SENSING GMSL2 カメラ

様々な解像度、転送速度などをカバーする異なるGMSL2カメラを提供しています。これらのカメラは多くの分野のアプリケーションで使用できます。例えば:
- 自動車
- ADAS + ビューイング融合
- ハイダイナミックレンジイメージング
- 自動運転
- ロボティクス
詳細については以下の仕様をご確認ください。
仕様
本カメラは SONY 製 CMOS イメージセンサー ISX031 と Maxim 製 GMSL2 シリアライザ MAX96717F を搭載しています。自動車グレードのセンサーと入念にチューニングされた ISP により優れた画質を実現。IP67 等級のエンクロージャを採用し、工場で焦点調整・接着固定された AA レンズが付属します。
| 名称 | パラメータ |
|---|---|
| センサー | SONY 2.95MP ISX031 RGGB |
| 画像信号処理(ISP) | Built-in |
| 画像サイズ | 1/2.42 inch CMOS |
| 出力画素 | 1920 H * 1536 V |
| 画素サイズ | 3.0 um * 3.0 um |
| フレームレート | 1920 * 1536 @ 30fps |
| HDR 対応 | Yes |
| フリッカ低減(LFM) | Yes |
| 出力データ | YUV422@8bit |
| シリアライザ | MAXIM MAX9295A |
| カメラインターフェース | GMSL2 |
| 電源 | 9~16V POC |
| 電流 | <200mA@12VDC |
| コネクタ | Amphenol Fakra (Z Code) |
| 動作温度範囲 | -40 ~ 85℃ |
| 寸法 | W:25mm, L:25mm, H:18.6mm |
| 重量 | <50g |
ハードウェア設定
| カテゴリ | 仕様 | パラメータ |
|---|---|---|
| シリアライザ | 型番 | MAX9295A |
| I2C アドレス | 0x80 (8 bit address) | |
| レート | GMSL2 (6G bps) | |
| 画像信号処理(ISP) | 型番 | ISX031 |
| I2C アドレス | 0x34 (8 bit address) | |
| フレーム同期 | Controlled by MAX9295A MFP7 | |
| リセット | Controlled by MAX9295A MFP0 |
はじめに
デモンストレーションにはreComputer Robotics J4012を使用します。必要なものは以下の通りです:
- SENSING GMSL2カメラ
- Mini-Fakraケーブル
- reComputer Robotics GMSL2拡張ボード
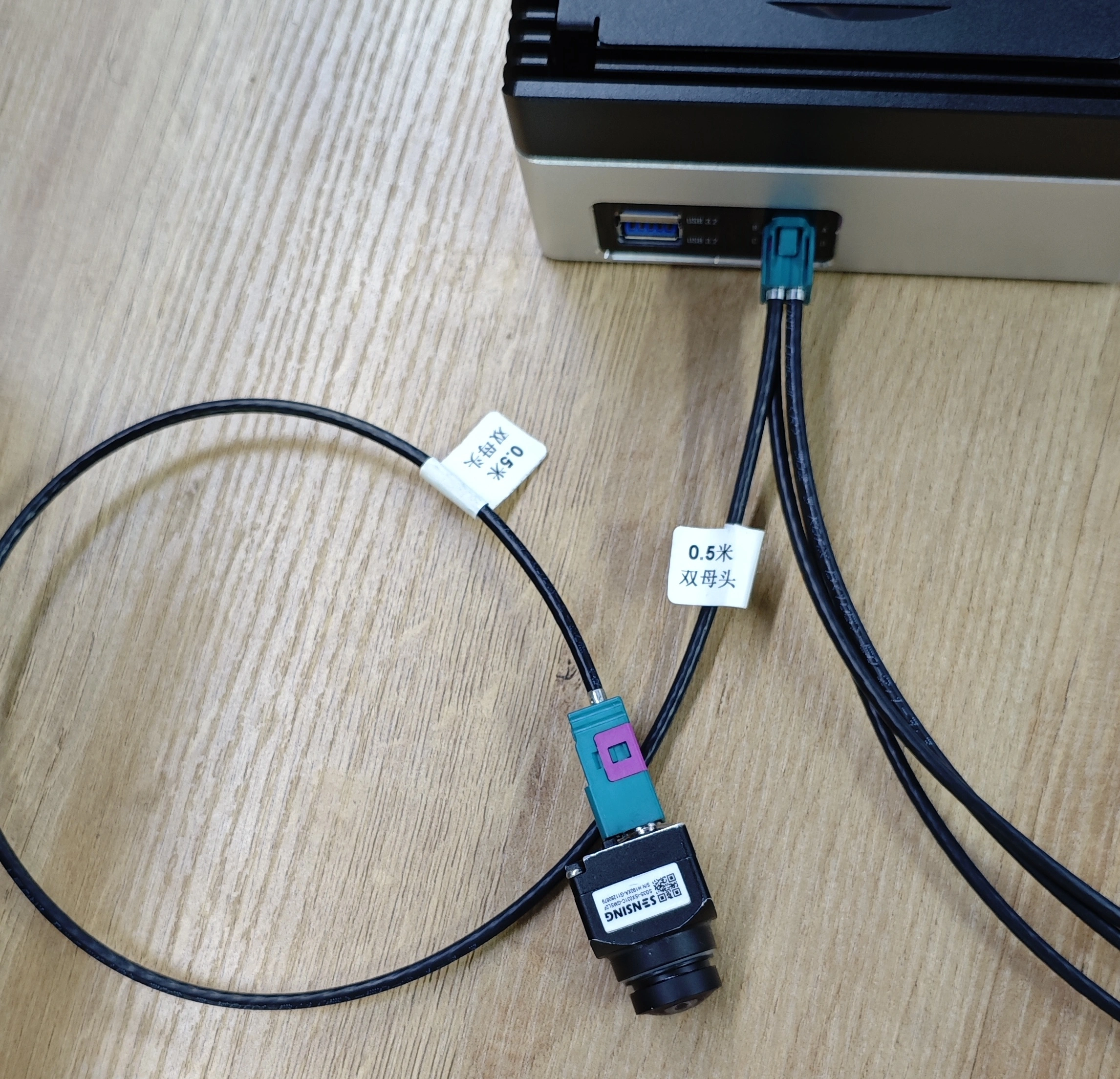
デバイスのセットアップ
Mini Fakraケーブルをカメラに接続します。reComputer Robotics J30/J40には4つのチャンネルがあり、SG3S-ISX031C-GMSL2-Fカメラを使用して**'1'チャンネル(シルクスクリーン文字'B'**)に接続しました。
始める前に、後の設定で使用するため、4つのチャンネルについて理解しておきましょう。

これらの4つのチャンネルはデバイス上で**'A'、'B'、'C'、'D'とラベル付けされています。 お客様には指定されたアルファベット順でカメラを接続することをお勧めします。 この場合、ビデオデバイスはJetson Linux上でそれぞれ'/dev/video0'、'/dev/video1'、'/dev/video2'、'/dev/video3'**としてマッピングされます。
ただし、カメラが1台のみ接続されている場合は、'video0'のみが表示されます。
次に、Jetson IOを使用してデバイスツリーオーバーレイを設定し、デバイスを有効にします(設定して再起動するまで、**'/dev'**フォルダの下にビデオノードは表示されません)。
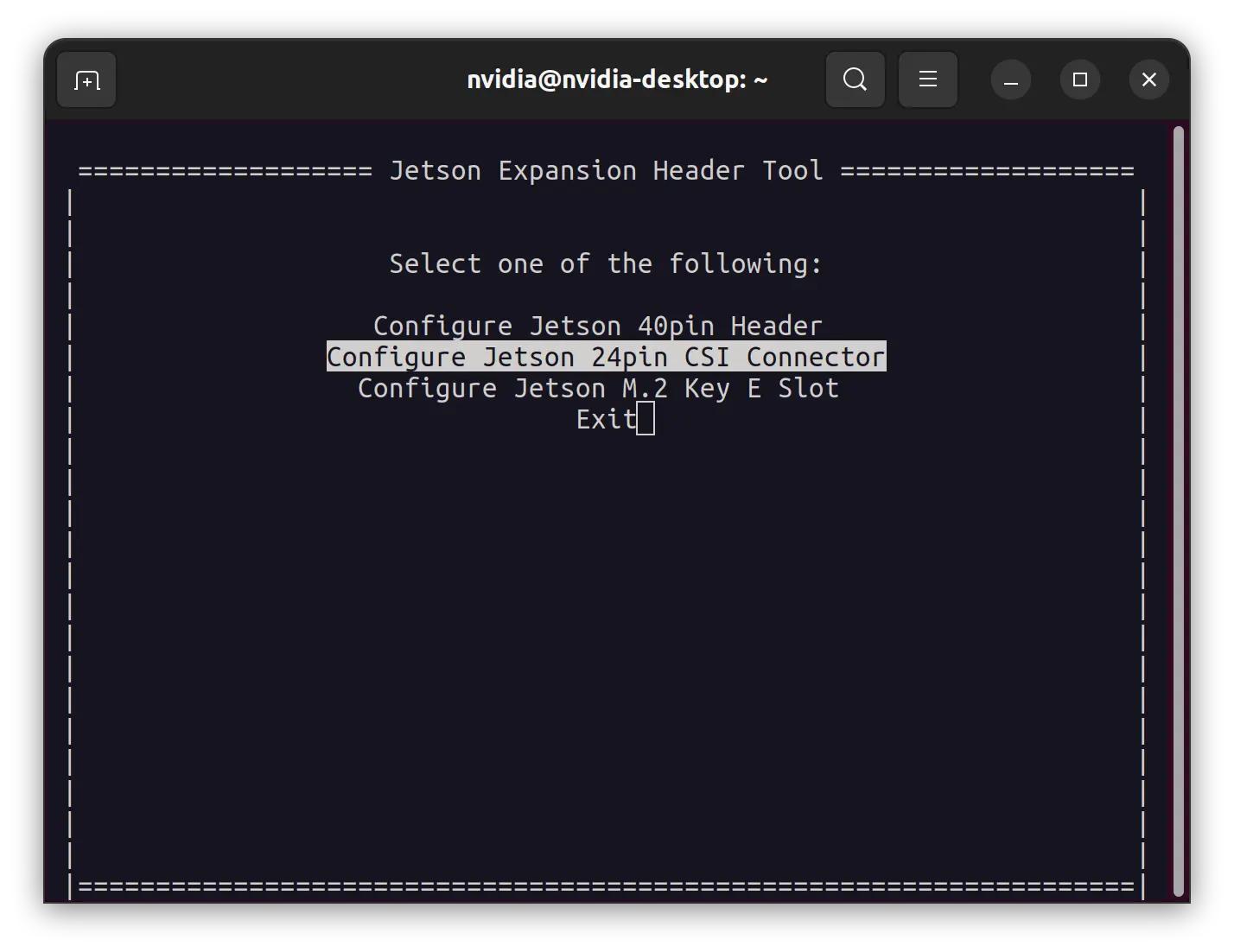
Jetson IOの設定
以下のコマンドでJetsonIOを起動します
sudo /opt/nvidia/jetson-io/jetson-io.py
以下の設定に従ってステップバイステップで進めてください
上記のステップで、6Gbpsカメラを使用している場合は、ステップ3で**'Seeed GMSL 1X4 6G'**オーバーレイを選択してください。6Gbpsカメラは以下の通りです:
- SG3S-ISX031C-GMSL2-H
- SG8S-AR0820C-5300-G2A-H
- SG2-IMX390C-5200-G2A-H
- SG2-AR0233C-5200-G2A-H
ビデオ情報の設定
v4l-utilsをまだインストールしていない場合
sudo apt-get update
sudo apt-get install v4l-utils -y
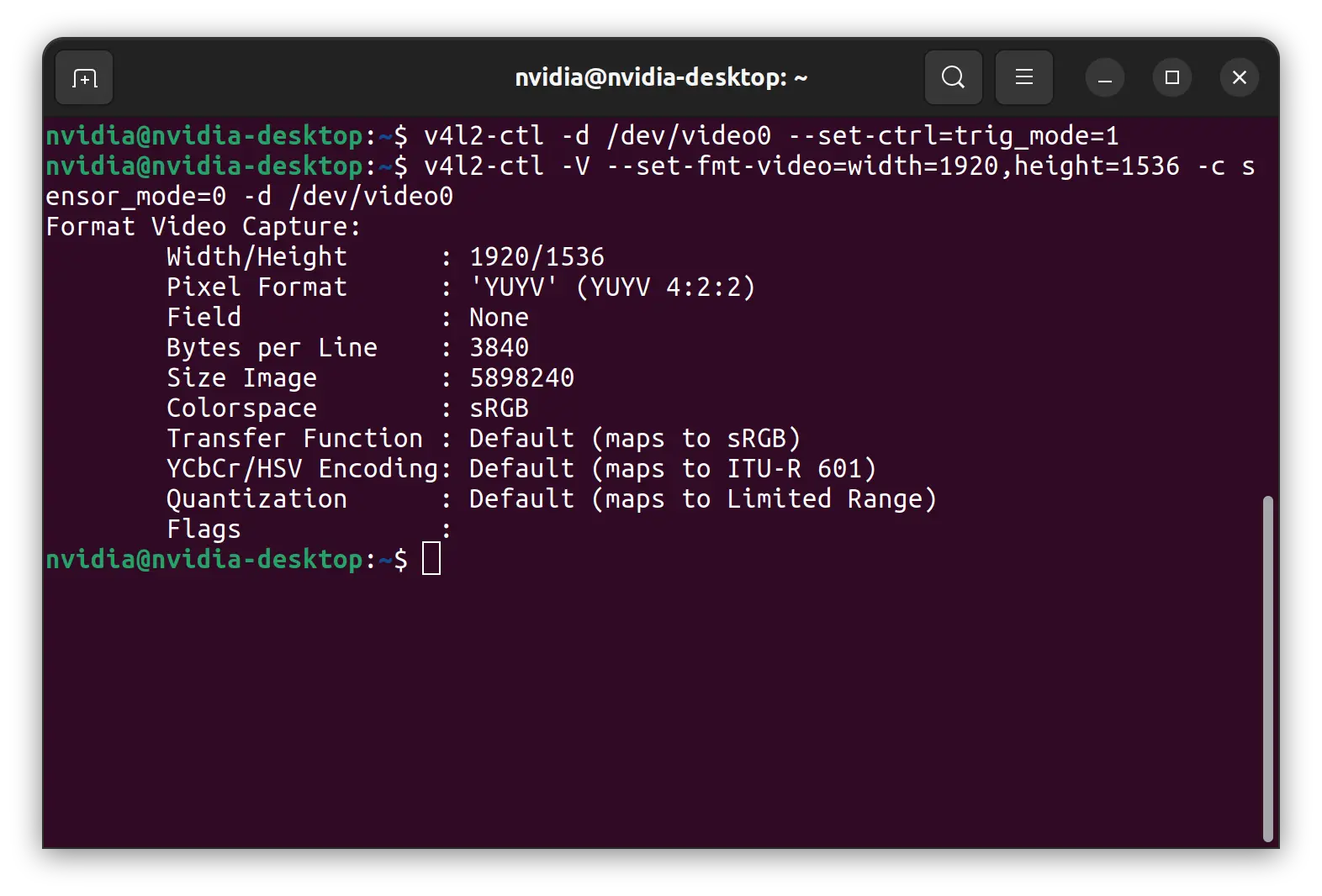
- Frame Synchronization
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
'trig_mode=0' を切り替えてフレーム同期を無効にできます。または、複数のカメラが接続されている場合は 'trig_mode=1' を使用してフレーム同期を有効にします。
- ビデオフォーマット
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
使用しているカメラによって、ここで事前定義されている異なる'sensor_mode'がある可能性があります。主に:
| Sensor Mode | Frame Type |
|---|---|
| 0 | YUYV8_1X16/1920x1536 |
| 1 | YUYV8_1X16/1920x1080 |
| 2 | YUYV8_1X16/3840x2160 |
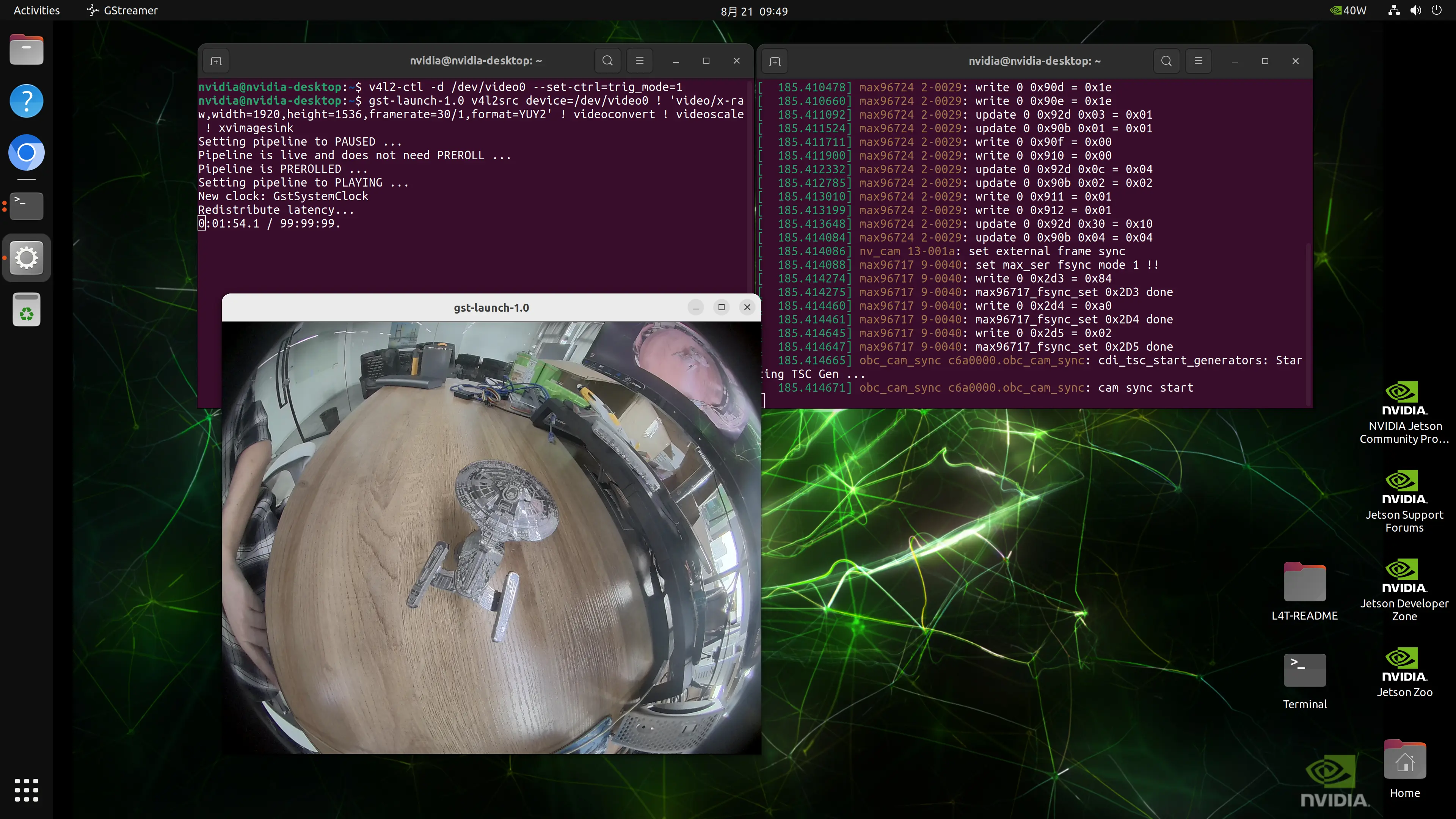
Gst Launch
gst-launch-1.0でビューアーを起動する
gst-launch-1.0 v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! videoscale ! xvimagesink
追加リソース
データシート
- SG3S-ISX031C-GMSL2-F
- SG3S-ISX031C-GMSL2-H
- SG8S-AR0820C-5300-G2A-H
- SG2-AR0233C-5200-G2A-H
- SG2-IMX390C-5200-G2A-H
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!最新ニュースとサポートを受けるために、以下のプラットフォームで私たちをフォローしてください。
