reSpeaker で LeKiwi ロボットに音声インタラクションを追加する
概要
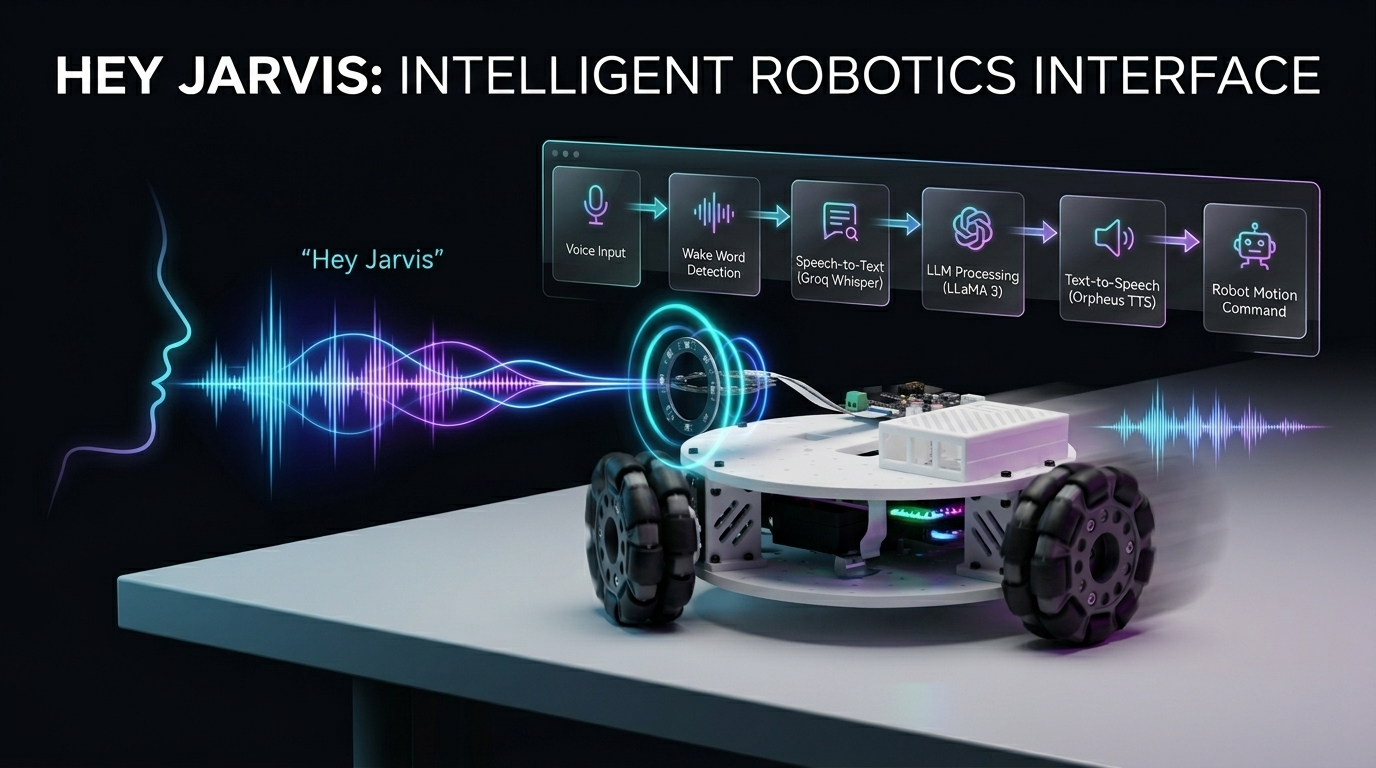
3輪Kiwiドライブロボットを音声で操作しましょう!このプロジェクトでは、Seeed Studio XIAO ESP32(モータコントローラ)と Raspberry Pi(音声処理用ブレイン)を組み合わせ、reSpeaker による高品質な音声取得と Voice Embeddings による、よりスマートでパーソナライズされた音声インタラクションを実現します。自然な言葉でコマンドを出すだけで、ロボットの走行、操舵、制御を完全ハンズフリーで行うことができ、精度と応答性も向上します。
必要なハードウェア
| LeKiwi キット | XIAO ESP32S3 | Raspberry Pi 5 |
|---|---|---|
 |  |  |


サービス
- Groq アカウント:無料プランで十分に始められます
動作の仕組み
You speak → Wake word detected → Audio recorded → Whisper STT → LLaMA LLM → Orpheus TTS speaks back → ESP32 moves the robot
- ウェイクワードを話します(デフォルト:"Hey Jarvis")
- Raspberry Pi があなたのコマンドを録音します
- Groq Whisper が音声をテキストに書き起こします
- LLaMA 3 がロボットが取るべきアクションを判断します
- Groq Orpheus TTS が応答を音声で読み上げます
- シリアルコマンドが ESP32 に送信され、モータを駆動します
XIAO ESP32(モータコントローラ)の準備
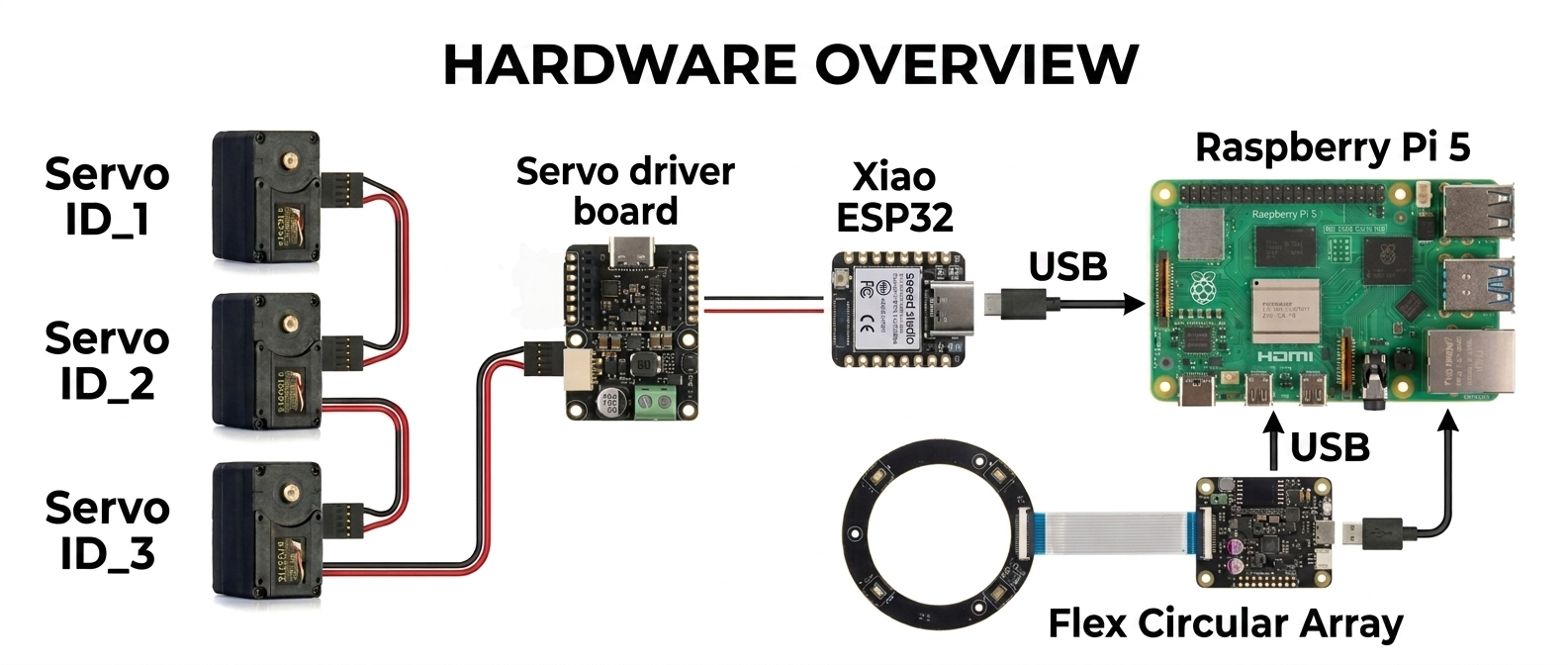
ESP32 は Arduino スケッチを実行し、Kiwi-drive キネマティクスを用いて3つの車輪を物理的に駆動します。Raspberry Pi から送られてくる1文字のシリアルコマンド(w、s、a、d など)を受信し、それを協調したモータ速度に変換します。
ステップ 1 — モータ ID を設定する
このスケッチはサーボ ID を 1, 2, 3 として想定しています。ロボットを組み立てる前に、各サーボを個別に接続し、Feetech 設定ツールを使って正しい ID を割り当ててください。
ステップ 2 — LeKiwi を組み立てる
公式の Seeed Studio 動画チュートリアルに従って、シャーシの組み立て、ホイールの取り付け、サーボの配線を行ってください。
完了する必要があるのは物理的な組み立てのみです。このプロジェクトでは別の構成を使用するため、LeRobot GitHub リポジトリのクローンに関する手順はすべてスキップしてください。
ステップ 3 — Arduino スケッチを書き込む
スケッチ(lekiwi_motor_control.ino)は次のことを行います:
- 3つのサーボすべてを位置モードで初期化しセンタリングした後、ホイール(連続回転)モードに切り替えます
- USB シリアルポートで1文字コマンドを待ち受けます
- Kiwi-drive キネマティクスを使用して、各車輪の正しい速度を計算します
- ナッジモードのみをサポートします(短いバースト駆動後、自動停止) シリアルコマンドリファレンス:
| キー | 動作 |
|---|---|
w | 前進ナッジ |
s | 後退ナッジ |
a | 左旋回ナッジ |
d | 右旋回ナッジ |
q | 左平行移動ナッジ |
e | 右平行移動ナッジ |
x / Space | 緊急停止 |
+ / - | ナッジ時間の増加 / 減少 |
* / / | ナッジ速度の増加 / 減少 |
Arduino IDE から SCServo ライブラリをインストールした状態でスケッチを書き込みます。シリアルモニタを 115200 ボーに設定し、3つのサーボすべてが OK を返すことを確認してください。
Arduino コード
#include <SCServo.h>
#include <math.h>
// Serial port selection
#if defined(CONFIG_IDF_TARGET_ESP32C3) || \
defined(CONFIG_IDF_TARGET_ESP32C6) || \
defined(CONFIG_IDF_TARGET_ESP32S3)
#define COMSerial Serial0
#else
#define COMSerial Serial1
#endif
#define S_RXD D7
#define S_TXD D6
SMS_STS st;
#define SERVO_NUM 3
byte ID[SERVO_NUM] = {1, 2, 3};
// Kiwi drive wheel angles (90°, 210°, 330°)
const float WHEEL_ANGLE_DEG[SERVO_NUM] = {90.0f, 210.0f, 330.0f};
// Base speed (0-3000 for STS3215 in wheel mode)
int BASE_SPEED = 1000;
// Nudge parameters
int NUDGE_DURATION = 1500; // milliseconds to move
int NUDGE_SPEED = 800; // speed during nudge
#define REG_OPERATING_MODE 33
void enableWheelMode(byte servoID) {
// Unlock EEPROM
st.unLockEprom(servoID);
delay(10);
// Set wheel mode (value 1 for continuous rotation mode)
st.writeByte(servoID, REG_OPERATING_MODE, 1);
delay(10);
// Lock EEPROM
st.LockEprom(servoID);
delay(10);
// IMPORTANT: Enable torque after mode change
st.EnableTorque(servoID, 1);
delay(10);
Serial.print("Servo "); Serial.print(servoID);
Serial.println(" configured for wheel mode with torque enabled");
}
void setWheelSpeeds(float vx, float vy, float omega) {
for (int i = 0; i < SERVO_NUM; i++) {
float rad = WHEEL_ANGLE_DEG[i] * (PI / 180.0f);
// Kiwi kinematics formula
float speed = -sin(rad) * vx + cos(rad) * vy + omega;
// Scale to servo speed range (-3000 to +3000)
int spdInt = (int)(speed * BASE_SPEED);
// Clamp to valid range
if (spdInt > 3000) spdInt = 3000;
if (spdInt < -3000) spdInt = -3000;
// WriteSpe expects (id, speed) - only 2 parameters!
st.WriteSpe(ID[i], spdInt);
}
}
void nudgeRobot(float vx, float vy, float omega) {
// Calculate temporary speeds using nudge speed instead of base speed
int originalBaseSpeed = BASE_SPEED;
BASE_SPEED = NUDGE_SPEED;
// Apply movement
setWheelSpeeds(vx, vy, omega);
// Wait for nudge duration
delay(NUDGE_DURATION);
// Stop all motors
stopAll();
// Restore original base speed
BASE_SPEED = originalBaseSpeed;
}
void stopAll() {
for (int i = 0; i < SERVO_NUM; i++) {
st.WriteSpe(ID[i], 0);
}
Serial.println("Motors stopped");
}
void initializeServosToPositionMode() {
Serial.println(F("Setting servos to position mode for initial positioning..."));
for (int i = 0; i < SERVO_NUM; i++) {
// Unlock EEPROM
st.unLockEprom(ID[i]);
delay(10);
// Set position mode (value 0)
st.writeByte(ID[i], REG_OPERATING_MODE, 0);
delay(10);
// Lock EEPROM
st.LockEprom(ID[i]);
delay(10);
// Enable torque
st.EnableTorque(ID[i], 1);
delay(10);
}
delay(500);
Serial.println(F("Moving all servos to center position (2048)..."));
// Move all servos to center position
u16 Speed[SERVO_NUM] = {1500, 1500, 1500};
byte ACC[SERVO_NUM] = {50, 50, 50};
s16 Pos[SERVO_NUM] = {2048, 2048, 2048};
st.SyncWritePosEx(ID, SERVO_NUM, Pos, Speed, ACC);
delay(2000); // Wait for movement to complete
Serial.println(F("Servos positioned. Switching to wheel mode..."));
// Now switch to wheel mode
for (int i = 0; i < SERVO_NUM; i++) {
enableWheelMode(ID[i]);
delay(50);
}
}
void printHelp() {
Serial.println(F("\n====== LeKiwi Nudge Control ======"));
Serial.println(F("Each key press gives a short 'nudge' movement"));
Serial.println(F(" w = Forward nudge"));
Serial.println(F(" s = Backward nudge"));
Serial.println(F(" a = Turn LEFT nudge"));
Serial.println(F(" d = Turn RIGHT nudge"));
Serial.println(F(" q = Strafe LEFT nudge"));
Serial.println(F(" e = Strafe RIGHT nudge"));
Serial.println(F(" x = STOP (emergency)"));
Serial.println(F(""));
Serial.println(F("Continuous movement mode:"));
Serial.println(F(" SHIFT + key = Continuous movement"));
Serial.println(F(" Example: Press 'W' (uppercase) = continuous forward"));
Serial.println(F(""));
Serial.println(F("Settings:"));
Serial.println(F(" + = Increase nudge duration"));
Serial.println(F(" - = Decrease nudge duration"));
Serial.println(F(" * = Increase nudge speed"));
Serial.println(F(" / = Decrease nudge speed"));
Serial.println(F(" ? = Show this help"));
Serial.println(F(""));
Serial.print(F("Current nudge duration: "));
Serial.print(NUDGE_DURATION);
Serial.println(F(" ms"));
Serial.print(F("Current nudge speed: "));
Serial.println(NUDGE_SPEED);
Serial.println(F("==================================="));
}
void setup() {
Serial.begin(115200);
delay(1500);
Serial.println(F("LeKiwi Nudge Control boot..."));
// Start servo bus with explicit pins
COMSerial.begin(1000000, SERIAL_8N1, S_RXD, S_TXD);
st.pSerial = &COMSerial;
delay(500);
Serial.println(F("Checking servos..."));
bool allServosFound = true;
for (int i = 0; i < SERVO_NUM; i++) {
if (st.Ping(ID[i]) != -1) {
Serial.print(F("Servo "));
Serial.print(ID[i]);
Serial.println(F(" OK"));
} else {
Serial.print(F("ERROR: Servo "));
Serial.print(ID[i]);
Serial.println(F(" not found!"));
allServosFound = false;
}
delay(100);
}
if (!allServosFound) {
Serial.println(F("Some servos not found. Check connections and power!"));
while(1) { delay(1000); } // Halt if servos not found
}
// Initialize servos to center position, then switch to wheel mode
initializeServosToPositionMode();
Serial.println(F("\nSystem ready! Press keys for nudge movement."));
Serial.println(F("(Each key press moves the robot a short distance)\n"));
printHelp();
}
void loop() {
if (!Serial.available()) return;
char cmd = (char)Serial.read();
bool isShifted = false;
// Check for uppercase (SHIFT key in terminal)
if (cmd >= 'A' && cmd <= 'Z') {
isShifted = true;
}
// Flush any trailing characters
while (Serial.available() && (Serial.peek() == '\n' || Serial.peek() == '\r')) {
Serial.read();
}
// Process movement commands
switch (cmd) {
case 'w':
if (isShifted) {
setWheelSpeeds(0, 1, 0);
Serial.println(F("Continuous Forward"));
} else {
Serial.println(F("Nudge Forward"));
nudgeRobot(0, 1, 0);
}
break;
case 's':
if (isShifted) {
setWheelSpeeds(0, -1, 0);
Serial.println(F("Continuous Backward"));
} else {
Serial.println(F("Nudge Backward"));
nudgeRobot(0, -1, 0);
}
break;
case 'q':
if (isShifted) {
setWheelSpeeds(-1, 0, 0);
Serial.println(F("Continuous Strafe Left"));
} else {
Serial.println(F("Nudge Strafe Left"));
nudgeRobot(-1, 0, 0);
}
break;
case 'e':
if (isShifted) {
setWheelSpeeds(1, 0, 0);
Serial.println(F("Continuous Strafe Right"));
} else {
Serial.println(F("Nudge Strafe Right"));
nudgeRobot(1, 0, 0);
}
break;
case 'a':
if (isShifted) {
setWheelSpeeds(0, 0, 1);
Serial.println(F("Continuous Turn Left"));
} else {
Serial.println(F("Nudge Turn Left"));
nudgeRobot(0, 0, 1);
}
break;
case 'd':
if (isShifted) {
setWheelSpeeds(0, 0, -1);
Serial.println(F("Continuous Turn Right"));
} else {
Serial.println(F("Nudge Turn Right"));
nudgeRobot(0, 0, -1);
}
break;
case 'x': case 'X': case ' ':
stopAll();
Serial.println(F("Emergency Stop"));
break;
case '+':
NUDGE_DURATION = min(NUDGE_DURATION + 50, 1000);
Serial.print(F("Nudge duration: "));
Serial.print(NUDGE_DURATION);
Serial.println(F(" ms"));
break;
case '-':
NUDGE_DURATION = max(NUDGE_DURATION - 50, 50);
Serial.print(F("Nudge duration: "));
Serial.print(NUDGE_DURATION);
Serial.println(F(" ms"));
break;
case '*':
NUDGE_SPEED = min(NUDGE_SPEED + 100, 2000);
Serial.print(F("Nudge speed: "));
Serial.println(NUDGE_SPEED);
break;
case '/':
NUDGE_SPEED = max(NUDGE_SPEED - 100, 200);
Serial.print(F("Nudge speed: "));
Serial.println(NUDGE_SPEED);
break;
case '?':
printHelp();
break;
}
}
Raspberry Pi(音声ブレイン)の準備
ステップ 1 — Groq API キーを取得する
- console.groq.com に登録します
- 新しい API キーを作成してコピーします — ステップ 4 で必要になります
ステップ 2 — このリポジトリをクローンする
git clone https://github.com/KasunThushara/Lekiwi-voice
cd Lekiwi-voice
ステップ 3 — 仮想環境を作成する
python3 -m venv venv
source venv/bin/activate
このプロジェクトを使用する前に、新しいターミナルを開くたびに
source venv/bin/activateを実行してください。
ステップ 4 — 依存関係をインストールする
pip install -r requirements.txt
次にウェイクワードモデルをダウンロードします:
python3 download_model.py
これにより、事前学習済みの "Hey Jarvis" モデル(およびその他)が openwakeword から ~/.openwakeword/ にダウンロードされます。
ステップ 5 — マイクのインデックスを確認する
USB 経由で reSpeaker を接続し、次を実行します:
python3 list_mics.py
次のような一覧が表示されます:
Available audio INPUT devices:
[0] bcm2835 Headphones (rate=44100Hz)
[1] ReSpeaker 4 Mic Array (rate=16000Hz)
[2] USB PnP Sound Device (rate=16000Hz)
ReSpeaker の横の角括弧内の数字をメモします — それが MIC_INDEX です。
ステップ 6 — ESP32 のシリアルポートを確認する
XIAO ESP32 を USB で Pi に接続し、次を実行します:
python3 list_ports.py
出力例:
Available serial ports:
/dev/ttyACM0 USB Serial Device
/dev/ttyUSB0 CP2102 USB to UART Bridge
デバイスパス(XIAO の場合は通常 /dev/ttyACM0)をメモします。
ステップ 7 — プロジェクトを設定する
サンプル設定ファイルをコピーし、自分の値を入力します:
cp config.env.example config.env
nano config.env
更新すべき主な設定:
# Your Groq API key (required)
GROQ_API_KEY=gsk_xxxxxxxxxxxxxxxxxxxxxxxx
# The number from list_mics.py
MIC_INDEX=1
# The port from list_ports.py
SERIAL_PORT=/dev/ttyACM0
それ以外は、入門用としてデフォルトのままにしておいて構いません。
ロボットを実行する
仮想環境が有効になっていることを確認し、次を実行します:
python3 pipeline.py
次のような表示が出るはずです:
======================================================
LeKiwi Voice Controller — Ready
Wake word : hey jarvis
LLM model : llama-3.1-8b-instant
STT model : whisper-large-v3-turbo
TTS voice : autumn
Serial : /dev/ttyACM0 @ 115200
======================================================
[WakeWord] Listening for 'hey jarvis' ...
ここで "Hey Jarvis" と話しかけて、動作コマンドを出してみましょう!
コマンド例
"Hey Jarvis, move forward"
"Hey Jarvis, turn left"
"Hey Jarvis, strafe right"
"Hey Jarvis, stop"
"Hey Jarvis, what can you do?"
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます。私たちは、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに合わせて選べる、複数のコミュニケーションチャネルをご用意しています。