CODESYSを使用してR1000のModbus rtu機能を設定する方法
はじめに
この記事では、主にCODESYSベースのreComputer R1000のmodbus rtu機能の使用方法を紹介します。reComputer R1000の2つのrs485ポートを使用し、1つのポートをModbusマスター用、もう1つのポートをModbusスレーブ用として使用します。この記事では、CODESYSでModbusマスターとModbusスレーブを設定する方法を詳しく説明し、それらをreComputer R1000にデプロイする方法を示します。
ハードウェアの準備
| reComputer R1000 |
|---|
 |
ソフトウェア準備
はじめに
開始する前に、reComputer R1000がホストと同じネットワークセグメントにあり、reComputer R1000にCODESYS run-timeがデプロイされていることを確認してください。CODESYS run-timeのデプロイ方法については、wikiを参照してください。
ハードウェア構成
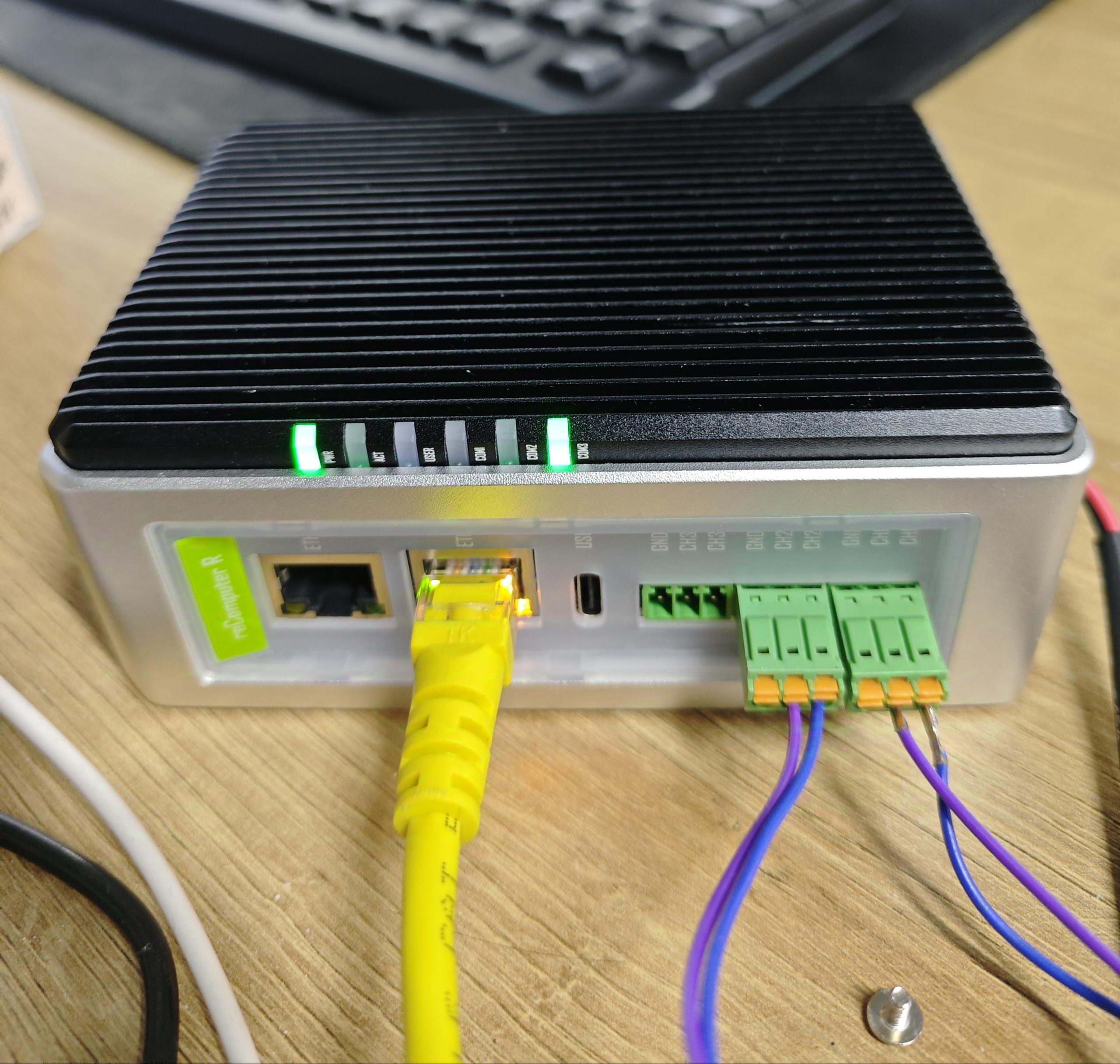
R1000の2つのRS485ポートを接続し、一方をModbusマスター、もう一方をModbusスレーブとして使用します。
R1000の設定ファイルを変更
次のコマンドを入力します:
sudo nano /etc/codesyscontrol/CODESYSControl.cfg
以下の内容を追加してください:
# Add the following content to the end of the file, where ttyAMAx is the serial port number of reComputer R1000. Linux.Devicefile.1~3 represents the serial port number in CODESYS. Here, the serial port number of CODESYS is bound to the serial port number of reComputer R1000, otherwise CODESYS cannot identify the correct serial port
[SysCom]
Linux.Devicefile.1=/dev/ttyAMAx
Linux.Devicefile.2=/dev/ttyAMAx
Linux.Devicefile.3=/dev/ttyAMAx
次に、以下のコマンドを入力してCODESYSサービスを再起動します:
sudo systemctl restart codesyscontrol.service
sudo systemctl restart codesysedge.service
Modbus マスター設定
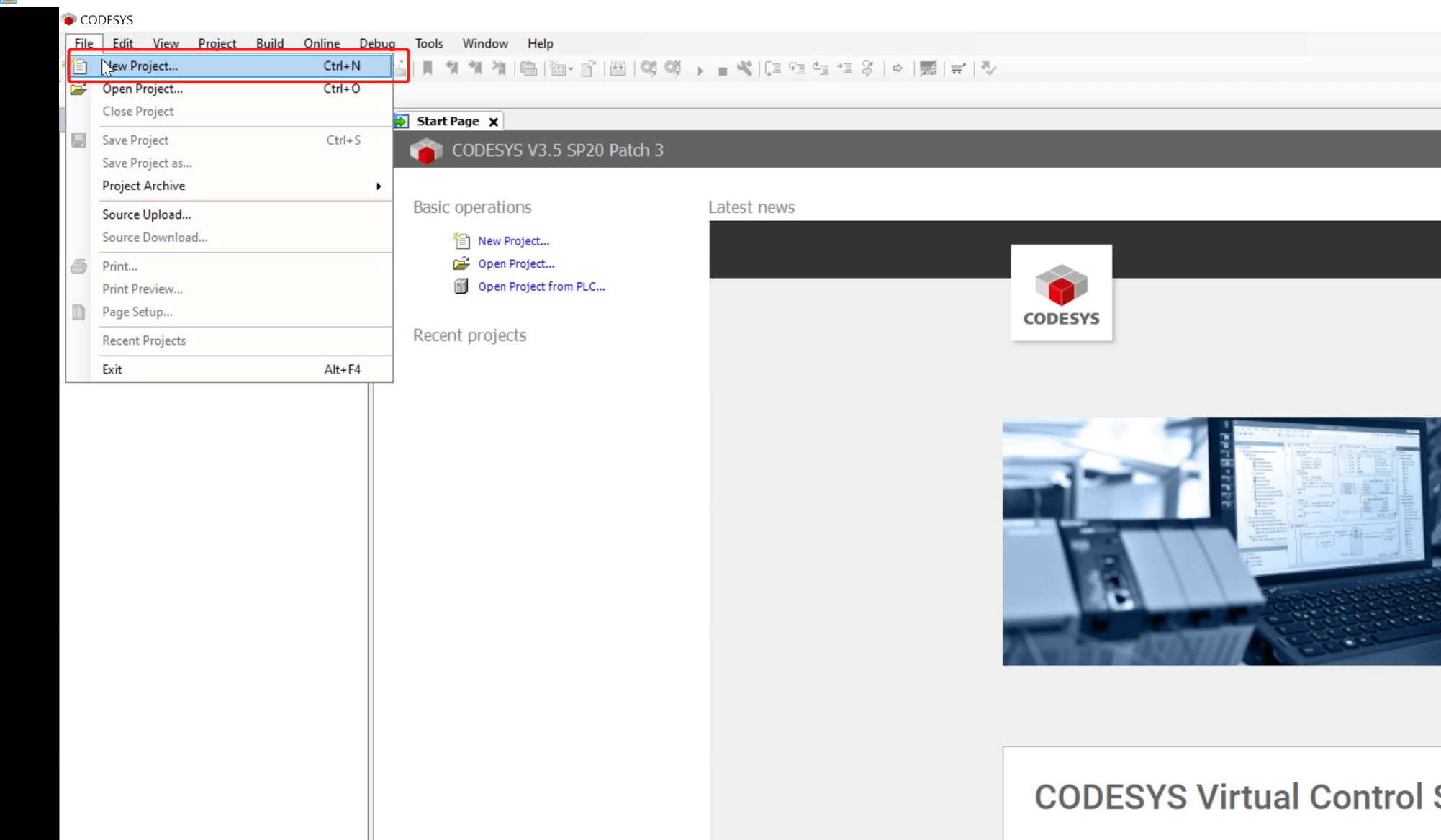
ステップ 1: CODESYSを開き、File--->NEW Projectをクリックして新しいプロジェクトを作成します
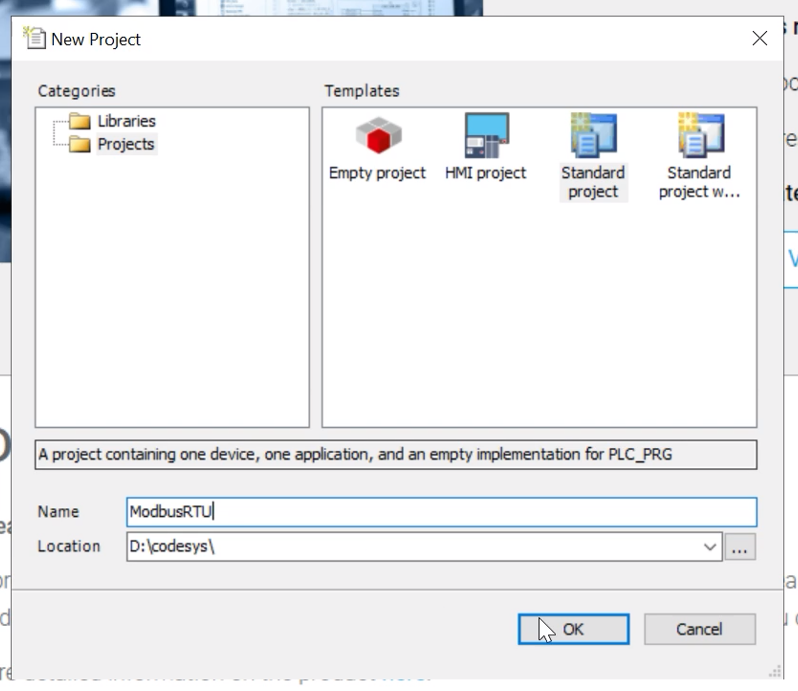
ステップ 2: プロジェクト名を入力し、Standard projectを選択して、OKをクリックします
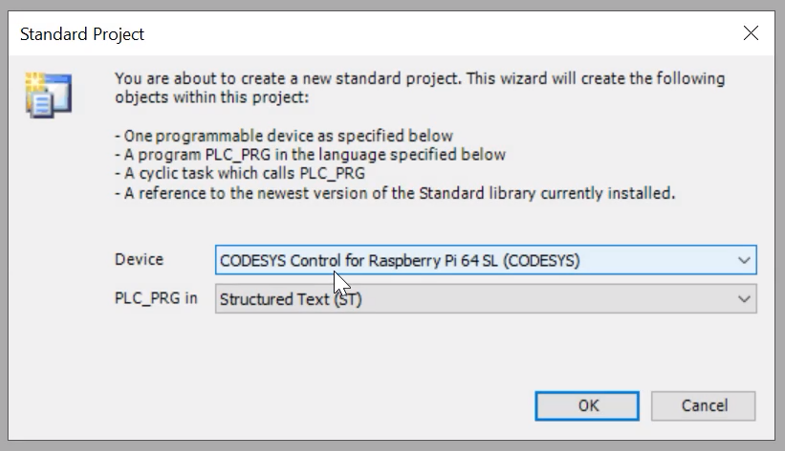
ステップ 3: Device列でCODESYS Control for Raspberry Pi 64 SL (CODESYS)を選択し、PLC_PRG inでStructured Text (ST)を選択して、OKをクリックします
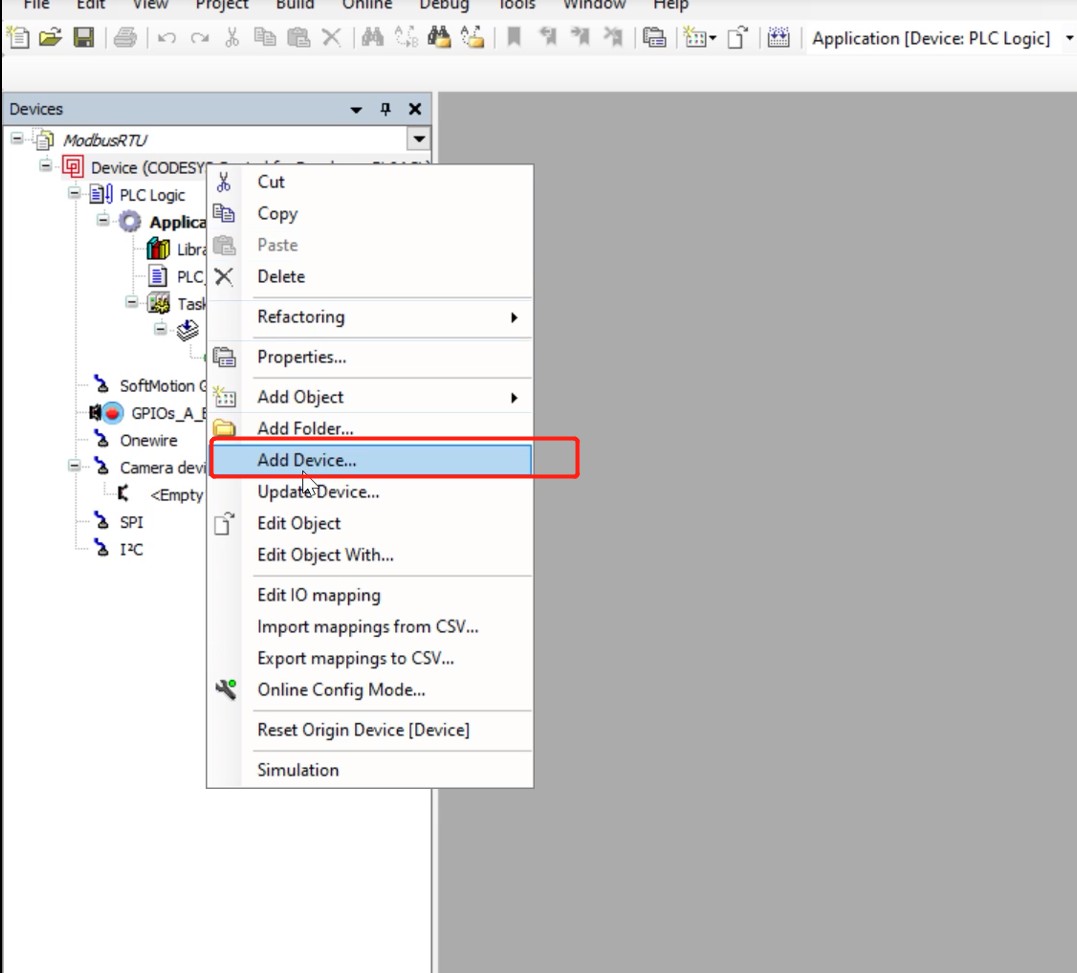
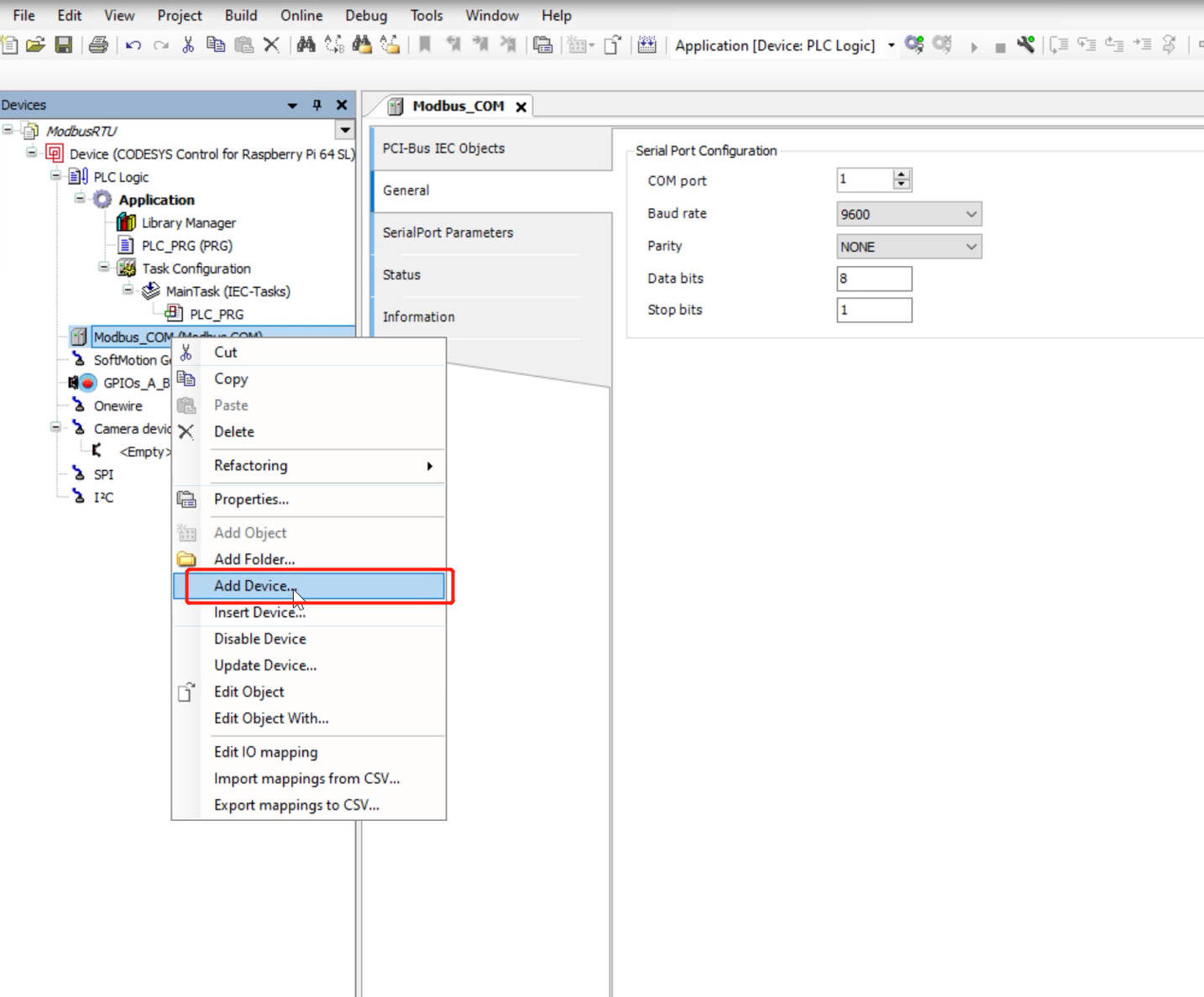
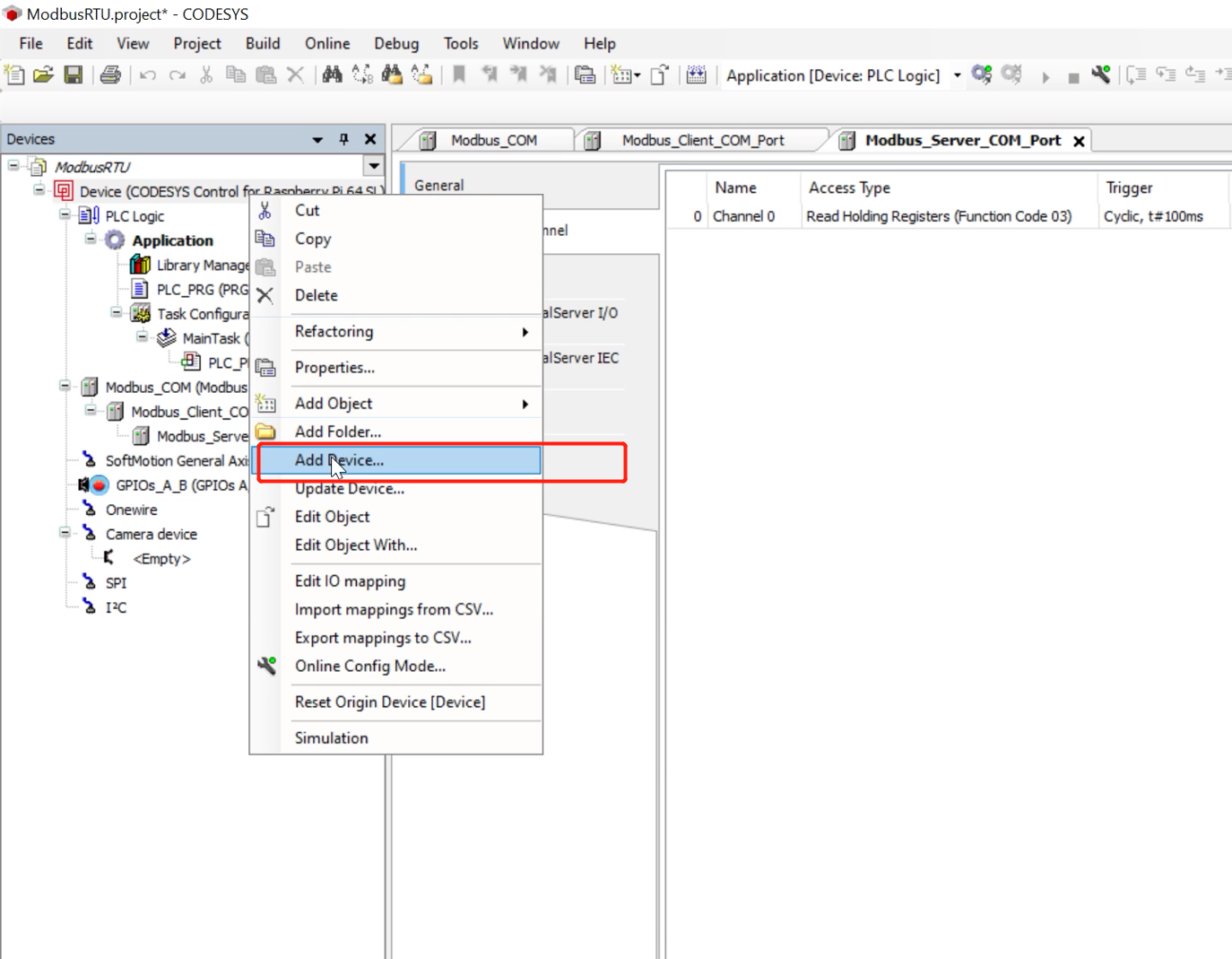
ステップ 4: プロジェクトを右クリックしてAdd Deviceを選択し、デバイスを追加します
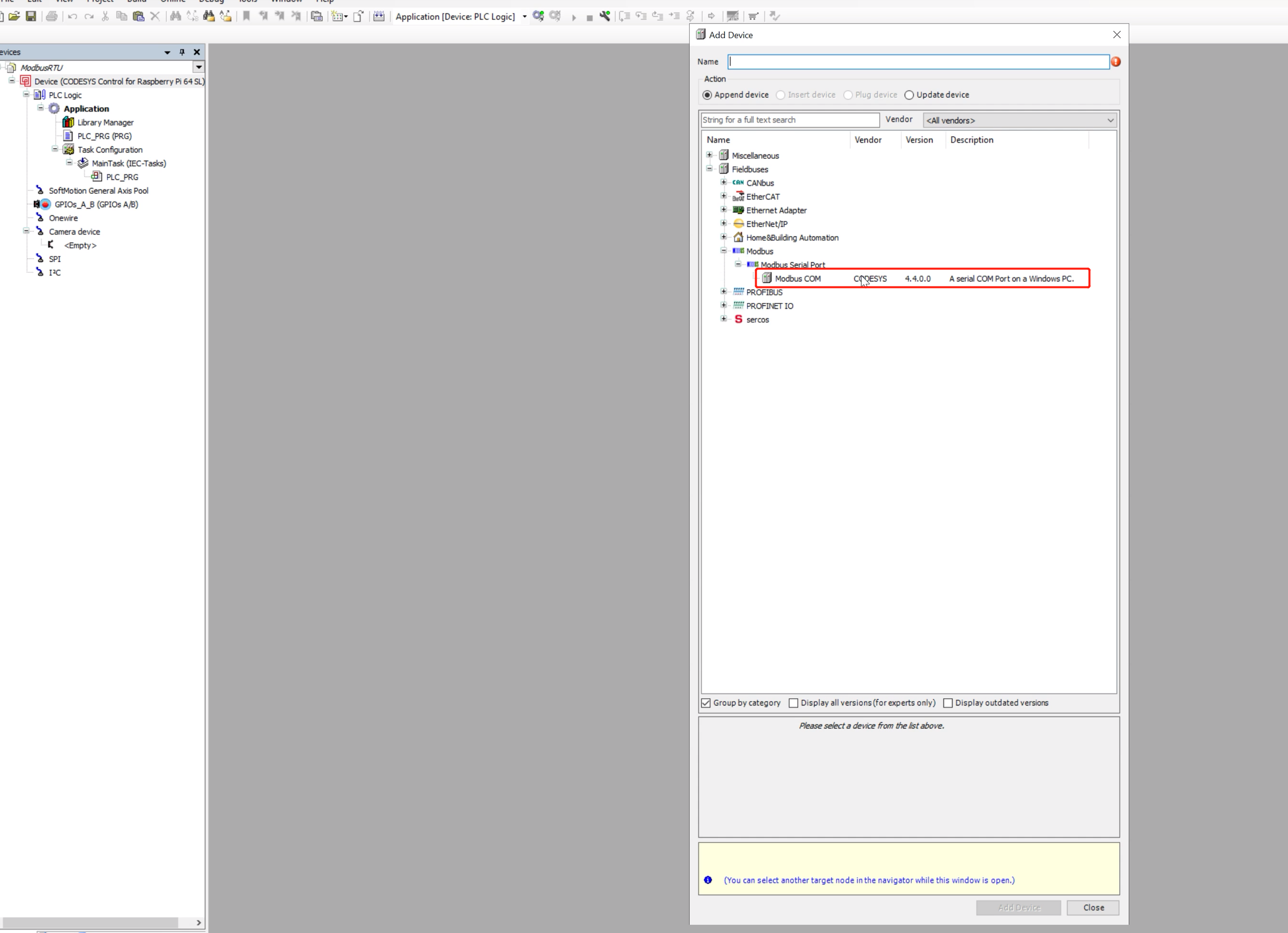
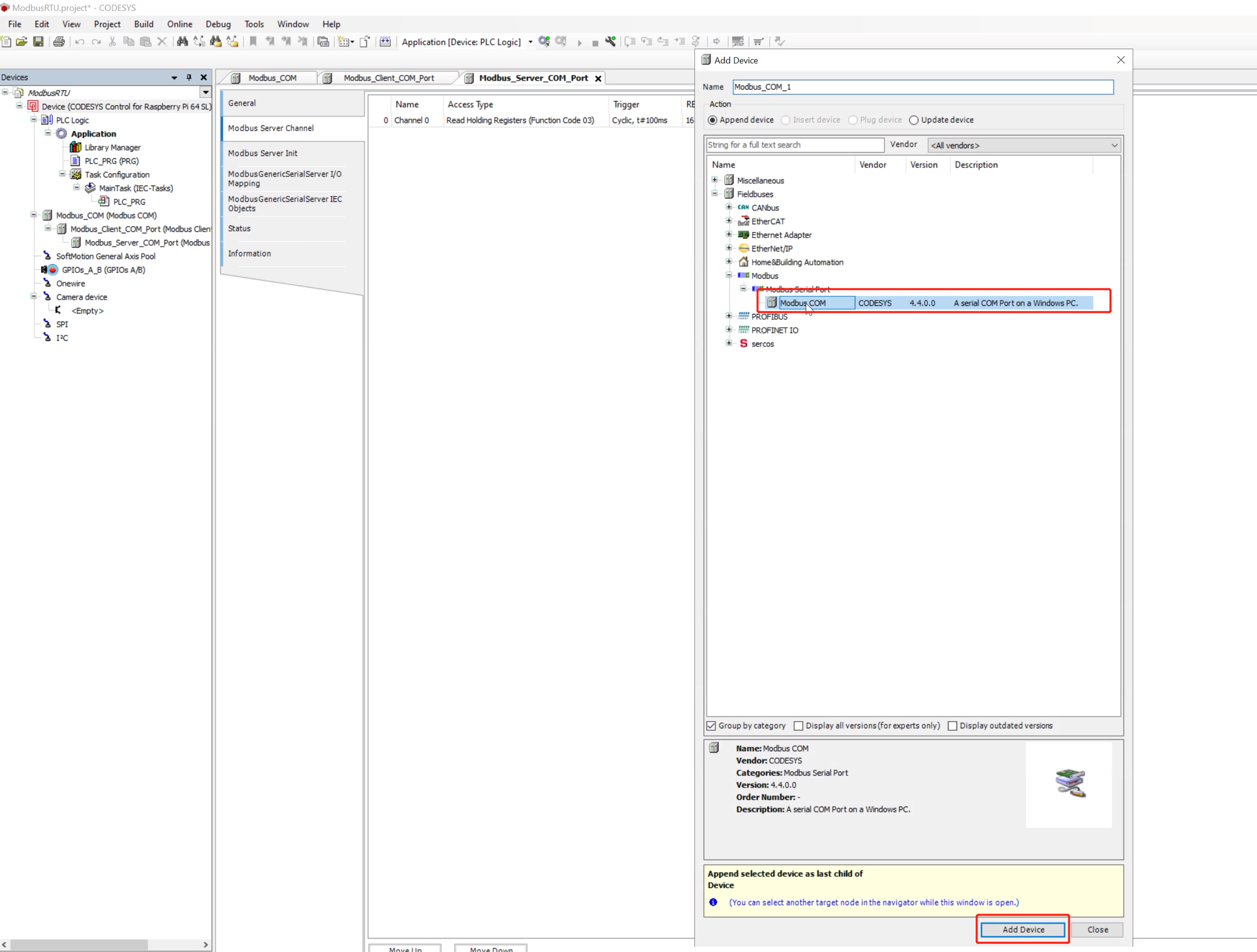
ステップ 5: Modbus--->Modbus serial Port--->Modbus COMをクリックして、Modbusシリアルポートデバイスを追加します
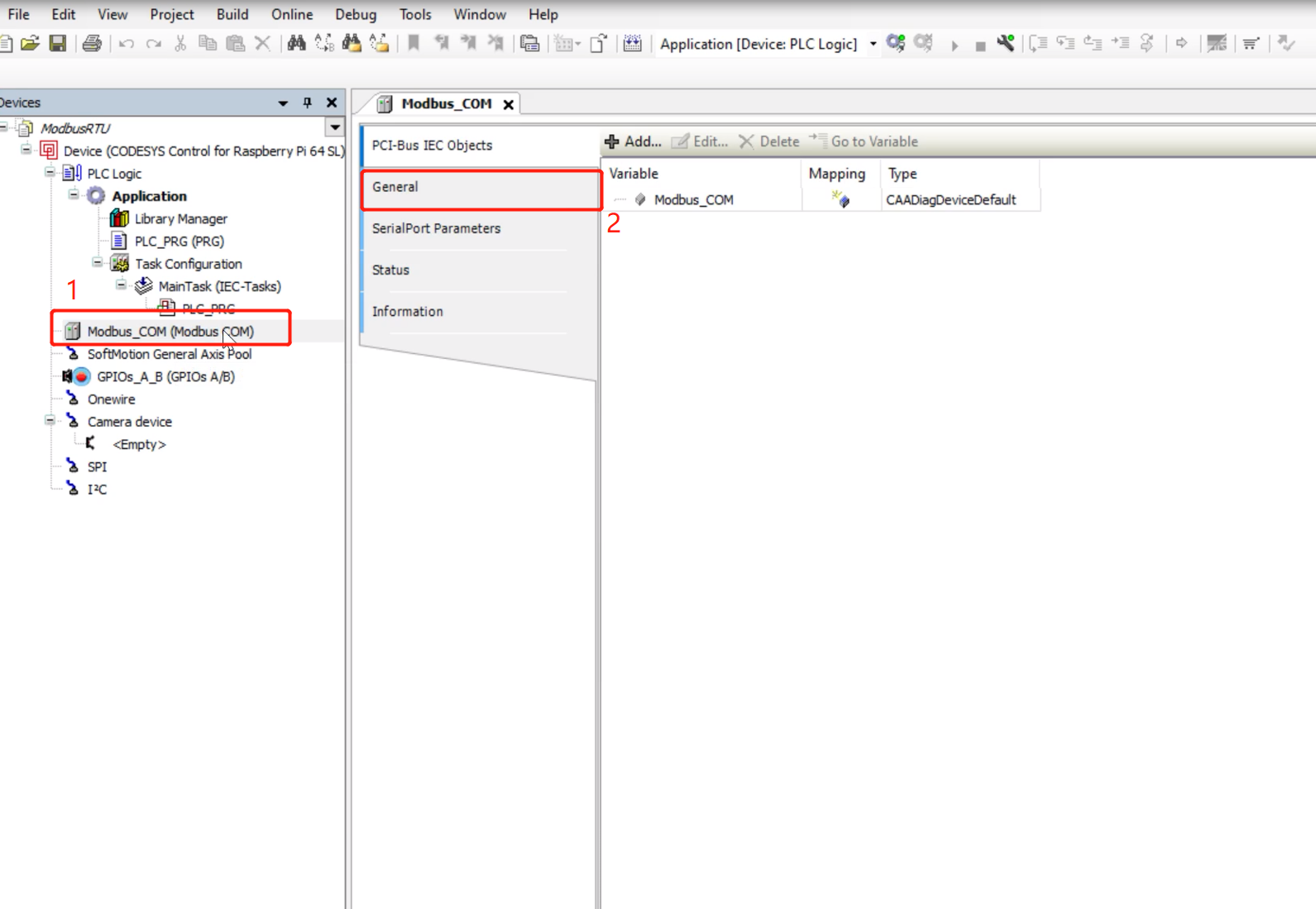
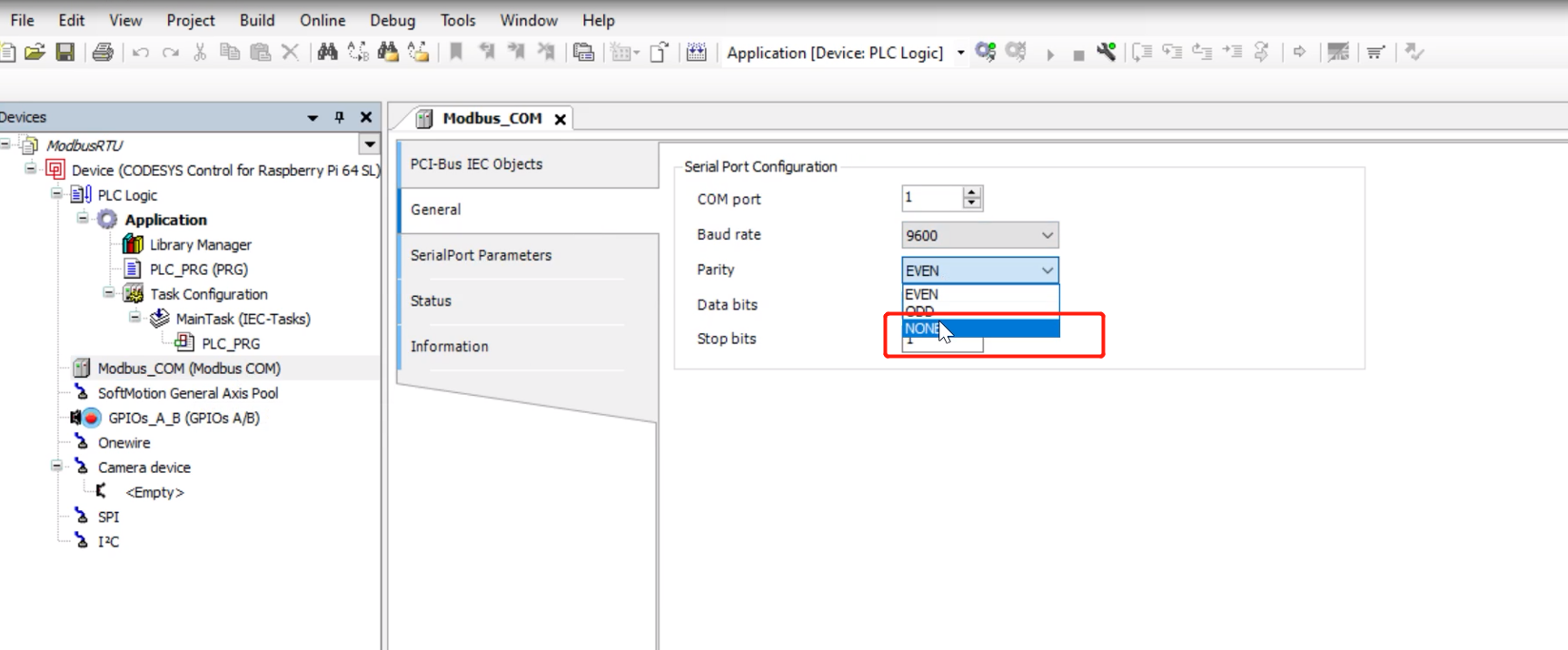
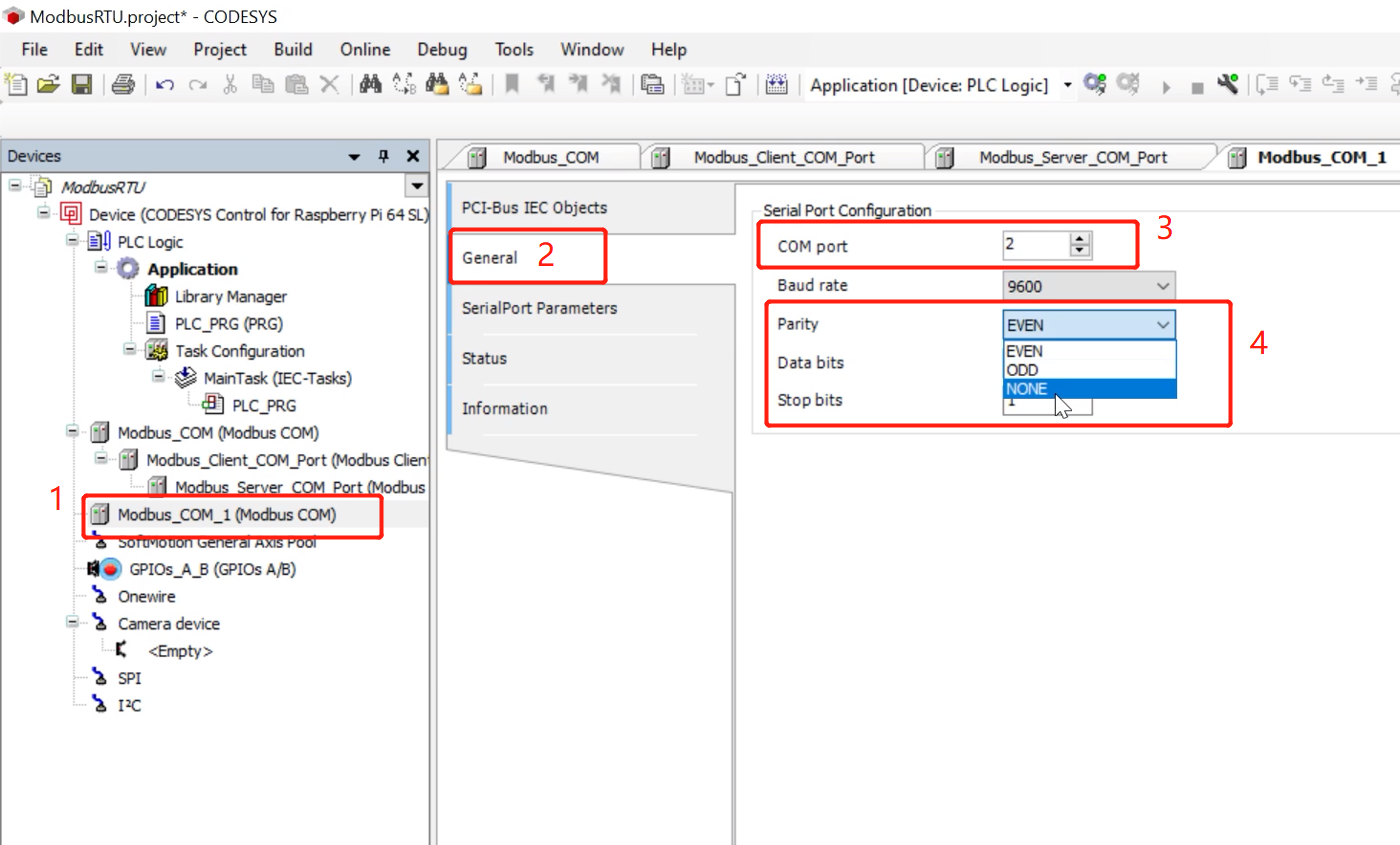
ステップ 6: 新しく追加されたModbus_COMをダブルクリックし、Generalをクリックすると、シリアルポート番号とボーレートなどの情報を設定できます
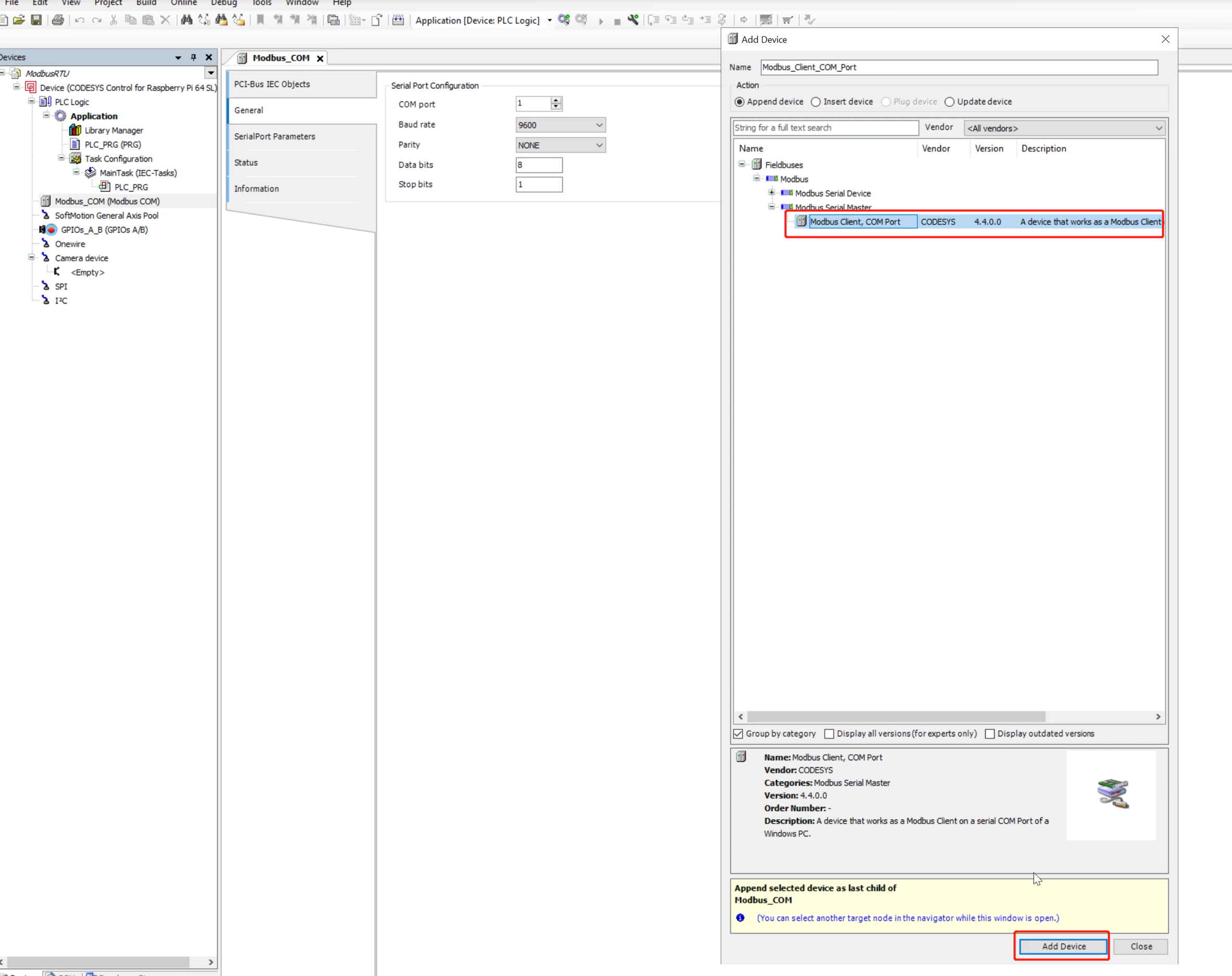
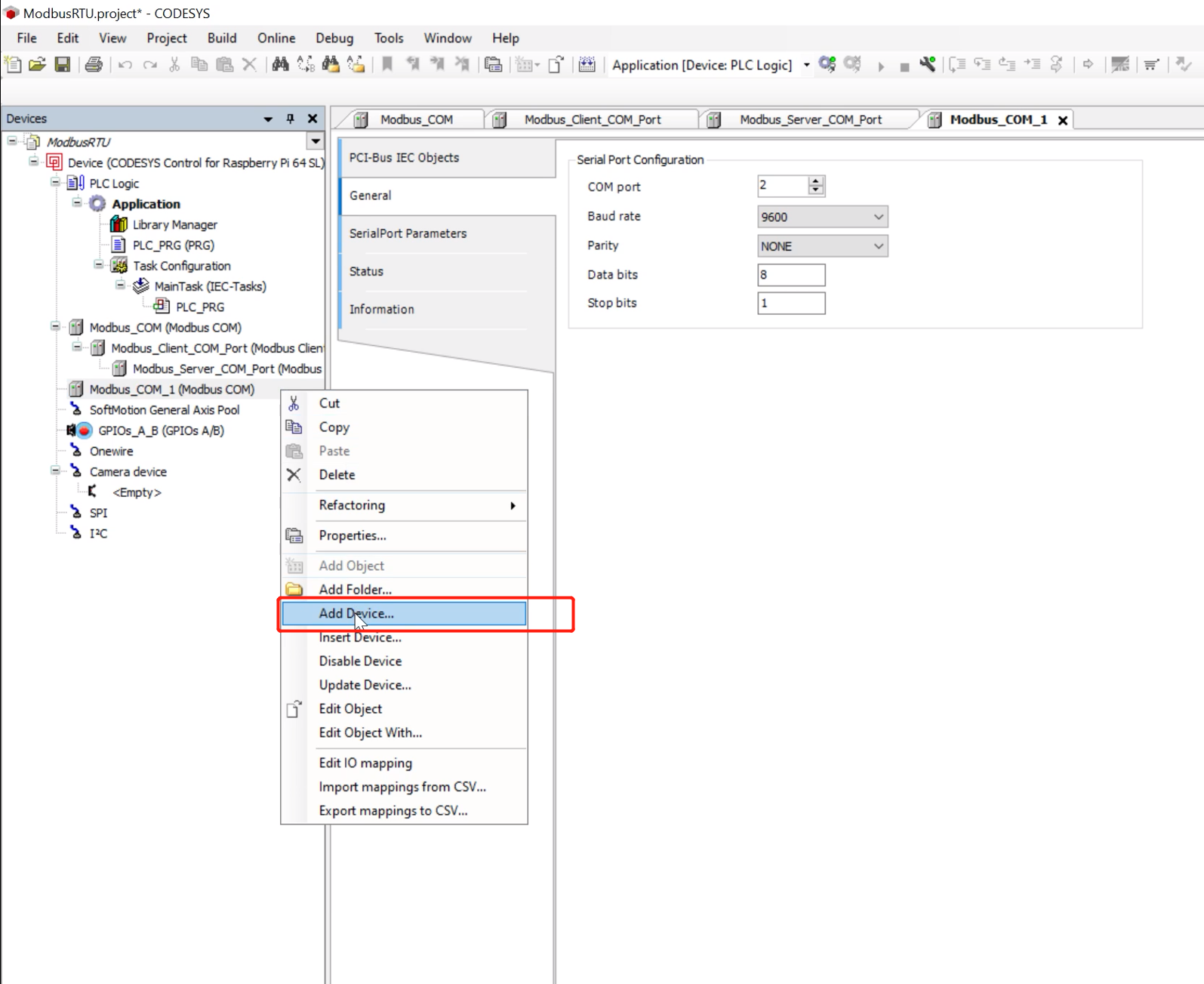
ステップ 7: Modbus_COMを右クリックしてAdd Deviceをクリックし、このポートにModbusデバイスを追加します
ステップ 8: Modbus Serial Master ---> Modbus Client, COM Portを選択して、このシリアルポートにModbusマスターデバイスをバインドします
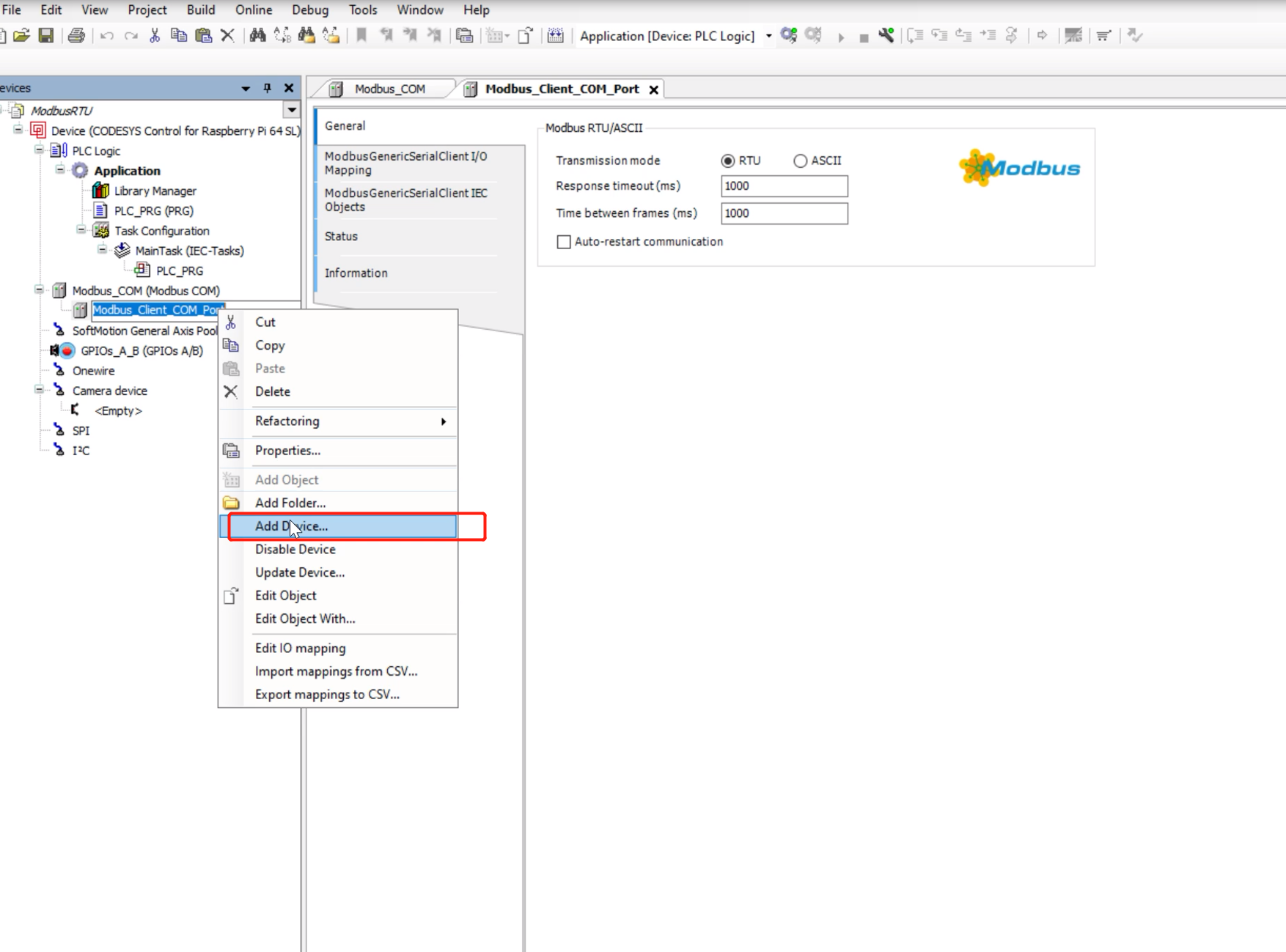
ステップ 9: Modbus_Clent_COM_Portを右クリックしてAdd Deviceを選択し、このModbusマスターが操作するスレーブデバイスを追加します。ここでは複数のスレーブデバイスを追加できます。ここのスレーブデバイスは、マスターステーションが操作したいスレーブデバイスを表します。後でマスターステーションがこれらのスレーブに対して実行する操作を設定する必要があります。
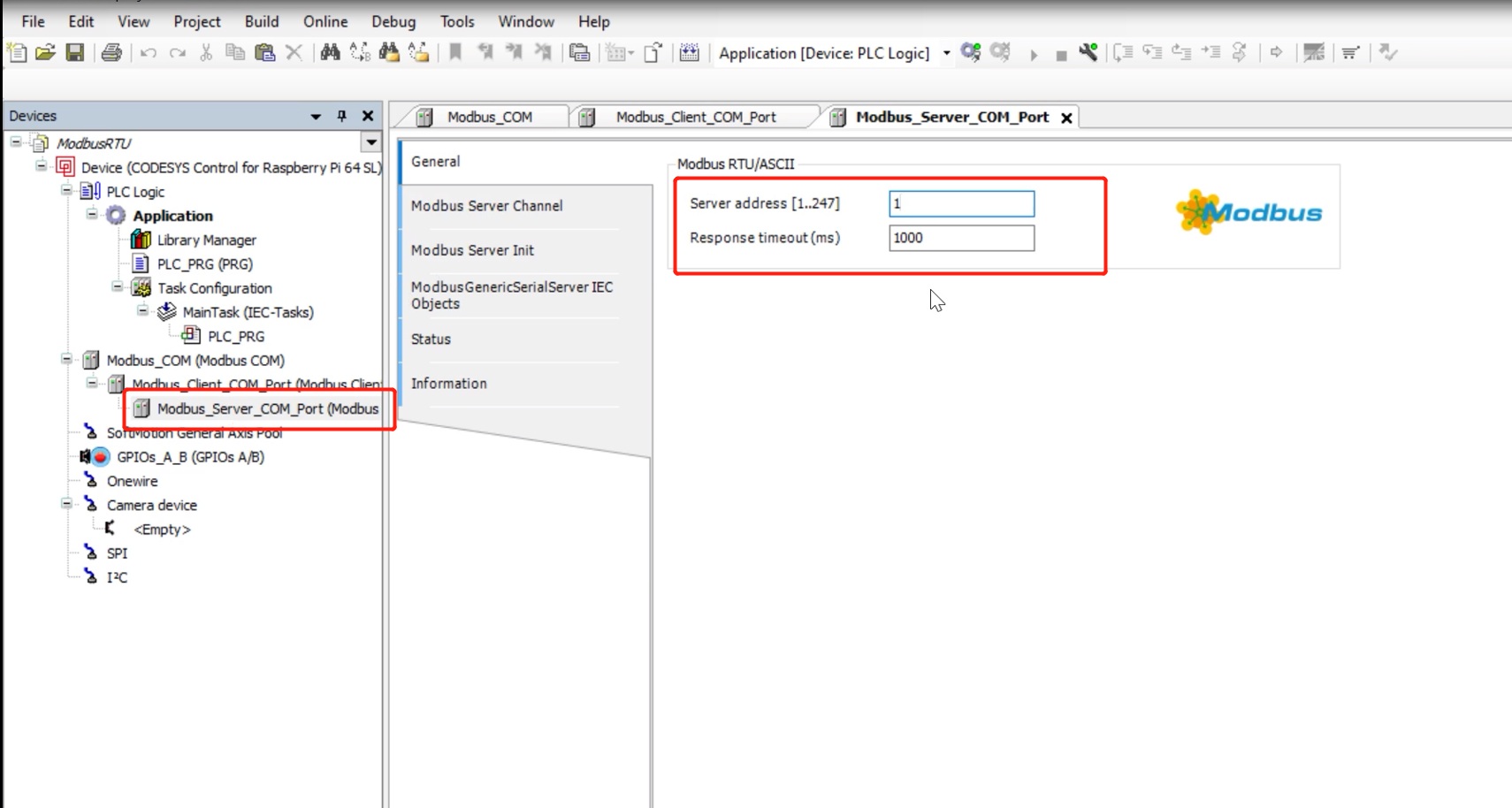
ステップ 10: Modbus Serial Slave ---> Modbus Server, COM Portを選択して、Modbusスレーブデバイスを追加します
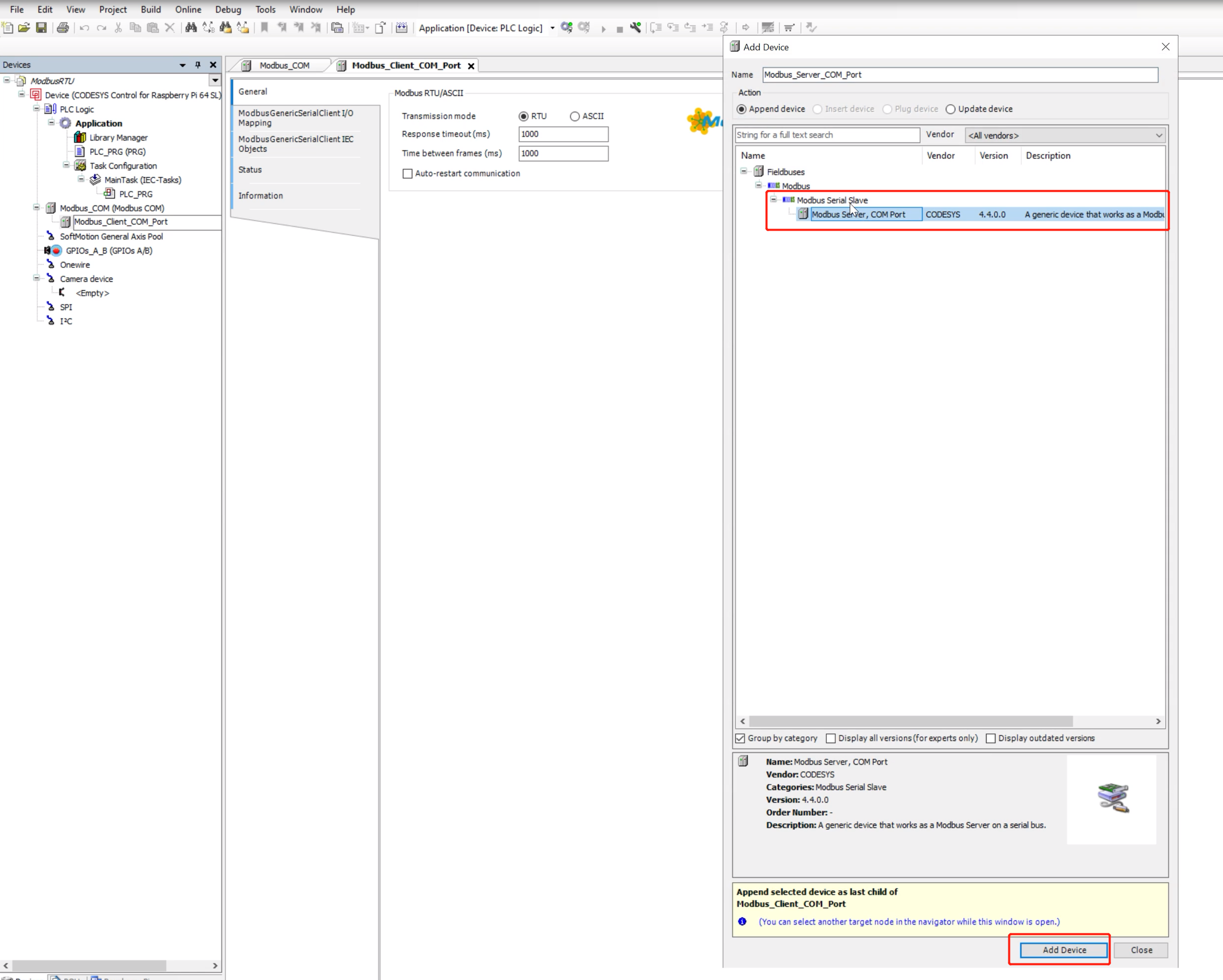
ステップ 11: 新しく追加されたスレーブデバイスをダブルクリックし、GeneralでServer addressとResponse timeoutプロパティを設定できます
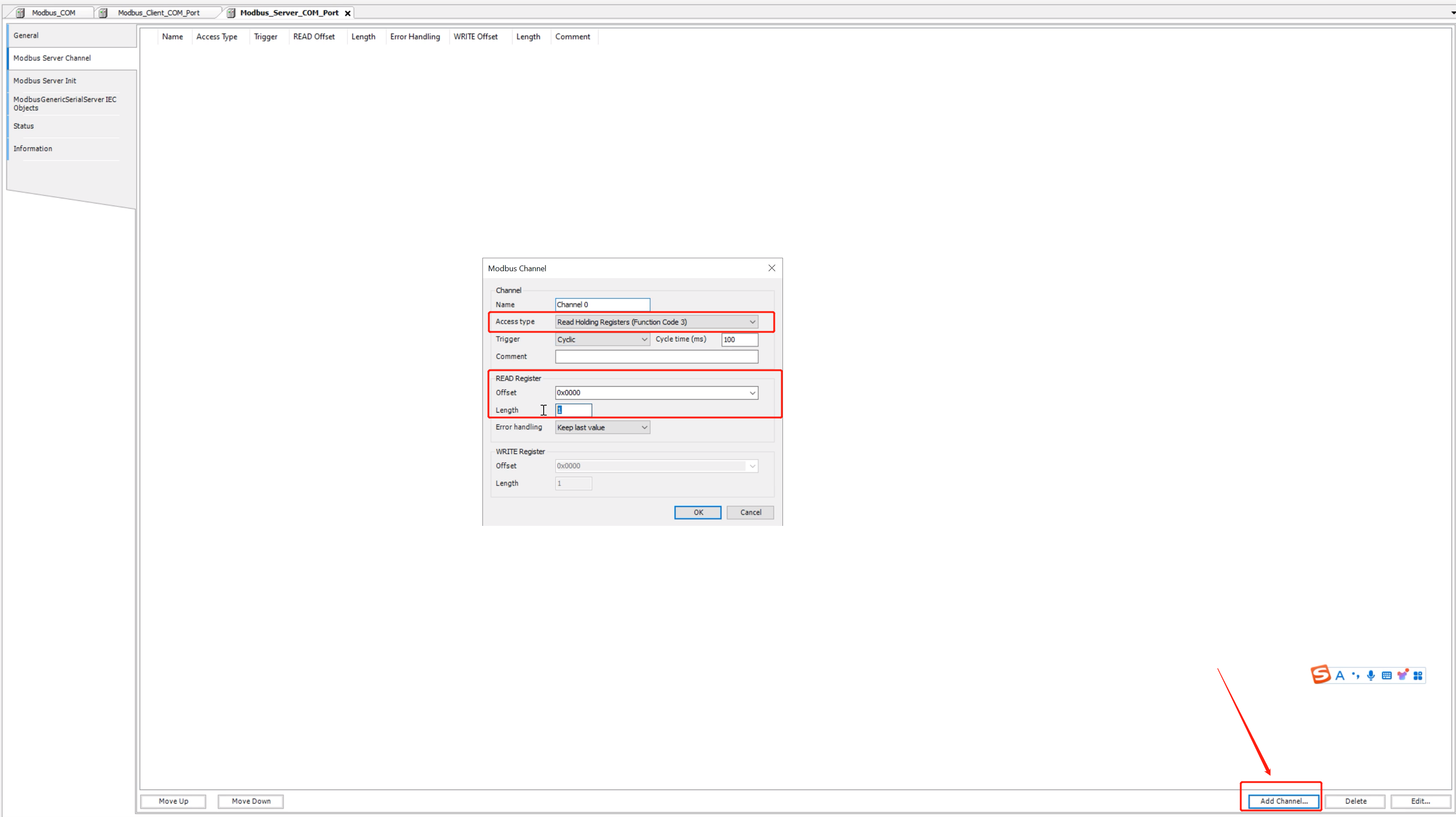
ステップ 12: Modbus Server Channelをクリックし、右下のAdd Channelをクリックして、マスターステーションがスレーブステーションに対して実行する操作を設定します。例えば、ファンクションコードの選択、操作するレジスタ数などです。Add Channelをクリックして複数の操作を追加できます
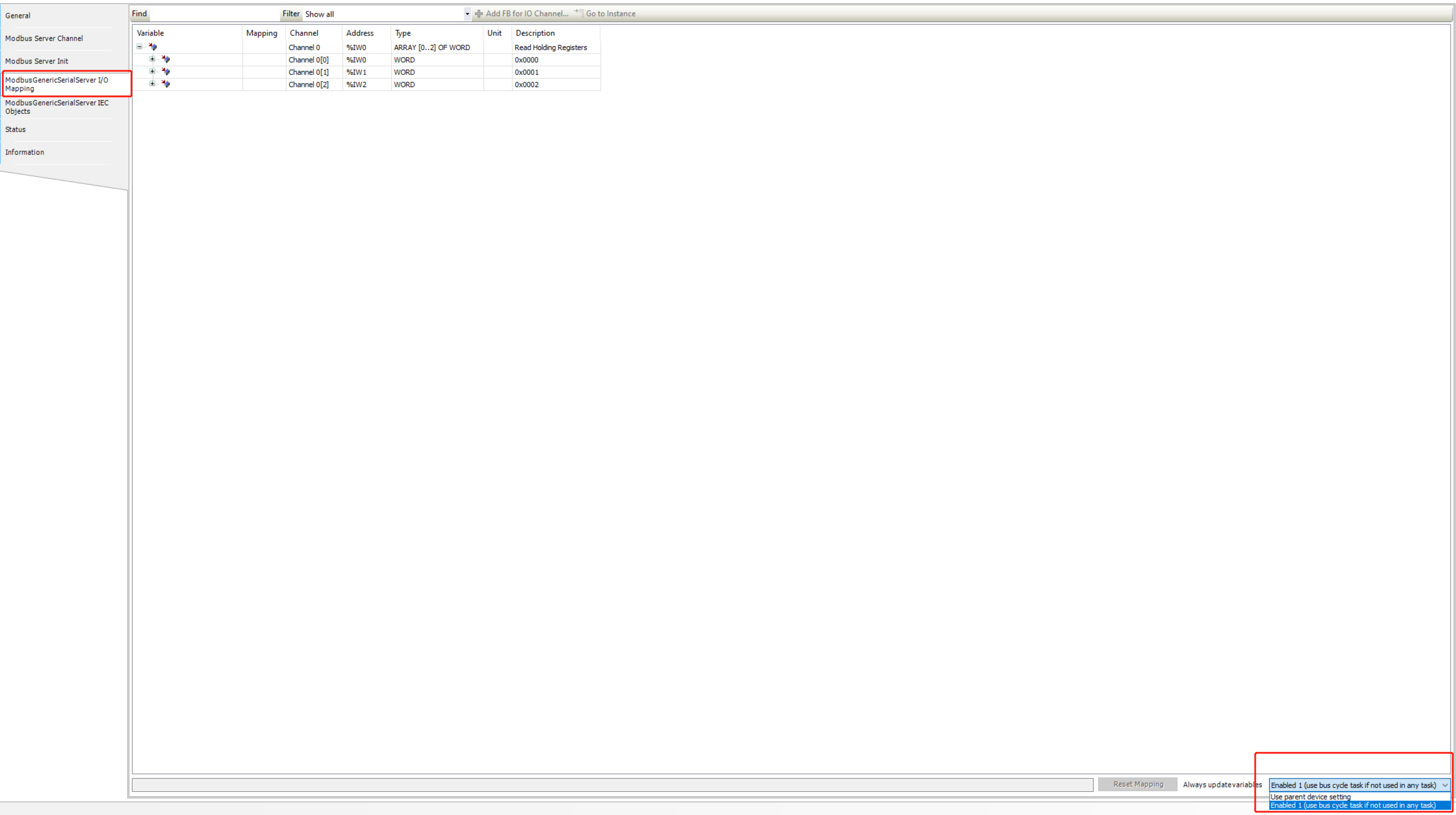
ステップ 13: ModbusGenericSerialServer I/O Mappingをクリックします。ここでデータを指定された変数にマップでき、右下のAlways update variables列でEnable 1を選択します。これでModbusマスターの設定が完了しました。
Modbus スレーブ設定
ステップ 1: プロジェクトを右クリックしてAdd Deviceを選択し、デバイスを追加します
ステップ 2: Modbus ---> Modbus Serial Port ---> Modbus COMを選択して、Modbusシリアルポートを追加します
ステップ 3: 新しく追加されたModbusシリアルポートをクリックし、Generalを選択して、シリアルポート番号、ボーレートなどの情報を設定します
ステップ 4: 新しく追加されたModbusシリアルポートを右クリックし、Add Deviceを選択して、Modbusスレーブデバイスを追加します
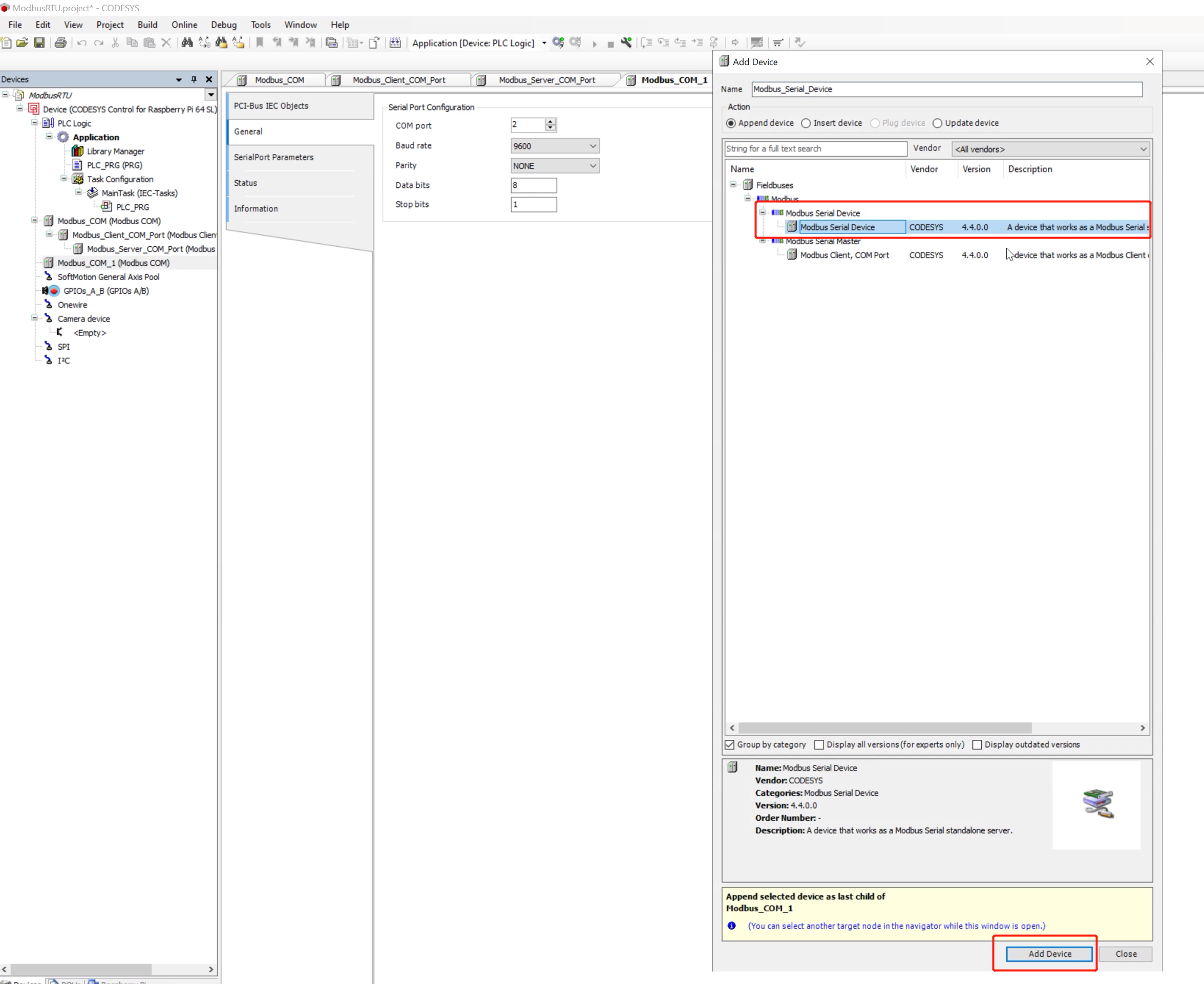
ステップ 5: Modbus ---> Modbus Serial Device ---> Modbus Serial Deviceを選択して、スレーブデバイスを追加します
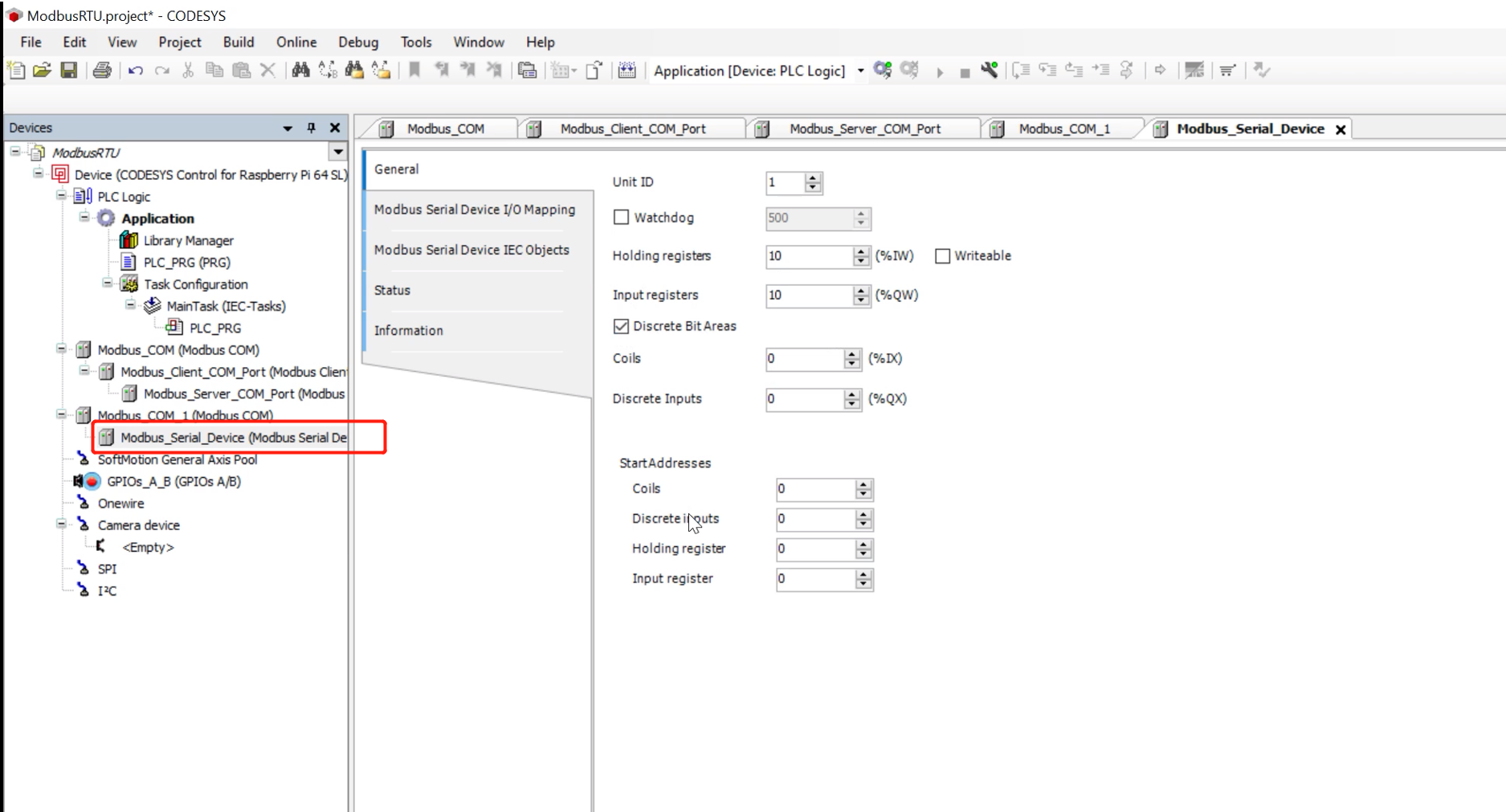
ステップ 6: 新しく追加されたスレーブデバイスをダブルクリックします。Generalで、このスレーブのプロパティ(レジスタとコイルの数、アドレスなど)を設定できます。
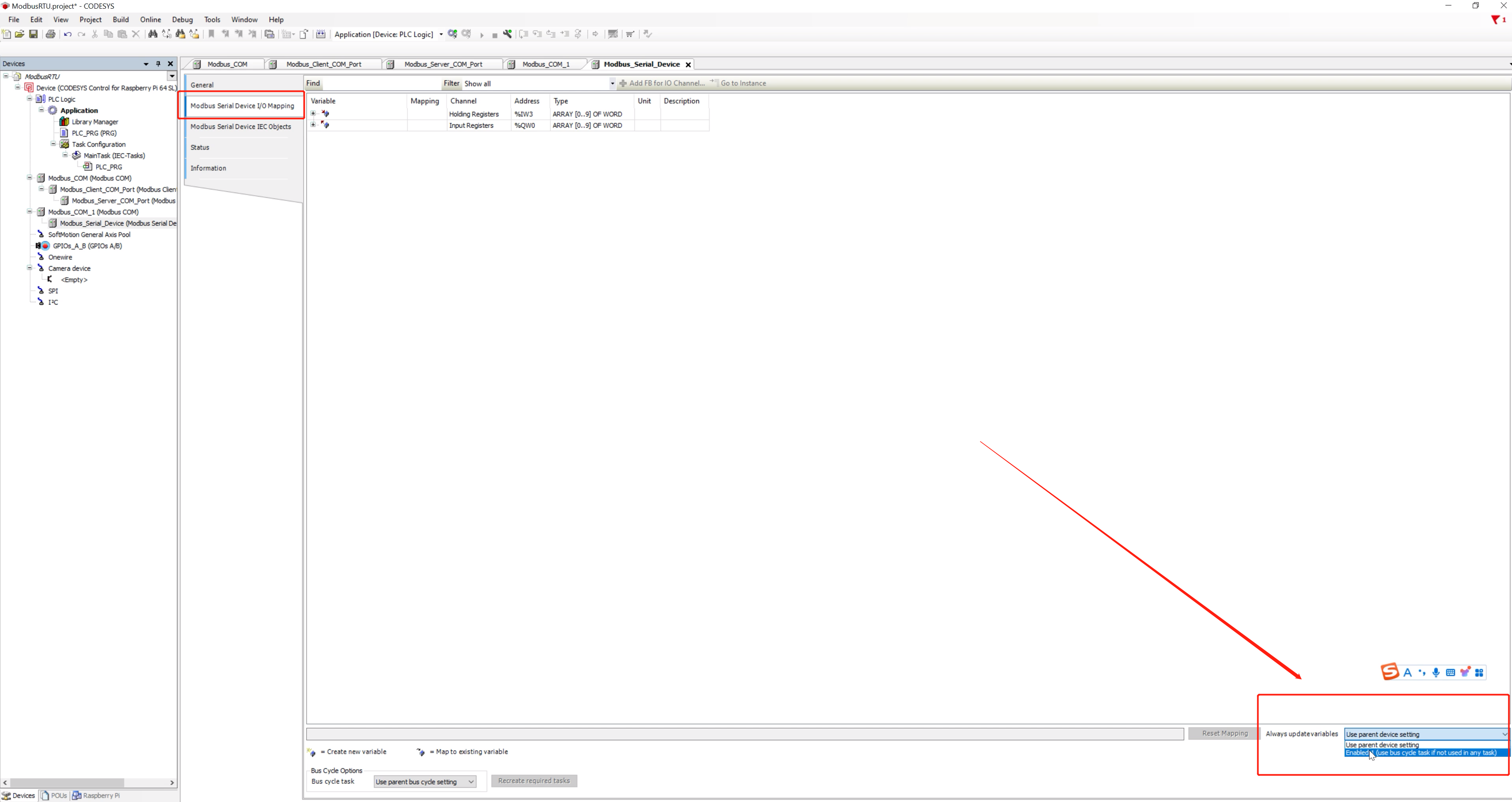
ステップ 7: Modbus Serial Device I/O Mappingをクリックし、右下のAlways update variableでEnable 1を選択します。これでModbusスレーブの設定が完了しました
Modbus デプロイメント
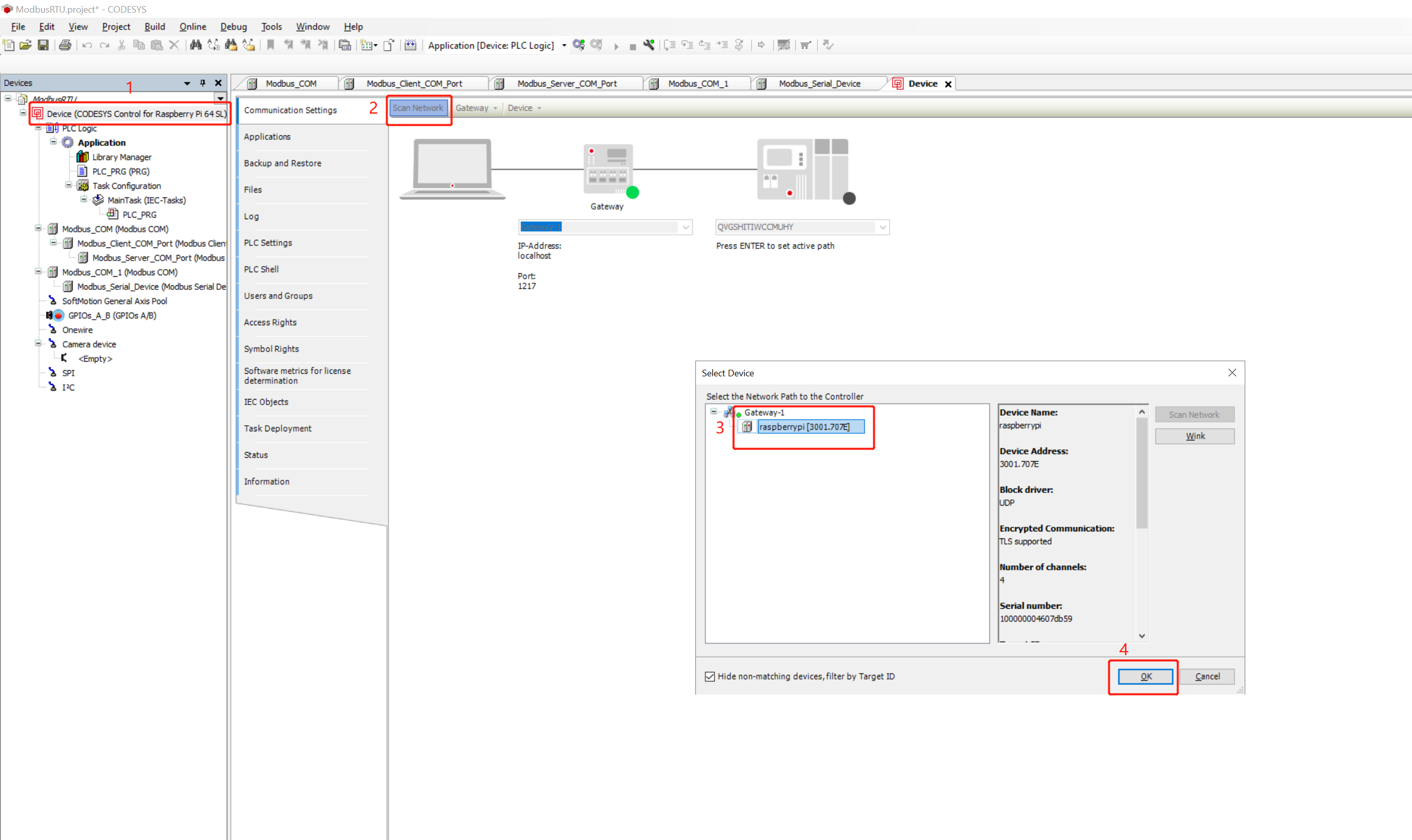
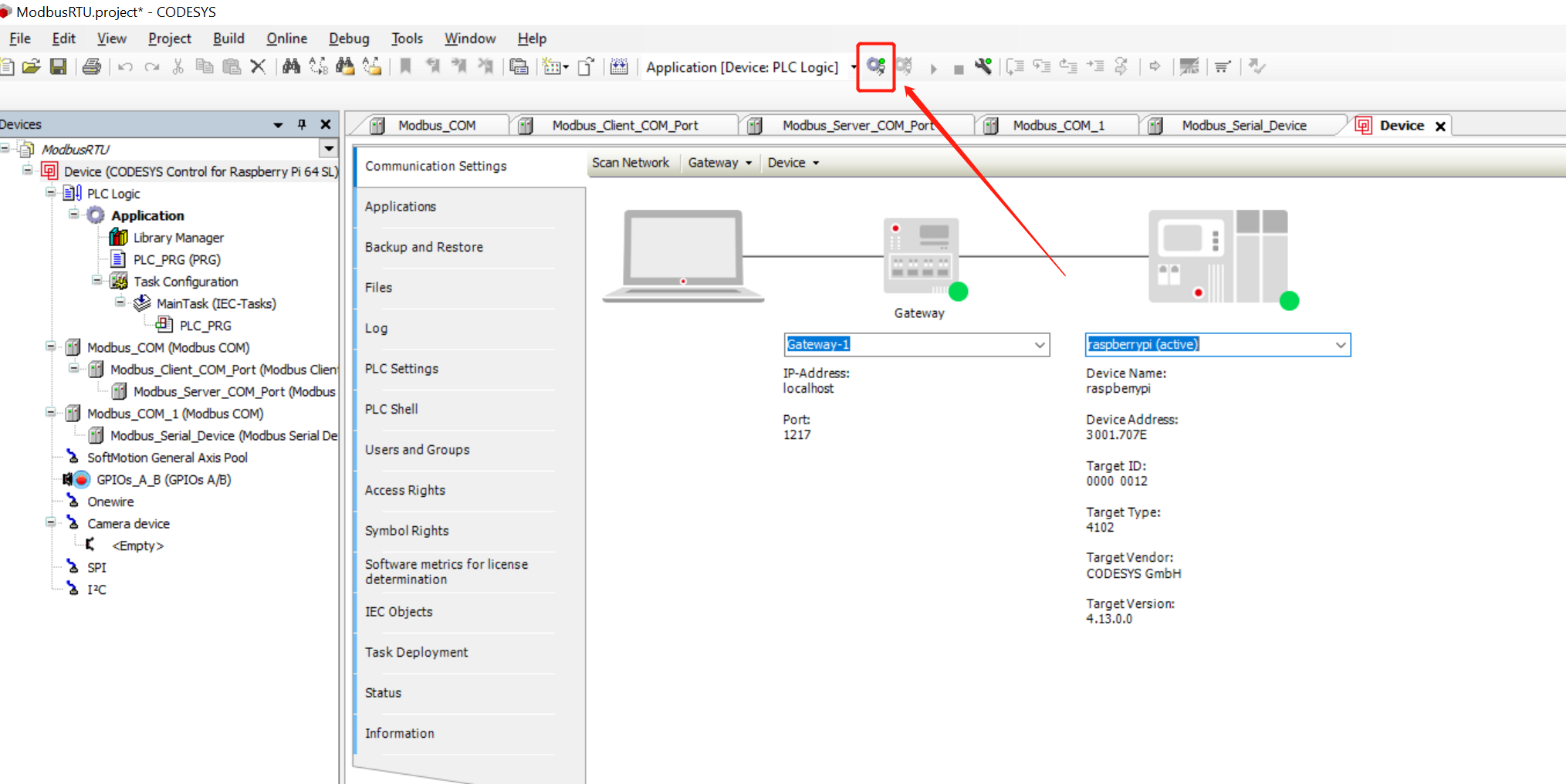
ステップ 1: プロジェクトをダブルクリックし、Scan Networkをクリックして、デバイスを選択し、OKをクリックします
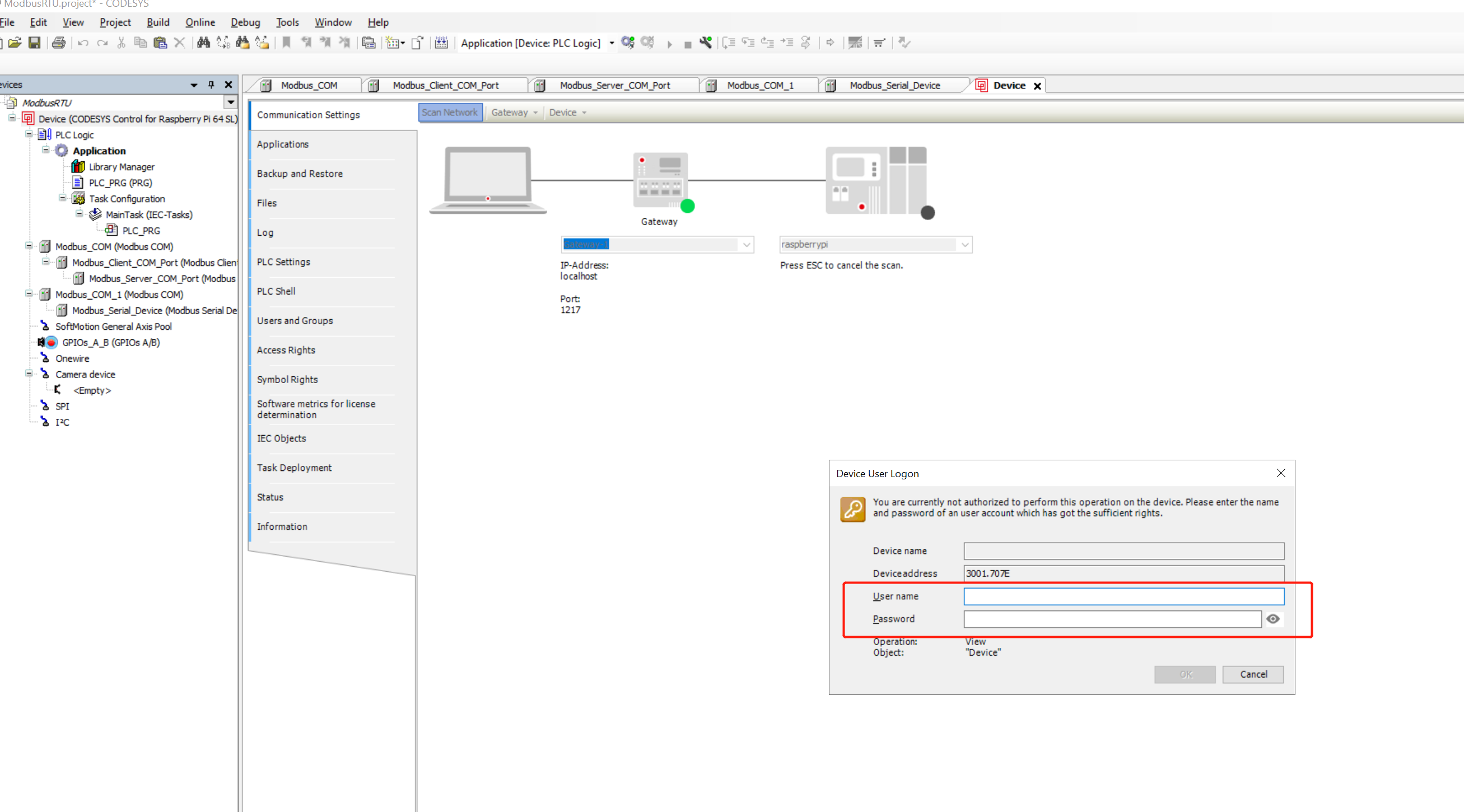
ステップ 2: reComputer R1000のユーザー名とパスワードを入力してデバイスに接続します
ステップ 3: 図に示すボタンをクリックして、プロジェクトをreComputer R1000にデプロイします
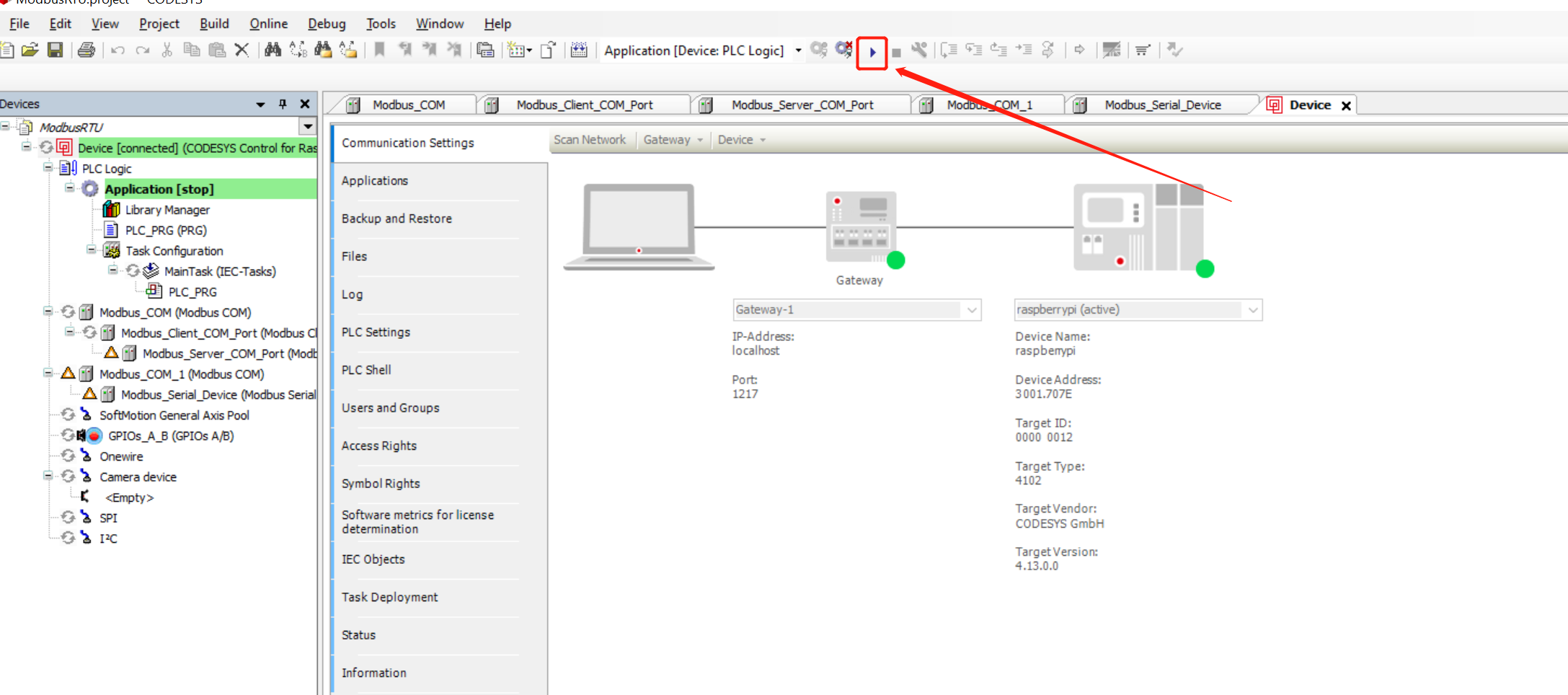
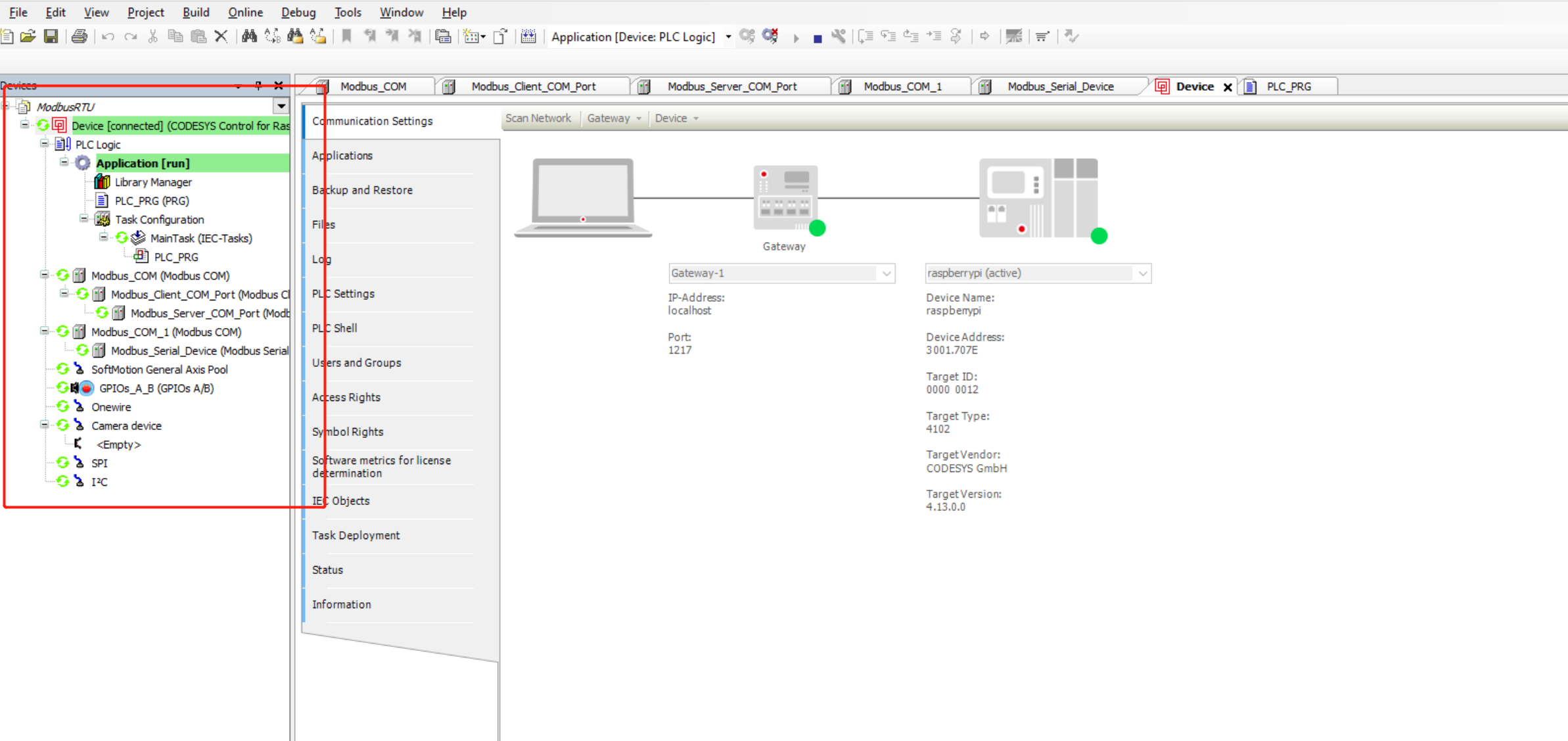
ステップ 4: Startボタンをクリックしてプロジェクトを開始します。Modbusマスターとスレーブの両方のインジケーターライトが緑色になっていることが確認でき、これはModbus通信が正常であることを示しています
技術サポート & 製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。