DAPLinkデバッガ

はじめに
XIAO Debug MateのDAPLink機能の公式ユーザーマニュアルへようこそ。この包括的なガイドは、初心者から上級者まで、プロフェッショナルなデバッグタスクにおいてXIAO Debug Mateの潜在能力を最大限に引き出すことを目的として設計されています。ここでは、DAPLinkデバッガの接続、設定、操作方法を学び、必要なソフトウェアツールを理解し、幅広いXIAO シリーズ開発ボードでスムーズで生産的なデバッグ体験を確保するためのベストプラクティスに従うことができます。複雑なファームウェアのトラブルシューティングや開発ワークフローの合理化など、このドキュメントは、プロジェクトを最初から最後まで支援するための明確なステップバイステップの手順、ヒント、詳細な技術説明を提供します。
デバッガの概念についての説明
XIAO Debug MateのDAPLink機能を効果的に使用するには、デバッグを可能にするために連携する主要なソフトウェアコンポーネントとプロトコルを理解することが役立ちます。以下は、各概念とそれらの相互関係の詳細です。
GDB
GDB(GNU Project Debugger)は、デバッグプロセスの中核エンジンです。これは、ホストコンピュータ(PC)上で動作する強力なコマンドラインツールです。GDBは、ターゲットマイクロコントローラ上でのプログラムの実行を制御する責任があります。以下のことが可能です:
- プログラムの開始と停止。
- 特定のコード行で実行を一時停止するブレークポイントの設定。
- コードを1行ずつステップ実行。
- 変数の値やメモリレジスタの内容の検査。
VS Code(PlatformIOを使用)やEclipseなどの最新の統合開発環境(IDE)の多くは、GDBのフロントエンドとして機能するグラフィカルユーザーインターフェースを提供し、クリックをGDBコマンドに変換します。
OpenOCD/PyOCD
OpenOCD(Open On-Chip Debugger)と**PyOCD**は、ホストコンピュータ上で動作する重要な「サーバー」アプリケーションです。これらは、GDBからの高レベルコマンドと物理デバッグプローブ(この場合はXIAO Debug Mate)が必要とする低レベル信号との間のブリッジまたは翻訳者として機能します。
GDBが「変数xの値を読み取る」などのコマンドを発行すると、OpenOCDはこのコマンドを受信し、デバッグプローブが理解する命令のシーケンスに変換し、これらの命令をUSB経由でプローブに送信します。
DAPLink
**DAPLink**は、XIAO Debug MateのESP32-S3マイクロコントローラ上で動作するオープンソースファームウェアです。このファームウェアは、Debug Mateを完全に機能するデバッグプローブに変換します。その主な役割は、CMSIS-DAPプロトコルを実装することで、USB経由でホストコンピュータからデバッグコマンドを受信し、ターゲットチップのデバッグピン(SWD)と物理的に相互作用することを可能にします。本質的に、DAPLinkは、OpenOCDから送信された命令を実行するデバイス上の「エージェント」です。
CMSIS-DAP
CMSIS-DAP(Cortex Microcontroller Software Interface Standard - Debug Access Port)は、ホストコンピュータがUSB経由でデバッグプローブと通信する方法を定義する標準化されたプロトコルです。XIAO Debug MateのDAPLinkファームウェアがこの標準に準拠しているため、独自のドライバやソフトウェアを必要とすることなく、OpenOCD、PyOCD、Keil MDKなどの幅広い業界標準ツールと即座に互換性があります。
Telnet
Telnetは、シンプルなテキストベースのネットワークプロトコルです。デバッグの文脈では、OpenOCDは特定のポート(通常はポート4444)でTelnetサーバーを開くことがよくあります。これにより、OpenOCDサーバー自体への直接的で人間が読める形式のコマンドラインインターフェースが提供されます。GDBはアプリケーションレベルのデバッグに使用されますが、Telnetインターフェースは、OpenOCDの設定、デバッグプローブの状態の検査、低レベルリセットコマンドの発行などの高度なタスクに有用です。
連携の仕組み
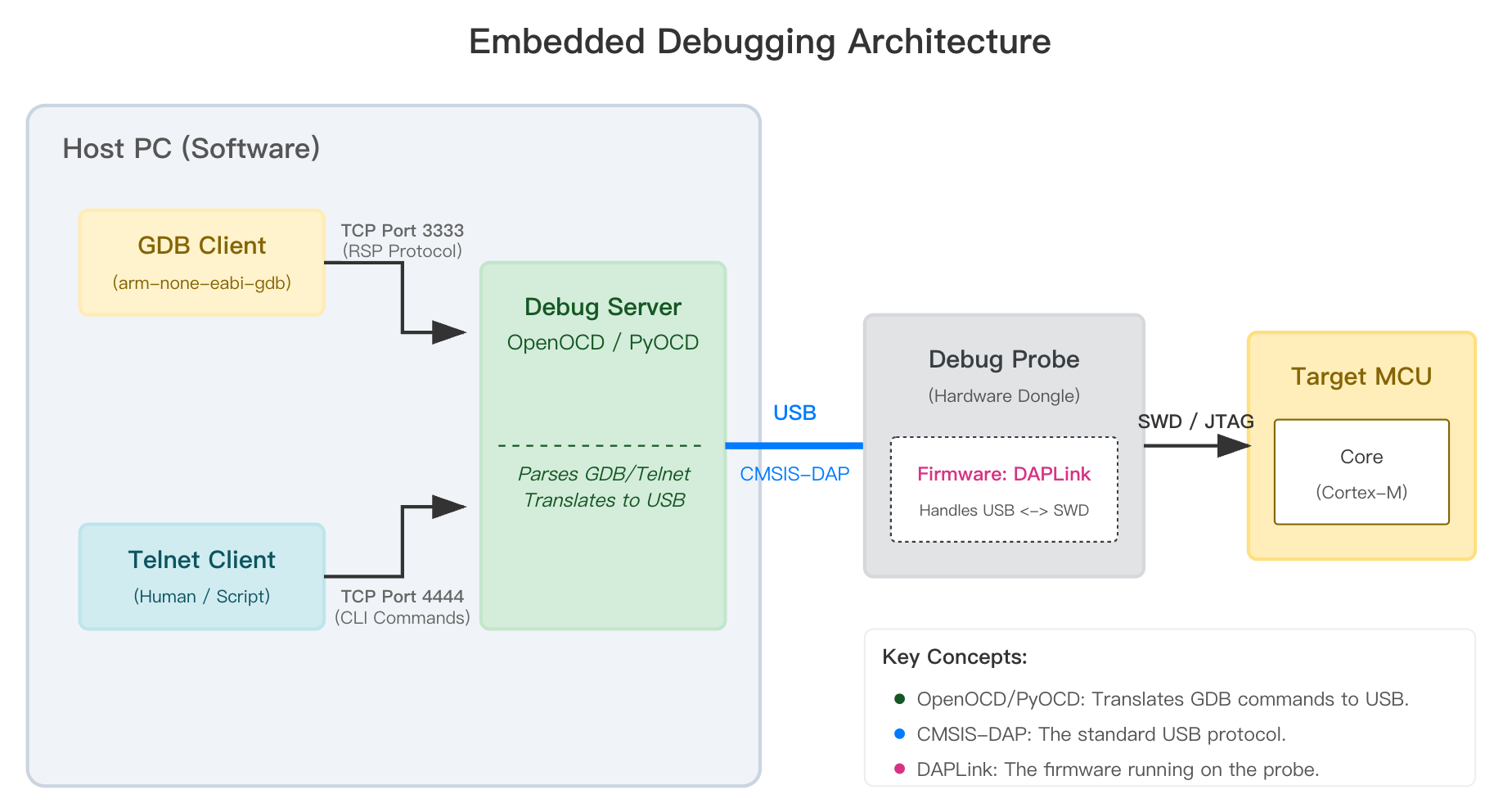
以下は、IDEからターゲットXIAOまでの全体的なデバッグチェーンの概要です:
- あなた(IDE内で)「Start Debugging」をクリックします。
- IDEが適切なプログラムファイルでGDBを起動します。
- GDBがPC上で動作しているOpenOCDサーバーに接続します。
- OpenOCDがUSB経由で接続されたXIAO Debug Mateを検出します。CMSIS-DAPプロトコルを使用してデバイスと通信します。
- Debug Mate上のDAPLinkファームウェアがこれらのCMSIS-DAPコマンドを受信します。
- DAPLinkがこれらのコマンドをSWD(Serial Wire Debug)ピン(SWDIOとSWCLK)上の電気信号に変換します。
- これらのSWD信号は、ターゲットXIAO内のARM Cortexコアを直接制御し、OpenOCDとGDBがCPUを一時停止し、メモリを読み取り、その他すべてのデバッグアクションを実行することを可能にします。
要約すると:GDBは司令官、OpenOCDは翻訳者、CMSIS-DAPは彼らが話す言語、そしてDAPLinkは命令を実行する現場の兵士です。
デバッグの開始
互換性チェック
XIAO Debug Mateは、XIAO エコシステム全体向けに設計されていますが、DAPLinkデバッグ機能はARM Cortex-Mコア専用です。ただし、UARTと電力監視機能は、アーキテクチャに依存しないため、汎用的に互換性があります。詳細な互換性情報については、以下の表を参照してください。
| XIAOモデル | コアアーキテクチャ | DAPLinkデバッグ | UARTモニタ | 電力アナライザ |
|---|---|---|---|---|
| XIAO SAMD21 | ARM Cortex-M0+ | ✅ | ✅ | ✅ |
| XIAO RP2040 | ARM Cortex-M0+ | ✅ | ✅ | ✅ |
| XIAO RP2350 | ARM Cortex-M33 | ✅ | ✅ | ✅ |
| XIAO nRF52840 | ARM Cortex-M4 | ✅ | ✅ | ✅ |
| XIAO RA4M1 | ARM Cortex-M4 | ✅ | ✅ | ✅ |
| XIAO MG24 | ARM Cortex-M33 | ✅ | ✅ | ✅ |
| XIAO nRF54L15 | ARM Cortex-M33 | ❌ | ✅ | ✅ |
| XIAO ESP32-C3 | RISC-V | ❌ | ✅ | ✅ |
| XIAO ESP32-C5 | RISC-V | ❌ | ✅ | ✅ |
| XIAO ESP32-C6 | RISC-V | ❌ | ✅ | ✅ |
| XIAO ESP32-S3 | Xtensa LX7 | ❌ | ✅ | ✅ |
ソフトウェアの準備
デバッグを開始する前に、必要なソフトウェアでホストコンピュータをセットアップする必要があります。
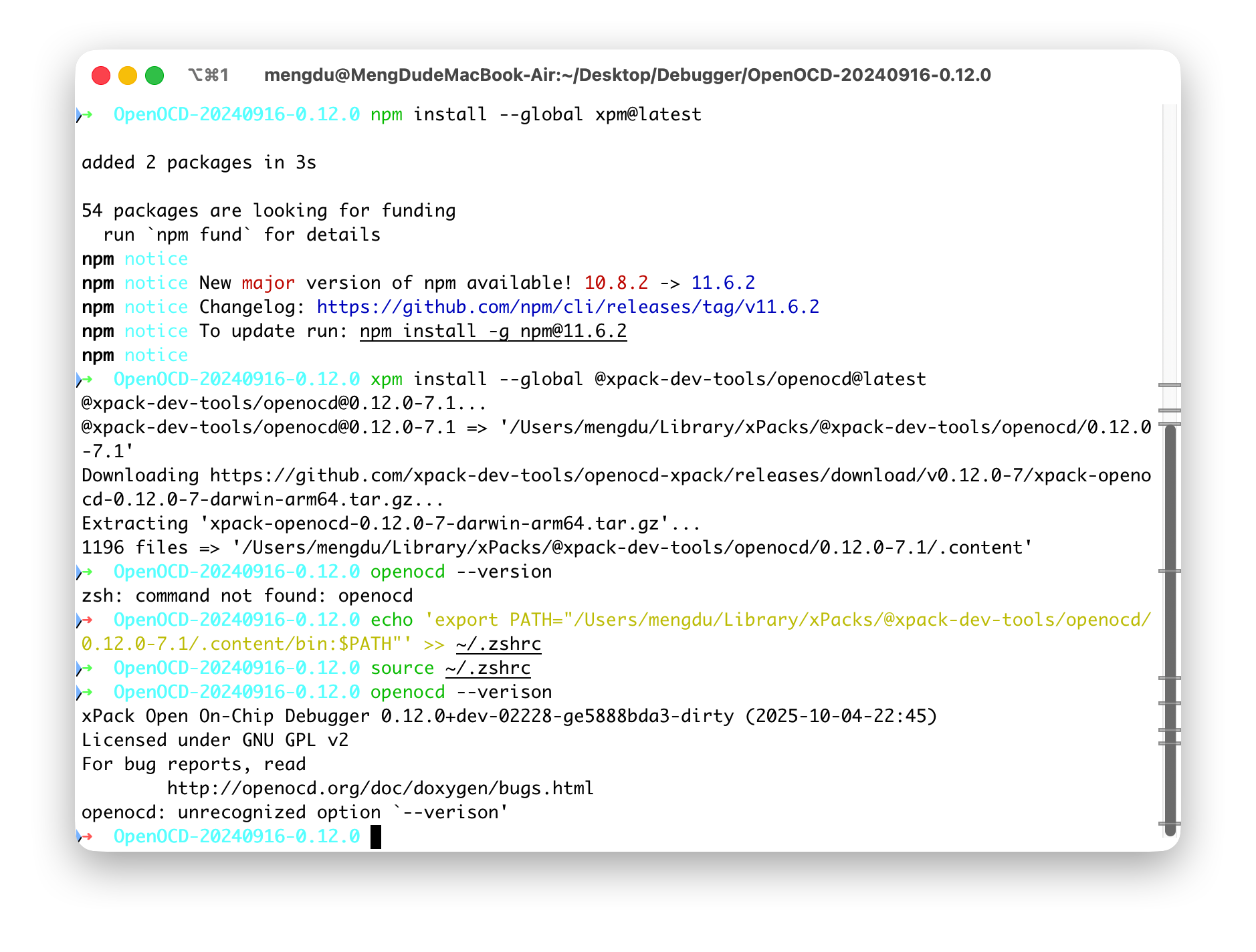
OpenOCDのインストール
検証済み:OpenOCDバージョン0.12.0-7以降をご使用ください。
互換性を確保し、最新機能にアクセスするために、xPack版のOpenOCDの使用を強く推奨します。システムパッケージマネージャー(macOSのHomebrewやLinuxのAPTなど)は、多くの場合、最新のターゲットで正しく動作しない可能性がある古いバージョンを提供します。
VS CodeでPlatformIO拡張機能を使用している場合、PlatformIOはデバッグセッションを開始する際に、プロジェクトに適したOpenOCDの正しいバージョンを自動的にダウンロードして設定します。
- Windows
- MacOS
- Linux
Windowsでは、手動インストール方法が簡単です。
- OpenOCDパッケージのダウンロード
xPack OpenOCDリリースページにアクセスします。最新リリースは常に最上部にリストされています。最上部のリリースでWindows版(例:xpack-openocd-...-win32-x64.zip)を見つけて、このファイルをダウンロードします。
- ファイルの展開
ダウンロードしたZIPファイルを右クリックし、「すべて展開...」を選択します。C:\Users\YourName\AppData\Local\xPacks\OpenOCDなどの安定した場所を選択します。展開後、binディレクトリを含むxpack-openocd-0.12.0-7のようなフォルダができます。
- OpenOCDをシステムPATHに追加
これにより、任意のターミナルからopenocdを実行できるようになります。
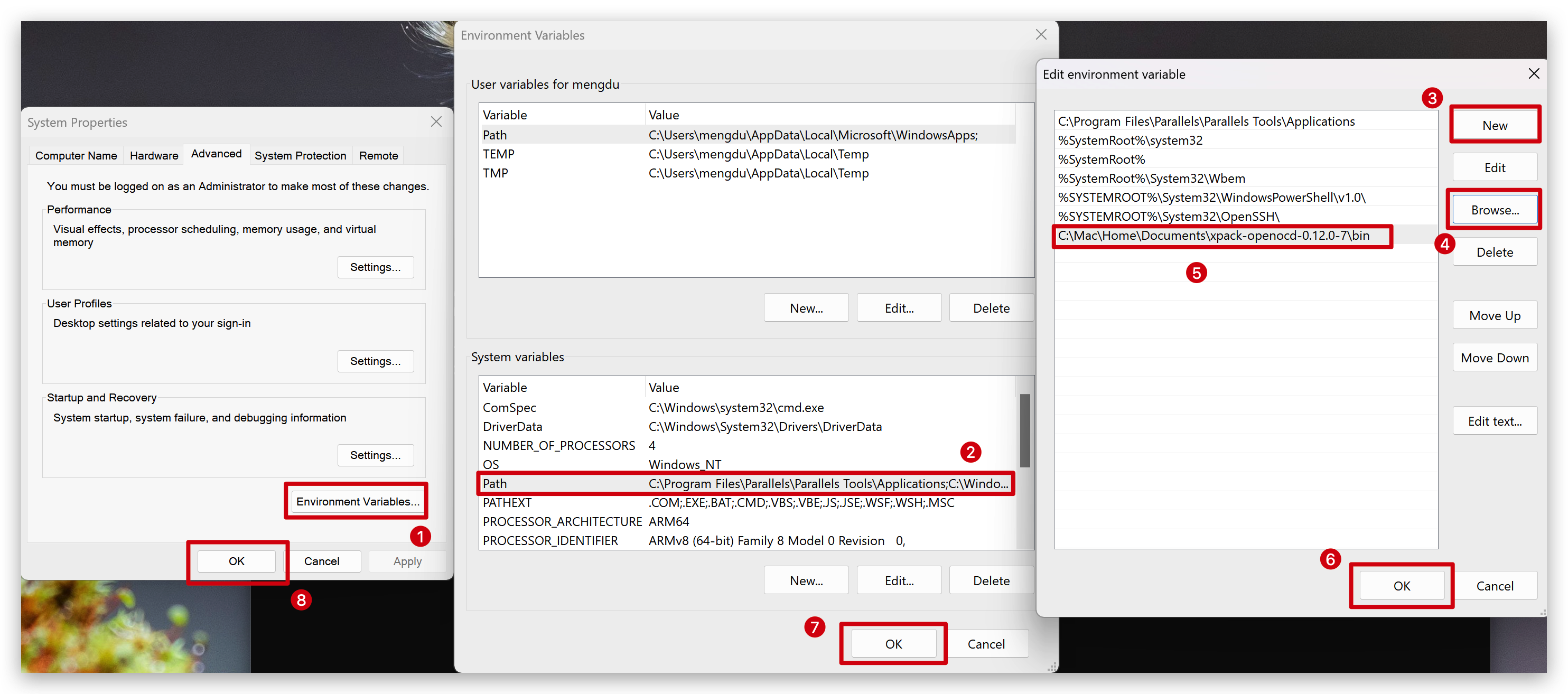
- スタートメニューで「Environment Variables」を検索し、「Edit the system environment variables」を選択します。
- **「Environment Variables...」**をクリックします。
- 「System variables」の下で、**「Path」変数を選択し、「Edit...」**をクリックします。
- **「New」**をクリックし、先ほど展開した
binディレクトリへの完全パスを貼り付けます。例:
C:\Users\YourName\AppData\Local\xPacks\OpenOCD\xpack-openocd-0.12.0-7\bin - すべてのウィンドウでOKをクリックして保存します。
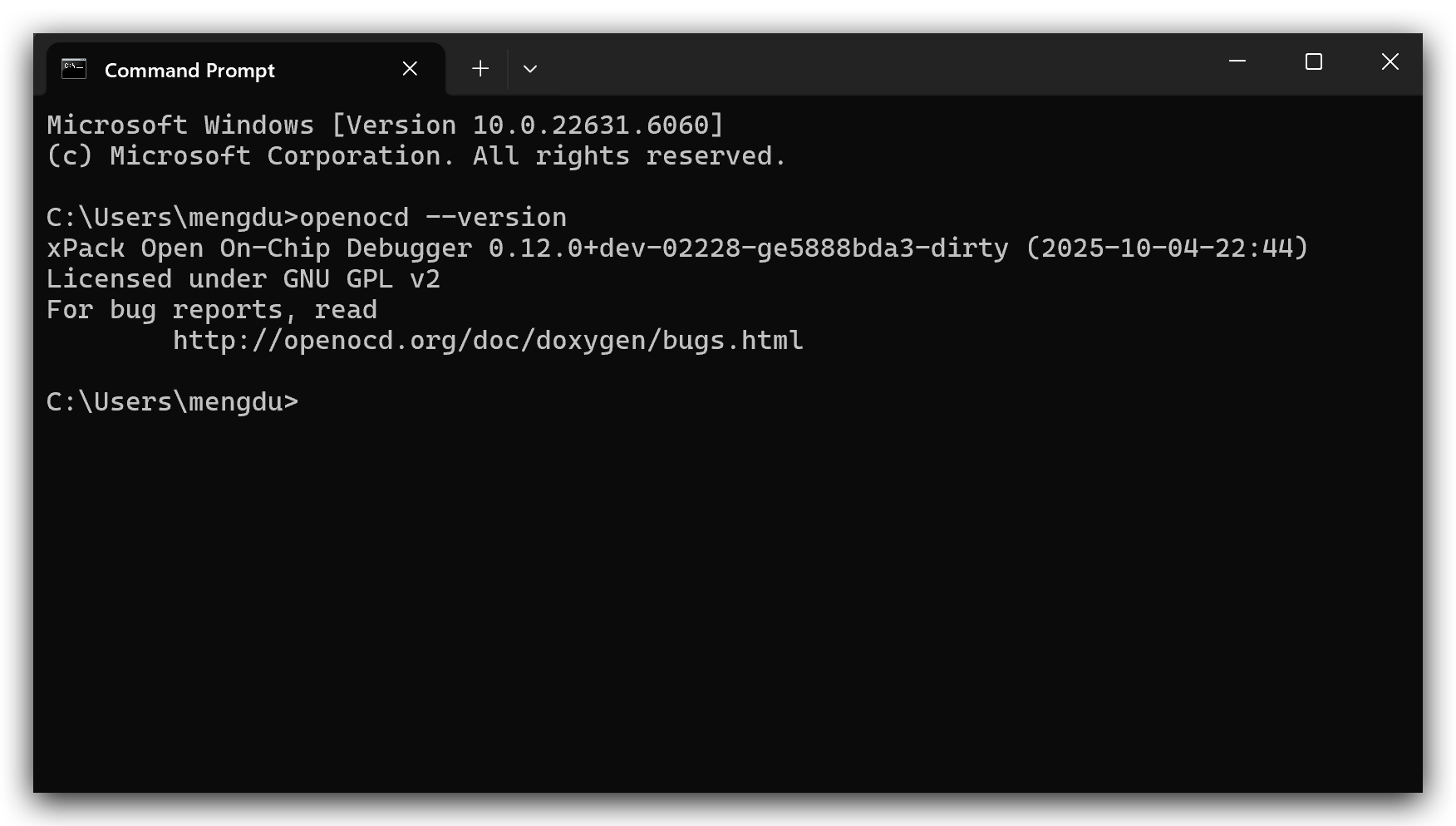
- インストールの確認
新しいコマンドプロンプトまたはPowerShellウィンドウを開き、以下を実行します:
openocd --version
インストールが成功した場合、バージョン情報が表示されます(例:xPack Open On-Chip Debugger 0.12.0+dev-02228)。
このプロセスは、Windowsの手動セットアップと同様です。
- OpenOCDパッケージをダウンロード
xPack OpenOCDリリースページにアクセスします。最新リリースを見つけて、お使いのMacに適したアーカイブをダウンロードします(例:Intel用は...-darwin-x64.tar.gz、Apple Silicon用は...-darwin-arm64.tar.gz)。
- ファイルを展開
ターミナルを開いて以下のコマンドを実行します。ホームディレクトリに標準的な場所を作成します。
# Create a directory for xPack tools if it doesn't exist
mkdir -p ~/opt
# Go to the Downloads folder (or wherever you saved the file)
cd ~/Downloads
# Extract the archive into the opt directory
tar -xvf xpack-openocd-*.tar.gz -C ~/opt
- OpenOCDをPATHに追加
シェルにopenocd実行ファイルの場所を教える必要があります。現代のmacOSのデフォルトシェルはZshです。
# Add the path to your .zshrc file (for Zsh)
echo 'export PATH="$HOME/opt/xpack-openocd-0.12.0-7/bin:$PATH"' >> ~/.zshrc
xpack-openocd-0.12.0-7を実際に作成されたフォルダ名に置き換えてください。Bashを使用している場合は、~/.zshrcの代わりに~/.bash_profileを編集してください。
- 適用と確認
行ったPATHの変更は、設定ファイルが再読み込みされるまで現在のターミナルセッションでは有効になりません。
既存のターミナルで以下のコマンドを実行します:
# For Zsh (default on modern macOS)
source ~/.zshrc
次に、以下を実行してインストールを確認します:
openocd --version
正しいxPackバージョン情報が表示されるはずです。
このプロセスは他のオペレーティングシステムでの手動セットアップと同様です。
- OpenOCDパッケージをダウンロード
xPack OpenOCDリリースページにアクセスします。最新リリースを見つけて、Linuxアーカイブ(...-linux-x64.tar.gz)をダウンロードします。
- ファイルを展開
ターミナルを開いて以下のコマンドを実行します。
# Create a directory for xPack tools if it doesn't exist
mkdir -p ~/opt
# Go to the Downloads folder
cd ~/Downloads
# Extract the archive into the opt directory
tar -xvf xpack-openocd-*.tar.gz -C ~/opt
- OpenOCDをPATHに追加
シェルにopenocd実行ファイルの場所を教える必要があります。ほとんどのLinuxディストリビューションはBashシェルを使用しています。
# Add the path to your .bashrc file
echo 'export PATH="$HOME/opt/xpack-openocd-0.12.0-7/bin:$PATH"' >> ~/.bashrc
xpack-openocd-0.12.0-7を実際に作成されたフォルダ名に置き換えてください。
- 適用と確認
行ったPATHの変更は、設定ファイルが再読み込みされるまで現在のターミナルセッションでは有効になりません。
既存のターミナルで以下のコマンドを実行します:
# For Bash (default on most Linux distros)
source ~/.bashrc
次に、以下を実行してインストールを確認します:
openocd --version
正しいxPackバージョン情報が表示されるはずです。
PyOCDのインストール
XIAO RA4M1のファームウェア書き込み機能を使用する予定の場合は、ここの手順を参照してPyOCDを追加でダウンロードして使用する必要があります。
PyOCDは、Arm Cortex-Mマイクロコントローラのプログラミングとデバッグ用のPythonベースのツールです。
- Windows
- MacOS
- Linux
-
前提条件 システムにPythonがインストールされていることを確認してください。インストールされていない場合は、公式のpython.orgウェブサイトからダウンロードし、インストール時に**「Add Python to PATH」**のボックスにチェックを入れてください。
-
PyOCDをインストール コマンドプロンプトまたはPowerShellウィンドウを開いて、以下のコマンドを実行します:
pip install -U pyocd -
XIAO RA4M1サポートパックをインストール XIAO RA4M1は
R7FA4M1ABチップを使用しています。PyOCDがそれを認識するために、特定のサポートパックをインストールする必要があります。パックを検索して利用可能性を確認します:
pyocd pack find r7fa4m1abパックをインストールします:
pyocd pack install r7fa4m1ab -
ターゲットを確認 ターゲットが認識されているかを確認します:
pyocd list --targetsリストに
r7fa4m1abが表示されるはずです。
-
前提条件 MacOSには通常Pythonが付属していますが、Homebrewまたはオフィシャルインストーラーを使用して最新バージョンを取得することをお勧めします。ターミナルを開いてください。
-
PyOCDをインストール ターミナルで以下のコマンドを実行します:
pip3 install -U pyocd -
XIAO RA4M1サポートパックをインストール XIAO RA4M1は
R7FA4M1ABチップを使用しています。特定のサポートパックをインストールする必要があります。パックを検索します:
pyocd pack find r7fa4m1abパックをインストールします:
pyocd pack install r7fa4m1ab -
ターゲットを確認 ターゲットが認識されているかを確認します:
pyocd list --targets
-
前提条件 パッケージマネージャーを使用して
python3とpipがインストールされていることを確認してください(例:Ubuntuではsudo apt install python3-pip)。USB権限Linuxでは、
sudoを使用せずにUSBデバイスにアクセスできるようにudevルールを設定する必要がある場合があります。 -
PyOCDをインストール ターミナルで以下のコマンドを実行します:
pip3 install -U pyocd -
XIAO RA4M1サポートパックをインストール XIAO RA4M1は
R7FA4M1ABチップを使用しています。パックを検索します:
pyocd pack find r7fa4m1abパックをインストールします:
pyocd pack install r7fa4m1ab -
ターゲットを確認 ターゲットが認識されているかを確認します:
pyocd list --targets
XIAO_Debug_Mate_DAPLink_Packageパッケージの理解
DAPLinkデバッガー機能の使用を開始する前に、ZIPファイルを別途ダウンロードする必要があります。このファイルには、さまざまなXIAOボードのデバッグに必要なすべてのファイルが含まれています。
ディレクトリ構造の説明
ファイルを解凍すると、以下のフォルダ構造が表示されます。各部分には特定の目的があります:
XIAO_Debug_Mate_DAPLink_Package/
├── examples/
│ ├── Blink_nrf52840.elf
│ ├── Blink_SAMD21.bin
│ └── ... (other example firmwares)
├── target/
│ ├── XIAO_RA4M1/
│ │ └── ra4m1.cfg
│ └── XIAO_SAMD21/
│ └── at91samd21g18.cfg
├── XIAO_MG24_Mac_Linux_OpenOCD-v0.12.0/
│ ├── bin/
│ │ └── openocd
│ └── share/
│ └── ... (OpenOCD scripts)
└── XIAO_MG24_Win_OpenOCD-v0.12.0/
├── bin/
│ └── openocd.exe
└── share/
└── ... (OpenOCD scripts)
-
examples/このフォルダには、ArduinoからエクスポートされたさまざまなXIAOボード用のプリコンパイル済みサンプルファームウェアファイル(例:.bin、.elf、.hex)が含まれています。これらは後のチュートリアルでマイクロコントローラーの書き込みとデバッグ方法を実演するために使用されます。 -
target/このフォルダには、公式のOpenOCDディストリビューションに含まれていない可能性があるXIAOボード用のターゲット設定(.cfg)ファイルが含まれています。XIAO SAMD21やXIAO RA4M1などのボードをシステムの既存のOpenOCDインストールで使用する場合、これらの設定ファイルをOpenOCD環境に手動で追加する必要があります。具体的な手順については後で説明します。 -
XIAO_MG24_..._OpenOCD-v0.12.0/これはXIAO MG24ボード用の特別で非常に重要なコンポーネントです。現在、このチップのサポートは公式のOpenOCDリリースや標準のxPackディストリビューションでは利用できません。この問題を解決するため、Windows用(XIAO_MG24_Win_...)とmacOS/Linux用(XIAO_MG24_Mac_Linux_...)の両方に対して、完全でスタンドアロンのOpenOCDパッケージを提供しています。XIAO MG24を使用する場合は、これらの特定のフォルダ内で提供されるopenocd実行ファイルを必ず使用してください。
ハードウェアの準備
デバッグ用のハードウェア接続は簡単です。
XIAOボード用
一般的に、Debug Mate上のXIAOのすべての機能は、特に指定がない限り、XIAOへの追加電源供給を必要としません。
XIAO Debug Mateは、すべてのSeeed Studio XIAOボードとのシームレスなプラグアンドプレイ体験を提供するように設計されています。
- XIAOボードを取り、Debug Mateのメスヘッダーに合わせます。
- XIAOのUSB-Cポートが、Debug MateのUSB-Cポートと同じ方向を向いていることを確認してください。
- XIAOを完全に装着されるまでソケットにまっすぐしっかりと押し込みます。これにより、Debug Mateのポゴピンが、XIAOの裏面のSWDパッドとしっかりと接続されます。

XIAO SAMD21、XIAO RP2040、XIAO nRF52840などの初期のXIAOボードの一部は、裏面パッドの統一規格が確立される前に設計されました。Debug Mateのポゴピンは可能な限り互換性があるように配置されていますが、これらの古いボードのわずかな違いにより、完璧な接触が得られない場合があります。
デバッグ接続が不安定な場合は、ソケット内でXIAOボードの位置を少し調整してみてください。完全に押し込む必要がない場合があります。わずかなずらしで、ポゴピンがXIAOの裏面のSWDパッドとしっかりと接触することがよくあります。
XIAOとDebug Mateのホットスワップは強く推奨しません!
その他の開発ボード向け
XIAO Debug Mateは、他のARMベースの開発ボード用の汎用SWDデバッグプローブとしても使用できます。

- 4本のデュポンワイヤー(ターゲットボードに応じてメス-オスまたはメス-メス)が必要です。
- ターゲットボード上のSWDデバッグピンを見つけます。これらは通常
SWDIO、SWCLK、GND、そして時にはVTrefまたはVCCとラベル付けされています。 - XIAO Debug Mateの拡張ヘッダーからターゲットボードに以下のようにワイヤーを接続します:
| XIAO Debug Mate ピン | ターゲットボードピン | 説明 |
|---|---|---|
SWDIO | SWDIO | シリアルワイヤデータ入出力 |
SWCLK | SWCLK | シリアルワイヤクロック |
GND | GND | 共通グランド |
VCC | VTref または 3V3 | ターゲット電圧リファレンス(レベルシフトに重要) |
接続が完了したら、OpenOCDをCMSIS-DAPインターフェースを使用するように設定し、他のプローブと同様にデバッグセッションを開始できます。
Telnet経由でのOpenOCDとの対話
最新のIDEはデバッグ用のグラフィカルインターフェースを提供していますが、時にはより直接的で低レベルなデバッガーとの対話方法が必要になります。ここでTelnetが役立ちます。OpenOCDはTelnetサーバーを実行し、直接接続してテキストベースのコマンドを送信してターゲットチップを制御できます。これは、クイックチェック、自動化タスクのスクリプト作成、または完全なIDEが利用できない、または必要でない場合の問題のデバッグに非常に有用です。
Telnetクライアントの有効化
Telnetを使用する前に、オペレーティングシステムでTelnetを有効にする必要がある場合があります。デフォルトでは常にインストールまたは有効化されているわけではありません。
- Windows
- MacOS
- Linux
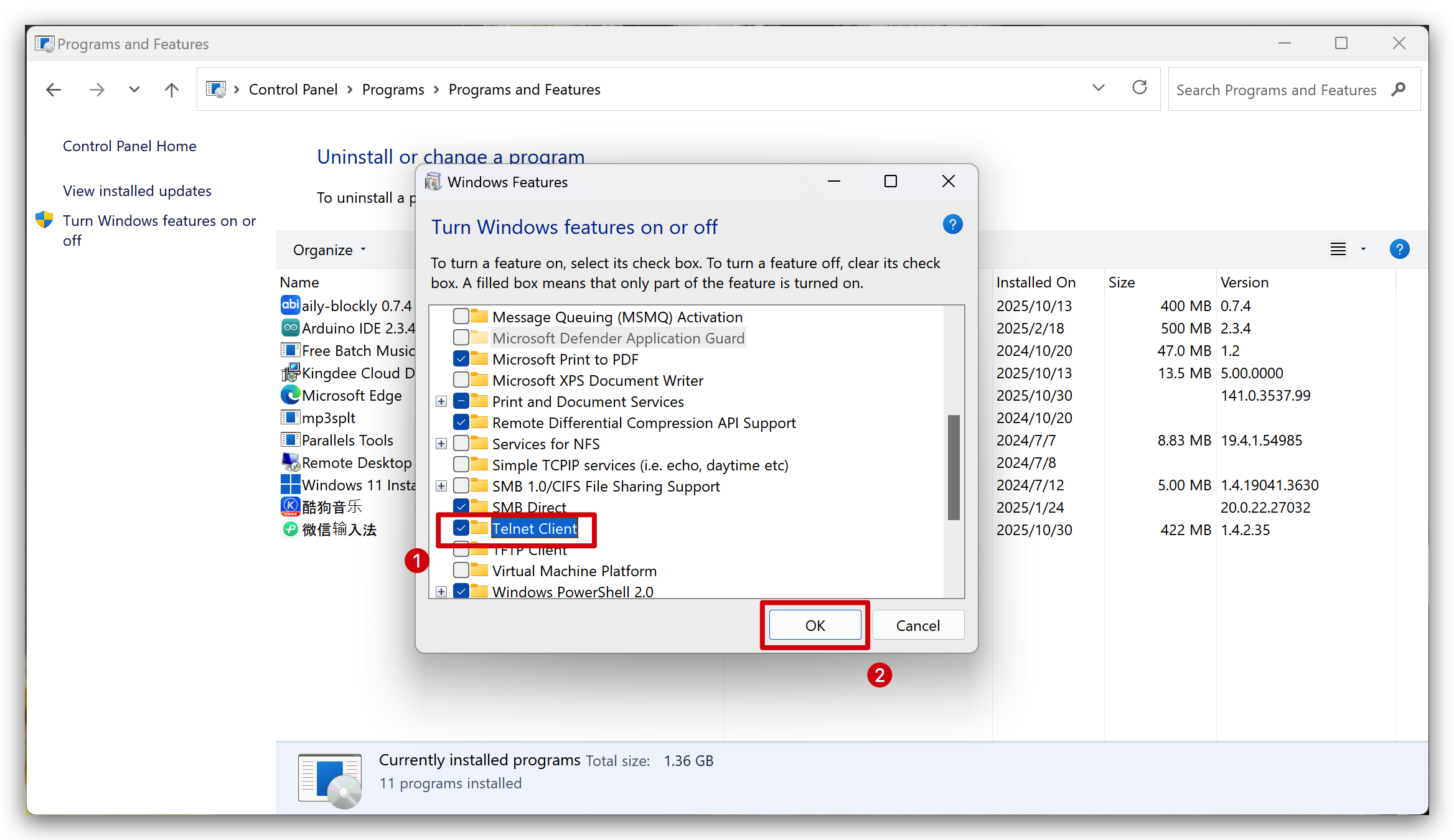
最新のWindowsシステムでは、Telnetクライアントは手動で有効にする必要があるレガシー機能です。
Win+Rを押して "Run" ダイアログを開き、control panelと入力してEnterを押します。- Programs > Programs and Featuresに移動します。
- 左側でTurn Windows features on or offをクリックします。
- 表示される新しいウィンドウで、下にスクロールしてTelnet Clientを見つけます。
- その横のボックスにチェックを入れてOKをクリックします。Windowsが機能をインストールします。
ネイティブのTelnetクライアントは、最新バージョンのmacOSでは削除されている可能性があります。インストールする最も簡単な方法は[Homebrew]を使用することです。ターミナルを開いて実行します:
brew install telnet
ほとんどのLinuxディストリビューションにはTelnetクライアントが付属しています。存在しない場合は、パッケージマネージャーを使用して簡単にインストールできます。Debian/Ubuntuベースのシステムの場合、ターミナルを開いて実行します:
sudo apt-get update
sudo apt-get install telnet
Telnetを使用したステップバイステップデバッグ
ステップ1:OpenOCDサーバーの実行
以下のリストからXIAOボードを見つけて、お使いのオペレーティングシステム向けの具体的な手順に従ってOpenOCDサーバーを開始します。このサーバープロセスは、GDBなどのデバッガーからの接続を待機します。
Seeed Studio XIAO SAMD21向け
標準のOpenOCDパッケージには、XIAO SAMD21用の設定ファイルが含まれていません。提供されたパッケージからシステムのOpenOCDインストールディレクトリに手動でコピーする必要があります。
1. 設定ファイルのコピー
-
ソースファイル:
XIAO_Debug_Mate_DAPLink_Packageから、ファイル:target/XIAO_SAMD21/at91samd21g18.cfgを見つけます。 -
宛先フォルダ: このファイルをxPack OpenOCDインストールの
targetスクリプトフォルダにコピーします。パスはOSによって異なります:- Windows:
C:\Users\YourName\AppData\Local\xPacks\OpenOCD\xpack-openocd-0.12.0-7\openocd\scripts\target\ - macOS / Linux:
~/opt/xpack-openocd-0.12.0-7/share/openocd/scripts/target/
- Windows:
YourNameとxpack-openocd-0.12.0-7を実際のユーザー名とインストールしたOpenOCDのバージョンに置き換えてください。
2. OpenOCDコマンドの実行
システム上の任意の場所で新しいターミナルを開き、対応するコマンドを実行します:
- Windows:
openocd.exe -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg - macOS / Linux:
openocd -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg
Seeed Studio XIAO RP2040向け
RP2040の設定は標準のxPack OpenOCDに含まれています。ターミナルを開いてコマンドを実行します。
- Windows:
openocd.exe -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000" - macOS / Linux:
openocd -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000"
Seeed Studio XIAO RP2350向け
RP2350の設定は標準のxPack OpenOCDに含まれています。ターミナルを開いてコマンドを実行します。
- Windows:
openocd.exe -f interface/cmsis-dap.cfg -f target/rp2350.cfg -c "adapter speed 5000" - macOS / Linux:
openocd -f interface/cmsis-dap.cfg -f target/rp2350.cfg -c "adapter speed 5000"
Seeed Studio XIAO nRF52840向け
nRF52の設定は標準のxPack OpenOCDに含まれています。ターミナルを開いてコマンドを実行します。
- Windows:
openocd.exe -f interface/cmsis-dap.cfg -f target/nrf52.cfg - macOS / Linux:
openocd -f interface/cmsis-dap.cfg -f target/nrf52.cfg
Seeed Studio XIAO RA4M1向け
SAMD21と同様に、標準のOpenOCDパッケージにはXIAO RA4M1用の設定ファイルが含まれていません。手動でコピーする必要があります。
1. 設定ファイルのコピー
-
ソースファイル:
XIAO_Debug_Mate_DAPLink_Packageから、ファイル:target/XIAO_RA4M1/ra4m1.cfgを見つけます。 -
宛先フォルダ: このファイルをxPack OpenOCDインストールの
targetスクリプトフォルダにコピーします。- Windows:
C:\Users\YourName\AppData\Local\xPacks\OpenOCD\xpack-openocd-0.12.0-7\openocd\scripts\target\ - macOS / Linux:
~/opt/xpack-openocd-0.12.0-7/share/openocd/scripts/target/
- Windows:
YourNameとxpack-openocd-0.12.0-7を実際のユーザー名とインストールしたOpenOCDのバージョンに置き換えてください。
2. OpenOCDコマンドの実行
システム上の任意の場所で新しいターミナルを開き、対応するコマンドを実行します:
- Windows:
openocd.exe -f interface/cmsis-dap.cfg -f target/ra4m1.cfg - macOS / Linux:
openocd -f interface/cmsis-dap.cfg -f target/ra4m1.cfg
Seeed Studio XIAO MG24向け
XIAO MG24には、XIAO_Debug_Mate_DAPLink_Packageに含まれている特別なバージョンのOpenOCDが必要です。システム全体のOpenOCDインストールを使用しないでください。パッケージで提供されている特定のディレクトリ内からコマンドを実行する必要があります。
1. ターミナルの準備
コマンドラインツールを開き、解凍されたパッケージ内のお使いのオペレーティングシステム用の正しいフォルダに移動します。
- Windows:
# Example if you unzipped it on your Desktop:
cd C:\Users\YourName\Desktop\XIAO_Debug_Mate_DAPLink_Package\XIAO_MG24_Win_OpenOCD-v0.12.0 - macOS / Linux:
# Example if you unzipped it on your Desktop:
cd ~/Desktop/XIAO_Debug_Mate_DAPLink_Package/XIAO_MG24_Mac_Linux_OpenOCD-v0.12.0
2. OpenOCDコマンドの実行
正しいディレクトリ内に入ったら、以下のコマンドを実行します:
- Windows:
bin\openocd.exe -s share/openocd/scripts -f interface/cmsis-dap.cfg -f target/efm32s2_g23.cfg -c "reset_config srst_nogate" - macOS / Linux:
bin/openocd -s share/openocd/scripts -f interface/cmsis-dap.cfg -f target/efm32s2_g23.cfg -c "reset_config srst_nogate"
コマンドの詳細
コマンドの各部分が何をするかを理解することで、問題のトラブルシューティングやワークフローのカスタマイズに役立ちます。典型的なコマンドを分解してみましょう:
bin/openocd -s share/openocd/scripts -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "..."
-
bin/openocd(またはbin\openocd.exe):これはOpenOCDプログラムを実行します。binサブディレクトリに配置されていることを前提としており、これは標準的な慣例です。名前と拡張子はOSによって異なります。 -
-s share/openocd/scripts:-sフラグは重要です。OpenOCDにスクリプトライブラリをsearch(検索)する場所を指示します。このパスが設定されると、OpenOCDは-fフラグで指定されたファイルを見つけることができます。 -
-f interface/cmsis-dap.cfg:-fフラグは読み込む設定fileを指定します。この最初のものは、使用しているデバッグアダプター(標準のCMSIS-DAPプローブ)を定義します。 -
-f target/rp2040.cfg:この2番目の-fフラグは、ターゲットマイクロコントローラー(XIAOボード上のRP2040チップ)の設定を読み込みます。 -
-c "...":-cフラグは、OpenOCDが開始した後にcommandを渡します。adapter speed 5000:(RP2040/RP2350向け)安定した通信のためにSWDクロック速度を5000 kHzに設定します。reset_config srst_nogate:(MG24向け)この特定のターゲットに必要な特別なリセット設定です。
これらのコマンドのいずれかを実行した後、OpenOCDは接続を初期化し、GDBなどのデバッガーが接続する(通常はポート3333)のを待機します。その後、デバッガーを使用してプログラムを読み込み(load <path/to/your/firmware.elf>)、ブレークポイントを設定し、コードをデバッグできます。
ステップ2:Telnetサーバーへの接続
次に、2番目の新しいコマンドプロンプトまたはターミナルウィンドウを開きます。以下のコマンドを入力してEnterを押します:
telnet localhost 4444
localhostはあなた自身のコンピューターを指します。4444はOpenOCDがTelnet接続に使用するデフォルトのポート番号です。
接続が成功すると、ターミナルにOpenOCDからのウェルカムメッセージが表示され、コマンドを受け付ける準備ができた>プロンプトが表示されます。
ステップ3:デバッグコマンドの実行
これで、Telnetセッションに直接コマンドを入力してターゲットチップを制御できます。最も一般的なコマンドをいくつか紹介します:
| コマンド | 説明 |
|---|---|
init | ターゲットの初期化。 チップへの接続を確立します。接続後に最初に実行すべきコマンドです。 |
reset halt | リセットと停止。 マイクロコントローラをリセットし、即座に実行を一時停止(停止)します。これはデバッグ準備状態に入る主要な方法です。 |
reg | レジスタ表示。 すべてのCPUレジスタの現在の値を表示します。 |
mdw [address] [count] | メモリ表示ワード。 メモリ内容を読み取り表示します。例えば、mdw 0x20000000 10はメモリアドレス0x20000000から10ワード(32ビット値)を表示します。 |
step | シングルステップ。 CPU上で単一の命令を実行します。命令が関数呼び出しの場合、関数内部にステップインします。 |
resume | 実行再開。 現在の状態からプログラムを自由に実行させます。ブレークポイント(設定されている場合)にヒットするか、再度停止するまで継続します。 |
exit | Telnet終了。 Telnet接続を閉じ、コマンドプロンプトに戻ります。他のウィンドウのOpenOCDサーバーは実行を継続します。 |
典型的な手動デバッグセッションは以下の手順に従います:
initと入力してチップに接続します。reset haltと入力してプログラムを最初の段階で停止します。mdw 0x20000000 10と入力してRAM値を検査します。stepを数回入力して初期スタートアップコードを順次実行します。resumeと入力してプログラムを正常に実行させます。- 完了したら
exitと入力します。
OpenOCD/PyOCDを使用したファームウェアのフラッシュ
インタラクティブデバッグに加えて、XIAO Debug Mateはコマンドラインツールを使用してXIAOのマイクロコントローラに直接ファームウェアをプログラミング(フラッシュ)することに優れています。主要なツールはOpenOCD(Open On-Chip Debugger)とPyOCDです。
このガイドでは、これらの強力なツールを使用してプリコンパイルされたファームウェアファイルをアップロードする方法を説明します。「OpenOCD/PyOCD」という表記を使用するのは、互換性のあるXIAOボードのほとんどがOpenOCDを使用する一方で、XIAO RA4M1は特にフラッシュにPyOCDを必要とするためです。
フラッシュ互換性
この表は、提供されたツールでコマンドラインフラッシュがサポートされているXIAOボードとファイルタイプをまとめています。
| XIAOモデル | .bin | .elf | .hex | ブートローダー |
|---|---|---|---|---|
| Seeed Studio XIAO SAMD21 | ✅ (OpenOCD) | ❌ | ✅ (OpenOCD) | ✅ (.binファイル、OpenOCD使用) |
| Seeed Studio XIAO RP2040 | ✅ (OpenOCD) | ✅ (OpenOCD) | ❌ | ❌ |
| Seeed Studio XIAO RP2350 | ✅ (OpenOCD) | ✅ (OpenOCD) | ❌ | ❌ |
| Seeed Studio XIAO nRF52840 | ✅ (OpenOCD) | ✅ (OpenOCD) | ✅ (OpenOCD) | ✅ (.hexファイル、OpenOCD使用) |
| Seeed Studio XIAO RA4M1 | ✅ (PyOCD) | ❌ | ✅ (PyOCD) | ✅ (.hexファイル、PyOCD使用) |
| Seeed Studio XIAO MG24 | ❌ | ❌ | ✅ (OpenOCD) | ❌ |
- この互換性表で❌が付いている項目は、OpenOCD v0.12.0でのテストに失敗したサンプルです。時間を節約するため、他のファームウェアファイルを使用してください。
- ブートローダーファイル:ここではXIAOブートローダーファイルとフラッシュコマンドのみを提供しています。このXIAOモデルがブートローダーファイルを同梱していない場合、❌でマークされます。
- XIAO RA4M1とXIAO MG24は
.elfファイルのフラッシュをサポートしていません。XIAO RA4M1またはXIAO MG24に.elfファイルをフラッシュしようとすると、デバイスがブリック状態になります。
前提条件
-
OpenOCDのインストール: XIAO MG24を除くすべてのXIAOボードについて、システムにOpenOCDをインストールし、コマンドラインからアクセス可能にする(つまり、システムのPATHに追加する)必要があります。
-
XIAO Debug Mateファームウェアパッケージ: カスタム設定ファイルとサンプルファームウェアを含むパッケージを準備しました。ダウンロードして展開してください。構造は以下の通りです:
examples/:様々なXIAOボード用のプリコンパイルされたサンプルファームウェア(.elf、.hex、.bin)といくつかのXIAOブートローダーファイルが含まれています。target/:XIAO SAMD21やRA4M1などの特定のボードに必要なカスタムOpenOCD設定ファイル(.cfg)が含まれています。XIAO_MG24_Mac_Linux_OpenOCD-v0.12.0/:macOSとLinux上でXIAO MG24をフラッシュするための自己完結型OpenOCD。XIAO_MG24_Win_OpenOCD-v0.12.0/:Windows上でXIAO MG24をフラッシュするための自己完結型OpenOCD。
-
ターミナル/コマンドプロンプト: コマンドラインインターフェース(例:Command Prompt、PowerShell、またはTerminal)を開いて使用することに慣れている必要があります。
コマンド実行戦略
-
オプションA(推奨):パッケージディレクトリから実行
このガイドのすべてのコマンドは、展開した
XIAO_Debug_Mate_DAPLink_Packageフォルダのルートでターミナルを開いていることを前提としています。これは最も簡単な方法で、ファームウェアと設定ファイルへの相対パスが直接機能します。 -
オプションB(上級者向け):任意のディレクトリから実行
独自のプロジェクトフォルダからコマンドを実行したい場合は、
-sフラグを使用してOpenOCDにパッケージのカスタムスクリプトの場所を指示できます。-
必要なアクション:
openocdコマンドに-s <パッケージフォルダへのパス>を追加します。例:# Replace <path_to_package_folder> with the actual path
openocd -s <path_to_package_folder> -f interface/cmsis-dap.cfg -f target/XIAO_SAMD21/at91samd21g18.cfg ...
-
WindowsとmacOS/Linux: すべてのコマンドにおいて、Windowsユーザーはopenocdの代わりにopenocd.exeを使用してください。クロスプラットフォーム互換性のため、ファイルパスにはフォワードスラッシュ(/)の使用を推奨します。
独自のカスタムファームウェアをフラッシュするには:
サンプルパス(例:examples/Blink_RP2040.elf)を独自のファームウェアファイルへのパスに置き換えるだけです。
ファームウェアファイルの理解(.bin、.hex、.elf)
プロジェクトをコンパイルすると、ツールチェーンはマイクロコントローラにアップロードするファイルを生成します。一般的に3つの形式があります:
- .bin(バイナリ): マシンコードのみを含む生の、コンパクトなバイナリファイル。メモリアドレスに関する追加情報がないため、プログラミングツールにどこに配置するかを指示する必要があります。
- .hex(Intel HEX): バイナリコードのASCIIテキスト表現。メモリアドレス、チェックサム、メタデータが含まれており、
.binよりも堅牢な形式です。 - .elf(Executable and Linkable Format): 最も包括的な形式。マシンコード、メモリアドレス情報に加えて、関数名、変数名、ソースコード行番号などのデバッグ情報も含まれています。これはデバッグに適した形式です。
- .bootloader(ブートローダーファイル): ブートローダーファイルは、マイクロコントローラのメモリの保護された領域に存在し、ファームウェアのフラッシュ、デバイスの復旧、起動タスクを促進する責任を持つ特殊なファームウェアイメージです。XIAOボードでは、ブートローダーにより専用のハードウェアプログラマーを必要とせずに新しいアプリケーションコードをデバイスに(多くの場合USB経由で)アップロードできます。デバイスが応答しなくなったり、メインプログラムが失敗した場合、ブートローダーを再フラッシュすることでボードを復旧できます。特定のボードモデル用の公式ブートローダーファイルのみを使用してください。間違ったファイルを使用すると、特殊なツールで修理するまでデバイスが動作不能になる可能性があります。
プロジェクトからこれらのファイルを取得する方法:
- Arduino IDE: コンパイル後(
Sketch > Verify/Compile)、Sketch > Export compiled Binaryを使用します。これによりスケッチフォルダに.hexまたは.binファイルが保存されます。 - PlatformIO: ビルド成功後、ファームウェアファイル(
firmware.bin、firmware.hex、firmware.elf)はプロジェクトの.pio/build/<environment_name>/ディレクトリにあります。
.binファイルのフラッシュ
Seeed Studio XIAO SAMD21の場合
標準のOpenOCDパッケージにはXIAO SAMD21用の設定ファイルが含まれていません。提供されたパッケージからシステムのOpenOCDインストールディレクトリに手動でコピーする必要があります。
1. 設定ファイルのコピー
-
ソースファイル:
XIAO_Debug_Mate_DAPLink_Packageから、ファイルtarget/XIAO_SAMD21/at91samd21g18.cfgを見つけます。 -
コピー先フォルダ: このファイルをxPack OpenOCDインストールの
targetスクリプトフォルダにコピーします。パスはOSによって異なります:- Windows:
C:\Users\YourName\AppData\Local\xPacks\OpenOCD\xpack-openocd-0.12.0-7\openocd\scripts\target\ - macOS / Linux:
~/opt/xpack-openocd-0.12.0-7/share/openocd/scripts/target/
- Windows:
YourNameとxpack-openocd-0.12.0-7を実際のユーザー名とインストールしたOpenOCDのバージョンに置き換えてください。
2. ファームウェアのフラッシュ
システム上の任意の場所で新しいターミナルを開き、対応するコマンドを実行します:
-
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg -c "telnet_port disabled; init; targets; halt; program examples/Blink_SAMD21.bin 0x00002000 verify reset; shutdown" -
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg -c "telnet_port disabled; init; targets; halt; program examples/Blink_SAMD21.bin 0x00002000 verify reset; shutdown"
Seeed Studio XIAO RP2040 の場合
OpenOCD を使用して XIAO RP2040 にフラッシュする際は、.bin ファイルではなく .elf ファイルを使用することを強く推奨します。
これは、.elf ファイルには既にプログラムのメモリアドレス情報(リンカアドレス)が内部に含まれているためです。OpenOCD は自動的に正しい場所(通常は 0x10000000)に書き込むため、オフセットアドレスを手動で計算したり推測したりする必要がありません。
.bin ファイルを使用する必要がある場合は、XIAO RP2040 の Flash 開始アドレス 0x10000000 を手動で指定する必要があります。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2040.bin 0x10000000 verify reset exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2040.bin 0x10000000 verify reset exit"
Seeed Studio XIAO RP2350 の場合
OpenOCD を使用して XIAO RP2350 にフラッシュする際は、.bin ファイルではなく .elf ファイルを使用することを強く推奨します。
これは、.elf ファイルには既にプログラムのメモリアドレス情報(リンカアドレス)が内部に含まれているためです。OpenOCD は自動的に正しい場所(通常は 0x10000000)に書き込むため、オフセットアドレスを手動で計算したり推測したりする必要がありません。
.bin ファイルを使用する必要がある場合は、XIAO RP2350 の Flash 開始アドレス 0x10000000 を手動で指定する必要があります。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/rp2350.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2350.bin 0x10000000 verify reset exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/rp2350.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2350.bin 0x10000000 verify reset exit"
Seeed Studio XIAO nRF52840 の場合
nRF52 の設定は標準の xPack OpenOCD に含まれています。ターミナルを開いてコマンドを実行してください。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "program examples/Blink_nRF52840.bin 0x27000 verify reset exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "program examples/Blink_nRF52840.bin 0x27000 verify reset exit"
Seeed Studio XIAO RA4M1 の場合
現在、標準的な OpenOCD ディストリビューションには、専用ドライバやターゲット設定ファイルなど、Renesas RA シリーズの組み込みサポートが不足していることがよくあります。これにより、OpenOCD を使用したフラッシュは手動設定が必要な複雑なプロセスになります。
そのため、RA4M1 に対してすぐに使えるサポートを提供する PyOCD の使用を強く推奨します。
ファームウェア(例:Blink_RA4M1.hex)をフラッシュするには、お使いのオペレーティングシステムに対応するコマンドを使用してください。
Windows の場合:
pyocd flash -t r7fa4m1ab examples\Blink_RA4M1.bin —base-address 0x4000
macOS / Linux の場合:
pyocd flash -t r7fa4m1ab examples/Blink_RA4M1.bin —base-address 0x4000
.elf ファイルのフラッシュ
.elf ファイルをフラッシュする際は、ファームウェアのサイズに十分注意してください。ファイルが 2MB を超える場合は、デバイスに十分な Flash ストレージ容量があることを確認してください。これを怠ると、デバイスが使用不能になる可能性があります!
Seeed Studio XIAO SAMD21 の場合
XIAO SAMD21 の Flash メモリは 256KB と限られているため、通常 256KB を超えるファームウェアファイルを書き込むことはできません。Blink サンプルの .elf ファイルは既に 658KB に達しており、書き込み不可能です。代わりに、より小さな .bin または .hex ファイルの使用を推奨します。
Seeed Studio XIAO RP2040 の場合
RP2040 の設定は標準の xPack OpenOCD に含まれています。ターミナルを開いてコマンドを実行してください。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2040.elf verify reset exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/rp2040.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2040.elf verify reset exit"
Seeed Studio XIAO RP2350 の場合
RP2350 の設定は標準の xPack OpenOCD に含まれています。ターミナルを開いてコマンドを実行してください。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/rp2350.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2350.elf verify reset exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/rp2350.cfg -c "adapter speed 5000" -c "program examples/Blink_RP2350.elf verify reset exit"
Seeed Studio XIAO nRF52840 の場合
nRF52 の設定は標準の xPack OpenOCD に含まれています。ターミナルを開いてコマンドを実行してください。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "program examples/Blink_nRF52840.elf verify reset exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "program examples/Blink_nRF52840.elf verify reset exit"
ファームウェアを有効にするために 2 回フラッシュする必要がある場合があります。これは正常な動作です。
Seeed Studio XIAO RA4M1 の場合
XIAO RA4M1 では .elf ファイルのフラッシュは禁止されています。これを行うとデバイスが使用不能になる可能性があります!!!
Seeed Studio XIAO MG24 の場合
XIAO MG24 では .elf ファイルのフラッシュは禁止されています。これを行うとデバイスが使用不能になる可能性があります!!!
.hex ファイルのフラッシュ
Seeed Studio XIAO SAMD21 の場合
標準の OpenOCD パッケージには XIAO SAMD21 の設定ファイルが含まれていません。提供されたパッケージからシステムの OpenOCD インストールディレクトリに手動でコピーする必要があります。
1. 設定ファイルをコピー
-
ソースファイル:
XIAO_Debug_Mate_DAPLink_Packageから、ファイルtarget/XIAO_SAMD21/at91samd21g18.cfgを見つけます。 -
コピー先フォルダ: このファイルを xPack OpenOCD インストールの
targetスクリプトフォルダにコピーします。パスは OS によって異なります:- Windows:
C:\Users\YourName\AppData\Local\xPacks\OpenOCD\xpack-openocd-0.12.0-7\openocd\scripts\target\ - macOS / Linux:
~/opt/xpack-openocd-0.12.0-7/share/openocd/scripts/target/
- Windows:
YourName と xpack-openocd-0.12.0-7 を実際のユーザー名とインストールした OpenOCD のバージョンに置き換えてください。
2. ファームウェアをフラッシュ
システム上の任意の場所で新しいターミナルを開き、対応するコマンドを実行します:
-
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg -c "telnet_port disabled; init; targets; halt; program examples/Blink_SAMD21.hex verify reset; shutdown" -
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg -c "telnet_port disabled; init; targets; halt; program examples/Blink_SAMD21.hex verify reset; shutdown"
Seeed Studio XIAO nRF52840 の場合
nRF52 の設定は標準の xPack OpenOCD に含まれています。ターミナルを開いてコマンドを実行してください。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "program examples/Blink_nRF52840.hex verify reset exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "program examples/Blink_nRF52840.hex verify reset exit"
Seeed Studio XIAO RA4M1 の場合
現在、標準的な OpenOCD ディストリビューションには、専用ドライバやターゲット設定ファイルなど、Renesas RA シリーズの組み込みサポートが不足していることがよくあります。これにより、OpenOCD を使用したフラッシュは手動設定が必要な複雑なプロセスになります。
そのため、RA4M1 に対してすぐに使えるサポートを提供する PyOCD の使用を強く推奨します。
ファームウェア(例:Blink_RA4M1.hex)をフラッシュするには、お使いのオペレーティングシステムに対応するコマンドを使用してください。
Windows の場合:
pyocd flash -e sector -a 0x0 -t r7fa4m1ab examples\Blink_RA4M1.hex
macOS / Linux の場合:
pyocd flash -e sector -a 0x0 -t r7fa4m1ab examples/Blink_RA4M1.hex
コマンドの説明:
pyocd flash:フラッシュ操作を実行します。-e sector:プログラミング前にフラッシュメモリの必要なセクタを消去します。-a 0x0:フラッシュの開始アドレスを指定します。これは0x00000000です。-t r7fa4m1ab:ターゲット MCU タイプを指定します。examples\Blink_RA4M1.hexまたはexamples/Blink_RA4M1.hex:フラッシュしたいファームウェアファイルのパスです。Windows では\、macOS/Linux では/を使用することに注意してください。
Seeed Studio XIAO MG24 の場合
このボードには、パッケージからの専用 OpenOCD バージョンが必要です。コマンドを実行する前に、正しいディレクトリに移動する必要があります。
-
正しいディレクトリに移動:
- Windows の場合: コマンドプロンプトを開いて実行:
cd XIAO_MG24_Win_OpenOCD-v0.12.0 - macOS/Linux の場合: ターミナルを開いて実行:
cd XIAO_MG24_Mac_Linux_OpenOCD-v0.12.0
- Windows の場合: コマンドプロンプトを開いて実行:
-
フラッシュコマンドを実行: パッケージディレクトリの 2 階層下にいるため、ファームウェアへのパスは
../examples/Blink_MG24.hexになります。Windows の場合:
bin\openocd.exe -f interface/cmsis-dap.cfg -f target/efm32s2_g23.cfg -c "init; reset_config srst_nogate; reset halt; program ../examples/Blink_MG24.hex; reset; exit"macOS / Linux の場合:
bin/openocd -f interface/cmsis-dap.cfg -f target/efm32s2_g23.cfg -c "init; reset_config srst_nogate; reset halt; program ../examples/Blink_MG24.hex; reset; exit"
ブートローダーファイルのフラッシュ
これは、ボードを復旧できる重要な操作です。
Seeed Studio XIAO SAMD21 の場合
標準の OpenOCD パッケージには XIAO SAMD21 の設定ファイルが含まれていません。提供されたパッケージからシステムの OpenOCD インストールディレクトリに手動でコピーする必要があります。
1. 設定ファイルをコピー
-
ソースファイル:
XIAO_Debug_Mate_DAPLink_Packageから、ファイルtarget/XIAO_SAMD21/at91samd21g18.cfgを見つけます。 -
コピー先フォルダ: このファイルを xPack OpenOCD インストールの
targetスクリプトフォルダにコピーします。パスは OS によって異なります:- Windows:
C:\Users\YourName\AppData\Local\xPacks\OpenOCD\xpack-openocd-0.12.0-7\openocd\scripts\target\ - macOS / Linux:
~/opt/xpack-openocd-0.12.0-7/share/openocd/scripts/target/
- Windows:
YourName と xpack-openocd-0.12.0-7 を実際のユーザー名とインストールした OpenOCD のバージョンに置き換えてください。
2. ファームウェアをフラッシュ
このコマンドは、パッケージで提供されたカスタム at91samd21g18.cfg ファイルを使用して .bin ブートローダーをフラッシュします。
- Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg -c "telnet_port disabled; init; targets; halt; program examples/Bootloader_SAMD21.bin verify reset; shutdown"
- macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/at91samd21g18.cfg -c "telnet_port disabled; init; targets; halt; program examples/Bootloader_SAMD21.bin verify reset; shutdown"
Seeed Studio XIAO nRF52840 の場合
このプロセスでは、ブートローダーをダウンロードし、チップを消去して新しいファイルをフラッシュします。
このコマンドは、OpenOCD インストールの標準 nrf52.cfg を使用します。
Windows の場合:
openocd.exe -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "init" -c "halt" -c "nrf5 mass_erase" -c "program examples/Bootloader_nRF52840-0.6.1.hex verify" -c "reset" -c "exit"
macOS / Linux の場合:
openocd -f interface/cmsis-dap.cfg -f target/nrf52.cfg -c "init" -c "halt" -c "nrf5 mass_erase" -c "program examples/Bootloader_nRF52840-0.6.1.hex verify" -c "reset" -c "exit"
OpenOCD を使用してブートローダーを書き込み、その後ファームウェア bin を書き込んだ後、ファームウェア bin が正常に動作しません。プログラムを正常に動作させるには、Arduino を使用してプログラムをアップロードする必要があります。
これは、Nordic シリーズチップ(nRF52832 など)のブートローダーが起動時に特定のメモリアドレス(通常「Bootloader Settings Page」と呼ばれる)でアプリケーションファームウェアの有効性情報をチェックする必要があるためです。この「設定ページ」には、ファームウェアの CRC チェックサム、長さ、有効性フラグが含まれています。
OpenOCD などの汎用プログラミングツールを使用して .bin ファイルを直接書き込む場合、指定されたアプリケーション開始アドレスにファームウェアのバイナリデータのみを書き込み、ブートローダーが必要とする「設定ページ」を自動的に生成または書き込みません。そのため、デバイスが再起動すると、ブートローダーは有効な設定ページを検出できず、正当なアプリケーションがないと判断し、ファームウェアの起動を拒否して通常 DFU(Device Firmware Update)モードに入り、OTA またはシリアルポート経由での更新を待機します。
Seeed Studio XIAO RA4M1 の場合
現在、標準の OpenOCD ディストリビューションには、専用ドライバーやターゲット設定ファイルなど、Renesas RA シリーズの組み込みサポートが不足していることがよくあります。これにより、フラッシュに OpenOCD を使用することは手動設定が必要な複雑なプロセスになります。
そのため、RA4M1 のすぐに使えるサポートを提供する PyOCD の使用を強く推奨します。
ブートローダーをフラッシュするには、お使いのオペレーティングシステムに対応するコマンドを使用してください。
Windows の場合:
pyocd flash -t r7fa4m1ab examples\Bootloader_RA4M1.hex —erase chip
macOS / Linux の場合:
pyocd flash -t r7fa4m1ab examples/Bootloader_RA4M1.hex —erase chip
PlatformIO でのデバッグの使用
まず、Visual Studio Code に PlatformIO IDE 拡張機能がインストールされていることを確認してください。
- VS Code をインストール:Visual Studio Code をダウンロードしてインストールします。
- PlatformIO IDE をインストール:VS Code を開き、拡張機能ビュー(Ctrl+Shift+X)に移動し、
PlatformIO IDEを検索してインストールします。
PlatformIO プロジェクトの作成と設定
- PlatformIO を起動:VS Code のアクティビティバーで PlatformIO アイコンをクリックし、「Home」を選択して PIO ホーム画面を開きます。
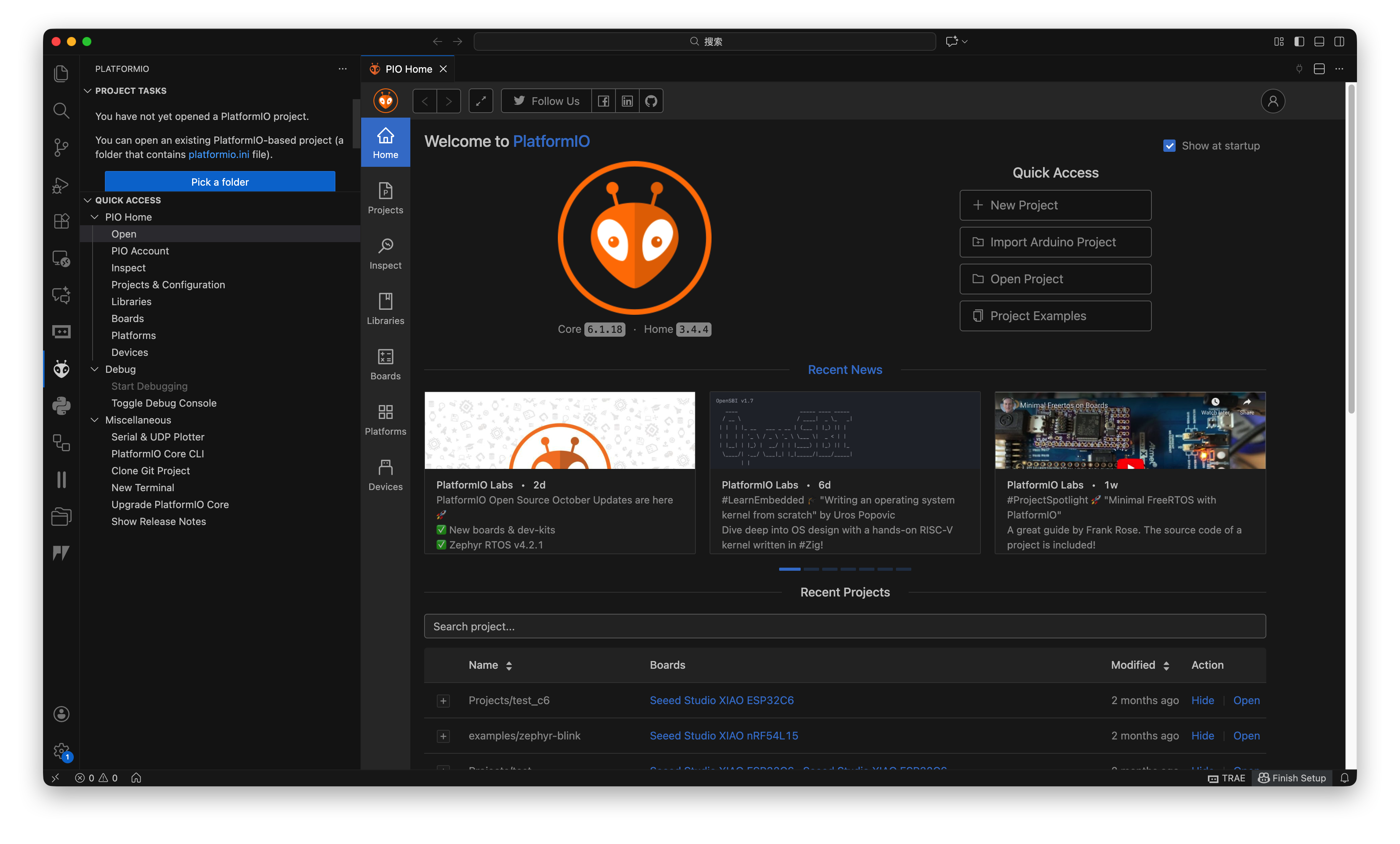
- 新しいプロジェクトを作成:「New Project」をクリックしてプロジェクトに名前を付けます。
- ボードを選択:使用する予定の特定の XIAO ボードを検索します。
Seeed Studio ボードはサードパーティリポジトリでホストされているため、特定のボードがデフォルトで検索リストに表示されない場合があります。この場合、汎用ボード(または利用可能な任意のボード)を選択してプロジェクトを初期化し、次のステップで修正します。
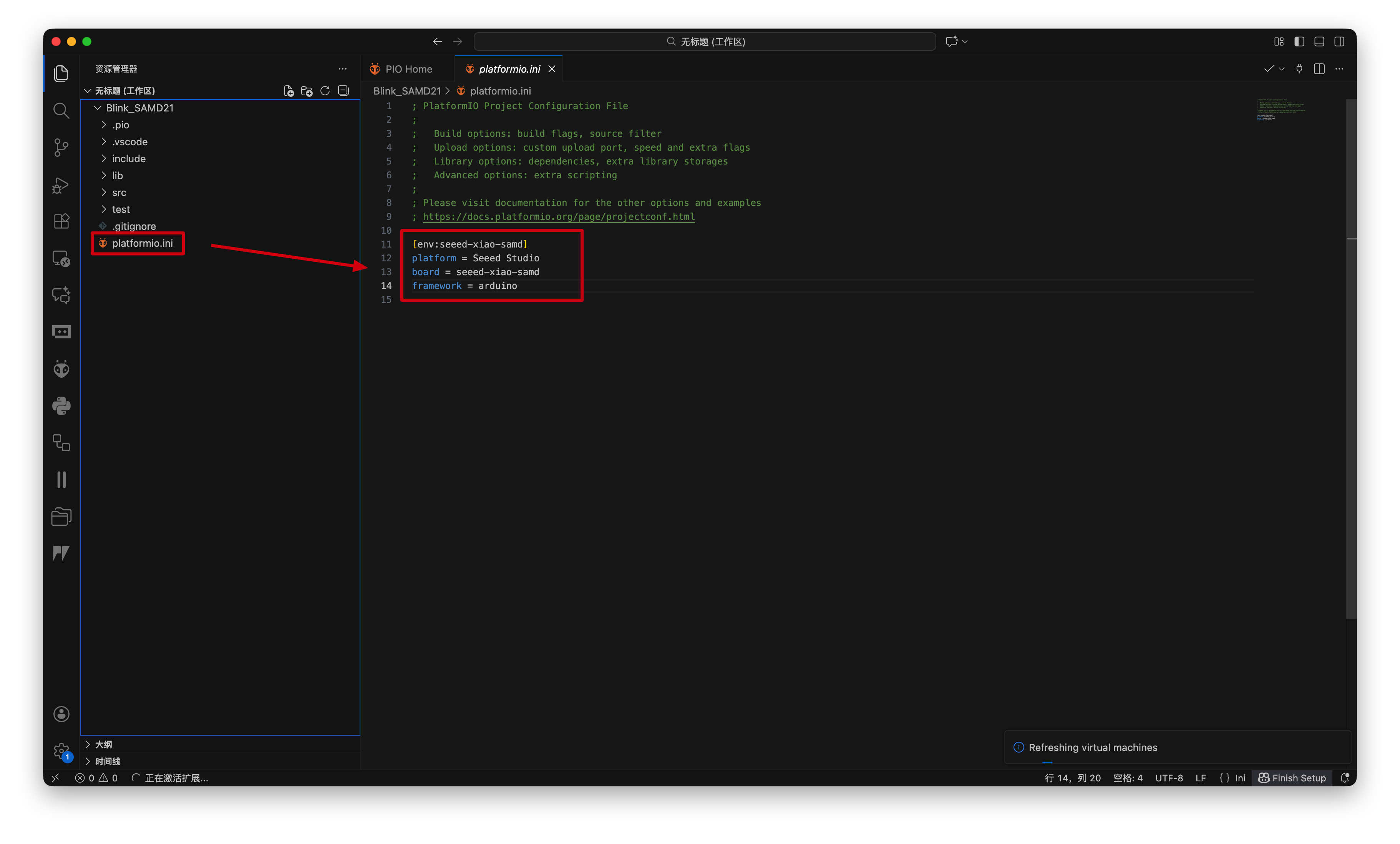
-
platformio.iniを設定:これが最も重要なステップです。XIAO Debug Mate でのデバッグを有効にし、ボードを正しく認識させるには、プロジェクトのルートにあるplatformio.iniファイルを変更する必要があります。Seeed Studio ボードサポートの追加: Seeed Studio 開発ボードはデフォルトの PlatformIO レジストリに含まれていませんが、サードパーティリポジトリで維持されています。これらを使用するには、設定でリポジトリ URL を指定する必要があります。
platformパラメータを次の URL に設定する必要があります:https://github.com/Seeed-Studio/platform-seeedboards設定ファイルは、このカスタムリポジトリからボード定義をダウンロードし、アップロードとデバッグに使用するツールを指定するよう PlatformIO に指示します。XIAO Debug Mate は標準の CMSIS-DAP デバッガーとして機能します。
以下は、さまざまな XIAO モデルの推奨 platformio.ini 設定です。お使いのボードに対応する内容をコピーしてください。最新のボードサポートファイルを確実に入手するため、GitHub からプラットフォームの開発版を使用しています。
- XIAO RP2350
- XIAO RP2040
- XIAO SAMD21
- XIAO nRF52840
- XIAO RA4M1
- XIAO MG24
[env:seeed_xiao_rp2350]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
board = seeed-xiao-rp2350
framework = arduino
upload_protocol = cmsis-dap
debug_tool = cmsis-dap
[env:seeed_xiao_rp2040]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
board = seeed-xiao-rp2040
framework = arduino
upload_protocol = cmsis-dap
debug_tool = cmsis-dap
[env:seeed-xiao-samd]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
board = seeed-xiao-samd
framework = arduino
upload_protocol = cmsis-dap
debug_tool = cmsis-dap
nRF52840 の場合、PlatformIO は 2 つのボードサポートパッケージを提供しています。プロジェクトの要件に合うものを選択してください。
Mbed Core:
[env:seeed-xiao-mbed-nrf52840]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
board = seeed-xiao-mbed-nrf52840
framework = arduino
upload_protocol = cmsis-dap
debug_tool = cmsis-dap
Adafruit Core:
[env:seeed-xiao-afruitnrf52-nrf52840]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
board = seeed-xiao-afruitnrf52-nrf52840
framework = arduino
upload_protocol = cmsis-dap
debug_tool = cmsis-dap
RA4M1 は特別なケースであることに注意してください。アップロードには pyocd を使用しますが、デバッグには依然として cmsis-dap を使用します。
[env:seeed-xiao-ra4m1]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
board = seeed-xiao-ra4m1
framework = arduino
upload_protocol = pyocd
debug_tool = cmsis-dap
[env:seeed-xiao-mg24]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
board = seeed-xiao-mg24
framework = arduino
upload_protocol = cmsis-dap
debug_tool = cmsis-dap
platformio.ini ファイルを保存した後、次回ビルドまたはデバッグ時に PlatformIO が必要なツールチェーンとパッケージをすべて自動的にダウンロードします。
ステップバイステップデバッグ
ステップバイステップ実行は、コードのロジックを追跡し、バグを特定するためのコア機能です。
- ハードウェアを接続:XIAO ボードを XIAO Debug Mate に接続します。Debug Mate を USB-C ケーブルでコンピュータに接続します。
- デバッグを開始:デバッグセッションは 2 つの方法で開始できます:
F5キーを押します。- 「Run and Debug」ビュー(アクティビティバーのバグアイコン)に移動し、上部の緑色の「Start Debugging」矢印をクリックします。
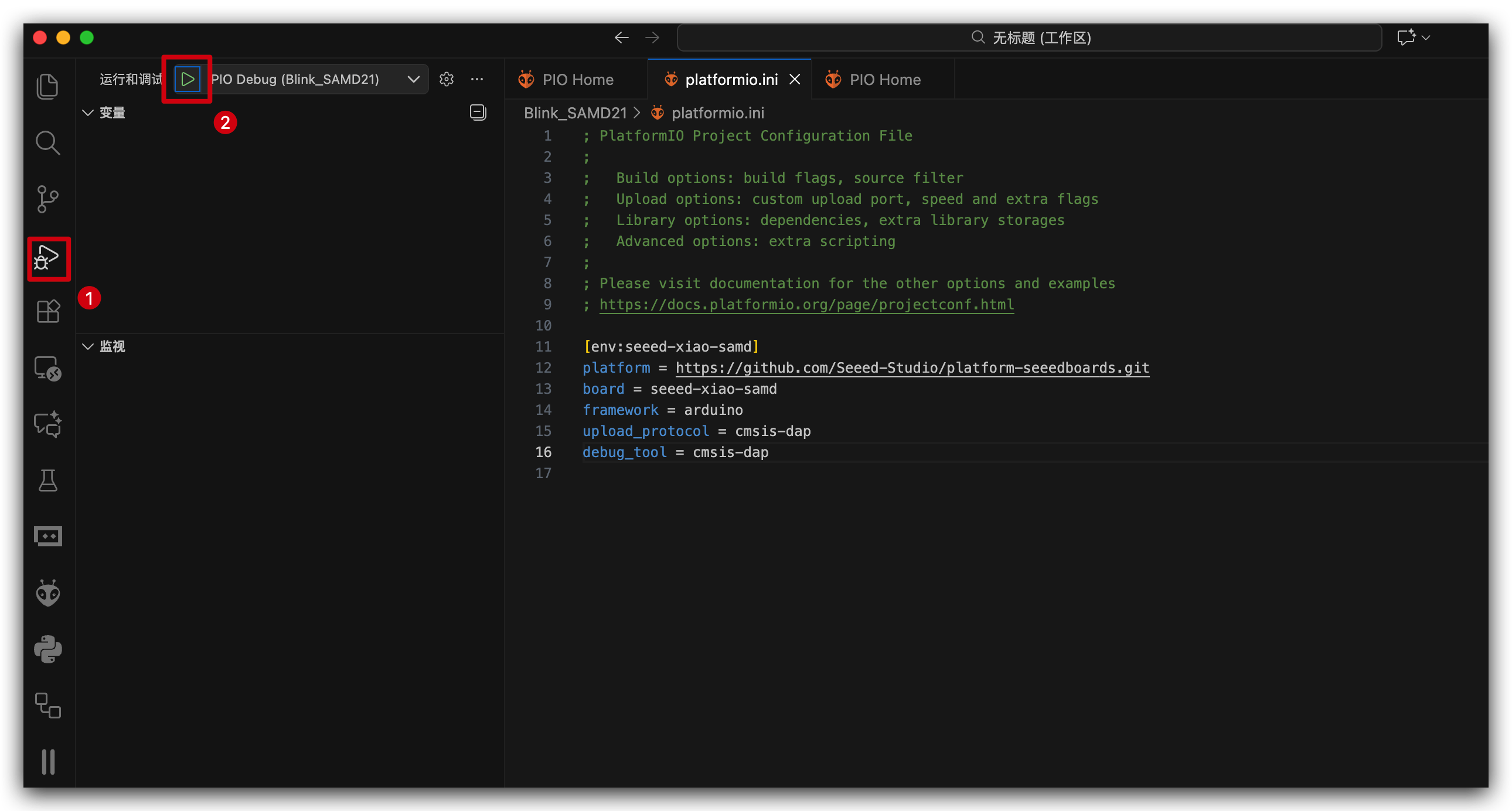
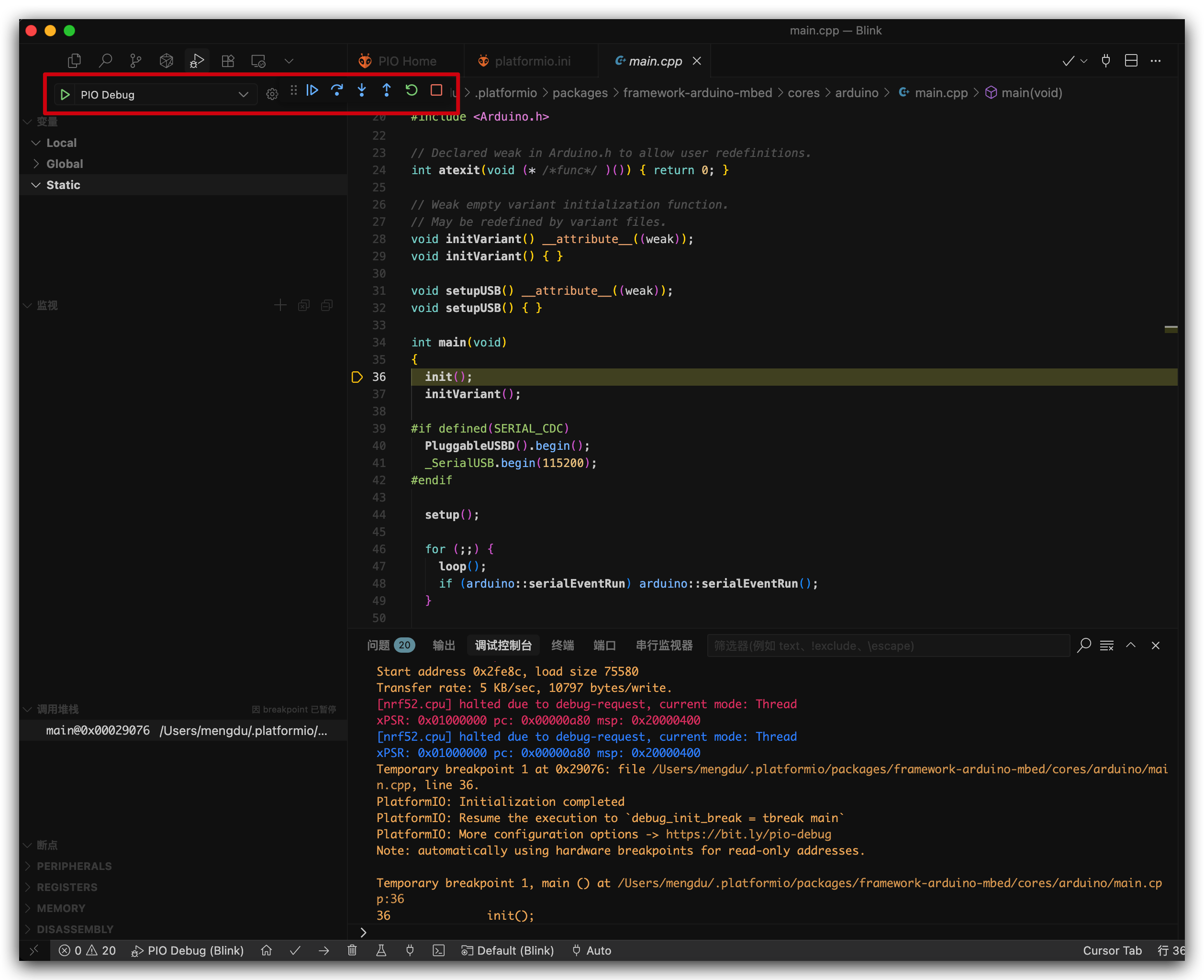
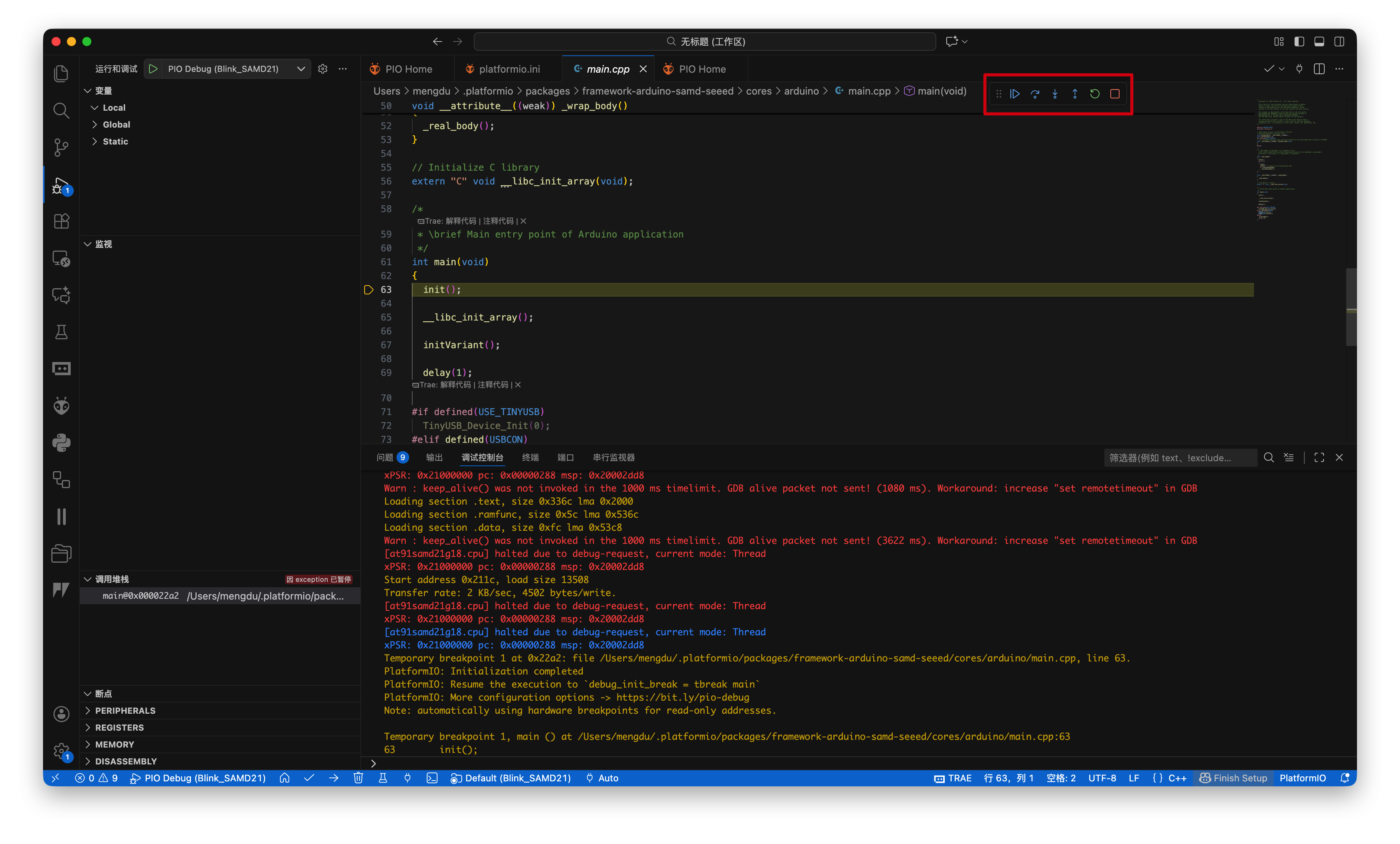
- デバッグコントロール:PlatformIO がコードをコンパイルし、Debug Mate 経由で XIAO にアップロードし、
main()またはsetup()の最初の行で実行を一時停止します。エディタの上部にデバッグツールバーが表示され、プログラムフローを制御できます:- Continue(F5):次のブレークポイントにヒットするかプログラムが終了するまで実行を再開します。
- Step Over(F10):現在の行を実行します。行に関数呼び出しが含まれている場合、関数全体を実行して次の行で停止します。
- Step Into(F11):現在の行を実行します。行に関数呼び出しが含まれている場合、デバッガーは関数に入り、その最初の行で停止します。
- Step Out(Shift+F11):関数内で一時停止している場合、関数の残りの部分を実行し、呼び出された行に戻ります。
- Restart (Ctrl+Shift+F5): 現在のデバッグセッションを終了して再開します。
- Stop (Shift+F5): デバッグセッションを終了します。
ブレークポイントデバッグ
プログラムを特定の場所で一時停止させたい場合は、ブレークポイントが適切なツールです。
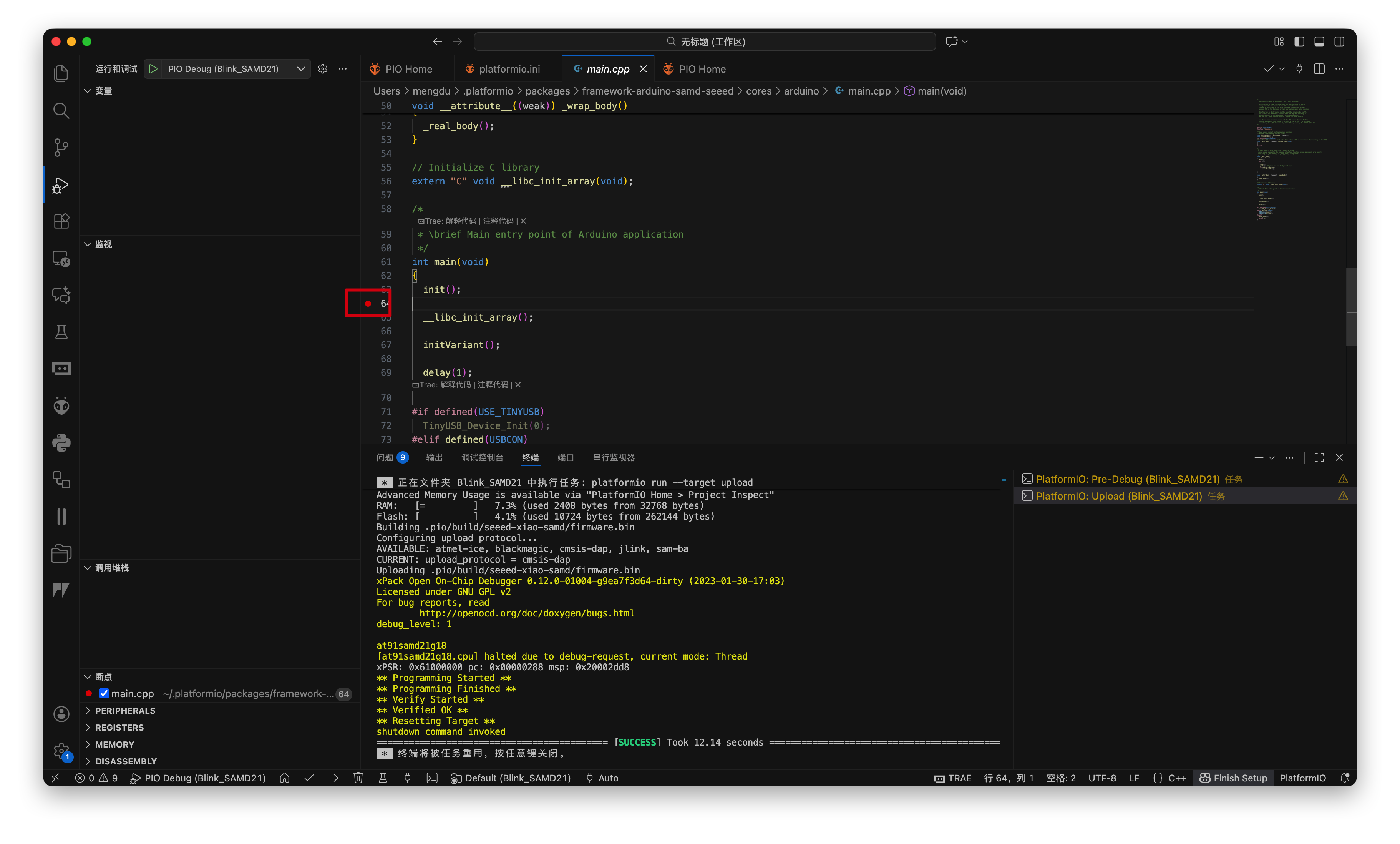
- ブレークポイントの設定: コードエディタで、一時停止させたい行番号の左側にカーソルを移動します。薄い赤い点が表示されます。それをクリックしてブレークポイントを設定します(点が明るい赤色になります)。
- ブレークポイントまで実行: デバッグセッションを開始します(
F5)。プログラムはフルスピードで実行され、ブレークポイントが設定された行に到達すると自動的に一時停止します。 - ブレークポイントの管理: "Run and Debug" サイドパネルの "BREAKPOINTS" セクションには、すべてのアクティブなブレークポイントが一覧表示されます。ここから有効化、無効化、または削除できます。
RAM読み取り/書き込み
プログラムがブレークポイントで一時停止している間、変数の状態を検査し、さらには変更することができます。
- 変数の表示(読み取り): "Run and Debug" サイドパネルの "VARIABLES" セクションには、現在のスコープ内のすべてのローカル変数とグローバル変数、およびそれらの現在の値が表示されます。
- 変数の監視: 特定の変数や式を監視したい場合は、"WATCH" セクションに移動し、
+アイコンをクリックして変数名を入力します(例:myVariableまたは&myVariableでメモリアドレスを確認)。
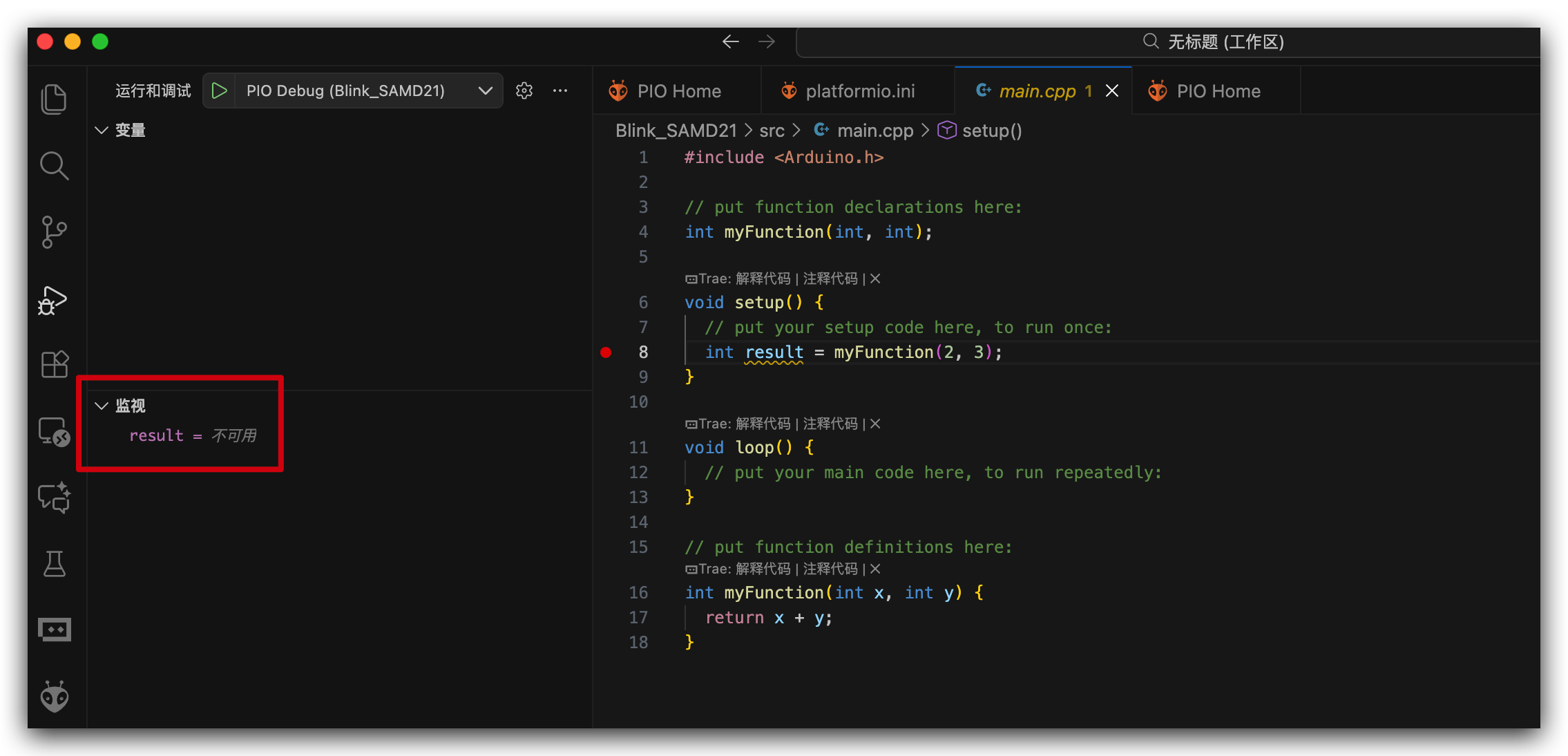
- 変数の変更(書き込み): "VARIABLES" または "WATCH" セクションで、変数の値をダブルクリックして新しい値を入力できることがよくあります。Enterキーを押して変更を適用します。これは、プログラムを再起動することなく異なる条件をテストするのに非常に便利です。
トラブルシューティング
Q1: XIAO RA4M1をブリックしてしまった場合、修復する方法はありますか?
ブートローダーを再フラッシュしてデバイスを復元することを試すことができます。XIAO RA4M1モデルについては、ブートローダー復旧のために**この方法**を参照してください。
ブートローダーを復元する際にエラーが発生した場合は、XIAO RA4M1をコンピュータに接続されたXIAO Debug Mateに接続してみてください。XIAO RA4M1のBボタンを押し続けながら、同時にRボタンを一度クリックし、その後RとBの両方を離します。その後、ブートローダーを再度フラッシュしてください。
ブートローダーをフラッシュした後、Arduinoなどのソフトウェアを使用してファームウェアの再更新を試みてください。これにより通常は機能が復元されます。成功しない場合、デバイスは永続的に損傷し、修復不可能である可能性があります。XIAO Debug Mateを使用したファームウェアフラッシュに関するすべての操作は、完全に自己責任で行う必要があります。
Q2: デバイスがブリックされているかどうかはどのように判断できますか?
XIAOデバイスが損傷しているかどうかを判断する最も簡単な方法は、コンピュータに接続してもシリアルポート接続が表示されないことです。Bボタンを押し続けてからコンピュータに接続してもデバイスがシリアルポート接続を表示しない場合、デバイスは損傷しています。
Q3: 損傷した機器は修理できますか?技術サポートに連絡して交換を依頼できますか?
XIAOデバイスの損傷は通常、パーティション分割やブートローダーファイルの問題によって引き起こされます。これは通常、ブートローダーファイルを再フラッシュすることで解決できます。これが失敗した場合、現在のところ代替解決策はありません。ユーザーはこの操作を自分で実行することに対して完全に責任を負う必要があるため、フラッシュコマンドとファームウェアが検証済みで有効であることを確認してください。
Q4: XIAO Debug Mateにはドライバーが必要ですか?
XIAO Debug Mateは最新のコンピュータオペレーティングシステムでテストおよび検証されており、ドライバーのインストールを必要とせずに正常に機能します。Windowsコンピュータの場合、Windows 11オペレーティングシステムの使用を推奨します。テスト中に、Zadingを使用してドライバーをインストールした場合、デバイスが認識されない可能性があることが判明しました。
Q5: Windows 11でXIAO Debug Mateが常に赤いライトを表示し、認識されず、「unable to find a matching CMSIS-DAP device」というエラーが報告されます。
Windows 11でXIAO Debug Mateが赤いライトを表示し、「unable to find a matching CMSIS-DAP device」と報告される問題について、以下のトラブルシューティング手順を試してください:
1. USBケーブルの確認
まず、使用しているUSBケーブルがデータ転送をサポートしており、単なる充電ケーブルではないことを確認してください。これは、デバイスがシリアルモニターソフトウェアに表示されるか、またはデバイスログが確認できるかをチェックすることで確認できます。接続時にコンピュータが全く反応しない場合は、ケーブルを交換してみてください。
2. PowerShellを使用したドライバーの再インストール
ケーブルが正常に動作することが確認された場合、問題は不正なドライバーインストールによって引き起こされている可能性があります。PowerShellを使用して競合するドライバーを削除することで解決できます。以下の手順に従ってください:
-
スタートボタンを右クリックし、Terminal (Admin) または PowerShell (Admin) を選択します。
-
以下のコマンドを実行してCMSIS-DAPドライバーの詳細を確認します:
dism /online /get-drivers /format:table | findstr /i "cmsis-dap" -
出力で**「Published Name」**(通常は
oemXX.infのような形式)を探します。 -
以下のコマンドを実行してドライバーを削除およびアンインストールします(
{inf_name}を前の手順で見つけた実際の名前、例:oem10.infに置き換えてください):pnputil /delete-driver {inf_name} /uninstall
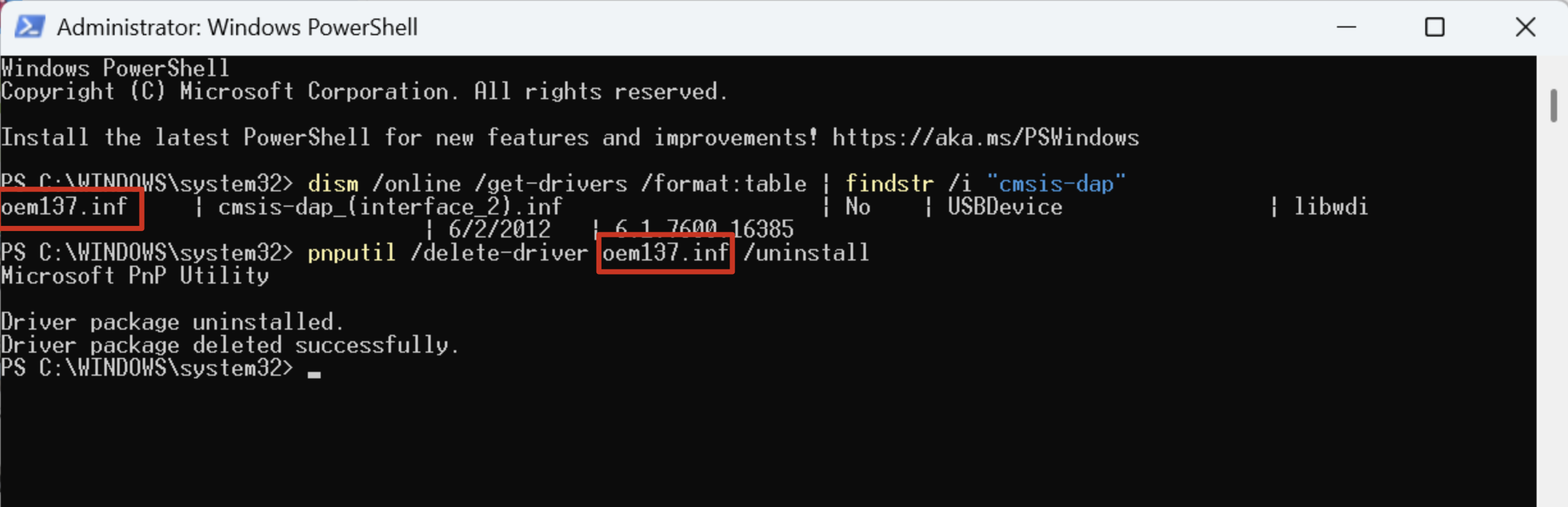
これらの手順を完了した後、デバイスを再接続し、正しく認識されるかどうかを確認してください。
Q6: システムに表示されるOpenOCDバージョンがWikiのスクリーンショットと異なる場合はどうすればよいですか?
システムでOpenOCDバージョンを確認し、出力がWikiスクリーンショットに表示されている推奨バージョンと一致しない場合、複数のOpenOCDインストールがあるか、システムがデフォルトで異なるバージョンを使用している可能性があります。
Windowsコンピュータでは、システム環境変数を開き、システム変数セクションに移動します。Path変数を編集し、Wiki推奨のOpenOCDインストールのパス(例:C:\Users\YourName\AppData\Local\xPacks\OpenOCD\xpack-openocd-0.12.0-7\bin)をリストの最上位に移動します。これにより、推奨されるOpenOCDバージョンがシステムによって最初に見つけられ、使用されるようになります。この変更を行った後、新しいターミナルを開き、openocd --versionを再実行して、正しいバージョンが表示されることを確認してください。