XIAO nRF54L15 with PlatformIO

PlatformIO の紹介
PlatformIO は、組み込みシステム向けに設計された強力で高度に拡張可能な開発エコシステムです。膨大な数の開発ボードとマイクロコントローラーのサポートをシームレスに統合し、比類のない柔軟性を提供します。PlatformIO の特徴は、その優れたスケーラビリティです:特定のボードがネイティブでサポートされていない場合でも、そのアーキテクチャにより簡単にカスタムボード定義を作成できます。
重要なことに、PlatformIO は Arduino に慣れ親しんだ開発者のギャップを埋め、関連するライブラリを含めるだけで Arduino スタイルのコードのコンパイルとデプロイを可能にします。このガイドでは、XIAO nRF54L15 用の PlatformIO のセットアップ手順を説明し、サンプルコードのコンパイル、アップロード、監視方法を実演して、複雑な Zephyr RTOS 開発を驚くほどアクセスしやすくします。
XIAO nRF54L15 用の PlatformIO セットアップ
以下の効率的な手順に従って、開発環境を設定し、XIAO nRF54L15 Sense で最初のアプリケーションをデプロイしてください。
VS Code 用 PlatformIO IDE 拡張機能のインストール
まだインストールしていない場合は、Visual Studio Code 内で直接 PlatformIO IDE 拡張機能をインストールしてください。この強力な拡張機能により、VS Code が包括的な組み込み開発環境に変わります。
-
VS Code を開きます。
-
拡張機能ビューに移動します(Ctrl+Shift+X または Cmd+Shift+X)。
-
"PlatformIO IDE" を検索し、Install をクリックします。
新しい PlatformIO プロジェクトの作成
ここでは、プロジェクトファイルを作成するために任意の開発バージョンを選択できます。例として XIAO ESP32 C3 を使用します。
| 操作1 | 操作2 |
|---|---|
 |  |
XIAO nRF54L15 Zephyr サポート用の platformio.ini 設定
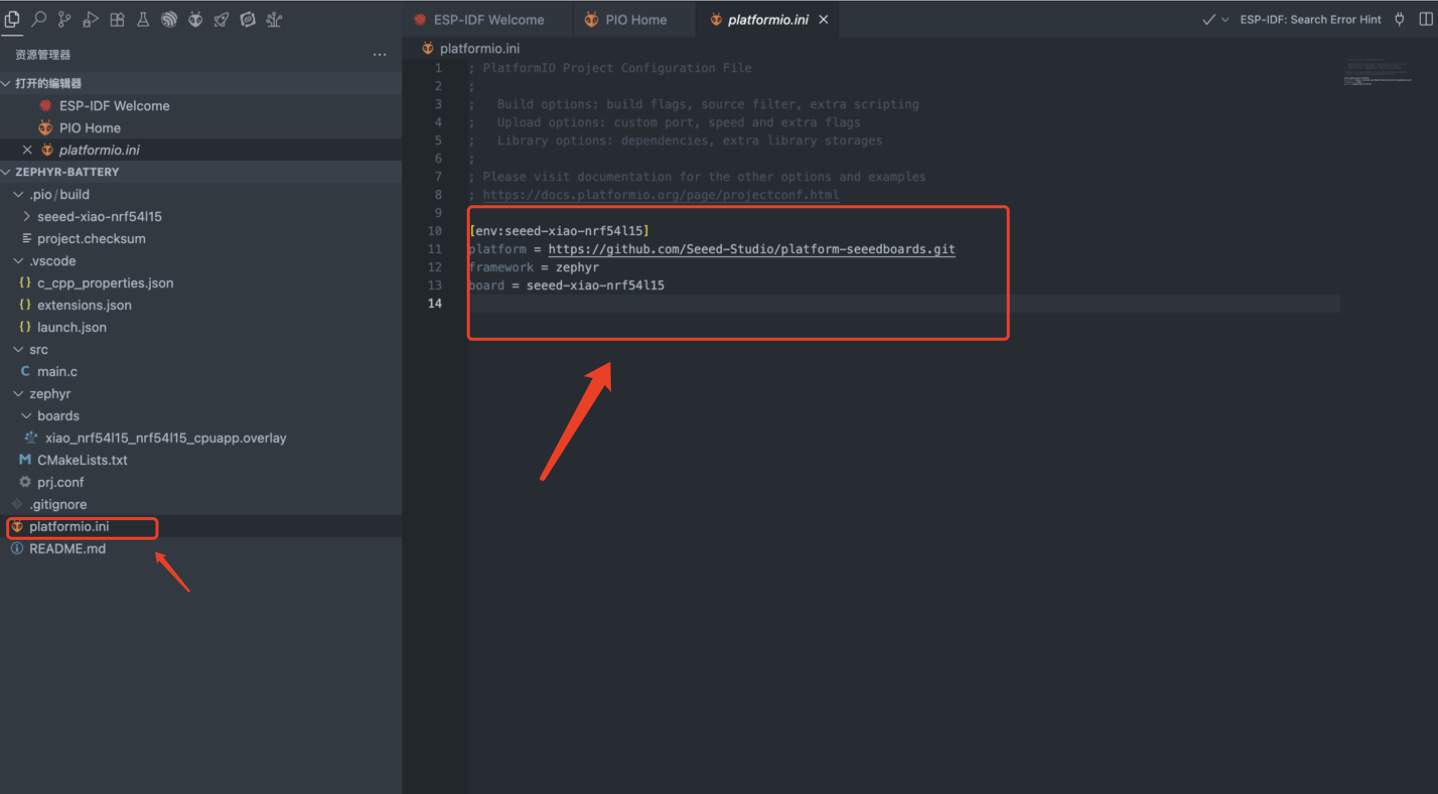
プロジェクトが作成されたら、プロジェクトディレクトリのルートにある platformio.ini ファイルを見つけてください(VS Code の左側のエクスプローラーで確認できます)。このファイルは PlatformIO プロジェクト設定の中核です。
| 操作3 |
|---|
platformio.ini ファイルの内容全体を以下の設定に置き換える必要があります:
[env:seeed-xiao-nrf54l15]
platform = https://github.com/Seeed-Studio/platform-seeedboards.git
framework = zephyr
board = seeed-xiao-nrf54l15
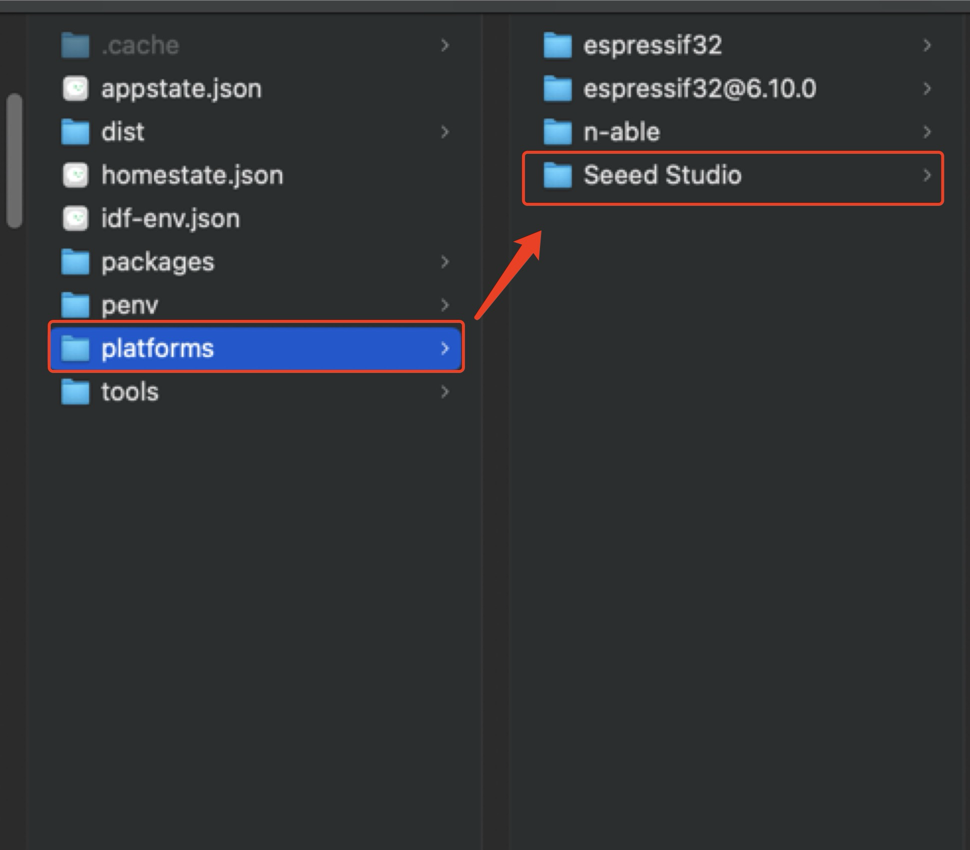
以前に他の XIAO ライブラリをダウンロードしている場合は、platform.ini ファイルを変更して必要なライブラリを再ダウンロードする前に、手動でそれらを削除する必要があります。
Mac パス:
/Users/YourName/.platformio/platforms
Windows パス:
C:\Users\000.platformio\platforms\Seeed Studio
| 操作4 |
|---|
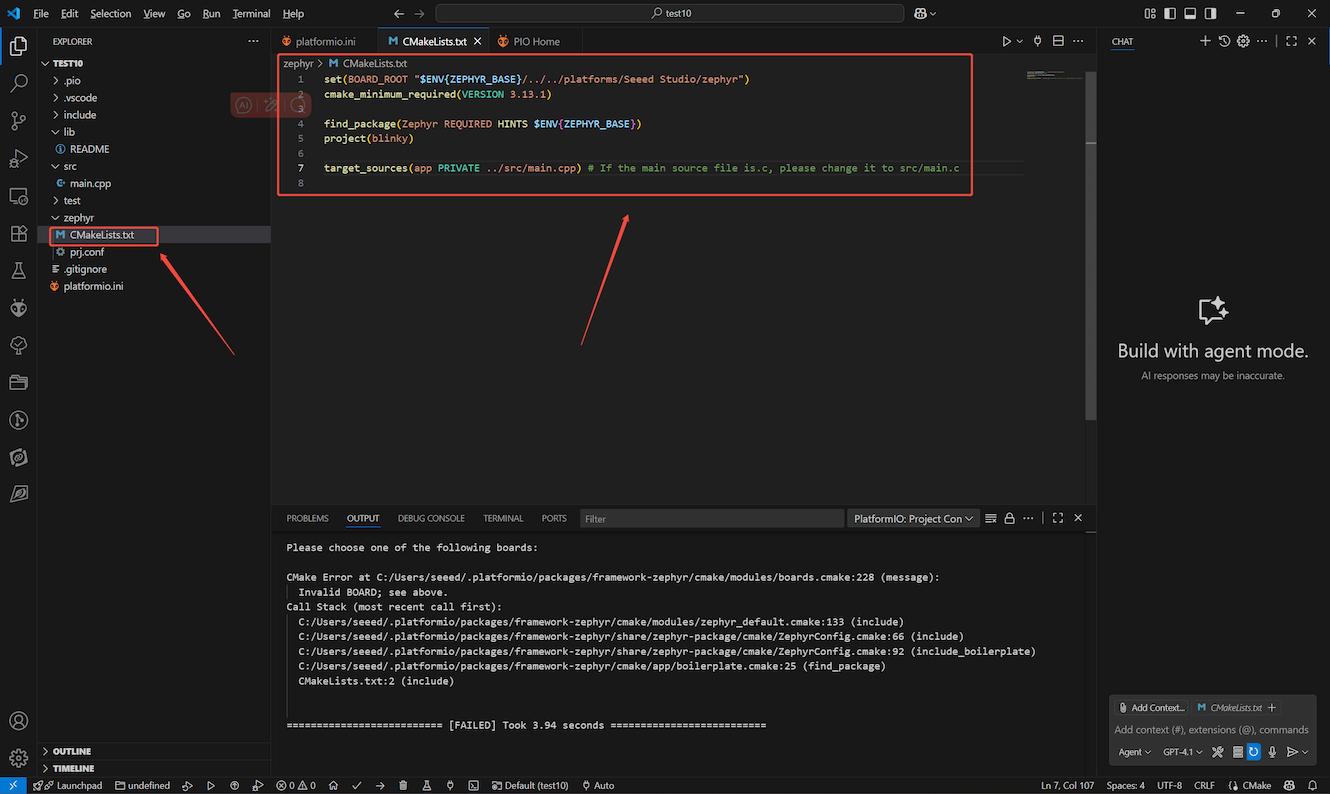
cMakeLists.txt の内容を以下の設定に置き換える必要があります
set(BOARD_ROOT "$ENV{ZEPHYR_BASE}/../../platforms/Seeed Studio/zephyr")
cmake_minimum_required(VERSION 3.13.1)
find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE})
project(blinky)
target_sources(app PRIVATE ../src/main.cpp) # If the main source file is.c, please change it to src/main.c
その後、platformio.ini ファイルを再保存し(Ctrl+S または Cmd+S)、完全に読み込まれるまで待ちます。
最初の Blink サンプルのコンパイルとアップロード
それでは、クラシックな「Blink」サンプルでセットアップをテストしてみましょう。このコードは XIAO nRF54L15 の内蔵 LED を点滅させます。
src/main.cpp(または src/main.c)ファイルの内容を以下の Zephyr 互換 C コードに置き換えてください:
次に、このコードを使用してコンパイルと書き込みを行います
/*
* Copyright (c) 2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/gpio.h>
#include <nrfx_power.h>
/* 1000 msec = 1 sec */
#define SLEEP_TIME_MS 1000
/* The devicetree node identifier for the "led0" alias. */
#define LED0_NODE DT_ALIAS(led0)
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);
int main(void)
{
int ret;
bool led_is_on = true;
nrfx_power_constlat_mode_request();
if (!gpio_is_ready_dt(&led)) {
return -1;
}
ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
if (ret < 0) {
return ret;
}
while (1) {
ret = gpio_pin_set_dt(&led, (int)led_is_on);
if (ret < 0) {
return ret;
}
led_is_on = !led_is_on;
k_msleep(SLEEP_TIME_MS);
}
return 0;
}
次に、XIAO nRF54L15 を USB でコンピューターに接続します。VS Code で:
-
ビルド:VS Code 下部の PlatformIO ツールバーの「Build」アイコン(チェックマーク)をクリックするか、PlatformIO サイドバーを使用します:PROJECT TASKS -> your_project_name -> General -> Build。
-
アップロード:ビルドが成功した後、PlatformIO ツールバーの「Upload」アイコン(右矢印)をクリックするか、PlatformIO サイドバーを使用します:PROJECT TASKS -> your_project_name -> General -> Upload。
| 操作5 |
|---|
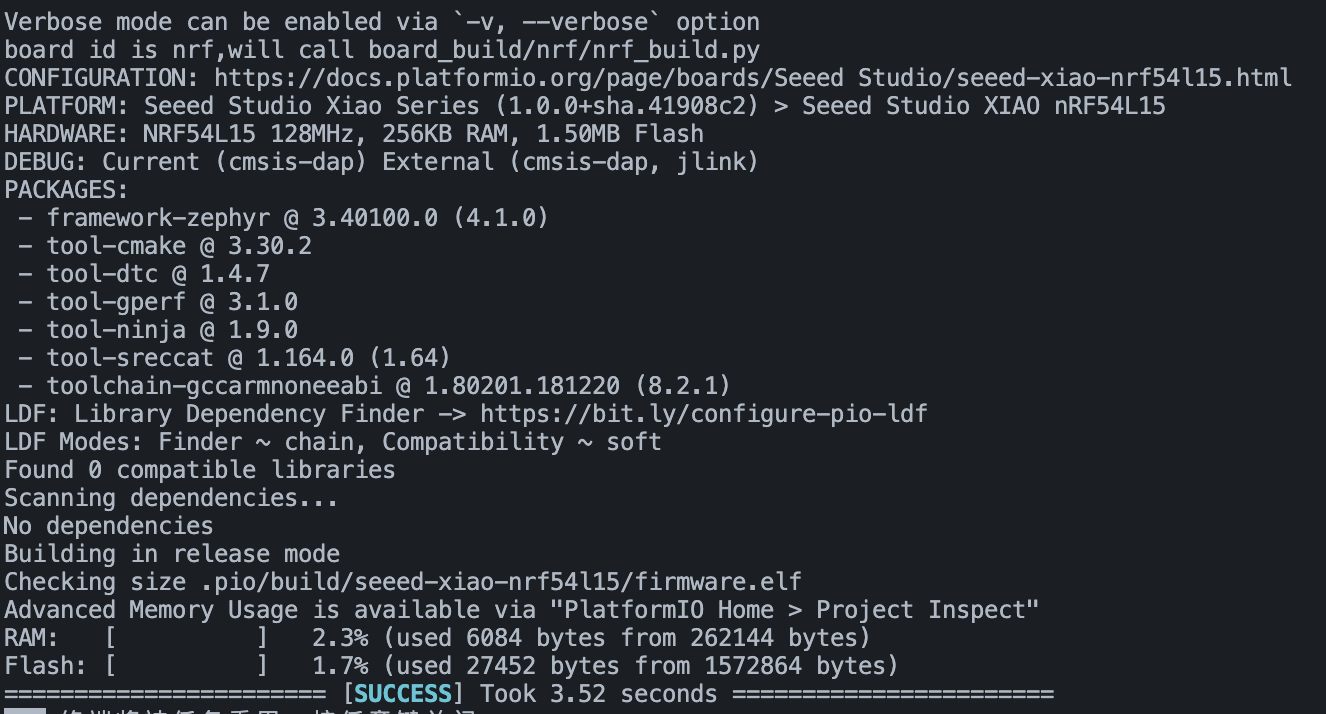
ターミナルの出力は、コンパイルと書き込みプロセスが成功したことを示すはずです。
結果の確認
アップロードが成功した後、XIAO nRF54L15 の内蔵 LED が 1 秒間隔で点滅を開始するはずです。
技術サポートと製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャネルを提供しています。