Watcherソフトウェアアーキテクチャ
SenseCAP Watcherのソフトウェアアーキテクチャは下図に示すように、主に3つの部分に分かれています:APPアプリケーション、UIとインタラクション、タスクフロー。

- APPアプリケーション:主にWiFi接続、Bluetooth設定、プラットフォームとの通信、OTAなどのアプリケーションで、UI表示用のデータも生成します。
- UIとインタラクション:主にUIインターフェースとUIインタラクションの実装。
- タスクフロー:主にタスクフローエンジンと各種タスクフロー機能モジュールの実装。
1. タスクフローフレームワーク
1.1 概要
様々なシナリオのニーズに対応するため、Node-REDに似たタスクフローフレームワークを設計しました。これにより、デバイスが持つスキルを柔軟に組織化し、連携させることができます。
デバイスが持つスキルをブロックとして抽象化し、これらはデータプロデューサーやコンシューマー、またはその両方になることができます。そして、特定のタスクに応じて、必要なブロックを抽出し、プロデューサー-コンシューマー関係を通じて接続することで、特定のシナリオタスクを実現します。
1.2 タスクフローエンジン
タスクフローエンジンの主な機能は、各種機能モジュールがタスクフローJSONに従って動作できるようにすることです。機能モジュールの登録、インスタンス化、破棄、およびそれらの間の接続を管理します。
タスクフローエンジンの処理フローは以下の通りです:

- タスクフローエンジンを初期化します。
- 各機能モジュールをタスクフローエンジンに登録し、連結リストを使用して各モジュールの管理機能と情報を格納します。
- タスクフローエンジンはタスクフローの受信を待機します。
- 新しいタスクフローを受信すると、タスクフローJSONを解析し、必要な機能モジュールを抽出して配列に格納します。
- 機能モジュール配列で、モジュール名に基づいて連結リストからモジュールの管理機能を見つけ、ソートします。
- 機能モジュールをインスタンス化します。
- 機能モジュールを設定します。
- 機能モジュール間でメッセージ伝送用のイベントパイプラインを確立します。
- 各機能モジュールを順次開始します。
- 開始されると、タスクフローが実行されます。
1.3 タスクフローJSON
タスクフローはJSON形式で記述され、タスクフローエンジンはこのJSONファイルを解析してタスクフローを実行します。
以下はタスクフローJSONテンプレートです:
{
"tlid": 123456789,
"ctd": 123456789,
"tn": "Task flow template",
"type": 0,
"task_flow": [
{
"id": 1,
"type": "module1",
"index": 0,
"version": "1.0.0",
"params": {
},
"wires": [
[
2
]
]
},
{
"id": 2,
"type": "module2",
"index": 1,
"version": "1.0.0",
"params": {
},
"wires": [
[
3,
4
]
]
},
{
"id": 3,
"type": "module3",
"index": 2,
"version": "1.0.0",
"params": {
},
"wires": []
},
{
"id": 4,
"type": "module4",
"index": 3,
"version": "1.0.0",
"params": {
},
"wires": []
}
]
}
フィールドの説明:
- ctd: タスクフローの作成時間。
- tlid: タスクフローID。ctdと同じにすることができます。
- tn: タスクフローの名前。
- type: タスクフローのタイプ
- 0: ローカルサンプルタスクフロー。
- 1: MQTT経由で発行されたタスクフロー。
- 2: Bluetooth経由で発行されたタスクフロー。
- 3: 音声経由で発行されたタスクフロー。
- task_flow: タスクフロー内の各機能モジュールの詳細情報を含みます。
- id: モジュールID。
- type: モジュール名。
- index: タスクフロー内のモジュールの順序。フロー内の位置が早いほど値が小さく、モジュールのソートに使用されます。
- version: モジュールバージョン。
- params: モジュールパラメータ。異なるバージョンでは異なるパラメータ設定を持つ場合があり、バージョン番号に応じて互換性を保って解析できます。
- wires: モジュール間の接続。詳細はタスクフロー機能モジュールのイベントパイプラインを参照してください。
以下は火災監視のタスクフローJSONの例です。
{
"tlid": 1720171506807,
"ctd": 1720171527631,
"tn": "App notifies about fire emergency",
"task_flow": [
{
"id": 86464178,
"type": "ai camera",
"type_id": 0,
"index": 0,
"vision": "0.0.1",
"params": {
"model_type": 0,
"model": {},
"modes": 1,
"conditions": [],
"conditions_combo": 0,
"silent_period": {
"time_period": {
"repeat": [
1,
1,
1,
1,
1,
1,
1
],
"time_start": "00:00:00",
"time_end": "23:59:59"
},
"silence_duration": 60
},
"output_type": 1,
"shutter": 0
},
"wires": [
[
540820974
]
]
},
{
"id": 540820974,
"type": "image analyzer",
"type_id": 3,
"index": 1,
"version": "0.0.1",
"params": {
"url": "",
"header": "",
"body": {
"prompt": "Is there a fire?",
"type": 1,
"audio_txt": "Fire alert"
}
},
"wires": [
[
1516408094,
1981533581
]
]
},
{
"id": 1981533581,
"type_id": 99,
"type": "sensecraft alarm",
"index": 2,
"version": "0.0.1",
"params": {
"silence_duration": 10,
"text": "Fire alert"
},
"wires": []
},
{
"id": 1516408094,
"type_id": 5,
"type": "local alarm",
"index": 3,
"version": "0.0.1",
"params": {
"sound": 1,
"rgb": 1,
"img": 1,
"text": 1,
"duration": 10
},
"wires": []
}
],
"type": 0
}
このタスクフローは、AIカメラ、画像アナライザー、ローカルアラーム、SenseCraftアラームの4つのブロックを使用します。配線トポロジーは以下の通りです:

以下の図は、タスクフローエンジンの一般的なフローと機能モジュールの起動を示しています:
1.4 モジュールのイベントパイプライン
機能モジュール間の接続はデータ伝送を表し、前のモジュールがデータを生成して次のモジュールに送信します。メッセージ伝送はイベントメカニズムを使用し、前者がイベントを発行し、後者がイベントを購読します。イベントはIDFのesp_eventコンポーネントを使用して実装され、キューキャッシュをサポートします。
各モジュールには一意のidがあり、これはモジュールが購読するイベントidとして機能します。sub_set実行中、モジュールはそのidを持つメッセージを購読し、停止実行中はそのイベントidの登録を解除します。一部のモジュールは励起源として、上流モジュールを持たず、そのイベントIDを購読せずに動作できます。
各モジュールにはwiresフィールドがあり、次のモジュールのidを示します。pub_set実行時、これらのidがキャッシュされ、データが利用可能になったときにこれらのidにデータが発行されます。一部のモジュールはwiresフィールドが空で、下流モジュールがないことを示し、データを生成せずに消費します。
各モジュールは最大1つの入力端子を持てますが、複数の出力端子を持つことができ、異なるデータ出力を示し、各出力端子は複数のブロックに出力できます。wiresフィールドは2次元配列で、第1層は出力端子の数を表し、第2層は端子が出力するモジュールのidを表します。
以下の例に示すように、モジュール1はイベントID 2でメッセージを発行し、モジュール2がメッセージを受信して処理します。モジュール2は2つの出力端子を持ち、第1出力端子はモジュール3と4に接続し、第2出力端子はモジュール5に接続します。出力端子1にデータがある場合、イベントID 3と4にメッセージを発行し、出力端子2にデータがある場合、イベントID 5にメッセージを発行します。

モジュール2に対応するJSON記述は以下の通りです:
{
"id": 2,
"type": "module name",
"index": 1,
"version": "1.0.0",
"params": {
},
"wires": [
[
3,
4
],
[
5
]
]
}
関連する操作関数は tf.h で定義されており(主にidfの esp_event 関連関数をカプセル化)、以下の通りです:
esp_err_t tf_event_post(int32_t event_id,
const void *event_data,
size_t event_data_size,
TickType_t ticks_to_wait);
esp_err_t tf_event_handler_register(int32_t event_id,
esp_event_handler_t event_handler,
void *event_handler_arg);
esp_err_t tf_event_handler_unregister(int32_t event_id,
esp_event_handler_t event_handler);
1.4.1 イベントパイプラインで送信されるメッセージタイプ
2つのモジュールを接続できることは、それらのデータタイプが一致していることを示します。データタイプと対応するデータ構造をtf_module_data_type.hファイルで定義しています。一般的に、データタイプはTF_DATA_TYPE_プレフィックスで定義され、データ構造はtf_data_プレフィックスで定義されます。
例えば、タイプ列挙構造でTF_DATA_TYPE_BUFFERタイプを定義し、対応する構造は以下の通りです。最初のフィールドtypeはデータタイプを示し、残りのフィールドは送信されるデータを示します。
typedef struct {
uint8_t type;
struct tf_data_buf data;
} tf_data_buffer_t;
モジュールがイベントデータを受信すると、まずイベントデータの最初のバイトを抽出してデータタイプを取得し、そのデータが必要なものかどうかを判断します。必要な場合はさらに処理を行い、そうでなければ破棄します。
現在利用可能なデータタイプは以下の通りです:
| データタイプ | データ構造 | 説明 |
|---|---|---|
| TF_DATA_TYPE_TIME | tf_data_time_t | タイムスタンプ |
| TF_DATA_TYPE_BUFFER | tf_data_buffer_t | バッファ |
| TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE | tf_data_dualimage_with_inference_t | 大きな画像、小さな画像、推論情報を含む |
| TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | tf_data_dualimage_with_audio_text_t | 大きな画像、小さな画像、アラーム音声、アラームテキストを含む |
-
大きな画像:himaxから取得した640 x 480のjpeg形式の画像で、base64エンコーディングを使用して保存されます。
-
小さな画像:himaxから取得した416 x 416のjpeg形式の画像で、base64エンコーディングを使用して保存されます。
-
推論情報:himaxから取得した推論結果で、ボックス座標の配列、クラス分類情報、またはポイント座標情報、およびクラス名情報が含まれます。
-
オーディオ:トリガーブロックから取得したデータで、.mp3形式です。
1.4.2 イベントパイプラインでの効率的な伝送
idfのesp_eventコンポーネントを使用してメッセージ伝送を行う場合、エンキュー時にメモリコピーが発生します(詳細についてはesp_eventのソースコードをお読みください)。これは画像やオーディオなどの大きなデータを伝送する際には非常に不適切です。
そのため、ポインタのみを伝送する効率的な伝送方法を採用しています。例えば、TF_DATA_TYPE_BUFFERタイプでは、伝送するデータは以下のように定義されます。最初のフィールドp_bufはデータバッファの開始アドレスで、2番目のフィールドlenはデータの長さです。
struct tf_data_buf
{
uint8_t *p_buf;
uint32_t len;
};
データプロデューサーモジュールでは、p_bufのメモリ割り当てを担当します。次のレベルのデータコンシューマーモジュールは、使用後にメモリを解放する責任があります。
一般的なデータコピーと解放関数は、tf_module_util.hファイルで定義されています。例えば、受信したイベントデータタイプが望むものでない場合、**tf_data_free()**関数を直接呼び出してメモリを解放できます(この関数はすべてのデータタイプの解放を実装しています)。以下に示します:
static void __event_handler(void *handler_args, esp_event_base_t base, int32_t id, void *p_event_data)
{
uint32_t type = ((uint32_t *)p_event_data)[0];
if( type != TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE ) {
ESP_LOGW(TAG, "Unsupport type %d", type);
tf_data_free(p_event_data);
return;
}
//...
}
1.5 モジュールのベースクラス
モジュールのベースクラスを tf_module.h で定義しています。タスクフローエンジンはモデルの具体的な実装には関与せず、モジュールの関連インターフェースを呼び出してそれらを操作するだけです。各具体的なモジュールは、操作関数と管理関数を実装するだけで済みます。
struct tf_module_ops
{
int (*start)(void *p_module);
int (*stop)(void *p_module);
int (*cfg)(void *p_module, cJSON *p_json);
int (*msgs_sub_set)(void *p_module, int evt_id);
int (*msgs_pub_set)(void *p_module, int output_index, int *p_evt_id, int num);
};
typedef struct tf_module_mgmt {
tf_module_t *(*tf_module_instance)(void);
void (*tf_module_destroy)(tf_module_t *p_module);
}tf_module_mgmt_t;
モジュールの書き方については、Watcher Function Module Development Guideを参照してください。
2. 機能モジュール
2.1 リスト
現在、一般的な組み込みモジュールには、ai camera、alarm trigger、image analyzer、local alarm、sensecraft alarm、uart alarmが含まれています。
| カテゴリ | 機能モジュール | 入力データタイプ | 出力データタイプ | 複数インスタンス対応 |
|---|---|---|---|---|
| 励起ソース | ai camera | 任意のデータタイプ | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE | N |
| timer | - | TF_DATA_TYPE_TIME | Y | |
| トリガーモジュール | alarm trigger | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | Y |
| image analyzer | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | Y | |
| アラームモジュール | local alarm | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | - | N |
| sensecraft alarm | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | - | Y | |
| uart alarm | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | - | Y |
2.2 機能モジュール紹介
2.2.1 timer
timerブロックは励起ソースモジュールで、主に周期タイマーとして機能します。パラメータ定義は以下の通りです:
{
"type": "timer",
"version": "1.0.0",
"params": {
"period": 5
}
}
設定パラメータは以下の通りです:
- params: デバイスパラメータを含むオブジェクト。
- period: タイマーを開始するための周期。
ターミナル接続の説明:
| ターミナル | データタイプ | 説明 |
|---|---|---|
| 入力 | - | - |
| 出力 | TF_DATA_TYPE_TIME | 現在のタイムスタンプを出力 |
2.2.2 ai camera
ai cameraブロックは主にHimaxとの通信、モデルOTA、画像と推論結果の取得を担当し、いくつかの簡単な条件フィルタリング機能を含んでいます。パラメータ定義は以下の通りです:
{
"type": "ai camera",
"version": "1.0.0",
"params": {
"model_type": 0,
"model": {
"model_id": "60021",
"version": "1.0.0",
"arguments": {
"size": 8199.37,
"url": "https://sensecraft-statics.oss-accelerate.xxx",
"icon": "https://sensecraft-statics.oss-accelerate.xxx.png",
"task": "detect",
"createdAt": "1695282154",
"updatedAt": "17149mode60582",
"iou": 50,
"conf": 50
},
"model_name": "General Object Detection",
"model_format": "TensorRT",
"ai_framework": "2",
"author": "SenseCraft AI",
"algorithm": "Object Detect(TensorRT, SMALL, COCO)",
"classes": [
"person"
],
"checksum": ""
},
"modes": 1,
"conditions": [{
"class": "person",
"mode": 1,
"type": 1,
"num": 1
}],
"conditions_combo": 0,
"silent_period": {
"time_period": {
"repeat": [1, 1, 1, 1, 1, 1, 1],
"time_start": "08:59:59",
"time_end": "00:00:00"
},
"silence_duration": 60
},
"output_type": 1,
"shutter": 0
}
}
paramsパラメータの各フィールドの意味は以下の通りです:
- model_type: モデルタイプ、0はクラウドモデル(modelフィールドからモデルURLを抽出してダウンロード・使用)、1、2、3はHimax内蔵モデルを示します。
- model: モデルの具体的な情報。
- model_id: モデルの一意識別子。
- version: モデルバージョン。
- arguments: モデルパラメータ設定。
- size: モデルのサイズ。
- url: モデルのダウンロードURL。
- icon: モデルのアイコンURL。
- task: モデルのタスクタイプ、"detect"は検出を示します。
- createdAt: モデル作成のタイムスタンプ。
- updatedAt: モデル更新のタイムスタンプ。
- iou: IOU(Intersection over Union)閾値。
- conf: 信頼度閾値。
- model_name: モデル名、"General Object Detection"。
- model_format: モデル形式、"TensorRT"。
- ai_framework: 使用されるAIフレームワーク。
- author: モデルの作成者、"SenseCraft AI"。
- algorithm: アルゴリズムの説明、"Object Detect(TensorRT, SMALL, COCO)"。
- classes: モデルが検出できるカテゴリ、"person"を含みます。
- checksum: モデルファイルのチェックサム(MD5)、現在は空です。
- modes: 動作モード、0は推論モード、1はサンプリングモードを示します;1の場合、デバイスはmodelフィールドを解析しません。
- conditions: 検出条件のリスト。
- class: 検出するカテゴリ、ここでは"person"。
- mode: 検出モード、0は存在検出、1は数値比較、2は数量変化を示します。
- type: 比較タイプ、0は未満、1は等しい、2は超過、3は等しくない(mode=1の場合のみ有効)。
- num: 比較値(mode=1の場合のみ有効)。
- conditions_combo: 複数条件検出の関係、0はAND、1はORを示します。
- silent_period: サイレント期間設定。
- time_period: 時間期間設定。
- repeat: 日曜日から土曜日までの繰り返し時間期間、1は有効を示します。
- time_start: サイレント期間の開始時刻。
- time_end: サイレント期間の終了時刻。
- silence_duration: サイレンス継続時間、秒単位。
- time_period: 時間期間設定。
- output_type: 出力画像タイプ、0は小画像のみ(412x412)、1は大画像と小画像の両方(640x480; 412x412)。
- shutter: シャッターモード、0は連続開放、1はUIによるトリガー、2は入力イベントによるトリガー、3は1回シャッター。
端子接続説明:
| 端子 | データタイプ | 説明 |
|---|---|---|
| Input | 任意のデータタイプ | 入力はシャッターをトリガーできます |
| Output | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE | 大画像、小画像、推論情報を出力します(このフィールドは推論モデルの場合のみ有効) |
2.2.3 alarm trigger
alarm triggerブロックはai cameraの次のブロックになる可能性があり、主に次のalarmブロックに提供するためのオーディオとテキストを追加します。パラメータ定義は以下の通りです:
{
"type": "alarm trigger",
"version": "1.0.0",
"params": {
"text": "",
"audio": ""
}
}
設定パラメータは以下の通りです:
- params: デバイスパラメータを含むオブジェクト。
- text: オーディオテキスト、オーディオコンテンツの生成に使用される情報。
- audio: MP3形式のオーディオコンテンツを表すBase64エンコードされたオーディオファイル。
ターミナル接続の説明:
| ターミナル | データタイプ | 説明 |
|---|---|---|
| Input | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE | AIカメラブロックからのデータ出力 |
| Output | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | 大画像、小画像、推論情報、アラームmp3オーディオ、およびテキストを出力 |
2.2.4 image analyzer
image analyzerブロックは、AIカメラの次レベルブロックである可能性があり、主にLLMを呼び出して画像を分析します。分析のリクエストがアラームをトリガーする結果を返すと、次レベルモジュールにデータを出力します。パラメータは以下のように定義されます:
{
"type": "image analyzer",
"version": "1.0.0",
"params": {
"url": "",
"header": "",
"body": {
"prompt": "",
"type": 0,
"audio_txt": ""
}
}
}
設定パラメータは以下の通りです:
- params: デバイスパラメータを含むオブジェクト。
- url: リクエスト用のURLアドレス、予約済み(通常はデバイスで設定されたURLを使用)。
- header: リクエストヘッダー、予約済み。
- body: リクエストボディの内容を含むオブジェクト。
- prompt: リクエストに含めるプロンプト、画像解析のための追加情報を提供。
- type: リクエストのタイプ、1は監視を示す。
- audio_txt: リクエストに含める音声テキスト情報。監視シーンがトリガーされると、インターフェースサービスはこのフィールドをTTSに変換し、インターフェースで返す。
端子接続の説明:
| 端子 | データタイプ | 説明 |
|---|---|---|
| Input | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE | AIカメラブロックからのデータ出力 |
| Output | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | 大画像、小画像、推論情報、アラームmp3音声、およびテキストを出力 |
2.2.5 local alarm
ローカルアラームブロックはアラームブロックで、主にデバイスアラームを実装し、トリガー時にRGBの点滅制御、アラーム音声の再生、LCDでのアラームテキスト表示、アラーム画像の表示などを行います。パラメータは以下のように定義されます:
{
"type": "local alarm",
"version": "1.0.0",
"params": {
"sound": 1,
"rgb": 1,
"img": 1,
"text": 1,
"duration": 10
}
}
設定パラメータは以下の通りです:
- params: デバイスパラメータを含むオブジェクト。
- sound: オーディオを再生するスイッチ、1はオン、0はオフを意味します。
- rgb: RGBアラームライトのスイッチ、1はオン、0はオフを意味します。
- img: アラーム画像を表示するスイッチ、1はオン、0はオフを意味します。
- text: アラームテキストを表示するスイッチ、1はオン、0はオフを意味します。
- duration: アラームの継続時間(秒)、ここでは10秒です。
ターミナル接続の説明:
| ターミナル | データタイプ | 説明 |
|---|---|---|
| 入力 | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | 前のトリガーブロックからのデータ出力 |
| 出力 | - | - |
2.2.6 sensecraft alarm
sensecraft alarmブロックはアラームブロックで、主にSenseCraftプラットフォームにアラーム情報を通知します。パラメータは以下のように定義されています:
{
"type": "sensecraft alarm",
"version": "1.0.0",
"params": {
"silence_duration": 60,
"text": ""
}
}
設定パラメータは以下の通りです:
- params: デバイスパラメータを含むオブジェクト。
- silence_duration: 無音継続時間(秒)、ここでは60秒で、最小レポート間隔が60秒であることを示します。
- text: プラットフォームアラーム通知のテキスト。
端子接続の説明:
| 端子 | データタイプ | 説明 |
|---|---|---|
| Input | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | 前のトリガーブロックからのデータ出力 |
| Output | - | - |
2.2.7 uart alarm
uart alarmブロックはアラームブロックで、主にシリアルポートを通じてアラーム情報出力を実装します。パラメータは以下のように定義されます:
{
"id": "<random number>",
"type": "uart alarm",
"version": "1.0.0",
"params": {
"output_format": 0,
"text": "a string that you want to pass to the consumer of the uart packet.",
"include_big_image": 0,
"include_small_image": 0
}
}
設定パラメータは以下の通りです:
- params: デバイスパラメータを含むオブジェクト。
- output_format: 出力フォーマット。
- 0: バイナリフォーマット。
- 1: JSONフォーマット。
- text: アラームテキスト、このテキストはシリアル出力パケットのPromptフィールドに入力されます。このパラメータが設定されていない場合、現在のタスクフローの短縮名が入力されます。
- include_big_image: 大きな画像を含むかどうか。
- 0: いいえ。
- 1: はい。
- include_small_image: 小さな画像を含むかどうか。
- 0: いいえ。
- 1: はい。
- output_format: 出力フォーマット。
ターミナル接続の説明:
| ターミナル | データタイプ | 説明 |
|---|---|---|
| 入力 | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | 前のトリガーブロックからのデータ出力 |
| 出力 | - | - |

uart アラームは、SenseCAP Watcher の背面にあるシリアルポートからデータパケットを出力します。配線方法は上図に示されています。シリアルポートのパラメータは以下の通りです:
- ボーレート:115200
- 8ビット、1ストップビット
- パリティチェックなし
注意:ESP32S3 ピン IO_19 と IO_20 の電源投入時のデフォルト動作により、このシリアルポートは SenseCAP Watcher の初回電源投入時にいくつかのランダムバイトを出力します。フィルタリングには有効なデータパケット検出メカニズムを使用してください。
シリアルポートから出力されるデータパケットの形式は、output_format パラメータに応じて2つの形式に分かれます:
A. バイナリ形式
バイナリデータパケット形式は以下の通りです:
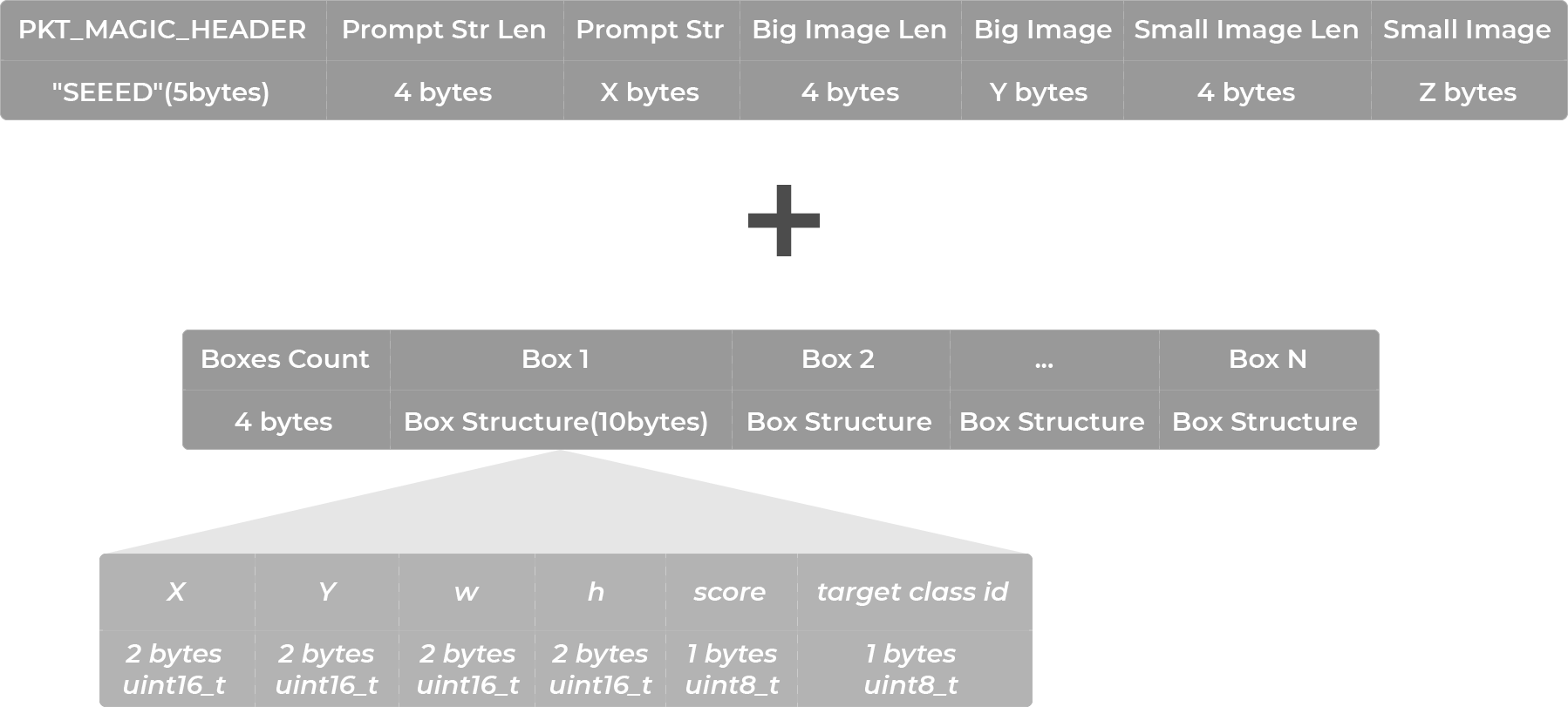
フィールド:
- Packet Magic Header - パケットヘッダー、5バイト "SEEED"
- Prompt Str Len - プロンプト文字列長
- Prompt Str - プロンプト文字列またはアラームテキスト。
textパラメータが設定されている場合、それはtextパラメータのコピーです。textパラメータが設定されていない場合、タスクの目的を説明する短いテキストが自動的に入力されます(クラウドサービスのタスクコンパイルインターフェースによって生成)。 - Big Image Len - 大きな画像のbase64エンコード文字列のバイト長、
include_big_image=0の場合、値は0です。 - Big Image - 大きな画像JPGのBase64エンコード文字列
- Small Image Len - 小さな画像のbase64エンコード文字列のバイト長、
include_small_image=0の場合、値は0です。 - Small Image - 小さな画像JPGのBase64エンコード文字列
- Inference type - 推論結果タイプ;0:推論情報なしを示す、1:出力がボックス推論であることを示す、2:出力がクラス推論結果であることを示す
- Boxes/classes - 推論結果。
- Classes name - クラス名。
上記のフィールドのうち、Packet Magic Header、Prompt Str Len、Prompt Str フィールドは必須出力フィールドです。その他のフィールドはパラメータの有効化によって制御されます。例えば、パラメータ include_big_image: 1 が設定されている場合、バイナリデータパケットは Big Image Len と Big Image フィールドを追加します。
B. JSON形式
JSONデータパケット形式は以下の通りです:
#in the stream of uart output
.....{packet object}\r\n{packet object}\r\n...
パケットオブジェクト:
{
"prompt": "monitor a cat",
"big_image": "base64 encoded JPG image, if include_big_image is enabled, otherwise this field is omitted",
"small_image": "base64 encoded JPG image, if include_small_image is enabled, otherwise this field is omitted",
"inference":{
"boxes": [
[145, 326, 240, 208, 50, 0]
],
"classes": [
[50, 0]
],
"classes_name": [
"person"
]
}
}
同様に、「prompt」フィールドは必須の出力フィールドです。「big_image」と「small_image」フィールドはパラメータによって制御されます。
2.2.7 http alarm
http alarmブロックはアラームブロックで、主にアラーム情報をHTTPサーバーに転送する機能を実装します。パラメータ定義は以下の通りです:
{
"id":"",
"type": "http alarm",
"version": "1.0.0",
"params": {
"silence_duration": 5,
"time_en": 1,
"text_en": 1,
"image_en": 1,
"sensor_en": 1,
"text": ""
}
}
設定パラメータは以下の通りです:
- params: デバイスパラメータを含むオブジェクト。
- silence_duration: 無音時間、秒単位。
- time_en: タイムスタンプを有効にする、1はオン、0はオフを意味する。
- text_en: アラームテキストを有効にする、1はオン、0はオフを意味する。
- image_en: 画像を有効にする、1はオン、0はオフを意味する。
- sensor_en: センサーを有効にする、1はオン、0はオフを意味する。
- text: アラームテキスト。
ターミナル接続の説明:
| ターミナル | データタイプ | 説明 |
|---|---|---|
| Input | TF_DATA_TYPE_DUALIMAGE_WITH_INFERENCE_AUDIO_TEXT | 前のトリガーブロックからのデータ出力 |
| Output | - | - |
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!お客様の製品体験を可能な限りスムーズにするため、さまざまなサポートを提供いたします。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルをご用意しています。