Seeed Studio XIAO nRF54L15 Sense 内蔵センサーの使用方法
以下のサンプルコードは PlatformIO 用に設計されていますが、nRF Connect SDK とも互換性があります。
VS Code をベースとして、nRF Connect SDK で以下のケースを使用したい場合は、提供されたリンクを参照し、app.overlay ファイルを追加して prj.conf の内容を変更してください
XIAO nRF54L15 Sense IMU
6軸 IMU(慣性測定ユニット) LSM6DS3TR-C のようなセンサーは、加速度計とジャイロスコープを統合して、三次元空間における物体の動きと方向を測定します。具体的に、LSM6DS3TR-C には以下の機能があります:
加速度計機能:
- X、Y、Z軸に沿った物体の加速度を測定します。物体の動き(例:静止、加速、減速)と傾きの変化(例:物体の角度)を感知できます。
- 歩行、位置変化、振動などの検出に使用できます。
ジャイロスコープ機能:
- X、Y、Z軸周りの物体の角速度、つまり物体の回転を測定します。
- 回転、回転速度、方向の変化の検出に使用できます。
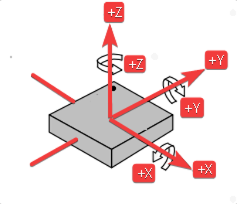
- X軸角度(Roll) は、X軸周りの回転方向の角度です。
- Y軸角度(Pitch) は、Y軸周りの回転方向の角度です。
- Z軸角度(Yaw) は、Z軸周りの回転方向の角度です。
IMU ドライバー
開発体験を簡素化し、この IMU プログラムでの迅速なスタートを確保するため、必要なドライバーコードの作成に PlatformIO プラットフォームを活用しました。PlatformIO は組み込み開発のための包括的で効率的な環境を提供し、XIAO nRF54L15 Sense にとって理想的な選択肢となっています。
続行する前に、開発環境が正しく設定されていることを確認してください。まだ Seeed Studio XIAO nRF54L15 開発ボードを PlatformIO 設定に追加していない場合は、設定方法の詳細な手順について、このリンクを参照してください。この重要なステップにより、PlatformIO がボードを適切に認識し、コードをコンパイルできるようになります。
環境の準備ができたら、IMU ドライバーを使用して LSM6DS3TR-C から生のセンサーデータを読み取ることができます。このデータには以下が含まれます:
-
加速度計生値(accel raw):X、Y、Z軸に沿った加速度を表します。
-
ジャイロスコープ生値(gyro raw):X、Y、Z軸周りの角速度を示します。
-
トリガーカウント(trig_cnt):新しいデータサンプルごとに増加するカウンター。
リポジトリを C:\Users\xxx\.platformio\platforms にダウンロードし、VS Code で examples\zephyr-imu フォルダを開きます。次に main.c をクリックすると、以下のコードが表示されます:
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
#include <zephyr/logging/log.h>
LOG_MODULE_REGISTER(zephyr_imu, LOG_LEVEL_INF);
static inline float out_ev(struct sensor_value *val)
{
return (val->val1 + (float)val->val2 / 1000000);
}
static void fetch_and_display(const struct device *dev)
{
struct sensor_value x, y, z;
static int trig_cnt;
trig_cnt++;
/* lsm6dsl accel */
sensor_sample_fetch_chan(dev, SENSOR_CHAN_ACCEL_XYZ);
sensor_channel_get(dev, SENSOR_CHAN_ACCEL_X, &x);
sensor_channel_get(dev, SENSOR_CHAN_ACCEL_Y, &y);
sensor_channel_get(dev, SENSOR_CHAN_ACCEL_Z, &z);
LOG_INF("accel x:%f m/s^2 y:%f m/s^2 z:%f m/s^2",
(double)out_ev(&x), (double)out_ev(&y), (double)out_ev(&z));
/* lsm6dsl gyro */
sensor_sample_fetch_chan(dev, SENSOR_CHAN_GYRO_XYZ);
sensor_channel_get(dev, SENSOR_CHAN_GYRO_X, &x);
sensor_channel_get(dev, SENSOR_CHAN_GYRO_Y, &y);
sensor_channel_get(dev, SENSOR_CHAN_GYRO_Z, &z);
LOG_INF("gyro x:%f rad/s y:%f rad/s z:%f rad/s",
(double)out_ev(&x), (double)out_ev(&y), (double)out_ev(&z));
LOG_INF("trig_cnt:%d", trig_cnt);
}
static int set_sampling_freq(const struct device *dev)
{
int ret = 0;
struct sensor_value odr_attr;
/* set accel/gyro sampling frequency to 12.5 Hz */
odr_attr.val1 = 12.5;
odr_attr.val2 = 0;
ret = sensor_attr_set(dev, SENSOR_CHAN_ACCEL_XYZ,
SENSOR_ATTR_SAMPLING_FREQUENCY, &odr_attr);
if (ret != 0) {
LOG_ERR("Cannot set sampling frequency for accelerometer.");
return ret;
}
ret = sensor_attr_set(dev, SENSOR_CHAN_GYRO_XYZ,
SENSOR_ATTR_SAMPLING_FREQUENCY, &odr_attr);
if (ret != 0) {
LOG_ERR("Cannot set sampling frequency for gyro.");
return ret;
}
return 0;
}
#ifdef CONFIG_LSM6DSL_TRIGGER
static void trigger_handler(const struct device *dev,
const struct sensor_trigger *trig)
{
fetch_and_display(dev);
}
static void test_trigger_mode(const struct device *dev)
{
struct sensor_trigger trig;
if (set_sampling_freq(dev) != 0) {
return;
}
trig.type = SENSOR_TRIG_DATA_READY;
trig.chan = SENSOR_CHAN_ACCEL_XYZ;
if (sensor_trigger_set(dev, &trig, trigger_handler) != 0) {
LOG_ERR("Could not set sensor type and channel");
return;
}
}
#else
static void test_polling_mode(const struct device *dev)
{
if (set_sampling_freq(dev) != 0) {
return;
}
while (1) {
fetch_and_display(dev);
k_sleep(K_MSEC(1000));
}
}
#endif
int main(void)
{
const struct device *const dev = DEVICE_DT_GET(DT_ALIAS(imu0));
if (!device_is_ready(dev)) {
LOG_ERR("%s: device not ready.", dev->name);
return 0;
}
#ifdef CONFIG_LSM6DSL_TRIGGER
LOG_INF("Testing LSM6DSL sensor in trigger mode.");
test_trigger_mode(dev);
#else
LOG_INF("Testing LSM6DSL sensor in polling mode.");
test_polling_mode(dev);
#endif
return 0;
}
次に、XIAO nRF54L15 を USB 経由でコンピューターに接続します。VS Code で:
-
ビルド:VS Code 下部の PlatformIO ツールバーの「Build」アイコン(チェックマーク)をクリックするか、PlatformIO サイドバーを使用します:PROJECT TASKS -> your_project_name -> General -> Build。
-
アップロード:ビルドが成功した後、PlatformIO ツールバーの「Upload」アイコン(右矢印)をクリックするか、PlatformIO サイドバーを使用します:PROJECT TASKS -> your_project_name -> General -> Upload。
アップロードが成功した後、PlatformIO Device Monitor(PROJECT TASKS -> your_project_name -> General -> Monitor)で以下の例のような出力が表示されるはずです。このシリアル出力は、リアルタイムの加速度計とジャイロスコープの読み取り値を示し、デバイスの動きと方向に関する重要な洞察を提供します。

PlatformIO Device Monitor からのリアルタイム IMU データ出力、生の加速度計とジャイロスコープの読み取り値を表示。
この生データは、適切なアルゴリズム(例:フィルタリング、センサーフュージョン)を適用することで、単純な動き検出から複雑な方向追跡まで、さまざまなアプリケーションの基礎となります。
XIAO nRF54L15 Sense MIC
MSM261DGT006 は、パルス密度変調(PDM)データを出力するデジタルマイクロフォン(DMIC)で、XIAO nRF54L15 Sense のようなマイクロコントローラーとの直接デジタルインターフェースに適しています。私たちの DMIC ドライバーは、この PDM 出力を処理し、使用可能なオーディオサンプルに変換し、さまざまなアプリケーション用に処理するように特別に設計されています。
ドライバーはマイクロフォンを初期化し、適切なサンプリングレート(例:標準オーディオ用の 16000 Hz)を設定し、PDM クロック周波数を構成します。その後、マイクロフォンからサンプルバッファを継続的に読み取り、リアルタイムオーディオキャプチャを可能にします。
PlatformIO Device Monitor で表示される DMIC ドライバーからの出力は、マイクロフォンの動作と入力オーディオデータに関する重要な情報を提供します。観察される主要なメッセージには以下があります:
-
DMIC sample=::DMIC サンプリングプロセスの開始を示します。 -
PCM output rate:16000, channels: 1:オーディオ出力設定を確認し、通常は 16 kHz のサンプルレートと単一チャンネル(モノ)オーディオです。 -
dmic_nrf_pdm:PDM clock frequency: 1280000, actual PCM rate: 16000:内部 PDM クロック周波数と結果として得られる PCM オーディオサンプルレートを示します。 -
got buffer 0x... of 3200 bytes:ドライバがマイクから音声データのバッファを正常に受信したことを確認します。16進数のアドレス(例:0x20004C8)とバイト単位のサイズ(例:3200バイト)が表示されます。これらのバッファには、処理や分析が可能な生の音声サンプルが含まれています。 -
dmix_sample: Exiting:DMICサンプリングプロセスが停止されたことを示します。
以下は、DMICドライバが動作している際にPlatformIO Device Monitorで確認できる典型的な出力例で、音声データの正常なキャプチャとバッファリングを示しています。
DMICドライバ
キャプチャされたこの生の音声データは、音声コマンド、音響イベント検出、環境騒音監視、より複雑な音声処理タスクなど、幅広いアプリケーションに使用できます。
以下のコード例は、XIAO nRF54L15ボード上のプッシュボタンを使用して音声を録音し、録音されたWAVファイルをコンピュータに保存する方法を示しています。
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/audio/dmic.h>
#include <zephyr/sys/util.h>
#include <zephyr/logging/log.h>
#include <zephyr/drivers/uart.h>
LOG_MODULE_REGISTER(mic_capture_sample, LOG_LEVEL_INF);
#define RECORD_TIME_S 10 // Recording duration (seconds)
#define SAMPLE_RATE_HZ 16000 // Sample rate (Hz)
#define SAMPLE_BIT_WIDTH 16 // Sample bit width (bits)
#define BYTES_PER_SAMPLE (SAMPLE_BIT_WIDTH / 8) // Bytes per sample
#define READ_TIMEOUT_MS 1000 // DMIC read timeout (ms)
#define CHUNK_DURATION_MS 100 // Duration of each chunk (ms)
#define CHUNK_SIZE_BYTES (BYTES_PER_SAMPLE * (SAMPLE_RATE_HZ * CHUNK_DURATION_MS) / 1000) // Chunk size (bytes)
#define CHUNK_COUNT 8 // Number of blocks in memory pool
#define TOTAL_CHUNKS (RECORD_TIME_S * 1000 / CHUNK_DURATION_MS) // Total number of chunks
static const struct device *const dmic_dev = DEVICE_DT_GET(DT_ALIAS(dmic20)); // DMIC device handle
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(DT_ALIAS(led0), gpios); // LED device descriptor
static const struct gpio_dt_spec button = GPIO_DT_SPEC_GET(DT_ALIAS(sw0), gpios); // Button device descriptor
static const struct device *const console_dev = DEVICE_DT_GET(DT_CHOSEN(zephyr_console)); // Console UART device
K_MEM_SLAB_DEFINE_STATIC(mem_slab, CHUNK_SIZE_BYTES, CHUNK_COUNT, 4); // Audio data memory pool
K_MSGQ_DEFINE(audio_msgq, sizeof(void *), CHUNK_COUNT, 4);
static K_SEM_DEFINE(tx_done_sem, 0, 1); // Button semaphore
static K_SEM_DEFINE(button_sem, 0, 1); // UART TX done semaphore
static const uint8_t packet_start[] = {0xAA, 0x55, 'S', 'T', 'A', 'R', 'T'}; // Packet start marker
static const uint8_t packet_end[] = {0xAA, 0x55, 'E', 'N', 'D'}; // Packet end marker
static struct gpio_callback button_cb_data;
/**
* @brief UART callback function
*
* @param dev UART device pointer
* @param evt UART event
* @param user_data User data (unused)
*/
static void uart_tx_callback(const struct device *dev, struct uart_event *evt, void *user_data)
{
if (evt->type == UART_TX_DONE) {
k_sem_give(&tx_done_sem);
}
}
/**
* @brief Button interrupt callback function
*
* @param dev Button device pointer
* @param cb Callback structure pointer
* @param pins Triggered pins
*/
void button_pressed(const struct device *dev, struct gpio_callback *cb, uint32_t pins)
{
k_sem_give(&button_sem);
}
/**
* @brief Send a data packet via UART (polling, for small packets)
*
* @param data Data pointer
* @param len Data length
*/
static void send_packet_poll(const uint8_t *data, size_t len)
{
for (size_t i = 0; i < len; i++) {
uart_poll_out(console_dev, data[i]);
}
}
/**
* @brief UART writer thread function
*
* This thread continuously reads audio data from the message queue and sends it via UART.
* It waits for the semaphore to signal that the previous transmission is done before sending the next chunk.
*/
void uart_writer_thread(void *p1, void *p2, void *p3)
{
uart_callback_set(console_dev, uart_tx_callback, NULL);
while (true) {
void *buffer;
k_msgq_get(&audio_msgq, &buffer, K_FOREVER);
if (buffer == NULL) {
send_packet_poll(packet_end, sizeof(packet_end));
continue;
}
uart_tx(console_dev, buffer, CHUNK_SIZE_BYTES, SYS_FOREVER_US);
k_sem_take(&tx_done_sem, K_FOREVER);
k_mem_slab_free(&mem_slab, buffer);
}
}
K_THREAD_DEFINE(uart_writer_tid, 2048, uart_writer_thread, NULL, NULL, NULL,
K_PRIO_COOP(7), 0, 0);
static struct pcm_stream_cfg stream_cfg = {
.pcm_rate = SAMPLE_RATE_HZ,
.pcm_width = SAMPLE_BIT_WIDTH,
.block_size = CHUNK_SIZE_BYTES,
.mem_slab = &mem_slab,
}; // PCM stream configuration
static struct dmic_cfg dmic_config = {
.io = {
.min_pdm_clk_freq = 1000000,
.max_pdm_clk_freq = 3500000,
.min_pdm_clk_dc = 40,
.max_pdm_clk_dc = 60,
},
.streams = &stream_cfg,
.channel = {
.req_num_streams = 1,
.req_num_chan = 1,
},
}; // DMIC configuration
/**
* @brief Record audio from DMIC and stream it via UART
*
* @return 0 on success, negative error code on failure
*/
static int record_and_stream_audio(void)
{
int ret;
void *buffer;
uint32_t size;
k_msgq_purge(&audio_msgq);
ret = dmic_configure(dmic_dev, &dmic_config);
if (ret < 0) {
LOG_ERR("Failed to configure DMIC: %d", ret);
return ret;
}
ret = dmic_trigger(dmic_dev, DMIC_TRIGGER_START);
if (ret < 0) {
LOG_ERR("Failed to start DMIC: %d", ret);
return ret;
}
ret = dmic_read(dmic_dev, 0, &buffer, &size, READ_TIMEOUT_MS);
if (ret < 0) {
LOG_WRN("Failed to read discard chunk: %d", ret);
} else {
k_mem_slab_free(&mem_slab, buffer);
}
send_packet_poll(packet_start, sizeof(packet_start));
for (int i = 0; i < TOTAL_CHUNKS; i++) {
ret = dmic_read(dmic_dev, 0, &buffer, &size, READ_TIMEOUT_MS);
if (ret < 0) {
LOG_ERR("Failed to read from DMIC: %d", ret);
break;
}
ret = k_msgq_put(&audio_msgq, &buffer, K_MSEC(500));
if (ret != 0) {
LOG_ERR("Failed to queue buffer. UART thread might be too slow.");
k_mem_slab_free(&mem_slab, buffer);
break;
}
}
(void)dmic_trigger(dmic_dev, DMIC_TRIGGER_STOP);
void *end_marker = NULL;
k_msgq_put(&audio_msgq, &end_marker, K_NO_WAIT);
LOG_INF("Audio capture finished and data queued.");
return 0;
}
/**
* @brief Main function, initializes peripherals and waits for button to trigger recording in a loop
*
* @return Always returns 0
*/
int main(void)
{
int ret;
// Check if all required devices are ready
if (!device_is_ready(dmic_dev) || !device_is_ready(led.port) ||
!device_is_ready(button.port) || !device_is_ready(console_dev)) {
LOG_ERR("A required device is not ready.");
return -ENODEV;
}
// Configure DMIC channel mapping
dmic_config.channel.req_chan_map_lo = dmic_build_channel_map(0, 0, PDM_CHAN_LEFT);
// Configure LED as output
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
if (ret < 0) { return ret; }
// Configure button as input and enable interrupt
ret = gpio_pin_configure_dt(&button, GPIO_INPUT);
if (ret < 0) { return ret; }
ret = gpio_pin_interrupt_configure_dt(&button, GPIO_INT_EDGE_TO_ACTIVE);
if (ret < 0) { return ret; }
gpio_init_callback(&button_cb_data, button_pressed, BIT(button.pin));
gpio_add_callback(button.port, &button_cb_data);
LOG_INF("Zephyr Audio Streamer Ready.");
LOG_INF("Press button SW0 to start recording...");
// Main loop, wait for button to trigger recording
while (1) {
k_sem_take(&button_sem, K_FOREVER);
LOG_INF("Button pressed, starting capture...");
gpio_pin_set_dt(&led, 0);
record_and_stream_audio();
gpio_pin_set_dt(&led, 1);
LOG_INF("\nPress button SW0 to start recording again...");
}
return 0;
}
次に、scriptsフォルダディレクトリでターミナルを開き、プログラムが既に書き込まれていることを前提として、以下の操作を実行します。
ステップ 1:
python3 -m pip install pyserial
ステップ 2:
python record.py -p /dev/cu.usbmodemA0CBDDC33 -o output.wav -b 921600
このコマンドpython record.py -p **/dev/cu.usbmodemA0CBDDC33** -o output.wav -b 921600では、使用するシリアルポートに置き換える必要があります。
ステップ 3:
- コマンドを実行すると、音声を録音するためにボタンを押すよう促されます。

音声を録音した後、ファイルはscriptsに保存されます
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社では、お客様の製品体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。