YOLOv8nオブジェクト検出に関するRaspberry Pi 5とAIキットのチュートリアル
はじめに
YOLOv8(You Only Look Once version 8)は、リアルタイム姿勢推定とオブジェクト検出モデルの人気のあるYOLO シリーズです。速度、精度、柔軟性において複数の進歩を導入することで、前身の強みを基盤としています。Raspberry-pi-AI-kitは推論速度を加速するために使用され、Hailo-8Lチップを中心に構築された13 TOPSニューラルネットワーク推論アクセラレータを特徴としています。
このwikiでは、Raspberry Pi 5上のAIキットでYOLOv8nをオブジェクト検出に使用する方法を、トレーニングからデプロイまでガイドします。
ハードウェアの準備
Hailo8L 13 TOPS用


Hailo8 26 TOPS用





ハードウェアのインストール
こちらを参照してください
ホストコンピュータ上で
hailoソフトウェアをインストールしますので、hailoアカウントを持っていることを確認してください。
Ultralyticsのインストールとモデルのトレーニング
python3.11をインストール
sudo apt install python3.11
yolo_envを仮想環境として作成
python3.11 -m venv yolo_env
環境をアクティベート
source yolo_env/bin/activate
ultralyticsをインストール
pip install ultralytics
COCOデータセットを使用してYOLOv8nをトレーニングします。独自のデータセットをトレーニングしたい場合は、その方法についてこちらを参照してください。
mkdir yolomodel && cd yolomodel
yolo detect train data=coco128.yaml model=yolov8n.pt name=retrain_yolov8n epochs=100 batch=16
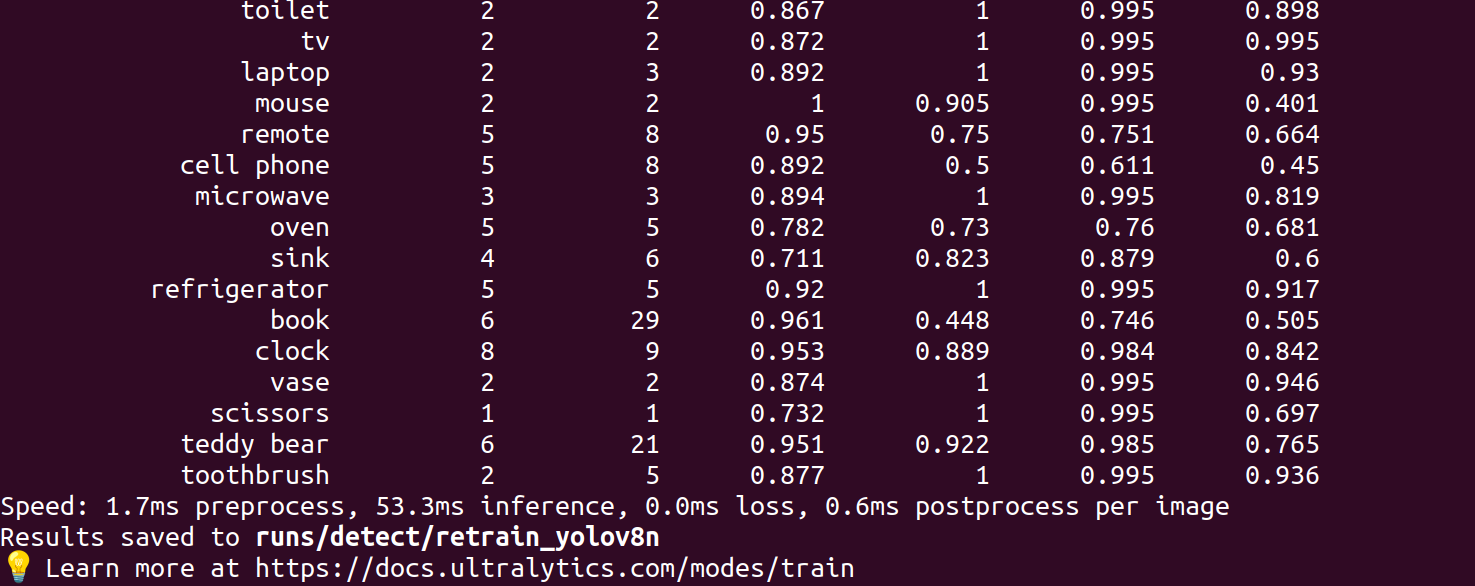
トレーニング後、以下に示すようにbest.ptモデルが得られます:
cd ./runs/detect/retrain_yolov8n/weights/
ls

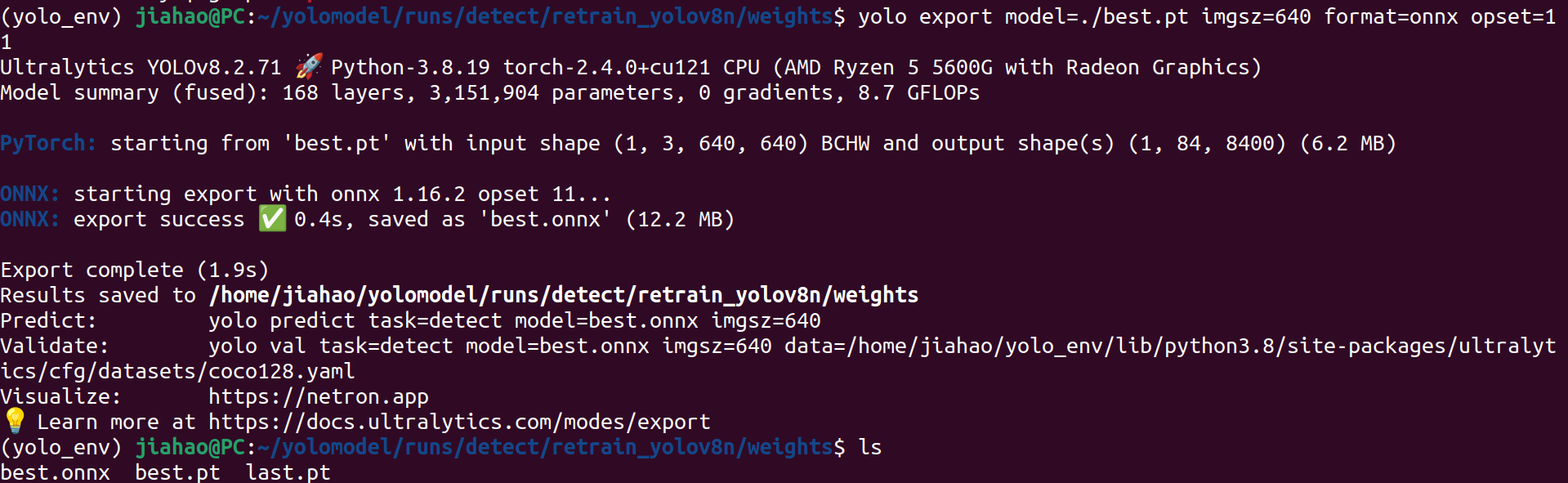
.ptモデルを.onnxに変換します。
yolo export model=./best.pt imgsz=640 format=onnx opset=11
結果は以下のようになります:
hailoソフトウェアのインストール
python 3.8をインストール
cd ~
sudo apt install python3.8
hailo_envを仮想環境として作成
python3.8 -m venv hailo_env
環境をアクティベート
source hailo_env/bin/activate
Hailo Dataflow Compiler 3.27をインストールします。ここでHailoに登録してログインし、ソフトウェアをダウンロードする必要があります。
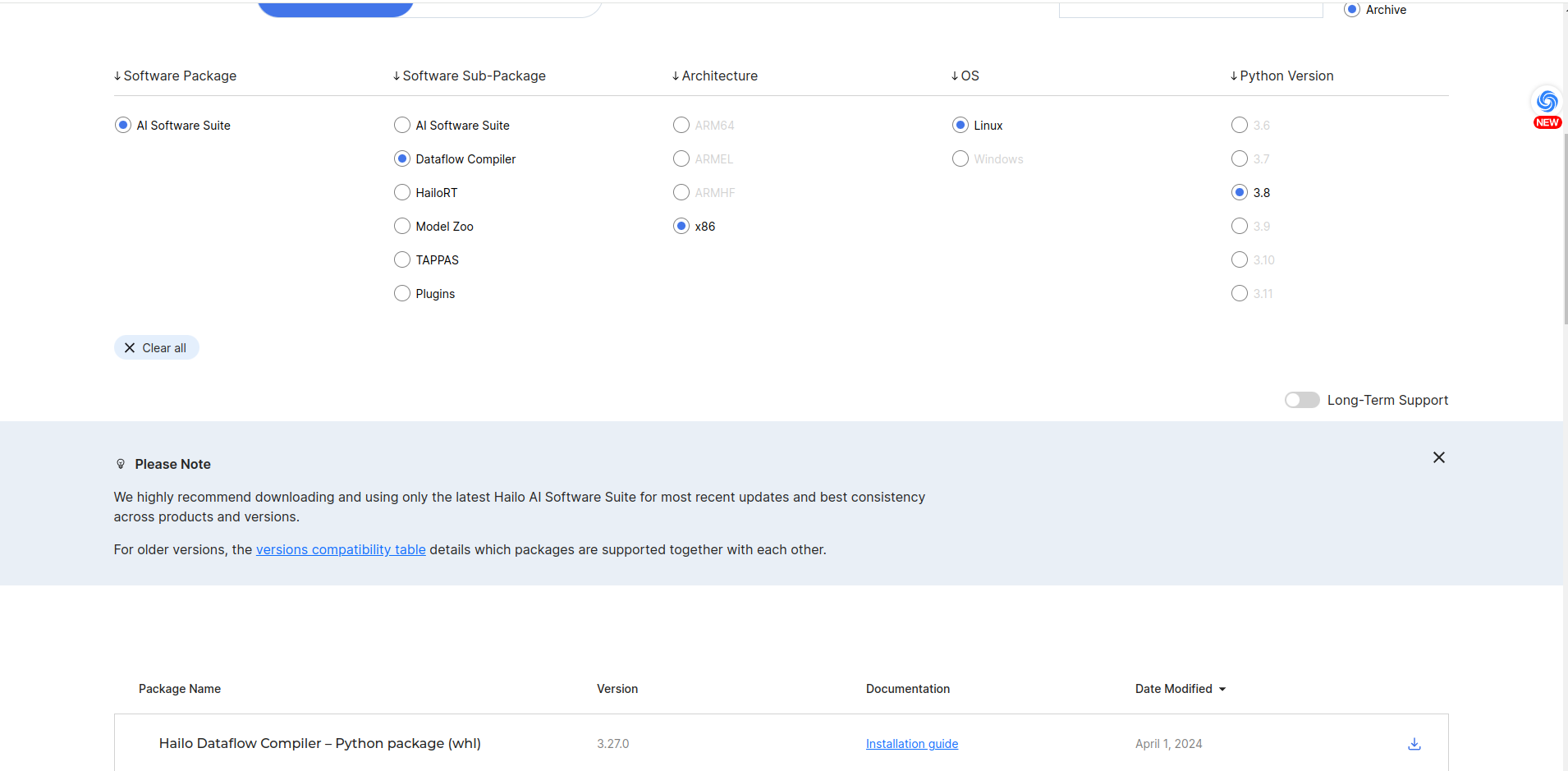
pip install hailo_dataflow_compiler-3.27.0-py3-none-linux_x86_64.whl
Model zooをインストールします。ここでHailoに登録してログインし、ソフトウェアをダウンロードする必要があります。
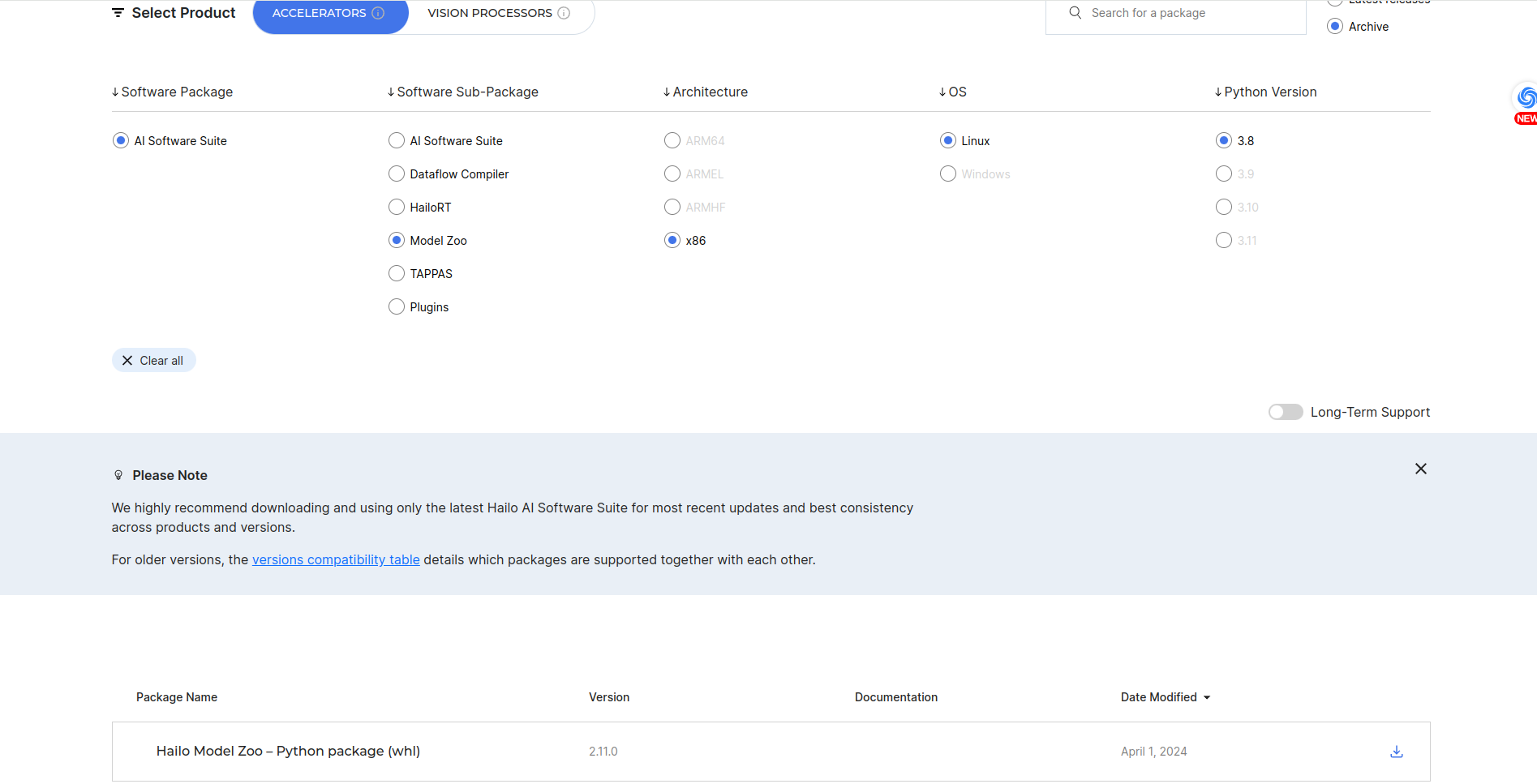
pip install hailo_model_zoo-2.11.0-py3-none-any.whl
hailo_model_zooが正しく機能しているかテストします。
hailomz -h
hailo_model_zooのgithubファイルをインストール
cd yolomodel/runs/detect/retrain_yolov8n/weights
git clone https://github.com/hailo-ai/hailo_model_zoo.git
yolov8nモデルの評価/最適化/コンパイル用にcocoデータセットをインストール
python hailo_model_zoo/datasets/create_coco_tfrecord.py val2017
python hailo_model_zoo/datasets/create_coco_tfrecord.py calib2017
hailo_model_zooを使用してモデルを解析
hailomz parse --hw-arch hailo8l --ckpt ./best.onnx yolov8n

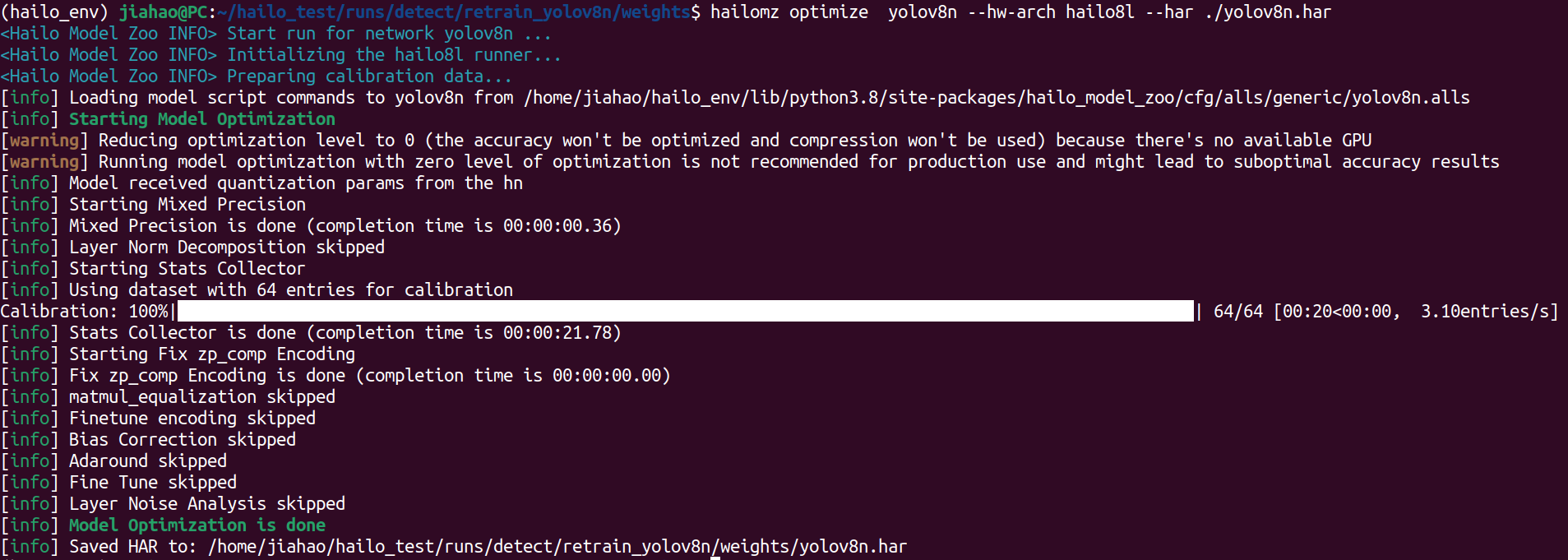
hailo_model_zooを使用してモデルを最適化
以下のコマンドを実行すると、いくつかのエラーが発生する可能性があります。しかし、./hailo_model_zoo/hailo_model_zooをローカルライブラリにコピーできます。エラーがデータセットが見つからないことを示している場合は、~/.hailomzに移動してデータセットを見つけ、ローカルデータセットディレクトリにコピーできます。
hailomz optimize --hw-arch hailo8l --har ./yolov8n.har yolov8n
hailo_model_zooを使用してモデルをコンパイル
hailomz compile yolov8n --hw-arch hailo8l --har ./yolov8n.har
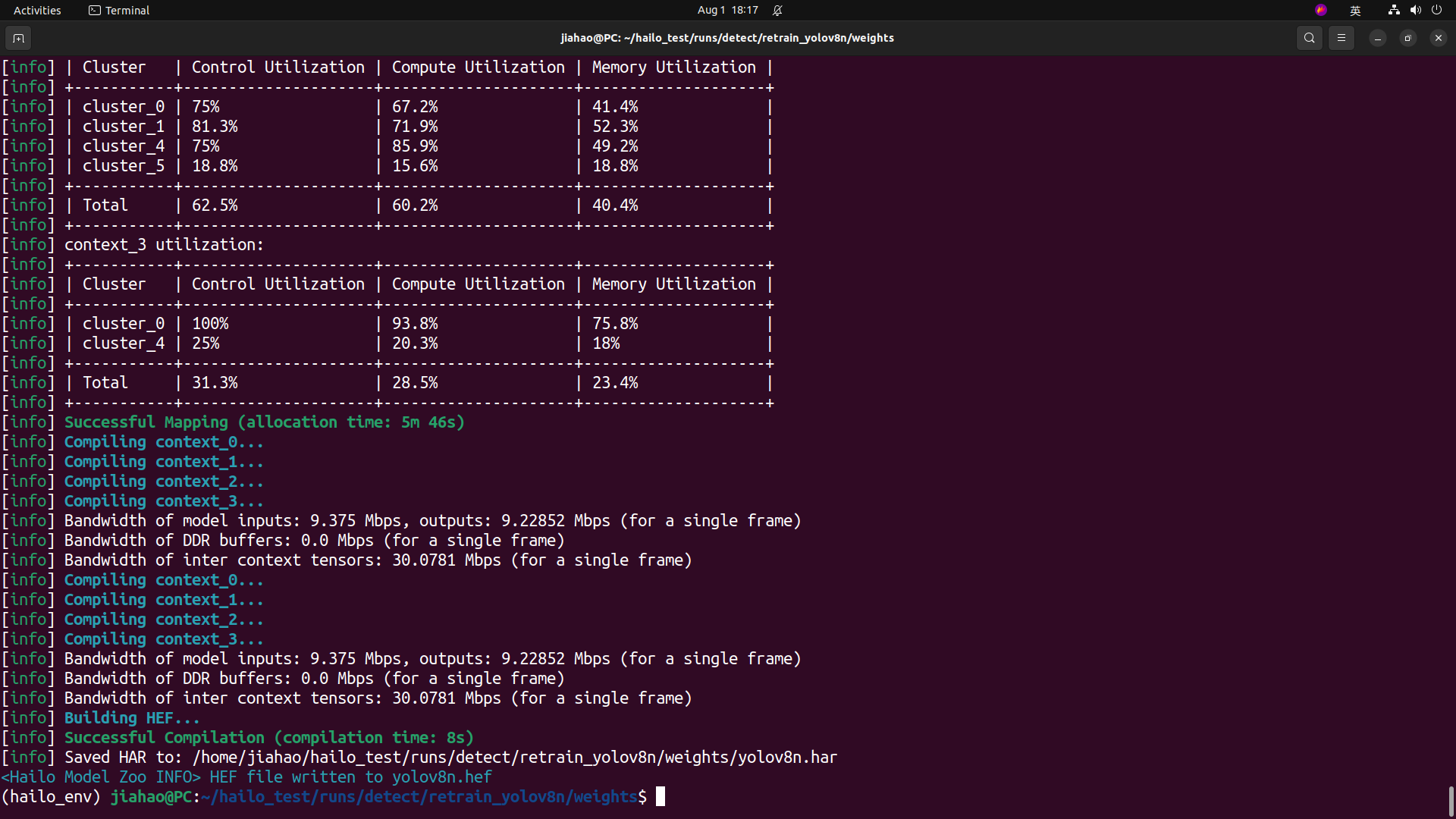
すべて完了するとhefモデルが得られ、これをAIキット付きのraspberry pi5にデプロイできます
ls

Raspberry Pi5上で
システムの更新
sudo apt update
sudo apt full-upgrade
PCIe を gen2/gen3 に設定(gen3 は gen2 より高速)
/boot/firmware/config.txt に以下のテキストを追加します
#Enable the PCIe external connector
dtparam=pciex1
#Force Gen 3.0 speeds
dtparam=pciex1_gen=3
gen2 を使用したい場合は、dtparam=pciex1_gen=3 をコメントアウトしてください
hailo-all をインストールして再起動
Raspberry Pi 5 でターミナルを開き、以下のコマンドを入力して Hailo ソフトウェアをインストールします
sudo apt install hailo-all
sudo reboot
ソフトウェアとハードウェアの確認
Raspberry Pi5 でターミナルを開き、以下のコマンドを入力して hailo-all がインストールされているかを確認します。
hailortcli fw-control identify
正しい結果は以下のように表示されます:

Raspberry Pi5 でターミナルを開き、以下のコマンドを入力して hailo-8L が接続されているかを確認します。
lspci | grep Hailo
正しい結果は以下のように表示されます:

プロジェクトのクローン
git clone https://github.com/Seeed-Projects/Benchmarking-YOLOv8-on-Raspberry-PI-reComputer-r1000-and-AIkit-Hailo-8L.git
cd Benchmarking-YOLOv8-on-Raspberry-PI-reComputer-r1000-and-AIkit-Hailo-8L
モデルを Raspberry Pi5 にコピー
hailomodel という名前のディレクトリを作成します
mkdir hailomodel
以下のコマンドは Raspberry Pi 5 ではなく、ホストコンピュータで実行する必要があります。ホストコンピュータと Raspberry Pi 5 の両方が同じネットワークに接続されていることを確認してください。
scp -r ./yolomodel/runs/detect/retrain_yolov8n/weights/yolov8n.hef username@ip /home/pi/Benchmarking-YOLOv8-on-Raspberry-PI-reComputer-r1000-and-AIkit-Hailo-8L/hailomodel/
コードの変更
object-detection-hailo.py の 105 行目と 106 行目を見つけて、以下のようにコードを変更します:
elif args.network == "yolov8n":
self.hef_path = os.path.join(self.current_path, './hailomodel/yolov8n.hef')
object-detection-hailo.py の 172 行目を見つけて、以下のようにコードを変更します:
parser.add_argument("--network", default="yolov8n", choices=['yolov6n', 'yolov8s', 'yolox_s_leaky'], help="Which Network to use, defult is yolov6n")
コードの実行
bash run.sh object-detection-hailo
結果
こちらは YOLOv8n モデルをトレーニングして Raspberry Pi 5 にデプロイするプロセスを実演した動画です。バッチサイズを 8、入力サイズを 640x640、入力動画フレームレートを 240 fps に設定しました。達成された推論速度は 136.7 fps で、ほとんどのアプリケーションシナリオにとって非常に高速です。
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。