DoA と VAD reSpeaker Flex と Xiao ESP32S3
はじめに
ReSpeaker Flex は XMOS XVF3800 をベースとしたマルチマイク音声処理ソリューションで、リアルタイムのオーディオインテリジェンスを必要とする組み込みアプリケーション向けに設計されています。XVF3800 は内部で Voice Activity Detection (VAD) と Direction of Arrival (DoA) を計算し、音声が存在するタイミングと、その音声がどの方向から来ているかを示します。これらの推論結果は、リソースベースのコマンドを使用して I2C 経由でホスト MCU から直接アクセスできるため、ホスト側で生のオーディオを処理することなく、音声起動、音源位置推定、方向認識フィードバックなどの機能を実現できます。
| reSpeaker Flex XVF3800 直線型(XIAO ESP32S3 搭載) | reSpeaker Flex XVF3800 円形(XIAO ESP32S3 搭載) | |
|---|---|---|
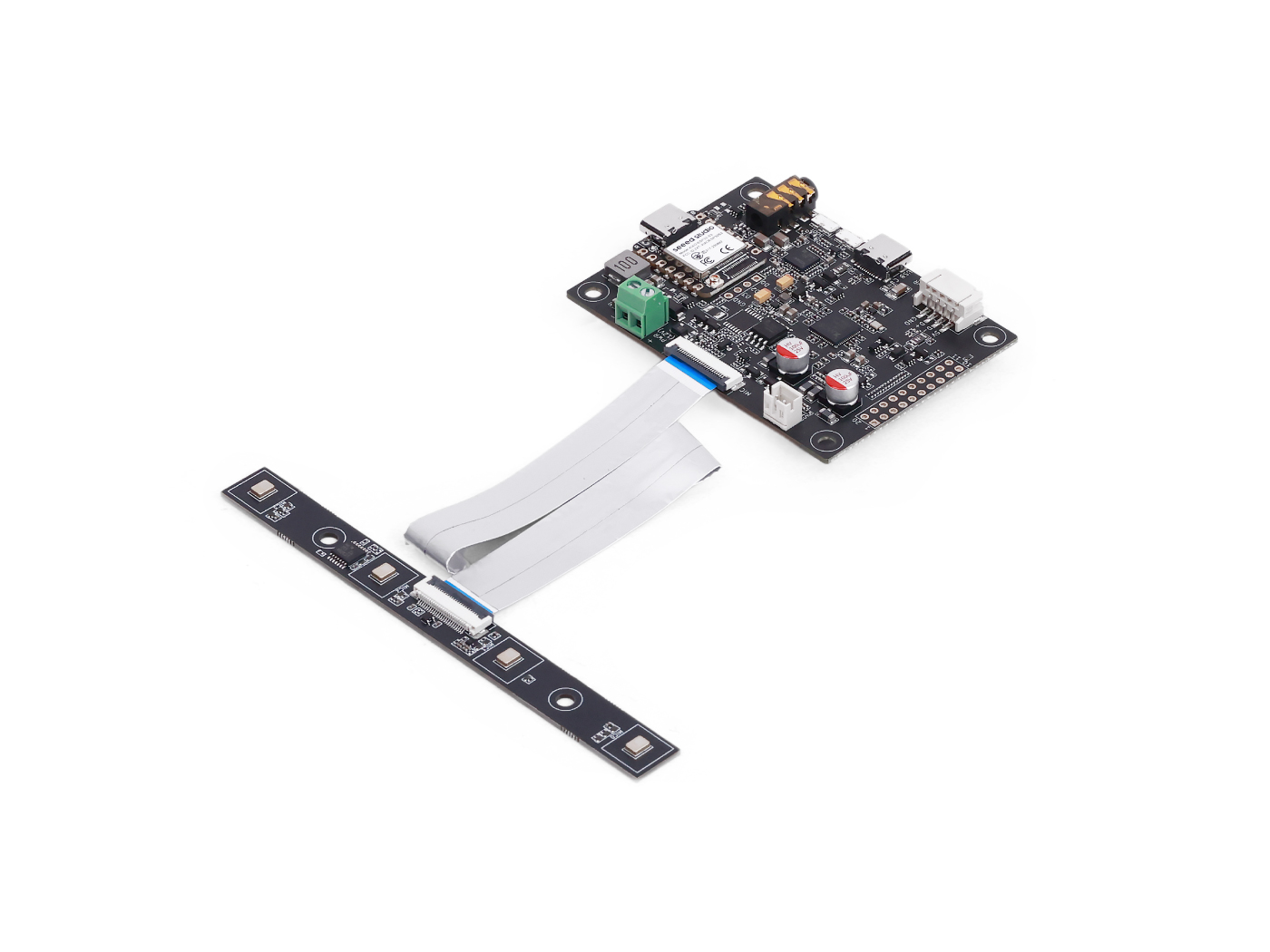 |  | |
注記
このコードをサポートするファームウェアは respeaker_xvf3800_i2s_master_dfu_firmware_v1.0.x_48k_test5.bin です。必ず最初にこのファームウェアを書き込んでください。
Arduino コード
#include <Wire.h>
#include "AudioTools.h"
// ── I2C ──────────────────────────────────────────────────────────
#define XMOS_ADDR 0x2C
#define GPO_SERVICER_RESID 20 // resid
#define GPO_SERVICER_RESID_DOA 18 // cmdid — fixed from 19 to 18 (matches Python)
#define GPO_DOA_READ_NUM_BYTES 4
// ── I2S pins (XIAO ESP32S3 ↔ ReSpeaker Flex) ─────────────────────
#define I2S_BCK_PIN 8
#define I2S_WS_PIN 7
#define I2S_DATA_PIN 43 // RX from XVF3800
// ── Audio config ──────────────────────────────────────────────────
const int SAMPLE_RATE = 16000;
const int CHANNELS = 2; // stereo interleaved from XVF3800
const int BITS = 32;
const int BLOCK_SAMPLES = 512; // samples per chunk (both channels)
AudioInfo audioInfo(SAMPLE_RATE, CHANNELS, BITS);
I2SStream i2s;
// ── Timing ────────────────────────────────────────────────────────
unsigned long lastDoaMs = 0;
const unsigned long DOA_INTERVAL_MS = 250;
// ─────────────────────────────────────────────────────────────────
bool read_doa(uint16_t &doa_angle, uint16_t &speech) {
Wire.beginTransmission(XMOS_ADDR);
Wire.write(GPO_SERVICER_RESID);
Wire.write(GPO_SERVICER_RESID_DOA | 0x80); // read flag
Wire.write(GPO_DOA_READ_NUM_BYTES + 1); // +1 for status byte
if (Wire.endTransmission() != 0) return false;
uint8_t total = GPO_DOA_READ_NUM_BYTES + 1;
Wire.requestFrom(XMOS_ADDR, total);
if (Wire.available() < total) return false;
uint8_t status = Wire.read(); // status byte (0x00 = OK)
uint8_t buf[4];
for (uint8_t i = 0; i < GPO_DOA_READ_NUM_BYTES; i++) buf[i] = Wire.read();
// Match Python: DOA = result[1] + result[2]*256
// SPEECH = result[3]
doa_angle = (uint16_t)buf[0] | ((uint16_t)buf[1] << 8);
speech = (uint16_t)buf[2] | ((uint16_t)buf[3] << 8);
return true;
}
// RMS on left channel only (stride 2 over stereo interleaved buffer)
float compute_rms(int32_t *samples, int total_samples) {
double sum = 0;
int count = 0;
for (int i = 0; i < total_samples; i += 2) {
double s = (double)samples[i] / (double)INT32_MAX;
sum += s * s;
count++;
}
return count > 0 ? (float)sqrt(sum / count) : 0.0f;
}
// ─────────────────────────────────────────────────────────────────
void setup() {
Serial.begin(115200);
while (!Serial);
Wire.begin();
delay(500);
I2SConfig cfg = i2s.defaultConfig(RX_MODE);
cfg.copyFrom(audioInfo);
cfg.pin_bck = I2S_BCK_PIN;
cfg.pin_ws = I2S_WS_PIN;
cfg.pin_data_rx = I2S_DATA_PIN;
cfg.is_master = true;
if (!i2s.begin(cfg)) {
Serial.println("ERROR: I2S init failed");
while (true);
}
Serial.println("Ready — angle | speech | rms");
}
// ─────────────────────────────────────────────────────────────────
static int32_t audioBuf[BLOCK_SAMPLES * CHANNELS];
void loop() {
// ── I2S read ─────────────────────────────────────────────────
size_t bytesRead = i2s.readBytes((uint8_t *)audioBuf, sizeof(audioBuf));
float rms = 0.0f;
if (bytesRead > 0) {
rms = compute_rms(audioBuf, bytesRead / sizeof(int32_t));
}
// ── DOA poll ─────────────────────────────────────────────────
unsigned long now = millis();
if (now - lastDoaMs >= DOA_INTERVAL_MS) {
lastDoaMs = now;
uint16_t doa = 0, speech = 0;
if (read_doa(doa, speech)) {
Serial.printf("%4u deg | %s | %.4f\n",
doa,
speech ? "SPEECH" : "silent",
rms
);
} else {
Serial.println("I2C read failed");
}
}
}
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます。私たちは、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じてお選びいただける、複数のコミュニケーションチャネルをご用意しています。