Seeed Studio XIAO ESP32S3 と MicroPython

MicroPython は、部分的なネイティブコードコンパイル機能を持つPythonインタープリターです。組み込みプロセッサーや制約のあるシステム向けに実装されたPython 3.5機能のサブセットを提供します。CPythonとは異なり、その違いについてはこちらで詳しく読むことができます。
MicroPython のインストール
Esptool のインストール
まだesptool.pyをインストールしていない場合は、PCでpipを使用してインストールできます:
pip install esptool
XIAO ESP32S3 MicroPython ファームウェアをダウンロードする
micropython.orgからファームウェアバイナリファイルをダウンロードする必要があります。 正しいbinファイルをダウンロードした後、フォルダに移動し、そこでcmdターミナルを開きます。 最終稿の時点で、binファイルの最新バージョンは以下の通りです:
ESP32_GENERIC_S3-20230602-v1.23.0.bin
PC に XIAO ESP32S3 を接続する
XIAO ESP32S3 ボードの BOOT ボタンを押し続けながら、Type C USB ケーブルで PC に接続して「ブートローダー」モードに入る必要があります。
ポートの確認
PC 上のすべてのシリアルデバイスを確認します。
- Linux
Linux では、dmesg コマンドを使用して接続されたデバイスを確認できます:
dmesg | grep tty
または、lsを使用してシリアルデバイスを一覧表示することもできます:
ls /dev/ttyS* /dev/ttyUSB*
- Windows
Windowsでは、デバイスマネージャーを開くことでUSBシリアルポートアドレスを確認できます。
- macOS
macOSでは、lsコマンドを使用して利用可能なシリアルポートを一覧表示できます:
ls /dev/cu*
これにより、すべてのシリアルポートデバイスが表示されます。

ポートがビジー状態の場合、以下のコマンドを使用してポートを使用しているプロセスを見つけて終了できます(macOS上で): ポートを使用しているプロセスを特定する:
lsof | grep port
このコマンドは開いているファイルを一覧表示し、指定されたポートを使用しているプロセスを検索します。 出力からプロセスID(PID)を見つけて、そのプロセスを終了させます:
kill -9 <PID>
PID を実際に見つかったプロセス ID に置き換えてください。
フラッシュの消去
esptool.py --chip esp32s3 --port /dev/cu.usbmodem11301 erase_flash
'/dev/cu.usbmodem11301' をシステムの正しいポート名に置き換えてください(例:Windows では COM3、Linux では /dev/ttyUSB0)。
フラッシュ書き込み
XIAO ESP32S3 にファームウェアをフラッシュします:
esptool.py --chip esp32s3 --port /dev/cu.usbmodem11301 --baud 460800 write_flash -z 0x0 ESP32_GENERIC_S3-20240602-v1.23.0.bin
再度、'/dev/cu.usbmodem11301' を正しいポート名に、'ESP32_GENERIC_S3-20240602-v1.23.0.bin' をブランクファームウェアファイルのパスに置き換えてください。 RTSピンによるハードリセットを忘れずに行ってください。 その後、お好みのツールを使用してESP32にスクリプトのコンパイルを開始できます!
MicroPythonの推奨エディタ
人気のあるツールを以下に示します。
1. Thonny
Thonnyをインストールして開き、以下の手順に従ってThonnyを設定してください:
pip install thonny
#open thonny after installation
thonny
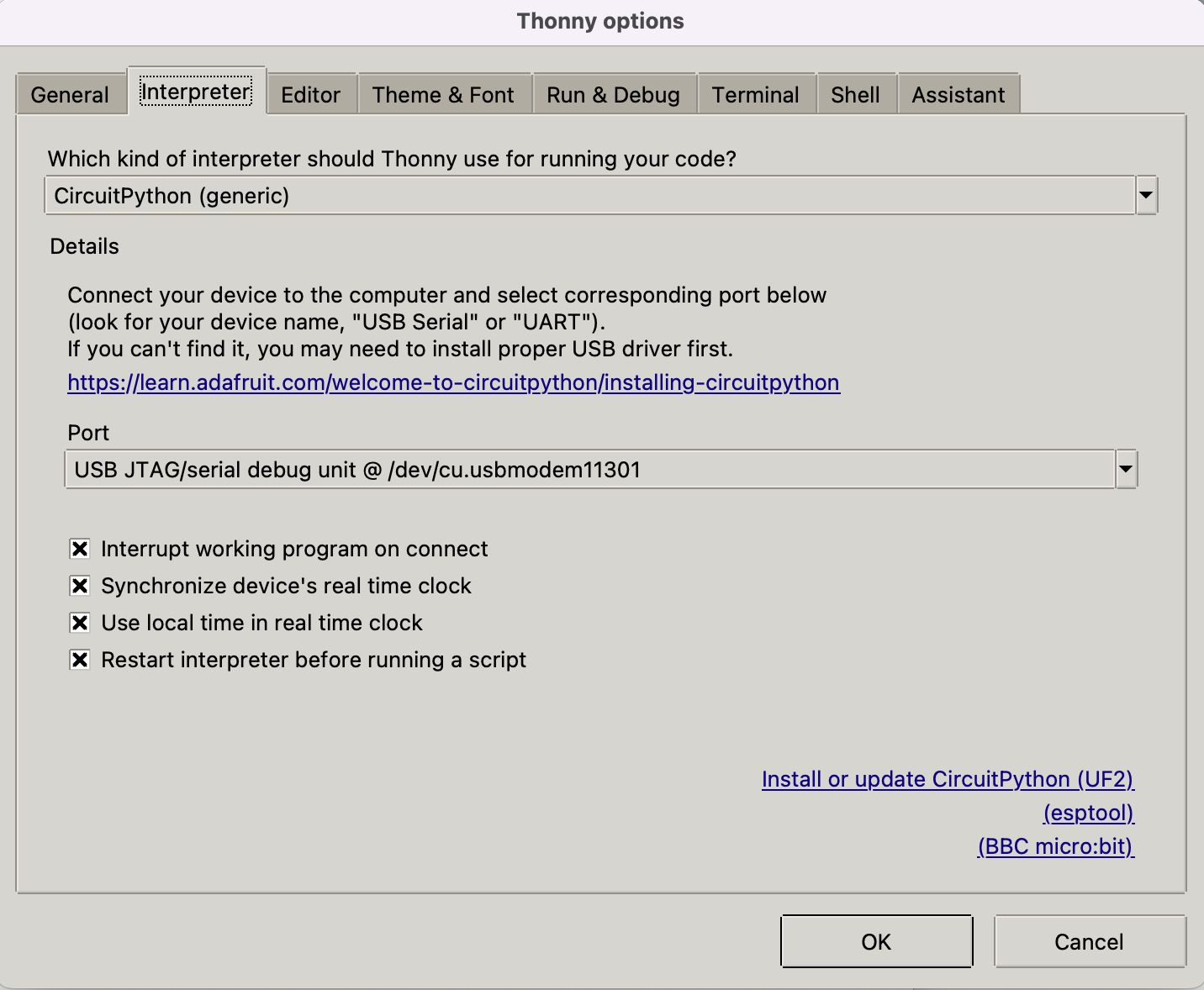
Run-->Configure Interpreterに移動し、Thonnyオプションのインタープリタータブが以下のように表示されることを確認し、"CircuitPython (generic)"とポートを選択してください:
ダイアログで「OK」をクリックすると、下図に示すようにthonnyウィンドウの下部にMicropythonシェルが表示されます。 フラッシュとSRAMサイズを取得するために、シェルにスクリプトを1行ずつ入力してください:
import esp
esp.flash_size()

XIAO ESP32S3でThonnyを使用してMicroPythonのセットアップが正常に完了しました。おめでとうございます!
2. MicroPython用Arduino Lab
Arduino lab for MicroPythonをダウンロードし、デバイスをPCに接続してください。
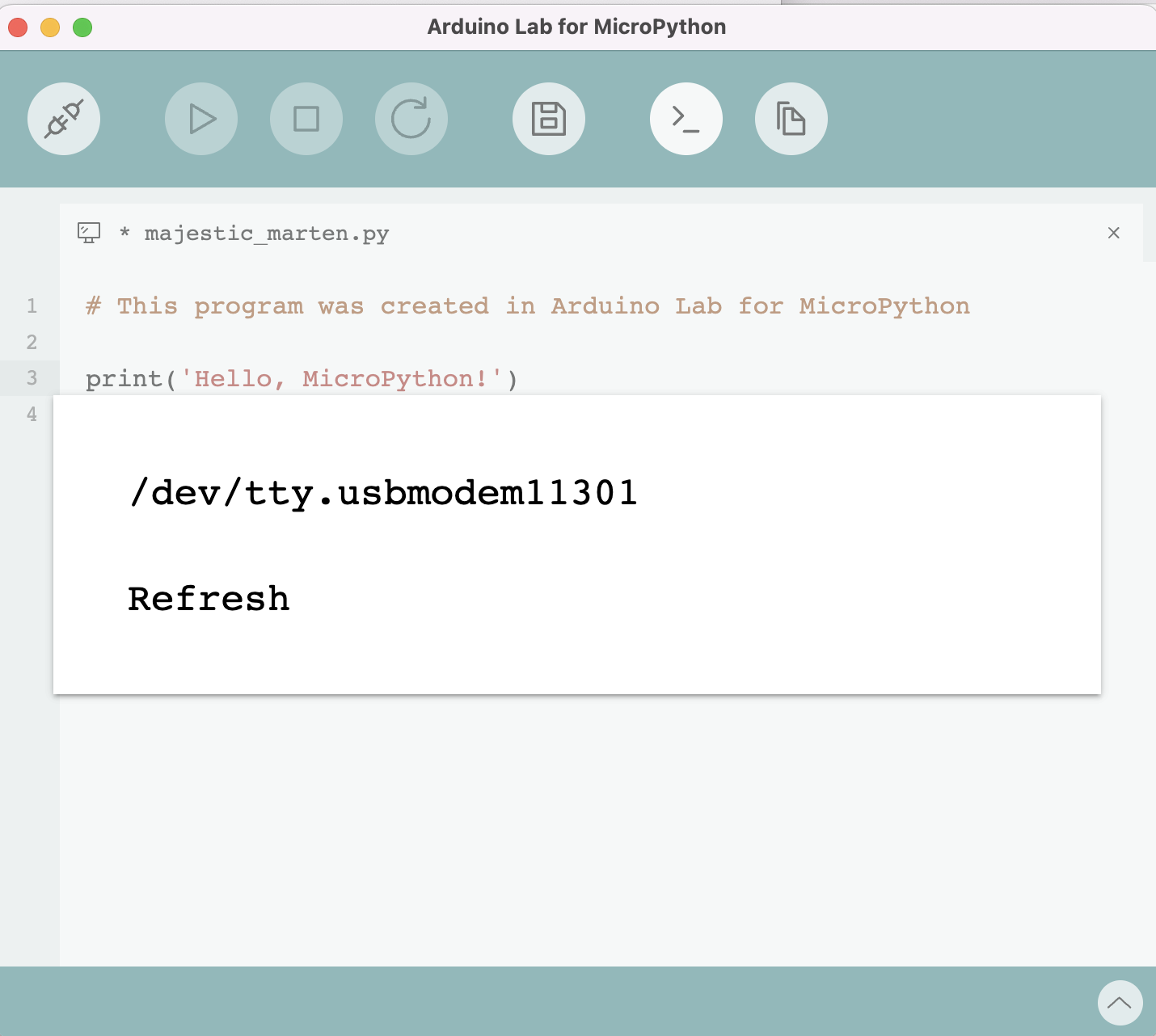
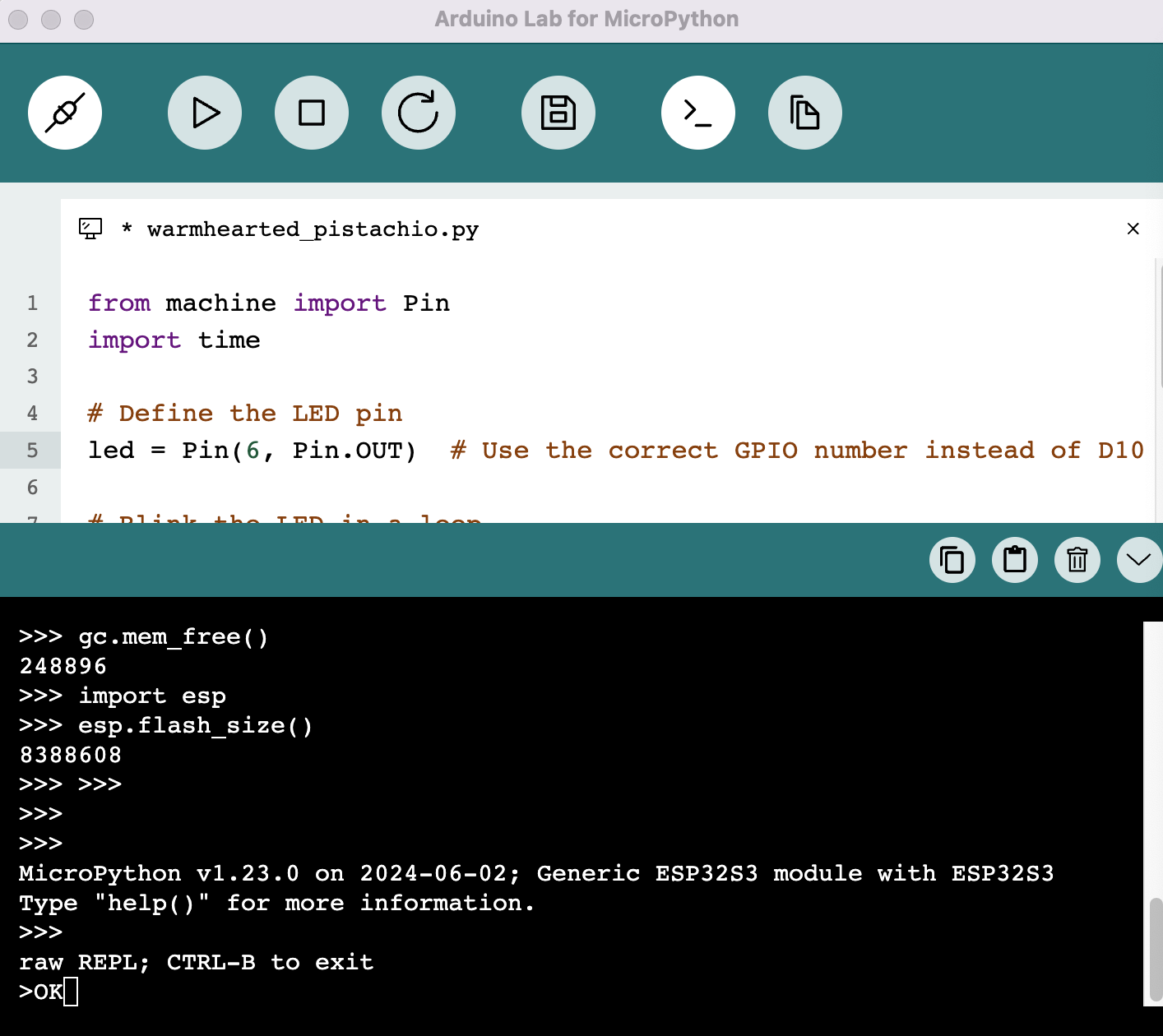
次のようにコードを書きます:
from machine import Pin
import time
# Define the LED pin
led = Pin(6, Pin.OUT) # Use correct gpio
# Blink the LED in a loop
while True:
led.value(1) # Turn the LED on
time.sleep(1) # Wait for a second
led.value(0) # Turn the LED off
time.sleep(1) # Wait for a second
3. Visual Studio Code上のPymakr
- Pymakrをインストール インストール手順に従ってPymakrをインストールしてください。
- XIAO ESP32S3をコンピューターに接続します。
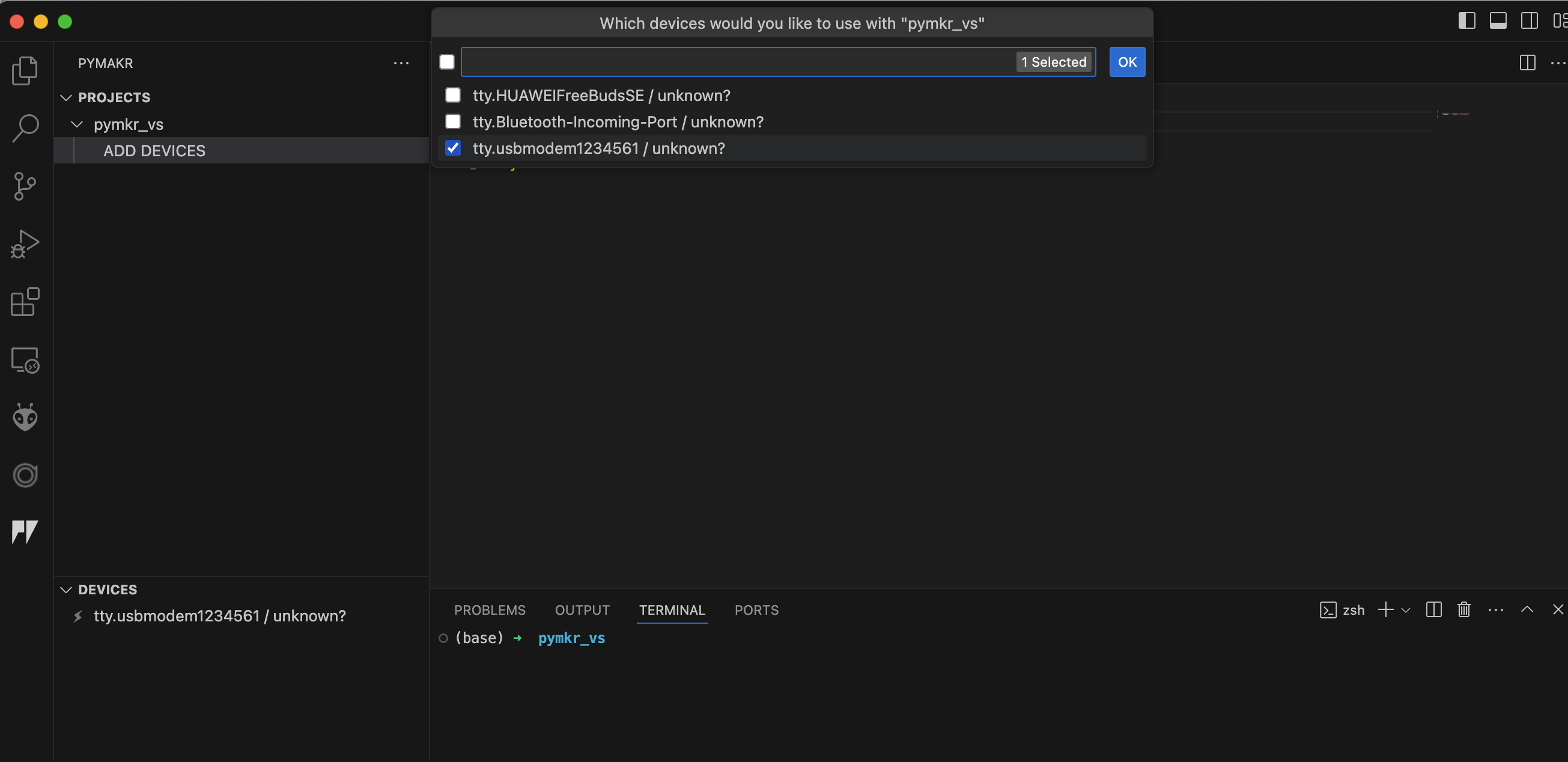
- 新しいプロジェクトを作成 VS Codeを開き、マイクロコントローラー用の新しいプロジェクトを作成します。
- 新しいPythonファイルを追加 プロジェクト内に新しいPythonファイルを作成します。
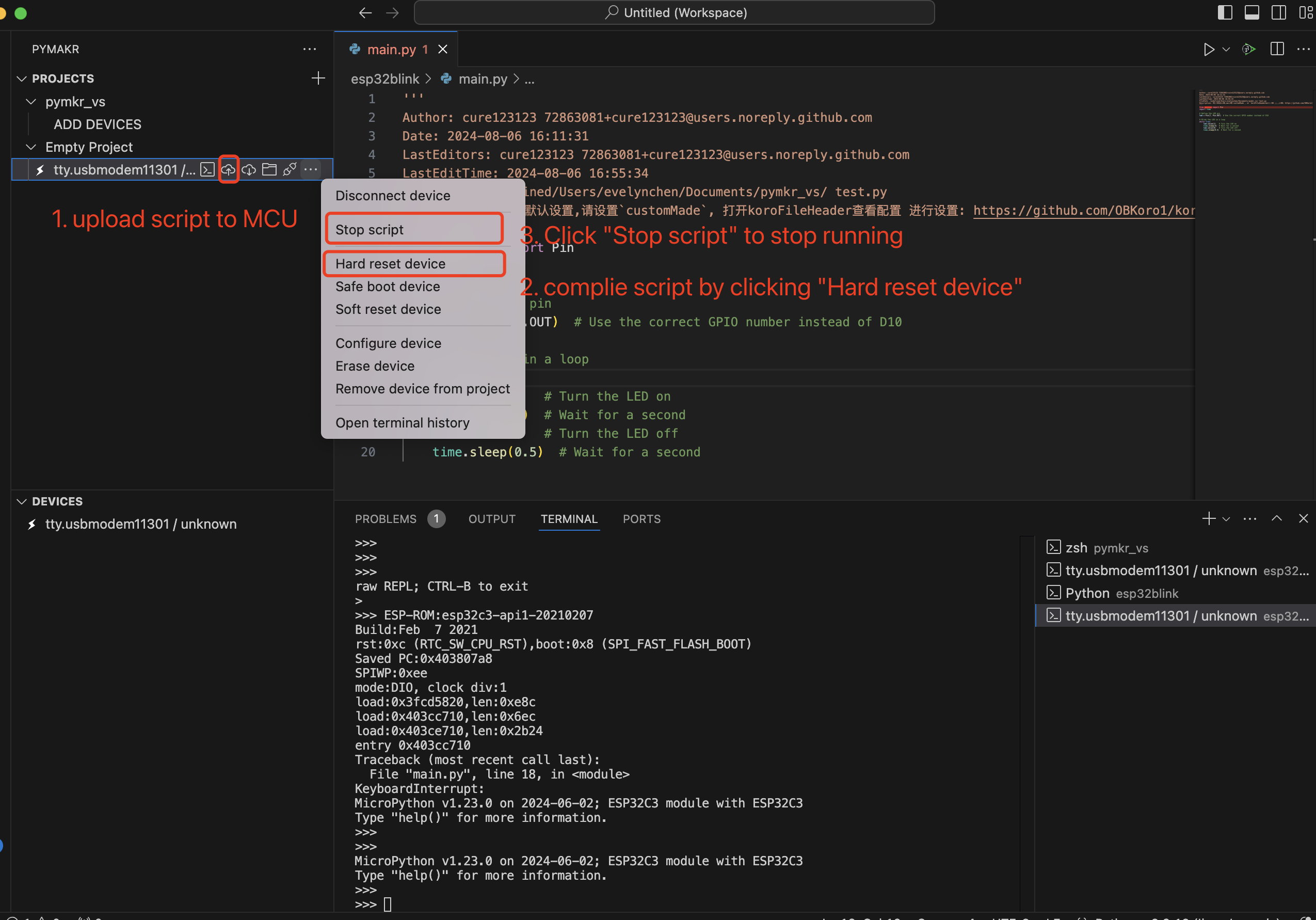
- スクリプトをMCUにアップロードしてスクリプトをコンパイル
4. uPtCraft IDE
ピンアウト/ポート情報
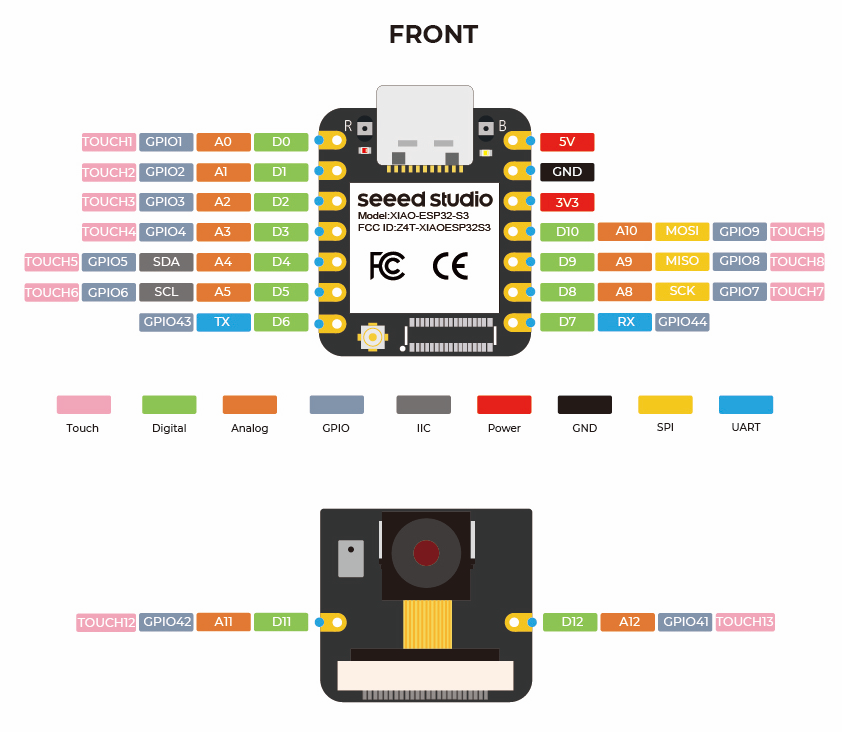
- 詳細についてはハードウェア概要を参照してください
- Seeed Studio XIAO ESP32S3 回路図
XIAO ESP32S3でのMicroPython入門
こちらはmicropythonによるESP32操作のクイックリファレンスです。 micropythonライブラリについての詳細な知識については、こちらをご覧ください。
一般的なボード制御
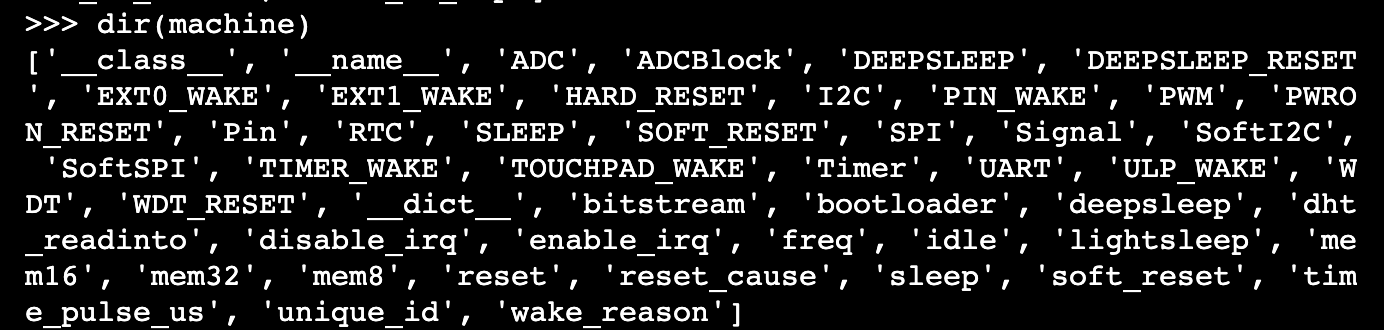
MicroPython REPL(Read-Eval-Print-Loop)はUART0(GPIO1=TX、GPIO3=RX)でボーレート115200で動作します。タブ補完は、オブジェクトがどのようなメソッドを持っているかを調べるのに便利です。ペーストモード(ctrl-E)は、大きなPythonコードの塊をREPLに貼り付けるのに便利です。 MicroPython(Pythonと同様)で*dir()関数を使用して、オブジェクトの属性とメソッドをリストできます。 例えば、シェルにdir(machine)*と入力します:
machineモジュール:
import machine
machine.freq() # get the current frequency of the CPU, for esp32s3 is 240000000
machine.freq(160000000) # set the CPU frequency to 160 MHz
#frequency must be 20MHz, 40MHz, 80Mhz, 160MHz or 240MHz
esp モジュール:
import esp
esp.osdebug(None) # turn off vendor O/S debugging messages
esp.osdebug(0) # redirect vendor O/S debugging messages to UART(0)
# low level methods to interact with flash storage
esp.flash_size()
esp.flash_user_start()
esp.flash_erase(sector_no)
esp.flash_write(byte_offset, buffer)
esp.flash_read(byte_offset, buffer)
esp32 モジュール: ESP32C3、ESP32S2、および ESP32S3 には内蔵温度センサーが利用可能で、摂氏温度を返します:
import esp32
esp32.mcu_temperature() # read the internal temperature of the MCU, in Celsius
Network-WLAN
Network モジュール: 詳細情報についてはこちらを参照してください。
import network
wlan = network.WLAN(network.STA_IF) # create station interface
wlan.active(True) # activate the interface
wlan.scan() # scan for access points
wlan.isconnected() # check if the station is connected to an AP
wlan.connect('ssid', 'key') # connect to an AP
wlan.config('mac') # get the interface's MAC address
wlan.ifconfig() # get the interface's IPv4 addresses
ap = network.WLAN(network.AP_IF) # create access-point interface
ap.config(ssid='ESP-AP') # set the SSID of the access point
ap.config(max_clients=10) # set how many clients can connect to the network
ap.active(True) # activate the interface
ローカルWiFiネットワークに接続するための便利な関数は以下の通りです:
def do_connect():
import network
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
if not wlan.isconnected():
print('connecting to network...')
wlan.connect('ssid', 'key') #replace the ssid and key
while not wlan.isconnected():
pass
print('network config:', wlan.ifconfig())
遅延とタイミング
The time module:
import time
time.sleep(1) # sleep for 1 second
time.sleep_ms(500) # sleep for 500 milliseconds
time.sleep_us(10) # sleep for 10 microseconds
start = time.ticks_ms() # get millisecond counter
delta = time.ticks_diff(time.ticks_ms(), start) # compute time difference
タイマー
ESP32ポートには4つのハードウェアタイマーがあります。0から3(含む)のタイマーIDでクラスを使用してください:
from machine import Timer
tim0 = Timer(0)
tim0.init(period=5000, mode=Timer.ONE_SHOT, callback=lambda t:print(0))
tim1 = Timer(1)
tim1.init(period=2000, mode=Timer.PERIODIC, callback=lambda t:print(1))
この期間はミリ秒単位です。 仮想タイマーは現在このポートではサポートされていません。
ピンとGPIO
machine.Pinクラス:
from machine import Pin
p2 = Pin(2, Pin.OUT) # create output pin on GPIO2
p2.on() # set pin to "on" (high) level
p2.off() # set pin to "off" (low) level
p2.value(1) # set pin to on/high
p3 = Pin(3, Pin.IN) # create input pin on GPIO3
print(p3.value()) # get value, 0 or 1
p4 = Pin(4, Pin.IN, Pin.PULL_UP) # enable internal pull-up resistor
p5 = Pin(5, Pin.OUT, value=1) # set pin high on creation
p6 = Pin(6, Pin.OUT, drive=Pin.DRIVE_3) # set maximum drive strength
利用可能なピンは以下の範囲(両端含む)です:1,2,3,4,5,6,7,8,9,43,44。これらはESP32S3チップの実際のGPIOピン番号に対応しています。
UART(シリアルバス)
machine.UARTクラス:
from machine import UART
uart1 = UART(1, baudrate=9600, tx=43, rx=44)
uart1.write('hello') # write 5 bytes
uart1.read(5) # read up to 5 bytes
ESP32C3には1つのハードウェアUARTがあります。以下にピンを示します:
| UART | Pin |
|---|---|
| TX | 43 |
| RX | 44 |
PWM(パルス幅変調)
PWMは出力可能なすべてのピンで有効にできます。基本周波数は1Hzから40MHzまでの範囲ですが、トレードオフがあります;基本周波数が増加するとデューティ分解能が減少します。 machine.PWMクラス:
from machine import Pin, PWM
pwm2 = PWM(Pin(2), freq=5000, duty_u16=32768) # create PWM object from a pin
freq = pwm2.freq() # get current frequency
pwm2.freq(1000) # set PWM frequency from 1Hz to 40MHz
duty = pwm2.duty() # get current duty cycle, range 0-1023 (default 512, 50%)
pwm2.duty(256) # set duty cycle from 0 to 1023 as a ratio duty/1023, (now 25%)
duty_u16 = pwm2.duty_u16() # get current duty cycle, range 0-65535
pwm2.duty_u16(2**16*3//4) # set duty cycle from 0 to 65535 as a ratio duty_u16/65535, (now 75%)
duty_ns = pwm2.duty_ns() # get current pulse width in ns
pwm2.duty_ns(250_000) # set pulse width in nanoseconds from 0 to 1_000_000_000/freq, (now 25%)
pwm2.deinit() # turn off PWM on the pin
pwm3 = PWM(Pin(3), freq=20000, duty=512) # create and configure in one go
print(pwm3) # view PWM settings
ADC(アナログ・デジタル変換)
XIAO ESP32S3では、ADC機能はピン1、2、3、4、5、6、7、8、9で利用できます。 machine.ADCクラス:
from machine import ADC
adc = ADC(pin) # create an ADC object acting on a pin
val = adc.read_u16() # read a raw analog value in the range 0-65535
val = adc.read_uv() # read an analog value in microvolts
SPI
ソフトウェア SPI バス
ソフトウェア SPI(ビットバンギングを使用)はすべてのピンで動作し、machine.SoftSPI クラス経由でアクセスされます:
from machine import Pin, SoftSPI
# construct a SoftSPI bus on the given pins
# polarity is the idle state of SCK
# phase=0 means sample on the first edge of SCK, phase=1 means the second
spi = SoftSPI(baudrate=100000, polarity=1, phase=0, sck=Pin(2), mosi=Pin(4), miso=Pin(6))
spi.init(baudrate=200000) # set the baudrate
spi.read(10) # read 10 bytes on MISO
spi.read(10, 0xff) # read 10 bytes while outputting 0xff on MOSI
buf = bytearray(50) # create a buffer
spi.readinto(buf) # read into the given buffer (reads 50 bytes in this case)
spi.readinto(buf, 0xff) # read into the given buffer and output 0xff on MOSI
spi.write(b'12345') # write 5 bytes on MOSI
buf = bytearray(4) # create a buffer
spi.write_readinto(b'1234', buf) # write to MOSI and read from MISO into the buffer
spi.write_readinto(buf, buf) # write buf to MOSI and read MISO back into buf
ハードウェア SPI バス
ハードウェア SPI は machine.SPI クラス経由でアクセスされ、上記のソフトウェア SPI と同じメソッドを持ちます:
from machine import Pin, SPI
hspi = SPI(1, 10000000)
hspi = SPI(1, 10000000, sck=Pin(7), mosi=Pin(9), miso=Pin(8))
| SPI | ピン |
|---|---|
| SCK | D7 |
| MOSI | D9 |
| MISO | D8 |
I2C
ソフトウェアI2Cバス
ソフトウェアI2C(ビットバンギングを使用)は、すべての出力可能なピンで動作し、machine.SoftI2Cクラスを介してアクセスされます:
from machine import Pin, SoftI2C
i2c = SoftI2C(scl=Pin(6), sda=Pin(5), freq=100000)
i2c.scan() # scan for devices
i2c.readfrom(0x3a, 4) # read 4 bytes from device with address 0x3a
i2c.writeto(0x3a, '12') # write '12' to device with address 0x3a
buf = bytearray(10) # create a buffer with 10 bytes
i2c.writeto(0x3a, buf) # write the given buffer to the peripheral
ハードウェア I2C バス
ドライバは machine.I2C クラス経由でアクセスされ、上記のソフトウェア I2C と同じメソッドを持ちます:
from machine import Pin, I2C
i2c = I2C(0, scl=Pin(6), sda=Pin(5), freq=400000)
XIAO用拡張ボードベース
前提条件:
| XIAO ESP32S3 ヘッダーはんだ付け済み | XIAO用拡張ボードベース | Grove 光センサー |
|---|---|---|
 |  |  |
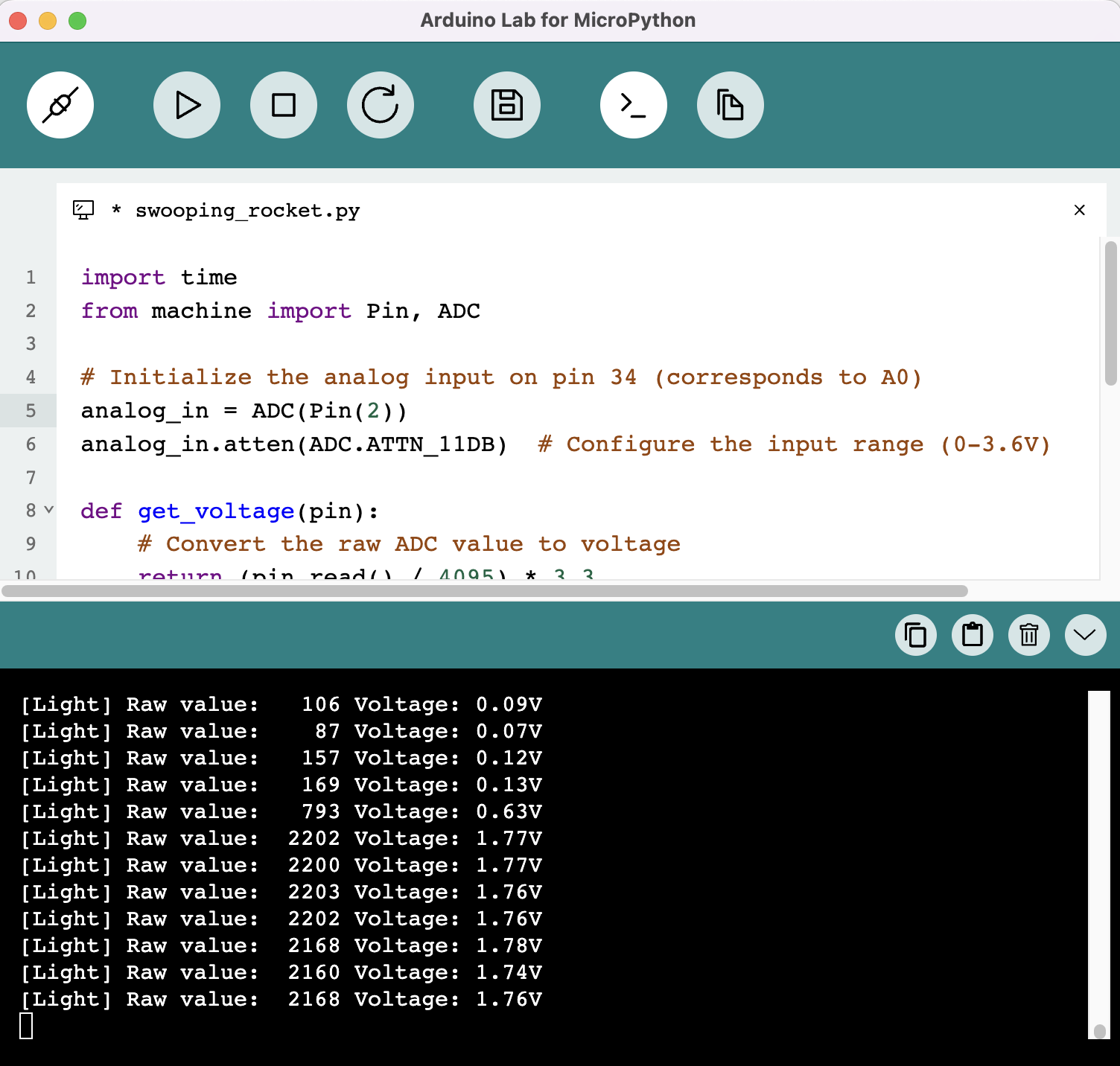
光センサーデータの読み取り
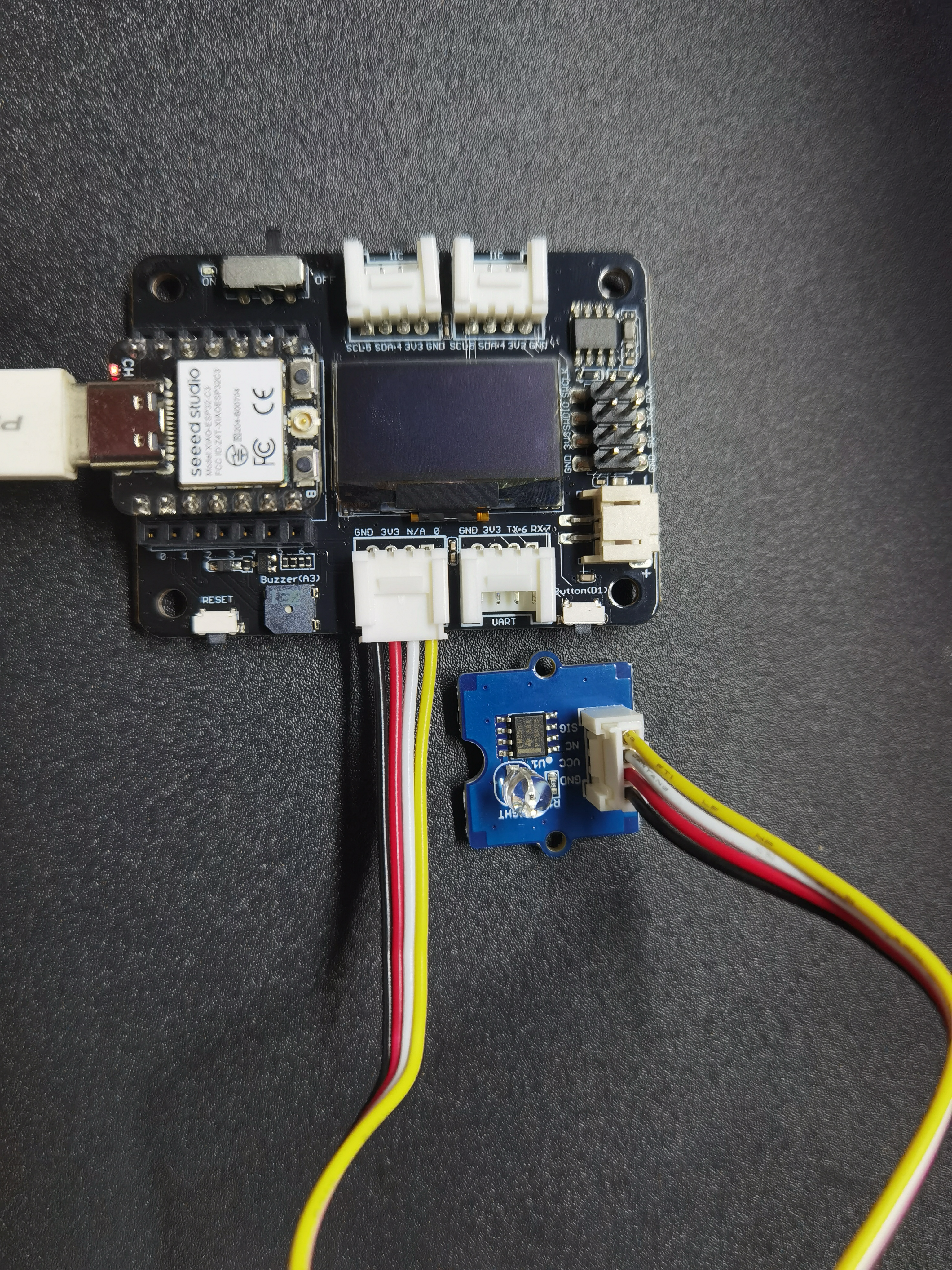
import time
from machine import Pin, ADC
# Initialize the analog input on pin 2 (corresponds to A0)
analog_in = ADC(Pin(1))
analog_in.atten(ADC.ATTN_11DB) # Configure the input range (0-3.6V)
def get_voltage(pin):
# Convert the raw ADC value to voltage
return (pin.read() / 4095) * 3.3
while True:
# Read the raw analog value
raw_value = analog_in.read()
# Convert the raw value to voltage
voltage = get_voltage(analog_in)
# Print the raw value and voltage to the serial console
print("[Light] Raw value: {:5d} Voltage: {:.2f}V".format(raw_value, voltage))
# Delay for a short period of time before reading again
time.sleep(1)
OLEDスクリーンを点灯させる
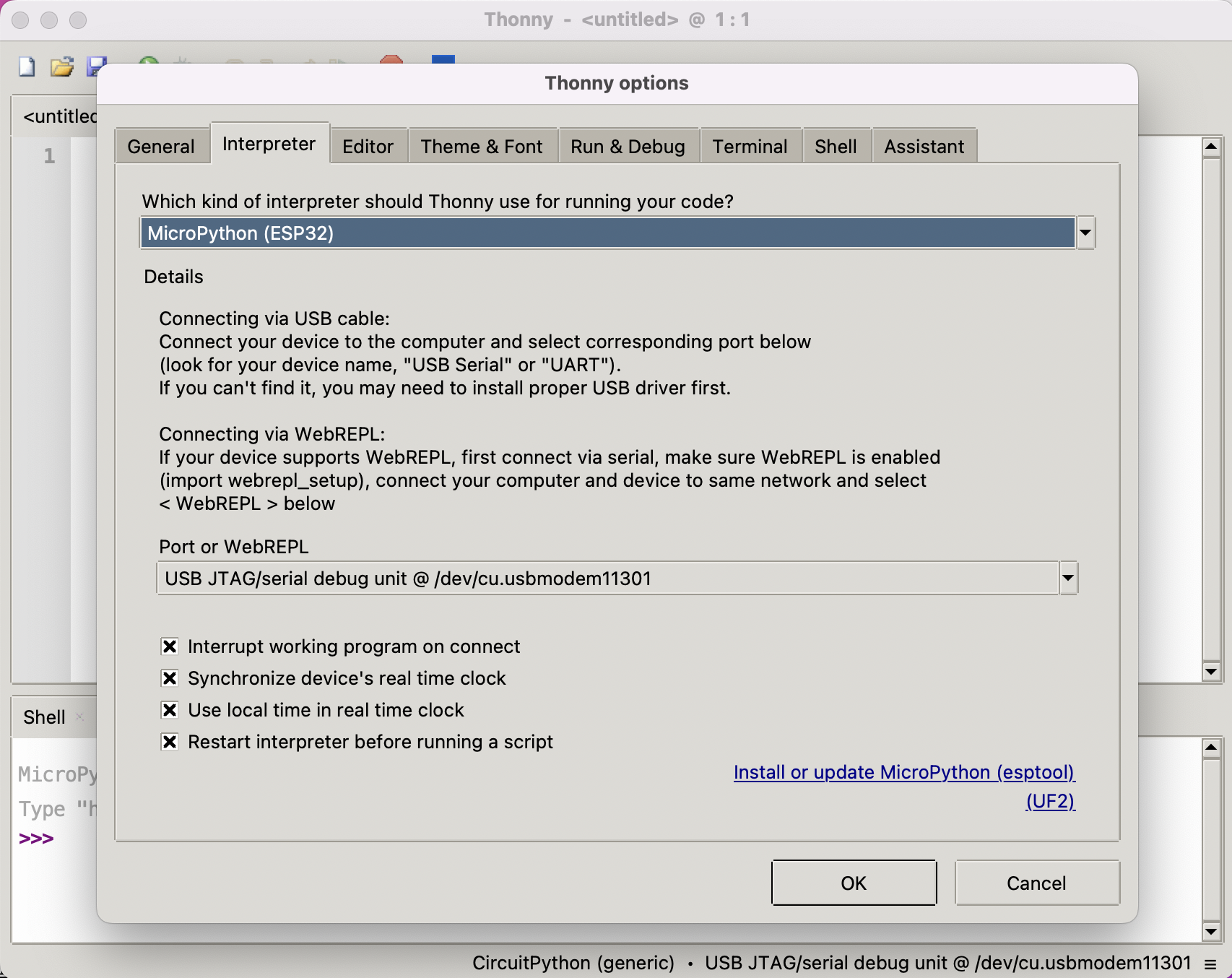
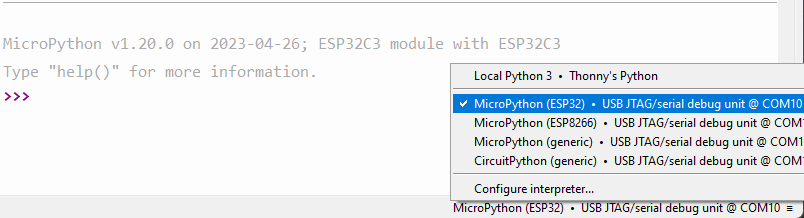
XIAO ESP32S3を接続し、Thonnyを開いて右下をクリックしてインタープリターを設定します インタープリター - MicroPython (ESP32) を選択し、ポート >>> OKをクリック
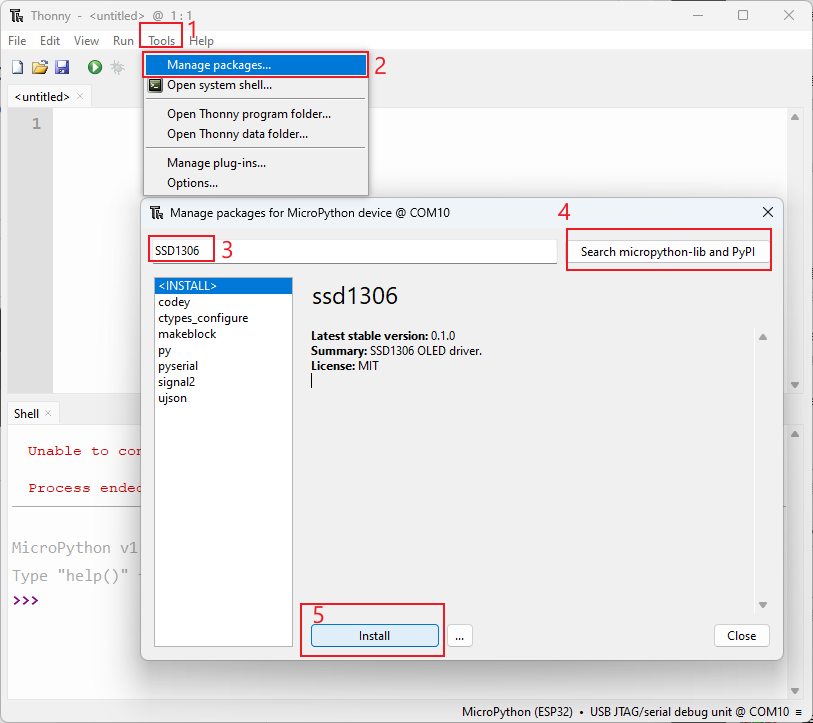
すべてがうまくいけば、シェルに出力が表示されます MicroPythonからssd1306ライブラリをインストールします。 「Tools」をクリック >>> 「Management Packages」をクリック >>> ライブラリ名を入力 >>> 「Search micropython-lib and PyPl」をクリック
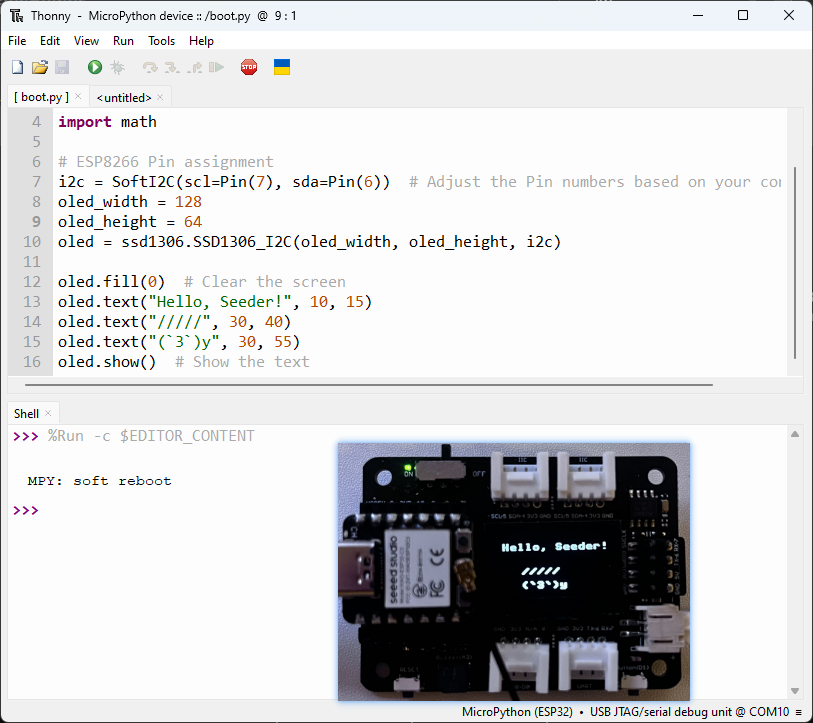
スクリプトを実行してボードにフラッシュします。 コーディングが完了したら、緑色のボタンをクリックしてスクリプトを実行します。
import time
from machine import Pin, SoftI2C
import ssd1306
import math
# ESP8266 Pin assignment
i2c = SoftI2C(scl=Pin(6), sda=Pin(5)) # Adjust the Pin numbers based on your connections
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
oled.fill(0) # Clear the screen
oled.text("Hello, Seeder!", 10, 15)
oled.text("/////", 30, 40)
oled.text("(`3`)y", 30, 55)
oled.show() # Show the text
カメラストリーミングテスト
カメラストリーミングテストはESP32S3 sense(カメラ付き)にも提供されています。詳細はこちらを参照してください。
この記事をお読みいただき、ありがとうございました!コメントでご意見をお聞かせください。
リソース
- XIAO ESP32S3 用の MicroPython ファームウェアバイナリファイル
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。