reComputer上のViseron
はじめに
Viseronは、Pythonで実装されたセルフホスト型のローカル専用NVRおよびAIコンピュータビジョンソフトウェアです。Viseronの目標は、強力で柔軟性を保ちながら、セットアップと使用を簡単にすることです。外部依存関係やクラウドサービスを必要とせず、ローカルネットワーク上で動作するように設計されています。
前提条件
ハードウェア要件
| reComputer AI R2130 | reComputer AI Industrial R2145 |
|---|---|
 |  |
ソフトウェア要件
システムの更新
以下のコマンドを使用して実行してください。
sudo apt update
sudo apt upgrade -y
dockerとdocker composeのダウンロード
以下のコマンドを使用してdockerをインストールしてください。
wget https://get.docker.com -O get-docker.sh
chmod +x
sudo sh get-docker.sh
sudo systemctl start docker
sudo systemctl enable docker
docker --version
結果は以下のように表示されます:

以下のコマンドを使用してdocker composeをインストールしてください。
sudo curl -L "https://github.com/docker/compose/releases/download/$(curl -s https://api.github.com/repos/docker/compose/releases/latest | jq -r .tag_name)/docker-compose-$(uname -s)-$(uname -m)" -o /usr/local/bin/docker-compose
sudo chmod +x /usr/local/bin/docker-compose
docker-compose --version
結果は以下のように表示されます:

Viseronのダウンロード
フォルダの作成
以下のコマンドを使用してフォルダを作成してください
cd ~
mkdir -p viseron_data/{timelapse,thumbnails,snapshots,segments,models,event_clips,config}
モデルのダウンロード
以下のコマンドを使用してhailo8デバイス用のhefモデルをダウンロードしてください。
cd ~/viseron_data/models
wget https://hailo-model-zoo.s3.eu-west-2.amazonaws.com/ModelZoo/Compiled/v2.16.0/hailo8/yolov8n.hef
docker-compose.yamlの作成
以下のコマンドを使用してdocker-compose.yamlを作成してください。
cd ~ && nano docker-compose.yaml
services:
viseron:
image: roflcoopter/viseron:latest
container_name: viseron
shm_size: "1024mb"
volumes:
- /home/ain/viseron_data/segments:/segments
- /home/ain/viseron_data/snapshots:/snapshots
- /home/ain/viseron_data/thumbnails:/thumbnails
- /home/ain/viseron_data/event_clips:/event_clips
- /home/ain/viseron_data/timelapse:/timelapse
- /home/ain/viseron_data/config:/config
- /etc/localtime:/etc/localtime:ro
- /home/ain/viseron_data/models:/models
ports:
- 8888:8888
devices:
- /dev/hailo0
Viseronの設定
Viseronの実行
以下のコマンドを使用してviseronを実行してください
cd ~
docker compose up
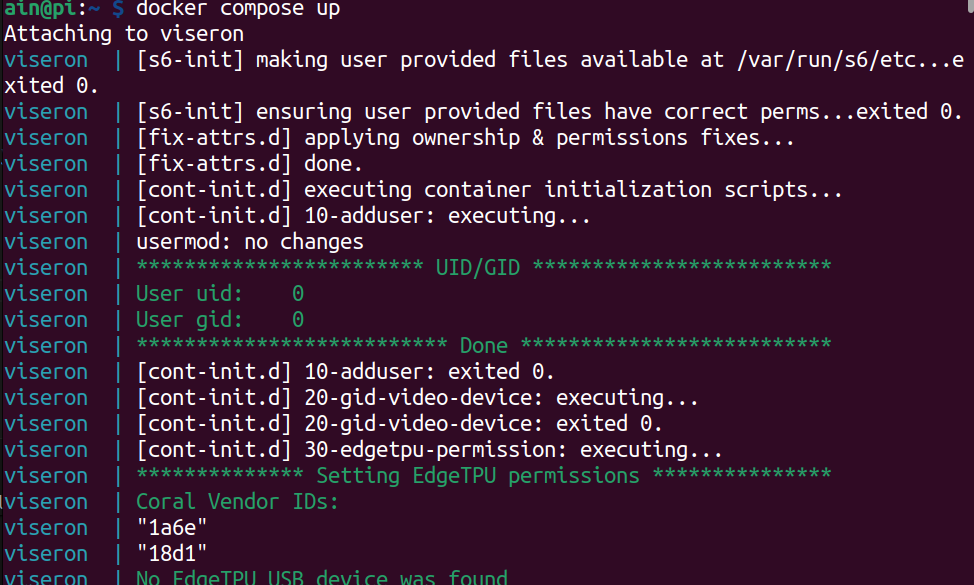
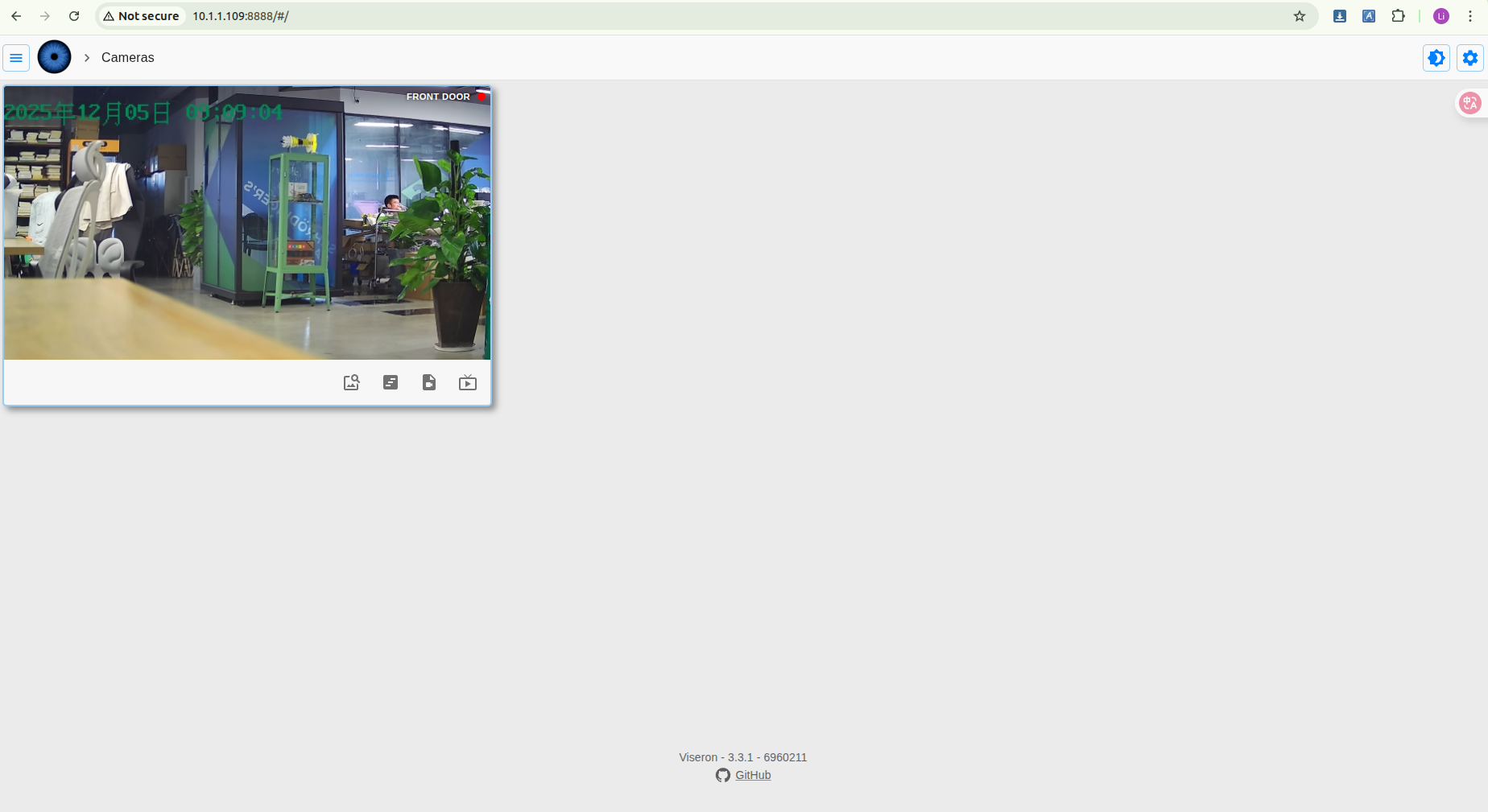
ポートを開く
ポート8888を開いてください。以下のような結果が表示されます:
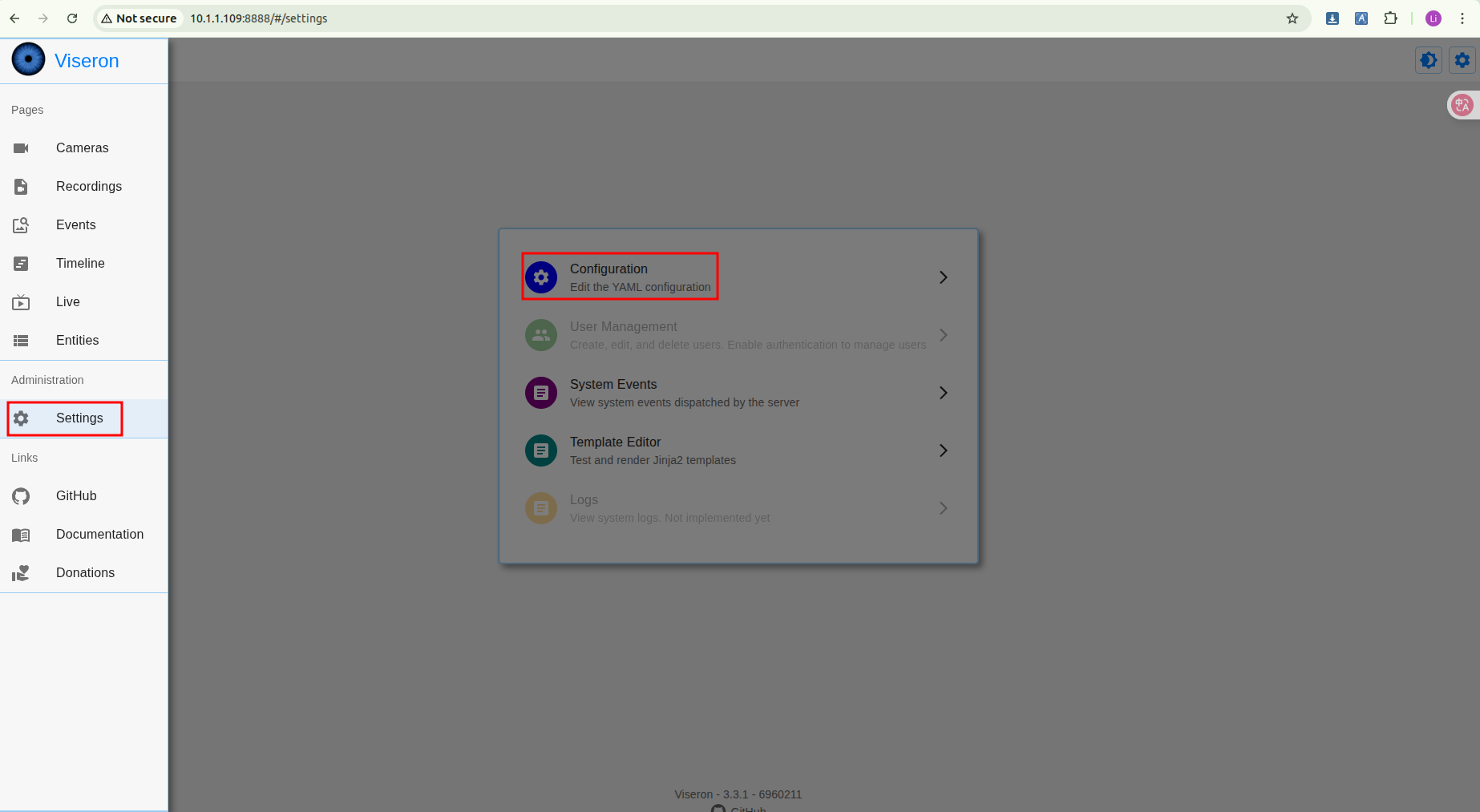
設定
以下の手順に従ってViseronを設定し、カメラのアドレスに応じて設定情報を置き換えてください。
# Viseron Configuration Example - Resolving Hailo component and camera identifier mismatch
# Core concept: All components use the same camera identifier "cam_front"
# 1. Camera Configuration (FFmpeg Component)
# This is the foundation for all detection features. Ensure the identifier here is correctly referenced by other components.
ffmpeg:
camera:
cam_front: # 🔑 Key identifier: other components must reference this name
name: "Front Door" # Camera display name (customizable)
host: 10.1.1.200 # IP address of the camera
port: 554 # RTSP port (usually 554)
path: /cam/realmonitor?channel=1&subtype=1 # RTSP stream path (replace with your camera's actual path)
username: admin
password: passw0rd
fps: 6 # Set the video stream frame rate
recorder:
idle_timeout: 1 # Idle timeout setting
codec: h264 # Recording codec
# 2. Hailo Object Detector Configuration
# This component uses Hailo-8 AI acceleration hardware for object detection and must point to a configured camera.
hailo:
object_detector:
model_path: /models/yolov8n.hef # 🔑 Important: Replace with the path to your HEF model file
# Add the following line based on your Hailo hardware version (e.g., hailo8 or hailo8l)
# hailo_arch: hailo8
cameras:
cam_front: # ⬅️ Must exactly match the identifier defined in the ffmpeg section above
fps: 2 # Detection frame rate (higher consumes more resources)
scan_on_motion_only: false # Set to true to perform AI detection only when motion is detected
labels:
- label: person # Detect the "person" class
confidence: 0.7 # Confidence threshold
trigger_event_recording: true # Trigger event recording when detected
- label: car # You can add other classes to detect
confidence: 0.7
# 3. Motion Detector Configuration (MOG2 Component)
# Can provide pre-triggering for Hailo AI detection to save computational resources.
mog2:
motion_detector:
cameras:
cam_front: # ⬅️ Use the same consistent identifier
fps: 2 # Motion detection frame rate
# 4. NVR (Network Video Recorder) Configuration
# Binds all the above components together and manages recording.
nvr:
cam_front: # ⬅️ Use the same consistent identifier
motion_detector: # Enable motion detection
enabled: true
object_detector: # Enable object detection
enabled: true
interval: 0.5 # Object detection trigger interval
# (Optional) Logger level adjustment, can be set to 'debug' for troubleshooting
logger:
default_level: info
実行
以下の手順に従ってソフトウェアを実行してください。
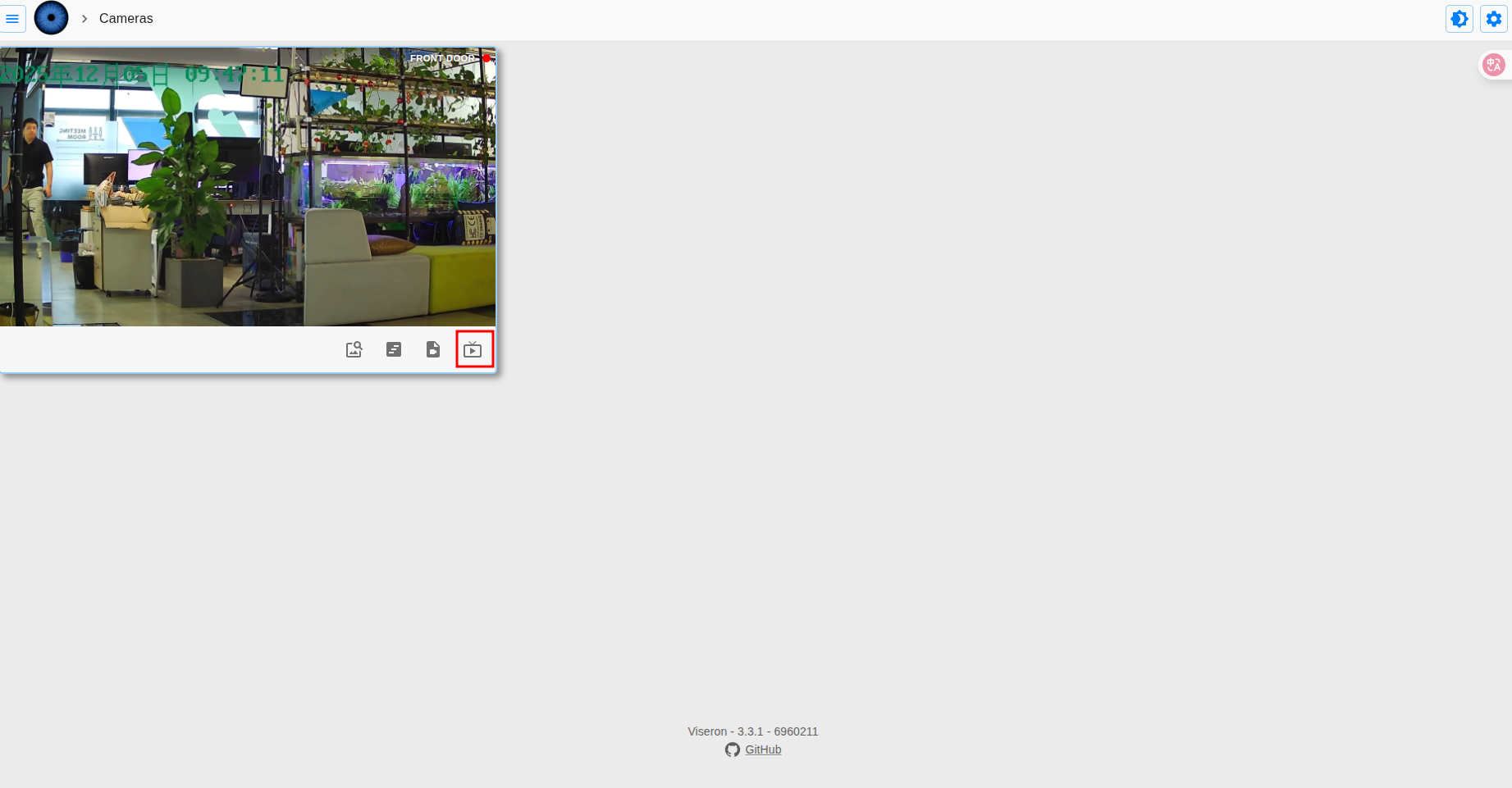
結果
すべてを設定したら、現在のカメラからのライブフィードを表示できます。fpsを2に設定したため、動画が少しカクカクして見える場合があります。
技術サポートと製品ディスカッション
当社の製品をお選びいただき、ありがとうございます!当社の製品での体験ができるだけスムーズになるよう、さまざまなサポートを提供しています。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。