
Seeed Studio XIAO nRF54L15(Sense) 入門ガイド


はじめに
Seeed Studio XIAO nRF54L15 は、最先端の Nordic nRF54L15 チップを搭載した、コンパクトで高性能な開発ボードです。この次世代 SoC は、超低消費電力のマルチプロトコル 2.4 GHz 無線と、128 MHz Arm® Cortex®-M33 プロセッサ および 128 MHz RISC-V コプロセッサ を備えた MCU を統合しています。最大 1.5 MB の NVM と 256 KB の RAM まで拡張可能なメモリと、バッテリー寿命を大幅に延長する超低消費電力設計を特徴とします。強力な無線機能により、Bluetooth® 6.0(Channel Sounding を含む)、Matter、Thread、Zigbee、および最大 4 Mbps の高スループット 2.4 GHz 独自モードをサポートします。ボードには、包括的なペリフェラルセット、統合された 128 MHz RISC-V コプロセッサ、さらに TrustZone® 分離や暗号エンジン保護などの高度なセキュリティ機能が含まれます。リチウムイオンバッテリー管理機能を内蔵しており、XIAO nRF54L15 はスマートウェアラブル、産業用センサー、高度な HMI など、コンパクトで安全かつ省電力な IoT ソリューションに最適です。
仕様
| 項目 | XIAO nRF54L15 | XIAO nRF54L15 Sense |
|---|---|---|
| MCU | Arm Cortex-M33 128 MHz RISC-V coprocessor 128 MHz FLPR | Arm Cortex-M33 128 MHz RISC-V coprocessor 128 MHz FLPR |
| 無線接続 | Bluetooth LE 6.0(Channel Sounding を含む) | Bluetooth LE 6.0(Channel Sounding を含む) |
| メモリ | NVM 1.5 MB + RAM256 KB | NVM 1.5 MB + RAM256 KB |
| 内蔵センサー | N/A | 6 DOF IMU(LSM6DS3TR-C) マイク (MSM261DGT006) |
| 送信電力 (TX power) | +8 dBm | +8 dBm |
| 受信感度 (RX sensitivity) | -96 dBm | -96 dBm |
| 主なペリフェラル | 14-bit ADC、Global RTC | 14-bit ADC、Global RTC |
| 電源 | USB Type-C インターフェース給電 | USB Type-C インターフェース給電 |
| 動作温度 | -40 ~ 105°C | -40 ~ 105°C |
| 電源電圧範囲 | 3.7 ~ 5 V | 3.7 ~ 5 V |
| ESB および 2.4 GHz 独自プロトコル | 最大 4 Mbps | 最大 4 Mbps |
| タンパ検出 | YES | YES |
| Bluetooth チャネルサウンディング | YES | YES |
特長
- 高性能 CPU: DSP 命令と FPU 浮動小数点演算をサポートする 128 MHz Arm® Cortex®-M33 プロセッサ、32 ビット RISC アーキテクチャ、および統合 128 MHz RISC-V コプロセッサを搭載。
- 超低消費電力: 優れた超低消費電力を実現する設計により、バッテリー寿命を大幅に延長し、高度な電源管理機能を備えています。
- マルチモード無線伝送: 統合 2.4 GHz マルチプロトコル無線トランシーバにより、Bluetooth Low Energy(Channel Sounding を含む)、802.15.4-2020、Matter、Thread、Zigbee、および 2.4 GHz 独自モード(最大 4 Mbps)をサポート。
- 堅牢なセキュリティ: TrustZone® 分離、タンパ検出、暗号エンジン側のチャネルリーク保護など、高度なセキュリティ機能を搭載。
- 豊富なオンチップリソース: 最大 1.5 MB の NVM と 256 KB の RAM まで拡張可能なメモリ構成により、十分なストレージ容量を提供。
- 豊富なインターフェース: System OFF モードでも利用可能な新しい Global RTC、14-bit ADC、高速シリアルインターフェースなど、充実したペリフェラルセットを搭載。リチウムバッテリー管理機能を内蔵。
ハードウェア概要
- XIAO nRF54L15
- XIAO nRF54L15 Sense
| XIAO nRF54L15 表面表示図 |
|---|
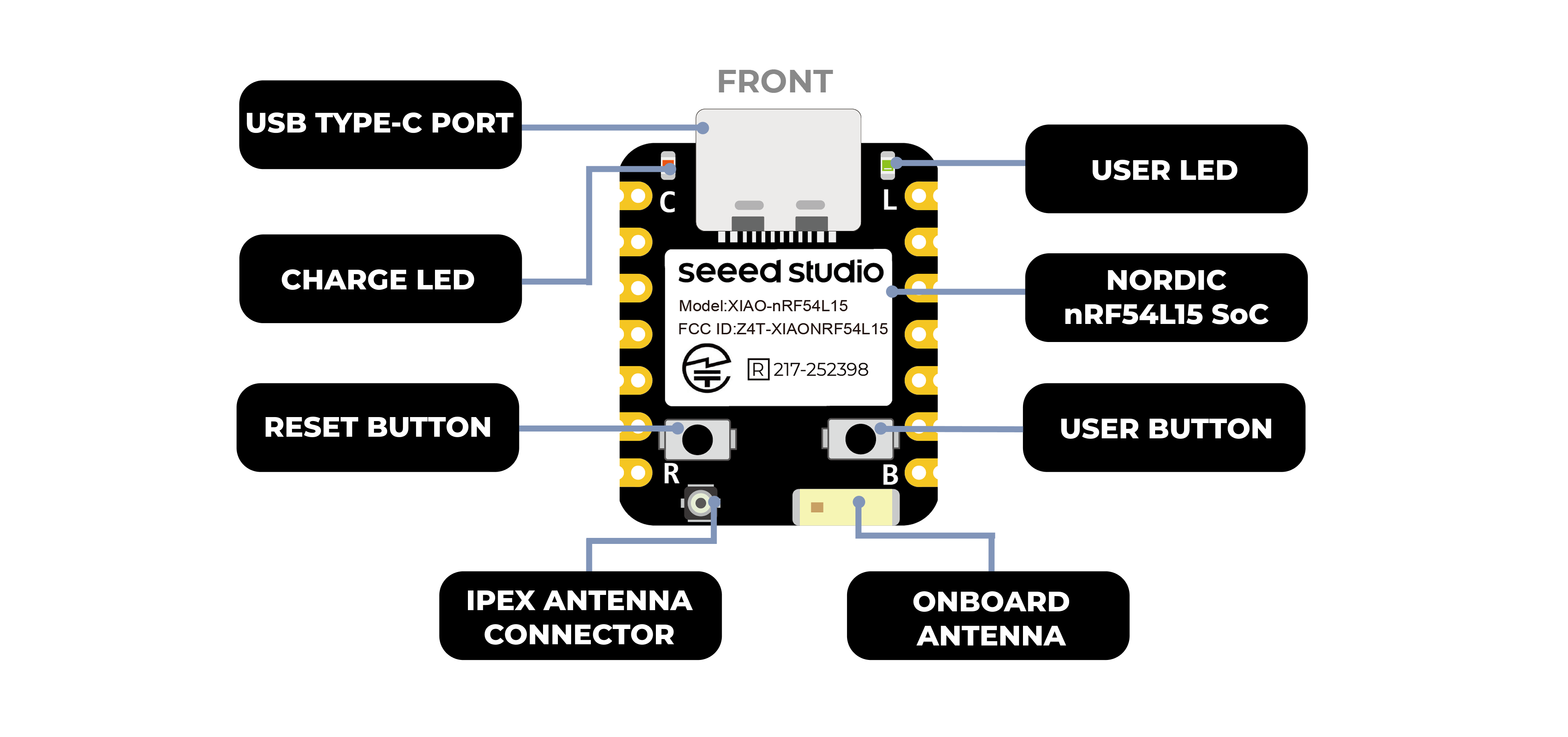 |
| XIAO nRF54L15 裏面表示図 |
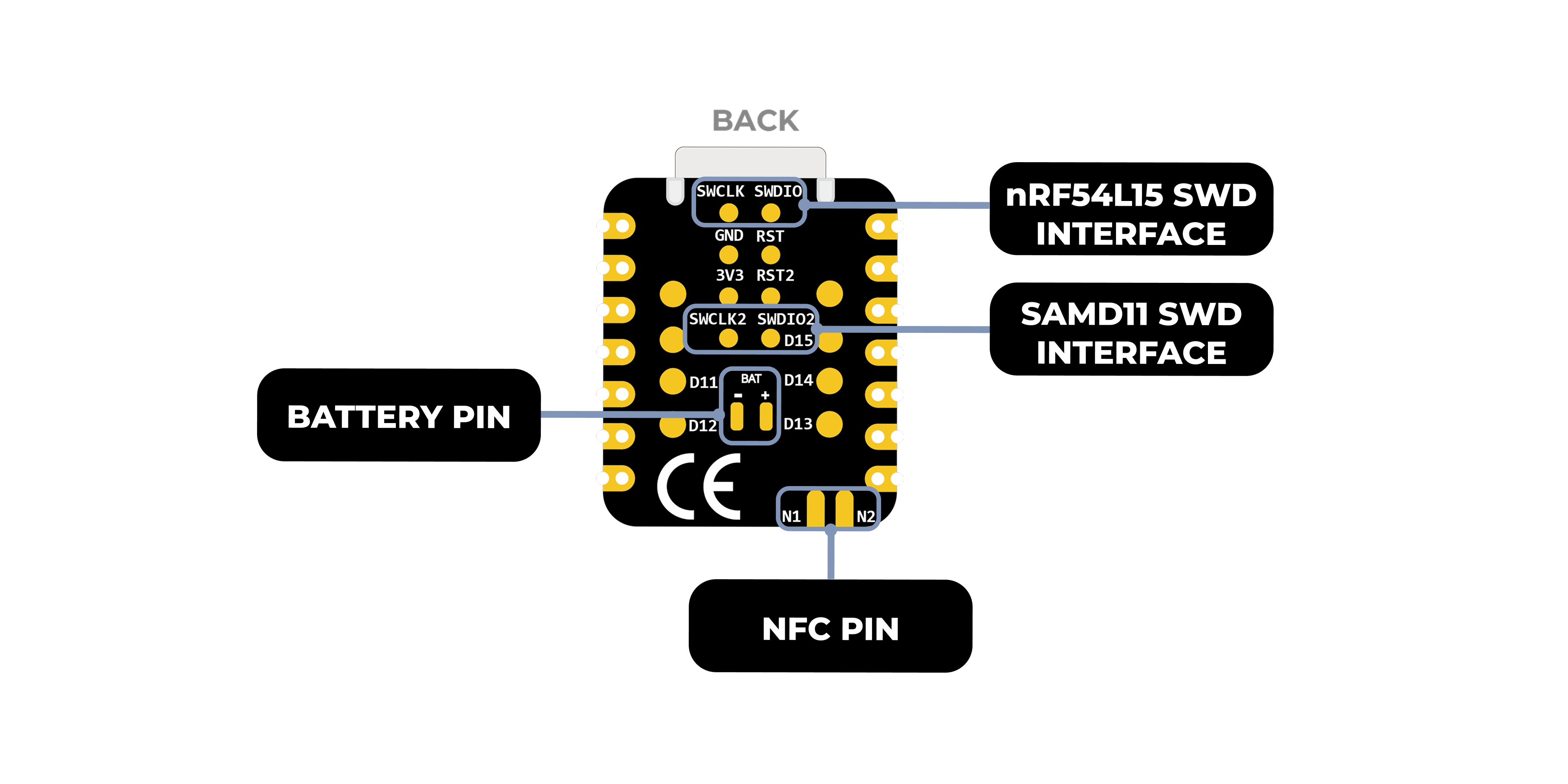 |
| XIAO nRF54L15 ピン一覧 |
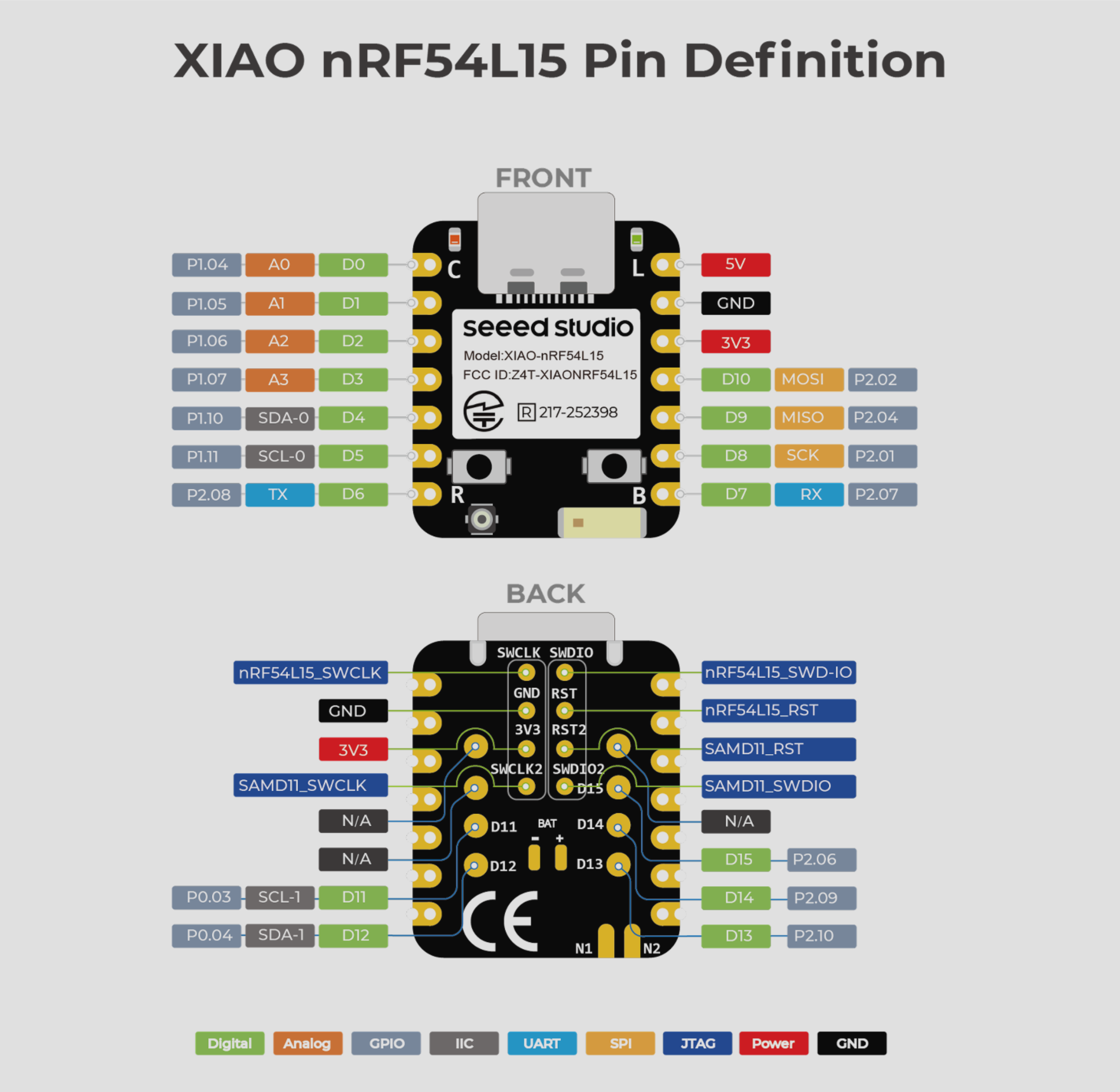 |
| XIAO nRF54L15 Sense 表面表示図 |
|---|
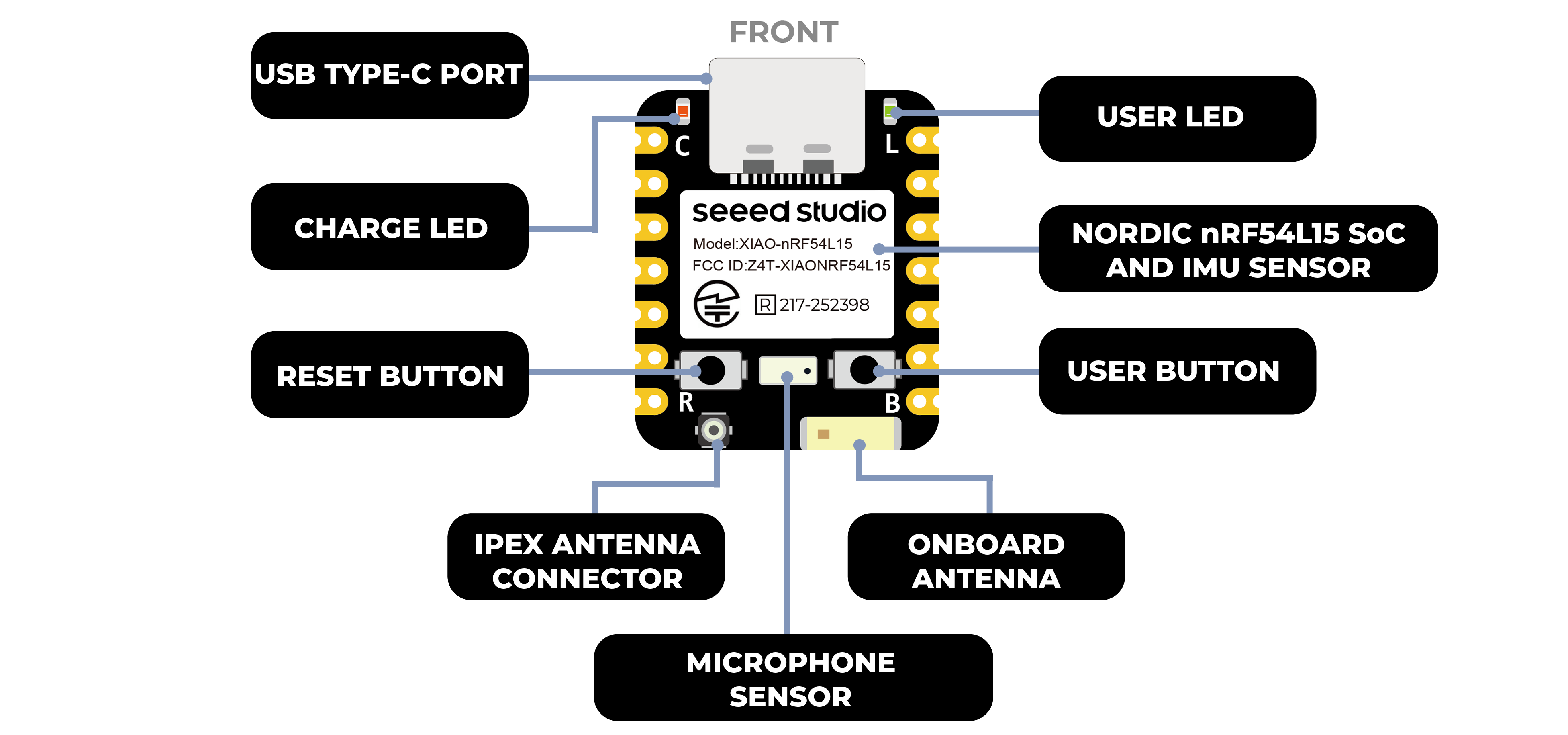 |
| XIAO nRF54L15 Sense 裏面表示図 |
|
| XIAO nRF54L15 Sense ピン一覧 |
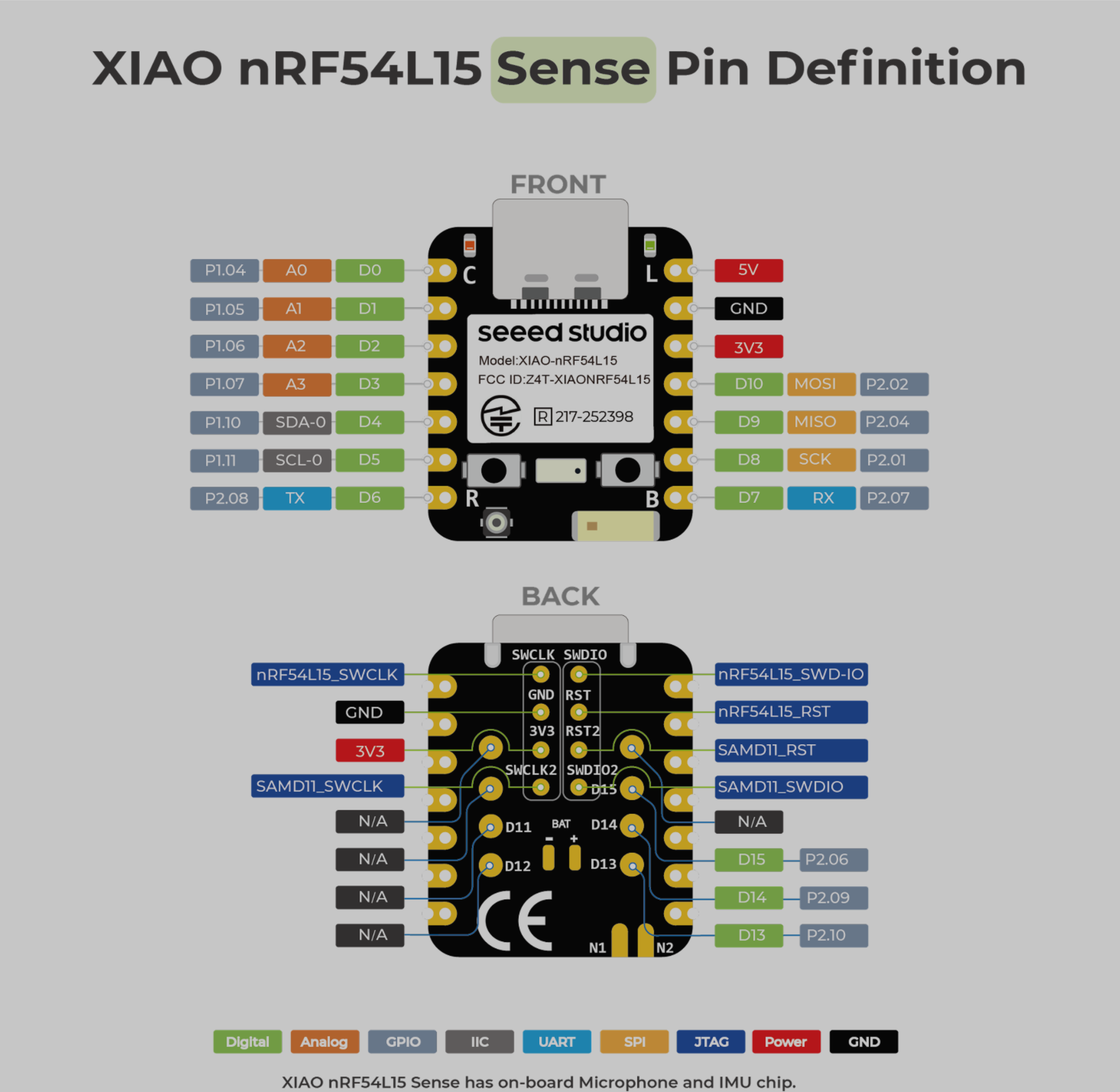 |
ピンマップ
| XIAO ピン | 機能 | チップピン | 説明 |
|---|---|---|---|
| 5V | VBUS | 電源入力/出力 | |
| GND | |||
| 3V3 | 3V3_OUT | 電源出力 | |
| D0 | アナログ | P1.04 | GPIO、ADC |
| D1 | アナログ | P1.05 | GPIO、ADC |
| D2 | アナログ | P1.06 | GPIO、ADC |
| D3 | アナログ | P1.07 | GPIO、ADC |
| D4 | SDA-0 | P1.10 | GPIO、I2C データ |
| D5 | SCL-0 | P1.11 | GPIO、I2C クロック |
| D6 | TX | P2.08 | GPIO、UART 送信 |
| D7 | RX | P2.07 | GPIO、UART 受信 |
| D8 | SPI_SCK | P2.01 | GPIO、SPI クロック |
| D9 | SPI_MISO | P2.04 | GPIO、SPI データ |
| D10 | SPI_MOSI | P2.02 | GPIO、SPI データ |
| D11 | SCL-1 | P0.03 | GPIO、I2C |
| D12 | SDA-1 | P0.04 | GPIO、I2C |
| D13 | GPIO | P2.10 | GPIO |
| D14 | GPIO | P2.09 | GPIO |
| D15 | GPIO | P2.06 | GPIO |
| nRF54L15_SWCLK | SWDCLK | JTAG | |
| nRF54L15_SWD-IO | SWDIO | JTAG | |
| nRF54L15_RST | RST | JTAG | |
| SAMD11_SWCLK | PA30 | JTAG | |
| SAMD11_SWDIO | PA31 | JTAG | |
| SAMD11_RST | RST2 | JTAG | |
| NFC1 | P1.02 | NRF | |
| NFC2 | P1.03 | NRF | |
| Reset | nRF54_RESET | EN | |
| USER KEY | P0.00 | ユーザーキー | |
| RF Switch Port Select | P2.05 | オンボードアンテナ切り替え | |
| RF Switch Power | P2.03 | 電源 | |
| AIN7_VBAT | P1.14 | BAT 電圧値の読み取り | |
| CHARGE_LED | charge_LED | CHG-LED_赤 | |
| USER_LED | P2.00 | ユーザー用 LED |
nRFConnect SDK の使用
nRF Connect SDK(NCS)は、Nordic Semiconductor が提供する拡張性の高い統合ソフトウェア開発キットで、Nordic の nRF52、nRF53、nRF54、nRF70、nRF91 シリーズをベースとしたワイヤレスデバイス向けに、低消費電力ワイヤレスアプリケーションを構築するために特別に設計されています。
NCS は、市販のサンプルアプリケーション、プロトコルスタック、ライブラリ、ハードウェアドライバなどの豊富なエコシステムを提供し、開発プロセスを簡素化し、製品化までの時間を短縮します。そのモジュール式で構成可能な特性により、メモリ制約のあるデバイス向けにサイズ最適化されたソフトウェアを構築できる柔軟性と、より高度で複雑なアプリケーション向けの強力な機能性の両方を開発者に提供します。NCS は GitHub 上でホストされているオープンソースプロジェクトであり、Visual Studio Code などの統合開発環境に対して優れたサポートを提供します。
VSCode 上で nRF Connect SDK を使用する
事前に nRF Connect SDK の知識をインストールしておく
このドキュメントでは、Windows 11 コンピュータに nRF Connect SDK 開発環境をインストールする方法を詳しく説明します。以下はインストールが必要なツールの概要です。
-
VS Studio Code をインストール
-
nRF Command Line Tools
-
nRF Connect for Desktop
-
Git
-
Ninja
ninja --version
- CMake
cmake --version
- Zephyr SDK
west --version
- nRF Connect SDK
- VSCode nRF Connect プラグイン
すでにコンピュータにインストール済みの場合は、以下のコマンドに従ってツールのバージョン番号を確認できます。
VScode でボードを設定し、書き込み用ファイルをビルドする
VS Code を開き、プラグインセンターで nRF Connect for VS Code Extension Pack を検索します。このプラグインパックは、nRF Connect に必要な他の VS Code プラグインを自動的にインストールします。
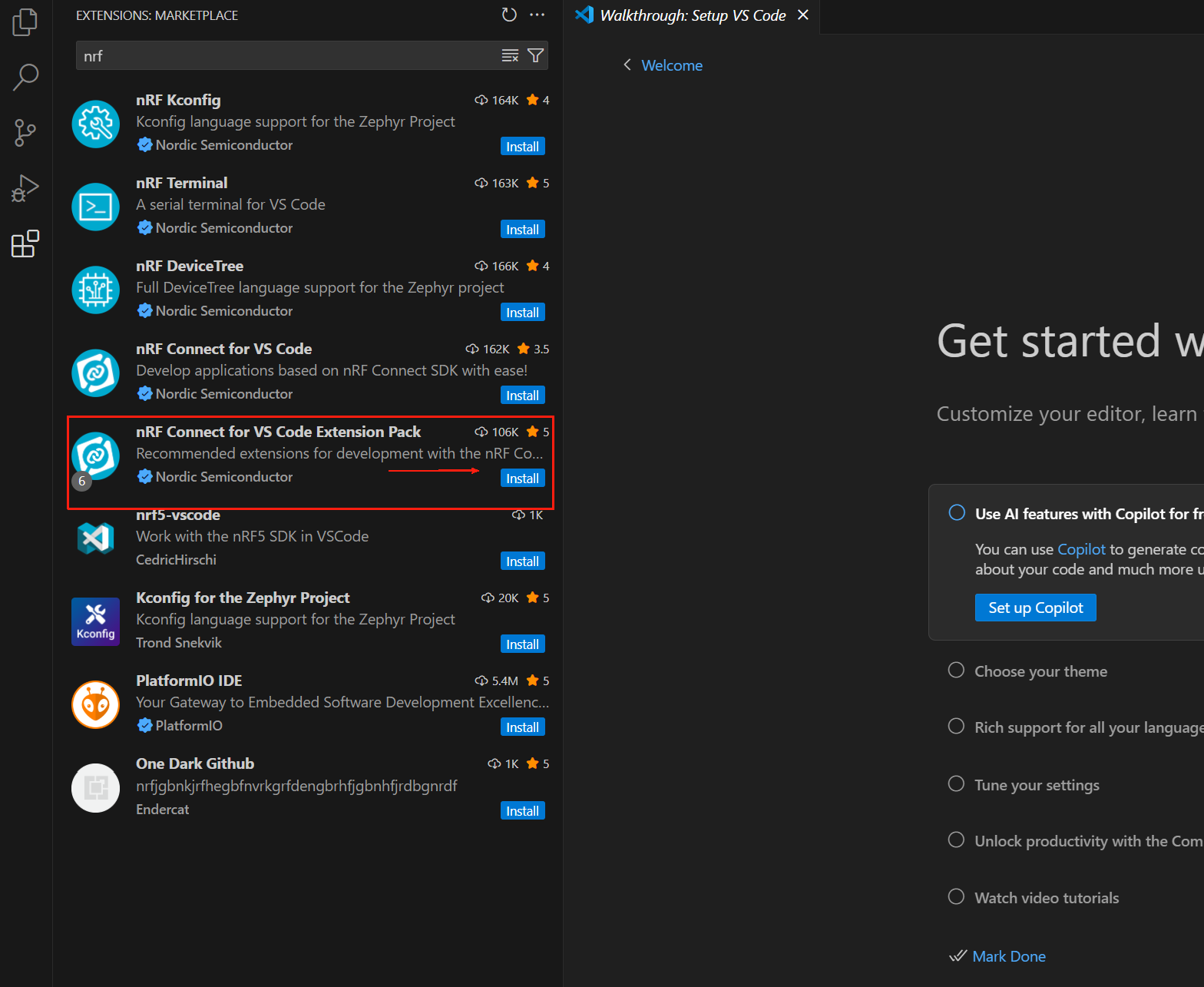
nRF Connect for VS Code 拡張機能により、開発者は一般的な Visual Studio Code 統合開発環境(VS Code IDE)を利用して、Nordic の nRF Connect SDK(Software Development Kit)に基づく組み込みアプリケーションを開発、ビルド、デバッグ、デプロイできます。この拡張機能には、コンパイラインターフェース、リンカ、完全なビルドシステム、RTOS 対応デバッガ、nRF Connect SDK とのシームレスな連携、DeviceTree 可視化エディタ、統合シリアルターミナルなどの便利な開発ツールが含まれています。
VS Code 用 nRF Connect 拡張パッケージには、次のコンポーネントが含まれます。
- nRF Connect for VS Code:メイン拡張機能であり、ビルドシステムと nRF Connect SDK 間のインターフェース、および nRF Connect SDK のバージョンとツールチェーンを管理するためのインターフェースを含みます。
- nRF DeviceTree:DeviceTree 言語サポートと DeviceTree 可視化エディタを提供します。
- nRF Kconfig:Kconfig 言語サポートを提供します。
- nRF Terminal:シリアルおよび RTT ターミナル。
- Microsoft C/C++:IntelliSense の機能を含む C/C++ の言語サポートを追加します。
- CMake:CMake 言語サポート。
- GNU Linker Mapping Files:リンカマッピングファイルのサポート。 拡張機能を通じて、任意のバージョンの nRF Connect SDK とそのツールチェーンをダウンロードできます。VS Code 用 nRF Connect の完全なドキュメントは https://docs.nordicsemi.com/bundle/nrf-connect-vscode/page/index.html で参照できます。
ツールチェーンのインストール
ツールチェーンは、アセンブラ、コンパイラ、リンカ、CMake コンポーネントなど、nRF Connect SDK アプリケーションをビルドするために連携して動作するツールの集合です。 VS Code 用 nRF Connect を初めて開くと、ツールチェーンのインストールを促すメッセージが表示されます。これは通常、拡張機能がコンピュータ上にインストールされたツールチェーンを検出できない場合に発生します。 「Install Toolchain」をクリックすると、コンピュータにダウンロードしてインストールできるツールチェーンバージョンの一覧が表示されます。使用する予定の nRF Connect SDK のバージョンに一致するツールチェーンのバージョンを選択してください。常に最新のタグ付きバージョンの nRF Connect SDK を使用することを推奨します。
デフォルトでは、VS Code 用 nRF Connect はツールチェーンの Released タブ(つまり安定版)だけを表示します。新機能を評価しており、Preview タブや他の種類のタブ(例:Customer Sampling -cs)を使用したい場合は、次のように「Show all toolchain versions」をクリックします。
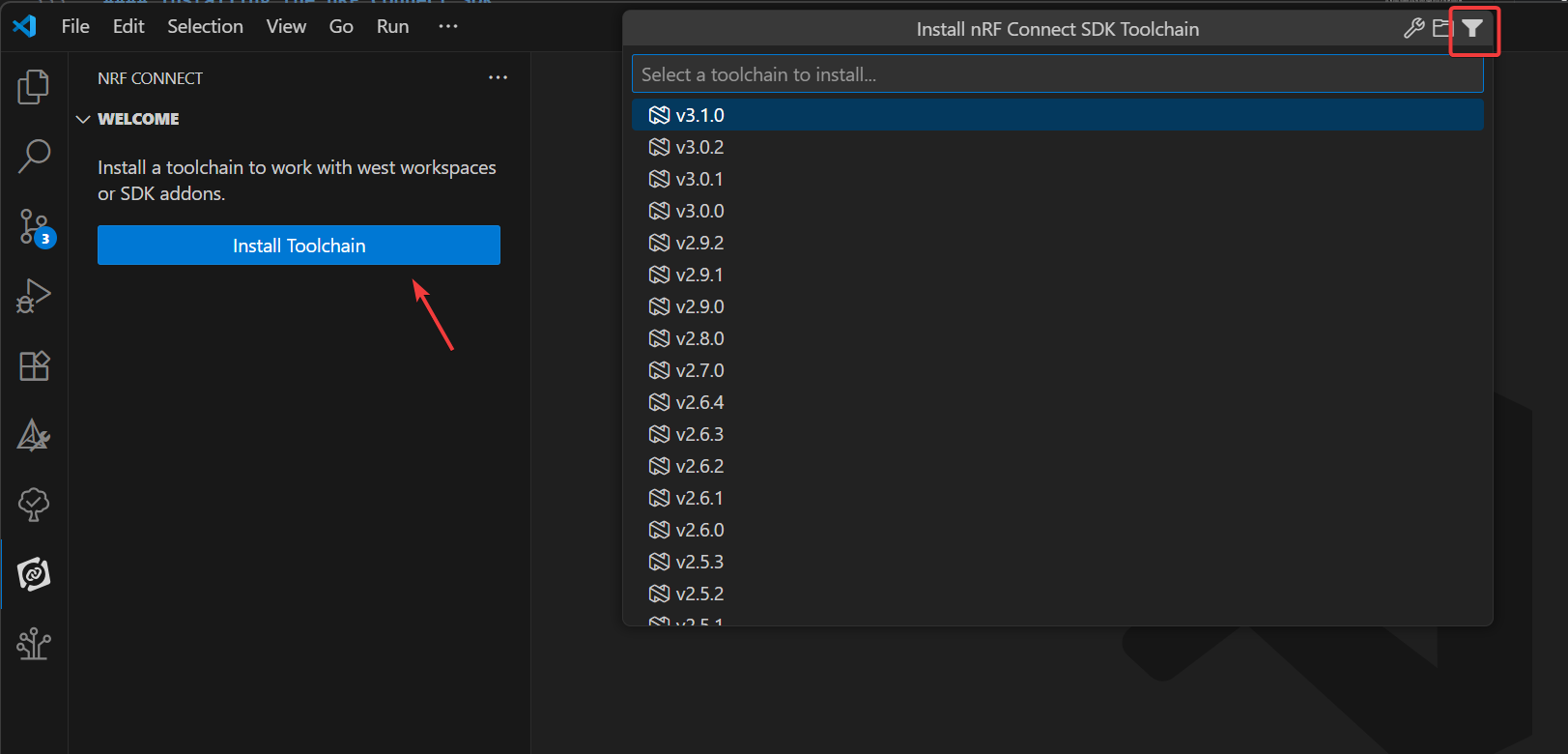
ここでの ToolChain は 3.0.1 以上です
nRF Connect SDK のインストール
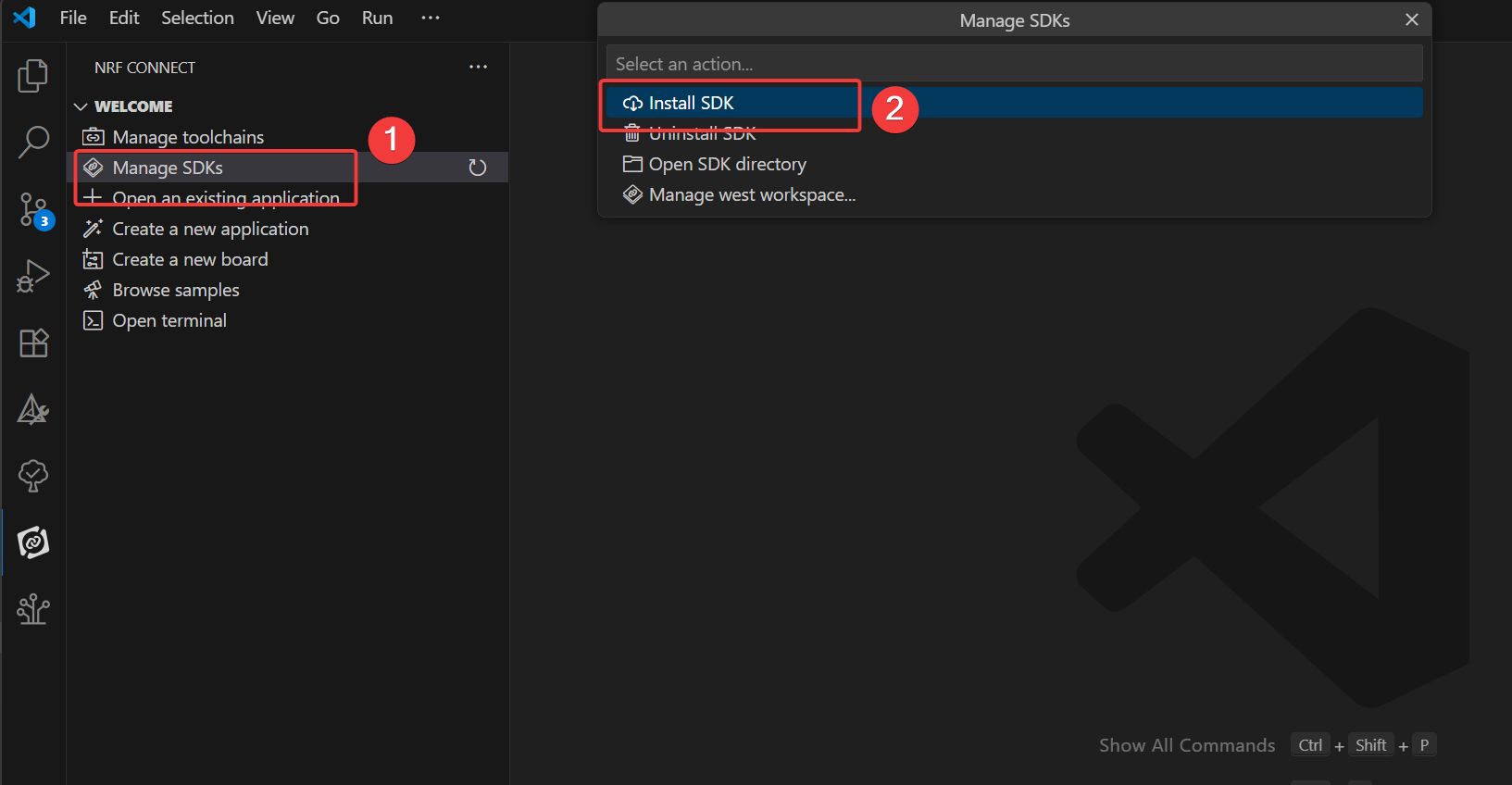
VS Code 用 nRF Connect 拡張機能で、Manage SDK をクリックします。Manage SDK メニューから、nRF Connect SDK バージョンをインストールまたはアンインストールできます。今回が拡張機能を初めて使用する場合、インターフェースには 2 つのオプションのみが表示されます。
Install SDK をクリックすると、ローカルにダウンロードしてインストールできるすべての nRF Connect SDK バージョンが一覧表示されます。プロジェクトの開発に必要な nRF Connect SDK のバージョンを選択してください。
VS Code で SDK フォルダを開いている場合は、Manage SDK メニューオプションの代わりに Manage west workspace が表示されます。この問題を解決するには、VS Code で別のウィンドウまたはフォルダを開いてください。
ここでの nRF Connect SDK は 3.0.1 以上です
これらのオプションのいずれも表示されない場合は、VS Code 用 nRF Connect 拡張パッケージの最新バージョンがインストールされていることを確認してください。 重要な点として、nRF Connect SDK は IDE に依存しないため、任意の IDE を使用することも、まったく使用しないこともできます。nRF Connect SDK は https://www.nordicsemi.com/Products/Development-tools/nRF-Util(nrfutil)コマンドラインインターフェース(CLI)を通じて入手でき、この CLI が nRF Connect をダウンロードしてインストールします。しかし、VS Code と組み合わせて nRF Connect for VS Code 拡張機能を使用することを強く推奨します。これは、便利なグラフィカルユーザーインターフェース(GUI)と効率的なコマンドラインインターフェース(CLI)を統合しているだけでなく、ファームウェア開発を大幅に簡素化する多くの機能も含んでいるためです。nRF Connect SDK を他の IDE で動作させるには、ここで扱う範囲を超えた追加の手動設定が必要になります。
ユーザープログラムの作成
この演習では、blinky サンプルに基づいたシンプルなアプリケーションを作成し、開発ボード上の LED の点滅を制御します。同じ手順は、すべての対応 Nordic Semiconductor 開発ボード(nRF54、nRF53、nRF52、nRF70、nRF91 シリーズ)に適用できます。目的は、サンプルをビルドして書き込むために必要なすべてのツールが正しくセットアップされていることを確認することです。ここでは、「Copy Example」テンプレートを使用してアプリケーションを作成し、ビルドし、Nordic チップ開発ボードに書き込む方法を学ぶことに重点を置きます。
- VS Code で nRF Connect 拡張機能アイコンをクリックします。Welcome ビューで、Create New Application をクリックします。
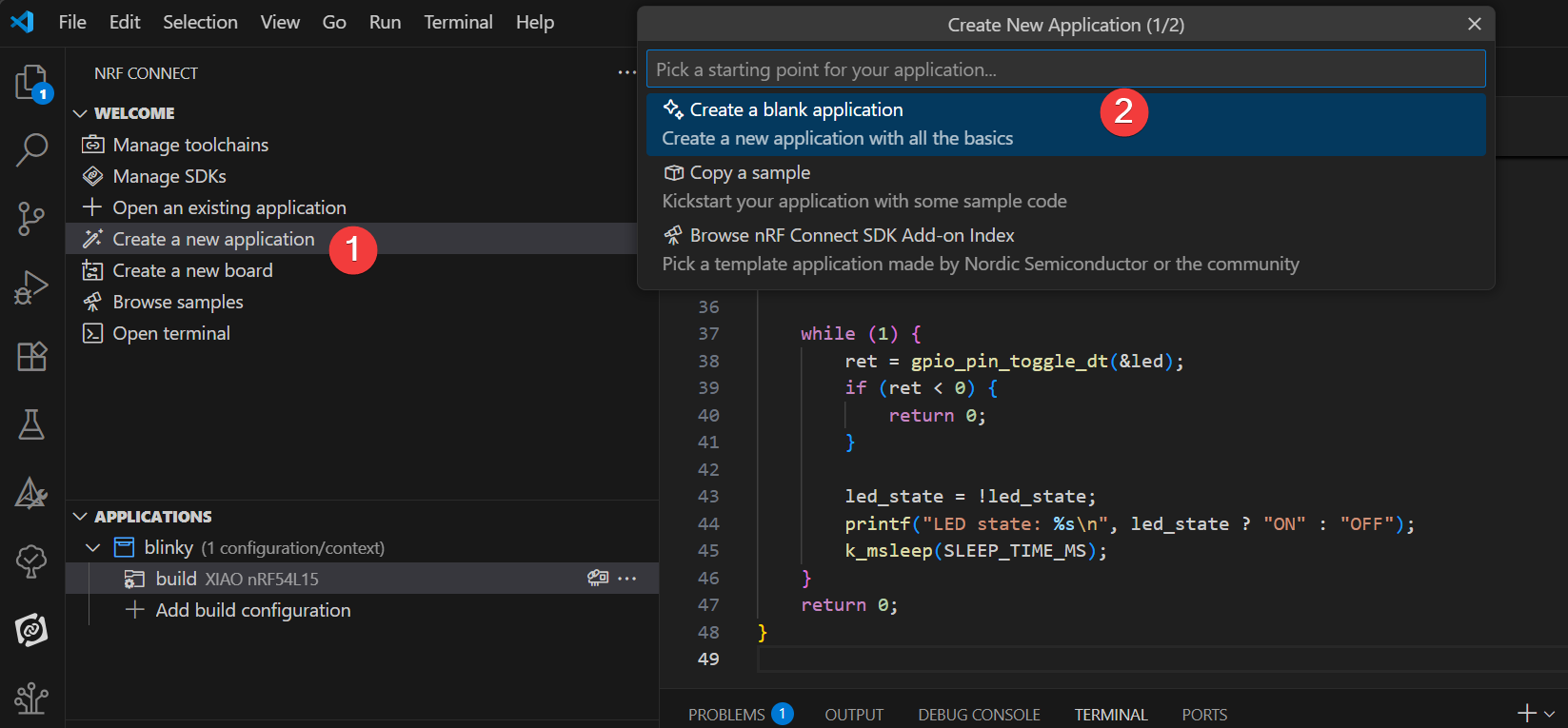
- 検索バーに blinky と入力し、下図のように 2 番目の Blinky サンプル(パス zephyr/samples/basic/blinky)を選択します。
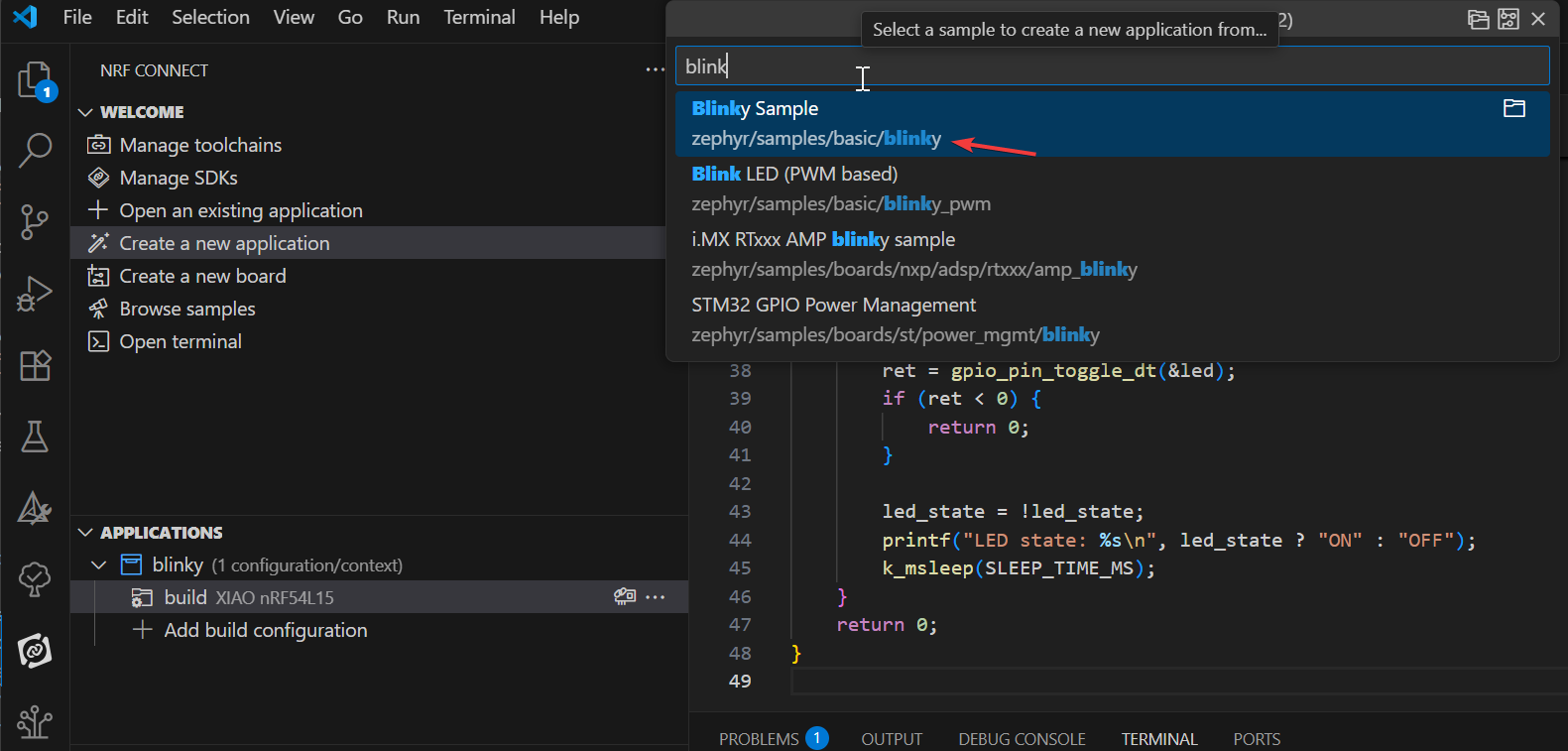
Blinky サンプルは、開発ボード上の LED1 を連続的に点滅させます。 最初のアプリケーションは Blinky サンプルをベースにします。Blinky サンプルは nRF Connect SDK 内の Zephyr モジュールブロックから派生しているため、サンプルパスには zephyr\samples\basic\blinky のように zephyr という名前が含まれています。
XIAO nRF54L15 ボードの追加
開始するには、GitHub リンクからリポジトリをクローンgit clone https://github.com/Seeed-Studio/platform-seeedboards.git して、任意のローカルフォルダに保存します。クローンが完了したら、platform-seeedboards/zephyr/ ディレクトリに移動します。この zephyr フォルダのパスを覚えておいてください。
VS Code で nRF Connect 用にボードを設定するには、次の手順に従います:
-
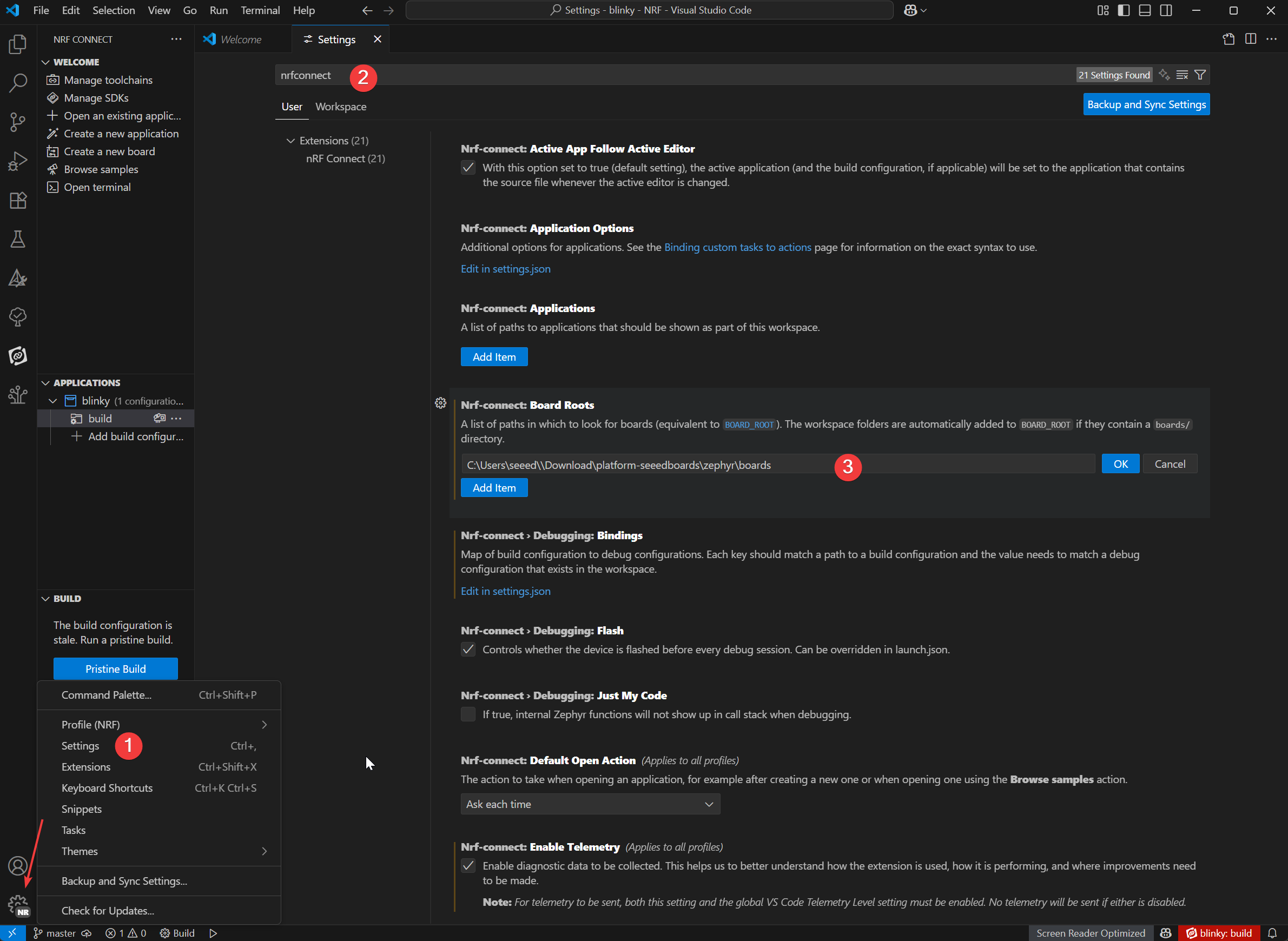
VS Code を開き、Settings に移動します。
-
検索ボックスに nRF Connect と入力します。
-
Board Roots 設定項目を見つけ、Edit in settings.json をクリックします。
-
ダウンロードした XIAO nRF54L15 ボードファイルの
zephyrパスを boardRoots 配列に追加します。
-
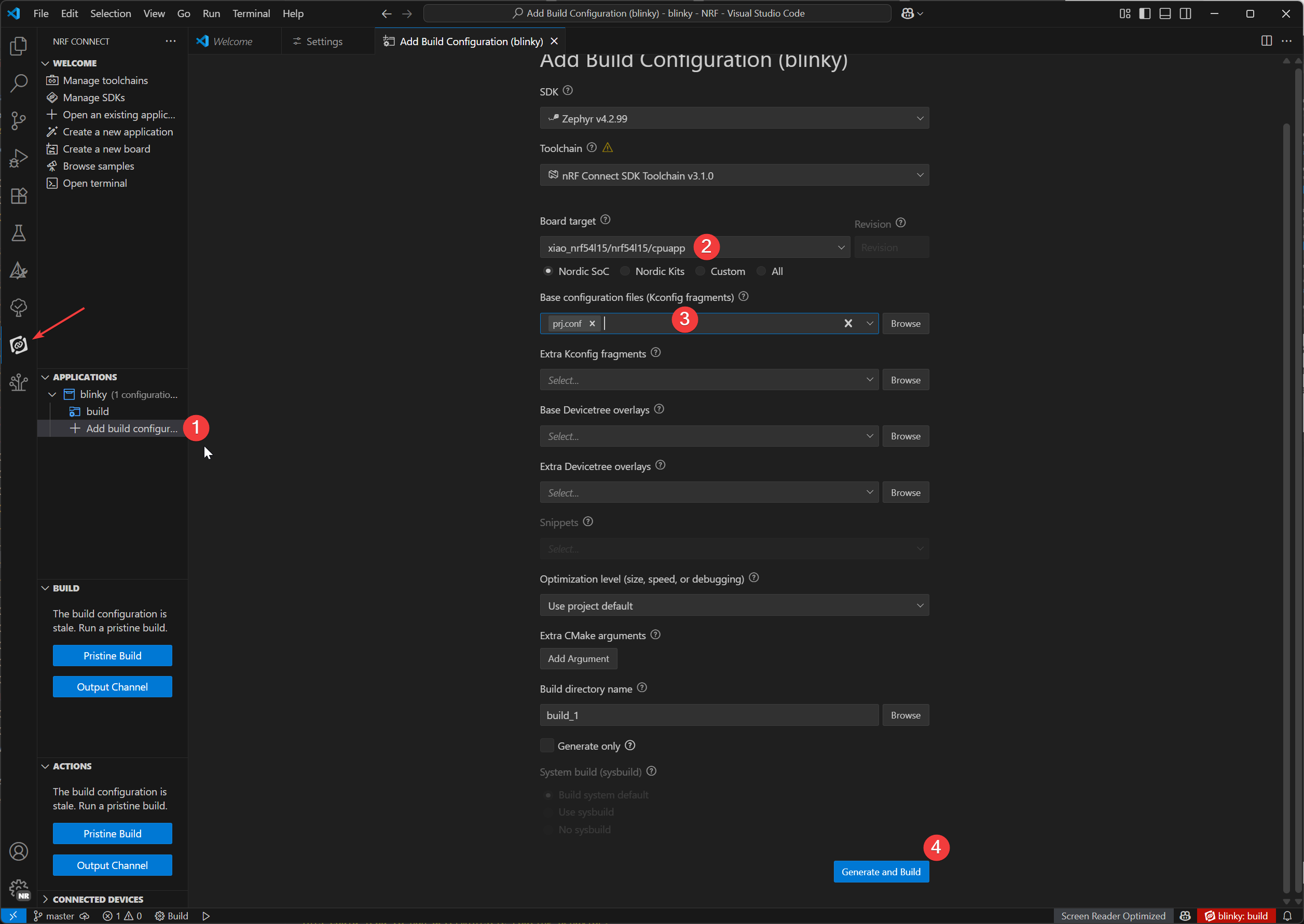
アプリケーションビューで、アプリケーション名の下にある Add Build Configuration をクリックします。
-
Board target で XIAO nRF54L15 のモデルを選択し、Base configuration files でデフォルトの prj.config ファイルを選択し、最後に
Generate and Buildをクリックしてファイルをビルドします。
書き込み用プラグインのダウンロード
- Window
- Mac OS
追加プラグイン:
Windows では、Chocolatey パッケージマネージャーを使用して OpenOCD をインストールします。
1.PowerShell を開く(管理者として実行):
- Windows の検索バーに「PowerShell」と入力します。
- 「Windows PowerShell」を右クリックし、「管理者として実行」を選択します。
2.PowerShell の実行ポリシーを確認:
Get-ExecutionPolicyと入力して Enter を押します。Get-ExecutionPolicy -Listと入力して Enter を押します。
3.Chocolatey をインストール:
- 次のコマンドを貼り付けて実行します:
Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager]::SecurityProtocol = [System.Net.ServicePointManager]::SecurityProtocol -bor 3072; iex ((New-Object System.Net.WebClient).DownloadString('https://community.chocolatey.org/install.ps1'))
このコマンドは、現在の PowerShell セッションの実行ポリシーを一時的に無視して Chocolatey をインストールします。インストール後、PowerShell ウィンドウを閉じて再度開きます(引き続き管理者として実行します)。
4.OpenOCD をインストール:
- 新しい PowerShell ウィンドウ(管理者として)で、次を入力します:
choco install openocd
5.OpenOCD のインストールを確認:
-
Get-Command openocdと入力して Enter を押します。 -
インストールが成功していれば、このコマンドは openocd.exe へのパスを表示します。
追加プラグイン:
macOS では、Homebrew パッケージマネージャーを使用して必要なツールをインストールします。
1.Homebrew をインストール(未インストールの場合):
-
Terminal.app を開きます。
-
次のコマンドを実行します:
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
- 画面の指示に従います。macOS のユーザーパスワードを入力する必要がある場合があります。インストール後、ターミナルに表示されるコマンドを実行して、Homebrew を PATH 環境変数に追加します(例:
(e.g., eval "$(/opt/homebrew/bin/brew shellenv)"))。その後、ターミナルを閉じて再度開きます。
2.Ccache をインストール:
ターミナルで次を入力します:
brew install ccache
3.OpenOCD をインストール:
ターミナルで次を入力します:
brew install openocd
4.OpenOCD のインストールを確認:
-
which openocdと入力して Enter を押します。 -
インストールが成功していれば、このコマンドは
openocd実行ファイルへのパスを表示します。
West Flash 書き込みプログラム
-
nRF ターミナルを開きます
-
west flashコマンドを入力するだけで、デバイスに書き込みが行えます。デバイスに書き込むには、単に west flash コマンドを入力します。赤でハイライトされているパスは、コンパイルされた .elf ファイルの場所を示しています。同じパスを使用して、J-Link デバッガでの書き込みに適した対応する .hex ファイルを見つけることができます。
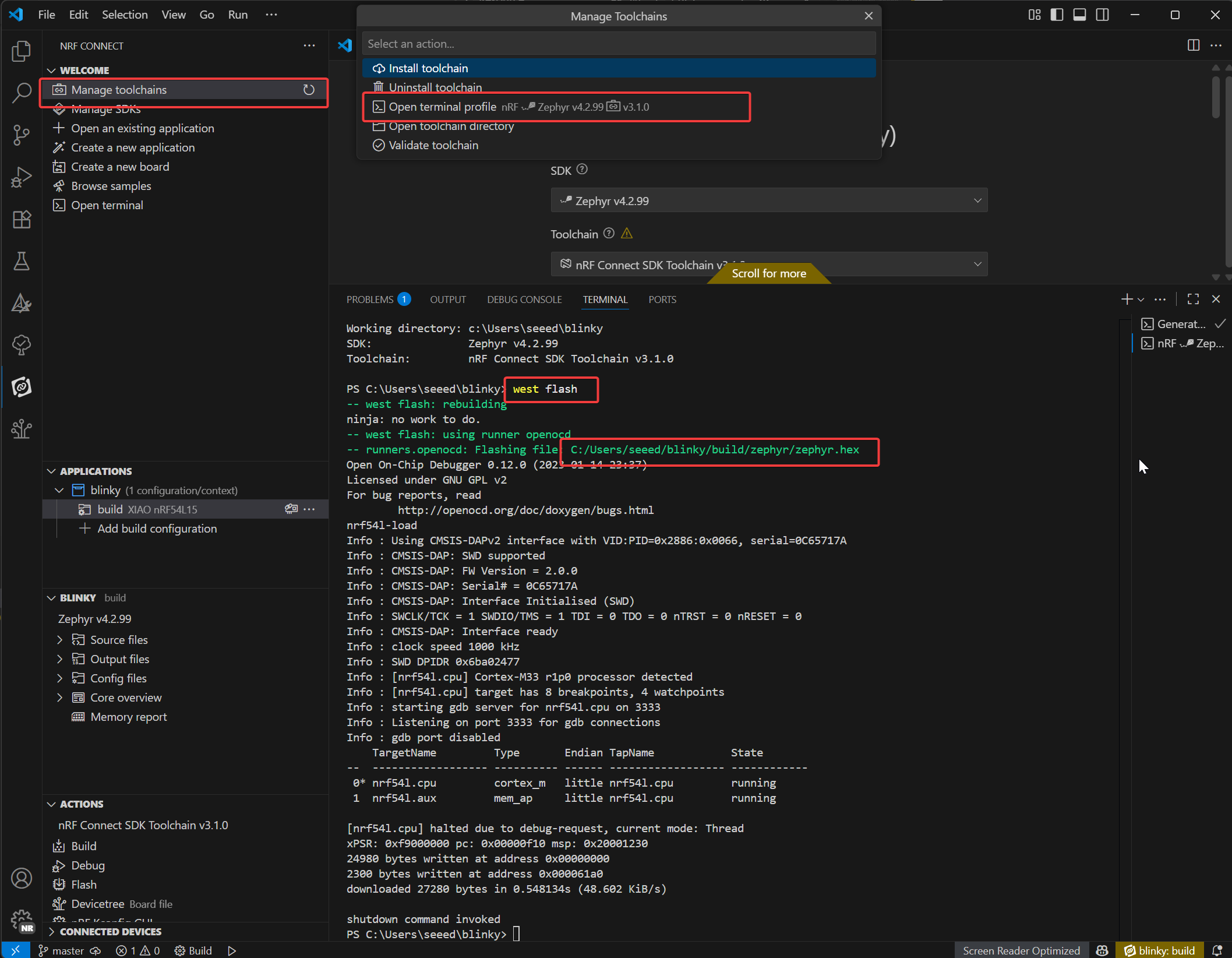
west flash エラーが発生する場合、VS Code の CMake プラグインと競合していることを意味するため、CMake プラグインを削除する必要があります。

Seeed Studio XIAO nRF54L15 Sense にプログラムの書き込みが正常に完了すると、ボード上部のユーザーインジケータが緑色の点滅を止めずに光っているのが確認できます。あなたのボードも同じように点滅していれば、書き込みが成功したことを意味します!🎊
Blinky プログラムの説明
/*
* Copyright (c) 2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <stdio.h>
#include <zephyr/kernel.h>
#include <zephyr/drivers/gpio.h>
/* 1000 msec = 1 sec */
#define SLEEP_TIME_MS 1000
/* The devicetree node identifier for the "led0" alias. */
#define LED0_NODE DT_ALIAS(led0)
/*
* A build error on this line means your board is unsupported.
* See the sample documentation for information on how to fix this.
*/
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);
int main(void)
{
int ret;
bool led_state = true;
if (!gpio_is_ready_dt(&led)) {
return 0;
}
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
if (ret < 0) {
return 0;
}
while (1) {
ret = gpio_pin_toggle_dt(&led);
if (ret < 0) {
return 0;
}
led_state = !led_state;
printf("LED state: %s\n", led_state ? "ON" : "OFF");
k_msleep(SLEEP_TIME_MS);
}
return 0;
}
LED デバイス定義:
#define LED0_NODE DT_ALIAS(led0): 「led0」エイリアスに対応するデバイスツリーノード識別子を取得し、ハードウェア非依存で LED を参照できるようにします。static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios): デバイスツリーノードを使用して GPIO 仕様構造体(led)を作成し、LED のハードウェア詳細(ピン、ポート)を保持します。ここでビルドエラーが発生する場合は、ハードウェアがサポートされていないことを示します。
main() 関数の初期化:
-
変数の設定:
int ret: 関数の戻り値を格納し、処理の成功可否を確認します。bool led_state = true: LED の状態を追跡します(初期値は「ON」)。
-
GPIO 準備状態の確認:
if (!gpio_is_ready_dt(&led)) { return 0; }: LED の GPIO ハードウェア(ドライバがロードされているかなど)が準備完了かを確認します。準備ができていない場合は終了します。
-
GPIO 設定:
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE): LED の GPIO ピンをアクティブ High の出力として設定します。- 失敗した場合(
ret < 0)は、不正な操作を防ぐために終了します。
メインループ:
無限ループ while (1) 内で LED を一定周期でトグルします:
-
LED 状態のトグル:
ret = gpio_pin_toggle_dt(&led): LED の GPIO 出力を反転します(ON ↔ OFF)。失敗した場合は終了します。
-
状態管理の更新:
led_state = !led_state: ソフトウェア上の状態フラグをハードウェアの状態と同期させます。
-
ログ出力とディレイ:
printf("LED state: %s\n", led_state ? "ON" : "OFF"): 現在の LED 状態をシリアル出力に表示します。k_msleep(SLEEP_TIME_MS): Zephyr の RTOS ディレイ関数を使用して 1000ms(1 秒)待機し、点滅周期を制御します。
nRF Connect SDK 内部の深掘り
nRF Connect SDK の内部原理をより深く理解したい場合は、次のコースを参照してください:
工場出荷時設定に戻す
XIAO nRF54L15 ボードには、ボードが不安定な状態(例:内部 NVM の書き込み保護によりアップロードできない場合)から復旧するためのファクトリリセットスクリプトが用意されています。このスクリプトはフラッシュの一括消去を行い、工場出荷時ファームウェアを書き込みます。
場所 スクリプトは scripts/factory_reset/ ディレクトリにあります。 使用方法 このスクリプトは、必要なツールをインストールするためのローカル Python 仮想環境を自動的に作成および管理するため、すぐに実行できます。
Window
- Windows の場合:scripts/factory_reset ディレクトリに移動して、次を実行します:
.\factory_reset.bat
Linux-MacOS
- Linux および macOS の場合:scripts/factory_reset ディレクトリに移動して、次を実行します:
bash factory_reset.sh
ワイヤレス切り替えモード
このサンプルでは、Seeed Studio XIAO nRF54L15 上の RF スイッチを制御して、オンボードのアンテナを切り替える方法を示します。
::: 次のサンプルは PlatformIO と nRF Connect SDK の両方で動作します。PlatformIO ではそのまま使用できますが、SDK ではファイルを手動で追加する必要があります。このリンクを参照してください。 :::
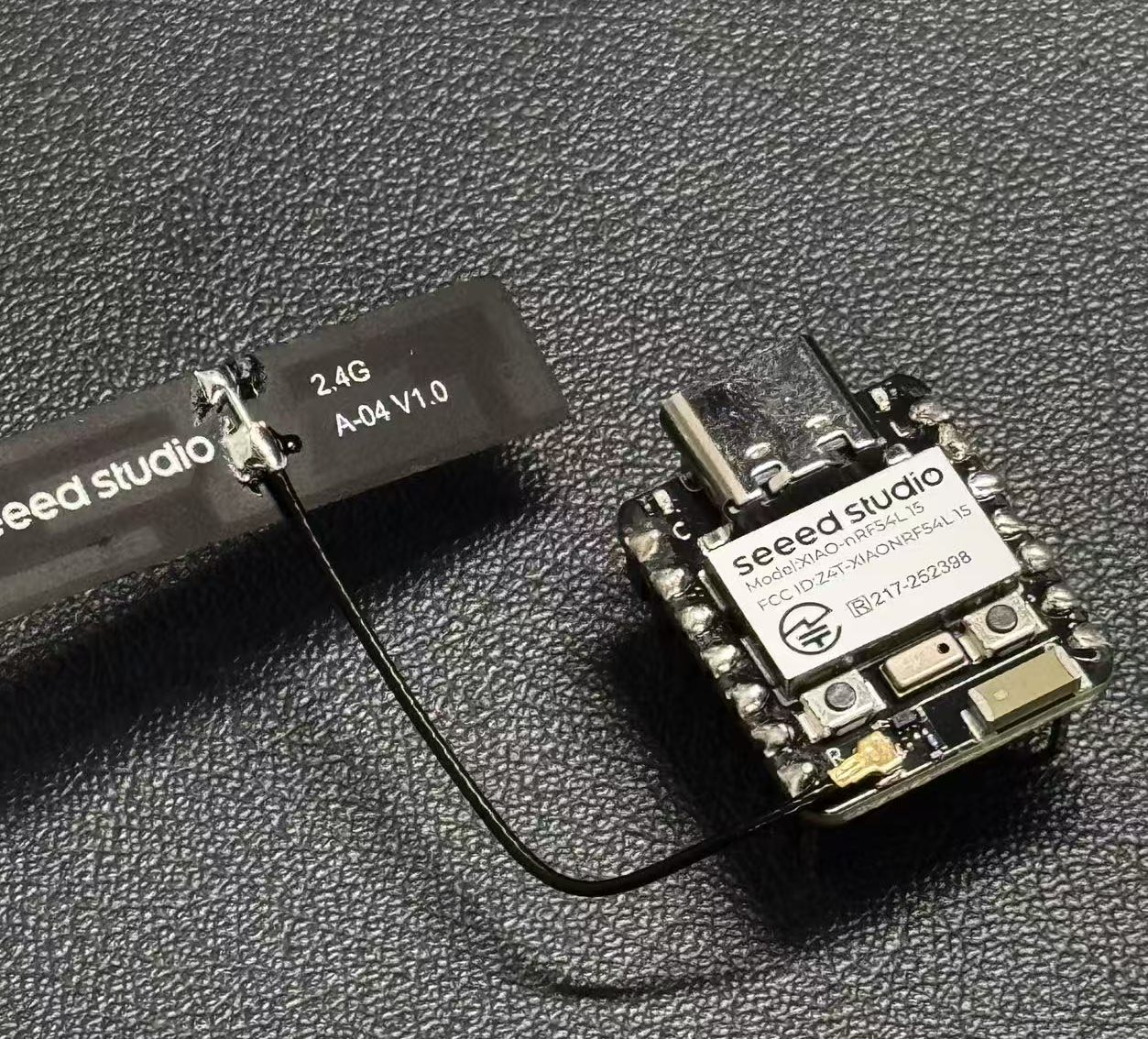
外部アンテナ
-
セラミックアンテナと外部アンテナ。
-
ユーザーボタン(SW0)を押すことで、セラミックアンテナと外部アンテナを切り替えます。
-
ユーザー LED は現在選択されているアンテナを示します(外部アンテナの場合は LED が点灯、セラミックアンテナの場合は LED が消灯)。
-
起動時のデフォルトアンテナは prj.conf で設定できます。
/*
* Copyright (c) 2024 Seeed Technology Co.,Ltd
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/logging/log.h>
#include <zephyr/devicetree.h>
LOG_MODULE_REGISTER(app, CONFIG_LOG_DEFAULT_LEVEL);
/* Devicetree node identifiers */
#define RFSW_REGULATOR_NODE DT_NODELABEL(rfsw_ctl)
#define SW0_NODE DT_ALIAS(sw0)
#define LED0_NODE DT_ALIAS(led0)
/* State variables */
static uint8_t onoff_flag = 0;
#ifdef CONFIG_DEFAULT_ANTENNA_EXTERNAL
static bool is_external_antenna = true;
#else
static bool is_external_antenna = false;
#endif
/* GPIO device specs */
/* Manually build gpio_dt_spec for rfsw_ctl */
static const struct gpio_dt_spec rfsw_gpio = {
.port = DEVICE_DT_GET(DT_GPIO_CTLR(RFSW_REGULATOR_NODE, enable_gpios)),
.pin = DT_GPIO_PIN(RFSW_REGULATOR_NODE, enable_gpios),
.dt_flags = DT_GPIO_FLAGS(RFSW_REGULATOR_NODE, enable_gpios),
};
static const struct gpio_dt_spec button = GPIO_DT_SPEC_GET(SW0_NODE, gpios);
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);
/* Button callback data */
static struct gpio_callback button_cb_data;
/* Forward declarations */
void button_pressed(const struct device *dev, struct gpio_callback *cb, uint32_t pins);
void update_antenna_switch(void);
/* Function to update antenna switch and LED */
void update_antenna_switch(void)
{
int ret;
is_external_antenna = !is_external_antenna;
if (is_external_antenna) {
/* Switch to external antenna */
LOG_INF("Switching to External Antenna");
// To get a physical high level (Inactive state), we need to set the logic to '0'
ret = gpio_pin_set_dt(&rfsw_gpio, 0);
if (ret < 0) {
LOG_ERR("Error setting rfsw-ctl to physical HIGH: %d\n", ret);
}
// Turn on the LED (set 0 for on)
ret = gpio_pin_set_dt(&led, 0);
if (ret < 0) {
LOG_ERR("Error turning on LED: %d\n", ret);
}
} else {
/* Switch back to ceramic antenna */
LOG_INF("Switching to Ceramic Antenna");
// To get a physical low level (Active state), we need to set the logic to '1'
ret = gpio_pin_set_dt(&rfsw_gpio, 1);
if (ret < 0) {
LOG_ERR("Error setting rfsw-ctl to physical LOW: %d\n", ret);
}
// Turn off the LED (set 1 for off)
ret = gpio_pin_set_dt(&led, 1);
if (ret < 0) {
LOG_ERR("Error turning off LED: %d\n", ret);
}
}
}
/* Button pressed callback function */
void button_pressed(const struct device *dev, struct gpio_callback *cb,
uint32_t pins)
{
update_antenna_switch();
}
int main(void)
{
int ret;
/* Check if GPIO devices are ready */
if (!gpio_is_ready_dt(&rfsw_gpio)) {
LOG_ERR("RF switch control GPIO not ready\n");
return -1;
}
if (!gpio_is_ready_dt(&button)) {
LOG_ERR("Button GPIO not ready\n");
return -1;
}
if (!gpio_is_ready_dt(&led)) {
LOG_ERR("LED GPIO not ready\n");
return -1;
}
/* Configure GPIO pins */
ret = gpio_pin_configure_dt(&rfsw_gpio, GPIO_OUTPUT);
if (ret < 0) {
LOG_ERR("Error configuring rfsw-ctl: %d\n", ret);
return ret;
}
/* Configure LED as output, default off */
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
if (ret < 0) {
LOG_ERR("Error configuring LED: %d\n", ret);
return ret;
}
/* Set initial LED state based on antenna selection */
if (is_external_antenna) {
// External antenna
LOG_INF("Initial state: External Antenna");
ret = gpio_pin_set_dt(&rfsw_gpio, 0);
if (ret < 0) {
LOG_ERR("Error setting rfsw-ctl to physical HIGH: %d\n", ret);
}
ret = gpio_pin_set_dt(&led, 0); // Turn on LED
if (ret < 0) {
LOG_ERR("Error turning on LED: %d\n", ret);
}
} else {
// Ceramic antenna
LOG_INF("Initial state: Ceramic Antenna");
ret = gpio_pin_set_dt(&rfsw_gpio, 1);
if (ret < 0) {
LOG_ERR("Error setting rfsw-ctl to physical LOW: %d\n", ret);
}
ret = gpio_pin_set_dt(&led, 1); // Turn off LED
if (ret < 0) {
LOG_ERR("Error turning off LED: %d\n", ret);
}
}
/* Configure button as input */
ret = gpio_pin_configure_dt(&button, GPIO_INPUT);
if (ret < 0) {
LOG_ERR("Error configuring button: %d\n", ret);
return ret;
}
/* Configure button interrupt */
ret = gpio_pin_interrupt_configure_dt(&button, GPIO_INT_EDGE_TO_ACTIVE);
if (ret < 0) {
LOG_ERR("Error configuring button interrupt: %d\n", ret);
return ret;
}
/* Initialize button callback */
gpio_init_callback(&button_cb_data, button_pressed, BIT(button.pin));
gpio_add_callback(button.port, &button_cb_data);
LOG_INF("Antenna switch example started. Press SW0 to switch.\n");
return 0;
}
外部アンテナと内部アンテナを切り替えたい場合は、zephyr/prj.conf ファイルを変更する必要があります。
外部アンテナを有効にするには、# CONFIG_DEFAULT_ANTENNA_EXTERNAL=y のコメントを外します。内部アンテナを使用する場合は、この行をコメントアウトしてください。
CONFIG_GPIO=y
CONFIG_SERIAL=y
CONFIG_LOG=y
CONFIG_CONSOLE=y
CONFIG_UART_CONSOLE=y
CONFIG_SHELL_BACKEND_SERIAL=y
CONFIG_SHELL_BACKEND_DUMMY=n
CONFIG_PM_DEVICE=y
CONFIG_NRFX_POWER=y
CONFIG_POWEROFF=y
CONFIG_BT=y
CONFIG_BT_PERIPHERAL=y
CONFIG_BT_DEVICE_NAME="zephyr-ble"
# Enable this option to default to external antenna
# CONFIG_DEFAULT_ANTENNA_EXTERNAL=y
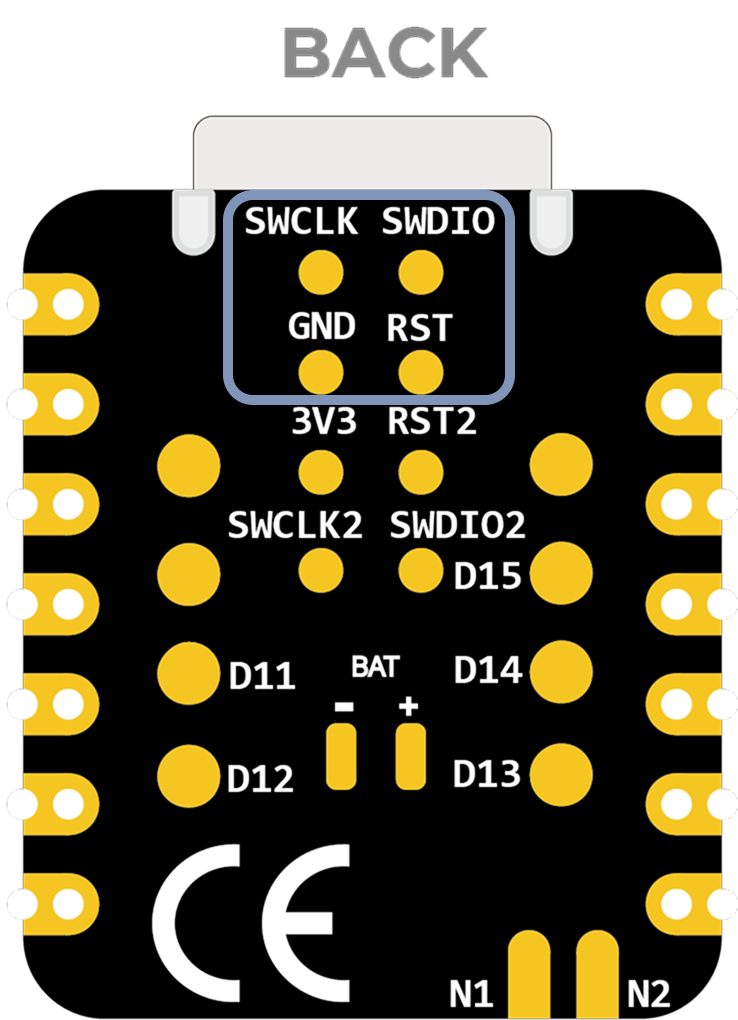
プログラム書き込み用に J-Link ピンへアクセスする
JLink を使って書き込みを行いたい場合は、以下の手順に従ってください。ただし、プログラミングには Seeed Stduio XIAO nRF54L15 ボードに内蔵されているシリアルポートを使用することを推奨します。その方がはるかに便利です。
必要なハードウェア
nRF54L15 モデルボードをサポートするには、最新バージョンの J-Link をダウンロードする必要があります。
必要なソフトウェア
Web サイトから Segger ソフトウェアをダウンロードする必要があります。
- ステップ 1. 以下のピンに Jlink を接続します:
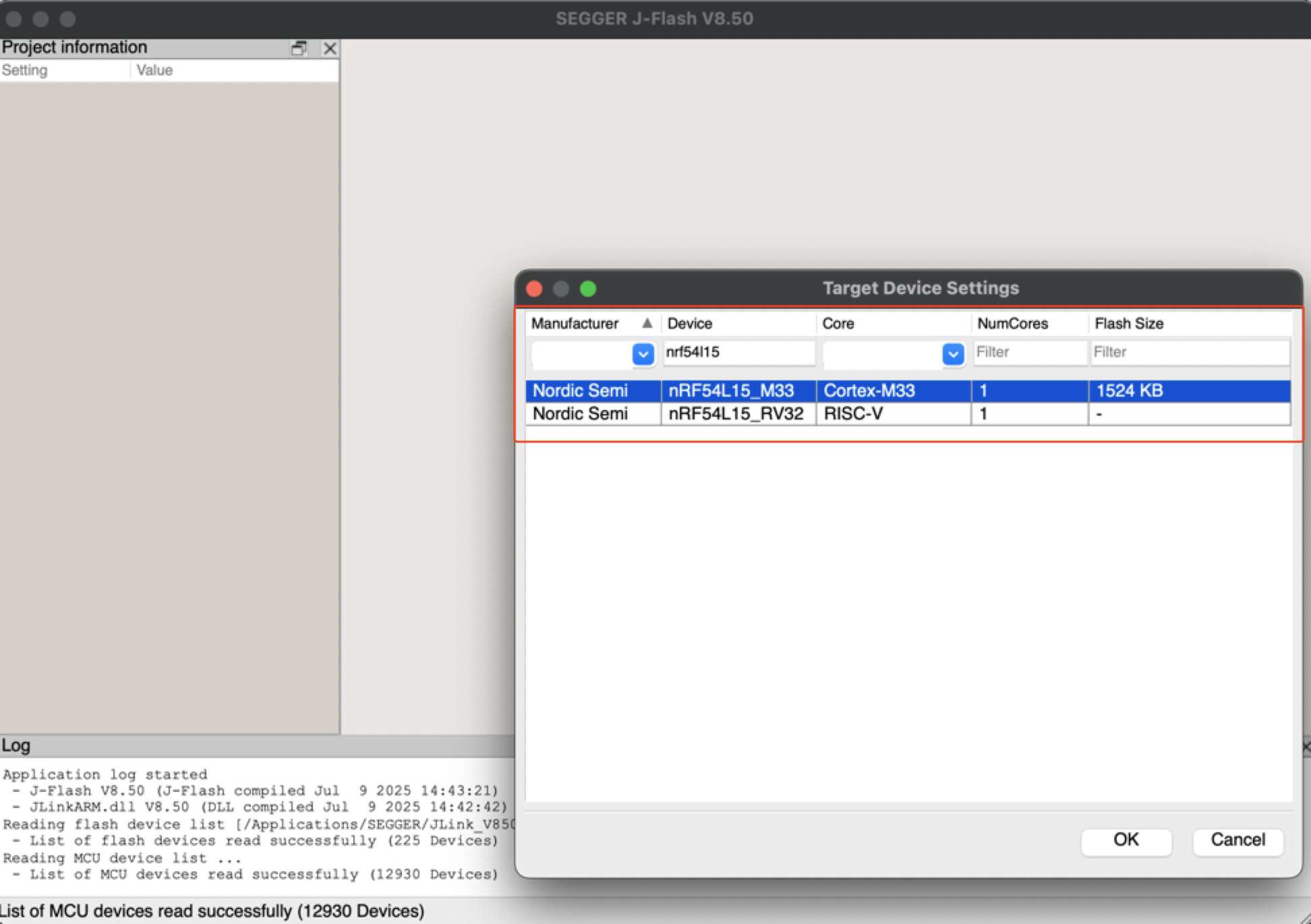
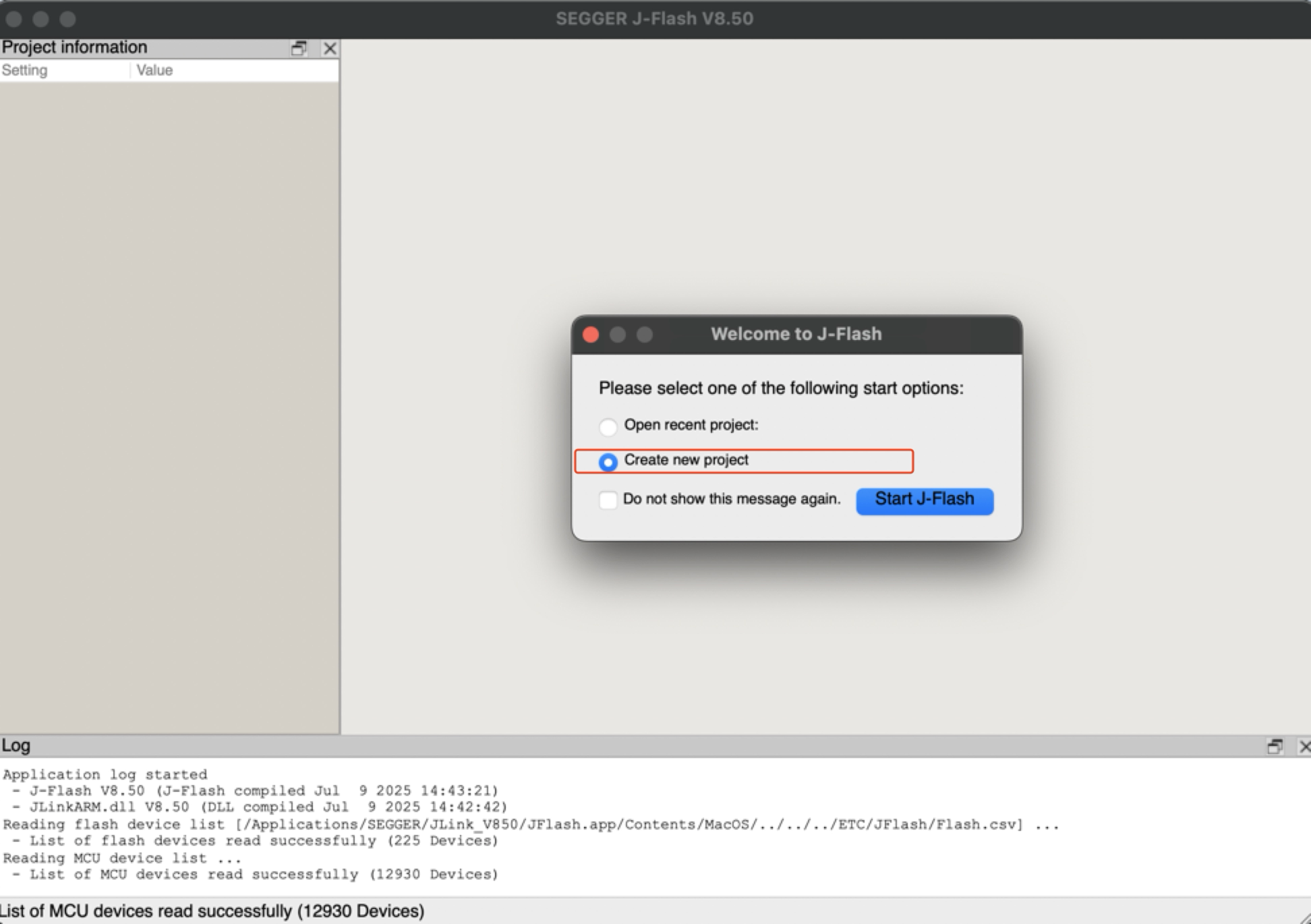
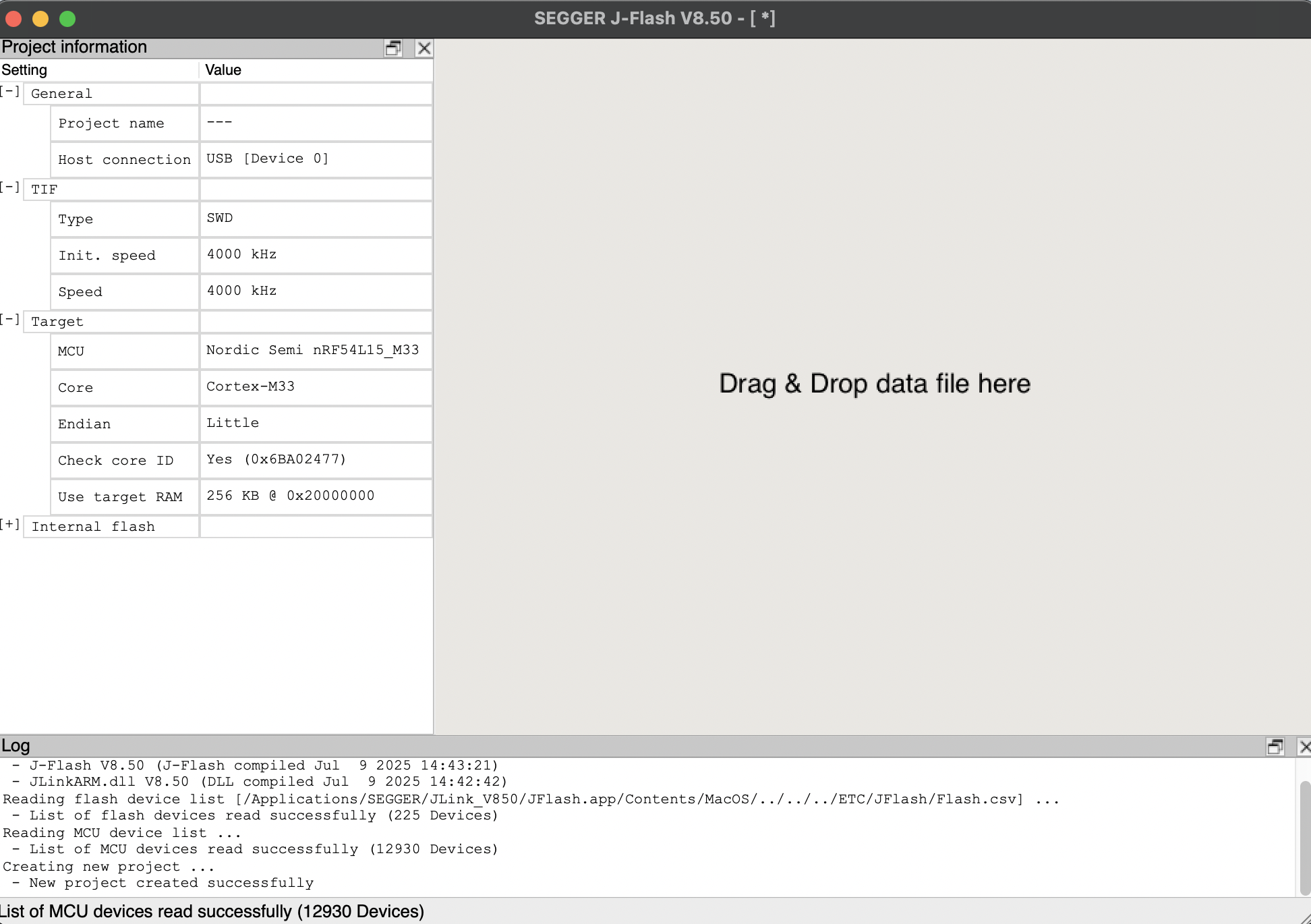
- ステップ 2. J-Flash を起動し、nRF54L15_M33 を検索して新しいプロジェクトを作成します:
- ステップ 3. "Target" をクリックし、"Connect" を選択します。
- ステップ 4. bin または hex ファイル をソフトウェアにドラッグします。その後、F4 と F5 をこの順番で押します。これで書き換えが完了します。
バッテリー駆動ボード
XIAO nRF54L15 には電源管理チップが内蔵されており、バッテリーを使用して XIAO nRF54L15 を単独で給電したり、XIAO nRF54L15 の USB ポートを介してバッテリーを充電したりすることができます。
XIAO 用にバッテリーを接続したい場合は、認証済みの充電式 3.7V リチウムバッテリーの購入をお勧めします。バッテリーをはんだ付けする際は、必ず正極と負極を正しく区別してください。
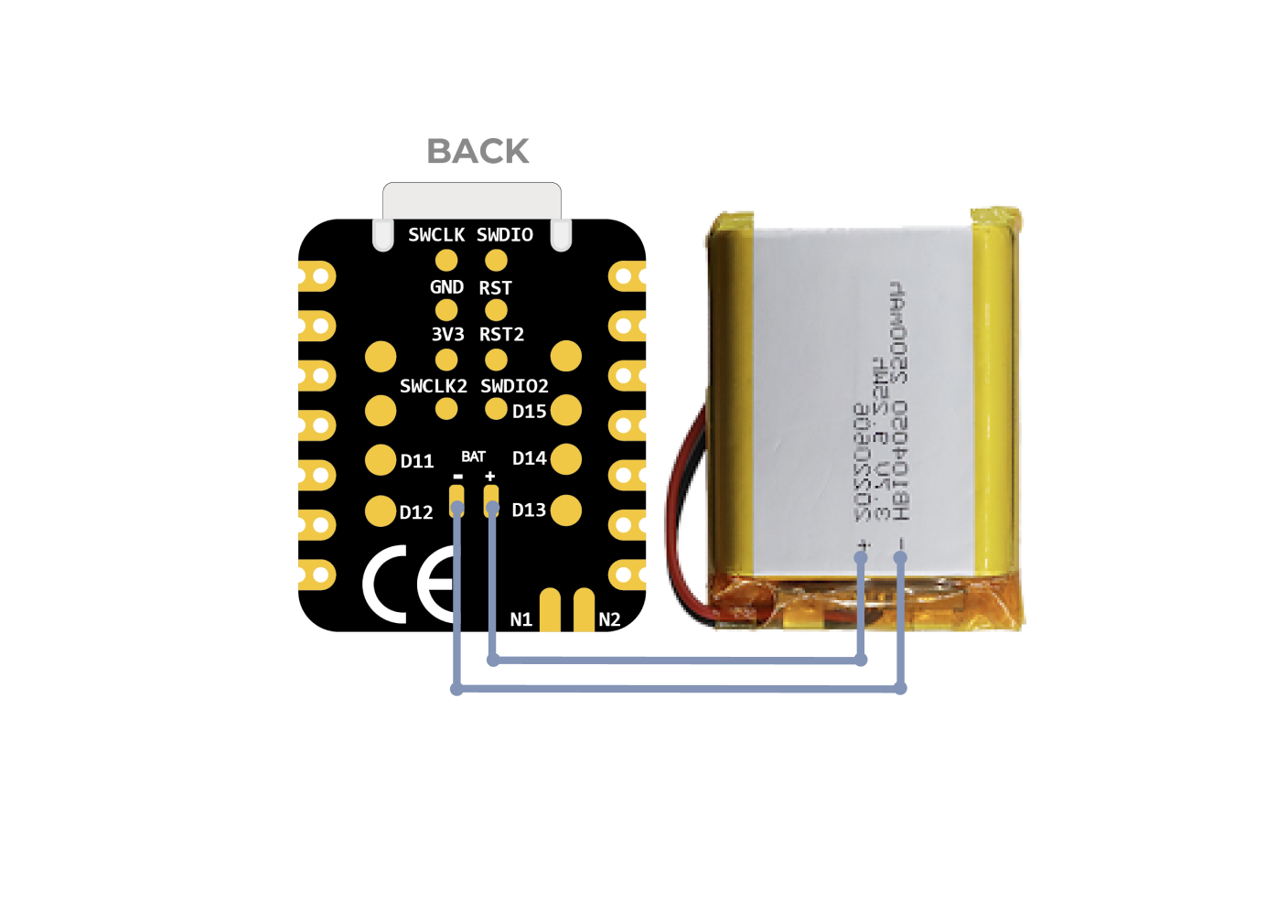
バッテリー接続回路図
バッテリー使用時の注意事項:
- 規格を満たした認証済みバッテリーを使用してください。
- バッテリー使用中でも、XIAO はデータケーブルを介してコンピュータ機器に接続できます。XIAO には保護回路チップが内蔵されており、安全に使用できます。
- XIAO nRF54L15 はバッテリー駆動時には(特定のプログラムを書き込んでいない限り)LED が点灯しません。LED の状態だけで XIAO nRF54L15 が動作しているかどうかを判断しないでください。必ずご自身のプログラムの挙動から適切に判断してください。
同時に、バッテリー充電用の赤色インジケーターを設計しており、このインジケーターの表示によって、充電中のバッテリーの現在の状態をユーザーに知らせます。
はんだ付けの際は、プラス端子とマイナス端子を短絡させてバッテリーや機器を損傷しないよう、十分注意してください。
バッテリー電圧検出
プログラムを書き込んだ後、3.7V リチウムバッテリーのみで給電した際に XIAO nRF54L15 が起動しない場合は、以下の解決策を参照してください。
現在のハードウェアバージョン(v1.0)では、ベンチデバッグ(USB 接続、UART 有効)とバッテリー運用(スタンドアロン、UART 無効)を簡単に切り替えられるよう、2 つのビルド構成を管理することを推奨します。
シナリオ A: USB ベンチデバッグ
使用するタイミング: コードの作成やファームウェアの書き込みを行い、USB シリアルポート経由でログを確認する必要があるとき。
設定(prj_uart.conf):
プロジェクトディレクトリに prj_uart.conf という名前の新しいファイルを作成します。このオーバーレイファイルは、デバッグ目的で一時的に UART を再有効化します。
# Enable UART for USB debugging
CONFIG_SERIAL=y
CONFIG_UART_CONSOLE=y
# Optional: Keep RTT enabled as a secondary logging backend
CONFIG_USE_SEGGER_RTT=y
CONFIG_RTT_CONSOLE=y
CONFIG_LOG_BACKEND_RTT=y
CONFIG_LOG_BACKEND_UART=y
ビルド方法: プロジェクトをビルドする際に、オーバーレイ設定の引数を追加します。
# Build with UART enabled for USB debugging
west build -p always -d build_uart -b xiao_nrf54l15/nrf54l15/cpuapp . -DOVERLAY_CONFIG="prj_uart.conf"
シナリオ B: バッテリー運用(デフォルト)
使用するタイミング: デバッグが完了し、バッテリーパッドのみでボードに給電する予定のとき。
設定(prj.conf):
メインの prj.conf ファイルを変更して、デフォルトで UART を無効にします。これにより、バッテリー給電時でもボードが正しく起動できるようになります。
# Disable UART to ensure successful boot on battery
CONFIG_SERIAL=n
CONFIG_UART_CONSOLE=n
# Use RTT for low-power logging (requires J-Link)
CONFIG_USE_SEGGER_RTT=y
CONFIG_RTT_CONSOLE=y
CONFIG_LOG=y
CONFIG_LOG_BACKEND_RTT=y
ビルド方法: オーバーレイ引数を付けずに通常どおりビルドします。
# Build default firmware (Battery Safe)
west build -p always -d build_batt -b xiao_nrf54l15/nrf54l15/cpuapp .
まとめ
- USB 接続時 シリアルモニタを有効にするために
prj_uart.confオーバーレイを使用します。 - バッテリー駆動時 デバイスが問題なく起動するよう、デフォルトの
prj.confを使用します。
XIAO nRF54L15 には、TPS22916CYFPR ロードスイッチを用いてバッテリー電力の測定を効率的に管理する、バッテリー電圧検出機能が統合されています。本ガイドでは、バッテリー検出のソフトウェア実装(特に main.c コード)の解析に焦点を当て、Zephyr NCS SDK の複雑さを回避しつつ、PlatformIO 環境でこの機能を簡単にデプロイして利用する方法を案内します。
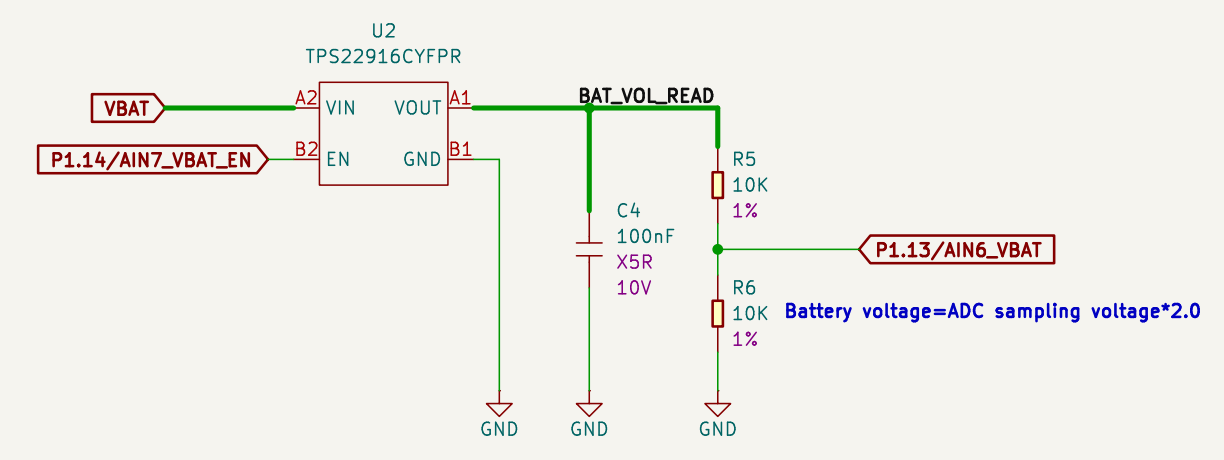
バッテリー検出回路図
TPS22916CYFPR チップの役割:
-
必要に応じてバッテリー電圧のオン・オフを制御するインテリジェント電源スイッチです。バッテリー電圧を測定する必要があるときはオンになり、バッテリーを分圧回路に接続します。測定する必要がないときはオフになり、その接続を切り離します。
-
この機能によって何ができるようになるのでしょうか? このオンデマンドのスイッチング機構により、チップは不要な電流消費を大幅に削減し、バッテリー寿命を効果的に延長します。後段の分圧回路と nRF54L15 の ADC(アナログ-デジタルコンバータ)を組み合わせることで、XIAO nRF54L15 はバッテリー残量を正確に監視でき、IoT デバイスなどのバッテリー駆動・低消費電力アプリケーションにおいて、重要な稼働時間最適化を実現します。
以下のサンプルコードは PlatformIO 向けに設計されていますが、nRF Connect SDK とも互換性があります。
PlatformIO での XIAO nRF54L15 の使用 PlatformIO で XIAO nRF54L15 を使用したい場合は、こちらのチュートリアルを参照して設定してください: XIAO nRF54L15 PlatformIO Configuration。
オーバーレイの追加と conf ファイルの変更
このバッテリー用ルーチンを nRF Connect SDK で使用したい場合は、app.overlay を追加し、prj.conf ファイルを変更する必要があります。
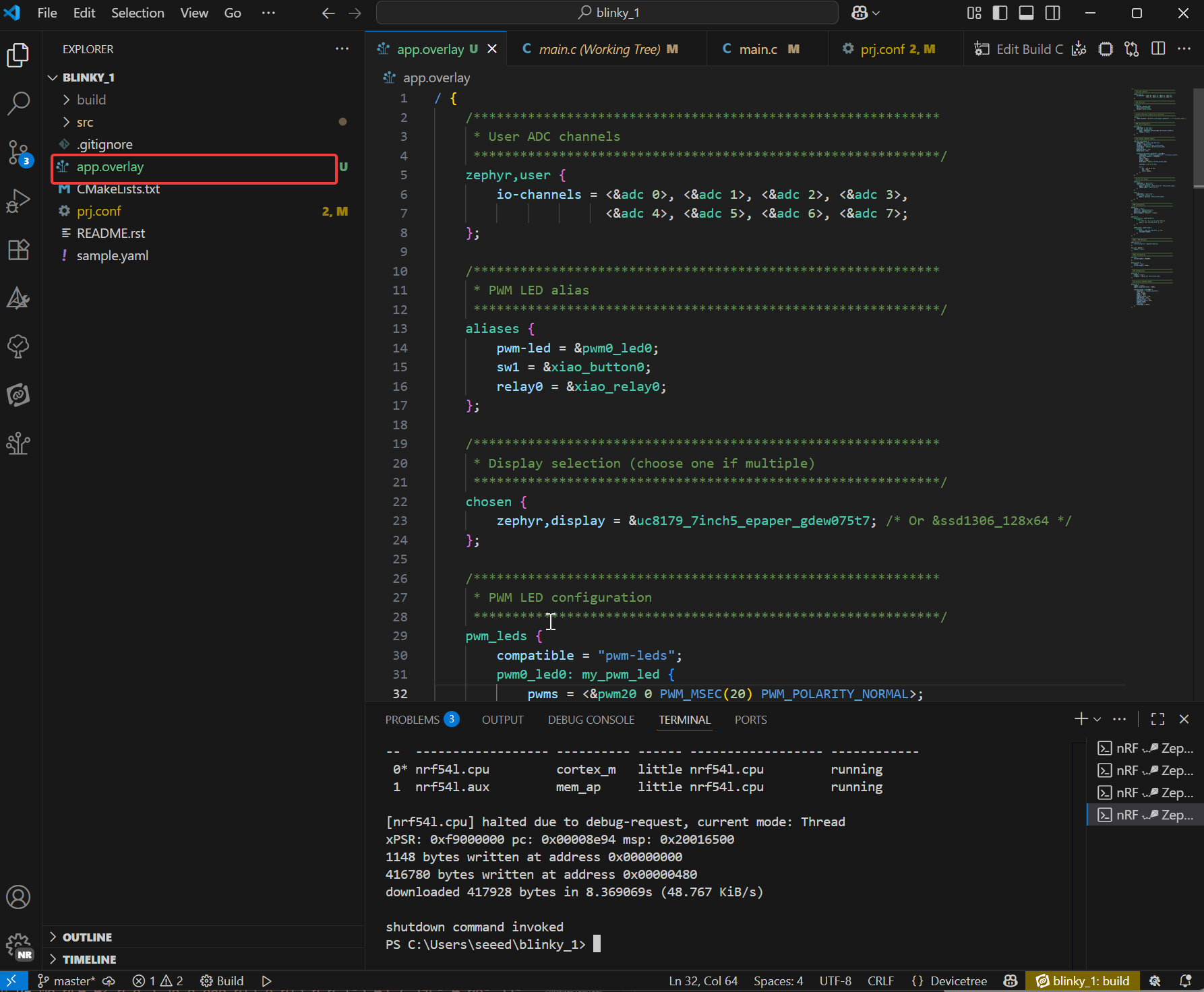
-
プロジェクトディレクトリ配下に
app.overlayという名前の新しいファイルを作成します。その後、以下のコードを貼り付け、最後に Ctrl + S を押して保存します。- オーバーレイファイルはハードウェア記述レイヤーを拡張し、デバイスツリーを通じて物理ハードウェアの接続をカスタマイズします。コードロジックを変更するのではなく、実際のハードウェアの詳細を宣言することで、ドライバが物理デバイスを正しく初期化できるようにします。
app.overlay コード
/ {
/*
* @brief Device Tree Overlay for XIAO nRF54L15
*
* This file customizes the base board device tree to configure
* peripherals for a specific application, including:
* - User-defined ADC channels
* - PWM-controlled LED
* - Buttons and a relay
* - E-paper display (UC8179) via SPI
* - OLED display (SSD1306) via I2C
*
* To switch between the two displays, simply uncomment one and comment
* out the other in the "chosen" node below.
*/
/************************************************************
* Aliases for easy access to devices in application code
************************************************************/
aliases {
pwm-led = &pwm0_led0;
sw1 = &xiao_button0;
relay0 = &xiao_relay0;
};
/************************************************************
* Display selection (choose one if multiple)
************************************************************/
chosen {
zephyr,display = &uc8179_7inch5_epaper_gdew075t7;
zephyr,display = &ssd1306_128x64;
};
/************************************************************
* PWM LED, Button, and Relay configuration
************************************************************/
pwm_leds {
compatible = "pwm-leds";
pwm0_led0: my_pwm_led {
// PWM channel 0 on PWM instance 20
// PWM_MSEC(20) sets a period of 20ms
pwms = <&pwm20 0 PWM_MSEC(20) PWM_POLARITY_NORMAL>;
status = "okay";
};
};
buttons {
compatible = "gpio-keys";
xiao_button0: button_0 {
// Connect to the XIAO nRF54L15 pin D1
// GPIO_PULL_UP ensures the pin is high when the button is not pressed
// GPIO_ACTIVE_LOW means the button press drives the pin low
gpios = <&xiao_d 1 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
zephyr,code = <INPUT_KEY_0>;
};
};
relay {
compatible = "gpio-leds";
xiao_relay0: relay_0 {
// Connect to the XIAO nRF54L15 pin D0
gpios = <&xiao_d 0 GPIO_ACTIVE_HIGH>;
};
};
/************************************************************
* Local nodes that don't modify existing ones
************************************************************/
zephyr,user {
io-channels = <&adc 0>, <&adc 1>, <&adc 2>, <&adc 3>,
<&adc 4>, <&adc 5>, <&adc 6>, <&adc 7>;
};
// MIPI-DBI SPI interface for the E-paper display
mipi_dbi_xiao_epaper {
compatible = "zephyr,mipi-dbi-spi";
spi-dev = <&xiao_spi>;
// D3 pin for Data/Command control
dc-gpios = <&xiao_d 3 GPIO_ACTIVE_HIGH>;
// D0 pin for Reset
reset-gpios = <&xiao_d 0 GPIO_ACTIVE_LOW>;
write-only;
#address-cells = <1>;
#size-cells = <0>;
uc8179_7inch5_epaper_gdew075t7: uc8179@0 {
compatible = "gooddisplay,gdew075t7", "ultrachip,uc8179";
// Max SPI frequency for the display
mipi-max-frequency = <4000000>;
reg = <0>;
width = <800>;
height = <480>;
// D2 pin for Busy signal from the display
busy-gpios = <&xiao_d 2 GPIO_ACTIVE_LOW>;
softstart = [17 17 17 17];
full {
pwr = [07 07 3f 3f];
cdi = <07>;
tcon = <0x22>;
};
};
};
};
/************************************************************
* Device fragments (modifying nodes from the base board DTS)
************************************************************/
// PWM instance 20
&pwm20 {
status = "okay";
pinctrl-0 = <&pwm20_default>;
pinctrl-1 = <&pwm20_sleep>;
pinctrl-names = "default", "sleep";
};
// GPIO pin control
&pinctrl {
pwm20_default: pwm20_default {
group1 {
// Configure PWM channel 0 on P1.04 pin (Pin D0)
psels = <NRF_PSEL(PWM_OUT0, 1, 4)>;
};
};
pwm20_sleep: pwm20_sleep {
group1 {
psels = <NRF_PSEL(PWM_OUT0, 1, 4)>;
low-power-enable;
};
};
};
// PDM instance 20 for DMIC
dmic_dev: &pdm20 {
status = "okay";
};
// Power configuration
&pdm_imu_pwr {
/delete-property/ regulator-boot-on;
};
// UART instance 20
&uart20 {
current-speed = <921600>;
};
// SPI peripheral
&xiao_spi {
status = "okay";
// D1 pin for Chip Select
cs-gpios = <&xiao_d 1 GPIO_ACTIVE_LOW>;
};
// I2C peripheral
&xiao_i2c {
status = "okay";
zephyr,concat-buf-size = <2048>;
ssd1306_128x64: ssd1306@3c {
compatible = "solomon,ssd1306fb";
reg = <0x3c>;
width = <128>;
height = <64>;
segment-offset = <0>;
page-offset = <0>;
display-offset = <0>;
multiplex-ratio = <63>;
segment-remap;
com-invdir;
prechargep = <0x22>;
};
};
-
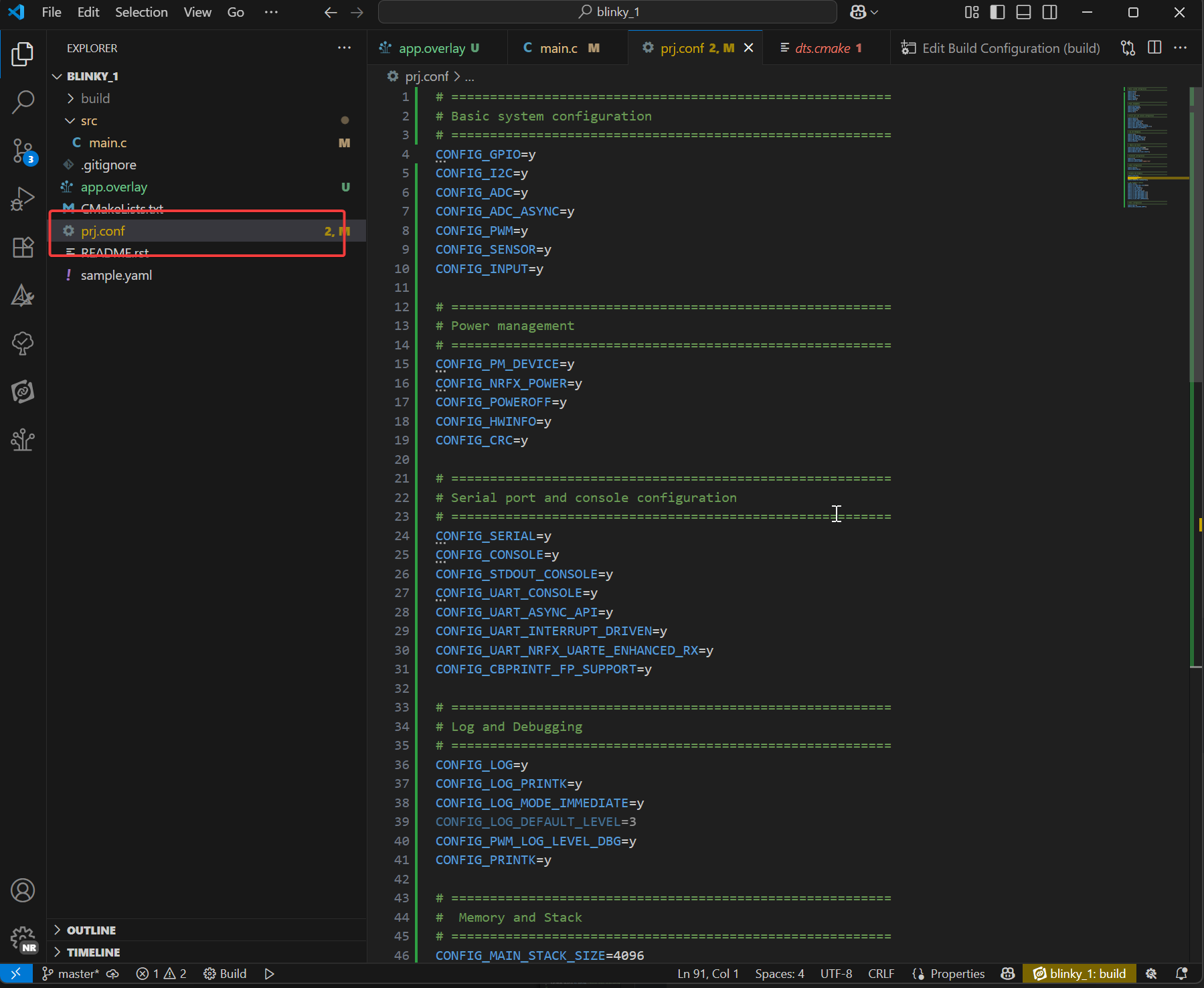
prj.conf ファイルの下に次の内容を追加します
- prj.conf は Zephyr プロジェクトの中核となる設定ファイルです。これはコンパイル時のソフトウェア機能の選択のために Kconfig システムによって管理されます。どのドライバ(ADC、ディスプレイ、Bluetooth など)、ミドルウェア(LVGL など)、およびシステムサービス(ロギング、メモリ管理など)をファームウェアに含めるかを決定し、それらの動作パラメータ(ログレベル、ヒープサイズなど)を設定します。最後に Ctrl + S を押して保存します。
prj.conf コード
# =========================================================
# Basic system configuration
# =========================================================
CONFIG_GPIO=y
CONFIG_I2C=y
CONFIG_ADC=y
CONFIG_ADC_ASYNC=y
CONFIG_PWM=y
CONFIG_SENSOR=y
CONFIG_INPUT=y
# =========================================================
# Power management
# =========================================================
CONFIG_PM_DEVICE=y
CONFIG_NRFX_POWER=y
CONFIG_POWEROFF=y
CONFIG_HWINFO=y
CONFIG_CRC=y
# =========================================================
# Serial port and console configuration
# =========================================================
CONFIG_SERIAL=y
CONFIG_CONSOLE=y
CONFIG_STDOUT_CONSOLE=y
CONFIG_UART_CONSOLE=y
CONFIG_UART_ASYNC_API=y
CONFIG_UART_INTERRUPT_DRIVEN=y
CONFIG_UART_NRFX_UARTE_ENHANCED_RX=y
CONFIG_CBPRINTF_FP_SUPPORT=y
# =========================================================
# Log and Debugging
# =========================================================
CONFIG_LOG=y
CONFIG_LOG_PRINTK=y
CONFIG_LOG_MODE_IMMEDIATE=y
CONFIG_LOG_DEFAULT_LEVEL=3
CONFIG_PWM_LOG_LEVEL_DBG=y
CONFIG_PRINTK=y
# =========================================================
# Memory and Stack
# =========================================================
CONFIG_MAIN_STACK_SIZE=4096
CONFIG_HEAP_MEM_POOL_SIZE=16384
CONFIG_NEWLIB_LIBC=y
CONFIG_NEWLIB_LIBC_FLOAT_PRINTF=y
# =========================================================
# Bluetooth configuration
# =========================================================
CONFIG_BT=y
CONFIG_BT_PERIPHERAL=y
CONFIG_BT_DEVICE_NAME="zephyr-ble"
# =========================================================
# Audio configuration
# =========================================================
CONFIG_AUDIO=y
CONFIG_AUDIO_DMIC=y
# =========================================================
# Display and Graphics
# =========================================================
CONFIG_DISPLAY=y
CONFIG_MIPI_DBI_SPI=y
CONFIG_SSD1306=y
CONFIG_CHARACTER_FRAMEBUFFER=y
# LVGL Graphics Library
CONFIG_LVGL=y
CONFIG_LV_Z_MEM_POOL_SIZE=49152
CONFIG_LV_Z_SHELL=y
CONFIG_LV_USE_MONKEY=y
CONFIG_LV_USE_LABEL=y
CONFIG_LV_COLOR_DEPTH_1=y
CONFIG_LV_FONT_MONTSERRAT_12=y
CONFIG_LV_FONT_MONTSERRAT_14=y
CONFIG_LV_FONT_MONTSERRAT_16=y
CONFIG_LV_FONT_MONTSERRAT_18=y
CONFIG_LV_FONT_MONTSERRAT_24=y
CONFIG_LV_USE_FONT_COMPRESSED=y
# =========================================================
# Shell configuration
# =========================================================
CONFIG_SHELL=y
CONFIG_SHELL_BACKEND_DUMMY=y
コアコード
#include <inttypes.h>
#include <stddef.h>
#include <stdint.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/regulator.h>
#include <zephyr/drivers/adc.h>
#include <zephyr/kernel.h>
#if !DT_NODE_EXISTS(DT_PATH(zephyr_user)) || \
!DT_NODE_HAS_PROP(DT_PATH(zephyr_user), io_channels)
#error "No suitable devicetree overlay specified"
#endif
#define DT_SPEC_AND_COMMA(node_id, prop, idx) \
ADC_DT_SPEC_GET_BY_IDX(node_id, idx),
/* Data of ADC io-channels specified in devicetree. */
static const struct adc_dt_spec adc_channels[] = {
DT_FOREACH_PROP_ELEM(DT_PATH(zephyr_user), io_channels,
DT_SPEC_AND_COMMA)};
static const struct device *const vbat_reg = DEVICE_DT_GET(DT_NODELABEL(vbat_pwr));
int main(void)
{
int err;
uint16_t buf;
int32_t val_mv;
struct adc_sequence sequence = {
.buffer = &buf,
/* buffer size in bytes, not number of samples */
.buffer_size = sizeof(buf),
};
regulator_enable(vbat_reg);
k_sleep(K_MSEC(100));
/* Configure channels individually prior to sampling. */
if (!adc_is_ready_dt(&adc_channels[7]))
{
printf("ADC controller device %s not ready\n", adc_channels[7].dev->name);
return 0;
}
err = adc_channel_setup_dt(&adc_channels[7]);
if (err < 0)
{
printf("Could not setup channel #7 (%d)\n", err);
return 0;
}
(void)adc_sequence_init_dt(&adc_channels[7], &sequence);
err = adc_read_dt(&adc_channels[7], &sequence);
if (err < 0)
{
printf("Could not read (%d)\n", err);
return 0;
}
/*
* If using differential mode, the 16 bit value
* in the ADC sample buffer should be a signed 2's
* complement value.
*/
if (adc_channels[7].channel_cfg.differential)
{
val_mv = (int32_t)((int16_t)buf);
}
else
{
val_mv = (int32_t)buf;
}
err = adc_raw_to_millivolts_dt(&adc_channels[7],
&val_mv);
/* conversion to mV may not be supported, skip if not */
if (err < 0)
{
printf(" value in mV not available\n");
}
else
{
printf("bat vol = %" PRId32 " mV\n", val_mv * 2);
}
regulator_disable(vbat_reg);
return 0;
}
リソース
Seeed Studio XIAO nRF54L15
ハードウェア設計
- 📄[データシート] Nordic nRF54L15 Datasheet
- 📄[回路図] XIAO nRF54L15 Schematic
- 🗃️[PCB 設計ファイル] XIAO nRF54L15 KiCad Project
- 🗃️[PCB 設計ライブラリ]
- 📄[ピン配置図] XIAO nRF54L15 ピン配置シート
メカニカル
- 🗃️[2D 寸法] XIAO nRF54L15 DXF 形式寸法図
Seeed Studio XIAO nRF54L15 Sense
ハードウェア設計
- 📄[データシート] Nordic nRF54L15 Datasheet
- 📄[回路図] XIAO nRF54L15 Sense Schematic
- 🗃️[PCB 設計ファイル]
- 🗃️[PCB 設計ライブラリ]
- 🗃️[ピン配置図] XIAO nRF54L15 Sense ピン配置シート
メカニカル
- 📄[2D 寸法] XIAO nRF54L15 Sense DXF 形式寸法図
- 🗃️[3D 寸法] XIAO nRF54L15 Sense 3D 寸法
参考資料
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます。私たちは、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じてお選びいただける、複数のコミュニケーションチャネルをご用意しています。