StackForce開発プラットフォームベースの二輪二足歩行ロボット入門
このチュートリアルは、開発者ができるだけ早く完全な車輪脚ロボットを構築できるよう、組み立てとデバッグの手順のみを提供します。車輪脚ロボットの基本原理を学習する必要がある場合は、DengGeのBilibiliチュートリアル動画を参照してください。二次開発については、他のウェブサイトやフォーラムでチュートリアルを検索できます。
概要
StackForce二輪二足歩行ロボットは、StackForce軽量ロボティクス開発プラットフォームをベースに開発されています。そのコアハードウェアは、StackForce シリーズのメインコントロールボード、モータードライバーボード、サーボドライバーボードで構成されています。
このロボットには、全身運動学モデルと状態適応自己安定化アルゴリズムが含まれています。StackForceプラットフォームのリアルタイム計算能力により、多姿勢制御、複雑な地形での自己安定化、階段降下、様々な斜面での安定移動をサポートします。プラットフォームはRCトランスミッター、Bluetooth、シリアル通信、ワイヤレス制御をサポートします。ユーザーは必要に応じてシステムをプログラムし調整できます。製品は完全なインストールチュートリアルとビデオコースを提供し、コストパフォーマンスの高いデスクトップ二輪二足歩行ロボットとなっています。

技術リンク
-
DengGeのBilibiliオープンソースチュートリアル動画: https://www.bilibili.com/video/BV1kz421B73V/?share_source=copy_web&vd_source=dd1f489993457f044ad480eab0e73bdc
-
車輪脚ロボットコースのオープンソースコード: https://gitee.com/StackForce/bipedal_wheeled_robot
-
StackForce軽量ロボティクス開発プラットフォームのドキュメント: http://stackforce.cc/#/
-
StackForce軽量ロボティクス開発プラットフォームのオープンソースロボットプロジェクト: https://gitee.com/StackForce
-
StackForce_ミニ車輪脚ロボットの理論とコード学習 https://github.com/Seeed-Projects/AI_Robotics_Academy/blob/main/Seeed_Mini_Wheeled_Legged_Robot/English/README.md
主な特徴
- オープンソースで低コスト:オープンソースライセンスに従い、すべてのソースコードと設計ファイルが完全に利用可能で、開発者が自由に学習、修正、二次開発を行えます。
- 高性能モーター制御:FOC(磁界指向制御)技術を搭載し、オープンループ/クローズドループ速度、位置、トルク制御をサポートし、精密な動作制御を実現します。
- 強力なハードウェアサポート:ESP32メインコントローラーを使用し、I2C、SPI、PWMなどの豊富なインターフェースにより、柔軟な機能拡張が可能です。
- 包括的な機能:自己バランス、高速移動、姿勢安定化、ワイヤレス制御をサポートし、様々な複雑な地形に適応します。
- 学習と使用が簡単:完全なサンプルコードとビデオチュートリアルが付属し、初心者の学習障壁を大幅に下げます。
仕様
| 仕様 | 詳細 |
|---|---|
| メインコントロールボード | StackForceメインコントロールボード |
| モータードライバーボード | 5Aデュアルチャンネルブラシレスモータードライバー(低電力) |
| モーター | 2208ジンバルブラシレスモーター |
| サーボドライバーボード | IMU統合マルチチャンネルサーボドライバー |
| 電源 | 12.6Vリチウムポリマーバッテリー |
| エンコーダー | MT6701 14ビット高精度磁気エンコーダー |
| ワイヤレス制御 | WiFiリモートコントロール + PS4 Bluetoothワイヤレスコントローラー |
| 総重量 | 540 g |
| 寸法 | 10.5 × 21.0 cm(L × W)、高さ 12.0–21.0 cm |
BOM
| 品目名 | 数量 | 単位 | 仕様 | 備考/規格 |
|---|---|---|---|---|
| 電子部品 | ||||
| StackForceメインコントロールボード | 1 | 個 | StackForce | |
| StackForce 5A低電力ドライバーボード | 1 | 個 | StackForce | |
| StackForceサーボボード | 1 | 個 | StackForce | |
| MT6701エンコーダー | 2 | 個 | StackForce | |
| 2208ジンバルモーター | 2 | 個 | ||
| DS041MG 500–2500サーボ | 4 | 個 | ||
| MC6C-MINIリモートコントローラー | 1 | 個 | ||
| MC7RBv2レシーバー | 1 | 個 | ||
| 12Vリチウムポリマーバッテリー | 1 | 個 | 19×34×42mm | |
| MR30-Uモーターコネクター | 2 | 個 | モーター用 | |
| SH1.0-5Pエンコーダーケーブル | 2 | セット | エンコーダー用 | |
| 3Pデュポンワイヤー(メス-メス) | 1 | セット | レシーバー用 | |
| 機械ハードウェア | ||||
| M3ロックナット | 4 | 個 | M3 | GB889.1-86 |
| M3ナット | 4 | 個 | M3 | DIN934 |
| ナイロンスタンドオフ | 4 | 個 | 5×3.2×9mm | ABS |
| M3ワッシャー | 4 | 個 | M3 | 304ステンレス |
| ラジアル磁石 | 2 | 個 | 6×2.5mm | |
| 丸頭ネジ M2×4 | 24 | 個 | M2×4 | GB/T845 |
| 丸頭ネジ M2×10 | 12 | 個 | M2×10 | GB/T845 |
| 丸頭ネジ M3×6 | 4 | 個 | M3×6 | GB/T845 |
| 丸頭ネジ M3×8 | 4 | 個 | M3×8 | GB/T845 |
| 丸頭ネジ M3×16 | 4 | 個 | M3×16 | GB/T845 |
| 丸頭ネジ M4×18 | 2 | 個 | M4×18 | GB/T845 |
| M2×6タッピングネジ | 16 | 個 | M2×6 | GB/T845 |
| 皿頭ネジ M2×6 | 46 | 個 | M2×6 | 304ステンレス |
| 皿頭ネジ M3×6 | 16 | 個 | M3×6 | 304ステンレス |
| M3×7+4銅スタンドオフ | 4 | 個 | M3×7+4 | 銅 / GB |
| 6704ZZベアリング | 4 | 個 | Ø27×Ø20×4mm | |
| 6701ZZベアリング | 6 | 個 | Ø18×Ø12×4mm | |
| 構造部品 | ||||
| 3Dプリント部品 | 29 | 個 | ||
| 1:10耐摩耗6030-6085タイヤ | 2 | 個 |
目次
組み立て済みバージョンチュートリアル
StackForce車輪脚ロボット基本操作マニュアル(PDF)
PDFドキュメントで指定された順序でロボットを起動するだけで、リモートでロボットを制御できます。
キットバージョンチュートリアル1 - 組み立て
組み立てには多くのステップがあるため、ガイドに注意深く従ってください。一部の穴はタッピングネジ用に作られており、パッケージ内のネジがチュートリアルのものと異なる場合がありますが、これは正常です。これは組み立てに影響せず、必要に応じて適切な代替ネジを使用できます。
組み立て中は、ネジの締め付けに注意してください。ネジ山を潰したり損傷したりしないよう、過度に締めすぎないでください。
キットバージョンチュートリアル2 - キャリブレーション
まず、キャリブレーションに必要なコードファイルをダウンロードしてください。
環境セットアップ
ステップ1: Visual Studio Codeをダウンロードします。

ステップ2: Visual Studio Codeを開き、拡張機能マーケットプレイスからPlatformIO IDE拡張機能を検索してインストールします。
インストールをクリックすると、PlatformIOは必要な追加コンポーネントを自動的にダウンロードします。 場合によっては、MinGWが不足している可能性があり、新しいフォルダーの作成ができなくなります。 この場合、MinGW-w64を手動でインストールする必要があります。
ステップ3:MinGW-w64をダウンロード
車輪脚ロボットツールパックダウンロードリンク(MinGW-w64を含む)
ファイルをダウンロード後、解凍してツールパック内のmingw64フォルダを見つけます。
解凍し、英語文字のみを使用するディレクトリにインストールします。
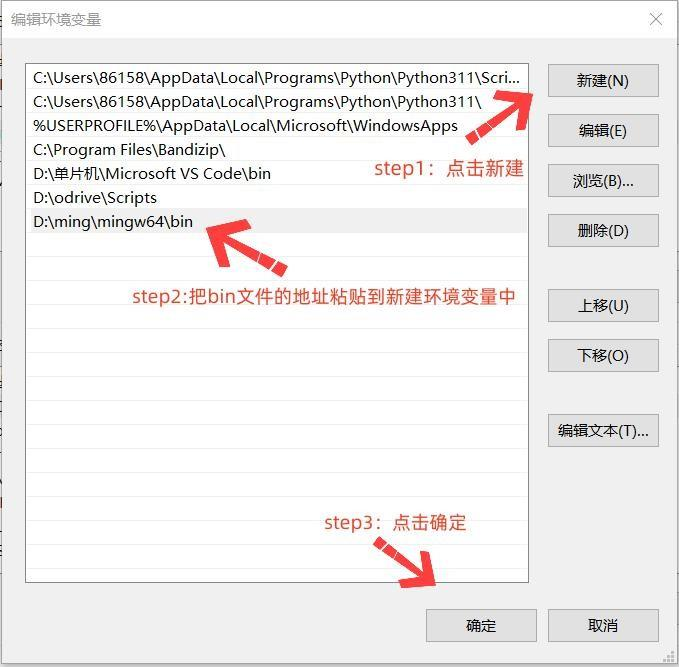
解凍したフォルダを開く → binフォルダを開く → binディレクトリのパスをコピー
(例:D:\ming\mingw64\bin)。
環境設定:
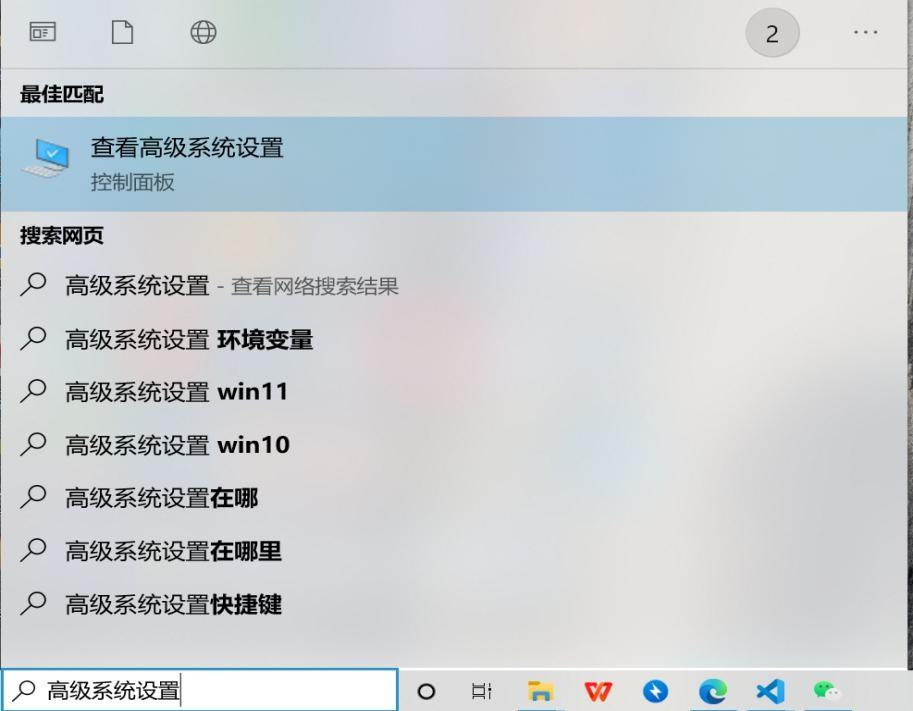
コンピューターでシステムの詳細設定を検索して開く → 環境変数 → システム変数 → Path → 新規 → 先ほどコピーしたbinパスを貼り付け → OKをクリック。
- 1:
システムの詳細設定を検索して開きます。
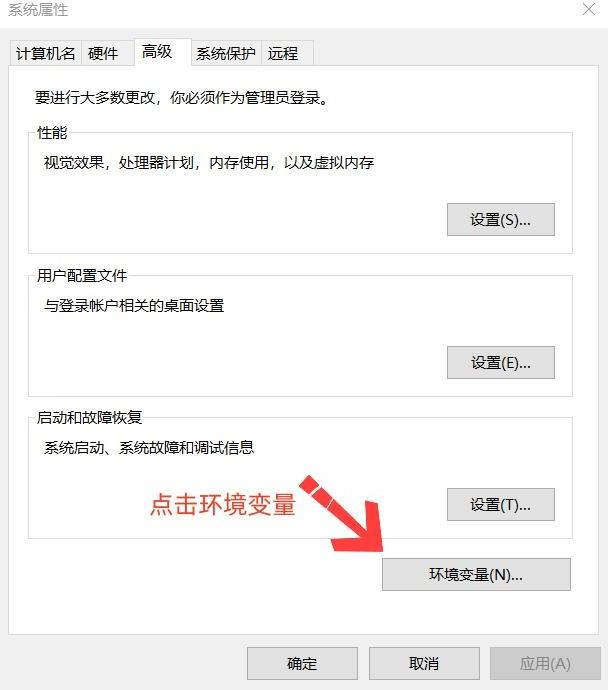
- 2:
環境変数をクリックします。
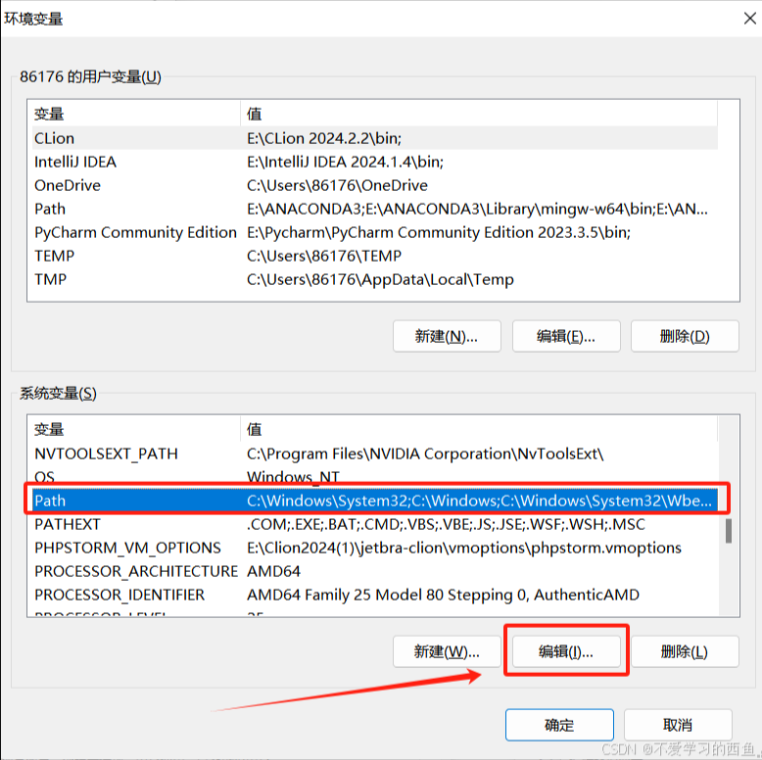
- 3:システム変数の下の
Pathをダブルクリックします。
- 4:新しい環境変数エントリを作成します。
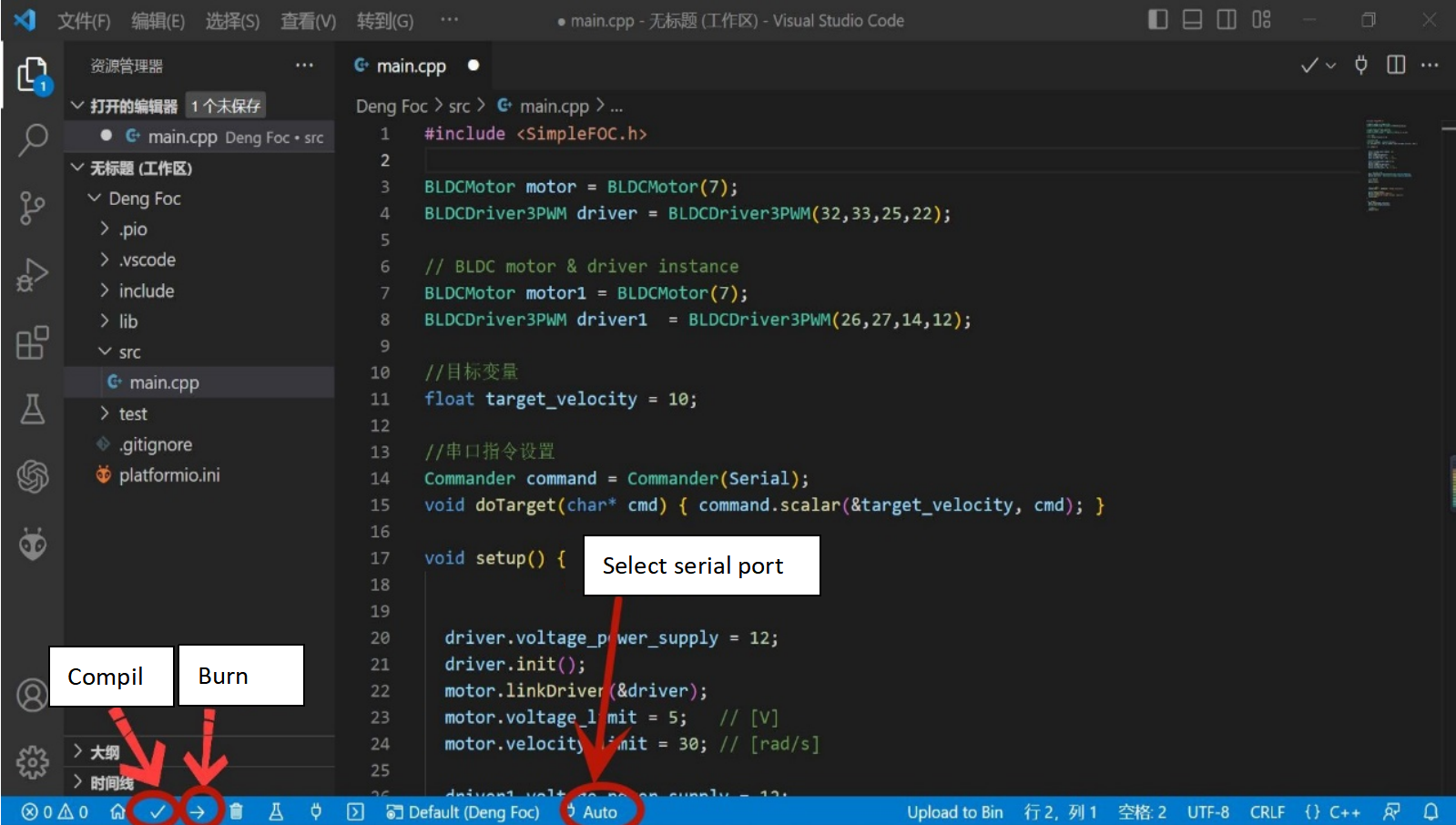
ステップ 4: コンパイルとアップロードボタンの説明
(√: プログラムをコンパイル →: プログラムをハードウェアにアップロード Auto: シリアルポートを選択)
以下はアップロードボタンの説明です。まだプログラムをアップロードしないでください。開発者はまずここでアップロードプロセスを確認できます。
コンピュータをハードウェアに接続した後、Autoをクリックします(オプション)。
システムが自動的にシリアルポートを検出し、推奨します。
シリアルポートを選択した後、Compile(オプション)とUploadをクリックして、プログラムをハードウェアに書き込みます。
S1 書き込みとデバッグ
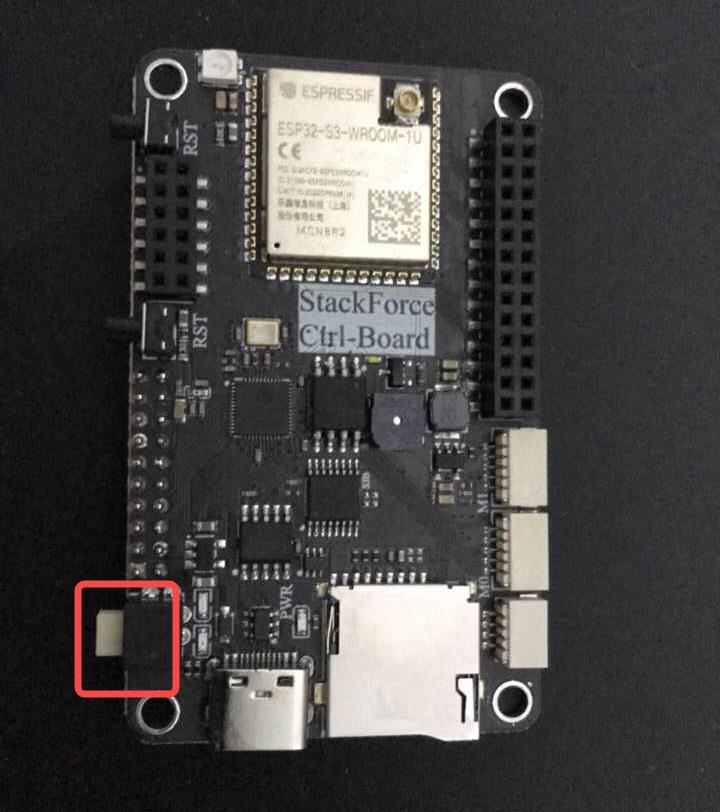
S1 チップの接続
USB ケーブルを接続します。USB コネクタの隙間がある側を上向きに、隙間がない側を下向きにします。白いボタンを離してS1 チップに切り替えます(黄色いライトが点灯します)。
注意: なぜ上下があるのですか?
ボードには 2 つのチップがあります。S1 はモータープログラム用、S3 はサーボ制御プログラム用です。Type-C コネクタは通信用に 2 つの別々のピン列を使用しています。各チップは書き込み用に異なる列を使用します。白いボタンは、コンピュータがどちらのチップに書き込むかを切り替えます。
S1 プログラムの書き込み
方法 1: 事前に書き込まれた S1 モーター制御プログラムに従って、Vofa シリアルアシスタントのダウンロードと使用ガイドにスキップできます。
方法 2: S1 モーター制御プログラムの再書き込み(推奨しません)
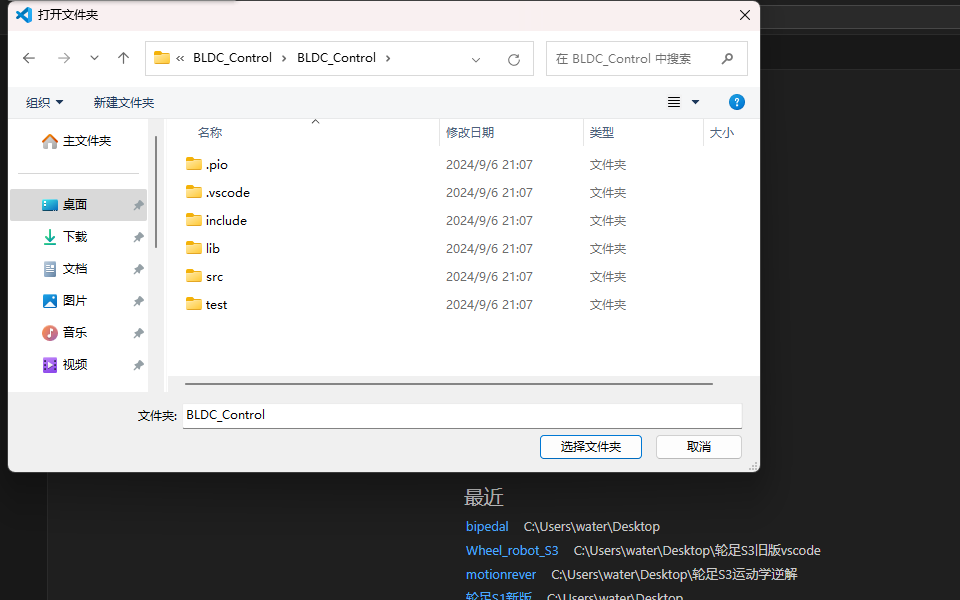
VS Code でプロジェクトBLDC_Controlを開きます。
これにより PlatformIO が必要なライブラリを自動的にインストールするため、プロジェクトフォルダを直接 VS Code にドラッグしないでください。代わりに、新しい VS Code ウィンドウを開き、File → Open Folderを使用してください。
S1 プログラムが保存されているフォルダを見つけて、Select Folder をクリックします。
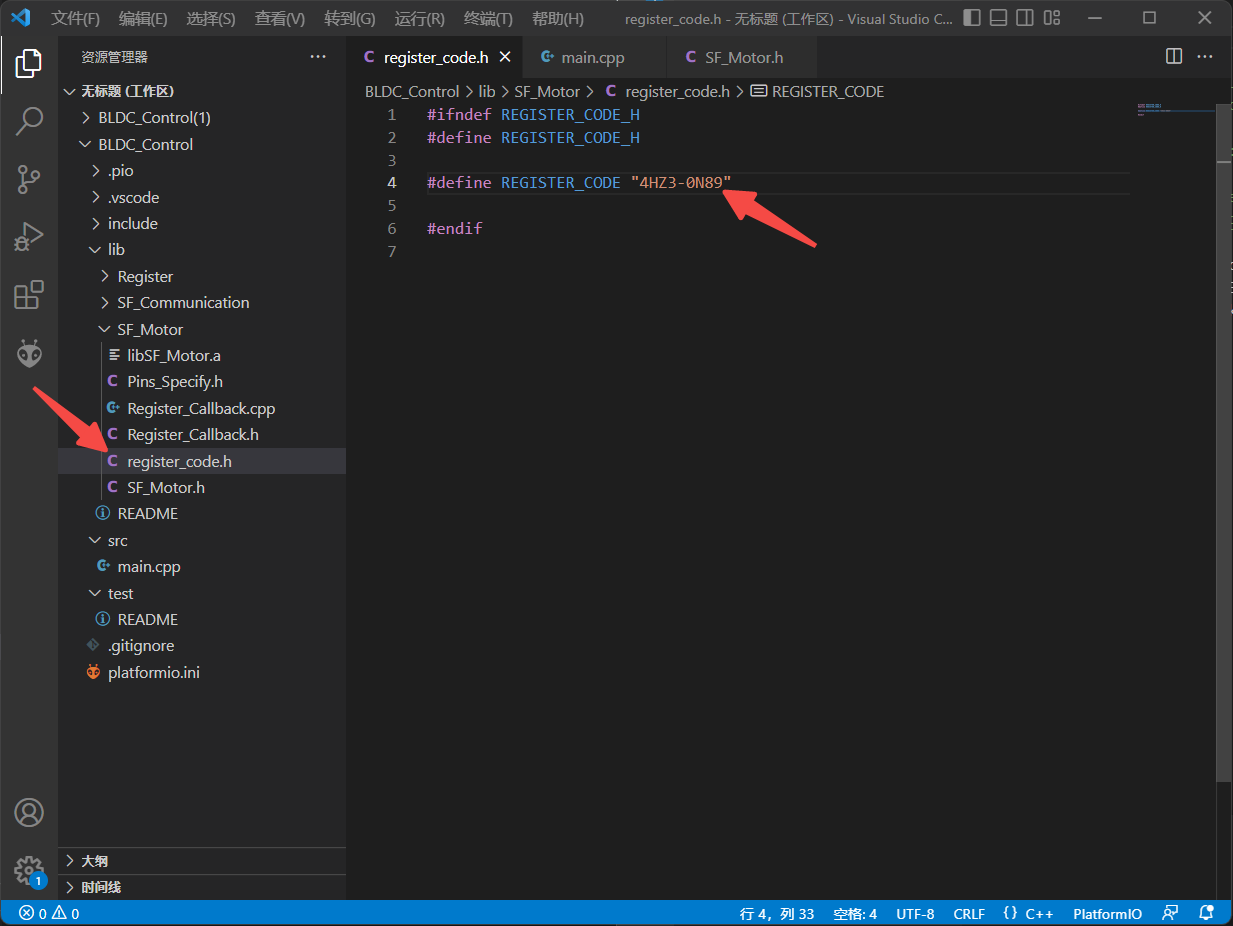
書き込み前に、登録コードと通信モードを変更する必要があります:
登録コードの変更:
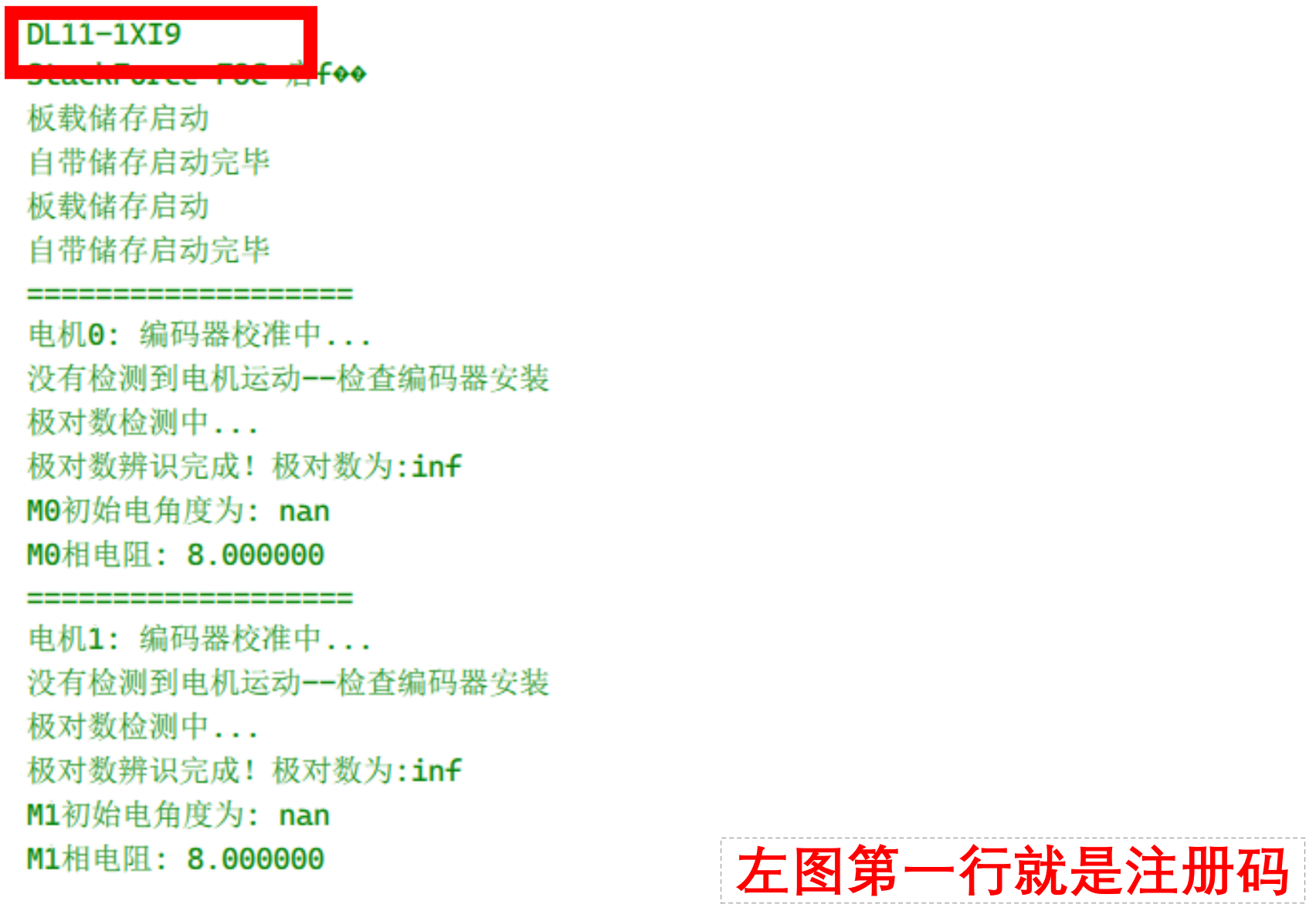
各ボードには固有の登録コードがあります。
登録コードはメイン制御ボードパッケージに貼られたラベルに印刷されています。
そのコードを対応するフィールドに入力してください。
また、S1 シリアル出力から登録コードを読み取ることもできます(インストールガイドで前述)。
通信モードの変更:
画像に示された場所の値をONBOARDに変更します。(USB = S1 チップとコンピュータ間のシリアル通信、ONBOARD = S1 と S3 チップ間の通信)
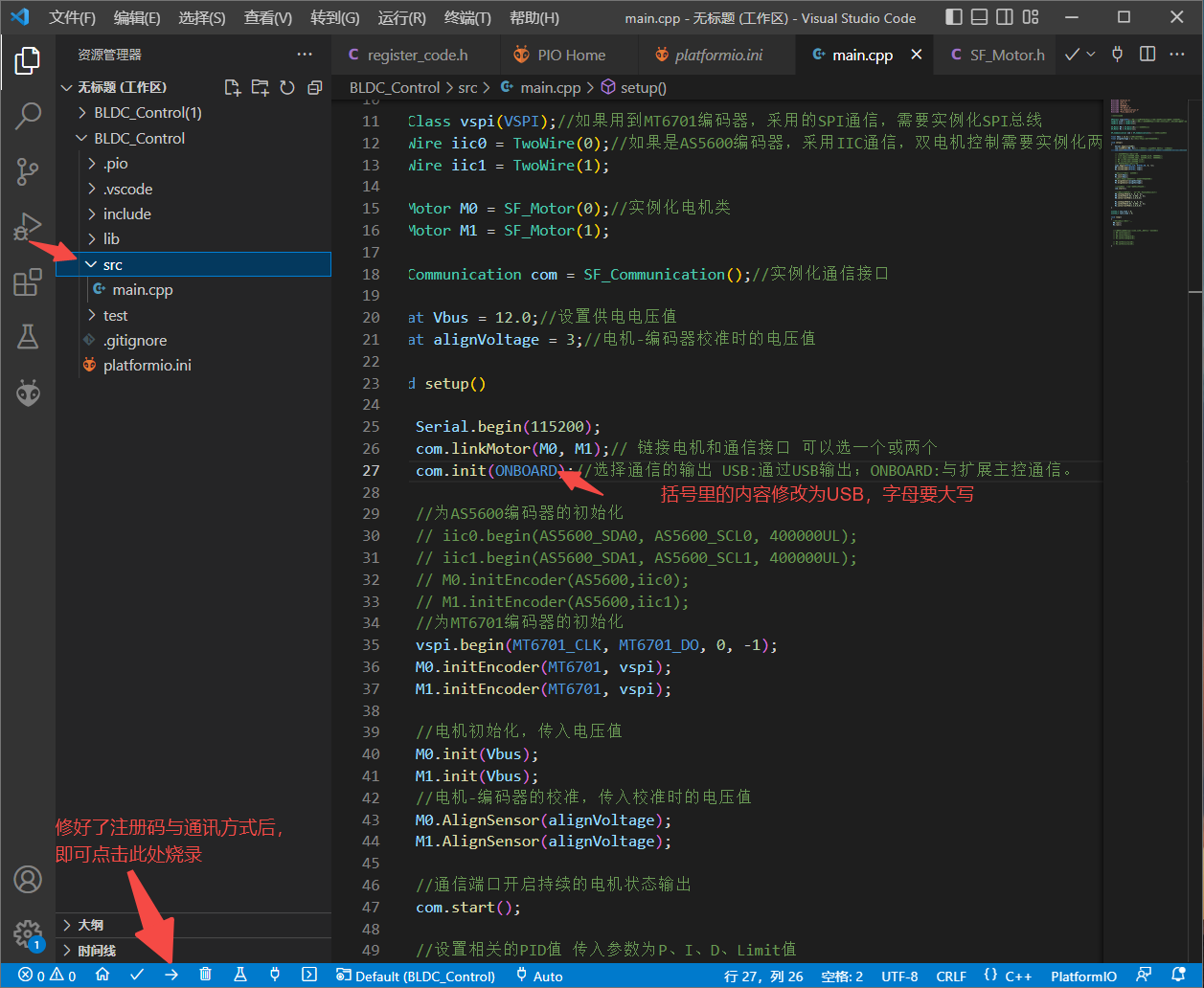
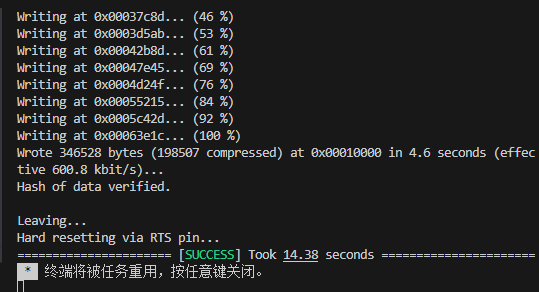
変更後、左下角の→アイコンをクリックしてプログラムを書き込みます。
書き込み中の一般的な問題と解決方法:
- 書き込み成功の結果
- これは S3 チップで、S1 プログラムと一致しません
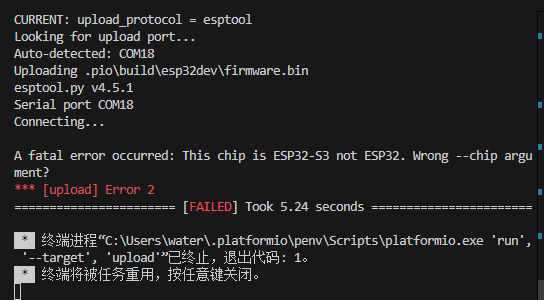
解決方法:
USB ケーブルが逆さまに差し込まれているかどうかを確認してください — 隙間がない側を上向きにする必要があります。
白いボタンが離されているかどうかを確認してください。離されると、黄色い LEDが点灯し、ボードがS1 書き込みモードであることを示します。
- シリアルポートが占有されています
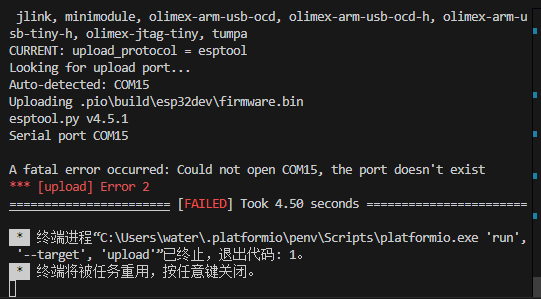
解決方法:
他のプログラムがシリアルポートを使用しているかどうかを確認してください。
Vofa シリアルモニターが閉じられていることを確認してください。
他のすべてのシリアルアシスタントがポートを解放していることを確認してください。
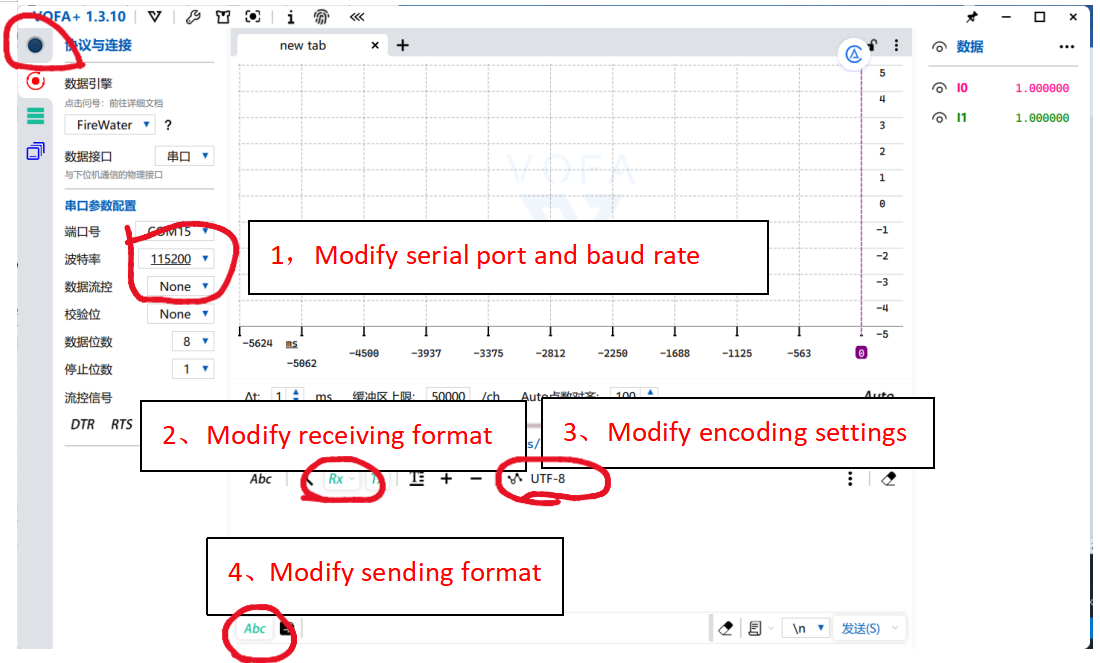
Vofa シリアルアシスタントのダウンロードと使用ガイド
次に、シリアルアシスタントを開き、ボーレートを115200に設定してシリアル出力を確認します。Vofa シリアルアシスタントのダウンロードリンク:Download Center | VOFA-Plus
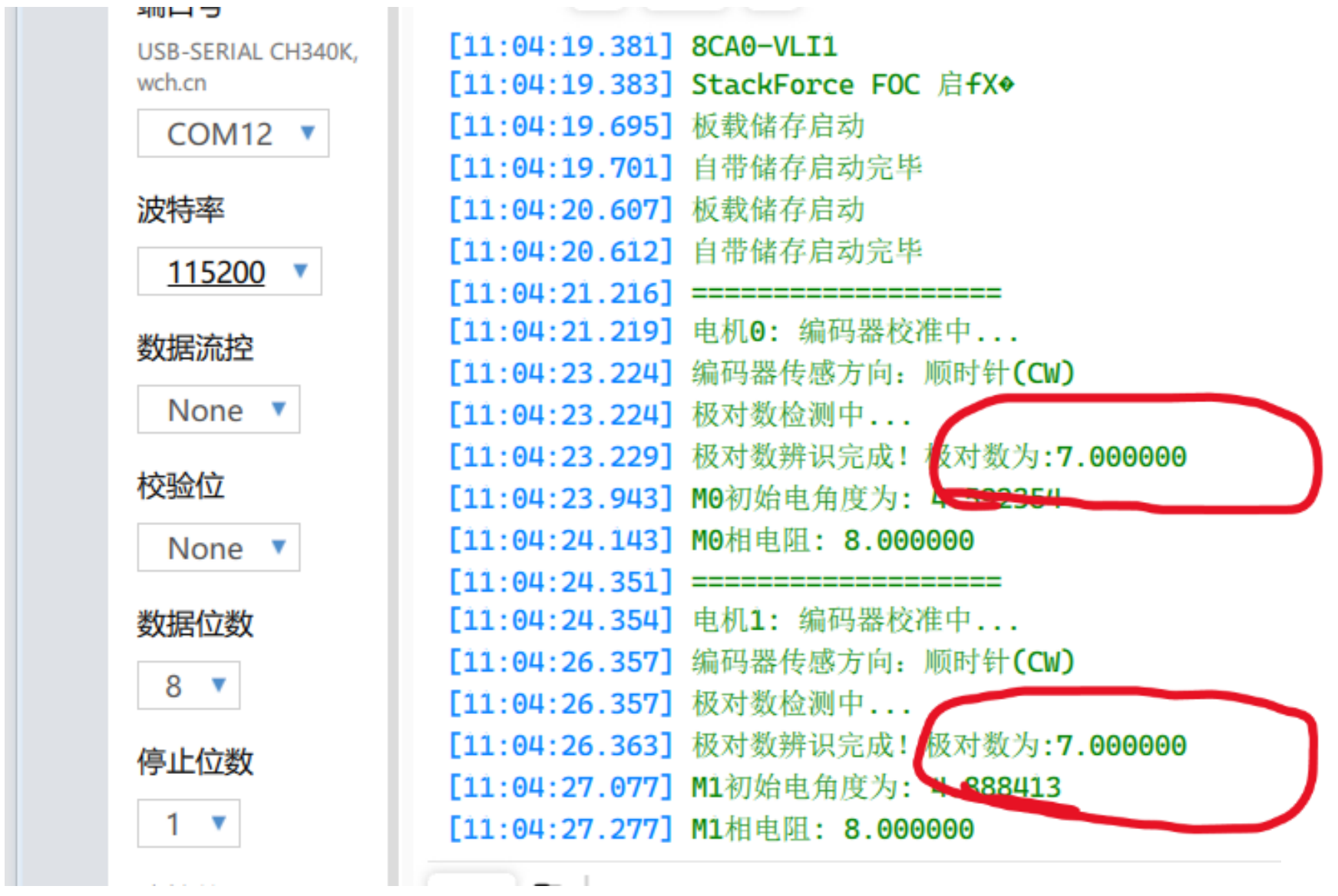
S1 モーター制御プログラムのデバッグ – 極対数キャリブレーション
ロボットを持ち上げて車輪を地面から離し、S1 リセットボタンを押します。
極対数情報が Vofa に表示されます。車輪のセルフテスト回転が完了するまで待ちます。
検出された極対数値が7の場合、キャリブレーションは成功です。以下に示すとおりです:
極対数値がinfや他のテキストを示す場合は、電源が入っているかどうかを確認し、配線を確認し、磁石が正しく取り付けられていることを確認してください。
検出値が 6、8、または 7 以外の場合、車輪が締めすぎている可能性があります
(車輪脚の取り付けガイドを参照し、モーターベアリング取り付けを検索して再取り付けしてください)。
車輪が地面や他の物体に触れている可能性もあります。 ロボットの電源を入れるたび、または S1 がリセットされるたびに、セルフテストが正常に実行されるよう車輪を地面から離す必要があります。
プロセスを繰り返し、極対数が7を示すまでS1 リセットボタンを押してください。
S3 オフセット値の取得
S1 の書き込みが完了したら、S3 チップに切り替えて S3 プログラムを書き込みます。(USB ポートの隙間が下向きになるようにしてください。画像に示されたボタンを押します — ライトが緑色になると、システムが S3 に切り替わったことを示します。)
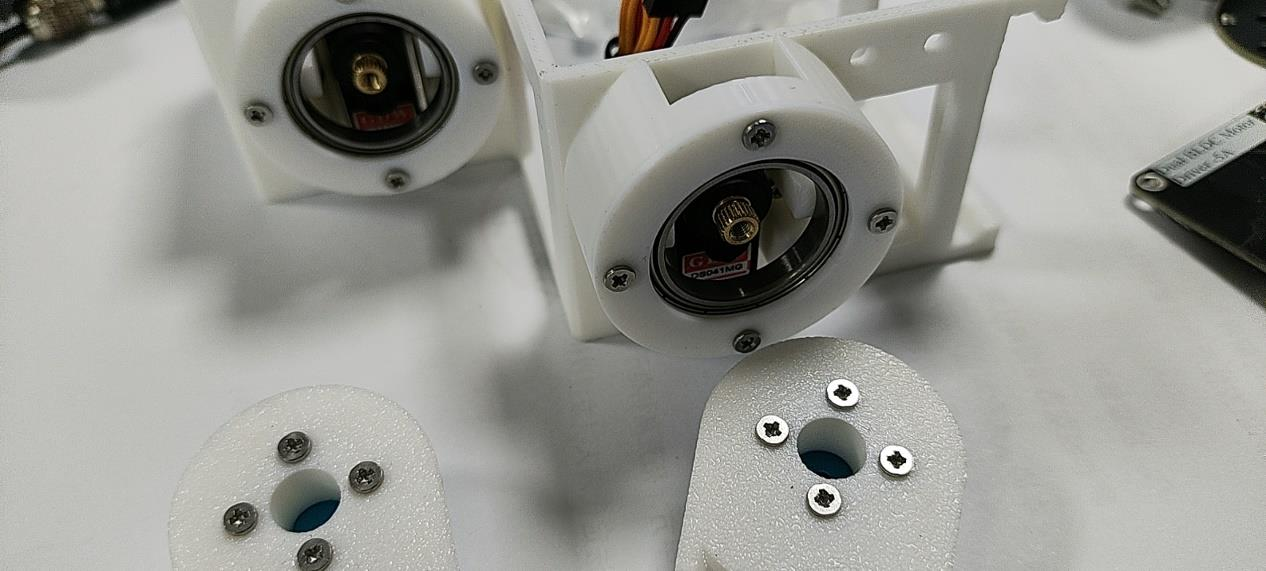
プログラムを書き込む前に、必ず太ももアセンブリを取り外してください。
-
- VSCode で**bipedal_calibrate フォルダ(オフセット値キャリブレーションプログラム)**を開き、プログラムを直接書き込み、その後 Vofa を開いてボーレートを
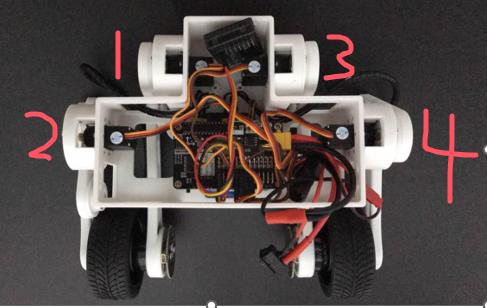
115200に設定します。0,0,0,0のようなシリアル出力が表示されます。これはサーボ 1、2、3、4のオフセット値を表します。
- VSCode で**bipedal_calibrate フォルダ(オフセット値キャリブレーションプログラム)**を開き、プログラムを直接書き込み、その後 Vofa を開いてボーレートを
-
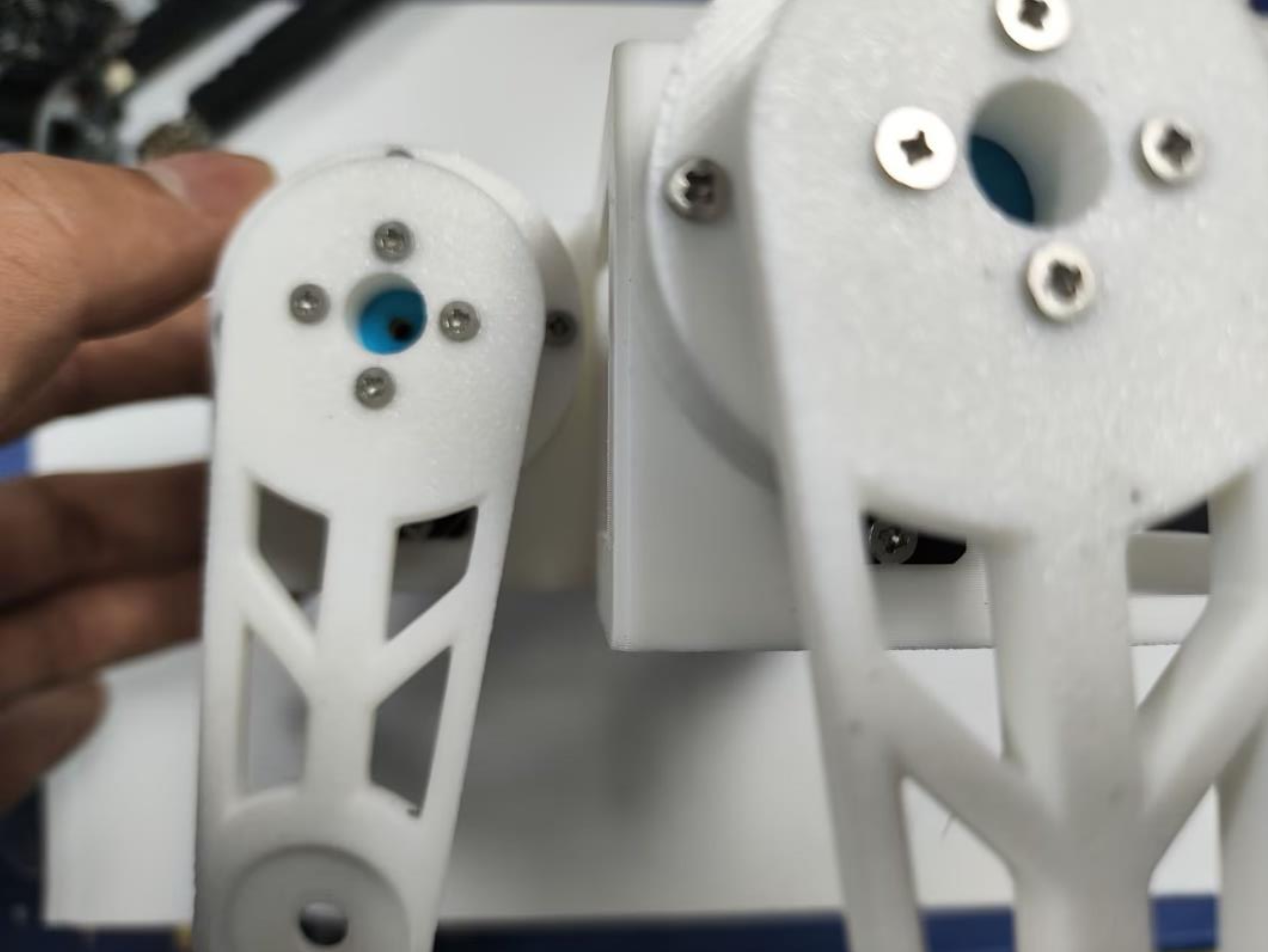
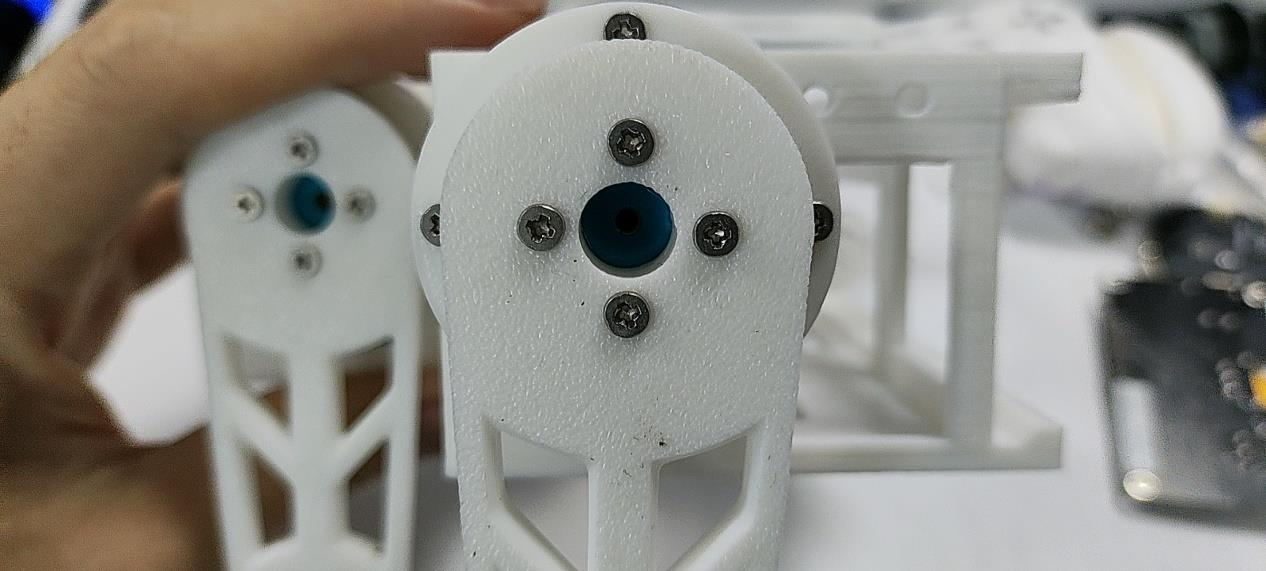
- バッテリーの電源を入れます。サーボの回転が完了したら、脚を可能な限り地面に対して垂直になるように取り付けます。
-
- シリアルターミナルで、
1,2,3,4のようなコマンドを入力してサーボを制御し、脚が完全に垂直になるまで調整します。 方向ガイド: 脚があなたの方を向いているとき、時計回りは負、反時計回りは正です。
- シリアルターミナルで、
例:上の画像では、サーボ 1 が少し左に傾き、サーボ 2 が少し右に傾いています。
5,-6,0,0を入力してサーボ 1 と 2 を垂直に戻します。(5はサーボ 1 を反時計回りに 5 単位回転、-6はサーボ 2 を時計回りに 6 単位回転を意味します。)
同じ方法でサーボ 3 と 4 を調整します:
0,0,x,0を使用してサーボ 3 を制御し、0,0,0,xを使用してサーボ 4 を制御します。
すべてのオフセット調整が完了したら、サーボハウジング内の黒いネジを締めて脚を固定します。
現在のオフセット値を記録してください — 以下の S3 サーボ制御プログラムに書き込む必要があります。
S3 キャリブレーションとデバッグ
StackForce 車輪脚ロボット基本操作マニュアル(PDF)
1. オフセット値の変更
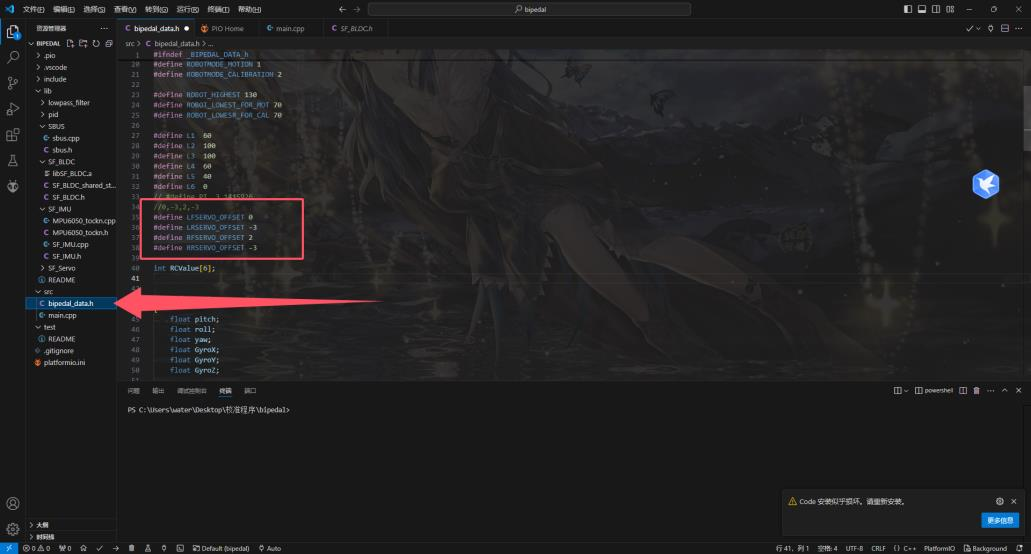
VS Code でbipedalフォルダ(サーボ制御プログラム)を開きます。
bipedal_data.hファイルで、OFFSETの下のオフセット値を更新します。
前のプログラムから取得したオフセット値を、以下に示す対応する位置に入力します。
2. サーボデバッグ
- プログラムを書き込んだ後、USB を抜きます。
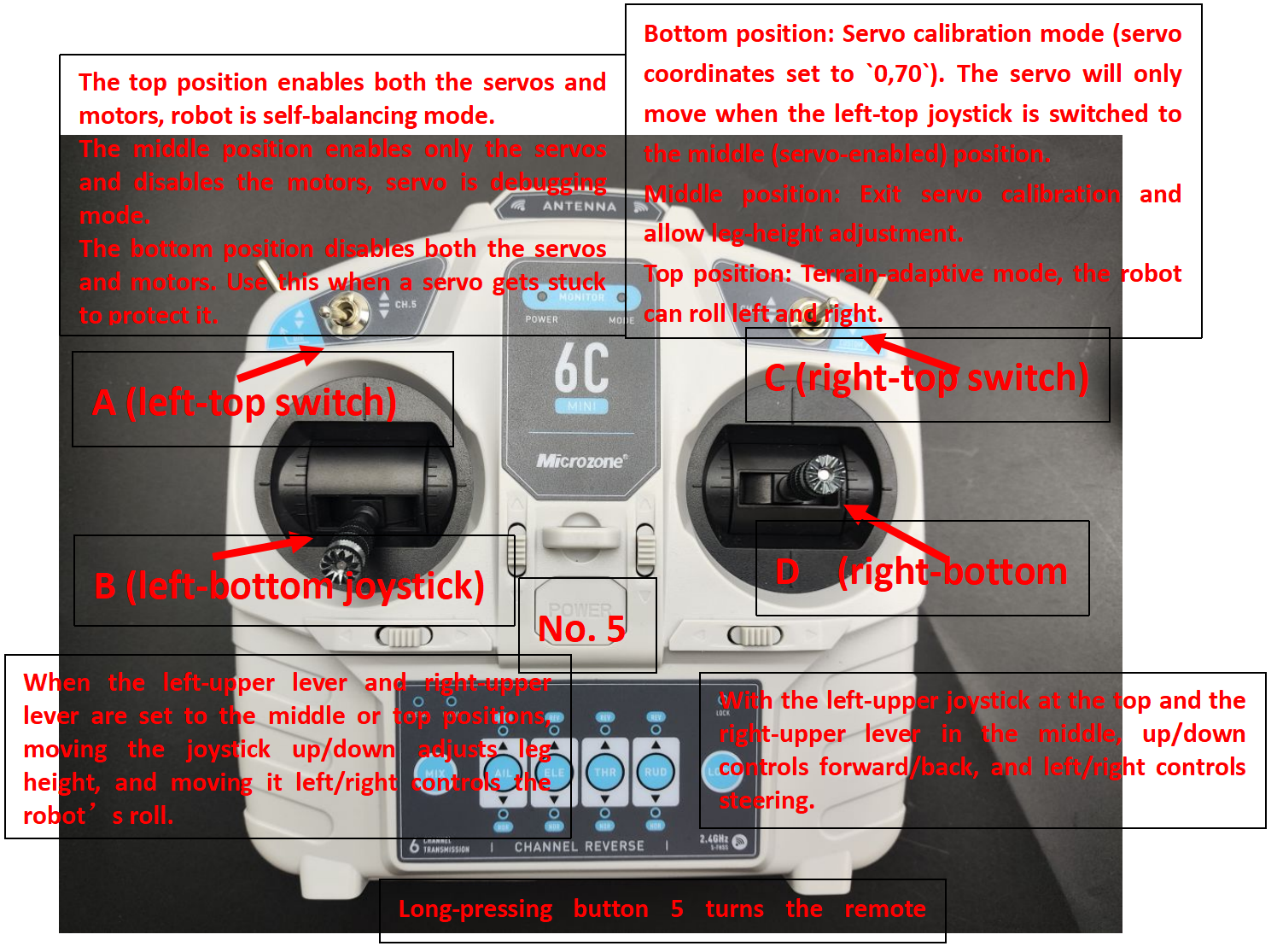
5 を長押ししてリモートコントローラーの電源を入れます。 スイッチを設定:A(左上)を中央、B(左下)を下、C(右上)を下。 - ロボットを持ち上げて水平に保ち、ジャイロキャリブレーションとモーターキャリブレーションが進行できるようにします。 電源ボタンを押してロボットの電源を入れます。
- セルフチェックが完了するまで約 10 秒待ちます。
A を中央に設定してサーボを有効にします。初期位置に戻ります。C を中央に設定してサーボキャリブレーションを終了します。 Bをスライドして脚の高さ(車輪のY座標)を調整します。 スライダー D を動かして車輪を前後に移動させます(車輪の X 座標)。 - 車輪脚ロボットの動作に関する注意:
D を 前方 に押すと、サーボが回転して車輪の X 座標が 後方 に移動します。車輪脚ロボットが前方に傾き、ロボットが前進 します。
3. SpdDir の設定
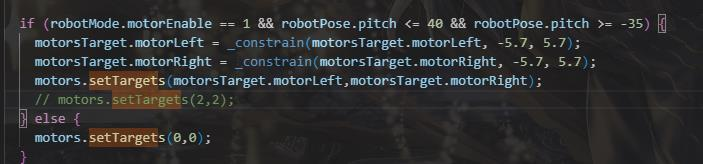
モーターの固定回転方向を設定します。main ファイルで motors.setTargets を検索し、motor 0 と motor 1 の torque を 2 に設定します。
Vofa を使用してモーター速度を確認します。Vofa のボーレートを 921600 に設定し、S3 に接続します。

プログラムを S3 にフラッシュし、Vofa を開き(ボーレート 921600)、リモートコントローラーの A switch up でモーターを有効にし、電源を入れ、ロボットを持ちながら セルフチェック を完了させます。(まず Vofa–S1 でセルフチェックが通過したかを確認することもできます。)
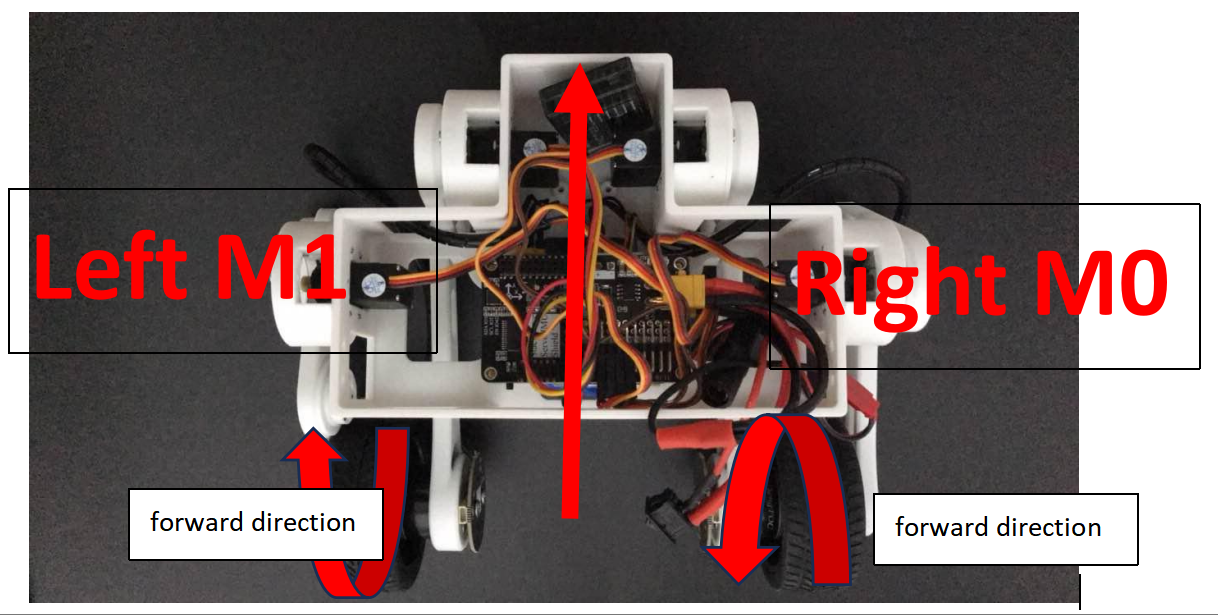
モーターの回転を確認:
-
左モーター:前進回転は 正の 速度を表示する必要があります。
3番目の値(M1 速度)が負の場合、motorStatus.M1SpdDirを反転させます。正の場合は変更不要です。 -
右モーター:後進回転は 負の 速度を表示する必要があります。
2番目の値(M0 速度)が負の場合は変更不要です。正の場合はmotorStatus.M0SpdDirを反転させます。
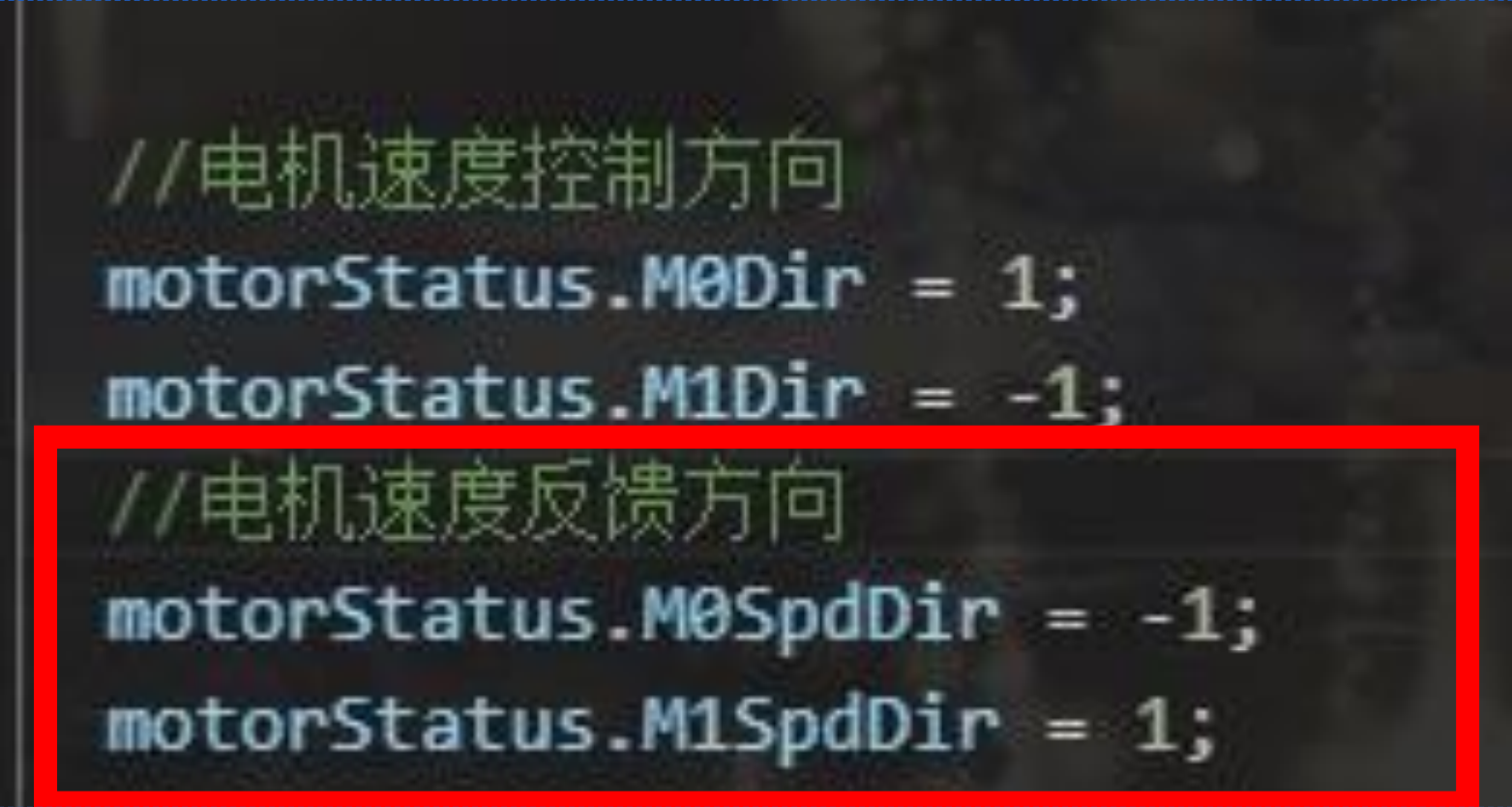
上記の説明がまだ不明確な場合は、以下の簡略化されたルールを参照してください:
車輪が 前進 し、Vofa が 負の 値を表示する場合、フィードバック dir を 反転 します。
車輪が 前進 し、Vofa が 正の 値を表示する場合、フィードバック dir を変更 しません。
車輪が 後進 し、Vofa が 正の 値を表示する場合、フィードバック dir を 反転 します。
車輪が 後進 し、Vofa が 負の 値を表示する場合、フィードバック dir を変更 しません。
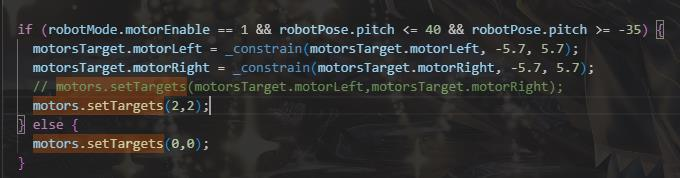
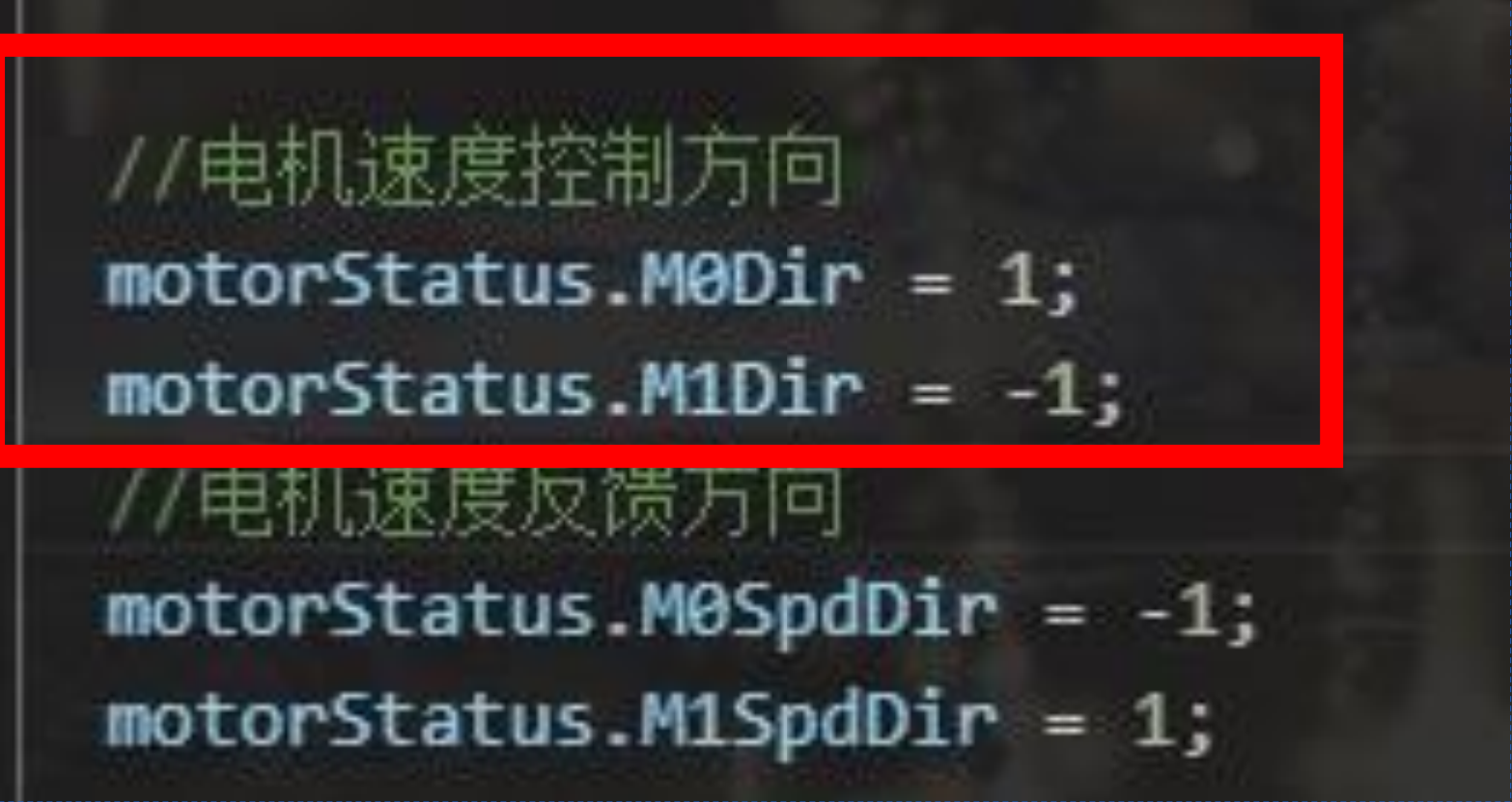
4. モーター制御 dir の設定(motors.setTargets を検索)
画像に示すようにモーター制御行のコメントを外し、その下の行をコメントアウトしてから、プログラムをフラッシュします。
ロボットの電源を入れます。リセットが完了したら、ロボットを持ちながら前方に傾けます。両方の車輪が前進回転する場合、バランス方向は正しいです。
左車輪が後進回転する場合は M1Dir を反転 します。右車輪も同様に調整します。
これらの手順を完了すると、ロボットを制御できるようになります。以下に操作方法を説明します。また、ドキュメント StackForce Wheeled_Legged_Robot Basic Operation Manual (PDF) も参照できます。
前面のジョイスティック:
-
ステップ 1: 左上のスイッチを
middle、右上のスイッチをdown、左下のスティックをlowestに設定します。ロボットを持ち、脚を自然に垂らし、車輪を地面から離し、本体を水平に保ちます。電源を入れ、約
10秒待ってから、ロボットを地面に置いて直立させます。 -
ステップ 2: 右上のスイッチを
middleに設定し、左下のスティックをわずかに上に押し、左上のスイッチをupに設定します。ロボットがセルフバランスモードに入ります。右下のスティックの
前後で前進/後退、左右で左右回転を行います。左下のスティックの
上下で脚の高さを調整します。右上のスイッチが
topの時、左下のスティックの左右でロール制御を行います。ロールモードを終了するには電源を切ります。
ライブデモ
(実際のデモビデオは後日追加予定)
引用
StackForce Wheeled_Legged_Robot Basic Operation Manual (PDF)
Mini-Wheeled-legged robot installation document.pdf
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。