reComputer R1000でrs485とmodbusを使用する方法
はじめに
この記事では主にreComputer R1000の485通信機能の使用方法を紹介し、RS485とModbus通信機能をテストします。
開始
このプロジェクトを開始する前に、ここで説明されているようにハードウェアとソフトウェアを事前に準備する必要があります。
ハードウェアの準備
| reComputer R1000 |
|---|
 |
ソフトウェア
- W10 PC で modbus poll を使用します。他の modbus テストツールも使用できます
- reComputer R1000 と W10 PC で modbusmechanic を使用します。他の modbus テストツールも使用できます
- W10 PC で mobaxterm を使用します。他のシリアルポートテストツールも使用できます
- reComputer R1000 で以下のコマンドを使用して minicom ツールをダウンロードする必要があります:
sudo apt-get install minicom
ハードウェア構成
このテストでは、RS485 to USBモジュールを使用してreComputer R1000とW10 PCを接続します。
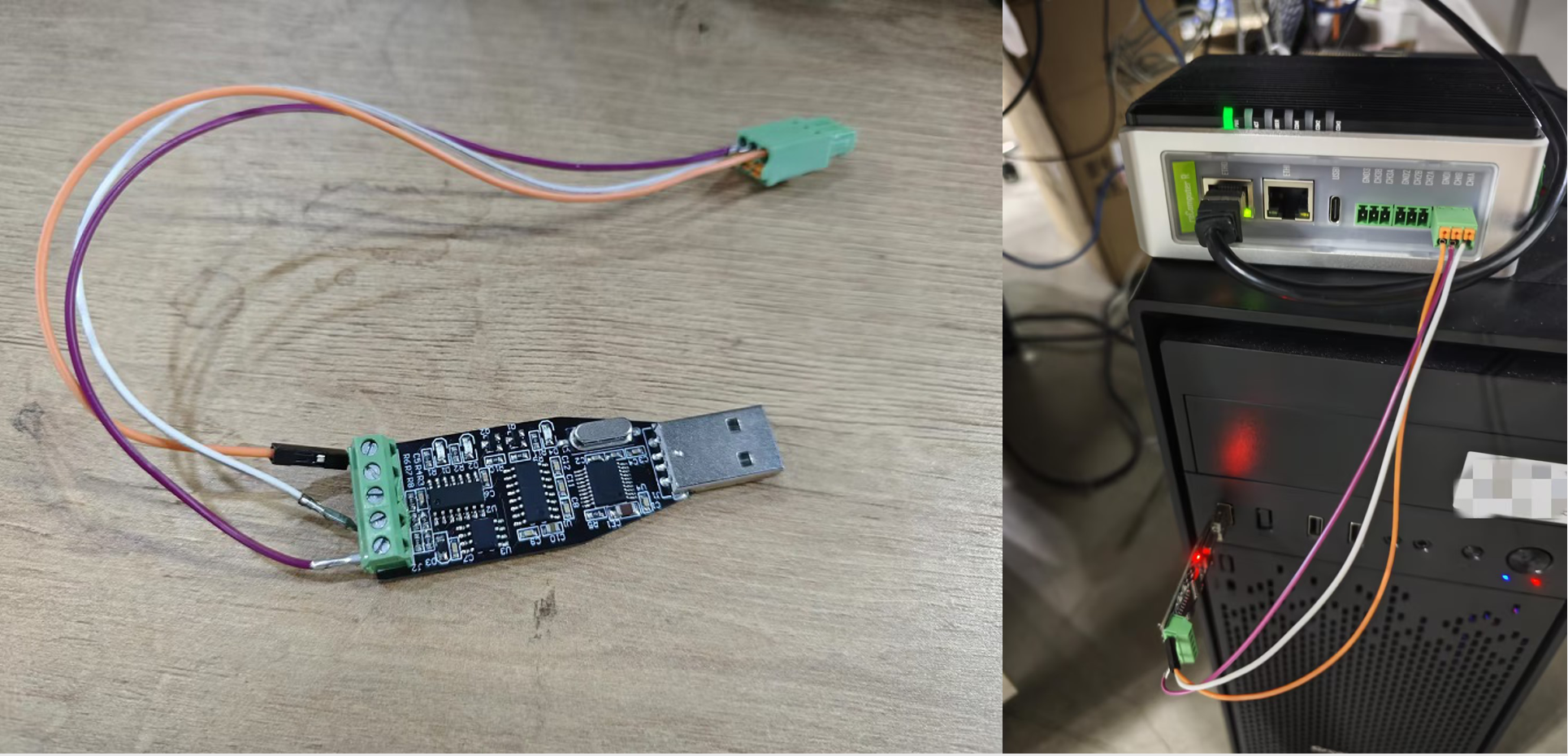
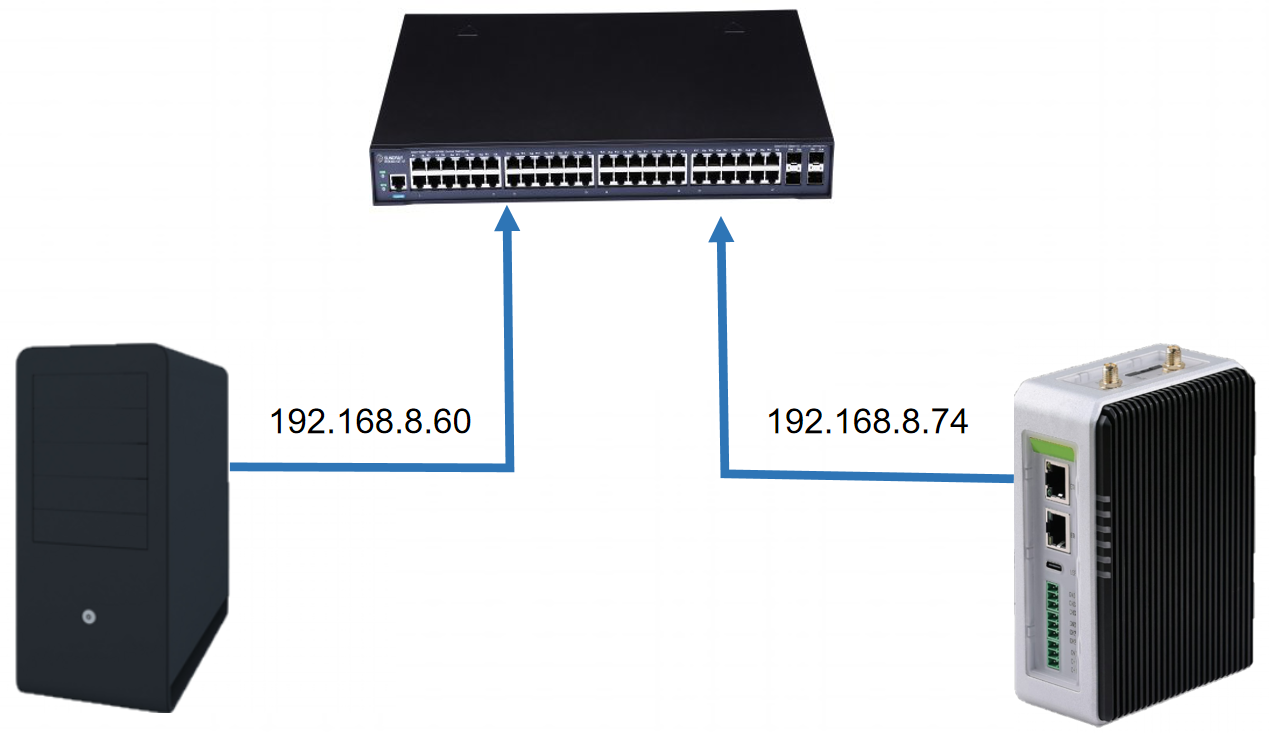
ModbusTCPについては、イーサネットケーブルを使用してW10 PCとreComputer R1000をスイッチに接続し、同じネットワークセグメント上にあることを確認します。
reComputer R1000v1.1でminicomを設定する
注意: minicomでRS485を使用する前に、こちらのようにr1000ドライバをインストールしてください。
まず、minicomをインストールします
以下のコマンドでホストコンピュータとreComputer r1000の両方にminicomをインストールします:
sudo apt install minicom
次に、minicomを以下のように設定してください
ターミナルをCtrl+Alt+Tで開き、以下のようなコマンドを入力してください:
sudo minicom -D /dev/ttyAMA*
ttyAMA* は使用する RS485 に応じて ttyAMA2, ttyAMA3 または ttyAMA4 になります。
次に Ctal+A を入力してから Z を入力すると、以下のような minicom が表示されます:
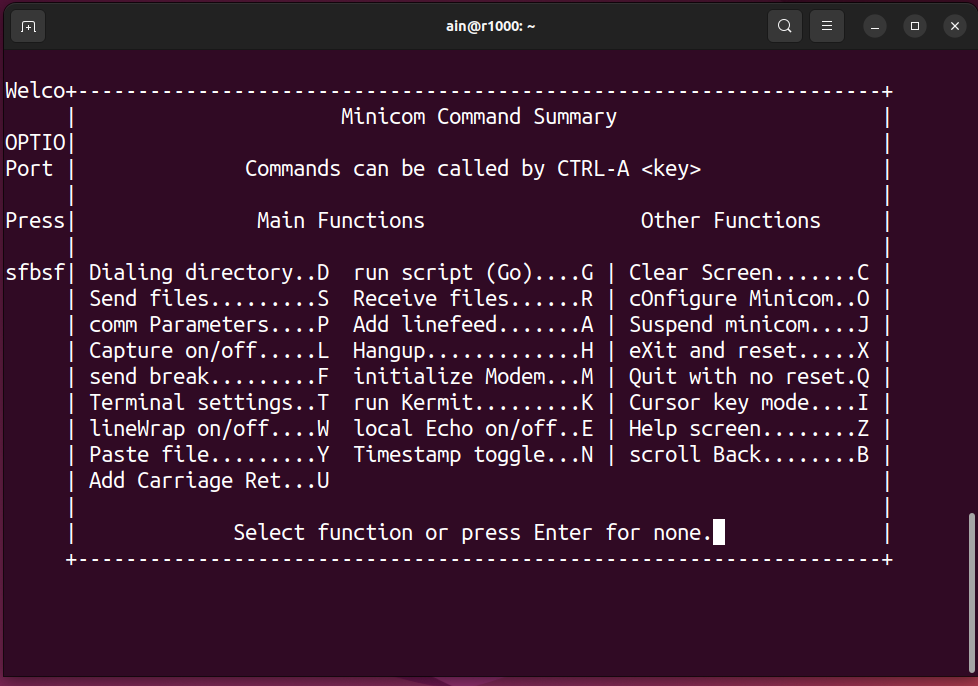
o を入力して minicom を設定し、Serial port setup を選択すると以下のように表示されます:
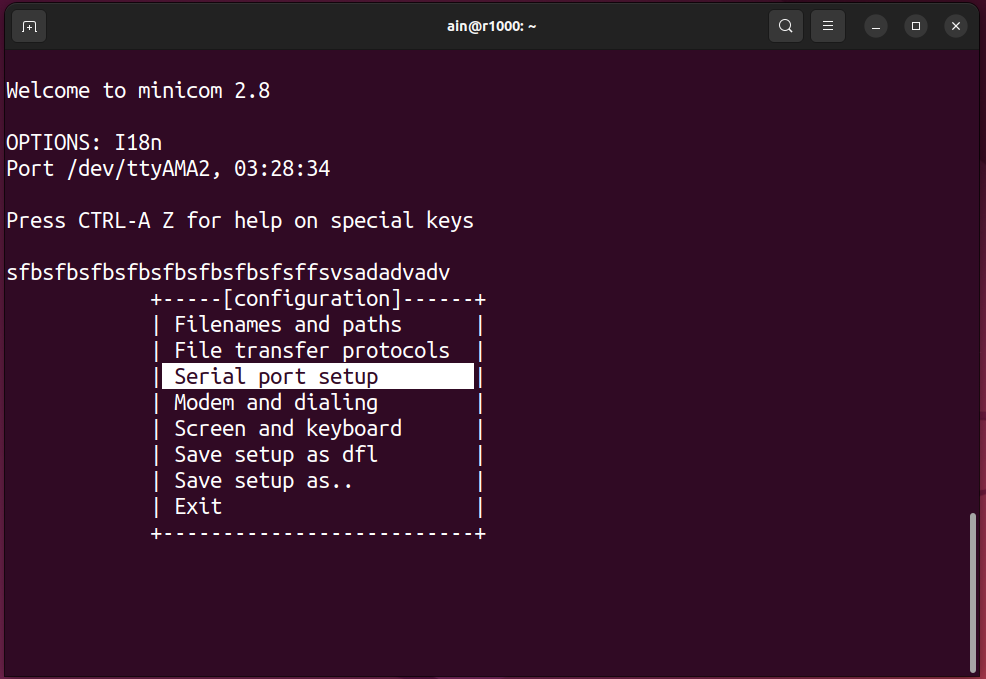
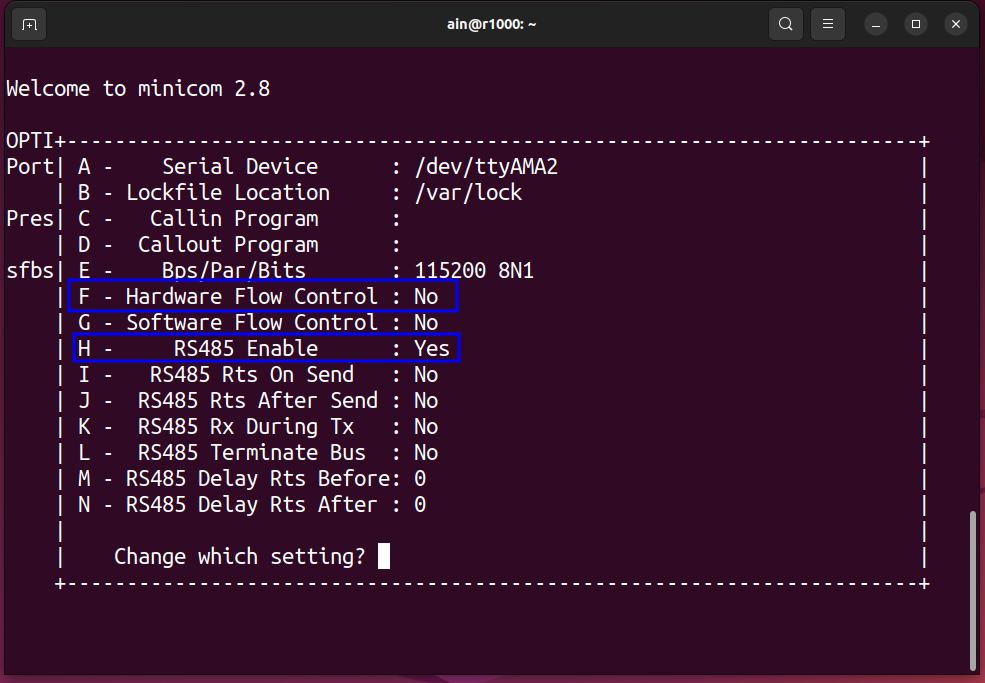
次に F と H を入力して minicom を RS485 モードにすると、結果は以下のように表示されます:
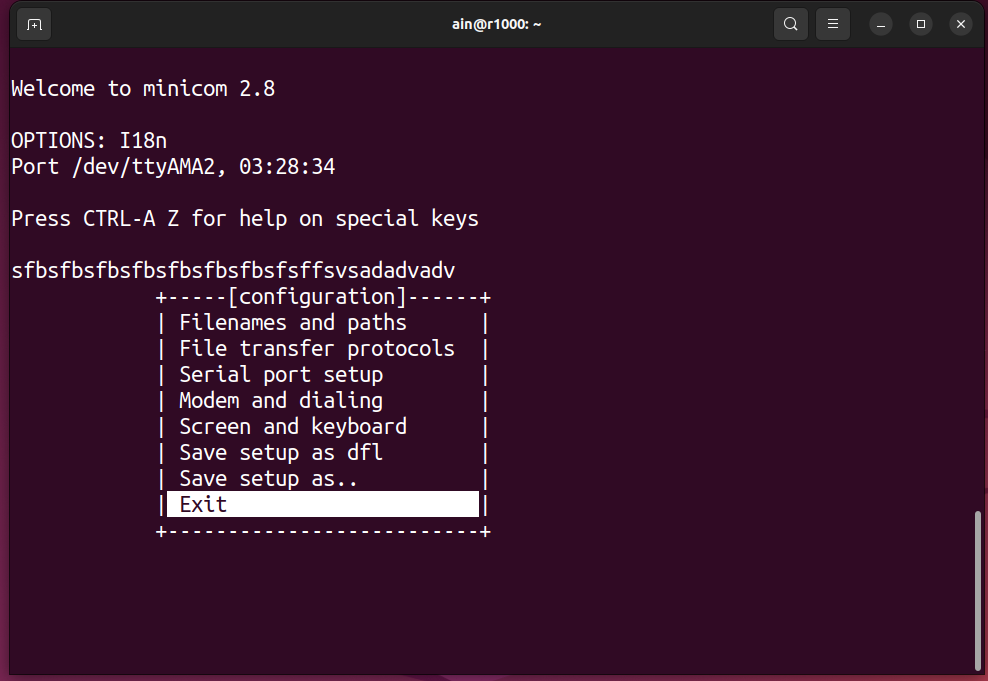
最後に、Exit を選択して Enter を入力して設定を終了します。以下のようになります:
reComputer R1000 v1.0 で必要なアクション
reComputer R1000 v1.0 では、内蔵 485 トランシーバーの DE ピンがデフォルトで制御不能になっており、これはインターフェースが単方向でのみデータを送信できる(受信または送信のみ)ことを意味します。
ハードウェアリビジョン(v1.0 と v1.1)を区別するには、reComputer R1000 V1.1 Product change details を参照してください。
現在、2つのソリューションがあります。1つは UART ドライバーをフックするカーネルモジュールをロードする方法で、これを推奨します。もう1つは、単純に libgpiod を呼び出して DE ピンを制御するアプリケーション層ベースのソリューションです。ニーズに応じて選択できます。
カーネルモジュールソリューション(推奨)
インストール
まず、カーネルモジュールのソースコードをダウンロードする必要があります。これは独立したリポジトリなので、直接クローンできます。
git clone https://github.com/bclswl0827/r1000v1-rs485-autoflow
cd r1000v1-rs485-autoflow
次に、カーネルモジュールをコンパイルする必要があります。
make
コンパイル中にエラーが発生している場合は、現在実行中のカーネルに対応するカーネルヘッダーをインストールする必要があるかもしれません。Raspberry Pi OSを使用していることを前提として、以下のコマンドを使用してカーネルヘッダーをインストールできます。
sudo apt-get install linux-headers-$(uname -r)
その後、カーネルモジュールを再度コンパイルできます。
カーネルモジュールの読み込み
コンパイルが完了したら、以下のコマンドを実行してカーネルモジュールを読み込むことができます。
sudo insmod r1000v1-rs485-autoflow.ko
カーネルモジュールが正常にロードされた場合、カーネルログに以下のメッセージが表示されるはずです。dmesg コマンドで確認してください。
[ 256.037465] r1000v1_rs485_autoflow: RS-485 interface has been hooked successfully
minicomツールを使用してRS485通信をテストできます。他のシリアルポートテストツール(例:picocom)も使用できます。
起動時にカーネルをロードするには、以下のコマンドを使用してこのモジュールを/etc/modulesファイルに追加できます。
echo "r1000v1_rs485_autoflow" | sudo tee -a /etc/modules
モジュールが登録された後、変更を有効にするためにシステムを再起動する必要があります。
sudo reboot
カーネルモジュールのアンロード
カーネルモジュールをアンロードするには、以下のコマンドを実行できます。内蔵のRS485インターフェースは受信専用モードに戻ります。
sudo rmmod r1000v1-rs485-autoflow
DKMSでモジュールを追加する
DKMS(Dynamic Kernel Module Support)は、カーネルモジュールのビルドとインストールを自動化するシステムで、複数のカーネルバージョン間でモジュールを管理するのに便利です。DKMSを使用することで、カーネルアップデート後でもモジュールの互換性を確保できます。
このカーネルモジュールをDKMSで追加するには、以下のコマンドを使用してください:
sudo make dkms_install
このコマンドは、モジュールをDKMSに登録し、コンパイルして現在のカーネルバージョン用にインストールします。将来カーネルがアップグレードされた際、DKMSは自動的に新しいバージョン用にモジュールを再ビルドしてインストールするため、手動で再コンパイルする必要はありません。
アプリケーション層ソリューション
スクリプトの使用
-
この記事で言及した方法に加えて、以下のコマンドで実行できるスクリプトも提供しています。このスクリプトは自動的に新しい /dev/ttyx を作成し、新しく作成されたデバイス番号を使用してrs485/modbus rtu通信を実行するだけで十分です
curl -sSL https://raw.githubusercontent.com/Seeed-Projects/R1000-RS485-Util/main/setup_rs485.sh | sudo bash
手動セットアップ
まず、私たちが提供するCプログラムをダウンロードし、ReadMeの内容を参照してください。コンパイルして実行します。
git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays
cd seeed-linux-dtoverlays/tools/rs485_control_DE/
sudo apt-get install libgpiod-dev
gcc -o rs485_DE rs485_DE.c -lgpiod
sudo ./rs485_DE /dev/ttyAMA2 /dev/gpiochip0 6 /dev/ttyAMA10
このプログラムは新しいttyAMAx デバイスを作成します。デバイス番号は、プログラム実行時に入力するパラメータによって決まります。
- 上記の例では、1つのRS485インターフェースの使用方法を示しています。3つの485インターフェースを使用したい場合は、以下のスクリプトを使用して実現できます:
sudo ./rs485_DE /dev/ttyAMA2 /dev/gpiochip0 6 /dev/ttyAMA10 &
sudo ./rs485_DE /dev/ttyAMA3 /dev/gpiochip0 17 /dev/ttyAMA11 &
sudo ./rs485_DE /dev/ttyAMA5 /dev/gpiochip0 24 /dev/ttyAMA12 &
ttyAMA10ttyAMA12 は ttyAMA2ttyAMA5 と一対一で対応しています。通常の通信では、アプリケーションで ttyAMA10ttyAMA12 を使用してください(ttyAMA2ttyAMA5 は使用できません。スクリプトによって新しく作成されたデバイス番号を使用する必要があります)
Modbus RTU テストの使用手順
ステップ 1: reComputer R1000 で以下のスクリプトを入力して minicom ソフトウェアを開きます
minicom -D /dev/ttyAMAx -b 9600
その中で、-D の後にはオープンしたいデバイス番号が続き、-b はボーレートを指し、デバイス番号は最初のステップで新しく作成されたデバイス番号である必要があります。次に、W10 PC で MobaXterm を開き、新しいシリアルポートターミナルを作成し、シリアルポート番号を選択し、ボーレートは 9600 に設定します。最後に、RS485 との双方向通信を実行できます。図に示すように、reComputer R1000 で入力された内容は RS485 経由で送信できます。W10 PC では、W10 PC で入力された内容も reComputer R1000 に送信でき、双方向通信が正常に動作します。
ステップ 2: RS485 機能のテスト後、Modbus 機能テストを実行できます。このステップでは、reComputer R1000 を Modbus スレーブとしてテストできます。reComputer R1000 で ModbusMechanic ソフトウェアを開き、デバイス番号とボーレートを選択し、左上のシミュレートされたスレーブ機能をクリックして 2 つのコイルを追加します。次に、W10 で Modbus poll をマスターステーションとして開き、スレーブステーションのコイルを読み取ります。その後、Modbus poll の表示ウィンドウを開くと、Modbus RTU の送受信メッセージが正常であることが確認できます。
ステップ 3: このステップでは、reComputer R1000 を Modbus マスターとしてテストできます。reComputer R1000 と W10 PC の両方で ModbusMechanic ソフトウェアを開き、デバイス番号とボーレートを選択します。W10 PC は設定の第 3 ステップを参照してください。reComputer R1000 で Read Coils(0x01) を選択してスレーブのコイルを読み取り、Slave Node を 1 に設定し、Register で読み取りたいアドレスを選択し、最後に Transmit packet をクリックします。
Modbus TCP テストの使用手順
ステップ 1: Win10 PC と R1000 で modbusmechanic を開きます
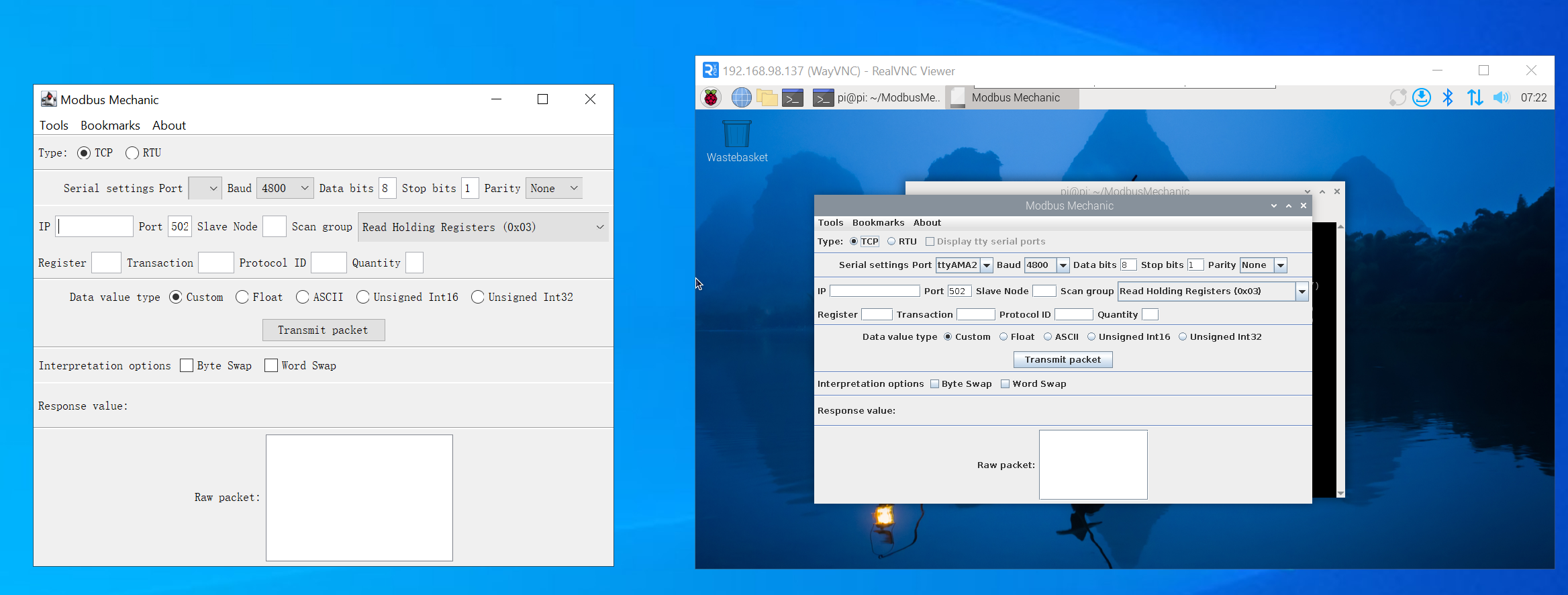
ステップ 2: R1000 が modbus TCP ホストとして動作します。W10 PC で Tool => Start Slave Simulator をクリックし、TYPE で TCP を選択し、Slave ID で 1 を選択し、その後 Coils を追加します。次に R1000 で IP を入力し、Scan group で Read Coil を選択します。Slave Node と Register を入力し、最後に Transmit packet をクリックします。スレーブデータが正常に読み取られたことが確認できます。
ステップ 3: R1000 が modbus TCP スレーブとして動作します。設定については第 2 ステップを参照してください。R1000 がスレーブとして正常にデータを読み取れることが確認できます。
R1000 で Modbus TCP スレーブプログラムを実行するには 502 ポートをリッスンする必要があり、sudo 権限が必要な場合があります。アプリケーションが 502 ポートをリッスンできない場合は、権限を追加してみてください。
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!お客様の製品体験を可能な限りスムーズにするため、さまざまなサポートを提供いたします。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルをご用意しております。