Seeed Studio XIAO nRF54LM20A Sense を MicroPython で使う
MicroPython は、性能が重要なコード向けにネイティブコード出力をサポートする Python インタプリタです。マイコンやリソースに制約のあるシステム向けに最適化された、Python 3.6+ のコア機能のサブセットを提供します。これは CPython とは異なり、その違いについては MicroPython vs CPython differences のページで詳しく読むことができます。
XIAO nRF54LM20A Sense で MicroPython を使う
次に、XIAO nRF54LM20A Sense 上で MicroPython を使用し、Windows オペレーティングシステムを前提として Thonny IDE でプログラムする方法を順を追って説明します。
ハードウェアの準備
始める前に、XIAO nRF54LM20A Sense 開発ボードを 1 枚用意する必要があります。
| Seeed Studio XIAO nRF54LM20A Sense |
|---|
Thonny IDE のインストール
使用している環境に合ったバージョンを選んでインストールします。ここでは Windows システムにインストールするため、Windows 版を選択しています。
使用したい Python バージョンに応じて、指示に従ってください。
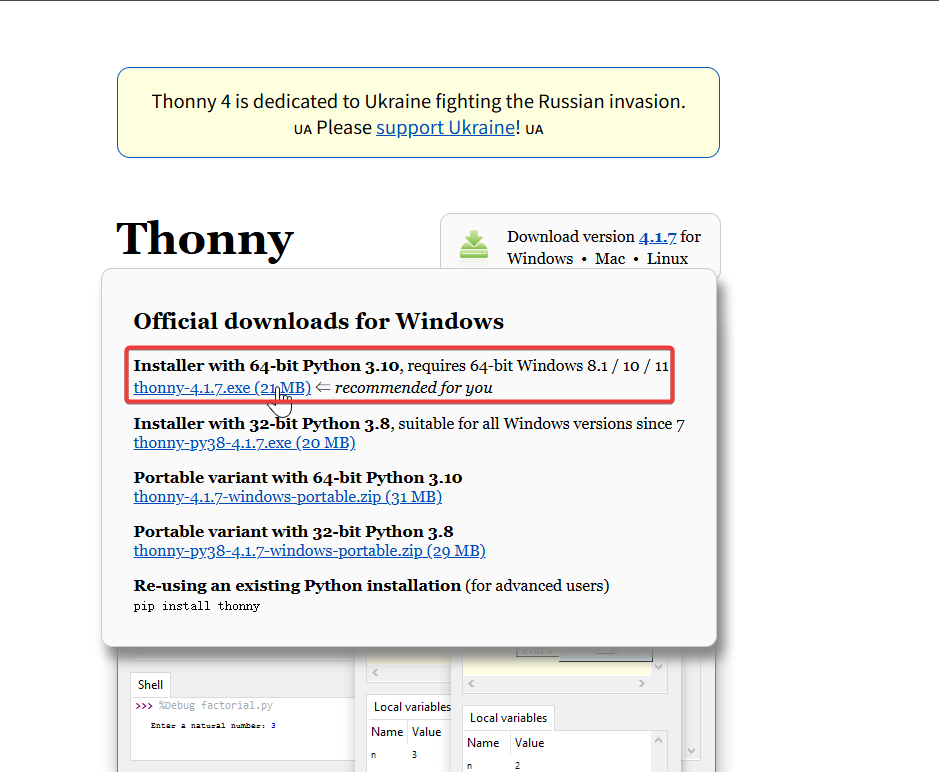
その後は、デフォルトの手順に従って設定を進めるだけです。
MicroPython ファームウェアの書き込み
次に、XIAO nRF54LM20A Sense に MicroPython ファームウェアを書き込む手順を説明します。
ファームウェアを書き込む前に、XIAO nRF54LM20A Sense をコンピュータに接続してください。
- ファームウェア圧縮パッケージをダウンロードする
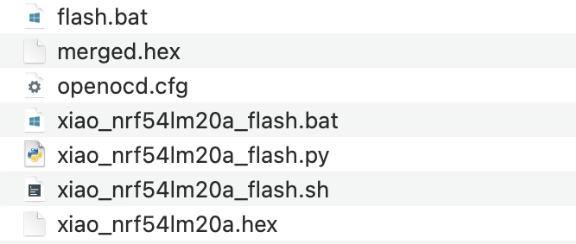
- フォルダを解凍する
フォルダを任意のディレクトリに解凍すると、次のファイル群が表示されます。
- スクリプトを使用して MicroPython ファームウェアを書き込む
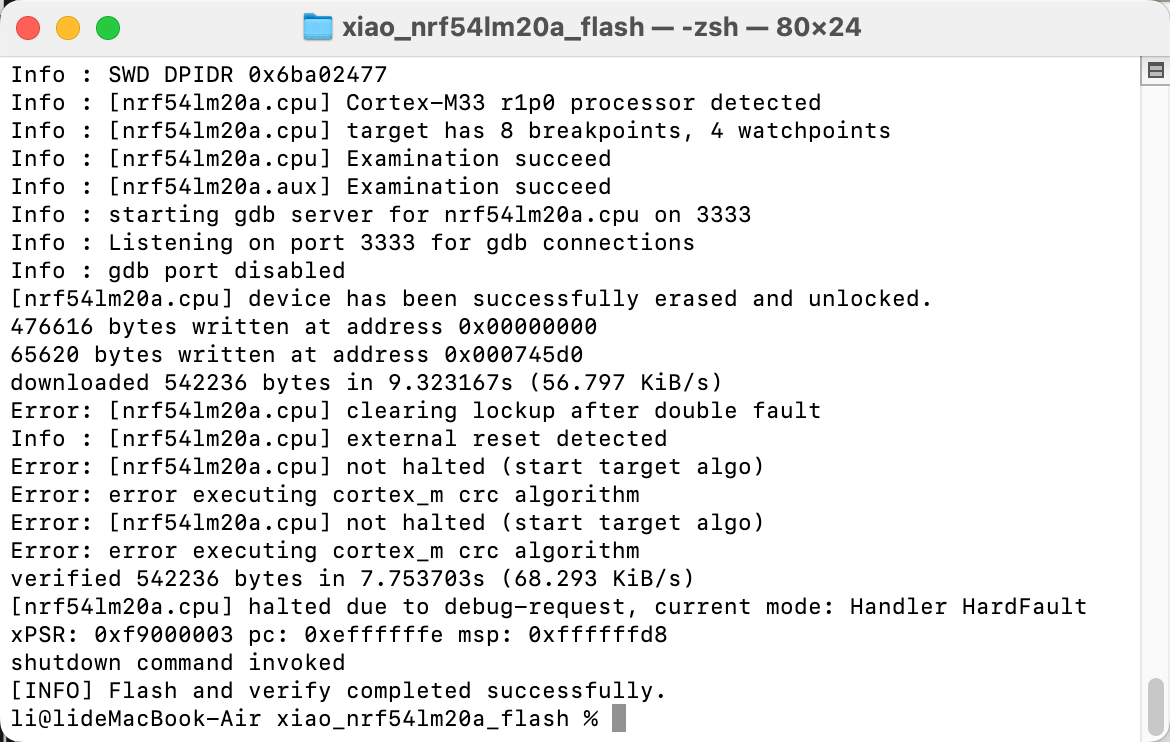
- Windows の場合、解凍したフォルダ内で右クリックして PowerShell ターミナルを開き、書き込みスクリプトを実行します。スクリプトが正しく実行されると、出力結果は次の図のようになります。
.\flash.bat
- Mac/Linux の場合
cd ~/xiao_nrf54lm20a_flash
sed -i '' $'s/\r$//' xiao_nrf54lm20a_flash.sh
chmod +x xiao_nrf54lm20a_flash.sh
./xiao_nrf54lm20a_flash.sh
書き込み結果のテスト
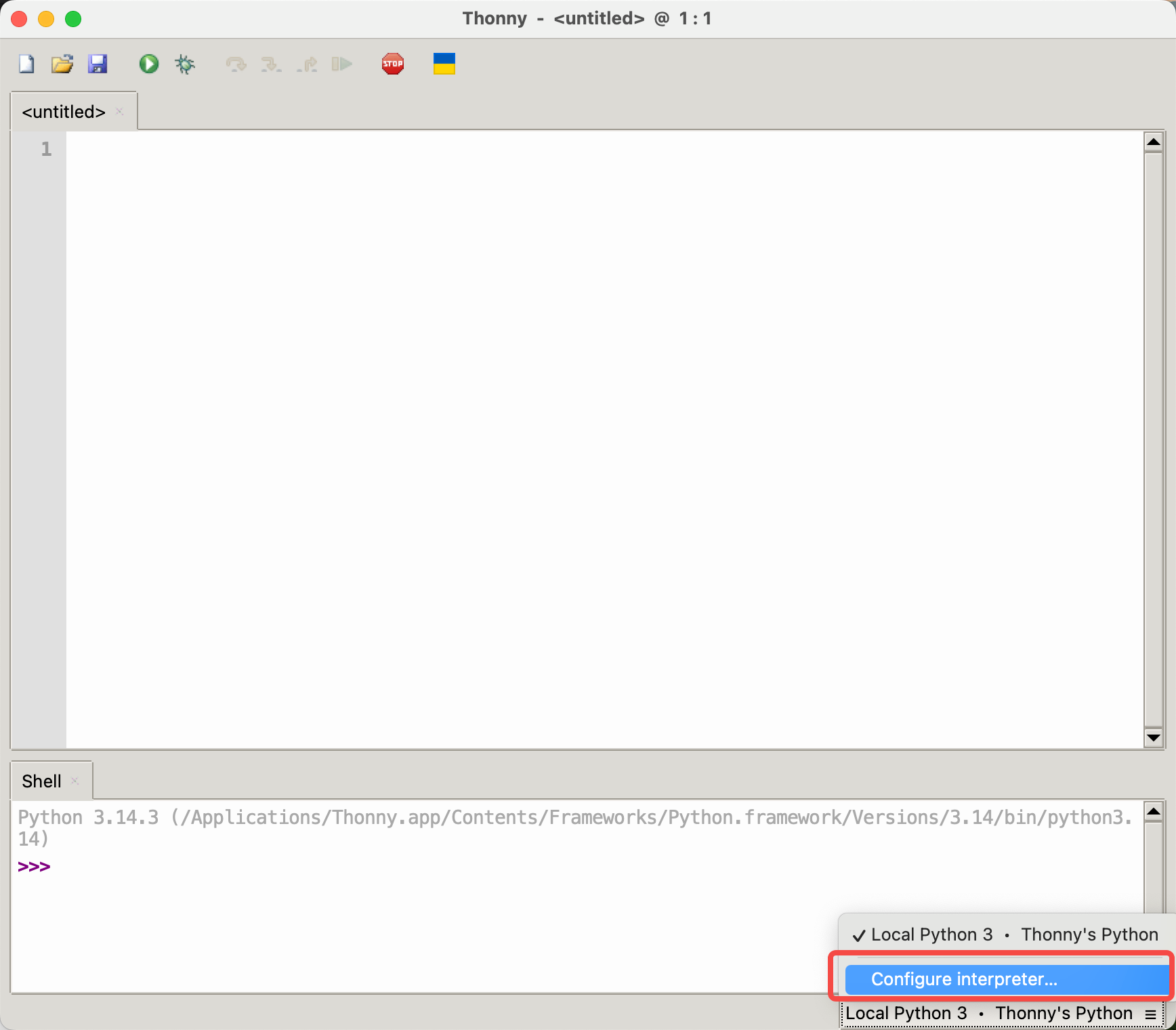
この章では主に、Thonny IDE の設定方法について説明します。
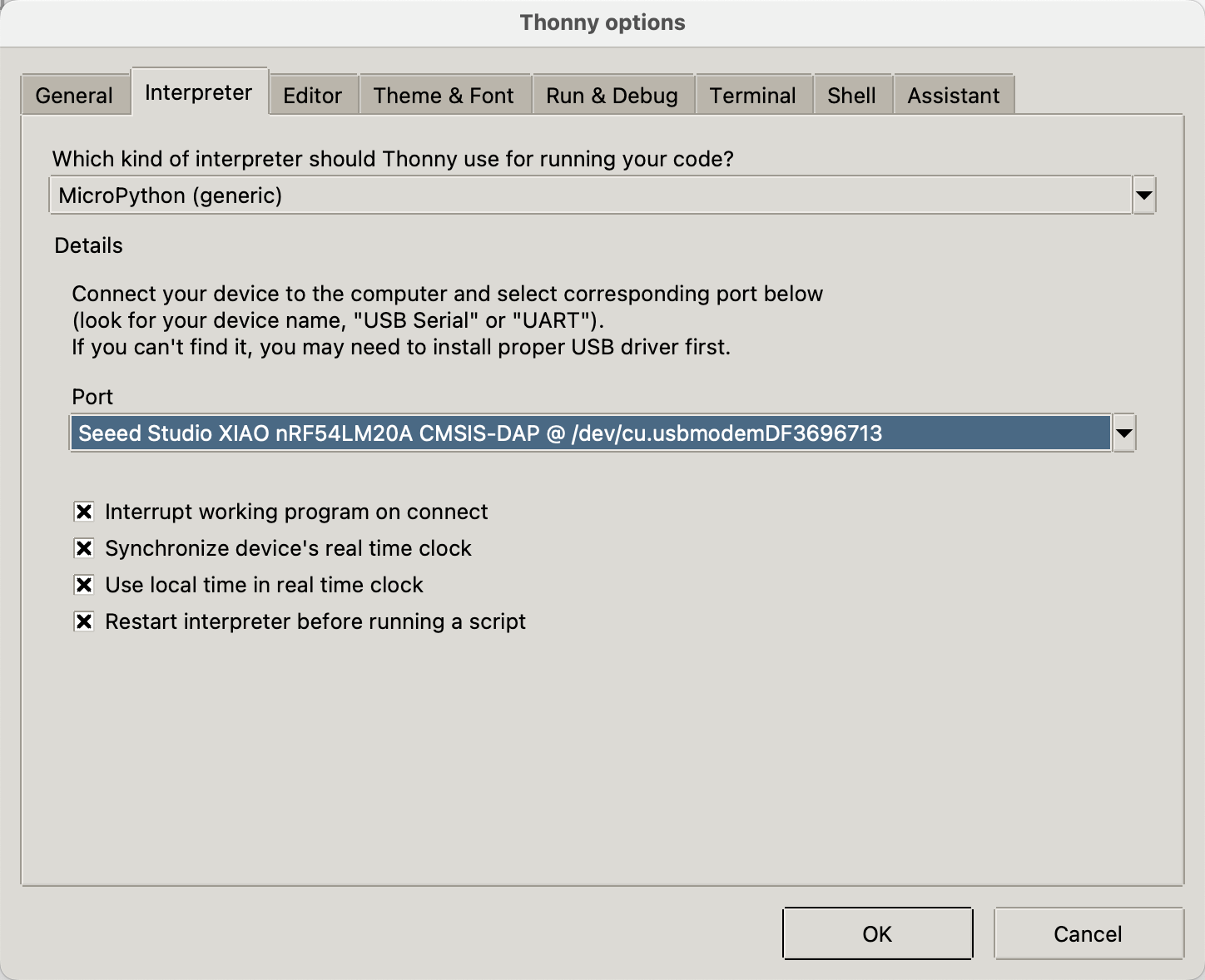
- Thonny IDE を開き、右下をクリックしてインタプリタ設定の選択を行います。
- MicroPython (generic) を選択し、デバイスに応じて対応する Port を選び、OK をクリックします。
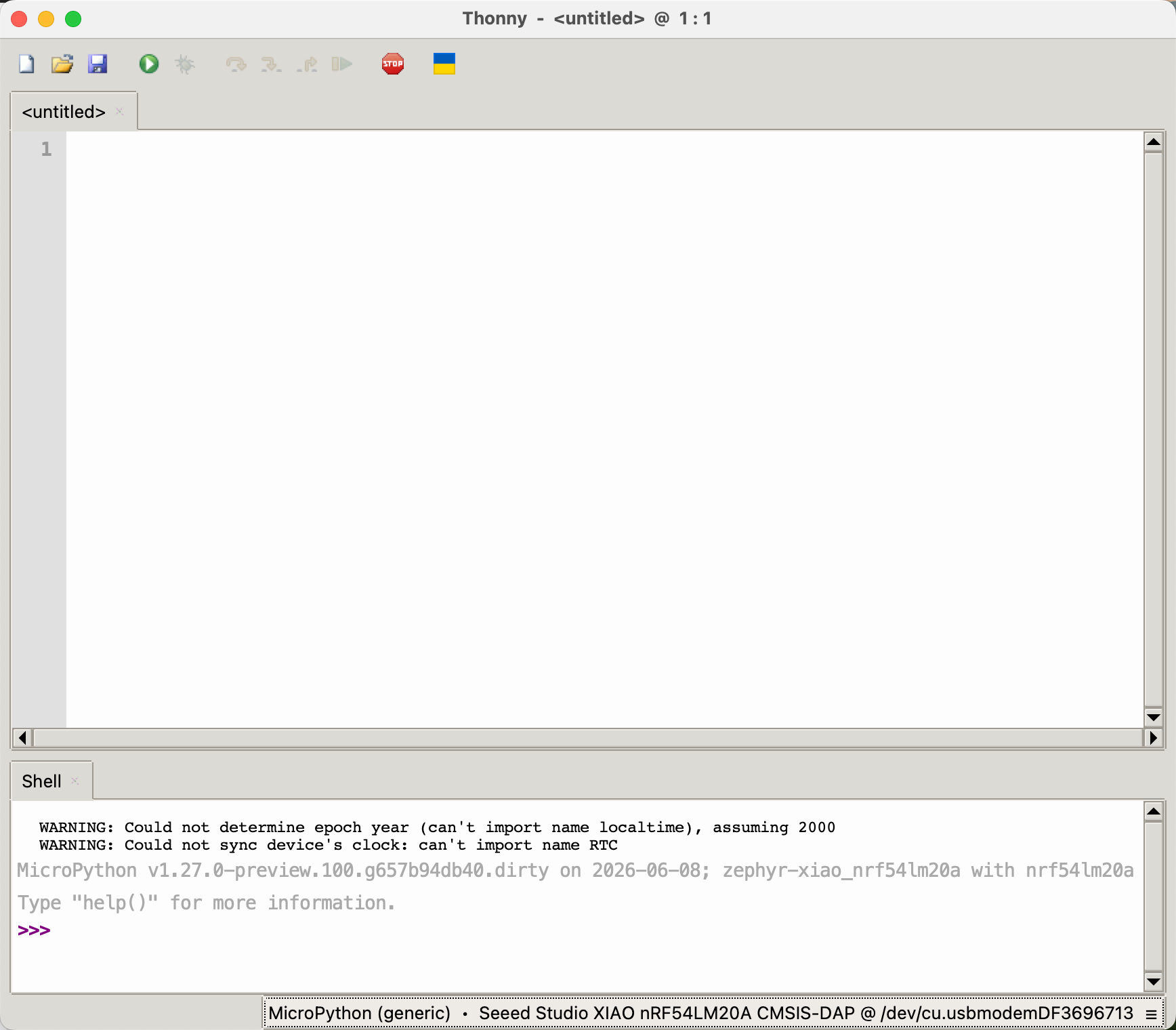
- 接続に成功すると、次の図のように表示されます。
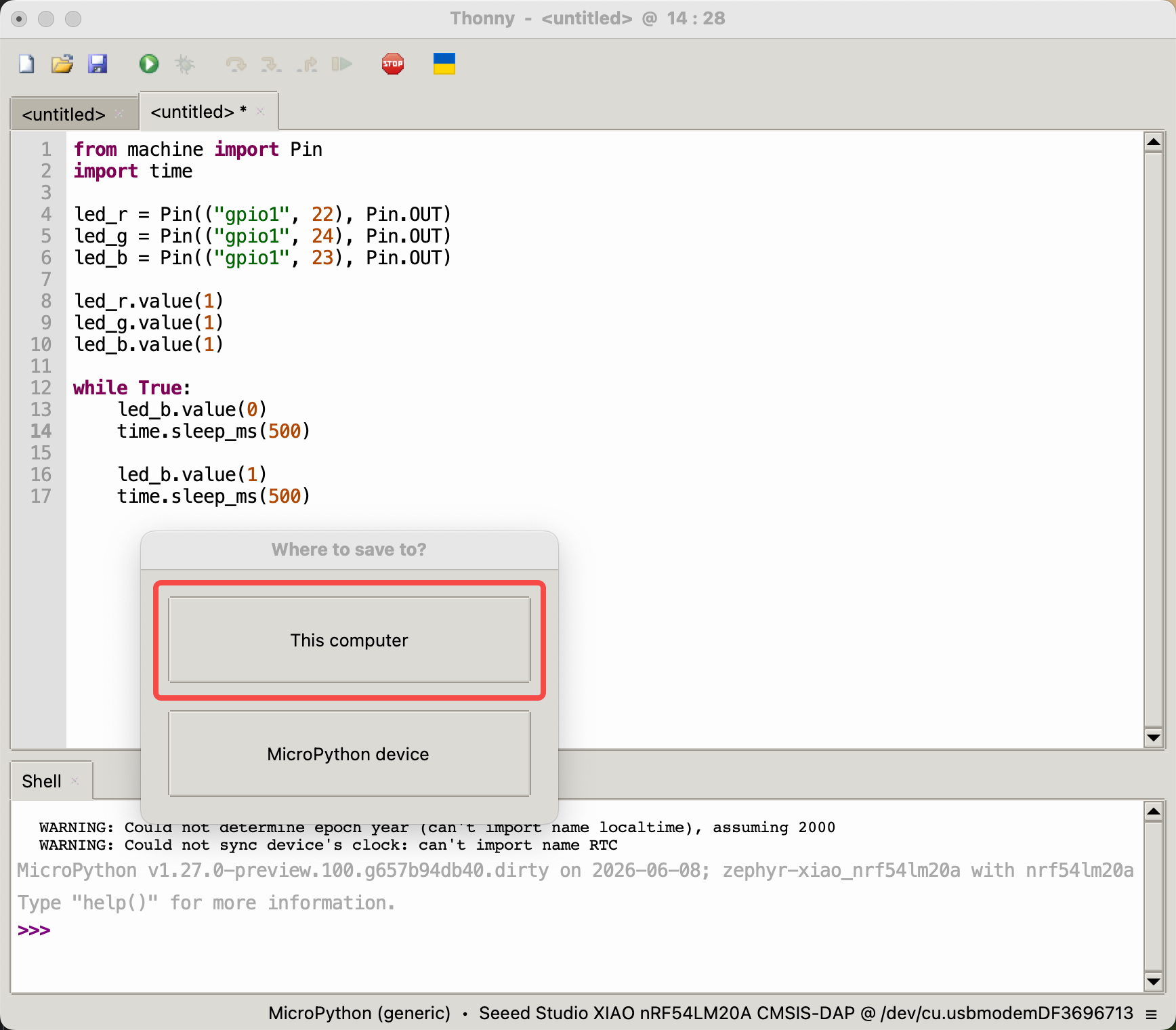
- File -> New で新しいファイルを作成し、保存テストを行います。
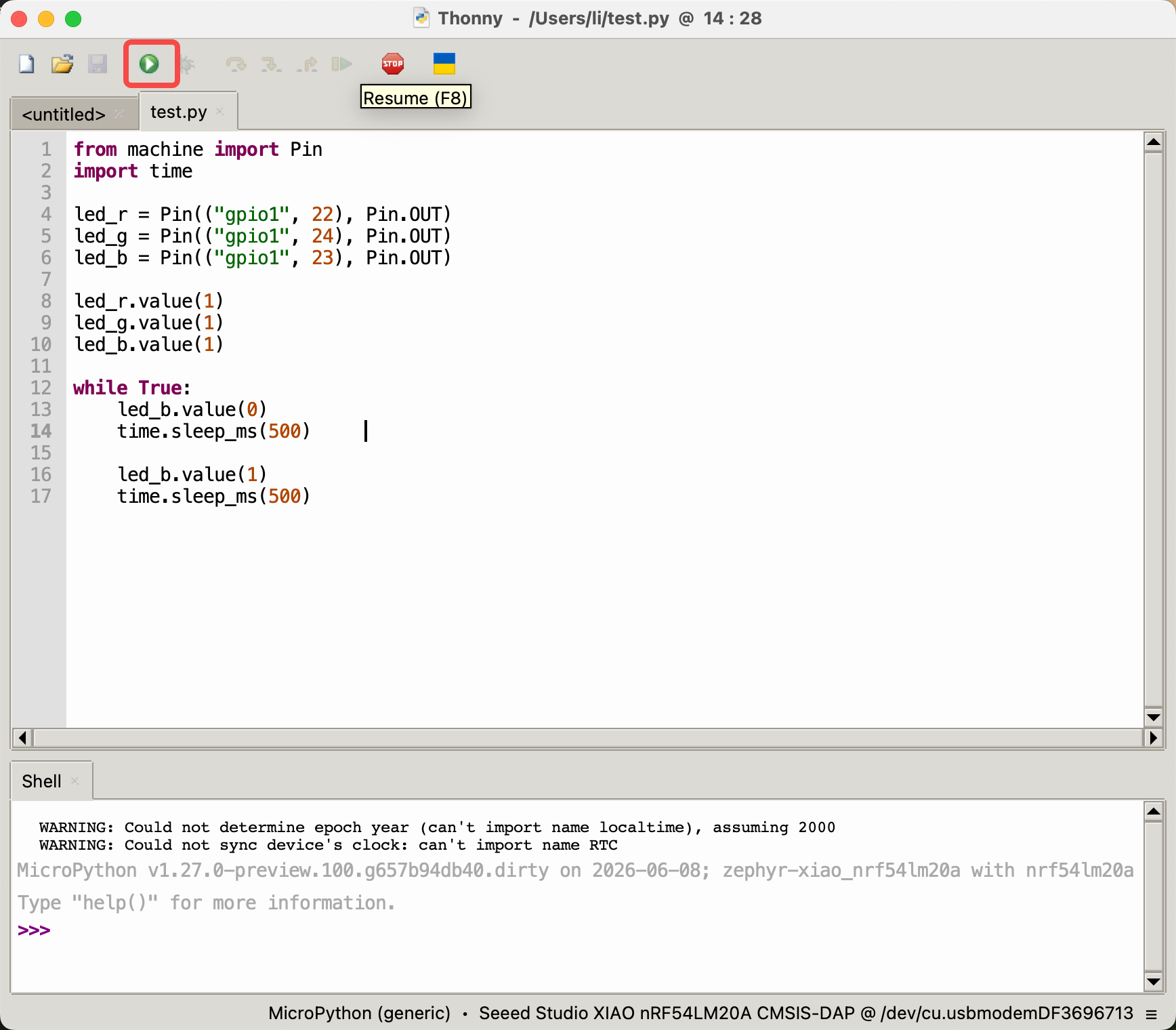
- ファームウェアの書き込み後、Python プログラムを作成し、RGB-B LED が 0.5 秒ごとの周期で点滅するようにします。
from machine import Pin
import time
led_r = Pin(("gpio1", 22), Pin.OUT)
led_g = Pin(("gpio1", 24), Pin.OUT)
led_b = Pin(("gpio1", 23), Pin.OUT)
led_r.value(1)
led_g.value(1)
led_b.value(1)
while True:
led_b.value(0)
time.sleep_ms(500)
led_b.value(1)
time.sleep_ms(500)
- 左上のボタンをクリックしてプログラムを実行します。
- プログラムの動作結果は次の図のとおりです。
デジタル
デジタルピンは主に、高低の論理レベルを出力することで外部センサやアクチュエータのオン・オフ制御に使用されます。Grove Base for XIAO 拡張ボードと標準 Grove 周辺モジュールを組み合わせて、このセクションでは XIAO nRF54LM20A Sense で MicroPython を用いてデジタルピンを使用する方法を紹介します。
ハードウェアの準備
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Grove Base for XIAO | Grove - Piezo Buzzer | Grove - Button |
|---|---|---|---|
 |  |  | |
ソフトウェアの準備
XIAO nRF54LM20A Sense のピン配置に従い、D0 (P1.0) を Grove-Button の制御ピンとして、D1 (P1.31) を Grove-Piezo Buzzer の制御ピンとして選択できます。
- XIAO nRF54LM20A Sense のピン配置については、XIAO nRF54LM20A Pin List をクリックして詳細を確認してください。
"""
Grove Button (D0 / P1.0) + Grove Piezo Buzzer (D1 / P1.31) - Digital mode
Button pressed → Buzzer ON; Button released → Buzzer OFF
"""
import time
from boards.xiao import XiaoPin
BUTTON = 0 # D0 → P1.0 (Grove Button, onboard pull-down)
BUZZER = 1 # D1 → P1.31 (Grove Piezo Buzzer)
try:
button = XiaoPin(BUTTON, XiaoPin.IN)
buzzer = XiaoPin(BUZZER, XiaoPin.OUT)
buzzer.value(0)
print("Digital demo started. Press the button to activate the buzzer.")
while True:
val = button.value()
buzzer.value(val)
time.sleep(0.01)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
buzzer.value(0)
コード解説:
- インポートとピン定義:
boards.xiaoのXiaoPinは GPIO 制御を提供します。BUTTON = 0は D0(P1.0)に対応し、BUZZER = 1は D1(P1.31)に対応します。 - 初期化: ボタンピンは入力として設定されます(Grove Button にはオンボードのプルダウン抵抗があり、押されたときに HIGH になります)。ブザーピンは出力として設定され、初期状態は LOW(オフ)です。
- メインループ: ボタンの状態を継続的に読み取り、その値をそのままブザーに書き込みます。ボタンが押されているとき(HIGH)はブザーがオンになり、離したとき(LOW)はオフになります。10 ms のスリープでビジーループを防ぎます。
- クリーンアップ:
finallyブロックで、プログラム終了時にブザーがオフになることを保証します。
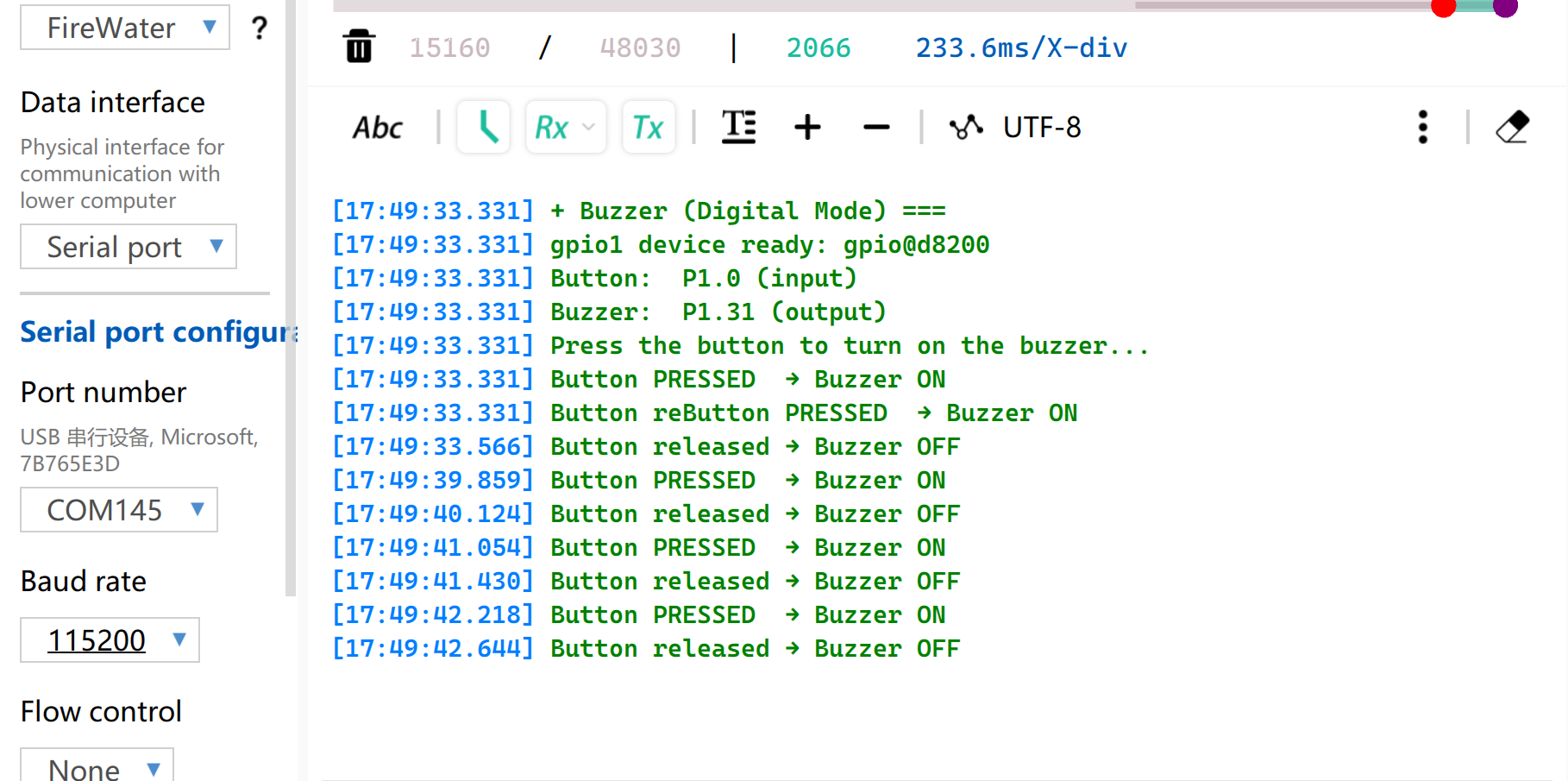
実行結果
プログラムを実行したあと、ボタンを押すとブザーが鳴ります。
PWM
PWM は、一定の周波数でピンレベルを高速に切り替え、デューティ比を動的に調整することで、周辺機器に等価なアナログ信号を出力します。サーボモーターの精密な角度制御や、LED の滑らかな明るさ調整などに広く利用されています。
ハードウェアの準備
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Grove Base for XIAO | Grove - Servo |
|---|---|---|
|  | |
ソフトウェアの準備
XIAO nRF54LM20A Sense のピン配置に従い、D0 (P1.0) を Grove-Servo の制御ピンとして選択できます。
- XIAO nRF54LM20A Sense のピン配置については、XIAO nRF54LM20A Pin List をクリックして詳細を確認してください。
"""
Servo control on D0 (P1.0) via PWM (50 Hz).
Sweeps 0 → 180° and back.
"""
import time
from boards.xiao import XiaoPWM
SERVO_PIN = 0 # D0 → P1.0
FREQ = 50 # Standard servo: 50 Hz
PERIOD_NS = 20_000_000 # 20 ms period in nanoseconds
# Standard servo: 0.5 ms → 0°, 2.5 ms → 180°
MIN_NS = 500_000
MAX_NS = 2_500_000
STEP_MS = 30 # 30 ms per degree step
try:
servo = XiaoPWM(SERVO_PIN)
servo.init(freq=FREQ, duty_ns=MIN_NS)
print("PWM servo demo started on D0 (P1.0).")
while True:
# 0° → 180°
for angle in range(0, 181):
pulse = MIN_NS + int((angle / 180.0) * (MAX_NS - MIN_NS))
servo.duty_ns(pulse)
print("Angle: %d deg" % angle)
time.sleep_ms(STEP_MS)
# 180° → 0°
for angle in range(180, -1, -1):
pulse = MIN_NS + int((angle / 180.0) * (MAX_NS - MIN_NS))
servo.duty_ns(pulse)
print("Angle: %d deg" % angle)
time.sleep_ms(STEP_MS)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
servo.deinit()
コード解説:
- インポートと定数:
XiaoPWMは PWM 出力を提供します。一般的なホビー用サーボは 50 Hz で動作し、0.5〜2.5 ms のパルス幅が 0〜180° の回転に対応します。 - 初期化: PWM チャンネルは D0 上で 50 Hz の周波数に設定して初期化します。初期デューティ比は最小パルス幅(0° 位置)に設定されます。
- メインループ: 2 つのネストされたループで、サーボを 0° から 180° までスイープし、その後元に戻します。角度は線形補間によってナノ秒単位のパルス幅に変換されます。現在の角度はコンソールに出力されます。
- クリーンアップ:
servo.deinit()はfinallyブロック内で PWM リソースを解放します。
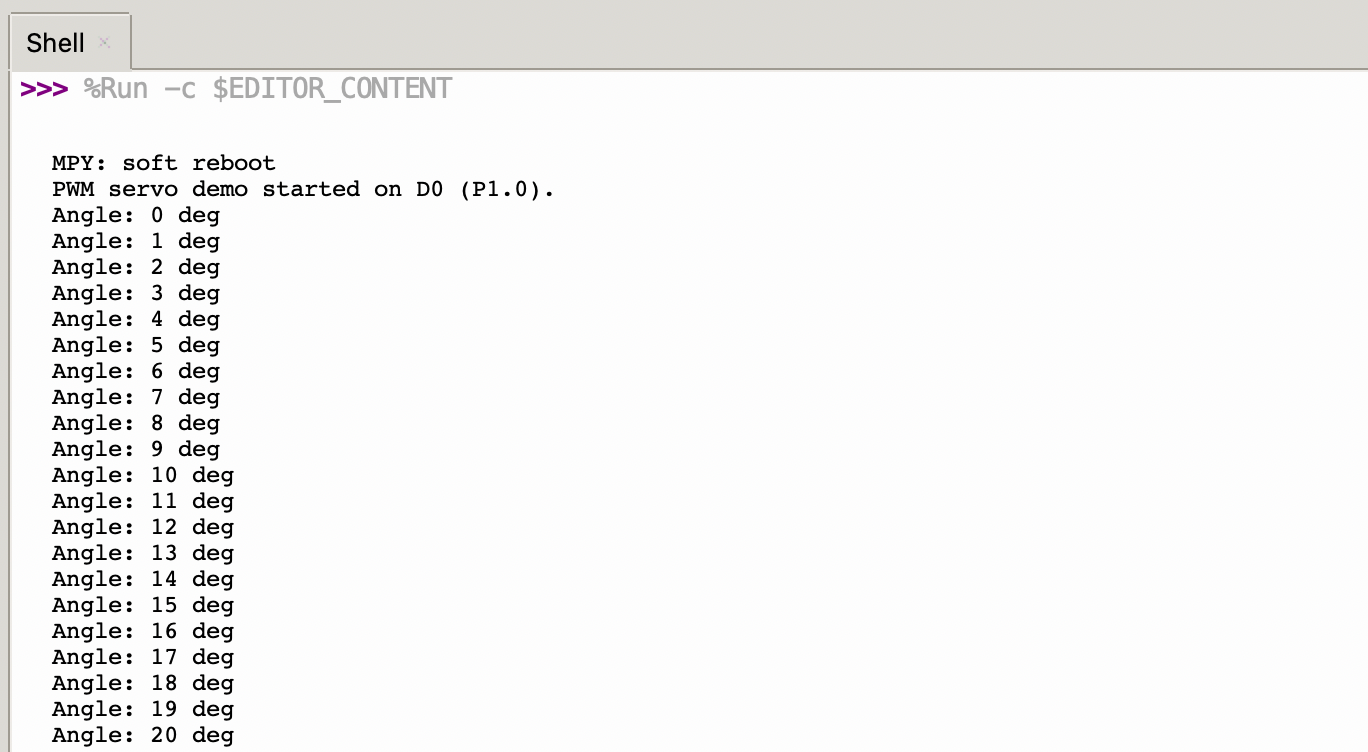
実行結果
ファームウェアを書き込むと、サーボは 0° から 180° まで毎秒 33 ラジアンの速度で回転し、その後 0° まで戻ります。
同時に、現在のサーボ角度が USB シリアルポート経由で出力されます。
アナログ
アナログ入力は ADC(Analog-to-Digital Converter)に基づいており、主に外部センサからの連続的なアナログ電圧信号を取得するために使用されます。生のデジタルサンプリング値は、線形または非線形の変換アルゴリズムを用いて、実際の工学的な測定値にマッピングできます。
ハードウェアの準備
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Grove Base for XIAO | Grove - Capacitive Soil Moisture Sensor |
|---|---|---|
|  | |
ソフトウェアの準備
XIAO nRF54LM20A Sense のピン配置に従い、D0 (P1.0, AIN0) が ADC 入力ピンとして使用されます。ADC 値は 500 ms ごとに USB シリアルポート経由で読み取られ、出力されます。
- XIAO nRF54LM20A Sense のピン配置については、XIAO nRF54LM20A Pin List をクリックして詳細を確認してください。
"""
Read ADC on D0 (P1.0 / AIN0) and print raw value every 500 ms.
"""
import time
from boards.xiao import XiaoADC
ADC_PIN = 0 # D0 → P1.0 (AIN0)
try:
adc = XiaoADC(ADC_PIN)
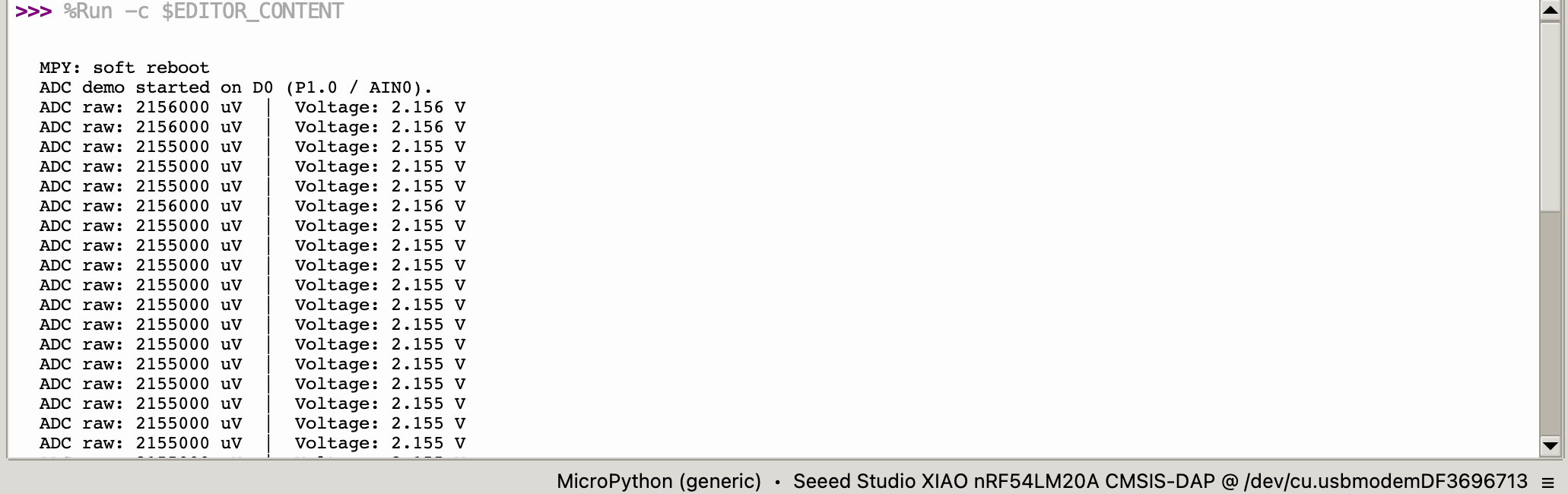
print("ADC demo started on D0 (P1.0 / AIN0).")
while True:
raw = adc.read_uv()
voltage = raw / 1_000_000.0
print("ADC raw: %d uV | Voltage: %.3f V" % (raw, voltage))
time.sleep(0.5)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
コード解説:
- インポート:
boards.xiaoのXiaoADCは ADC 機能を提供します。ADC_PIN = 0は D0(P1.0 / AIN0)に対応します。 - 初期化:
XiaoADC(ADC_PIN)によって、ピンがアナログ-デジタル変換用に設定されます。 - メインループ:
adc.read_uv()は ADC の読み取り値をマイクロボルト(µV)単位で返します。この値を表示用にボルトに変換します。生の µV 値と電圧値の両方が 500 ms ごとに出力されます。 - エラー処理:
try/except/finallyによって、正常に終了できるようにします。
実行結果
プログラムを書き込んだあと、Grove-Capacitive Soil Moisture Sensor を家庭用の鉢植えに挿し込みます。
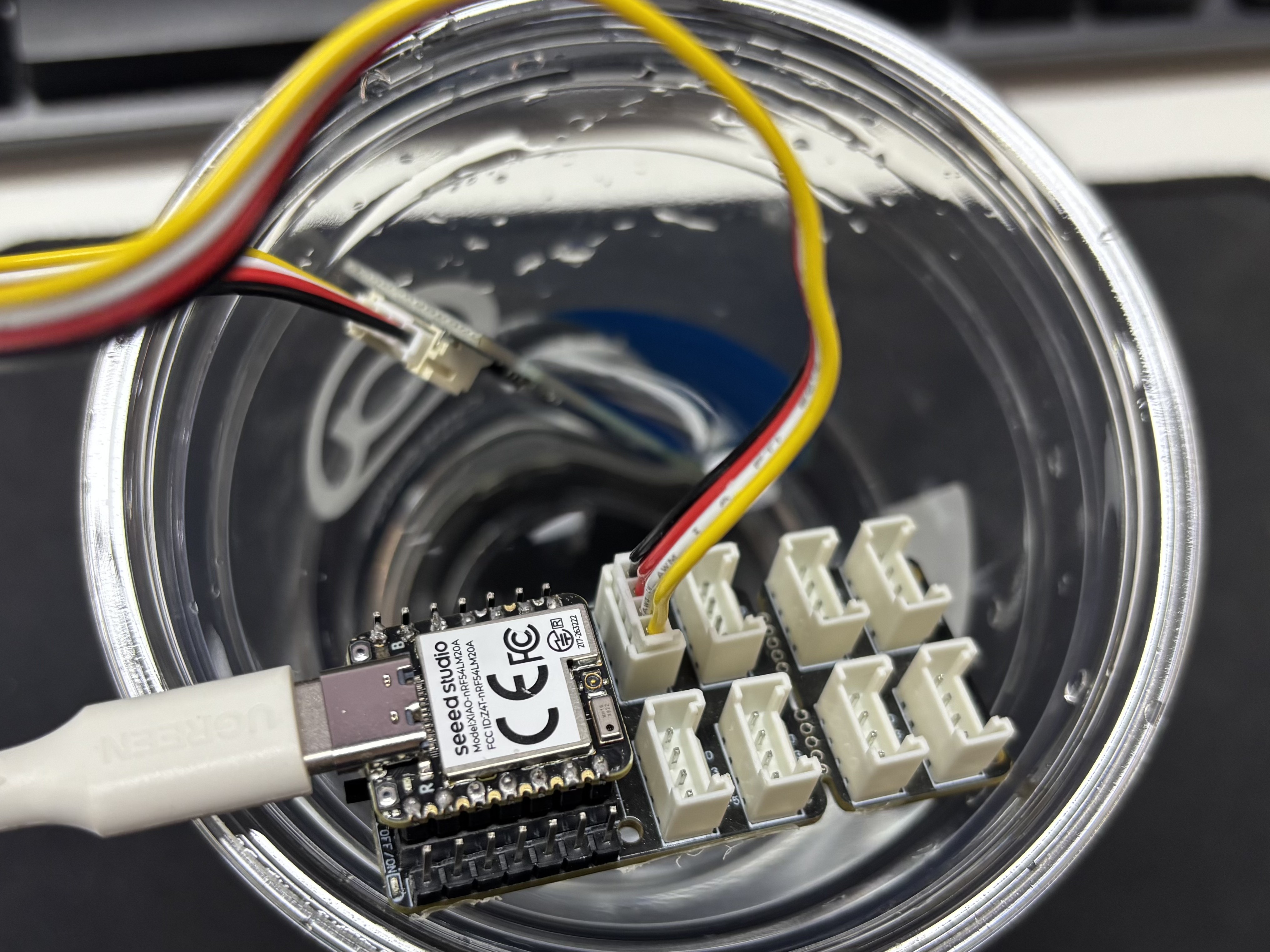
PC 上でシリアルポートアシスタントを開き、出力値を観察します。
電圧リファレンス読み取りテーブル
| 状態 | センサー出力電圧 | 期待される ADC 生データ値 |
|---|---|---|
| 空気中(乾燥) | 約 2.0–2.4V | 約 3400–4095 |
| 湿った土壌中 | 約 1.3–1.8V | 約 2200–3000 |
| 完全に水に浸した場合 | 約 0.8–1.2V | 約 1365–2048 |
部品ごとの個体差により、同じ環境でもモジュールごとの測定値が異なる場合があります。
UART
Universal Asynchronous Receiver/Transmitter(UART)は、標準的な非同期シリアル通信プロトコルです。同期のための外部クロック信号を必要とせず、両端で事前に設定したボーレートに基づいてデータの送受信を行います。TX ピンと RX ピンをクロス接続するだけで、全二重のデータリンクを確立できます。
ハードウェアの準備
| Seeed Studio XIAO nRF54LM20A Sense | CH340G USB-to-Serial TTL Module Adapter |
|---|---|
 | |
ソフトウェアの準備
XIAO nRF54LM20A Sense のピン配置によると、D6 (P1.08) と D7 (P1.09) が UART 通信の TX および RX ピンとして、ボーレート 115200 で使用されます。
- XIAO nRF54LM20A Sense のピン配置については、XIAO nRF54LM20A Pin List をクリックして詳細を確認してください。
import time
from machine import UART
from boards.xiao_nrf54lm20a import xiao_nrf54lm20a as xiao
uart_id = xiao.uart("uart1") # → "uart21"
uart = None
try:
uart = UART(uart_id, baudrate=115200)
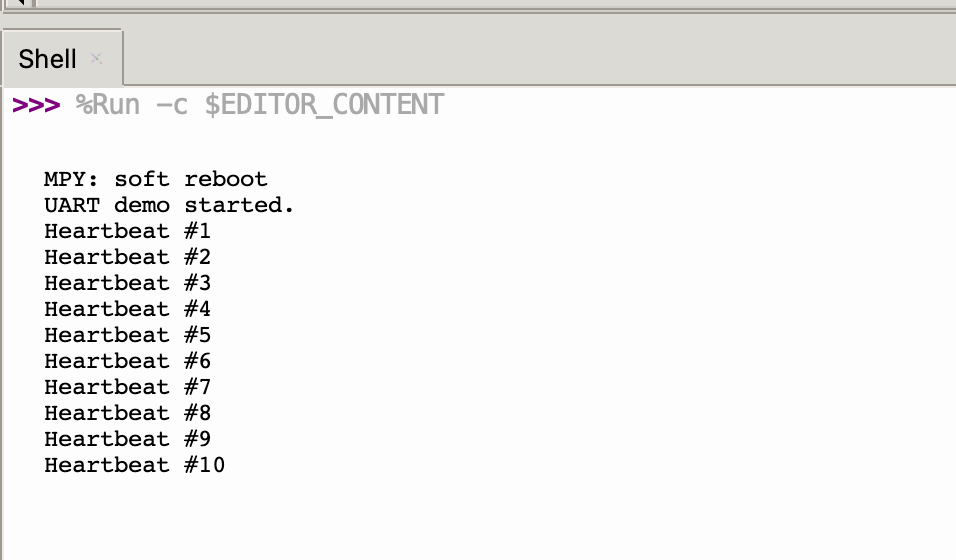
print("UART demo started.")
uart.write("========================================\r\n")
uart.write(" UART Demo for XIAO nRF54LM20A Sense\r\n")
uart.write("========================================\r\n")
uart.write("Pin Configuration:\r\n")
uart.write(" TX: D6 (P1.08)\r\n")
uart.write(" RX: D7 (P1.09)\r\n")
uart.write(" Baud Rate: 115200\r\n")
uart.write("\r\nType something and press Enter to see it echoed.\r\n\r\n")
heartbeat_count = 0
last_heartbeat = time.ticks_ms()
while True:
if uart.any():
data = uart.read()
if data:
uart.write(data)
now = time.ticks_ms()
if time.ticks_diff(now, last_heartbeat) >= 5000:
last_heartbeat = now
heartbeat_count += 1
uart.write("\r\n[Heartbeat #%d]\r\n" % heartbeat_count)
print("Heartbeat #%d" % heartbeat_count)
time.sleep_ms(10)
except KeyboardInterrupt:
print("\nStopped by user")
except Exception as e:
print("\nError: %s" % e)
finally:
if uart is not None:
uart.deinit()
コードの説明:
- インポートとピンマッピング:
machine.UARTはハードウェア UART へのアクセスを提供します。xiao.pin(n)は、ボード定義から指定したデジタルピン番号に対応するポートとピンのタプルを返します。 - 初期化: UART 1 は、D6 (P1.08) を TX、D7 (P1.09) を RX として、ボーレート 115200 で設定されます。起動時にウェルカムメッセージが送信されます。
- メインループ: 受信したデータをエコーバックします。UART が動作し続けていることを確認するため、5 秒ごとにハートビートメッセージを送信します。
- クリーンアップ:
uart.deinit()は、finallyブロック内で UART ハードウェアを解放します。
結果
- 次の表に従って配線します:
| XIAO nRF54LM20A Sense | CH340 |
|---|---|
| VBUS | 5V |
| GND | GND |
| D6 (P1.08) - TX | RX |
| D7 (P1.09) - RX | TX |
- パソコンでシリアルポートモニタリングソフトウェアを開きます。設定された UART 情報が起動時に出力されます。デフォルトでは、
[Heartbeat #N] UART running...という文字列が 5 秒ごとに出力されます。
I2C
I2C は同期式の半二重データ通信プロトコルです。SCL クロックラインと SDA データラインを介したアドレッシングによって複数デバイスの接続を可能にし、IMU や温湿度センサーなどのセンサーからデータを読み取ったり、OLED ディスプレイ出力に使用されたりするのが一般的です。
ハードウェアの準備
| Seeed Studio XIAO nRF54LM20A Sense | Seeed Studio Expansion Board Base for XIAO |
|---|---|
 | |
ソフトウェアの準備
XIAO nRF54LM20A Sense のピン配置によると、D4 (P1.03) と D5 (P1.07) が、それぞれ I2C の SDA および SCL ピンとして設定されています。この例では、I2C 経由で SSD1306 128×64 OLED ディスプレイを駆動します。
- XIAO nRF54LM20A Sense のピン配置については、XIAO nRF54LM20A Pin List をクリックして詳細を確認してください。
oled.py
"""
SSD1306 128x64 OLED display via I2C on XIAO nRF54LM20A Sense.
SDA: D4 (P1.03), SCL: D5 (P1.07)
"""
import time
from boards.xiao import XiaoI2C
SDA = 4 # D4 → P1.03
SCL = 5 # D5 → P1.07
I2C_BUS = "i2c0"
FREQ = 400_000 # 400 kHz
# --- SSD1306 I2C address and command definitions ---
SSD1306_I2C_ADDR = 0x3C
SSD1306_SET_CONTRAST = 0x81
SSD1306_DISPLAY_ALL_ON_RESUME = 0xA4
SSD1306_DISPLAY_ALL_ON = 0xA5
SSD1306_NORMAL_DISPLAY = 0xA6
SSD1306_INVERT_DISPLAY = 0xA7
SSD1306_DISPLAY_OFF = 0xAE
SSD1306_DISPLAY_ON = 0xAF
SSD1306_SET_DISPLAY_OFFSET = 0xD3
SSD1306_SET_COM_PINS = 0xDA
SSD1306_SET_VCOM_DETECT = 0xDB
SSD1306_SET_DISPLAY_CLOCK_DIV = 0xD5
SSD1306_SET_PRECHARGE = 0xD9
SSD1306_SET_MULTIPLEX = 0xA8
SSD1306_SET_LOW_COLUMN = 0x00
SSD1306_SET_HIGH_COLUMN = 0x10
SSD1306_SET_START_LINE = 0x40
SSD1306_MEMORY_MODE = 0x20
SSD1306_COLUMN_ADDR = 0x21
SSD1306_PAGE_ADDR = 0x22
SSD1306_COM_SCAN_INC = 0xC0
SSD1306_COM_SCAN_DEC = 0xC8
SSD1306_SEG_REMAP = 0xA0
SSD1306_CHARGE_PUMP = 0x8D
# Display dimensions
SSD1306_WIDTH = 128
SSD1306_HEIGHT = 64
SSD1306_PAGES = 8
# Basic 8x8 font data
font_data = {
' ': [0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00],
'A': [0x18,0x24,0x42,0x7E,0x42,0x42,0x42,0x00],
'B': [0x7C,0x42,0x42,0x7C,0x42,0x42,0x7C,0x00],
'C': [0x3C,0x42,0x40,0x40,0x40,0x42,0x3C,0x00],
'D': [0x78,0x44,0x42,0x42,0x42,0x44,0x78,0x00],
'E': [0x7C,0x40,0x40,0x78,0x40,0x40,0x7C,0x00],
'F': [0x7C,0x40,0x40,0x78,0x40,0x40,0x40,0x00],
'G': [0x3C,0x42,0x40,0x4E,0x42,0x42,0x3C,0x00],
'H': [0x44,0x44,0x44,0x7C,0x44,0x44,0x44,0x00],
'I': [0x38,0x10,0x10,0x10,0x10,0x10,0x38,0x00],
'J': [0x1C,0x08,0x08,0x08,0x08,0x48,0x30,0x00],
'K': [0x44,0x48,0x50,0x60,0x50,0x48,0x44,0x00],
'L': [0x40,0x40,0x40,0x40,0x40,0x40,0x7C,0x00],
'M': [0x42,0x66,0x5A,0x42,0x42,0x42,0x42,0x00],
'N': [0x42,0x62,0x52,0x4A,0x46,0x42,0x42,0x00],
'O': [0x3C,0x42,0x42,0x42,0x42,0x42,0x3C,0x00],
'P': [0x7C,0x42,0x42,0x7C,0x40,0x40,0x40,0x00],
'Q': [0x3C,0x42,0x42,0x42,0x4A,0x44,0x3A,0x00],
'R': [0x7C,0x42,0x42,0x7C,0x48,0x44,0x42,0x00],
'S': [0x3C,0x42,0x40,0x3C,0x02,0x42,0x3C,0x00],
'T': [0x7C,0x10,0x10,0x10,0x10,0x10,0x10,0x00],
'U': [0x42,0x42,0x42,0x42,0x42,0x42,0x3C,0x00],
'V': [0x42,0x42,0x42,0x42,0x42,0x24,0x18,0x00],
'W': [0x42,0x42,0x42,0x42,0x5A,0x66,0x42,0x00],
'X': [0x42,0x24,0x18,0x18,0x18,0x24,0x42,0x00],
'Y': [0x44,0x44,0x28,0x10,0x10,0x10,0x10,0x00],
'Z': [0x7E,0x04,0x08,0x10,0x20,0x40,0x7E,0x00],
'0': [0x3C,0x42,0x46,0x4A,0x52,0x62,0x3C,0x00],
'1': [0x10,0x30,0x10,0x10,0x10,0x10,0x38,0x00],
'2': [0x3C,0x42,0x02,0x0C,0x30,0x40,0x7E,0x00],
'3': [0x3C,0x42,0x02,0x1C,0x02,0x42,0x3C,0x00],
'4': [0x08,0x18,0x28,0x48,0x7E,0x08,0x08,0x00],
'5': [0x7E,0x40,0x7C,0x02,0x02,0x42,0x3C,0x00],
'6': [0x1C,0x20,0x40,0x7C,0x42,0x42,0x3C,0x00],
'7': [0x7E,0x42,0x04,0x08,0x10,0x10,0x10,0x00],
'8': [0x3C,0x42,0x42,0x3C,0x42,0x42,0x3C,0x00],
'9': [0x3C,0x42,0x42,0x3E,0x02,0x04,0x38,0x00],
'!': [0x10,0x10,0x10,0x10,0x10,0x00,0x10,0x00],
'?': [0x3C,0x42,0x02,0x0C,0x10,0x00,0x10,0x00],
'.': [0x00,0x00,0x00,0x00,0x00,0x00,0x10,0x00],
',': [0x00,0x00,0x00,0x00,0x00,0x10,0x10,0x20],
':': [0x00,0x10,0x00,0x00,0x00,0x10,0x00,0x00],
';': [0x00,0x10,0x00,0x00,0x00,0x10,0x10,0x20],
'-': [0x00,0x00,0x00,0x7C,0x00,0x00,0x00,0x00],
'_': [0x00,0x00,0x00,0x00,0x00,0x00,0x7E,0x00],
'+': [0x00,0x10,0x10,0x7C,0x10,0x10,0x00,0x00],
'*': [0x00,0x24,0x18,0x7E,0x18,0x24,0x00,0x00],
'/': [0x02,0x04,0x08,0x10,0x20,0x40,0x00,0x00],
'\\': [0x40,0x20,0x10,0x08,0x04,0x02,0x00,0x00],
'=': [0x00,0x00,0x7E,0x00,0x7E,0x00,0x00,0x00],
'\'': [0x10,0x10,0x20,0x00,0x00,0x00,0x00,0x00],
'"': [0x24,0x24,0x00,0x00,0x00,0x00,0x00,0x00],
'(': [0x08,0x10,0x20,0x20,0x20,0x10,0x08,0x00],
')': [0x20,0x10,0x08,0x08,0x08,0x10,0x20,0x00],
'[': [0x1C,0x10,0x10,0x10,0x10,0x10,0x1C,0x00],
']': [0x38,0x08,0x08,0x08,0x08,0x08,0x38,0x00],
'{': [0x0C,0x10,0x10,0x60,0x10,0x10,0x0C,0x00],
'}': [0x30,0x08,0x08,0x06,0x08,0x08,0x30,0x00],
'<': [0x08,0x10,0x20,0x40,0x20,0x10,0x08,0x00],
'>': [0x20,0x10,0x08,0x04,0x08,0x10,0x20,0x00],
'|': [0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x00],
'@': [0x3C,0x42,0x5A,0x5A,0x5C,0x40,0x3C,0x00],
'#': [0x24,0x24,0x7E,0x24,0x7E,0x24,0x24,0x00],
'$': [0x10,0x3C,0x50,0x3C,0x12,0x3C,0x10,0x00],
'%': [0x62,0x64,0x08,0x10,0x26,0x46,0x00,0x00],
'^': [0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00],
'&': [0x30,0x48,0x50,0x20,0x54,0x48,0x34,0x00],
'~': [0x00,0x00,0x34,0x4C,0x00,0x00,0x00,0x00]
}
# --- Helper functions ---
def ssd1306_write_command(cmd):
i2c.writeto(SSD1306_I2C_ADDR, bytes([0x00, cmd]))
def ssd1306_write_commands(cmds):
data = bytearray([0x00] + list(cmds))
i2c.writeto(SSD1306_I2C_ADDR, data)
def ssd1306_write_data(data):
buffer = bytearray(len(data) + 1)
buffer[0] = 0x40
buffer[1:] = data
i2c.writeto(SSD1306_I2C_ADDR, buffer)
def ssd1306_clear():
ssd1306_write_commands(bytearray([SSD1306_COLUMN_ADDR, 0, SSD1306_WIDTH - 1]))
ssd1306_write_commands(bytearray([SSD1306_PAGE_ADDR, 0, SSD1306_PAGES - 1]))
empty_data = bytearray(SSD1306_WIDTH)
for _ in range(SSD1306_PAGES):
ssd1306_write_data(empty_data)
ssd1306_write_commands([SSD1306_COLUMN_ADDR, 0, SSD1306_WIDTH - 1])
def ssd1306_init():
commands = [
bytearray([SSD1306_DISPLAY_OFF]),
bytearray([SSD1306_SET_DISPLAY_CLOCK_DIV, 0x80]),
bytearray([SSD1306_SET_MULTIPLEX, SSD1306_HEIGHT - 1]),
bytearray([SSD1306_SET_DISPLAY_OFFSET, 0x00]),
bytearray([SSD1306_SET_START_LINE | 0x00]),
bytearray([SSD1306_CHARGE_PUMP, 0x14]),
bytearray([SSD1306_MEMORY_MODE, 0x00]),
bytearray([SSD1306_SEG_REMAP | 0x01]),
bytearray([SSD1306_COM_SCAN_DEC]),
bytearray([SSD1306_SET_COM_PINS, 0x12]),
bytearray([SSD1306_SET_CONTRAST, 0xCF]),
bytearray([SSD1306_SET_PRECHARGE, 0xF1]),
bytearray([SSD1306_SET_VCOM_DETECT, 0x40]),
bytearray([SSD1306_DISPLAY_ALL_ON_RESUME]),
bytearray([SSD1306_NORMAL_DISPLAY]),
bytearray([SSD1306_DISPLAY_ON])
]
for cmd in commands:
ssd1306_write_commands(cmd)
ssd1306_clear()
print("SSD1306 initialized successfully.")
ssd1306_write_commands([SSD1306_COLUMN_ADDR, 0, SSD1306_WIDTH - 1])
def ssd1306_draw_text(text, x, y):
ssd1306_write_commands(bytearray([SSD1306_COLUMN_ADDR, x, x + len(text) * 8 - 1]))
ssd1306_write_commands(bytearray([SSD1306_PAGE_ADDR, y, y + 0]))
display_data = bytearray()
for char in text:
font_bytes = font_data.get(char.upper(), font_data[' '])
for col in range(7, -1, -1):
val = 0
for row in range(8):
if font_bytes[row] & (1 << col):
val |= (1 << row)
display_data.append(val)
ssd1306_write_data(display_data)
try:
i2c = XiaoI2C(I2C_BUS, SDA, SCL, FREQ)
print("I2C initialized on %s (SDA: D%d, SCL: D%d)" % (I2C_BUS, SDA, SCL))
i2c_addr = i2c.scan()
if SSD1306_I2C_ADDR not in i2c_addr:
raise Exception("SSD1306 not found on I2C bus")
else:
print("SSD1306 found on I2C bus: 0x{:02X}".format(SSD1306_I2C_ADDR))
# Initialize display and draw text
ssd1306_init()
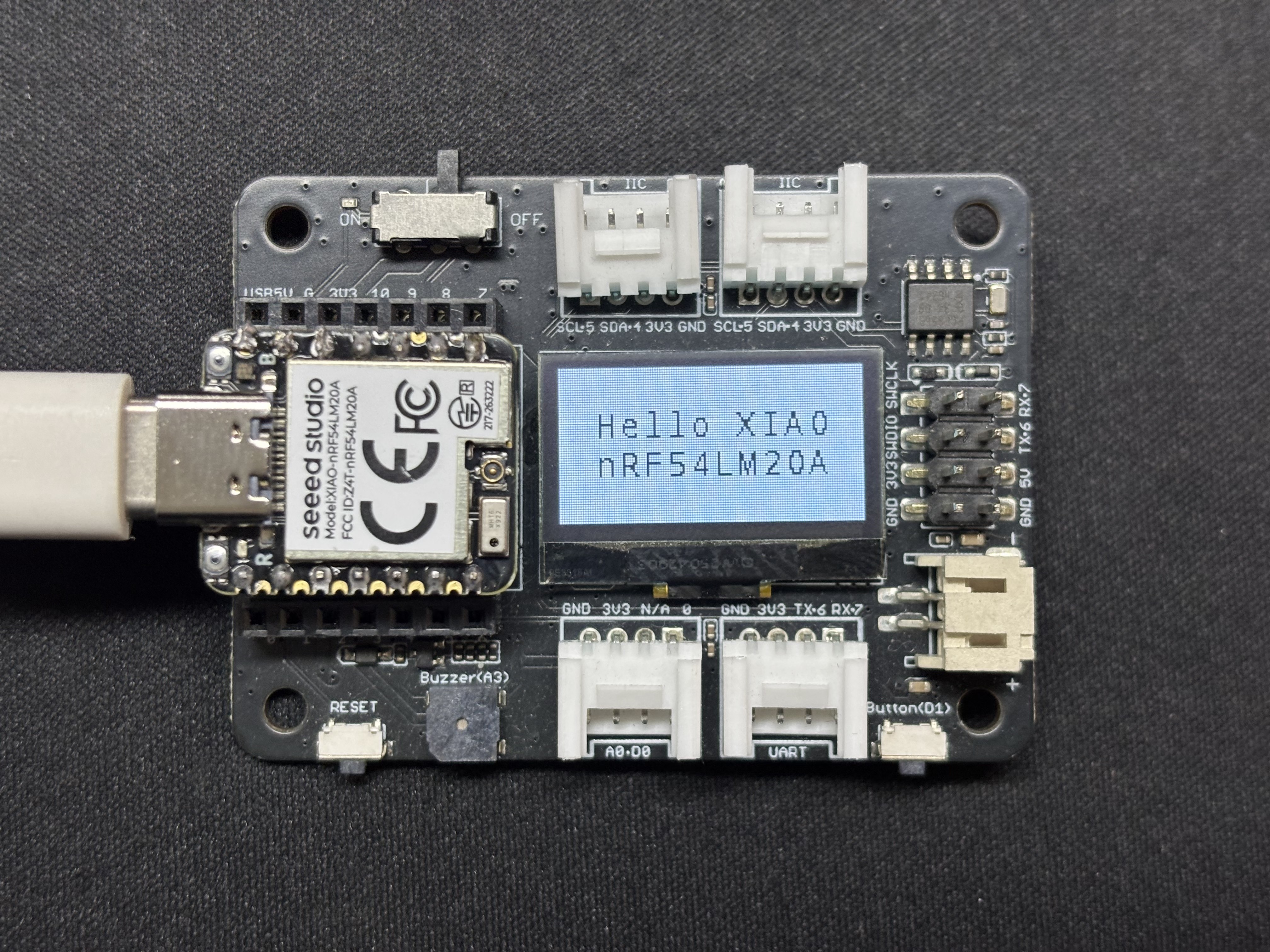
ssd1306_draw_text("NRF54LM20A", 22, 2)
ssd1306_draw_text("HELLO WORLD", 20, 4)
print("Display updated. Running...")
while True:
time.sleep(1)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
コード解説:
- インポートとピン定義:
boards.xiaoのXiaoI2Cは I2C バス管理を提供します。SDA は D4(P1.03)、SCL は D5(P1.07)に割り当てられ、バスは 400 kHz で動作します。 - SSD1306 ドライバ: SSD1306 OLED ディスプレイは、生の I2C コマンド/データ書き込みで制御します。
ssd1306_write_command()、ssd1306_write_data()、ssd1306_clear()、ssd1306_init()、ssd1306_draw_text()のヘルパー関数によって、最小限のドライバを構成しています。 - フォントデータ: 8×8 ビットマップフォントのディクショナリが、印字可能な ASCII 文字のグリフ定義を提供します。
ssd1306_draw_text()関数は、テキスト文字列をグリフビットマップに引き当ててディスプレイに送信することで描画します。 - メインロジック: I2C バスをスキャンして、SSD1306 がアドレス
0x3Cに存在することを確認します。ディスプレイを初期化し、中央揃えの 2 行のテキスト("NRF54LM20A" と "HELLO WORLD")を描画します。 - クリーンアップ:
try/exceptブロックにより、キーボード割り込みやエラー発生時に正常に終了処理を行います。
実行結果
プログラムの実行後、テキスト NRF54LM20A と HELLO WORLD が画面に表示され、ステータス情報が USB シリアルポート経由で出力されます。
SPI
SPI は、高速で同期式かつフルデュプレックスの通信プロトコルです。データ同期のための専用 SCK クロックラインに依存し、MOSI、MISO、SCK、CS/SS ピンから成る 4 線トポロジを採用します。高解像度ディスプレイの駆動、Flash/SD カードストレージ、高周波サンプリングセンサなどで広く利用されています。
ハードウェアの準備
| Seeed Studio XIAO nRF54LM20A Sense | Round Display for Seeed Studio XIAO |
|---|---|
 | |
ソフトウェアの準備
XIAO nRF54LM20A Sense のピン配置に従い、SPI 設定では次のピンを使用します:
| 機能 | デジタルピン | 物理ピン |
|---|---|---|
| SCK | D8 | P1.04 |
| MOSI | D10 | P1.06 |
| MISO | D9 | P1.05 |
| CS | D1 | P1.31 |
| DC | D3 | P1.29 |
- XIAO nRF54LM20A Sense のピン配置については、XIAO nRF54LM20A Pin List をクリックして詳細を確認してください。
import time
from machine import Pin, SPI
from boards.xiao_nrf54lm20a import xiao_nrf54lm20a as xiao
cs = Pin(("gpio1", 31), Pin.OUT) # D1
dc = Pin(("gpio1", 29), Pin.OUT) # D3
bl = Pin(("gpio1", 8), Pin.OUT)
rst = Pin(("gpio1", 30), Pin.OUT) # D2
spi_id = xiao.spi("spi0")
spi = SPI(spi_id, baudrate=8000000, polarity=0, phase=0)
cs.value(1)
dc.value(1)
bl.value(1)
LCD_W = 240
LCD_H = 240
def write_command(cmd):
dc.value(0); cs.value(0)
spi.write(bytearray([cmd & 0xFF]))
cs.value(1)
def write_data(data):
dc.value(1); cs.value(0)
if isinstance(data, int):
spi.write(bytearray([data & 0xFF]))
else:
spi.write(bytearray(data))
cs.value(1)
def set_addr_window(x0, y0, x1, y1):
dc.value(0); cs.value(0)
spi.write(bytearray([0x2A]))
dc.value(1)
spi.write(bytearray([x0>>8, x0&0xFF, x1>>8, x1&0xFF]))
cs.value(1)
dc.value(0); cs.value(0)
spi.write(bytearray([0x2B]))
dc.value(1)
spi.write(bytearray([y0>>8, y0&0xFF, y1>>8, y1&0xFF]))
cs.value(1)
dc.value(0); cs.value(0)
spi.write(bytearray([0x2C]))
cs.value(1)
def init_display():
# Hardware reset (if reset pin is connected)
rst.value(1)
time.sleep_ms(10)
rst.value(0)
time.sleep_ms(10)
rst.value(1)
time.sleep_ms(120)
# GC9A01 full initialization sequence
write_command(0xEF)
write_command(0xEB)
write_data(0x14)
write_command(0xFE)
write_command(0xEF)
write_command(0xEB)
write_data(0x14)
write_command(0x84)
write_data(0x40)
write_command(0x85)
write_data(0xFF)
write_command(0x86)
write_data(0xFF)
write_command(0x87)
write_data(0xFF)
write_command(0x88)
write_data(0x0A)
write_command(0x89)
write_data(0x21)
write_command(0x8A)
write_data(0x00)
write_command(0x8B)
write_data(0x80)
write_command(0x8C)
write_data(0x01)
write_command(0x8D)
write_data(0x01)
write_command(0x8E)
write_data(0xFF)
write_command(0x8F)
write_data(0xFF)
write_command(0xB6)
write_data(0x00)
write_data(0x20)
write_command(0x36)
write_data(0x08) # Memory access control, adjust rotation direction as needed
write_command(0x3A)
write_data(0x05) # RGB565 16-bit color mode
write_command(0x90)
write_data(0x08)
write_data(0x08)
write_data(0x08)
write_data(0x08)
write_command(0xBD)
write_data(0x06)
write_command(0xBC)
write_data(0x00)
write_command(0xFF)
write_data(0x60)
write_data(0x01)
write_data(0x04)
write_command(0xC3)
write_data(0x13)
write_command(0xC4)
write_data(0x13)
write_command(0xC9)
write_data(0x22)
write_command(0xBE)
write_data(0x11)
write_command(0xE1)
write_data(0x10)
write_data(0x0E)
write_command(0xDF)
write_data(0x21)
write_data(0x0c)
write_data(0x02)
write_command(0xF0)
write_data(0x45)
write_data(0x09)
write_data(0x08)
write_data(0x08)
write_data(0x26)
write_data(0x2A)
write_command(0xF1)
write_data(0x43)
write_data(0x70)
write_data(0x72)
write_data(0x36)
write_data(0x37)
write_data(0x6F)
write_command(0xF2)
write_data(0x45)
write_data(0x09)
write_data(0x08)
write_data(0x08)
write_data(0x26)
write_data(0x2A)
write_command(0xF3)
write_data(0x43)
write_data(0x70)
write_data(0x72)
write_data(0x36)
write_data(0x37)
write_data(0x6F)
write_command(0xED)
write_data(0x1B)
write_data(0x0B)
write_command(0xAE)
write_data(0x77)
write_command(0xCD)
write_data(0x63)
write_command(0x70)
write_data(0x07)
write_data(0x07)
write_data(0x04)
write_data(0x0E)
write_data(0x0F)
write_data(0x09)
write_data(0x07)
write_data(0x08)
write_data(0x03)
write_command(0xE8)
write_data(0x34)
write_command(0x62)
write_data(0x18)
write_data(0x0D)
write_data(0x71)
write_data(0xED)
write_data(0x70)
write_data(0x70)
write_data(0x18)
write_data(0x0F)
write_data(0x71)
write_data(0xEF)
write_data(0x70)
write_data(0x70)
write_command(0x63)
write_data(0x18)
write_data(0x11)
write_data(0x71)
write_data(0xF1)
write_data(0x70)
write_data(0x70)
write_data(0x18)
write_data(0x13)
write_data(0x71)
write_data(0xF3)
write_data(0x70)
write_data(0x70)
write_command(0x64)
write_data(0x28)
write_data(0x29)
write_data(0xF1)
write_data(0x01)
write_data(0xF1)
write_data(0x00)
write_data(0x07)
write_command(0x66)
write_data(0x3C)
write_data(0x00)
write_data(0xCD)
write_data(0x67)
write_data(0x45)
write_data(0x45)
write_data(0x10)
write_data(0x00)
write_data(0x00)
write_data(0x00)
write_command(0x67)
write_data(0x00)
write_data(0x3C)
write_data(0x00)
write_data(0x00)
write_data(0x00)
write_data(0x01)
write_data(0x54)
write_data(0x10)
write_data(0x32)
write_data(0x98)
write_command(0x74)
write_data(0x10)
write_data(0x85)
write_data(0x80)
write_data(0x00)
write_data(0x00)
write_data(0x4E)
write_data(0x00)
write_command(0x98)
write_data(0x3e)
write_data(0x07)
write_command(0x35)
write_command(0x21)
write_command(0x11)
time.sleep_ms(120)
write_command(0x29)
time.sleep_ms(120)
bl.value(0)
print("Seeed Studio Round Display & Backlight Active!")
def fill_screen(color):
hi = (color >> 8) & 0xFF
lo = color & 0xFF
set_addr_window(0, 0, LCD_W-1, LCD_H-1)
dc.value(1); cs.value(0)
buf = bytearray([hi, lo] * LCD_W)
for _ in range(LCD_H):
spi.write(buf)
cs.value(1)
init_display()
colors = [
(0xF800, "RED"),
(0x07E0, "GREEN"),
(0x001F, "BLUE"),
(0xFFE0, "YELLOW"),
(0x07FF, "CYAN"),
(0xF81F, "MAGENTA"),
(0x0000, "BLACK"),
(0xFFFF, "WHITE"),
]
while True:
for color, name in colors:
print("Solid: %s" % name)
fill_screen(color)
time.sleep_ms(1000)
結果
プログラムを実行すると、ラウンドディスプレイは赤、緑、青、黄、シアン、マゼンタの順に更新されます。
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます。私たちは、製品をできるだけスムーズにご利用いただけるよう、さまざまなサポートを提供しています。お好みやニーズに応じてお選びいただける、複数のコミュニケーションチャネルをご用意しています。