Seeed Studio XIAO MG24 Sense 内蔵センサーの使用方法
XIAO MG24 センス IMU
内蔵センサーの概要
6軸IMU(慣性測定ユニット)センサーであるLSM6DS3TR-Cのようなセンサーは、加速度計とジャイロスコープを統合して、3次元空間における物体の動きと方向を測定します。具体的に、LSM6DS3TR-Cには以下の機能があります:
加速度計機能:
- X、Y、Z軸に沿った物体の加速度を測定します。物体の動き(例:静止、加速、減速)と傾きの変化(例:物体の角度)を感知することができます。
- 歩行、位置変化、振動などの検出に使用できます。
ジャイロスコープ機能:
- X、Y、Z軸周りの物体の角速度、つまり物体の回転を測定します。
- 回転、回転速度、方向の変化の検出に使用できます。
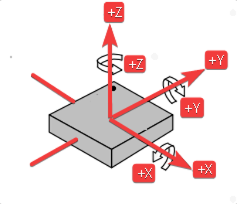
- **X軸角度(Roll)**は、X軸周りの回転方向の角度です。
- **Y軸角度(Pitch)**は、Y軸周りの回転方向の角度です。
- **Z軸角度(Yaw)**は、Z軸周りの回転方向の角度です。
ソフトウェアの準備
GitHubダウンロードリンクをクリックして、6軸センサーのドライバーをダウンロードしてください。
コード実装
#include <LSM6DS3.h>
#include <Wire.h>
//Create a instance of class LSM6DS3
LSM6DS3 myIMU(I2C_MODE, 0x6A); //I2C device address 0x6A
float aX, aY, aZ, gX, gY, gZ;
const float accelerationThreshold = 2.5; // threshold of significant in G's
const int numSamples = 119;
int samplesRead = numSamples;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
while (!Serial);
pinMode(PD5,OUTPUT);
digitalWrite(PD5,HIGH);
//Call .begin() to configure the IMUs
if (myIMU.begin() != 0) {
Serial.println("Device error");
} else {
Serial.println("aX,aY,aZ,gX,gY,gZ");
}
}
void loop() {
// wait for significant motion
while (samplesRead == numSamples) {
// read the acceleration data
aX = myIMU.readFloatAccelX();
aY = myIMU.readFloatAccelY();
aZ = myIMU.readFloatAccelZ();
// sum up the absolutes
float aSum = fabs(aX) + fabs(aY) + fabs(aZ);
// check if it's above the threshold
if (aSum >= accelerationThreshold) {
// reset the sample read count
samplesRead = 0;
break;
}
}
// check if the all the required samples have been read since
// the last time the significant motion was detected
while (samplesRead < numSamples) {
// check if both new acceleration and gyroscope data is
// available
// read the acceleration and gyroscope data
samplesRead++;
// print the data in CSV format
Serial.print(myIMU.readFloatAccelX(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatAccelY(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatAccelZ(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatGyroX(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatGyroY(), 3);
Serial.print(',');
Serial.print(myIMU.readFloatGyroZ(), 3);
Serial.println();
if (samplesRead == numSamples) {
// add an empty line if it's the last sample
Serial.println();
}
}
}
LSM6DS3ライブラリのアップデートにより、以前にこのライブラリをユーザーに追加したことがある場合は、バージョン2.0.4以上を再ダウンロードし、ZIPファイルをArduinoに追加する必要があります。
機能概要
-
ライブラリのインクルード
#include <LSM6DS3.h>
#include <Wire.h>- LSM6DS3センサーとの通信用ライブラリを含みます。
- I2C通信用ライブラリを含みます。
-
センサーインスタンスの作成
LSM6DS3 myIMU(I2C_MODE, 0x6A)IMUセンサー用のLSM6DS3クラスのインスタンスを作成し、I2C通信モードとデバイスアドレス0x6Aを指定します。
-
変数と定数
float aX, aY, aZ, gX, gY, gZ: 加速度計とジャイロスコープのデータを格納する変数。const float accelerationThreshold = 2.5: 重要な動きを検出するためのG単位での閾値。const int numSamples = 119: 重要な動きを検出した後に収集するサンプル数。int samplesRead = numSamples: サンプルカウンターを総サンプル数で初期化し、まだデータが収集されていないことを示します。
-
基本設定
pinMode(PD5,OUTPUT);
digitalWrite(PD5,HIGH);- ジャイロ有効ピンをオンにします。
-
データ処理
aX = myIMU.readFloatAccelX();:
aY = myIMU.readFloatAccelY();:
aZ = myIMU.readFloatAccelZ();:
float aSum = fabs(aX) + fabs(aY) + fabs(aZ);- X軸方向の加速度を読み取ります。
- Y軸方向の加速度を読み取ります。
- Z軸方向の加速度を読み取ります。
- 加速度データの絶対値の合計を計算します。
fabs()は絶対値を返します。
// check if it's above the threshold
if (aSum >= accelerationThreshold) {
// reset the sample read count
samplesRead = 0;
break;
}- 絶対加速度値の合計が設定された閾値以上の場合、サンプル数samplesReadを0にリセットしてループを終了します。
-
データの確認
while (samplesRead < numSamples) {
samplesRead++;
.
.
.
.
.
if (samplesRead == numSamples) {
// add an empty line if it's the last sample
Serial.println();
}
}- 別のループに移動し、必要なサンプル数が読み取られたかどうかを確認します。
- samplesReadのカウントを増加させます。
- すべてのサンプルが読み取られた場合、データ出力を区切るために空行を印刷します。
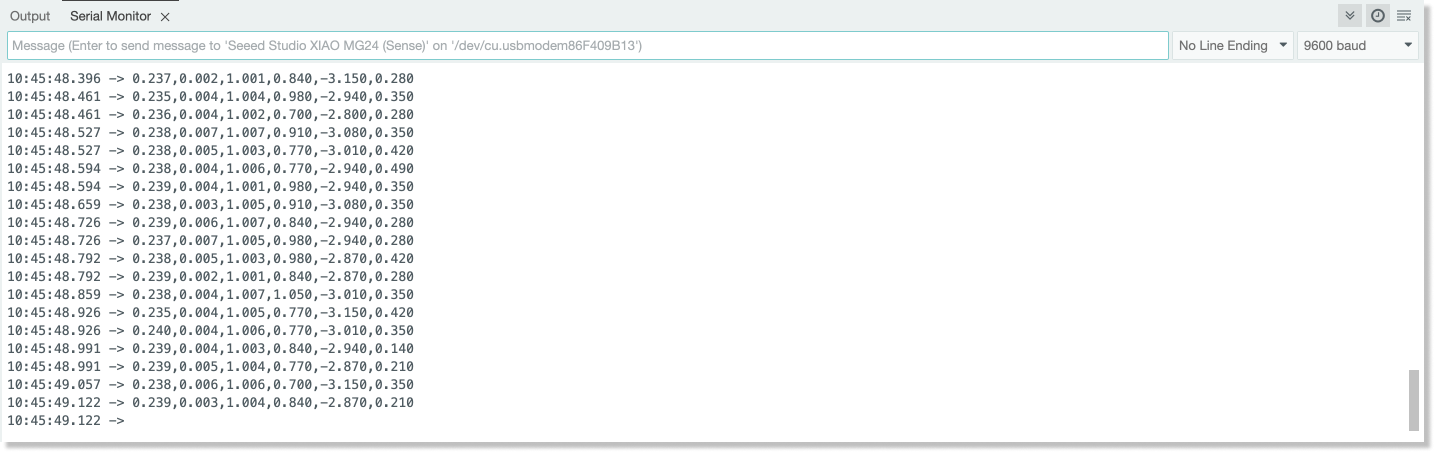
結果チャート
より詳しく
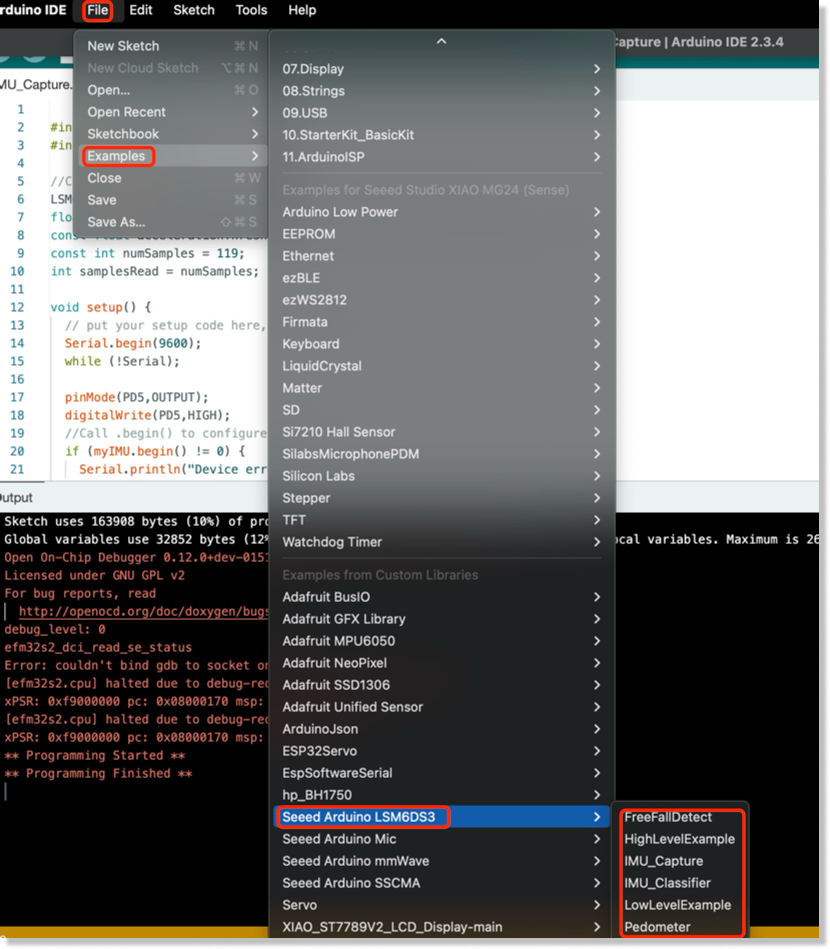
より多くのサンプルコードが必要な場合は、**「File」-> Example -> Seeed Arduino LSM6DS3」**をクリックしてください。
IMU 高度なデモ
ハードウェア準備


ソフトウェア準備
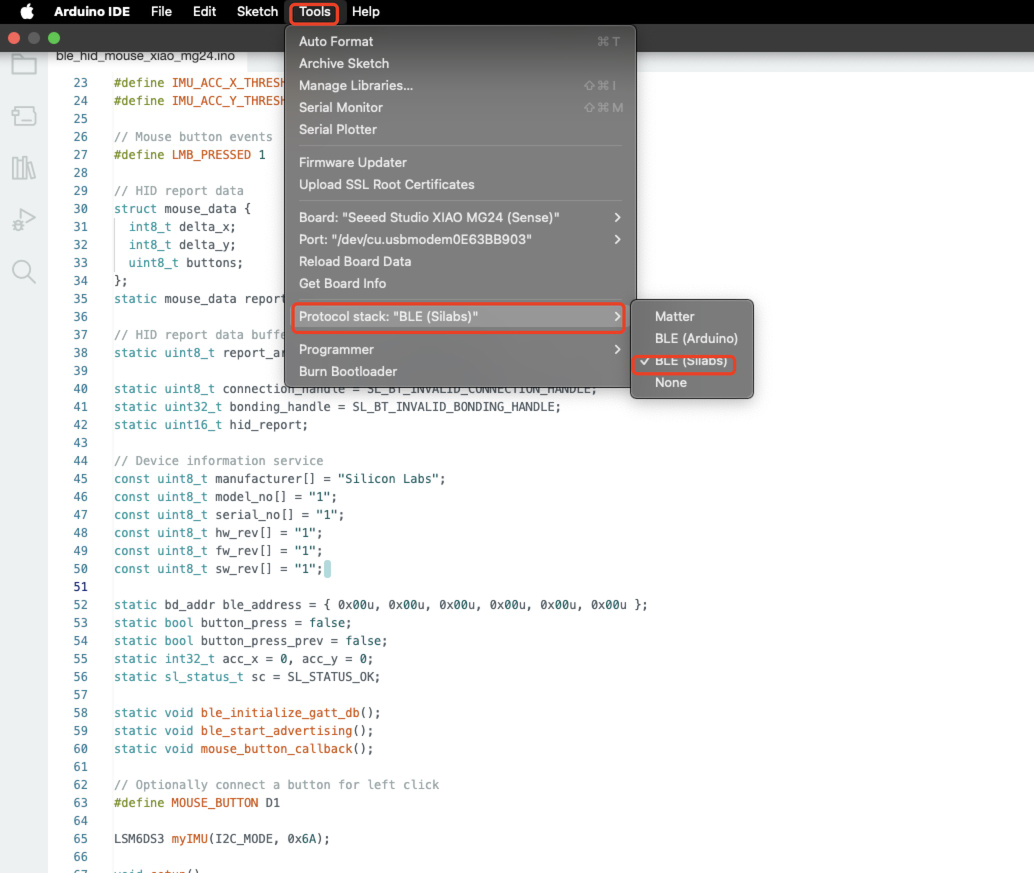
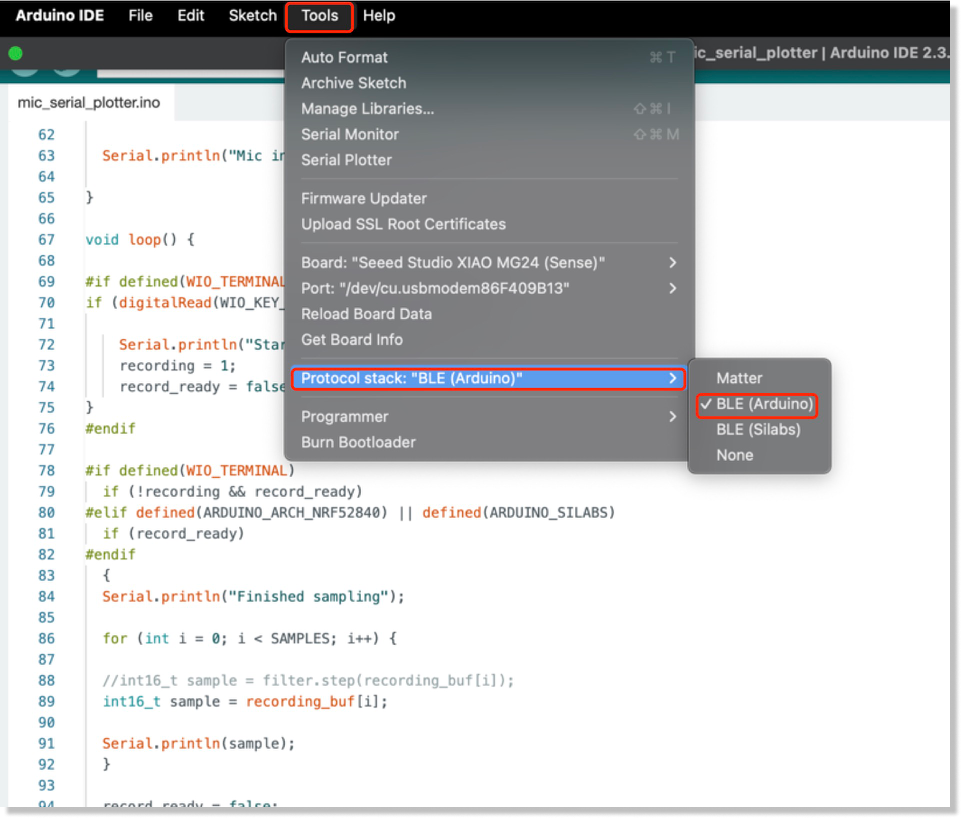
プログラムを書き込むために、ツールバーで対応するスタックを選択する必要があります。
プログラムコード
#include <LSM6DS3.h>
#include "Wire.h"
#define DEVICE_NAME "XIAO MG24 Mouse"
#define IMU_ACC_X_THRESHOLD 10
#define IMU_ACC_Y_THRESHOLD 10
// Mouse button events
#define LMB_PRESSED 1
// HID report data
struct mouse_data {
int8_t delta_x;
int8_t delta_y;
uint8_t buttons;
};
static mouse_data report;
// HID report data buffer
static uint8_t report_array[] = { 0x00, 0x00, 0x00 };
static uint8_t connection_handle = SL_BT_INVALID_CONNECTION_HANDLE;
static uint32_t bonding_handle = SL_BT_INVALID_BONDING_HANDLE;
static uint16_t hid_report;
// Device information service
const uint8_t manufacturer[] = "Silicon Labs";
const uint8_t model_no[] = "1";
const uint8_t serial_no[] = "1";
const uint8_t hw_rev[] = "1";
const uint8_t fw_rev[] = "1";
const uint8_t sw_rev[] = "1";
static bd_addr ble_address = { 0x00u, 0x00u, 0x00u, 0x00u, 0x00u, 0x00u };
static bool button_press = false;
static bool button_press_prev = false;
static int32_t acc_x = 0, acc_y = 0;
static sl_status_t sc = SL_STATUS_OK;
static void ble_initialize_gatt_db();
static void ble_start_advertising();
static void mouse_button_callback();
// Optionally connect a button for left click
#define MOUSE_BUTTON D1
LSM6DS3 myIMU(I2C_MODE, 0x6A);
void setup()
{
// Initialize report data
memset(&report, 0, sizeof(report));
// Enable the IMU power
pinMode(PD5, OUTPUT);
digitalWrite(PD5, HIGH);
delay(300);
pinMode(MOUSE_BUTTON, INPUT_PULLUP);
attachInterrupt(MOUSE_BUTTON, mouse_button_callback, CHANGE);
Serial.begin(115200);
Serial.println("XIAO MG24 BLE mouse");
myIMU.begin();
Serial.println("---");
Serial.println("IMU initialized");
}
void loop()
{
// Update 'left mouse button' bit
if (button_press) {
report.buttons |= LMB_PRESSED;
if (!button_press_prev) {
button_press_prev = true;
Serial.println("Button pressed");
}
} else {
button_press_prev = false;
report.buttons &= ~LMB_PRESSED;
}
// Change x and y for correct orientation of the boards
acc_y = (int32_t)(myIMU.readFloatAccelX() * 10.0f);
acc_x = (int32_t)(myIMU.readFloatAccelY() * 10.0f * -1.0f);
// In case the acceleration value would surpass the threshold value
// in positive or negative direction assign the threshold value
if (acc_x > IMU_ACC_X_THRESHOLD) {
report.delta_x = IMU_ACC_X_THRESHOLD;
} else if (acc_x < (-1 * IMU_ACC_X_THRESHOLD)) {
report.delta_x = (-1 * IMU_ACC_X_THRESHOLD);
} else {
report.delta_x = acc_x;
}
if (acc_y > IMU_ACC_Y_THRESHOLD) {
report.delta_y = IMU_ACC_Y_THRESHOLD;
} else if (acc_y < (-1 * IMU_ACC_Y_THRESHOLD)) {
report.delta_y = (-1 * IMU_ACC_Y_THRESHOLD);
} else {
report.delta_y = acc_y;
}
memcpy(report_array, &report, sizeof(report));
if (connection_handle != SL_BT_INVALID_CONNECTION_HANDLE && bonding_handle != SL_BT_INVALID_BONDING_HANDLE) {
// Indicate report data change with GATT notification
sc = sl_bt_gatt_server_notify_all(hid_report, sizeof(report_array), report_array);
if (sc != SL_STATUS_OK) {
Serial.print("sl_bt_gatt_server_notify_all() returned with error code 0x");
Serial.println(sc, HEX);
} else {
Serial.print("cursor [delta-X: ");
Serial.print(report.delta_x, DEC);
Serial.print(" delta-Y: ");
Serial.print(report.delta_y, DEC);
Serial.print(" ] LMB: ");
Serial.println(report.buttons, HEX);
}
}
}
/******************************************************************************
* Mouse button callback
*****************************************************************************/
void mouse_button_callback()
{
if (digitalRead(MOUSE_BUTTON) == LOW) {
button_press = true;
} else {
button_press = false;
}
}
/******************************************************************************
* Bluetooth stack event handler
* Called when an event happens on BLE the stack
*
* @param[in] evt Event coming from the Bluetooth stack
*****************************************************************************/
void sl_bt_on_event(sl_bt_msg_t* evt)
{
sl_status_t sc = SL_STATUS_OK;
uint8_t ble_address_type;
switch (SL_BT_MSG_ID(evt->header)) {
// -------------------------------
// This event indicates the device has started and the radio is ready
case sl_bt_evt_system_boot_id:
{
// Get BLE address and address type
sc = sl_bt_system_get_identity_address(&ble_address, &ble_address_type);
app_assert_status(sc);
// Print welcome message
Serial.begin(115200);
Serial.println();
Serial.println("BLE stack booted");
// Initialize the application specific GATT DB
ble_initialize_gatt_db();
// HID input devices requires mandatory secure level and bonding
sc = sl_bt_sm_configure(0, sl_bt_sm_io_capability_noinputnooutput);
app_assert_status(sc);
// Allow bonding
sc = sl_bt_sm_set_bondable_mode(1);
app_assert_status(sc);
ble_start_advertising();
}
break;
// -------------------------------
// This event indicates that a BLE connection has been opened
case sl_bt_evt_connection_opened_id:
{
// Store the connection handle which will be needed for sending indications
connection_handle = evt->data.evt_connection_opened.connection;
bonding_handle = evt->data.evt_connection_opened.bonding;
Serial.print("Connection opened - handle 0x");
Serial.println(connection_handle, HEX);
if (bonding_handle == SL_BT_INVALID_BONDING_HANDLE) {
Serial.println("Connection not bonded yet");
} else {
Serial.println("Connection bonded");
}
Serial.println("Increase security");
sc = sl_bt_sm_increase_security(evt->data.evt_connection_opened.connection);
app_assert_status(sc);
}
break;
// -------------------------------
// This event indicates that bonding was successful
case sl_bt_evt_sm_bonded_id:
{
Serial.print("Bonded - handle: 0x");
Serial.print(evt->data.evt_sm_bonded.connection, HEX);
bonding_handle = evt->data.evt_sm_bonded.bonding;
connection_handle = evt->data.evt_sm_bonded.connection;
Serial.print(" - security mode: 0x");
Serial.println(evt->data.evt_sm_bonded.security_mode, HEX);
}
break;
// -------------------------------
// This event indicates that a BLE connection has closed
case sl_bt_evt_connection_closed_id:
{
Serial.print("Connection closed - handle: 0x");
Serial.print(connection_handle, HEX);
Serial.print(" reason: 0x");
Serial.println(evt->data.evt_connection_closed.reason, HEX);
connection_handle = SL_BT_INVALID_CONNECTION_HANDLE;
bonding_handle = SL_BT_INVALID_BONDING_HANDLE;
sc = sl_bt_sm_delete_bondings();
Serial.println("Deleted bondings");
app_assert_status(sc);
ble_start_advertising();
}
break;
// -------------------------------
// This event indicates that the connection parameters have changed
case sl_bt_evt_connection_parameters_id:
{
Serial.print("Set connection parameters, security_mode: ");
Serial.println(evt->data.evt_connection_parameters.security_mode, HEX);
}
break;
// -------------------------------
// This event indicates that bonding has failed
case sl_bt_evt_sm_bonding_failed_id:
{
Serial.print("Bonding failed, reason: 0x");
Serial.println(evt->data.evt_sm_bonding_failed.reason, HEX);
Serial.println("Delete bondings.");
sc = sl_bt_sm_delete_bondings();
app_assert_status(sc);
Serial.println("Bondings deleted");
Serial.print("Close connection - handle: 0x");
Serial.println(evt->data.evt_sm_bonding_failed.connection, HEX);
}
break;
// -------------------------------
// Default event handler
default:
break;
}
}
/******************************************************************************
* Starts BLE advertisement
* Initializes advertising if it's called for the first time
*****************************************************************************/
static void ble_start_advertising()
{
static uint8_t advertising_set_handle = 0xff;
static bool init = true;
sl_status_t sc;
if (init) {
// Create an advertising set
sc = sl_bt_advertiser_create_set(&advertising_set_handle);
app_assert_status(sc);
// Set advertising interval to 100ms
sc = sl_bt_advertiser_set_timing(
advertising_set_handle,
160, // Minimum advertisement interval (milliseconds * 1.6)
160, // Maximum advertisement interval (milliseconds * 1.6)
0, // Advertisement duration
0); // Maximum number of advertisement events
app_assert_status(sc);
init = false;
}
// Generate data for advertising
sc = sl_bt_legacy_advertiser_generate_data(advertising_set_handle, sl_bt_advertiser_general_discoverable);
app_assert_status(sc);
// Start advertising and enable connections
sc = sl_bt_legacy_advertiser_start(advertising_set_handle, sl_bt_advertiser_connectable_scannable);
app_assert_status(sc);
Serial.print("Started advertising as '");
Serial.print(DEVICE_NAME);
Serial.print("' address: ");
// Print address in format 'FF:FF:FF:FF:FF:FF'
for (uint8_t i = (sizeof(bd_addr) - 1); i > 0; i--) {
Serial.print(ble_address.addr[i], HEX);
Serial.print(":");
}
Serial.println(ble_address.addr[0], HEX);
}
/******************************************************************************
* Initializes the GATT database
* Creates a new GATT session and adds certain services and characteristics
*****************************************************************************/
static void ble_initialize_gatt_db()
{
sl_status_t sc;
uint16_t gattdb_session_id;
uint16_t service;
uint16_t characteristic;
uint16_t descriptor;
// Create a new GATT database
sc = sl_bt_gattdb_new_session(&gattdb_session_id);
app_assert_status(sc);
// Generic access service
uint8_t generic_access_service_uuid[] = { 0x00, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
SL_BT_GATTDB_ADVERTISED_SERVICE,
2,
generic_access_service_uuid,
&service);
app_assert_status(sc);
// Device name characteristic
sl_bt_uuid_16_t device_name_uuid = { .data = { 0x00, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
(SL_BT_GATTDB_CHARACTERISTIC_READ | SL_BT_GATTDB_CHARACTERISTIC_WRITE),
0,
0,
device_name_uuid,
sl_bt_gattdb_fixed_length_value,
strlen(DEVICE_NAME),
strlen(DEVICE_NAME),
(uint8_t *)DEVICE_NAME,
&characteristic);
app_assert_status(sc);
// Appearance characteristic
sl_bt_uuid_16_t appearence_uuid = { .data = { 0x01, 0x2A } };
const uint8_t appearance_value[] = { 0xC2, 0x03 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
appearence_uuid,
sl_bt_gattdb_fixed_length_value,
2,
sizeof(appearance_value),
appearance_value,
&characteristic);
app_assert_status(sc);
// Generic access service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// Battery service
const uint8_t battery_service_uuid[] = { 0x0F, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
0,
sizeof(battery_service_uuid),
battery_service_uuid,
&service);
app_assert_status(sc);
// Battery level characteristic
const sl_bt_uuid_16_t battery_level_uuid = { .data = { 0x19, 0x2A } };
const uint8_t battery_level_init_value = 100;
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
battery_level_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(battery_level_init_value),
sizeof(battery_level_init_value),
&battery_level_init_value,
&characteristic);
app_assert_status(sc);
// Characteristic presentation format descriptor
const sl_bt_uuid_16_t chara_presentation_format_descriptor_uuid = { .data = { 0x04, 0x29 } };
const uint8_t chara_presentation_format_value[] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
SL_BT_GATTDB_DESCRIPTOR_READ,
0,
chara_presentation_format_descriptor_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(chara_presentation_format_value),
sizeof(chara_presentation_format_value),
chara_presentation_format_value,
&descriptor);
app_assert_status(sc);
// Client characteristic configuration descriptor
const sl_bt_uuid_16_t client_configuration_descriptor_uuid = { .data = { 0x02, 0x29 } };
const uint8_t client_configuration_value[] = { 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
(SL_BT_GATTDB_DESCRIPTOR_READ | SL_BT_GATTDB_DESCRIPTOR_WRITE),
0,
client_configuration_descriptor_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(client_configuration_value),
sizeof(client_configuration_value),
client_configuration_value,
&descriptor);
app_assert_status(sc);
// Battery service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// Device information service
const uint8_t device_info_service_uuid[] = { 0x0A, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
0,
sizeof(device_info_service_uuid),
device_info_service_uuid,
&service);
app_assert_status(sc);
// Manufacturer name string characteristic
const sl_bt_uuid_16_t manufacturer_uuid = { .data = { 0x29, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
manufacturer_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(manufacturer) - 1),
(sizeof(manufacturer) - 1),
manufacturer,
&characteristic);
app_assert_status(sc);
// Model number string characteristic
const sl_bt_uuid_16_t model_no_uuid = { .data = { 0x24, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
model_no_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(model_no) - 1),
(sizeof(model_no) - 1),
model_no,
&characteristic);
app_assert_status(sc);
// Serial number string characteristic
const sl_bt_uuid_16_t serial_no_uuid = { .data = { 0x25, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
serial_no_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(serial_no) - 1),
(sizeof(serial_no) - 1),
serial_no,
&characteristic);
app_assert_status(sc);
// Hardware revision string characteristic
const sl_bt_uuid_16_t hw_rev_uuid = { .data = { 0x27, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
hw_rev_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(hw_rev) - 1),
(sizeof(hw_rev) - 1),
hw_rev,
&characteristic);
app_assert_status(sc);
// Firmware revision string characteristic
const sl_bt_uuid_16_t fw_rev_uuid = { .data = { 0x26, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
fw_rev_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(fw_rev) - 1),
(sizeof(fw_rev) - 1),
fw_rev,
&characteristic);
app_assert_status(sc);
// Software revision string characteristic
const sl_bt_uuid_16_t sw_rev_uuid = { .data = { 0x28, 0x2A } };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
sw_rev_uuid,
sl_bt_gattdb_fixed_length_value,
(sizeof(sw_rev) - 1),
(sizeof(sw_rev) - 1),
sw_rev,
&characteristic);
app_assert_status(sc);
// System ID characteristic
const sl_bt_uuid_16_t sys_id_uuid = { .data = { 0x23, 0x2A } };
const uint8_t sys_id_initial_value[] = { 0x12, 0x34, 0x56, 0xFF, 0xFE, 0x9A, 0xBC, 0xDE };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
sys_id_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(sys_id_initial_value),
sizeof(sys_id_initial_value),
sys_id_initial_value,
&characteristic);
app_assert_status(sc);
// PnP ID characteristic
const sl_bt_uuid_16_t pnp_id_uuid = { .data = { 0x50, 0x2A } };
const uint8_t pnp_id_initial_value[] = { 0x02, 0x10, 0xC4, 0x00, 0x01, 0x00, 0x01 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
pnp_id_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(pnp_id_initial_value),
sizeof(pnp_id_initial_value),
pnp_id_initial_value,
&characteristic);
app_assert_status(sc);
// Device information service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// HID service
uint8_t hid_service_uuid[] = { 0x12, 0x18 };
sc = sl_bt_gattdb_add_service(gattdb_session_id,
sl_bt_gattdb_primary_service,
SL_BT_GATTDB_ADVERTISED_SERVICE,
2,
hid_service_uuid,
&service);
app_assert_status(sc);
// Protocol mode characteristic
sl_bt_uuid_16_t hid_protocol_mode_uuid = { .data = { 0x4E, 0x2A } };
const uint8_t hid_protocol_mode_init_value[] = { 1 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
(SL_BT_GATTDB_CHARACTERISTIC_READ | SL_BT_GATTDB_CHARACTERISTIC_WRITE_NO_RESPONSE),
0,
0,
hid_protocol_mode_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_protocol_mode_init_value),
sizeof(hid_protocol_mode_init_value),
hid_protocol_mode_init_value,
&characteristic);
app_assert_status(sc);
// HID report characteristic
const sl_bt_uuid_16_t hid_report_uuid = { .data = { 0x4D, 0x2A } };
const uint8_t hid_report_init_value[] = { 0x00, 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
(SL_BT_GATTDB_CHARACTERISTIC_READ | SL_BT_GATTDB_CHARACTERISTIC_WRITE | SL_BT_GATTDB_CHARACTERISTIC_NOTIFY),
0,
0,
hid_report_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_report_init_value),
sizeof(hid_report_init_value),
hid_report_init_value,
&characteristic);
app_assert_status(sc);
hid_report = characteristic;
// HID report reference descriptor
const sl_bt_uuid_16_t hid_report_reference_desc_uuid = { .data = { 0x08, 0x29 } };
const uint8_t hid_report_reference_desc_init_val[] = { 0x00, 0x01 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
SL_BT_GATTDB_DESCRIPTOR_READ,
SL_BT_GATTDB_ENCRYPTED_READ,
hid_report_reference_desc_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_report_reference_desc_init_val),
sizeof(hid_report_reference_desc_init_val),
hid_report_reference_desc_init_val,
&descriptor);
app_assert_status(sc);
// HID report map characteristic
const sl_bt_uuid_16_t hid_report_map_uuid = { .data = { 0x4B, 0x2A } };
const uint8_t hid_report_map_init_value[] = { 0x05, 0x01, // Usage page (Generic Desktop)
0x09, 0x02, // Usage (Mouse)
0xA1, 0x01, // Collection (Application)
0x09, 0x01, // UsageId (Pointer)
0xA1, 0x00, // Collection (Physical)
0x09, 0x30, // UsageId (x)
0x09, 0x31, // UsageId (y)
0x15, 0x80, // LogicalMinimum(-128)
0x25, 0x7F, // LogicalMaximum(127)
0x95, 0x02, // ReportCount(2)
0x75, 0x08, // ReportSize(8)
0x81, 0x06, // Input(Data, Variable, Relative, NoWrap, Linear, PreferredState, NoNullPosition, BitField)
0x05, 0x09, // UsagePage(Button)
0x19, 0x01, // UsageIdMin(Button 1)
0x29, 0x03, // UsageIdMax(Button 3)
0x15, 0x00, // LogicalMinimum(0)
0x25, 0x01, // LogicalMaximum(1)
0x95, 0x03, // ReportCount(3)
0x75, 0x01, // ReportSize(1)
0x81, 0x02, // Input(Data, Variable, Absolute, NoWrap, Linear, PreferredState, NoNullPosition, BitField)
0x95, 0x01, // ReportCount(1)
0x75, 0x05, // ReportSize(5)
0x81, 0x03, // Input(Constant, Variable, Absolute, NoWrap, Linear, PreferredState, NoNullPosition, BitField)
0xC0, // EndCollection()
0xC0 }; // EndCollection()
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
SL_BT_GATTDB_ENCRYPTED_READ,
0,
hid_report_map_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_report_map_init_value),
sizeof(hid_report_map_init_value),
hid_report_map_init_value,
&characteristic);
app_assert_status(sc);
// HID external report reference descriptor
const sl_bt_uuid_16_t hid_external_report_reference_descriptor_uuid = { .data = { 0x07, 0x29 } };
const uint8_t hid_external_report_reference_value[] = { 0x00, 0x00 };
sc = sl_bt_gattdb_add_uuid16_descriptor(gattdb_session_id,
characteristic,
SL_BT_GATTDB_DESCRIPTOR_READ,
0,
hid_external_report_reference_descriptor_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_external_report_reference_value),
sizeof(hid_external_report_reference_value),
hid_external_report_reference_value,
&descriptor);
app_assert_status(sc);
// HID information characteristic
const sl_bt_uuid_16_t hid_info_uuid = { .data = { 0x4A, 0x2A } };
const uint8_t hid_info_init_value[] = { 0x01, 0x11, 0x00, 0x02 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_READ,
0,
0,
hid_info_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_info_init_value),
sizeof(hid_info_init_value),
hid_info_init_value,
&characteristic);
app_assert_status(sc);
// HID control point characteristic
const sl_bt_uuid_16_t hid_control_point_uuid = { .data = { 0x4C, 0x2A } };
const uint8_t hid_control_point_init_value[] = { 0x00 };
sc = sl_bt_gattdb_add_uuid16_characteristic(gattdb_session_id,
service,
SL_BT_GATTDB_CHARACTERISTIC_WRITE_NO_RESPONSE,
0,
0,
hid_control_point_uuid,
sl_bt_gattdb_fixed_length_value,
sizeof(hid_control_point_init_value),
sizeof(hid_control_point_init_value),
hid_control_point_init_value,
&characteristic);
app_assert_status(sc);
// HID service start
sc = sl_bt_gattdb_start_service(gattdb_session_id, service);
app_assert_status(sc);
// Commit the GATT DB changes
sc = sl_bt_gattdb_commit(gattdb_session_id);
app_assert_status(sc);
}
#ifndef BLE_STACK_SILABS
#error "This example is only compatible with the Silicon Labs BLE stack. Please select 'BLE (Silabs)' in 'Tools > Protocol stack'."
#endif
結果チャート
拡張ボードのボタンを押すと、マウスイベントがトリガーされることが確認できます!
XIAO MG24 Sense マイクロフォン(Seeed Studio デモ)
内蔵センサーの概要
マイクロフォンセンサーであるMSM381ACT001のようなセンサーは、高感度・低ノイズでオーディオ信号をキャプチャするように設計されたMEMS(Micro-Electro-Mechanical Systems)マイクロフォンです。具体的に、MSM381ACT001は以下の特徴を持っています:
マイクロフォン機能:
- 音波をキャプチャして電気信号に変換し、様々な環境でのオーディオ入力の検出を可能にします。
- 通常20 Hzから20 kHzまでの広い周波数応答範囲を特徴とし、音声認識や音楽再生を含む様々なオーディオアプリケーションに適しています。
主要な特徴
- 高感度:微細な音を検出する能力があり、精密なオーディオキャプチャが必要なアプリケーションに最適です。
- 低ノイズ:高い信号対雑音比(SNR)を提供するように設計されており、騒音の多い環境でも明瞭なオーディオ出力を保証します。
- コンパクトサイズ:MEMS技術により小型フォームファクターを実現し、スマートフォンやウェアラブルデバイスなどのポータブルデバイスへの統合を容易にします。
- デジタル出力:デジタル信号出力オプション(例:I2S)を提供し、デジタル信号プロセッサ(DSP)やマイクロコントローラとのインターフェースを簡素化します。
ソフトウェア準備
GitHubダウンロードリンクをクリックして、マイクロフォンセンサーを駆動します。
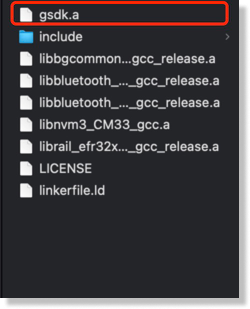
現在、手動でファイルの置き換え修正を行う必要があります。後続の直接ダウンロードライブラリが使用可能になりましたら、Wikiの更新をお待ちください。
- [置き換えファイル] gsdk.a
ファイルパスの変更
- /Users/yourname/Library/Arduino15/packages/SiliconLabs/hardware/silabs/2.2.0/variants/xiao_mg24/ble_silabs/
コード実装
#include <mic.h>
#if defined(WIO_TERMINAL)
#include "processing/filters.h"
#endif
// Settings
#if defined(WIO_TERMINAL)
#define DEBUG 1 // Enable pin pulse during ISR
#define SAMPLES 16000*3
#elif defined(ARDUINO_ARCH_NRF52840)
#define DEBUG 1 // Enable pin pulse during ISR
#define SAMPLES 800
#elif defined(ARDUINO_SILABS)
#define DEBUG 1 // Enable pin pulse during ISR
#define SAMPLES 800
#endif
mic_config_t mic_config{
.channel_cnt = 1,
.sampling_rate = 16000,
.buf_size = 1600,
#if defined(WIO_TERMINAL)
.debug_pin = 1 // Toggles each DAC ISR (if DEBUG is set to 1)
#elif defined(ARDUINO_ARCH_NRF52840)
.debug_pin = LED_BUILTIN // Toggles each DAC ISR (if DEBUG is set to 1)
#elif defined(ARDUINO_SILABS)
.debug_pin = LED_BUILTIN // Toggles each DAC ISR (if DEBUG is set to 1)
#endif
};
#if defined(WIO_TERMINAL)
DMA_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_ARCH_NRF52840)
NRF52840_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_SILABS)
MG24_ADC_Class Mic(&mic_config);
#endif
int16_t recording_buf[SAMPLES];
volatile uint8_t recording = 0;
volatile static bool record_ready = false;
#if defined(WIO_TERMINAL)
FilterBuHp filter;
#endif
void setup() {
Serial.begin(115200);
while (!Serial) {delay(10);}
#if defined(WIO_TERMINAL)
pinMode(WIO_KEY_A, INPUT_PULLUP);
#endif
Mic.set_callback(audio_rec_callback);
if (!Mic.begin()) {
Serial.println("Mic initialization failed");
while (1);
}
Serial.println("Mic initialization done.");
}
void loop() {
#if defined(WIO_TERMINAL)
if (digitalRead(WIO_KEY_A) == LOW && !recording) {
Serial.println("Starting sampling");
recording = 1;
record_ready = false;
}
#endif
#if defined(WIO_TERMINAL)
if (!recording && record_ready)
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
if (record_ready)
#endif
{
Serial.println("Finished sampling");
for (int i = 0; i < SAMPLES; i++) {
//int16_t sample = filter.step(recording_buf[i]);
int16_t sample = recording_buf[i];
Serial.println(sample);
}
record_ready = false;
}
}
static void audio_rec_callback(uint16_t *buf, uint32_t buf_len) {
static uint32_t idx = 0;
// Copy samples from DMA buffer to inference buffer
#if defined(WIO_TERMINAL)
if (recording)
#endif
{
for (uint32_t i = 0; i < buf_len; i++) {
// Convert 12-bit unsigned ADC value to 16-bit PCM (signed) audio value
#if defined(WIO_TERMINAL)
recording_buf[idx++] = filter.step((int16_t)(buf[i] - 1024) * 16);
//recording_buf[idx++] = (int16_t)(buf[i] - 1024) * 16;
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
recording_buf[idx++] = buf[i];
#endif
if (idx >= SAMPLES){
idx = 0;
recording = 0;
record_ready = true;
break;
}
}
}
}
機能概要
マイクロフォン設定
mic_config_t mic_config{
.channel_cnt = 1,
.sampling_rate = 16000,
.buf_size = 1600,
#if defined(WIO_TERMINAL)
.debug_pin = 1
#elif defined(ARDUINO_ARCH_NRF52840)
.debug_pin = LED_BUILTIN
#elif defined(ARDUINO_SILABS)
.debug_pin = LED_BUILTIN
#endif
};
- mic_config_t: マイクロフォン設定構造体を定義します。
- channel_cnt: モノラルの場合は1に設定します。
- sampling_rate: サンプリング周波数を16000 Hzに設定します。
- buf_size: バッファサイズを1600に設定します。
- debug_pin: プラットフォームに応じてデバッグピンを設定し、デバッグ中の信号表示に使用します。
マイクロフォンのインスタンス化
#if defined(WIO_TERMINAL)
DMA_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_ARCH_NRF52840)
NRF52840_ADC_Class Mic(&mic_config);
#elif defined(ARDUINO_SILABS)
MG24_ADC_Class Mic(&mic_config);
#endif
- 条件付きコンパイル:事前に定義された設定を使用して、異なるプラットフォーム用の適切なマイクロフォンクラスインスタンスを作成します。
録音バッファとフラグ
int16_t recording_buf[SAMPLES];
volatile uint8_t recording = 0;
volatile static bool record_ready = false;
- recording_buf: 録音サンプルを格納するSAMPLESの配列を定義します。
- recording: 現在録音が進行中かどうかを示すvolatile変数で、コンパイラの最適化を防ぎます。
- record_ready: 録音が完了し、さらなる処理の準備ができているかどうかを示すvolatile static変数です。
フィルター例(WIO Terminal用)
#if defined(WIO_TERMINAL)
FilterBuHp filter;
#endif
- WIO Terminalの場合、フィルタ処理用のハイパスフィルタのインスタンスを作成します。
setup
void setup() {
Serial.begin(115200);
while (!Serial) {delay(10);}
#if defined(WIO_TERMINAL)
pinMode(WIO_KEY_A, INPUT_PULLUP);
#endif
Mic.set_callback(audio_rec_callback);
if (!Mic.begin()) {
Serial.println("Mic initialization failed");
while (1);
}
Serial.println("Mic initialization done.");
}
-
シリアルポートの初期化:115200ボーレートでシリアル通信を開始し、シリアルポートの準備完了を待機します。
-
ピンモードの設定:WIO Terminalで、キーピンを入力プルアップモードに設定します。
-
コールバック関数の設定:Mic.set_callback(audio_rec_callback)を呼び出して、音声録音時のコールバック関数を指定します。
-
マイクの初期化:Mic.begin()を呼び出し、初期化に失敗した場合はエラーメッセージを出力して無限ループに入ります。
loop
void loop() {
#if defined(WIO_TERMINAL)
if (digitalRead(WIO_KEY_A) == LOW && !recording) {
Serial.println("Starting sampling");
recording = 1;
record_ready = false;
}
#endif
#if defined(WIO_TERMINAL)
if (!recording && record_ready)
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
if (record_ready)
#endif
{
Serial.println("Finished sampling");
for (int i = 0; i < SAMPLES; i++) {
int16_t sample = recording_buf[i];
Serial.println(sample);
}
record_ready = false;
}
}
- キー検出:WIO Terminalで、キーが押されたことを検出し、録音中でない場合に録音を開始します。
- サンプリング完了:録音中でなく、record_readyがtrueに設定されている場合、「Finished sampling」を出力します。
- 録音バッファを反復処理し、各サンプル値を出力します。
音声録音コールバック関数
static void audio_rec_callback(uint16_t *buf, uint32_t buf_len) {
static uint32_t idx = 0;
#if defined(WIO_TERMINAL)
if (recording)
#endif
{
for (uint32_t i = 0; i < buf_len; i++) {
#if defined(WIO_TERMINAL)
recording_buf[idx++] = filter.step((int16_t)(buf[i] - 1024) * 16);
#elif defined(ARDUINO_ARCH_NRF52840) || defined(ARDUINO_SILABS)
recording_buf[idx++] = buf[i];
#endif
if (idx >= SAMPLES){
idx = 0;
recording = 0;
record_ready = true;
break;
}
}
}
}
- コールバック関数:音声録音中に呼び出され、DMAバッファから録音バッファへのサンプルのコピーを担当します。
- 条件付きコンパイル:WIO Terminal上の場合、フィルターを使用して入力を処理します。
- 12ビット符号なしADC値を16ビットPCM(符号付き)音声値に変換します。
- サンプル充填:サンプルをrecording_bufにコピーし、インデックスidxを更新します。
- 録音終了:充填されたサンプル数がSAMPLESに達すると、インデックスをリセットし、録音の終了をマークしてrecord_readyをtrueに設定します。
結果チャート
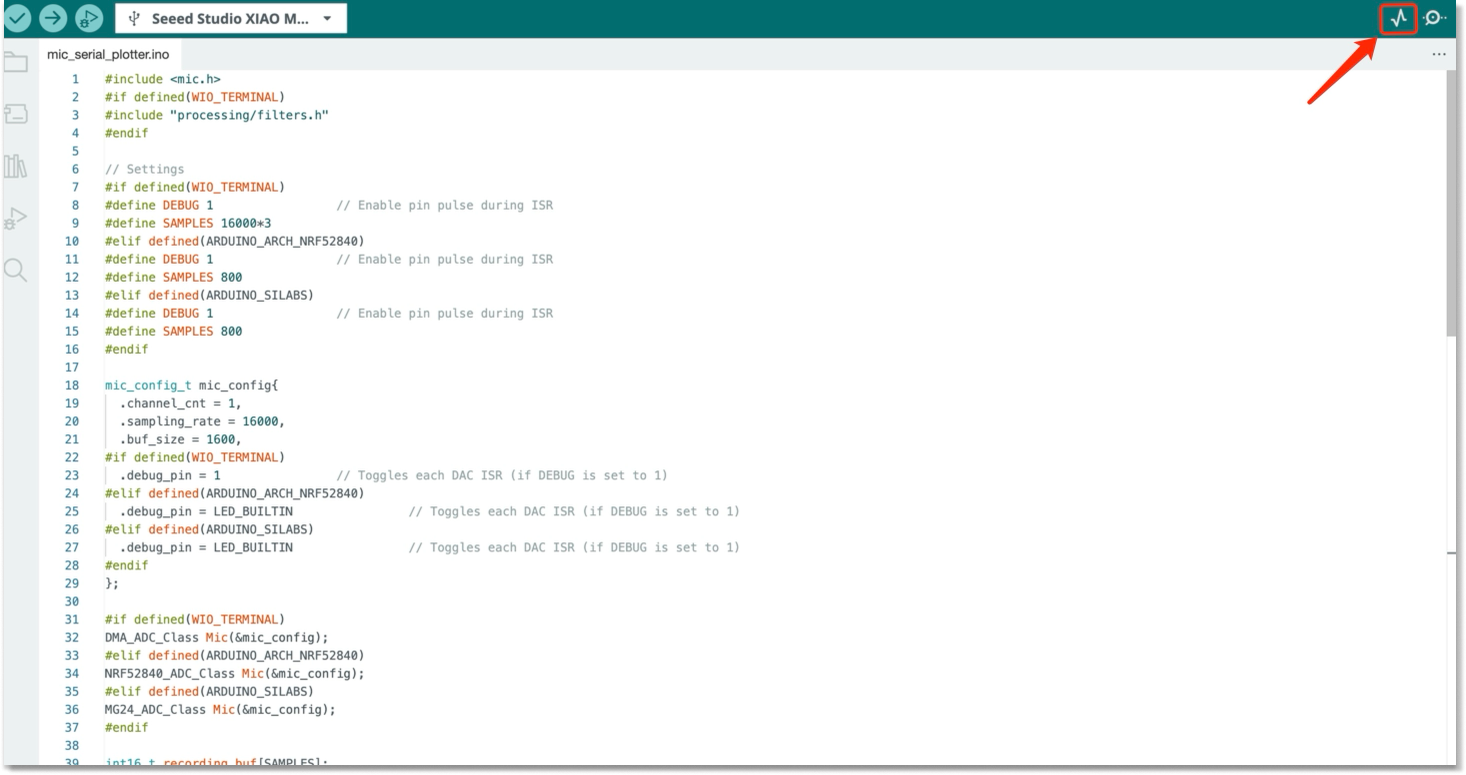
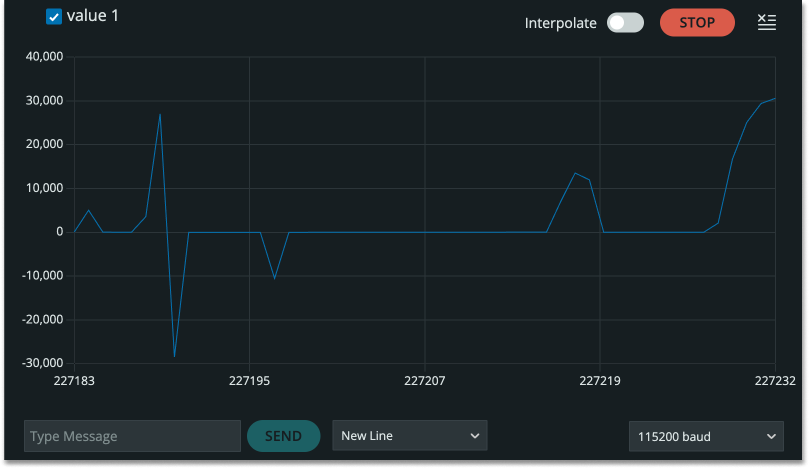
これは認識された音の波形です。息を吹きかけると、波形の振動振幅が大きくなることがはっきりと確認できます。
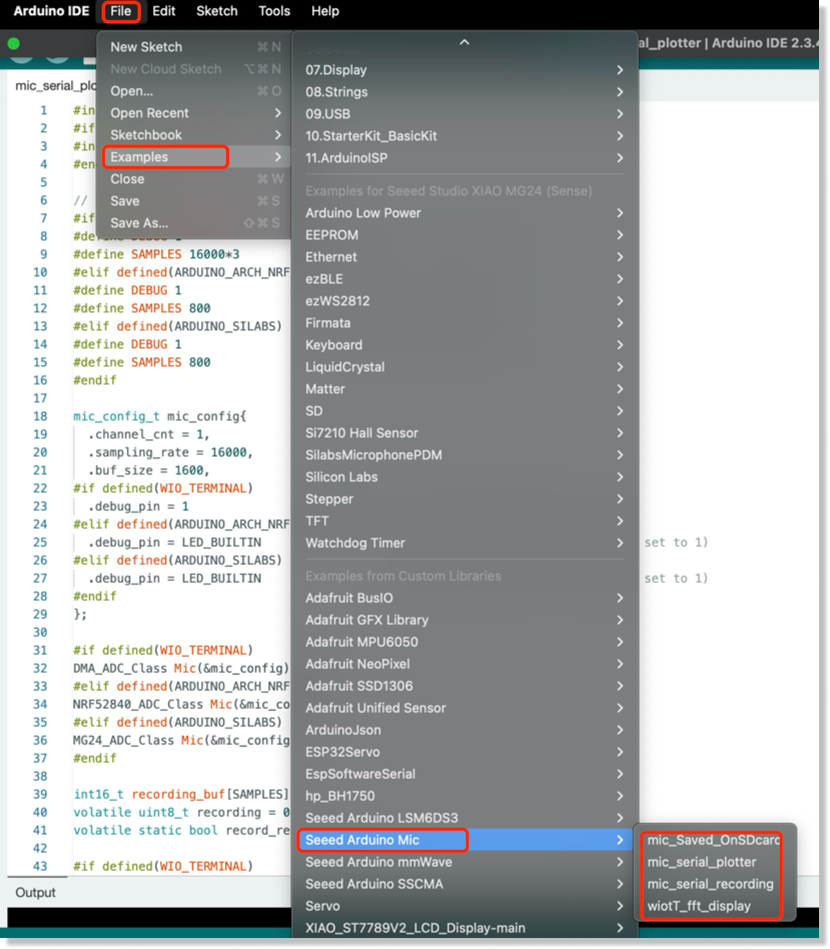
より多くの例
より多くのサンプルコードが必要な場合は、こちらをクリックしてください:-> "Example -> Seeed Arduino Mic"
XIAO MG24 Sense マイクロフォン(Silicon Labs デモ)
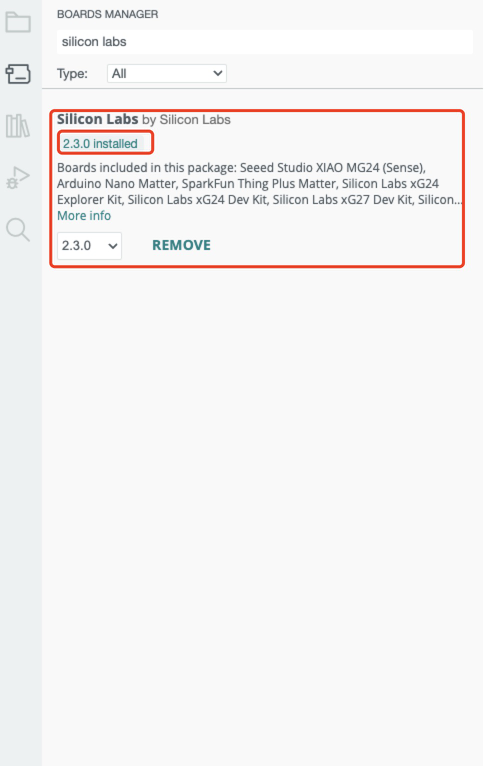
例の中で最新の公式コードを見つけるために、最新のオンボードパッケージ(2.3.0)をダウンロードする必要があります
ソフトウェア準備
コード実装
/*
Analog microphone volume example
The example showcases the usage of analog MEMS microphones and dims the
on-board LED based on the microphone's input volume.
This example is compatible with all Silicon Labs Arduino boards, however
it requires an analog microphone on-board or connected to the specified pin.
Author: Áron Gyapjas (Silicon Labs)
*/
#include <SilabsMicrophoneAnalog.h>
// This configuration is for the MSM381ACT001 microphone on the Seeed Studio XIAO MG24
// Change it according to your hardware
#define MIC_DATA_PIN PC9
#define MIC_PWR_PIN PC8
#define NUM_SAMPLES 128
#define MIC_VALUE_MIN 735
#define MIC_VALUE_MAX 900
// Buffers for storing samples
uint32_t mic_buffer[NUM_SAMPLES];
uint32_t mic_buffer_local[NUM_SAMPLES];
volatile bool data_ready_flag = false;
MicrophoneAnalog micAnalog(MIC_DATA_PIN, MIC_PWR_PIN);
void mic_samples_ready_cb();
void calculate_and_display_voice_level();
void setup()
{
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
micAnalog.begin(mic_buffer, NUM_SAMPLES);
Serial.println("Microphone initialized...");
micAnalog.startSampling(mic_samples_ready_cb);
Serial.println("Sampling started...");
}
void loop()
{
if (data_ready_flag) {
data_ready_flag = false;
calculate_and_display_voice_level();
}
}
// Called when the requested amount of samples are available from the microphone
void mic_samples_ready_cb()
{
// Copy data to the local buffer in order to prevent it from overwriting
memcpy(mic_buffer_local, mic_buffer, NUM_SAMPLES * sizeof(uint32_t));
data_ready_flag = true;
}
void calculate_and_display_voice_level() {
// Rolling average for smoothing the voice level
static uint32_t rolling_average = 0u;
// Stop sampling in order to prevent overwriting the current data
micAnalog.stopSampling();
// Get the average of the sampled values
uint32_t voice_level = (uint32_t)micAnalog.getAverage(mic_buffer_local, NUM_SAMPLES);
// Adjust the voice level relative to minimum/maximum of the microphone's output
voice_level = constrain(voice_level, MIC_VALUE_MIN, MIC_VALUE_MAX);
// Calculate the rolling average
rolling_average = (voice_level + rolling_average) / 2;
// Map the current average level to brightness
int brightness = map(rolling_average, MIC_VALUE_MIN, MIC_VALUE_MAX, 0, 255);
if (LED_BUILTIN_ACTIVE == LOW) {
analogWrite(LED_BUILTIN, 255 - brightness);
} else {
analogWrite(LED_BUILTIN, brightness);
}
// Print the average voice level (you can use the Serial Plotter to view this value on a graph)
Serial.println(rolling_average);
// Restart sampling
micAnalog.startSampling(mic_samples_ready_cb);
}
機能概要
ヘッダーファイルの紹介
#include <SilabsMicrophoneAnalog.h>
- アナログマイクロフォンを使用するために必要なライブラリ関数と定義を含む
SilabsMicrophoneAnalog.hヘッダーファイルをインクルードします。
ハードウェア構成
#define MIC_DATA_PIN PC9
#define MIC_PWR_PIN PC8
#define NUM_SAMPLES 128
#define MIC_VALUE_MIN 735
#define MIC_VALUE_MAX 900
-
MIC_DATA_PIN: マイクロフォンのデータピンをPC9として定義します。 -
MIC_PWR_PIN: マイクロフォンの電源ピンをPC8として定義します。 -
NUM_SAMPLES: サンプリングあたりのサンプル数を128として定義します。 -
MIC_VALUE_MINとMIC_VALUE_MAX: マイクロフォン出力の最小値と最大値の範囲を定義します。
バッファ定義
uint32_t mic_buffer[NUM_SAMPLES];
uint32_t mic_buffer_local[NUM_SAMPLES];
-
mic_buffer: マイクから収集された生のサンプルデータを格納するために使用されます。 -
mic_buffer_local: サンプルデータを一時的に格納して上書きを防ぐために使用されます。
フラグとオブジェクトの定義
volatile bool data_ready_flag = false;
MicrophoneAnalog micAnalog(MIC_DATA_PIN, MIC_PWR_PIN);
-
data_ready_flag: 新しいサンプルデータが準備完了かどうかを示すフラグ。 -
micAnalog: マイクロフォンを制御するためのMicrophoneAnalogオブジェクトを作成します。
コールバック関数の宣言
void mic_samples_ready_cb();
void calculate_and_display_voice_level();
-
mic_samples_ready_cb(): サンプリングが完了したときに呼び出されるコールバック関数。 -
calculate_and_display_voice_level(): 音量を計算してLEDの明るさを制御する関数。
setup() 関数
void setup()
{
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
micAnalog.begin(mic_buffer, NUM_SAMPLES);
Serial.println("Microphone initialized...");
micAnalog.startSampling(mic_samples_ready_cb);
Serial.println("Sampling started...");
}
-
ボーレート115200でシリアル通信を初期化します。
-
オンボードLEDピンを出力モードに設定します。
-
マイクロフォンを初期化し、サンプルバッファを指定します。
-
サンプリングを開始し、サンプリング完了時のコールバック関数を設定します。
loop()関数
void loop()
{
if (data_ready_flag) {
data_ready_flag = false;
calculate_and_display_voice_level();
}
}
-
data_ready_flagがtrueかどうかをチェックし、新しいデータが準備できていることを示します。 -
新しいデータが利用可能な場合、
calculate_and_display_voice_level()関数を呼び出してデータを処理します。
void mic_samples_ready_cb()
{
memcpy(mic_buffer_local, mic_buffer, NUM_SAMPLES * sizeof(uint32_t));
data_ready_flag = true;
}
mic_bufferからサンプルデータをmic_buffer_localにコピーして、上書きを防ぎます。
新しいデータが準備完了したことを示すためにdata_ready_flagをtrueに設定します。
void calculate_and_display_voice_level() {
static uint32_t rolling_average = 0u;
micAnalog.stopSampling();
uint32_t voice_level = (uint32_t)micAnalog.getAverage(mic_buffer_local, NUM_SAMPLES);
voice_level = constrain(voice_level, MIC_VALUE_MIN, MIC_VALUE_MAX);
rolling_average = (voice_level + rolling_average) / 2;
int brightness = map(rolling_average, MIC_VALUE_MIN, MIC_VALUE_MAX, 0, 255);
if (LED_BUILTIN_ACTIVE == LOW) {
analogWrite(LED_BUILTIN, 255 - brightness);
} else {
analogWrite(LED_BUILTIN, brightness);
}
Serial.println(rolling_average);
micAnalog.startSampling(mic_samples_ready_cb);
}
-
データの上書きを防ぐためにサンプリングを停止します。
-
サンプルデータの平均を計算し、
MIC_VALUE_MINとMIC_VALUE_MAXの間に制約します。 -
音量変化を滑らかにするために移動平均を計算します。
-
移動平均をLEDの明度範囲(0から255)にマッピングし、LEDの明度を調整します。
-
音量変化を観察するために移動平均をシリアル経由で出力します。
-
新しいオーディオデータを収集するためにサンプリングを再開します。
結果チャート
マイクに息を吹きかけると、上部のLEDが音に合わせて明るくなったり暗くなったりするのが確認できます。
より詳しく
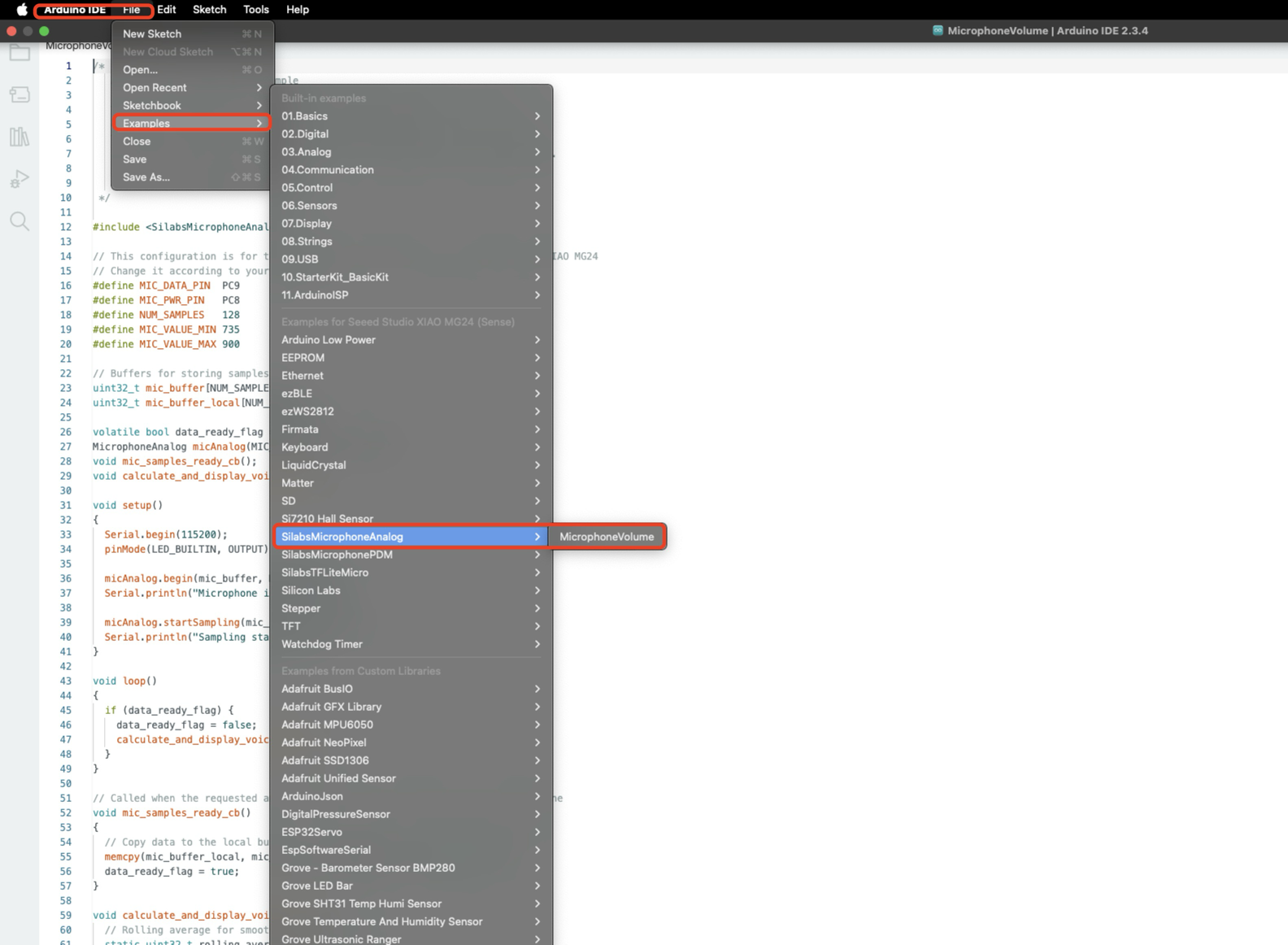
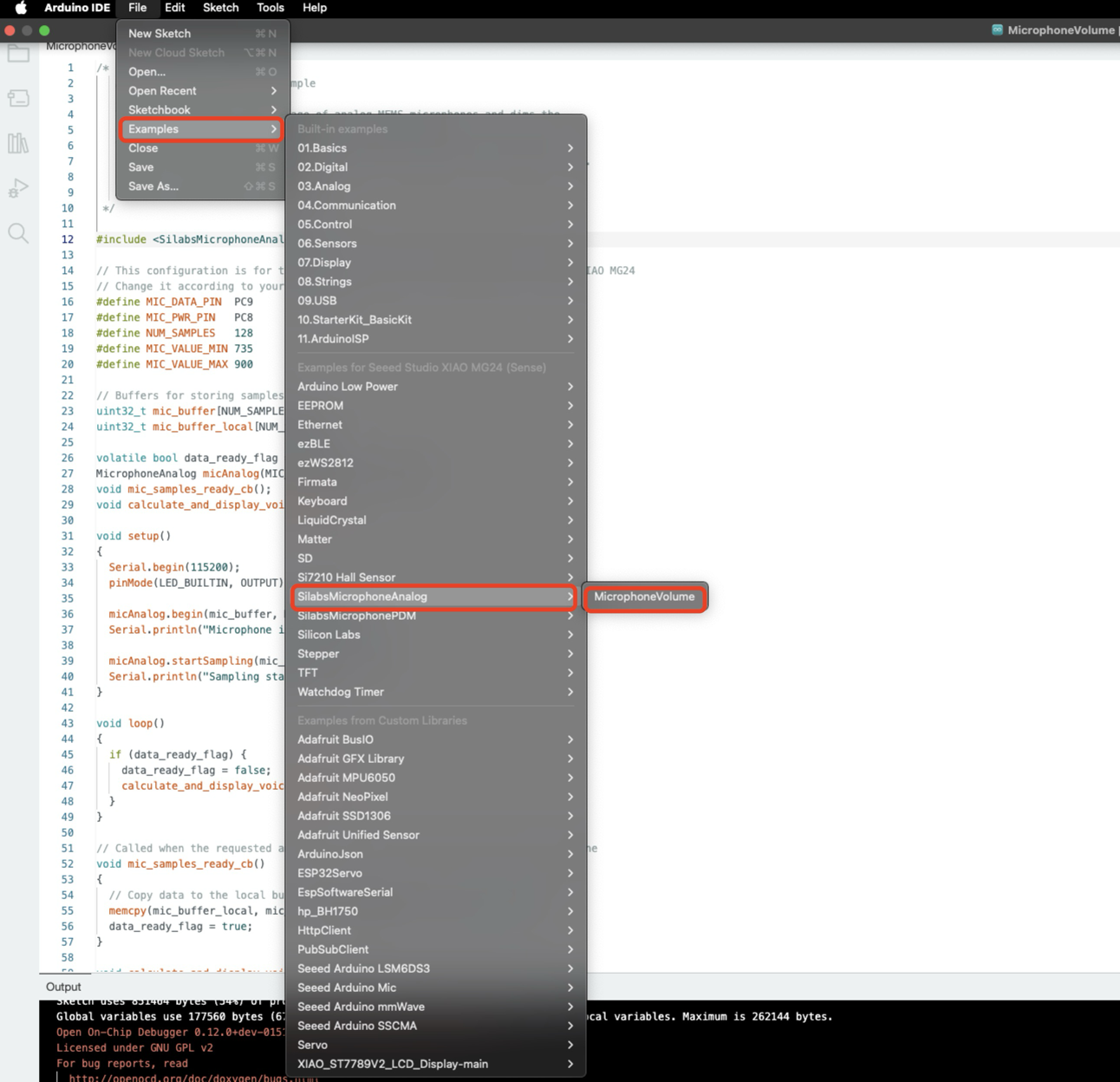
より多くのサンプルコードが必要な場合は、こちらをクリックしてください:-> "Example -> SilabsMicrophoneAnalog -> MicrophoneVolume"
リソース
Seeed Studio XIAO MG24 Sense用
- 📄 [PDF] Seeed Studio 6軸IMU(LSM6DS3TR-C) データシート
- 📄 [PDF] Seeed Studio アナログマイクロフォン(MSM381ACT001) データシート
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。