Bus Servo Driver Board / XIAO Bus Servo Adapter の使用開始
このwikiでは、関連する2つの製品について説明します:Bus Servo Driver Board と XIAO Bus Servo Adapter です。
-
Bus Servo Driver Board は、オンボードのXIAO ESP32-C3マイクロコントローラーを含まず、3Dプリント製エンクロージャーも付属しません。汎用バスサーボインターフェースボードとして機能するよう設計されており、お客様が選択した外部コントローラーを介してサーボを接続・制御できます。
-
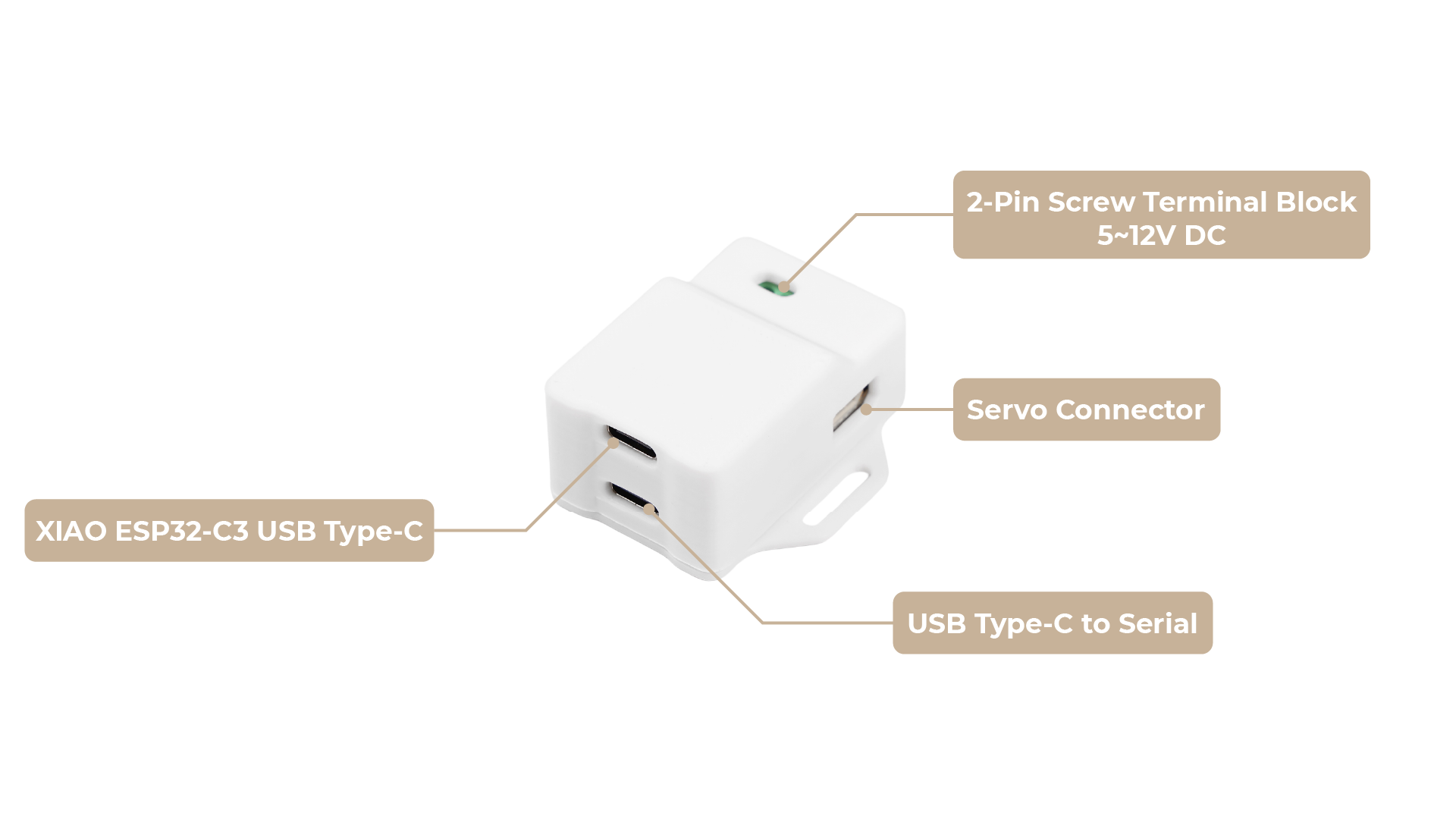
一方、XIAO Bus Servo Adapter は、メインコントローラーとしてXIAO ESP32-C3を含み、3Dプリント製ケースが付属します。このバージョンでは、オンボードのXIAOを使用してバスサーボを直接制御でき、ロボティクスプロジェクト向けのより統合された、すぐに使用できるソリューションとなっています。
両製品のセットアップと使用方法の詳細については、このガイドの残りの部分を参照してください。


はじめに
Bus Servo Driver Board / XIAO Bus Servo Adapterは、Seeed Studioが開発したコンパクトで強力なハードウェアソリューションで、ロボティクスと自動化プロジェクト向けのシリアルバスサーボを駆動するために設計されています。UART通信をサポートし、Feetech SCSシリーズを含む複数のST/SCシリーズサーボからの精密な制御とフィードバックを可能にします(Feetech SCS/STS/TTLシリーズ公式ウェブサイトを参照)。これにより、ロボットアーム、六脚ロボット、ヒューマノイドロボット、サーボ角度と負荷フィードバックが必要な車輪型ロボットなどのアプリケーションに最適です。
このガイドでは、ハードウェアセットアップ、物理的接続、主要仕様、および重要なジャンパー設定に焦点を当て、ユーザーがボードを効果的にプロジェクトに統合できるよう支援します。
サーボや配線を接続または切断する前に、必ず電源を切断してください。損傷を避けるため、入力電圧がサーボの要件と一致することを確認してください。
ハードウェア概要
- Bus Servo Driver Board
- XIAO Bus Servo Adapter
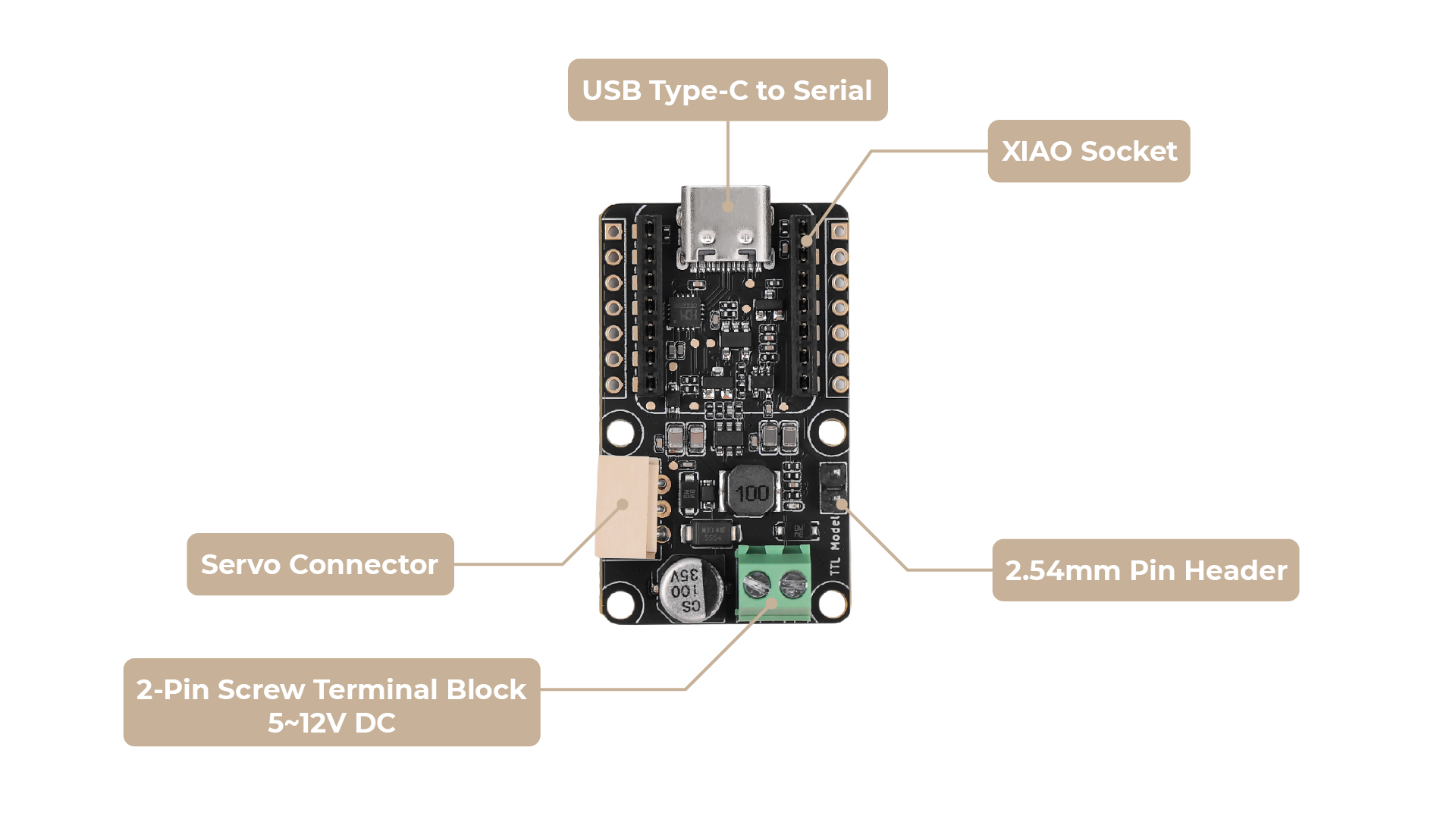
Bus Servo Driver Boardには、いくつかの主要な接続ポイントがあります:
入力:
- DC IN (5.5 * 2.1mm): これはボードと接続されたサーボの電源入力です。ここに5~12Vの電源を接続してください。重要なことに、この電源の電圧はサーボの電圧要件と一致する必要があります。 例えば、STシリーズサーボは通常9Vで動作し、SCシリーズサーボは12Vが必要な場合があります。
出力:
- Servo Interface: この専用ポートは、ST/SCシリーズバスサーボを接続する場所です。コネクタが適切に配置されていることを確認してください。
制御インターフェース:
- UART (RX/TX): これらのピンは、サーボを制御するためのシリアル通信を提供します。接続方法とジャンパー設定は、ホストデバイスによって異なります。詳細については以下を参照してください。
入力:
- DC IN (5.5 * 2.1mm): これはボードと接続されたサーボの電源入力です。ここに5~12Vの電源を接続してください。重要なことに、この電源の電圧はサーボの電圧要件と一致する必要があります。 例えば、STシリーズサーボは通常9Vで動作し、SCシリーズサーボは12Vが必要な場合があります。
出力:
- Servo Interface: この専用ポートは、ST/SCシリーズバスサーボを接続する場所です。コネクタが適切に配置されていることを確認してください。
はじめに
ドライバーボードの動作モードの選択 (Bus Servo Driver Boardのみ)
XIAO Bus Servo Adapterの場合、付属のXIAO ESP32-C3を使用してサーボを制御するために回路を変更する必要はありません。この部分は直接スキップできます。
Bus Servo Driver Boardは2つの主要な接続方法を提供します:直接UART接続とUSB-to-UARTアダプター経由のUSB接続です。適切な動作のためには正しいジャンパー設定が不可欠です。
UART接続(MCU、XIAO、ESP32など用)
この方法は、ESP32、Arduino、Seeed Studio XIAO、またはシングルボードコンピューターなどのマイクロコントローラー(MCU)のUARTピンに直接接続する際に使用されます。
-
配線:
- ドライバーボードの
RXピンをホストデバイスのTXピン(D7)に接続します。 - ドライバーボードの
TXピンをホストデバイスのRXピン(D6)に接続します。 - Seeed Studio XIAOなどのデバイスの場合、XIAOを提供されたヘッダーに直接差し込むことができ、正しいピン配置を確保します。これにより、UART接続用の別途デュポンワイヤーが不要になります。
- ドライバーボードの
-
ジャンパー設定(重要):
- 2.54mmジャンパーキャップを使用して、ボード前面の2pinピンをショートします。(デフォルトでショートされています)

- 2.54mmジャンパーキャップを使用して、ボード前面の2pinピンをショートします。(デフォルトでショートされています)
-
ホストの電源供給: ホストデバイス(例:Raspberry Pi Zero、ESP32、XIAO)には独自の電源供給が必要です。
USB接続
この方法は、USBポートを持つコンピューターまたはシングルボードコンピューター(例:PCまたはRaspberry Pi 4B)に接続する際に使用されます。USBケーブルを使用してコントロールボードをコンピューターに接続するだけです。
-
配線:
- USBケーブルを使用してコントロールボードをコンピューターに接続するだけです。
-
ジャンパー設定(重要):
-
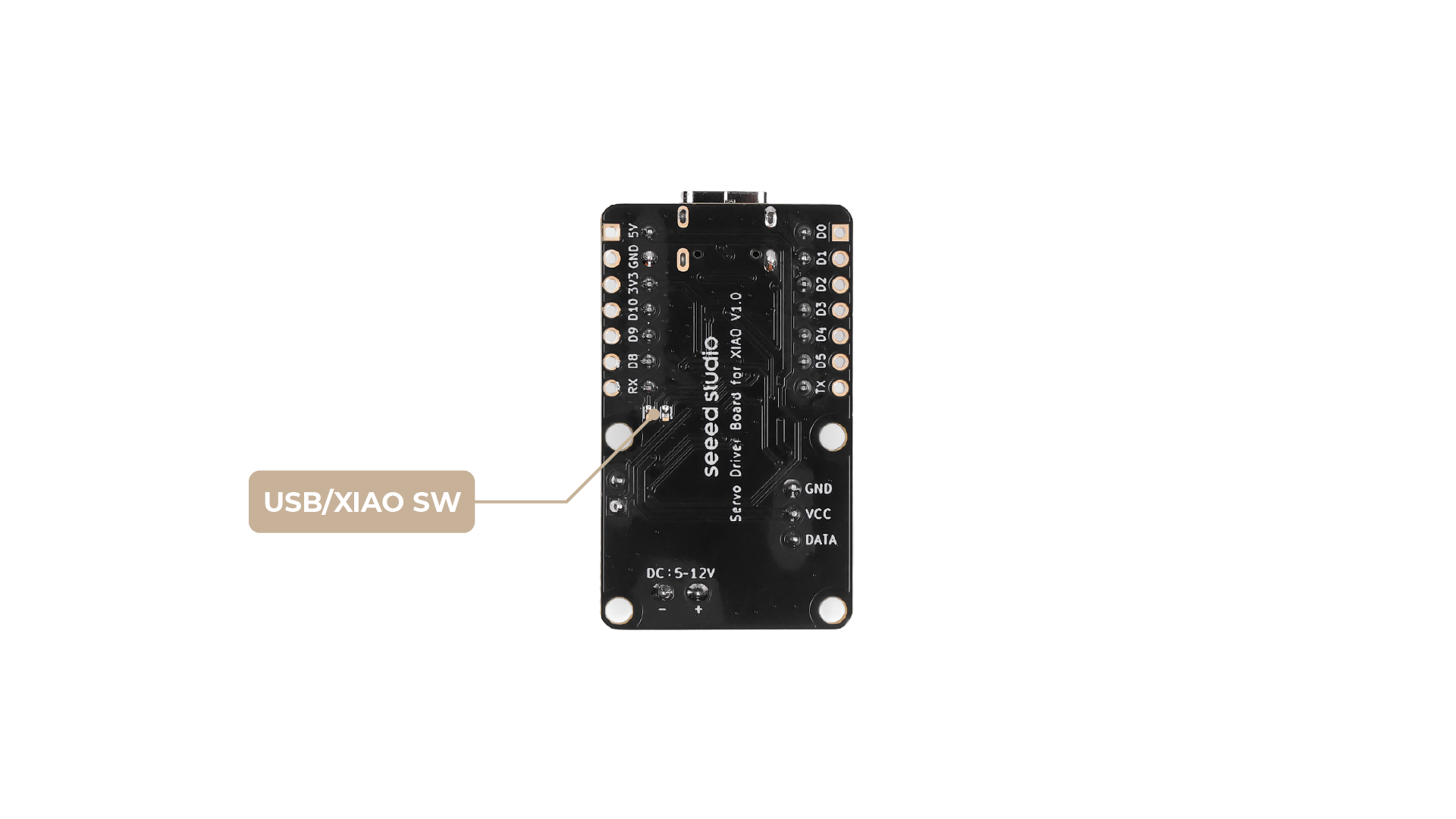
ステップ1. ボード裏面のはんだジャンパーを見つけます。USB通信の場合、2つのパッドが接続されていることを確認する必要があります(それらの間にはんだブリッジがあります)。
-
バージョン1の裏面パッド:

-
バージョン2の裏面パッド:

-
ステップ2. 2.54mmジャンパーキャップを使用して、ボード前面の2pinピンをショートします。(デフォルトでショートされています)
-
必要なコンポーネント(開始前に)
何かを接続する前に、以下があることを確認してください:
- Bus Servo Driver Board / XIAO Bus Servo Adapter
- 対応するST/SCシリーズバスサーボ:Feetech SCS/STS/TTLシリーズ公式ウェブサイトを参照してください。
- 5~12V電源: バッテリーまたは電源アダプター。電圧はサーボの仕様に合致する必要があります。
- ホストデバイス:
- 直接UART用: Raspberry Pi、Arduino、ESP32、またはSeeed Studio XIAOなどのUART対応デバイス。
- USB用: コンピューター(PC、Mac、Linux)またはRaspberry Pi 4Bなどのシングルボードコンピューター、さらに USB-to-UARTアダプター。
XIAO Bus Servo Adapterの場合、XIAO ESP32-C3が内蔵されているため、ホストデバイスを準備する必要はありません。
- 接続ワイヤー/アダプター: 直接UARTを使用する場合はジャンパーワイヤー(デュポンワイヤー)(直接ヘッダー接続でXIAOを使用する場合を除く)。USB接続方法を使用する場合はUSB-to-UARTアダプター。
SCシリーズサーボを使用する場合は、電源供給がそれらの電圧要件に合致することを確認してください。ボードのDC入力ラベルはSTシリーズサーボ用に調整されていますが、SCシリーズの電圧もサポートしています。不正なジャンパー設定はドライバーボードとの通信を妨げます。
USB経由でのサーボ制御
このセクションでは、USB接続を使用してBus Servo Driver Boardを通じて複数のバスサーボを制御する方法について説明します。
原理概要
Bus Servo Driver Boardは、USB経由でホストデバイス(PC、Raspberry Pi、またはマイクロコントローラなど)からシリアル(UART)コマンドを受信することで動作します。これらのコマンドは接続されたバスサーボに中継されます。適切なシリアルプロトコルコマンドを送信することで、各サーボの位置、速度、その他のパラメータを個別に制御できます。
ボード自体はサーボ制御信号を自律的に解釈または生成するのではなく、ホストとサーボ間の透明なブリッジとして機能します。これは、サーボの通信プロトコルに従って正しいコマンドパケットを送信する責任があることを意味します。
参考例
Feetech(ST/SC/STS/TTLシリーズ)バスサーボにコマンドを送信する実用的な例については、以下のPython例を参照してください:
lerobot/common/robot_devices/motors/feetech.py on GitHub
この例では、Feetechサーボを制御するためのシリアルパケットの構築と送信方法を示しています。必要に応じて、コードを独自のホストプラットフォームとプログラミング言語に適応させることができます。
注意:
- 特定のコマンド形式とプロトコルは、サーボモデルによって異なる場合があります。
- 正しいシリアルプロトコルとコマンド構造については、サーボの公式ドキュメントを参照してください。
- サーボの要件に合致するドライバープログラムを作成または適応する必要があります。
Feetech SCS/STS/TTLシリーズプロトコルの詳細については、Feetech公式ドキュメントを参照してください。
XIAO経由でのサーボ制御
次に、XIAOを通じてサーボの動作を制御するための信号送信方法とライブラリの使用方法について説明します。
Arduinoライブラリ概要
Arduinoを初めて使用する場合は、Getting Started with Arduinoを参照することを強くお勧めします。
機能
スケッチの開発を始める前に、ライブラリで利用可能な機能を見てみましょう。
-
SMS_STS(uint8_t id)—— 指定されたIDでサーボオブジェクトを作成します。
パラメータ:uint8_t id(サーボID)
出力:なし -
void WritePos(uint8_t id, int16_t Position, uint16_t Time, uint16_t Speed)—— サーボの目標位置、時間、速度を設定します。
パラメータ:uint8_t id、int16_t Position、uint16_t Time、uint16_t Speed
出力:なし -
void RegWritePos(uint8_t id, int16_t Position, uint16_t Time, uint16_t Speed)—— サーボの目標位置、時間、速度を設定しますが、Actionコマンドで後で実行します。
パラメータ:uint8_t id、int16_t Position、uint16_t Time、uint16_t Speed
出力:なし -
void RegWriteAction()—— 登録されたすべてのRegWritePosコマンドを実行します。
パラメータ:なし
出力:なし -
void WriteSpe(uint8_t id, int16_t Speed)—— サーボの回転速度を設定します。
パラメータ:uint8_t id、int16_t Speed
出力:なし -
void WritePosEx(uint8_t id, int16_t Position, uint16_t Time, uint16_t Speed, uint8_t ACC)—— 位置、時間、速度、加速度を設定します。
パラメータ:uint8_t id、int16_t Position、uint16_t Time、uint16_t Speed、uint8_t ACC
出力:なし -
void RegWritePosEx(uint8_t id, int16_t Position, uint16_t Time, uint16_t Speed, uint8_t ACC)—— 位置、時間、速度、加速度を登録し、後で実行します。
パラメータ:uint8_t id、int16_t Position、uint16_t Time、uint16_t Speed、uint8_t ACC
出力:なし -
void RegWriteActionEx()—— 登録されたすべてのRegWritePosExコマンドを実行します。
パラメータ:なし
出力:なし -
int16_t ReadPos(uint8_t id)—— サーボの現在位置を読み取ります。
パラメータ:uint8_t id
出力:int16_t(位置) -
int16_t ReadSpeed(uint8_t id)—— サーボの現在速度を読み取ります。
パラメータ:uint8_t id
出力:int16_t(速度) -
int16_t ReadLoad(uint8_t id)—— サーボの現在負荷を読み取ります。
パラメータ:uint8_t id
出力:int16_t(負荷) -
int16_t ReadVoltage(uint8_t id)—— サーボの現在電圧を読み取ります。
パラメータ:uint8_t id
出力:int16_t(電圧) -
int16_t ReadTemper(uint8_t id)—— サーボの現在温度を読み取ります。
パラメータ:uint8_t id
出力:int16_t(温度) -
int16_t ReadMove(uint8_t id)—— サーボが動作中かどうかを確認します。
パラメータ:uint8_t id
出力:int16_t(1:動作中、0:停止) -
int16_t ReadCurrent(uint8_t id)—— サーボの電流を読み取ります。
パラメータ:uint8_t id
出力:int16_t(電流) -
void SetID(uint8_t id, uint8_t newid)—— サーボの新しいIDを設定します。
パラメータ:uint8_t id、uint8_t newid
出力:なし -
void Load(uint8_t id)—— サーボのトルクを有効にします。
パラメータ:uint8_t id
出力: なし -
void Unload(uint8_t id)—— サーボのトルクを無効にします。
パラメータ:uint8_t id
出力: なし -
int16_t ReadTorque(uint8_t id)—— サーボのトルク状態を読み取ります。
パラメータ:uint8_t id
出力:int16_t(1: 有効, 0: 無効) -
void LEDAlarm(uint8_t id, uint8_t enable)—— LEDアラーム状態を設定します。
パラメータ:uint8_t id,uint8_t enable
出力: なし -
void Reset(uint8_t id)—— サーボを工場出荷時設定にリセットします。
パラメータ:uint8_t id
出力: なし -
void LockEprom(uint8_t id)—— サーボのEEPROMをロックします。
パラメータ:uint8_t id
出力: なし -
void UnlockEprom(uint8_t id)—— サーボのEEPROMをアンロックします。
パラメータ:uint8_t id
出力: なし
XIAO の例
ライブラリがインストールされ、基本的な機能を理解したので、産品名称 の動作を確認するためにいくつかの例を実行してみましょう。
ステップ 1. Arduino アプリケーションを起動します。
ステップ 2. 開発ボードモデルを選択し、Arduino IDE に追加します。
- 後のルーチンで Seeed Studio XIAO ESP32-C3 を使用するには、このチュートリアル を参照して追加を完了してください。
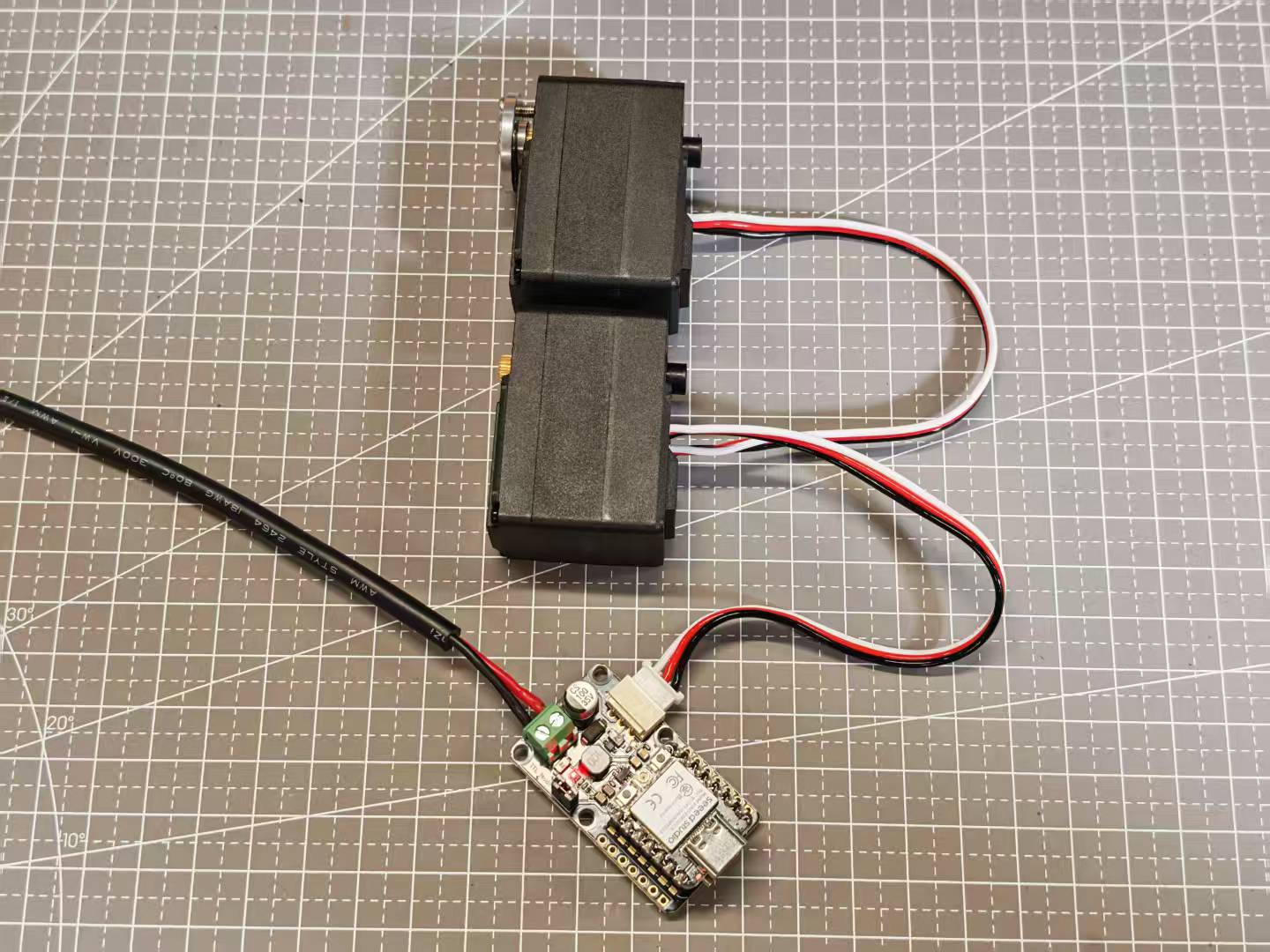
ステップ 3. 図に示すように配線を完了します。複数のサーボを接続する必要がある場合は、サーボに付属のワイヤーを使用して接続を完了できます。
複数のサーボを制御する
#include <SCServo.h>
// Define the correct serial port for your target board
#if defined(CONFIG_IDF_TARGET_ESP32C3) || defined(CONFIG_IDF_TARGET_ESP32C6) || defined(CONFIG_IDF_TARGET_ESP32S3)
#define COMSerial Serial0
#else
#define COMSerial Serial1
#endif
// Define RX/TX pins for the servo bus (for reference)
// Note: On ESP32, pins are usually specified in COMSerial.begin().
// For example: COMSerial.begin(1000000, SERIAL_8N1, S_RXD, S_TXD);
// If your board uses the default pins for Serial1, no extra specification is needed.
#define S_RXD D7
#define S_TXD D6
#define SERVO_NUM 2 // Number of servos
SMS_STS st; // Servo control object
// --- Servo Configuration ---
byte ID[SERVO_NUM] = {1, 2}; // IDs of the servos
u16 Speed[SERVO_NUM] = {1500, 1500}; // Set a medium speed for the servos
byte ACC[SERVO_NUM] = {50, 50}; // Set a medium acceleration for the servos
s16 Pos[SERVO_NUM] = {2048, 2048}; // Servo position array, initialized to the midpoint (2048)
void setup()
{
// Start the main serial port for debugging and receiving commands
Serial.begin(115200);
// Wait a moment for the Serial Monitor to connect
delay(2000);
Serial.println("--- Servo Control Program Start ---");
// Start the serial port for controlling the servos
COMSerial.begin(1000000, SERIAL_8N1);
st.pSerial = &COMSerial; // Associate the control object with the serial port
Serial.println("Checking servo connection status...");
for (int i = 0; i < SERVO_NUM; i++) {
if (st.Ping(ID[i]) != -1) {
Serial.print("Servo with ID ");
Serial.print(ID[i]);
Serial.println(" is connected.");
} else {
Serial.print("Error: Servo with ID ");
Serial.print(ID[i]);
Serial.println(" is not responding!");
}
}
// --- Power-on Self-Test ---
// This section makes the servos move automatically on power-up to confirm they are working correctly.
Serial.println("\nExecuting power-on self-test movement...");
// 1. Move to position 1024
Serial.println("Moving to position 1024...");
for(int i=0; i<SERVO_NUM; i++) {
Pos[i] = 1024;
}
st.SyncWritePosEx(ID, SERVO_NUM, Pos, Speed, ACC);
delay(2000); // Wait for the movement to complete
// 2. Move to position 3072
Serial.println("Moving to position 3072...");
for(int i=0; i<SERVO_NUM; i++) {
Pos[i] = 3072;
}
st.SyncWritePosEx(ID, SERVO_NUM, Pos, Speed, ACC);
delay(2000); // Wait for the movement to complete
// 3. Return to center position (2048) to prepare for user commands
Serial.println("Returning to center position (2048)...");
for(int i=0; i<SERVO_NUM; i++) {
Pos[i] = 2048;
}
st.SyncWritePosEx(ID, SERVO_NUM, Pos, Speed, ACC);
delay(1500);
Serial.println("\n--- Initialization Complete ---");
Serial.println("Enter 'j' to decrease the angle, or 'k' to increase it.");
Serial.println("-----------------------------------");
}
void loop()
{
// Check if the user has sent a command via the Serial Monitor
if (Serial.available()) {
String input = Serial.readString();
input.trim(); // Remove extra spaces or newlines
bool shouldMove = false; // Flag to indicate if a valid command was received
if (input.startsWith("j")) {
Serial.println("Received command: 'j'. Decreasing angle.");
for (int i = 0; i < SERVO_NUM; i++) {
Pos[i] -= 512; // Move a small step for easy observation
if (Pos[i] < 0) {
Pos[i] = 0; // Prevent going below the minimum range
}
}
shouldMove = true;
} else if (input.startsWith("k")) {
Serial.println("Received command: 'k'. Increasing angle.");
for (int i = 0; i < SERVO_NUM; i++) {
Pos[i] += 512; // Move a small step
if (Pos[i] > 4095) {
Pos[i] = 4095; // Prevent going above the maximum range
}
}
shouldMove = true;
} else {
Serial.print("Unknown command: '");
Serial.print(input);
Serial.println("'. Please enter 'j' or 'k'.");
}
// If a valid command was received, send the new positions to the servos
if (shouldMove) {
Serial.print("Moving servos to new positions: [");
for(int i = 0; i < SERVO_NUM; i++){
Serial.print(Pos[i]);
if(i < SERVO_NUM - 1) Serial.print(", ");
}
Serial.println("]");
st.SyncWritePosEx(ID, SERVO_NUM, Pos, Speed, ACC);
}
}
}
この例では、XIAOとSCServoライブラリを使用して複数のFeetech SCSシリーズバスサーボを制御する方法を示しています。コードは2つのサーボを初期化し、キャリブレーションを行い、シリアルコマンドを通じてユーザーがサーボの位置をインタラクティブに調整できるようにします。シリアルモニターから'j'または'k'を送信すると、コードはそれぞれ接続されたすべてのサーボの角度を減少または増加させます。各サーボの現在位置が追跡・更新され、新しい位置はSyncWritePosEx関数を使用してサーボに送信されます。
独自のプロジェクト用にカスタマイズする方法:
-
サーボ数:
Servo_Numの値を変更し、ID、Speed、ACC、Pos配列をサーボの数とIDに合わせて更新します。 サーボID: ID配列を接続されたサーボのIDに合わせて変更します。 -
速度と加速度: Speed配列とACC配列を調整して、各サーボに異なる速度と加速度を設定します。
-
シリアルピン: UARTに異なるピンを使用する場合は、S_RXDとS_TXDの定義を更新します。
-
動作ロジック:
loop()関数内のロジックを変更して、異なるシリアルコマンドへの応答、センサーフィードバックの追加、他のハードウェアとの統合など、より複雑またはプロジェクト固有の動作を実装できます。 -
初期位置:
Pos配列の初期値を設定して、サーボの開始位置を定義します。
FAQs
プロジェクトを開始する前に、これらのFAQを読むことをお勧めします。よくある質問と潜在的な問題について説明しています。
電源電圧がサーボと一致しない場合はどうなりますか?
ボードとサーボが誤動作したり、損傷を受ける可能性があります。常に入力電圧をサーボの要件に合わせてください。
複数のサーボを同時に接続できますか?
はい、複数のサーボがサポートされていますが、電源が合計電流消費に対応できることを確認してください。
Resources
- [PDF] Bus Servo Driver Board Schematic
- [STL] XIAO Bus Servo Adapter upper shell
- [STL] XIAO Bus Servo Adapter lower shell
技術サポート・製品ディスカッション
私たちの製品をお選びいただき、ありがとうございます!私たちは、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。