Seeed Studio XIAO RA4M1 と MicroPython
MicroPython は、部分的なネイティブコードコンパイル機能を持つ Python インタープリターです。組み込みプロセッサーと制約のあるシステム向けに実装された Python 3.5 機能のサブセットを提供します。CircuitPython とは異なり、違いについては MicroPython ドキュメント で詳しく読むことができます。
XIAO RA4M1 で MicroPython を使用する
次に、Windows オペレーティングシステムを基に、XIAO MG24 Senese で MicroPython を使用し、Thonny IDE でプログラムする方法をガイドします。
ハードウェアの準備

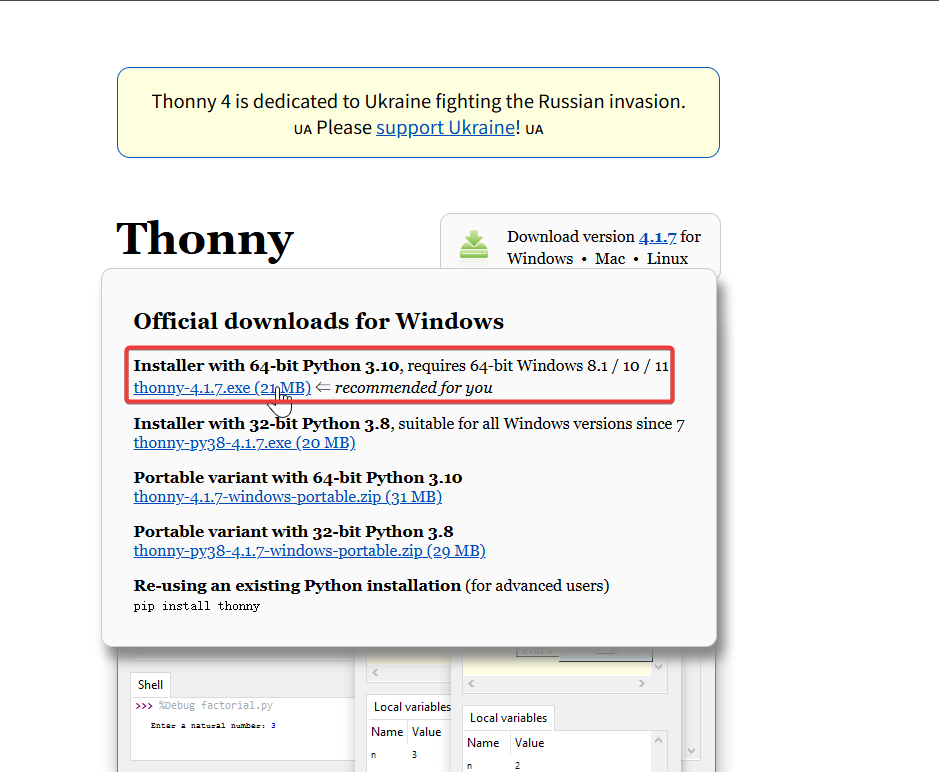
Thonny IDE のインストール
インストールに適したバージョンを選択してください。ここでは Windows システムにインストールするため、Windows バージョンを選択しました。
希望する Python バージョンの指示に従ってください。
その後、設定のデフォルト手順に従ってください。
リポジトリのダウンロード
ローカルマシンにクローンし、この XIAO RA4M1 MicroPython が保存されているパスを覚えておいてください。このパスは後で使用します。
git clone https://github.com/Seeed-Studio/micropython-seeed-boards.git
LED 点滅の例
ここでは、Thonny IDE で MicroPython を使用して XIAO MG24 の USER LED を点灯させる方法を示します。
ステップ 1. MicroPython ファームウェアの書き込み
-
XIAO RA4M1 MicroPython ファームウェア パッケージをダウンロードし、適切な場所に展開します。その後、このフォルダでターミナルを開きます。
-
XIAO RA4M1 を XIAO XIAO Debug Mate に挿入します。

- xiao_ra4m1_flash.bat をクリックし、プログラミングが完了するまで待ちます。

- Mac / Linux の場合
sudo chmod +x xiao_ra4m1_flash.sh && ./xiao_ra4m1_flash.sh
このスクリプトには事前設定された書き込みツールチェーンコマンドがあります。初回使用時は少し時間がかかる場合があります。
ファームウェアのプログラミングが完了したら、XIAO RA4M1 を XIAO XIAO XIAO Debug Mate から取り外し、USB-C で接続する必要があります。
ステップ 2. インタープリターの設定
Thonny IDE を開き、インターフェースの右下角をクリックしてインタープリターオプションを設定します。MicroPython (generic) とポートを選択します。設定が成功すると、Shell に MicroPython バージョン情報が表示されます。

ステップ 3. boards ファイルのアップロード
- ビューを開き、File を選択すると、ファイルマネージャーパスが左サイドバーに表示されます。

- クローンまたはダウンロードしたファイルのパスを開き、
micropython-seeed-boards-master\examplesを開きます - boards フォルダには複数の xiao Python ファイルがありますが、XIAO RAM41 のフラッシュメモリ容量は限られているため、
xiao.pyとxiao_ra4m1.pyの 2 つのファイルのみを保持する必要があります。

- boards フォルダを選択してフラッシュにアップロードします。その後、MicroPython デバイス/フラッシュでアップロードされたファイルを確認できます。

ステップ 4. コードの実行
File -> New をクリックして新しいファイルを作成し、blink.py として保存します。
import time
from boards.xiao import XiaoPin
led = "led"
try:
# Initialize LED
led = XiaoPin(led, XiaoPin.OUT)
while True:
# LED 0.5 seconds on, 0.5 seconds off
led.value(1)
time.sleep(0.5)
led.value(0)
time.sleep(0.5)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
led.value(1)
コードの説明:
-
モジュールのインポート
timetime モジュールをインポートXiao Pinboards.xiao モジュールから Seeed Xiao 開発ボード用のピン制御クラスをインポートし、ボード上のピンを操作するために使用
-
ピンの定義
led = "led""ピンが開発ボードのledピン(ここでは USER ピン)に接続されていることを指定
-
メインロジック(try ブロック)
- USER LED は 0.5 秒間隔で点滅します。
上記のコードをコピーし、緑色のボタンをクリックするか F5 を押して実行します。

コードが実行を開始すると、USER LED は 0.5 秒間隔で点滅します。
結果は以下の通りです:

PWM の例
XIAO RA4M1 では、ピン D5–D10 が PWM 機能をサポートしています。PWM ブリージングライトを例に、PWM 機能の使用方法を紹介します。
ハードウェアの準備
| Seeed Studio XIAO RA4M1 | Seeed Studio Grove Base for XIAO | Grove - Variable Color LED |
|---|---|---|
 |  |  |
ソフトウェア
- pwm.py という名前の新しいファイルを作成し、参考コードをコピーしてください。
- XIAO RA4M1 の D5~D10 ピンのみが PWM 機能をサポートしているため、ここでは D9 ピンを選択します。
import time
from boards.xiao import XiaoPWM
led = 9 #D9
try:
# set the frequency and period of the PWM signal
FREQ = 1000
PERIOD_NS = int(1_000_000_000 // FREQ)
# set the number of steps to fade the LED and the delay between steps
FADE_STEPS = 255
STEP_DELAY = 0.01
STEP_SIZE = 3
# initialize the PWM with a frequency and a 0% duty cycle
pwm = XiaoPWM(led)
pwm.init(freq=FREQ, duty=0)
while True:
# fade the LED in and out
for fade in range(0, FADE_STEPS + 1, STEP_SIZE):
duty_ns = int((fade * PERIOD_NS) / FADE_STEPS)
if duty_ns < 20:
duty_ns = 20
elif duty_ns > 960000:
duty_ns = 960000
pwm.duty_ns(duty_ns)
time.sleep(STEP_DELAY)
# fade the LED in and out again
for fade in range(FADE_STEPS, -1, -STEP_SIZE):
duty_ns = int((fade * PERIOD_NS) / FADE_STEPS)
if duty_ns < 20:
duty_ns = 20
elif duty_ns > 960000:
duty_ns = 960000
pwm.duty_ns(duty_ns)
time.sleep(STEP_DELAY)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s",repr(e))
finally:
if pwm is not None:
try:
pwm.deinit()
except Exception:
pass
コード説明:
-
モジュールのインポート
time:遅延を処理するための標準時間モジュールをインポートします(呼吸効果の速度制御に使用)。XiaoPWM:デジタルピンでアナログ信号のような信号を生成するために使用される、boards.xiaoモジュールから PWM(パルス幅変調)制御クラスをインポートします。
-
ピンと定数の定義
PIN = 0:デバイスが開発ボードの D0 ピンに接続されていることを指定します。 -FREQ / PERIOD_NS:PWM 周波数を 1000 Hz に設定し、ナノ秒単位での総周期(1 秒 / 1000)を計算します。FADE_STEPS / STEP_DELAY:アニメーション解像度(255 ステップ)と速度(変更間の 0.01 秒待機)を設定します。
-
メインロジック(try ブロック)
- 初期化:コードは D0 ピンで 0% の明度(デューティサイクル)から始まる PWM オブジェクトを初期化します。
- 呼吸ループ:無限の
while Trueループ内で、2 つのforループが LED の明度を制御します:- フェードイン:
duty_ns(パルス幅)を 0 から完全な周期時間まで徐々に増加させます。 - フェードアウト:
duty_nsを完全な周期から 0 まで徐々に減少させます。
- フェードイン:
-
デューティサイクル計算:式
(fade * PERIOD_NS) // FADE_STEPSは、ループステップ(0-255)を PWM ハードウェアに必要なナノ秒タイミングにマッピングします。- 安全性/クリーンアップ:
finallyブロックは、プログラムが停止された場合(例:Ctrl+C)にハードウェアリソースを解放するためにpwm.deinit()が呼び出されることを保証します。
- 安全性/クリーンアップ:
結果グラフ
プログラムが実行されると、LED はフェード効果を実現し、実際のニーズに応じて PWM ステップサイズを調整できます。

アナログ例
XIAO RA4M1 開発ボードは、アナログセンサー値の高解像度読み取りのための 12 ビット ADC を搭載しており、より正確な値を読み取ることができます。
次に、ADC の特性を反映するために 2 つのセンサーを選択します。
ハードウェア準備
| Seeed Studio XIAO RA4M1 | Seeed Studio Grove Base for XIAO | Grove - Variable Color LED | Grove-Rotary Angle Sensor |
|---|---|---|---|
| | |  |
ソフトウェア
- adc.py という名前の新しいファイルを作成し、参考コードをコピーしてください。
import time
from boards.xiao import XiaoPin, XiaoADC, XiaoPWM
adc_pin = 0 #D0
pwm_pin = 9 #D9
try:
adc = XiaoADC(adc_pin)
pwm = XiaoPWM(pwm_pin)
FREQ = 1000
PERIOD_NS = 1000000000 // FREQ
pwm.freq(FREQ)
pwm.duty_ns(0)
MAX_VOLTAGE = 3.3
DEAD_ZONE = 0.02
last_duty = -1
while True:
raw_value = adc.read_u16()
voltage = (raw_value / 65535.0) * MAX_VOLTAGE
# Calculate the base percentage (0.0 - 1.0)
duty_percent = voltage / MAX_VOLTAGE
# scope limitation
if duty_percent < 0: duty_percent = 0
if duty_percent > 1: duty_percent = 1
if abs(duty_percent - last_duty) < DEAD_ZONE:
time.sleep(0.05)
continue
inverted_duty = 1.0 - duty_percent
duty_ns = int(inverted_duty * PERIOD_NS)
if duty_ns < 20: duty_ns = 20
elif duty_ns > (PERIOD_NS * 0.96): duty_ns = int(PERIOD_NS * 0.96)
pwm.duty_ns(duty_ns)
print("Voltage: {:.2f}V, Brightness: {:.1f}%".format(voltage, duty_percent * 100))
last_duty = duty_percent
time.sleep(0.05)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: {}".format(e))
finally:
pwm.deinit()
-
モジュールのインポート
time:遅延を処理するための標準時間モジュールをインポートします(呼吸効果の速度制御に使用)。XiaoPWM:デジタルピンでアナログ信号のような信号を生成するために使用される、boards.xiaoモジュールから PWM(パルス幅変調)制御クラスをインポートします。 コード説明:
-
モジュールのインポート
time:遅延を処理するための標準時間モジュールをインポートします(ループのサンプリングレート制御に使用)。XiaoADC、XiaoPWM:boards.xiaoモジュールからハードウェア制御クラスをインポートします。XiaoADCはアナログ入力(ポテンショメータ)を処理し、XiaoPWMはパルス幅変調出力(LED)を処理します。
-
ピンと定数の定義
adc_pin = 0/pwm_pin = 1:物理ピンをマッピングします。D0 ピンは入力センサーに使用され、D1 ピンは出力 LED に使用されます。FREQ / PERIOD_NS:PWM 動作周波数を 1000 Hz に設定し、ナノ秒単位での周期時間(1,000,000 ns)を計算します。MAX_VOLTAGE / DEAD_ZONE:基準電圧(3.3V)と電気ノイズをフィルタリングし LED のちらつきを防ぐための 2% デッドゾーン閾値を定義します。
-
メインロジック(try ブロック)
- 初期化:ADC と PWM オブジェクトを設定します。PWM はデューティサイクル 0 で開始します。
- 制御ループ:
while Trueループ内で、コードは継続的にセンサーを監視します:- 読み取りと正規化:ADC から生の 16 ビット整数(0-65535)を読み取り、浮動小数点電圧(0.0V - 3.3V)に変換します。
- ジッターフィルタ:現在の読み取り値を
last_dutyと比較します。変化がDEAD_ZONE未満の場合、ループは安定性を維持するために更新をスキップします。
-
デューティサイクル計算とロジック反転
- アクティブローロジック:行
inverted_duty = 1.0 - duty_percentはロジックを反転させます。 - 理由:LED は アクティブロー(VCC に接続)である可能性があります。
- 効果:電圧が増加すると、
duty_nsは小さくなり(ピンを LOW により長く引く)、LED が 明るく なります。
- アクティブローロジック:行
-
安全クランプ:コードは出力信号を最小 20ns と周期の最大 96% の間に制限します。これによりハードウェアを保護し、信号が有効な範囲内に留まることを保証します。
-
出力とクリーンアップ
- フィードバック: 古いMicroPythonバージョンとの互換性のために
.format()を使用して、現在の電圧と明度パーセンテージをコンソールに出力します。 - 安全性/クリーンアップ:
finallyブロックは、プログラムが停止した際にpwm.deinit()が確実に実行され、PWMハードウェアリソースを安全に停止することを保証します。
- フィードバック: 古いMicroPythonバージョンとの互換性のために
結果グラフ
- Grove回転角度センサーを回転させると、LEDの明度がそれに応じて変化します。

- シェルウィンドウにも電圧と明度パーセンテージが出力されます。

UART例
UARTは最も一般的に使用される通信プロトコルの一つです。わずか2本のデータラインでデータ伝送が可能で、低コストであることから多くの分野で広く使用されています。次に、GPSモジュールデータの伝送を例として、シリアル通信の応用を実演します。
ハードウェア準備
ソフトウェア
- uart.pyという名前の新しいファイルを作成し、参考コードをコピーしてください。
参考コード
from boards.xiao import XiaoUART
import time
import math
uart = "uart1"
baudrate = 9600
tx = 6 # D6
rx = 7 # D7
# Coordinate structure
class Coordinates:
def __init__(self, Lon=0.0, Lat=0.0):
self.Lon = Lon
self.Lat = Lat
# GPS data structure
class GNRMC:
def __init__(self):
self.Lon = 0.0 # GPS Longitude
self.Lat = 0.0 # GPS Latitude
self.Lon_area = '' # E or W
self.Lat_area = '' # N or S
self.Time_H = 0 # Time Hour
self.Time_M = 0 # Time Minute
self.Time_S = 0 # Time Second
self.Status = 0 # 1: Successful positioning, 0: Positioning failed
# Convert WGS-84 to GCJ-02
def transformLat(x, y):
ret = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y + 0.1 * x * y + 0.2 * math.sqrt(abs(x))
ret += (20.0 * math.sin(6.0 * x * pi) + 20.0 * math.sin(2.0 * x * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(y * pi) + 40.0 * math.sin(y / 3.0 * pi)) * 2.0 / 3.0
ret += (160.0 * math.sin(y / 12.0 * pi) + 320 * math.sin(y * pi / 30.0)) * 2.0 / 3.0
return ret
# Convert WGS-84 to GCJ-02
def transformLon(x, y):
ret = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x * y + 0.1 * math.sqrt(abs(x))
ret += (20.0 * math.sin(6.0 * x * pi) + 20.0 * math.sin(2.0 * x * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(x * pi) + 40.0 * math.sin(x / 3.0 * pi)) * 2.0 / 3.0
ret += (150.0 * math.sin(x / 12.0 * pi) + 300.0 * math.sin(x / 30.0 * pi)) * 2.0 / 3.0
return ret
# Convert GCJ-02 to BD-09
def bd_encrypt(gg):
bd = Coordinates()
x = gg.Lon
y = gg.Lat
z = math.sqrt(x * x + y * y) + 0.00002 * math.sin(y * x_pi)
theta = math.atan2(y, x) + 0.000003 * math.cos(x * x_pi)
bd.Lon = z * math.cos(theta) + 0.0065
bd.Lat = z * math.sin(theta) + 0.006
return bd
# Convert WGS-84 to GCJ-02
def transform(gps):
gg = Coordinates()
dLat = transformLat(gps.Lon - 105.0, gps.Lat - 35.0)
dLon = transformLon(gps.Lon - 105.0, gps.Lat - 35.0)
radLat = gps.Lat / 180.0 * pi
magic = math.sin(radLat)
magic = 1 - ee * magic * magic
sqrtMagic = math.sqrt(magic)
dLat = (dLat * 180.0) / ((a * (1 - ee)) / (magic * sqrtMagic) * pi)
dLon = (dLon * 180.0) / (a / sqrtMagic * math.cos(radLat) * pi)
gg.Lat = gps.Lat + dLat
gg.Lon = gps.Lon + dLon
return gg
# Convert to Baidu coordinates (BD-09)
def L76X_Baidu_Coordinates(gps):
wgs84_coords = Coordinates(gps.Lon, gps.Lat)
gcj02_coords = transform(wgs84_coords)
bd09_coords = bd_encrypt(gcj02_coords)
return bd09_coords
# Convert to Google coordinates (GCJ-02)
def L76X_Google_Coordinates(gps):
wgs84_coords = Coordinates(gps.Lon, gps.Lat)
gcj02_coords = transform(wgs84_coords)
return gcj02_coords
# Parse GNRMC NMEA sentence
def parse_gnrmc(nmea_sentence):
gps = GNRMC()
if not nmea_sentence.startswith(b'$GNRMC') and not nmea_sentence.startswith(b'$PNRMC'):
return gps
try:
# Convert to string and split by commas
sentence_str = nmea_sentence.decode('ascii', 'ignore')
fields = sentence_str.split(',')
if len(fields) < 12:
return gps
# Parse time field (HHMMSS.sss)
if fields[1]:
time_str = fields[1]
if '.' in time_str:
time_str = time_str.split('.')[0]
if len(time_str) >= 6:
gps.Time_H = int(time_str[0:2]) + 8 # GMT+8
gps.Time_M = int(time_str[2:4])
gps.Time_S = int(time_str[4:6])
if gps.Time_H >= 24:
gps.Time_H -= 24
# Parse status
gps.Status = 1 if fields[2] == 'A' else 0
if gps.Status == 1:
# Parse latitude (DDMM.MMMMM)
if fields[3] and fields[4]:
lat_str = fields[3]
if '.' in lat_str:
degrees = float(lat_str[0:2])
minutes = float(lat_str[2:])
gps.Lat = degrees + minutes / 60.0
gps.Lat_area = fields[4]
# Parse longitude (DDDMM.MMMMM)
if fields[5] and fields[6]:
lon_str = fields[5]
if '.' in lon_str:
degrees = float(lon_str[0:3])
minutes = float(lon_str[3:])
gps.Lon = degrees + minutes / 60.0
gps.Lon_area = fields[6]
except Exception as e:
print("Parse error:", e)
return gps
# Print formatted GPS data
def print_gps_data(gps):
print("\n--- GPS Data ---")
print("Time (GMT+8): {:02d}:{:02d}:{:02d}".format(gps.Time_H, gps.Time_M, gps.Time_S))
if gps.Status == 1:
print("Latitude (WGS-84): {:.6f} {}".format(gps.Lat, gps.Lat_area))
print("Longitude (WGS-84): {:.6f} {}".format(gps.Lon, gps.Lon_area))
# Coordinate conversion
baidu_coords = L76X_Baidu_Coordinates(gps)
google_coords = L76X_Google_Coordinates(gps)
print("Baidu Latitude: {:.6f}".format(baidu_coords.Lat))
print("Baidu Longitude: {:.6f}".format(baidu_coords.Lon))
print("Google Latitude: {:.6f}".format(google_coords.Lat))
print("Google Longitude: {:.6f}".format(google_coords.Lon))
print("GPS positioning successful.")
else:
print("GPS positioning failed or no valid data.")
try:
uart = XiaoUART(uart, baudrate, tx, rx)
# Initialize UART
uart.init(9600, bits=8, parity=None, stop=1)
# Buffer to accumulate complete messages
buffer = bytearray()
# Constants for coordinate transformation
pi = 3.14159265358979324
a = 6378245.0
ee = 0.00669342162296594323
x_pi = 3.14159265358979324 * 3000.0 / 180.0
while True:
available = uart.any()
if available > 0:
# Read all available bytes
data = uart.read(available)
buffer.extend(data)
# Check if we have a complete line (ends with newline)
if b'\n' in buffer:
# Find the newline position
newline_pos = buffer.find(b'\n')
# Extract the complete message
complete_message = buffer[:newline_pos + 1]
# Remove the processed part from buffer
buffer = buffer[newline_pos + 1:]
# Parse GNRMC sentences
if complete_message.startswith(b'$GNRMC') or complete_message.startswith(b'$PNRMC'):
gps_data = parse_gnrmc(complete_message)
print_gps_data(gps_data)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
uart.deinit()
コード説明:
-
モジュールのインポート
XiaoUARTboards.xiaoモジュールからSeeed Xiao開発ボード用のUART通信クラスをインポートし、シリアル通信の初期化と制御に使用します。timeタイミング関連機能をサポートするためにtimeモジュールをインポートします(ここでは直接使用されませんが、将来の使用や互換性のためにインポートされています)。math座標変換アルゴリズムに必要な数学関数(sin、cos、sqrt、atan2など)をインポートします。
-
UART設定の定義
uart = "uart1"使用するUARTコントローラインスタンスを指定 — ここではuart1。baudrate = 9600シリアル通信のボーレートを9600 bpsに設定。tx = 6UART送信ピン(TX)がデジタルピンD6に接続されていることを指定。rx = 7UART受信ピン(RX)がデジタルピンD7に接続されていることを指定。
-
データ構造の定義
Coordinatesクラス:経度/緯度の値を浮動小数点数として格納するシンプルなコンテナ。GNRMCクラス:$GNRMCNMEA文から解析されたGPSデータを表現。以下を含む:- 十進度での緯度/経度
- 半球指示子(
N/S、E/W) - 時刻(時、分、秒 — GMT+8に調整)
- ステータスフラグ(1 = 有効な測位、0 = 測位なし)
-
座標変換関数
transformLat(x, y)&transformLon(x, y)— WGS-84 → GCJ-02変換アルゴリズムの一部を実装するヘルパー関数(中国での地図難読化に使用)。bd_encrypt(gg)— 追加のオフセットと回転を適用してGCJ-02座標をBaiduのBD-09座標系に変換。transform(gps)— 楕円地球モデルに基づく複雑な三角関数式を使用してWGS-84(生GPS)座標をGCJ-02に変換するメイン関数。L76X_Baidu_Coordinates(gps)— 生GPS(WGS-84)→ GCJ-02 → BD-09(Baidu Maps形式)に変換するラッパー。L76X_Google_Coordinates(gps)— 生GPS(WGS-84)→ GCJ-02(中国でのGoogle Maps形式)に変換するラッパー。
-
GNRMC文の解析
parse_gnrmc(nmea_sentence)— 生NMEA$GNRMCまたは$PNRMC文字列を構造化されたGNRMCオブジェクトに解析。- 時刻を抽出(UTCからGMT+8に変換)。
- ステータスをチェック(
A= アクティブ/有効な測位、V= 無効)。 - DDMM.MMMMM形式から緯度/経度を解析 → 十進度。
- 入力された
GNRMCオブジェクトまたは解析に失敗した場合はデフォルトの空のオブジェクトを返す。
-
フォーマットされたGPSデータの表示
print_gps_data(gps)— 以下を含む人間が読みやすいGPS情報を印刷:- ローカル時刻(GMT+8)
- 半球付きの生WGS-84座標
- 変換されたGCJ-02(Google互換)およびBD-09(Baidu互換)座標
- 測位が成功したかどうかを示すステータスメッセージ
-
メインロジック(tryブロック)
- 指定されたパラメータでUARTインターフェースを初期化。
- 座標計算に必要なグローバル定数を定義(
pi、a、ee、x_pi)— 地球楕円体パラメータとスケーリング係数。 - UART経由で受信するGPSデータを継続的に読み取る無限ループに入る。
bufferを使用して完全な行(\nで終わる)が受信されるまで部分的なメッセージを蓄積。- 完全な行が到着したとき:
$GNRMCまたは$PNRMCで始まるかチェック- そうであれば、
parse_gnrmc()を使用して解析 print_gps_data()でフォーマットされた出力を表示
- 例外を処理:
KeyboardInterrupt:Ctrl+Cで正常に終了。- 一般的な
Exception:予期しないエラーをキャッチして印刷。
- 最後に、終了前にUARTリソースをクリーンアップするため
uart.deinit()を呼び出し。
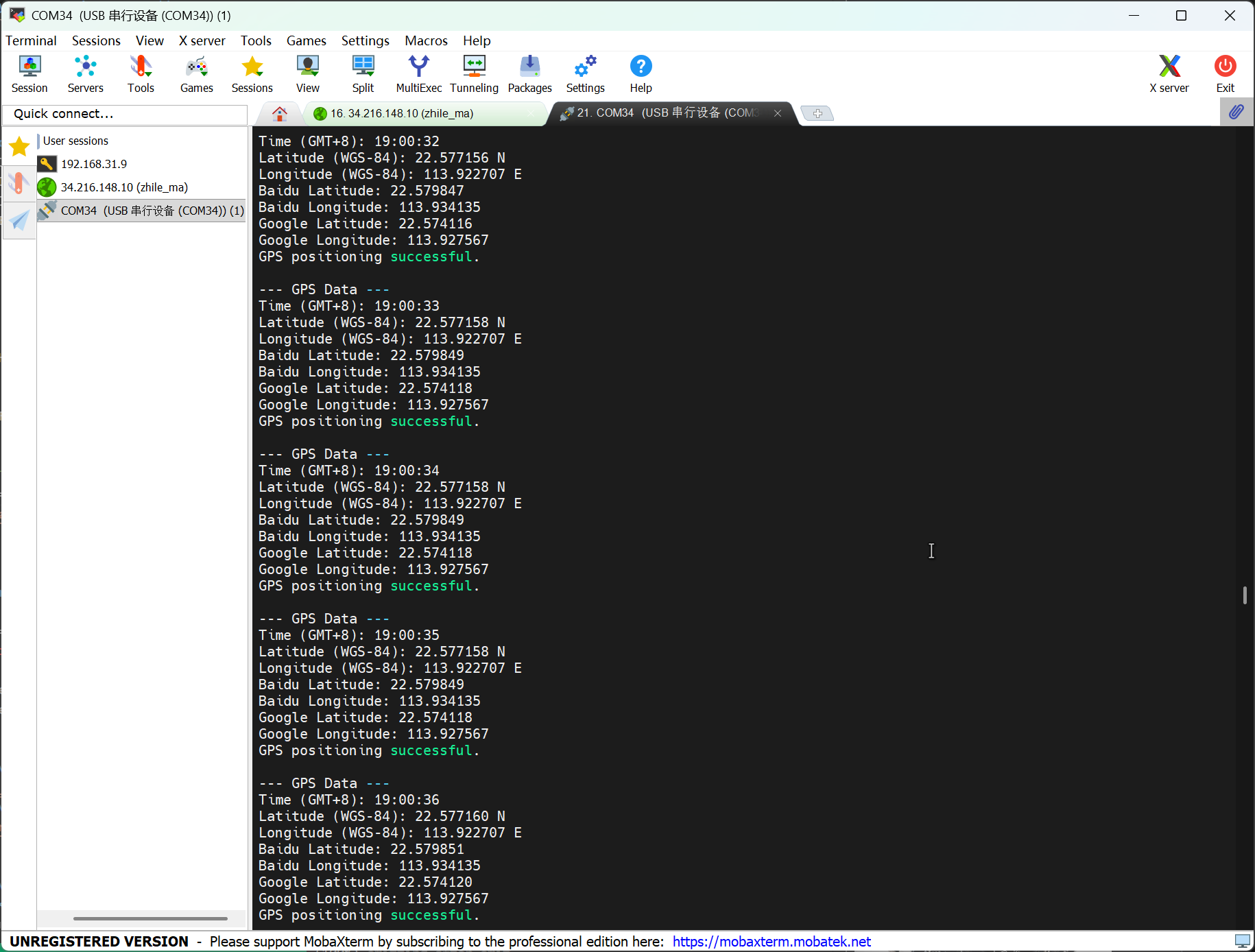
結果グラフ
- 任意のシリアルポートツールを開き、ボーレートを9600に設定します。
- GPSモジュールは屋外の開けた場所で使用する必要があります。
- プログラムはあなたの位置のGPS情報を印刷します。
I2Cの例
XIAO RAM41には、多くのセンサーのデータ送信と解析、およびOLEDスクリーンの使用に利用できるI2Cインターフェースがあります。
ハードウェアの準備
| Seeed Studio XIAO RA4M1 | Seeed Studio Expansion Base for XIAO with Grove OLED |
|---|---|
|  |
ソフトウェア
- i2c.pyという名前の新しいファイルを作成し、参考コードをコピーしてください。
参考コード
import time
from boards.xiao import XiaoI2C
sda = 4 #D4
scl = 5 #D5
i2c = "i2c0"
frq = 400000
i2c = XiaoI2C(i2c, sda, scl, frq)
# Basic 8x8 font
font_data = {
' ': [0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00],
'D': [0x78,0x44,0x42,0x42,0x42,0x44,0x78,0x00],
'E': [0x7C,0x40,0x40,0x78,0x40,0x40,0x7C,0x00],
'H': [0x44,0x44,0x44,0x7C,0x44,0x44,0x44,0x00],
'L': [0x40,0x40,0x40,0x40,0x40,0x40,0x7C,0x00],
'O': [0x3C,0x42,0x42,0x42,0x42,0x42,0x3C,0x00],
'R': [0x7C,0x42,0x42,0x7C,0x48,0x44,0x42,0x00],
'W': [0x42,0x42,0x42,0x42,0x5A,0x66,0x42,0x00],
}
# Write a single command byte to SSD1306 via I2C
def ssd1306_write_command(cmd):
i2c.writeto(0x3C, bytes([0x00, cmd]))
# Write multiple command bytes to SSD1306 via I2C
def ssd1306_write_commands(cmds):
data = bytearray([0x00] + list(cmds))
i2c.writeto(0x3C, data)
# Write display data bytes to SSD1306 via I2C
def ssd1306_write_data(data):
buffer = bytearray(len(data) + 1)
buffer[0] = 0x40
buffer[1:] = data
i2c.writeto(0x3C, buffer)
# Clear the entire SSD1306 display
def ssd1306_clear():
ssd1306_write_commands(bytearray([0x21, 0, 127]))
ssd1306_write_commands(bytearray([0x22, 0, 7]))
empty_data = bytearray(128)
for _ in range(8):
ssd1306_write_data(empty_data)
ssd1306_write_commands([0x21, 0, 127])
# Initialize SSD1306 display with recommended settings
def ssd1306_init():
commands = [
bytearray([0xAE]),
bytearray([0xD5, 0x80]),
bytearray([0xA8, 63]),
bytearray([0xD3, 0x00]),
bytearray([0x40]),
bytearray([0x8D, 0x14]),
bytearray([0x20, 0x00]),
bytearray([0xA1]),
bytearray([0xC8]),
bytearray([0xDA, 0x12]),
bytearray([0x81, 0xCF]),
bytearray([0xD9, 0xF1]),
bytearray([0xDB, 0x40]),
bytearray([0xA4]),
bytearray([0xA6]),
bytearray([0xAF])
]
for cmd in commands:
ssd1306_write_commands(cmd)
ssd1306_clear()
print("SSD1306 initialized successfully")
ssd1306_write_commands([0x21, 0, 127])
# Draw a string of text at specified column and page (row) on SSD1306
def ssd1306_draw_text(text, x, y):
ssd1306_write_commands(bytearray([0x21, x, x + len(text) * 8 - 1]))
ssd1306_write_commands(bytearray([0x22, y, y + 0]))
display_data = bytearray()
for char in text:
font_bytes = font_data.get(char.upper(), font_data[' '])
for col in range(7, -1, -1):
val = 0
for row in range(8):
if font_bytes[row] & (1 << col):
val |= (1 << row)
display_data.append(val)
ssd1306_write_data(display_data)
try:
i2c_addr = i2c.scan()
if 0x3C not in i2c_addr:
raise Exception("SSD1306 not found on I2C bus")
else:
print("SSD1306 found on I2C bus: 0x3C")
# Initialize display
ssd1306_init()
ssd1306_draw_text("HELLO WORLD", 20, 4)
while True:
time.sleep(1)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
コードの説明:
-
モジュールのインポート
time:プログラムの一時停止と遅延を処理する標準timeモジュールをインポート(ここではwhileループのスリープに使用)。XiaoI2C:XIAO開発ボードの低レベル通信プロトコルを処理するboards.xiaoからハードウェア固有のI2Cクラスをインポート。
-
I2C設定の定義
sda = 4、scl = 5:I2Cデータ(SDA)とクロック(SCL)ラインをそれぞれデジタルピンD4とD5に割り当て。 -i2c = "i2c0":マイクロコントローラ上の特定のハードウェアI2C周辺バス(バス0)を選択。frq = 400000:通信速度を400 kHz(ファストモード)に設定し、高速な画面更新を可能にする。i2c = XiaoI2C(...):定義されたピン配置と周波数設定でI2Cオブジェクトをインスタンス化。
-
フォントデータの定義
font_data:ルックアップテーブルとして機能する辞書。文字('H'、'E'など)を8つの16進バイトのリストにマッピング。これらのバイトは8x8グリッドでのその文字のピクセルのビットマスクを表現。
-
ヘルパー関数(低レベルドライバー)
ssd1306_write_command(cmd):ディスプレイに単一の制御命令を送信。バイトに0x00を前置し、SSD1306コントローラに続くバイトがピクセルデータではなくコマンドであることを伝える。ssd1306_write_commands(cmds):オーバーヘッドを最小化するため、単一のI2Cトランザクションで一連のセットアップコマンドを効率的に送信。ssd1306_write_data(data): グラフィックデータを画面RAMに送信します。データの前に0x40を付けて、続くバイトが点灯させるピクセルを表すことを示します。
-
ヘルパー関数(高レベル制御)
ssd1306_clear(): 画面の内容を消去します。列アドレス(0-127)とページアドレス(0-7)を設定して画面全体をカバーし、すべてのメモリ位置にゼロ(空白ピクセル)を書き込みます。ssd1306_init(): OLEDパネルの電圧、スキャン方向、アドレッシングモードを設定してから電源を入れるために、厳密な16進コードシーケンス(例:ディスプレイオフの0xAE、チャージポンプ有効化の0x8D 0x14)を送信します。ssd1306_draw_text(text, x, y): コアグラフィック関数です。- コマンド
0x21(列アドレス)と0x22(ページアドレス)を使用して画面上の描画ウィンドウを設定します。 - 入力文字列を反復処理し、フォントバイトを取得し、ビット演算(
val |= (1 << row))を実行してSSD1306の特定のメモリ構造に合わせてデータを転置/回転します。
-
メインロジック(実行フロー)
i2c.scan(): I2Cバスに接続されたすべてのデバイスを検出して、配線が正しいことを確認します。- アドレス検証: ディスプレイがアドレス
0x3Cに存在するかチェックします。見つからない場合はエラーを発生させて実行を停止し、そうでなければ確認メッセージを出力します。 ssd1306_init(): ディスプレイを起動し、設定を適用します。ssd1306_draw_text("HELLO WORLD", 20, 4): ページ4(画面の中央左付近)のピクセル列20から始まる位置に「HELLO WORLD」テキストをレンダリングします。while True: 1秒間隔でスリープを繰り返す無限ループに入り、プログラムを実行し続けてディスプレイをアクティブに保ちます。try...except: メインロジックをエラーハンドラーでラップして、問題(ハードウェアの欠如など)やユーザー割り込み(Ctrl+C)をキャッチし、読みやすいメッセージでプログラムが正常に終了することを保証します。
結果グラフ
- プログラムが実行を開始すると、画面にHELLO WORLDが表示されます。

まとめ
おめでとうございます!上記のチュートリアルを完了することで、XIAO RA4M1とMicroPythonを使った基本的な開発とデバッグの能力を習得しました。これらの基礎スキルに基づいて、より興味深いプロジェクトを作成されることを楽しみにしています。
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。