88_8822c
sudo modprobe rtw88_8822ce
ステップ 2. デバイスを再起動します:
sudo reboot
ステップ 3. 再起動後、無線インターフェースを有効化します:
sudo ip link set wlP1p1s0 up
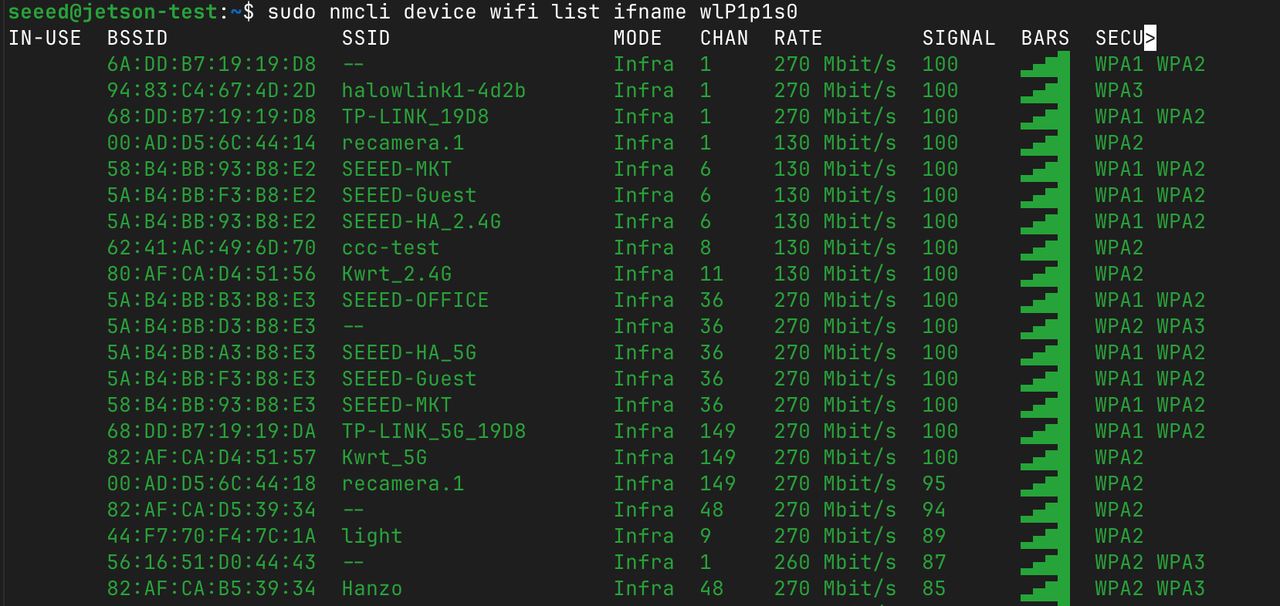
ステップ 4. 利用可能な Wi-Fi ネットワークをスキャンします:
sudo nmcli device wifi list ifname wlP1p1s0
ステップ 5. Wi-Fi ネットワークに接続します:
sudo nmcli device wifi connect "your WiFi name" password "WiFi password" ifname wlP1p1s0

Bluetooth
Bluetooth 機能は M.2 Key E スロット経由で利用できます。
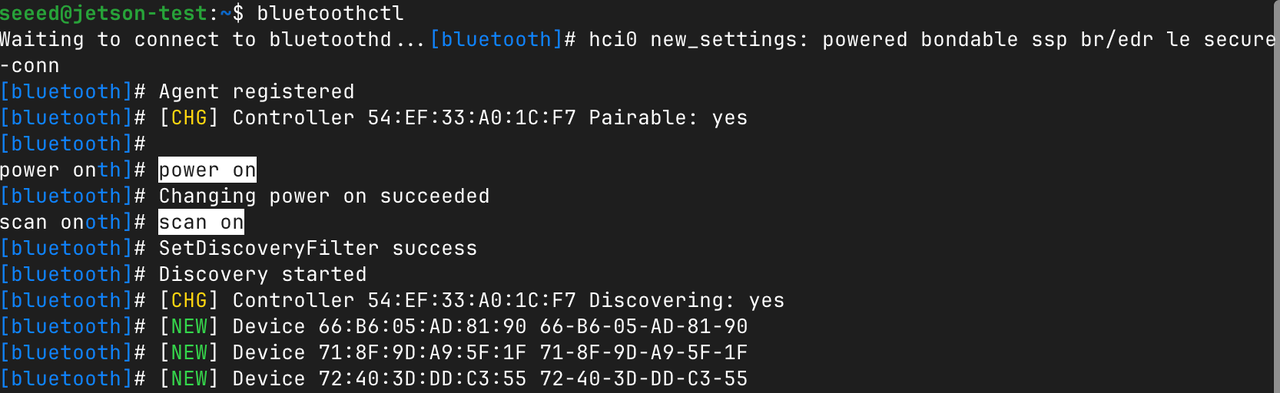
ステップ 1. Bluetooth 制御ツールを開きます:
bluetoothctl
ステップ 2. 電源をオンにして、近くの Bluetooth デバイスをスキャンします:
power on
scan on
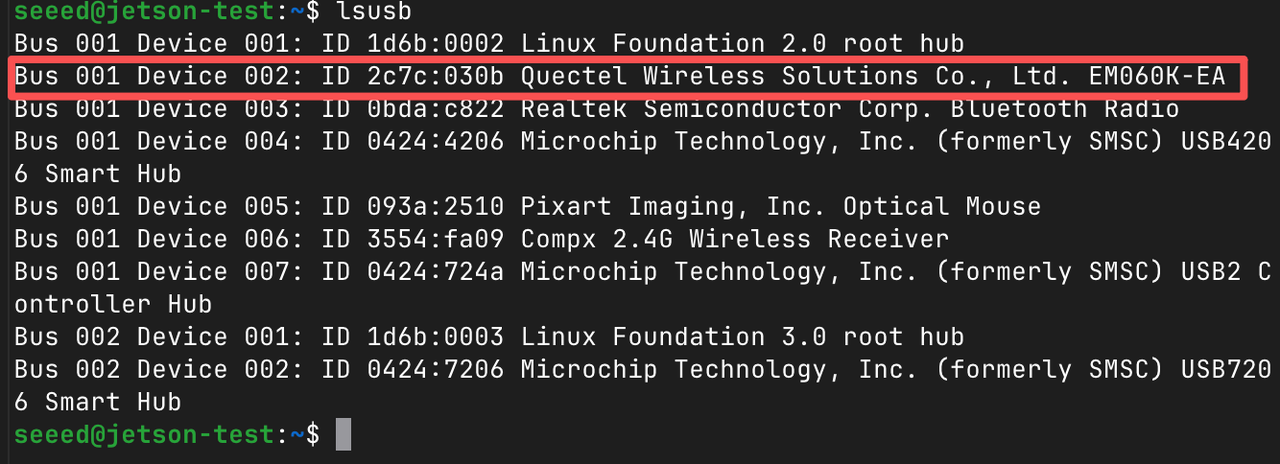
5G モジュール(M.2 Key B)
M.2 Key B スロットは 5G モジュール拡張をサポートしており、ロボティクスやエッジ AI のシナリオ向けに高速セルラー接続を実現します。
ハードウェア接続
5G モジュールを M.2 Key B スロットに装着し、アンテナを接続します。
使用手順
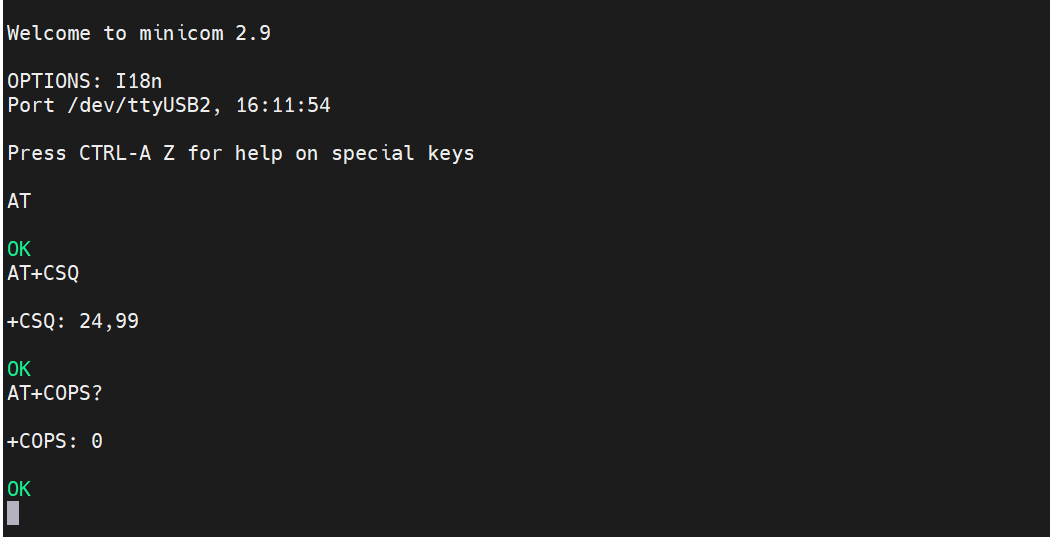
ステップ 1. 5G モジュールのシリアルコンソールを開きます:
sudo apt install -y minicom
sudo minicom -D /dev/ttyUSB3
ステップ 2. Ctrl+A を押してから E を押し、インタラクティブモードに入ります。
ステップ 3. AT コマンドをテストします:
AT
ステップ 4. 電波強度を確認します:
AT+CSQ
ステップ 5. 登録されているネットワークオペレーターを確認します:
AT+COPS?
Nano SIM
GPS
M.2 Key B スロット上の 5G モジュールは、位置情報トラッキング用の GPS 機能も提供します。
使用手順
ステップ 1. GPS AT コマンドポートを開きます:
sudo minicom -D /dev/ttyUSB2 -b 115200
ステップ 2. GPS 受信機を有効化します:
AT+QGPS=1
- 応答が
OKの場合、GPS 受信機は正常に起動しています。 - 応答が
+CME ERROR: 549の場合、GPS はすでに有効になっているため、再度有効化する必要はありません。
ステップ 3. Ctrl+A を押してから X を押し、Yes を選択して minicom を終了します。
ステップ 4. GPS が有効になると、衛星データは GPS データポート(通常は /dev/ttyUSB1)からストリーミングされます。生の NMEA データを読み取ります:
sudo cat /dev/ttyUSB1
標準的な GPS NMEA センテンスが次のように表示されるはずです:
$GPRMC,023011.00,A,2232.12345,N,11356.54321,E,0.026,,100626,,,A*7A
$GPGGA,023011.00,2232.12345,N,11356.54321,E,1,06,1.2,45.3,M,-2.3,M,,*6D
$GPGSV,3,1,11,01,65,120,42,03,45,210,38,08,30,045,35,11,15,290,31*74
GPS 信号を取得するために、空がよく見える場所にいることを確認してください。有効な測位が得られるまで数分かかる場合があります。
リソース
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます。私たちは、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じて選べる、複数のコミュニケーションチャネルをご用意しています。