Seeed Studio XIAO nRF54L15 Sense BLE使用方法
以下のサンプルコードはPlatformIO用に設計されていますが、nRF Connect SDKとも互換性があります。
VS Codeベースで、nRF Connect SDKで以下のケースを使用したい場合は、提供されたリンクを参照して、app.overlayファイルを追加し、prj.confの内容を変更してください。
BLE Observer
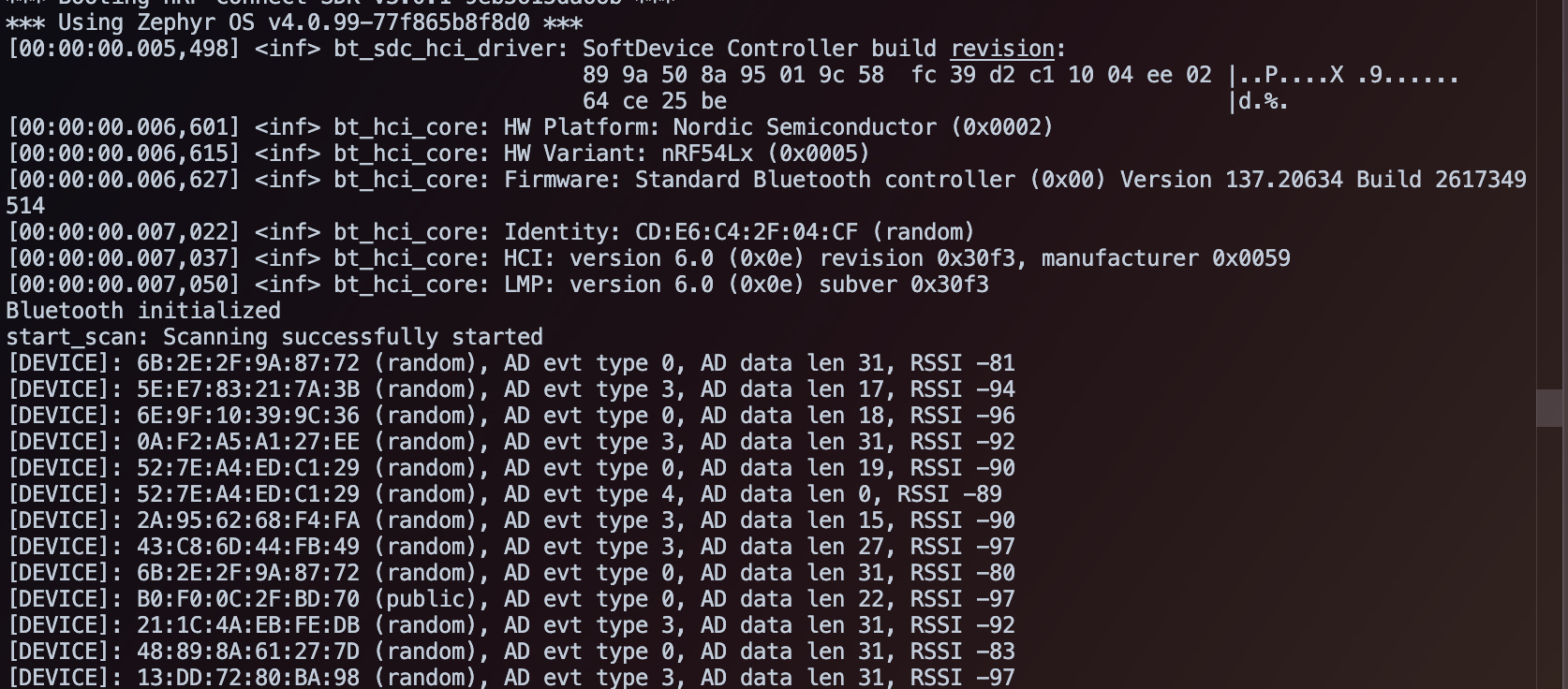
Bluetooth Low Energy Observerロール機能を実演するシンプルなアプリケーションです。アプリケーションは定期的に近くのデバイスをスキャンします。デバイスが見つかった場合、デバイスのアドレス、RSSI値、アドバタイジングタイプ、アドバタイジングデータ長をコンソールに出力します。
使用するBluetooth Low Energy ControllerがExtended Scanningをサポートしている場合、プロジェクト設定ファイルprj.confでCONFIG_BT_EXT_ADVを有効にできます。詳細については、プロジェクト設定ファイルを参照してください。
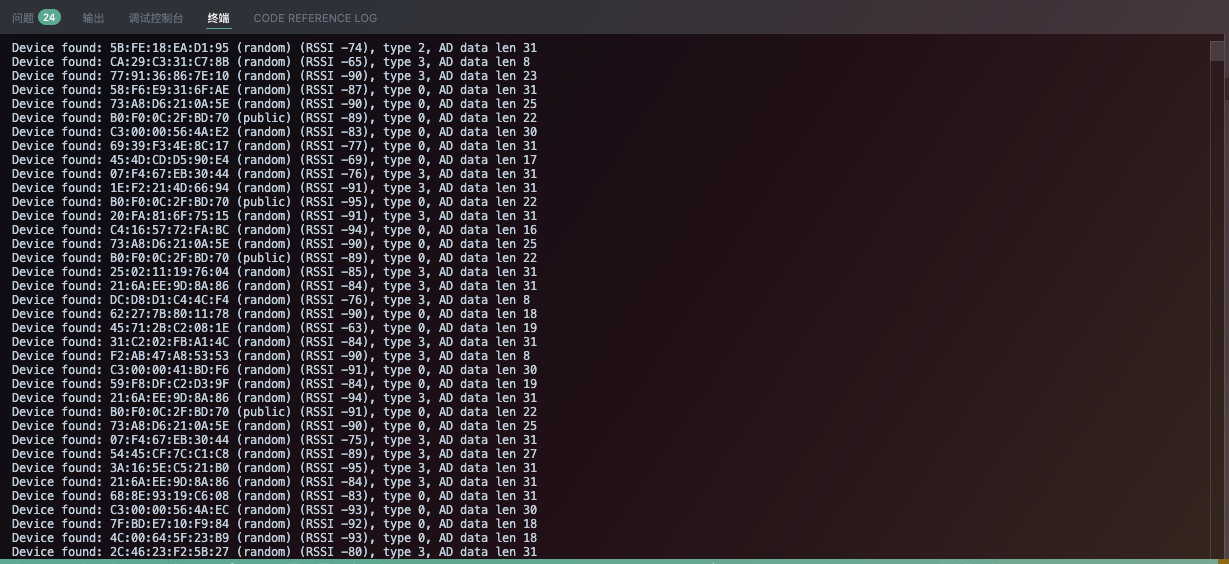
スキャン結果
XIAO nRF54L15ボードの追加
XIAO nRF54L15(Sense)ボードをNCS(nRF Connect SDK)に追加するには、Seeed Studio Wikiの「Getting Started」ガイドを参照してください。このガイドでは、プロセスの詳細な手順を提供します。
BLE Observerコード
Main.c
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
int observer_start(void);
int main(void)
{
int err;
printk("Starting Observer Demo\n");
err = bt_enable(NULL);
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
return 0;
}
(void)observer_start();
printk("Exiting %s thread.\n", __func__);
return 0;
}
-
main.c:Bluetoothサブシステムを初期化し、observerデモを開始します。 -
bt_enable(NULL):Bluetoothサブシステムを初期化します。 -
observer_start():observerを開始する関数を呼び出します。 -
printk("Exiting %s thread.\n", __func__):main関数が終了する際にメッセージを出力します。
observer.c
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/hci.h>
#define NAME_LEN 30
static void device_found(const bt_addr_le_t *addr, int8_t rssi, uint8_t type,
struct net_buf_simple *ad)
{
char addr_str[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(addr, addr_str, sizeof(addr_str));
printk("Device found: %s (RSSI %d), type %u, AD data len %u\n",
addr_str, rssi, type, ad->len);
}
#if defined(CONFIG_BT_EXT_ADV)
static bool data_cb(struct bt_data *data, void *user_data)
{
char *name = user_data;
uint8_t len;
switch (data->type) {
case BT_DATA_NAME_SHORTENED:
case BT_DATA_NAME_COMPLETE:
len = MIN(data->data_len, NAME_LEN - 1);
(void)memcpy(name, data->data, len);
name[len] = '\0';
return false;
default:
return true;
}
}
static const char *phy2str(uint8_t phy)
{
switch (phy) {
case BT_GAP_LE_PHY_NONE: return "No packets";
case BT_GAP_LE_PHY_1M: return "LE 1M";
case BT_GAP_LE_PHY_2M: return "LE 2M";
case BT_GAP_LE_PHY_CODED: return "LE Coded";
default: return "Unknown";
}
}
static void scan_recv(const struct bt_le_scan_recv_info *info,
struct net_buf_simple *buf)
{
char le_addr[BT_ADDR_LE_STR_LEN];
char name[NAME_LEN];
uint8_t data_status;
uint16_t data_len;
(void)memset(name, 0, sizeof(name));
data_len = buf->len;
bt_data_parse(buf, data_cb, name);
data_status = BT_HCI_LE_ADV_EVT_TYPE_DATA_STATUS(info->adv_props);
bt_addr_le_to_str(info->addr, le_addr, sizeof(le_addr));
printk("[DEVICE]: %s, AD evt type %u, Tx Pwr: %i, RSSI %i "
"Data status: %u, AD data len: %u Name: %s "
"C:%u S:%u D:%u SR:%u E:%u Pri PHY: %s, Sec PHY: %s, "
"Interval: 0x%04x (%u ms), SID: %u\n",
le_addr, info->adv_type, info->tx_power, info->rssi,
data_status, data_len, name,
(info->adv_props & BT_GAP_ADV_PROP_CONNECTABLE) != 0,
(info->adv_props & BT_GAP_ADV_PROP_SCANNABLE) != 0,
(info->adv_props & BT_GAP_ADV_PROP_DIRECTED) != 0,
(info->adv_props & BT_GAP_ADV_PROP_SCAN_RESPONSE) != 0,
(info->adv_props & BT_GAP_ADV_PROP_EXT_ADV) != 0,
phy2str(info->primary_phy), phy2str(info->secondary_phy),
info->interval, info->interval * 5 / 4, info->sid);
}
static struct bt_le_scan_cb scan_callbacks = {
.recv = scan_recv,
};
#endif /* CONFIG_BT_EXT_ADV */
int observer_start(void)
{
struct bt_le_scan_param scan_param = {
.type = BT_LE_SCAN_TYPE_PASSIVE,
.options = BT_LE_SCAN_OPT_FILTER_DUPLICATE,
.interval = BT_GAP_SCAN_FAST_INTERVAL,
.window = BT_GAP_SCAN_FAST_WINDOW,
};
int err;
#if defined(CONFIG_BT_EXT_ADV)
bt_le_scan_cb_register(&scan_callbacks);
printk("Registered scan callbacks\n");
#endif /* CONFIG_BT_EXT_ADV */
err = bt_le_scan_start(&scan_param, device_found);
if (err) {
printk("Start scanning failed (err %d)\n", err);
return err;
}
printk("Started scanning...\n");
return 0;
}
-
device_found:スキャン中にデバイスが見つかった際に呼び出されるコールバック関数です。デバイスのアドレス、RSSI、タイプ、ADデータ長を出力します。 -
scan_recv:拡張アドバタイジング用のコールバック関数で、受信したアドバタイジングパケットの詳細情報(デバイスアドレス、Tx電力、RSSI、アドバタイジングデータ)を出力します。 -
data_cb:bt_data_parseで使用されるコールバック関数で、アドバタイジングデータからデバイス名を抽出します。短縮名と完全名の両方を処理します。 -
phy2str:PHY(物理層)値を人間が読める文字列(例:「LE 1M」、「LE 2M」など)に変換するヘルパー関数です。 -
observer_start:observerを開始するメイン関数です。スキャンパラメータを定義し、スキャンプロセスを開始します。 -
bt_le_scan_start:指定されたパラメータとデバイスが見つかった際のコールバック関数でBLEスキャンを開始する関数です。
BLE Advertising
このBluetoothアドバタイジングチュートリアルは、Nordic Connect SDKで動作するように変更された公式サンプルコードに基づいています。開発ボードと公式ドキュメントを組み合わせることで、より多くのBluetoothアプリケーションに取り組むことができます。
スマートフォンがXIAO nRF54L15に接続されていない間、オンボードインジケータは常時点灯したままです。スマートフォンが正常に接続されると、インジケータが点滅を開始し、接続が確立されたことを示します。
携帯電話接続 XIAO nRF54L15
BLE Advertisingソフトウェアのインストール
この例では、携帯電話に公式BluetoothテストアプリであるnRF Connectをダウンロードする必要があります。
XIAO nRF54L15 Senseボードにプログラムをフラッシュした後、nRF Connectアプリのメインページを開いて操作できます。
-
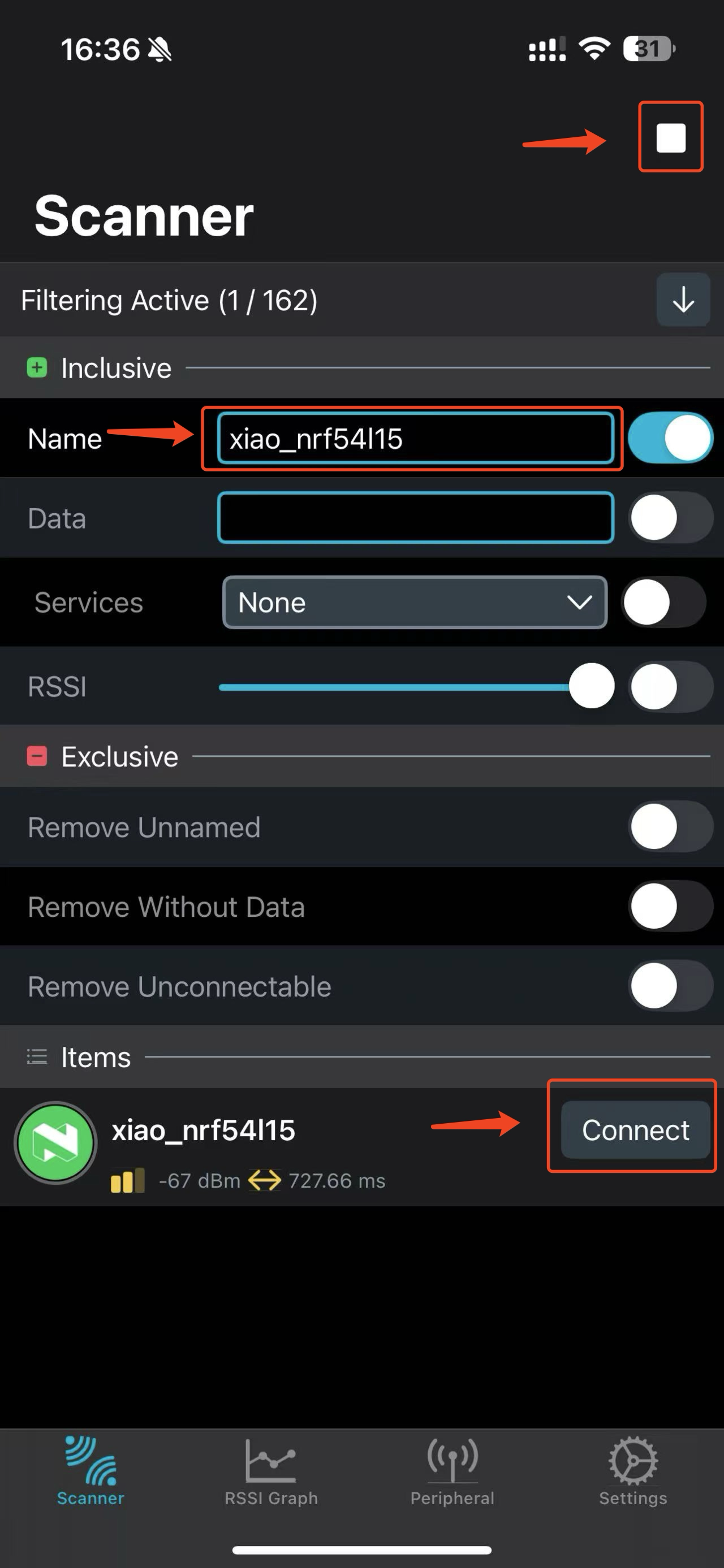
ステップ1. nRF Connectアプリで、右上角のスキャンボタンをクリックしてBluetoothデバイスのスキャンを開始します。
-
ステップ2. 次に、XIAO nRF54L15 Senseデバイスの名前を「Name」フィールドに入力します。これにより、デバイスをフィルタリングして素早く見つけることができます。
-
ステップ3. スキャン結果エリアで、XIAO nRF54L15 Senseデバイスを見つけて、その横にある「Connect」ボタンをクリックします。
接続が成功すると、デバイス詳細ページに移動します。このページでは、異なる時間帯におけるBluetooth信号強度(RSSI)の分布を観察でき、デバイス接続の安定性を理解するのに役立ちます。
 | 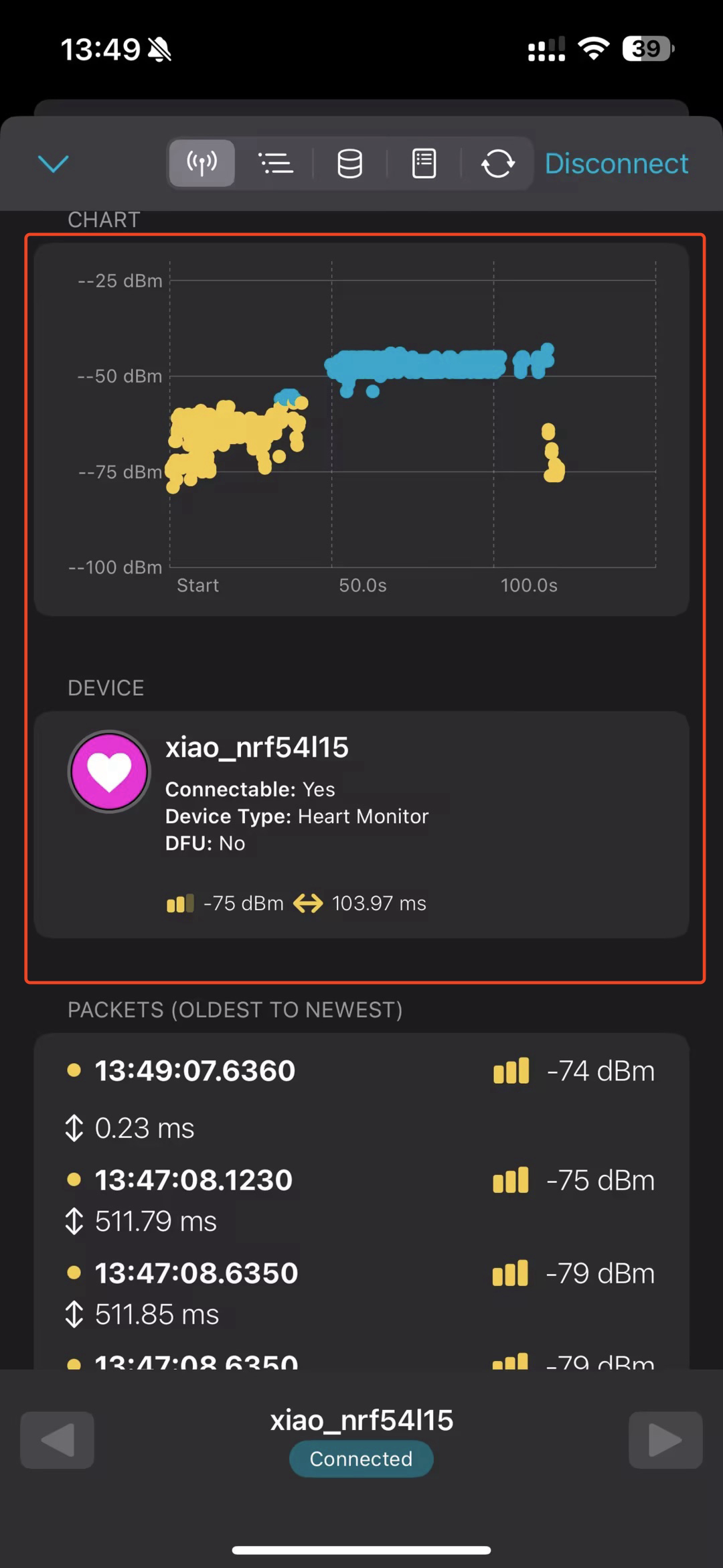 |
XIAO nRF54L15ボードの追加
XIAO nRF54L15(Sense)ボードをNCS(nRF Connect SDK)に追加するには、Seeed Studio Wikiの「Getting Started」ガイドを参照してください。このガイドでは、プロセスの詳細な手順を提供します。
BLEアドバタイジングコード
#include <zephyr/kernel.h>
#include <zephyr/logging/log.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/gap.h>
#include <zephyr/bluetooth/conn.h>
#include <zephyr/sys/printk.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/dt-bindings/gpio/nordic-nrf-gpio.h>
LOG_MODULE_REGISTER(BLE_LowPower, LOG_LEVEL_INF);
#define DEVICE_NAME CONFIG_BT_DEVICE_NAME
#define DEVICE_NAME_LEN (sizeof(DEVICE_NAME) - 1)
static const struct gpio_dt_spec led0 = GPIO_DT_SPEC_GET(DT_ALIAS(led0), gpios);
static const struct bt_data ad[] = {
BT_DATA_BYTES(BT_DATA_FLAGS, BT_LE_AD_GENERAL | BT_LE_AD_NO_BREDR),
BT_DATA(BT_DATA_NAME_COMPLETE, DEVICE_NAME, DEVICE_NAME_LEN),
};
static unsigned char url_data[] = {
0x17,
'/', '/', 'a', 'c', 'a', 'd', 'e', 'm', 'y', '.',
'n', 'o', 'r', 'd', 'i', 'c', 's', 'e', 'm', 'i', '.',
'c', 'o', 'm'
};
static const struct bt_data sd[] = {
BT_DATA(BT_DATA_URI, url_data, sizeof(url_data)),
};
static bool device_connected = false;
static void connected(struct bt_conn *conn, uint8_t err)
{
if (err) {
LOG_ERR("Connection failed (err 0x%02x)\n", err);
} else {
LOG_INF("Device connected\n");
device_connected = true;
}
}
static void disconnected(struct bt_conn *conn, uint8_t reason)
{
LOG_INF("Device disconnected (reason 0x%02x)\n", reason);
device_connected = false;
int err = bt_le_adv_start(BT_LE_ADV_CONN, ad, ARRAY_SIZE(ad), sd, ARRAY_SIZE(sd));
if (err) {
LOG_ERR("Failed to restart advertising (err %d)\n", err);
} else {
LOG_INF("Advertising successfully restarted (connectable)\n");
}
}
BT_CONN_CB_DEFINE(conn_callbacks) = {
.connected = connected,
.disconnected = disconnected,
};
int main(void)
{
int err;
if (!gpio_is_ready_dt(&led0)) {
LOG_ERR("Error: LED device %s is not ready\n", led0.port->name);
return -1;
}
err = gpio_pin_configure_dt(&led0, GPIO_OUTPUT_INACTIVE);
if (err) {
LOG_ERR("Error: Failed to configure LED pin %d (err %d)\n", led0.pin, err);
return -1;
}
LOG_INF("LED configured, initially off.");
err = bt_enable(NULL);
if (err) {
LOG_ERR("Bluetooth initialization failed (err %d)\n", err);
return -1;
}
LOG_INF("Bluetooth initialized\n");
err = bt_le_adv_start(BT_LE_ADV_CONN, ad, ARRAY_SIZE(ad), sd, ARRAY_SIZE(sd));
if (err) {
LOG_ERR("Advertising failed to start (err %d)\n", err);
return -1;
}
LOG_INF("Advertising successfully started (connectable)\n");
while (1) {
if (device_connected) {
gpio_pin_toggle_dt(&led0);
k_sleep(K_MSEC(500));
} else {
gpio_pin_set_dt(&led0, 0);
k_sleep(K_MSEC(1000));
}
}
return 0;
}
-
ad:アドバタイジングデータを定義し、一般的な発見可能フラグとBR/EDRサポートなしフラグ、および完全なデバイス名を含みます。 -
sd:スキャン応答データを定義し、URI(Uniform Resource Identifier)を含みます。 -
connected:このコールバック関数は、Bluetoothデバイスが正常に接続されたときに実行されます。device_connectedフラグをtrueに設定します。 -
disconnected:このコールバック関数は、Bluetoothデバイスが切断されたときに実行されます。device_connectedフラグをfalseに設定し、新しい接続を許可するためにアドバタイジングを再開します。 -
conn_callbacks:接続コールバックを定義する構造体で、connectedおよびdisconnected関数をそれぞれのイベントに割り当てます。 -
main:プログラムのメイン関数。 -
gpio_is_ready_dt:LED GPIOデバイスが準備完了かどうかをチェックします。 -
gpio_pin_configure_dt:LEDピンを出力として設定し、初期状態を非アクティブに設定します。 -
bt_enable(NULL):Bluetoothサブシステムを初期化します。 -
bt_le_adv_start:Bluetoothアドバタイジングを開始します。このコードは、adおよびsdデータを使用して接続可能なアドバタイジングを開始します。 -
while (1):接続状態に基づいてLEDの動作を制御する無限ループ。 -
gpio_pin_toggle_dt:LEDのオン/オフを切り替えます。 -
k_sleep:指定された時間だけスレッドをスリープ状態にします。 -
device_connected:接続状態を追跡するブール値フラグ。デバイスが接続されているときはLEDが500ms間隔で点滅します。デバイスが接続されていないときは、LEDがオフになり、プログラムは1000msスリープします。 -
LOG_INF, LOG_ERR:情報とエラーをログ出力する関数。
BLE Central/GATT Write
これらのコードファイルは、Bluetooth Low Energy(BLE)Centralデバイスを実装しています。Centralは継続的に近くのBluetoothペリフェラルをスキャンし、特定のデバイス(RSSIが-50より大きい)を見つけると自動的に接続を確立します。接続が確立されると、データ転送効率を最適化するためにGATT(Generic Attribute Profile)MTU(Maximum Transmission Unit)交換を実行します。
プログラムの中核機能は、接続されたペリフェラルに対してGATT Write Without Responseコマンドを継続的に送信することです。これは、Bluetooth接続のデータスループットや書き込み速度を測定するなど、パフォーマンステストによく使用されます。
gatt結果
XIAO nRF54L15ボードの追加
XIAO nRF54L15(Sense)ボードをNCS(nRF Connect SDK)に追加するには、Seeed Studio Wikiの「Getting Started」ガイドを参照してください。このガイドでは、プロセスの詳細な手順を提供します。
BLE Central/GATTコード
Main.c
#include <stdint.h>
extern uint32_t central_gatt_write(uint32_t count);
int main(void)
{
(void)central_gatt_write(0U);
return 0;
}
main:プログラムのエントリーポイント。0Uのカウントでcentral_gatt_write関数を呼び出します。これは書き込みコマンドが無限に送信されることを意味します。
central_gatt_write.c
/*
* Copyright (c) 2022 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/conn.h>
#include <zephyr/bluetooth/gatt.h>
#include <zephyr/bluetooth/hci.h>
extern int mtu_exchange(struct bt_conn *conn);
extern int write_cmd(struct bt_conn *conn);
extern struct bt_conn *conn_connected;
extern uint32_t last_write_rate;
extern void (*start_scan_func)(void);
static void device_found(const bt_addr_le_t *addr, int8_t rssi, uint8_t type,
struct net_buf_simple *ad)
{
char dev[BT_ADDR_LE_STR_LEN];
struct bt_conn *conn;
int err;
bt_addr_le_to_str(addr, dev, sizeof(dev));
printk("[DEVICE]: %s, AD evt type %u, AD data len %u, RSSI %i\n",
dev, type, ad->len, rssi);
/* We're only interested in connectable events */
if (type != BT_GAP_ADV_TYPE_ADV_IND &&
type != BT_GAP_ADV_TYPE_ADV_DIRECT_IND) {
return;
}
/* connect only to devices in close proximity */
if (rssi < -50) {
return;
}
err = bt_le_scan_stop();
if (err) {
printk("%s: Stop LE scan failed (err %d)\n", __func__, err);
return;
}
err = bt_conn_le_create(addr, BT_CONN_LE_CREATE_CONN,
BT_LE_CONN_PARAM_DEFAULT, &conn);
if (err) {
printk("%s: Create conn failed (err %d)\n", __func__, err);
start_scan_func();
} else {
bt_conn_unref(conn);
}
}
static void start_scan(void)
{
int err;
err = bt_le_scan_start(BT_LE_SCAN_ACTIVE, device_found);
if (err) {
printk("%s: Scanning failed to start (err %d)\n", __func__,
err);
return;
}
printk("%s: Scanning successfully started\n", __func__);
}
void mtu_updated(struct bt_conn *conn, uint16_t tx, uint16_t rx)
{
printk("Updated MTU: TX: %d RX: %d bytes\n", tx, rx);
}
static struct bt_gatt_cb gatt_callbacks = {
.att_mtu_updated = mtu_updated
};
uint32_t central_gatt_write(uint32_t count)
{
int err;
err = bt_enable(NULL);
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
return 0U;
}
printk("Bluetooth initialized\n");
bt_gatt_cb_register(&gatt_callbacks);
conn_connected = NULL;
last_write_rate = 0U;
start_scan_func = start_scan;
start_scan_func();
while (true) {
struct bt_conn *conn = NULL;
if (conn_connected) {
/* Get a connection reference to ensure that a
* reference is maintained in case disconnected
* callback is called while we perform GATT Write
* command.
*/
conn = bt_conn_ref(conn_connected);
}
if (conn) {
(void)write_cmd(conn);
bt_conn_unref(conn);
if (count) {
count--;
if (!count) {
break;
}
}
k_yield();
} else {
k_sleep(K_SECONDS(1));
}
}
return last_write_rate;
}
-
device_found:スキャン中に新しいデバイスが見つかったときにトリガーされるコールバック関数。見つかったデバイスの情報を出力し、接続可能で近距離(RSSI が -50 より大きい)のデバイスに接続を試みます。接続を作成する前にスキャンプロセスを停止します。 -
start_scan:見つかったデバイスのコールバックとしてdevice_foundを使用してアクティブBLEスキャンを開始する関数。 -
mtu_updated:新しいTXおよびRX MTUサイズを出力するGATT MTU更新のコールバック関数。 -
gatt_callbacks:GATTイベントのコールバックとしてmtu_updated関数を登録する構造体。 -
central_gatt_write:セントラルデバイスアプリケーションのメイン関数。Bluetoothサブシステムを初期化し、GATTコールバックを登録し、デバイスのスキャンを開始します。その後ループに入り、接続を待機し、GATT書き込みを実行するためにwrite_cmdを繰り返し呼び出します。ループは特定の回数実行するか、無限に実行するように設定できます。
gatt_write_common.c
/*
* Copyright (c) 2022 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/conn.h>
#include <zephyr/bluetooth/gatt.h>
#include <zephyr/bluetooth/hci.h>
static struct bt_gatt_exchange_params mtu_exchange_params;
static uint32_t write_count;
static uint32_t write_len;
static uint32_t write_rate;
struct bt_conn *conn_connected;
uint32_t last_write_rate;
void (*start_scan_func)(void);
static void write_cmd_cb(struct bt_conn *conn, void *user_data)
{
static uint32_t cycle_stamp;
uint64_t delta;
delta = k_cycle_get_32() - cycle_stamp;
delta = k_cyc_to_ns_floor64(delta);
if (delta == 0) {
/* Skip division by zero */
return;
}
/* if last data rx-ed was greater than 1 second in the past,
* reset the metrics.
*/
if (delta > (1U * NSEC_PER_SEC)) {
printk("%s: count= %u, len= %u, rate= %u bps.\n", __func__,
write_count, write_len, write_rate);
last_write_rate = write_rate;
write_count = 0U;
write_len = 0U;
write_rate = 0U;
cycle_stamp = k_cycle_get_32();
} else {
uint16_t len;
write_count++;
/* Extract the 16-bit data length stored in user_data */
len = (uint32_t)user_data & 0xFFFF;
write_len += len;
write_rate = ((uint64_t)write_len << 3) * (1U * NSEC_PER_SEC) /
delta;
}
}
static void mtu_exchange_cb(struct bt_conn *conn, uint8_t err,
struct bt_gatt_exchange_params *params)
{
printk("%s: MTU exchange %s (%u)\n", __func__,
err == 0U ? "successful" : "failed",
bt_gatt_get_mtu(conn));
}
static int mtu_exchange(struct bt_conn *conn)
{
int err;
printk("%s: Current MTU = %u\n", __func__, bt_gatt_get_mtu(conn));
mtu_exchange_params.func = mtu_exchange_cb;
printk("%s: Exchange MTU...\n", __func__);
err = bt_gatt_exchange_mtu(conn, &mtu_exchange_params);
if (err) {
printk("%s: MTU exchange failed (err %d)", __func__, err);
}
return err;
}
static void connected(struct bt_conn *conn, uint8_t conn_err)
{
struct bt_conn_info conn_info;
char addr[BT_ADDR_LE_STR_LEN];
int err;
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
if (conn_err) {
printk("%s: Failed to connect to %s (%u)\n", __func__, addr,
conn_err);
return;
}
err = bt_conn_get_info(conn, &conn_info);
if (err) {
printk("Failed to get connection info (%d).\n", err);
return;
}
printk("%s: %s role %u\n", __func__, addr, conn_info.role);
conn_connected = bt_conn_ref(conn);
(void)mtu_exchange(conn);
#if defined(CONFIG_BT_SMP)
if (conn_info.role == BT_CONN_ROLE_CENTRAL) {
err = bt_conn_set_security(conn, BT_SECURITY_L2);
if (err) {
printk("Failed to set security (%d).\n", err);
}
}
#endif
}
static void disconnected(struct bt_conn *conn, uint8_t reason)
{
struct bt_conn_info conn_info;
char addr[BT_ADDR_LE_STR_LEN];
int err;
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
err = bt_conn_get_info(conn, &conn_info);
if (err) {
printk("Failed to get connection info (%d).\n", err);
return;
}
printk("%s: %s role %u, reason %u %s\n", __func__, addr, conn_info.role,
reason, bt_hci_err_to_str(reason));
conn_connected = NULL;
bt_conn_unref(conn);
if (conn_info.role == BT_CONN_ROLE_CENTRAL) {
start_scan_func();
}
}
static bool le_param_req(struct bt_conn *conn, struct bt_le_conn_param *param)
{
printk("%s: int (0x%04x, 0x%04x) lat %u to %u\n", __func__,
param->interval_min, param->interval_max, param->latency,
param->timeout);
return true;
}
static void le_param_updated(struct bt_conn *conn, uint16_t interval,
uint16_t latency, uint16_t timeout)
{
printk("%s: int 0x%04x lat %u to %u\n", __func__, interval,
latency, timeout);
}
#if defined(CONFIG_BT_SMP)
static void security_changed(struct bt_conn *conn, bt_security_t level,
enum bt_security_err err)
{
printk("%s: to level %u, err %s(%u)\n", __func__, level, bt_security_err_to_str(err), err);
}
#endif
BT_CONN_CB_DEFINE(conn_callbacks) = {
.connected = connected,
.disconnected = disconnected,
.le_param_req = le_param_req,
.le_param_updated = le_param_updated,
#if defined(CONFIG_BT_SMP)
.security_changed = security_changed,
#endif
};
int write_cmd(struct bt_conn *conn)
{
static uint8_t data[BT_ATT_MAX_ATTRIBUTE_LEN] = {0, };
static uint16_t data_len;
uint16_t data_len_max;
int err;
data_len_max = bt_gatt_get_mtu(conn) - 3;
if (data_len_max > BT_ATT_MAX_ATTRIBUTE_LEN) {
data_len_max = BT_ATT_MAX_ATTRIBUTE_LEN;
}
#if TEST_FRAGMENTATION_WITH_VARIABLE_LENGTH_DATA
/* Use incremental length data for every write command */
/* TODO: Include test case in BabbleSim tests */
static bool decrement;
if (decrement) {
data_len--;
if (data_len <= 1) {
data_len = 1;
decrement = false;
}
} else {
data_len++;
if (data_len >= data_len_max) {
data_len = data_len_max;
decrement = true;
}
}
#else
/* Use fixed length data for every write command */
data_len = data_len_max;
#endif
/* Pass the 16-bit data length value (instead of reference) in
* user_data so that unique value is pass for each write callback.
* Using handle 0x0001, we do not care if it is writable, we just want
* to transmit the data across.
*/
err = bt_gatt_write_without_response_cb(conn, 0x0001, data, data_len,
false, write_cmd_cb,
(void *)((uint32_t)data_len));
if (err) {
printk("%s: Write cmd failed (%d).\n", __func__, err);
}
return err;
}
-
write_cmd_cb:bt_gatt_write_without_response_cbのコールバック関数。書き込み回数、長さ、およびビット毎秒(bps)でのデータレートを計算して出力します。最後にデータが受信されてからの時間が1秒を超えた場合、これらのメトリクスをリセットします。 -
mtu_exchange_cb:MTU(最大転送単位)交換手順後に呼び出されるコールバック関数。交換が成功したか失敗したかを出力し、新しいMTUサイズを表示します。 -
mtu_exchange:MTU交換手順を開始します。まず現在のMTUを印刷し、その後mtu_exchange_cbをコールバックとして使用してMTU交換を試行します。 -
connected:接続が確立されたときに実行されるコールバック関数です。接続されたデバイスのアドレスとその役割を印刷します。その後、接続への参照を保存し、MTU交換を開始します。セキュリティが有効な場合、セキュリティレベルの設定を試行します。 -
disconnected:接続が終了したときに実行されるコールバック関数です。切断されたデバイスのアドレス、その役割、および切断の理由を印刷します。接続参照をクリアし、デバイスがセントラルだった場合はスキャンを再開します。 -
le_param_req:ペリフェラルからのLE接続パラメータ更新要求を処理するコールバック関数です。要求されたパラメータ(間隔、レイテンシ、タイムアウト)を印刷します。 -
le_param_updated:接続パラメータが正常に更新されたときに呼び出されるコールバック関数です。新しい間隔、レイテンシ、タイムアウト値を印刷します。 -
security_changed:接続のセキュリティレベルが変更されたときに呼び出されるコールバック関数です。 -
write_cmd:応答なしのGATT書き込みコマンドを準備して送信する関数です。現在のMTUに基づいて最大データ長を決定し、ハンドル0x0001にデータを送信します。write_cmd_cbをコールバックとして使用します。
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!弊社製品でのご体験ができる限りスムーズになるよう、さまざまなサポートを提供いたします。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを提供しています。