Getting started with SO-ARM100 and SO-ARM101 robotic arm with LeRobot
Introduction
The SO-10xARM is a fully open-source robotic arm project launched by TheRobotStudio. It includes the follower arm and the leader robotic arm, and also provides detailed 3D printing files and operation guides. LeRobot is committed to providing models, datasets and tools for real-world robotics in PyTorch. Its aim is to reduce the entry barrier of robotics, enabling everyone to contribute and benefit from sharing datasets and pretrained models. LeRobot integrates cutting-edge methodologies validated for real-world application, centering on imitation learning. It has furnished a suite of pre-trained models, datasets featuring human-gathered demonstrations, and simulation environments, enabling users to commence without the necessity of robot assembly. In the forthcoming weeks, the intention is to augment support for real-world robotics on the most cost-effective and competent robots presently accessible.
Projects Introduction
The SO-ARM10x and reComputer Jetson AI intelligent robot kit seamlessly combine high-precision robotic arm control with a powerful AI computing platform, providing a comprehensive robot development solution. This kit is based on the Jetson Orin or AGX Orin platform, combined with the SO-ARM10x robotic arm and the LeRobot AI framework, offering users an intelligent robot system applicable to multiple scenarios such as education, research, and industrial automation. This wiki provides the assembly and debugging tutorial for the SO ARM10x and realizes data collection and training within the Lerobot framework.

Main Features
- Open-source and low-cost: It is an open-source, low-cost robotic arm solution from TheRobotStudio
- Integration with LeRobot: Designed for integration with LeRobot platform
- Abundant learning resources: Provides comprehensive open-source learning resources like assembly and calibration guides, and tutorials for testing, data collection, training and deployment to assist users in quickly getting started and developing robotic applications.
- Compatible with Nvidia: Deploy this arm kit with reComputer Mini J4012 Orin NX 16 GB.
- Multi-Scene Application: It is applicable to fields such as education, scientific research, automated production, and robotics, helping users achieve efficient and precise robot operations in various complex tasks.
What's news:
- Wiring optimization: Compared to SO-ARM100, SO-ARM101 features improved wiring that prevents disconnection issues previously seen at joint 3. The new wiring design also no longer limits the range of motion of the joints.
- Different gear ratios for the leader arm: The leader arm now uses motors with optimized gear ratios, improving performance and eliminating the need for external gearboxes.
- New functionality support: The leader arm can now follow the follower arm in real-time, which is crucial for the upcoming learning policy, where a human can intervene and correct the robot’s actions.
Seeed Studio is only responsible for the quality of the hardware itself. The tutorials are strictly updated in accordance with the official documentation. If you encounter software issues or environment dependency problems that cannot be resolved, in addition to checking the FAQ section at the end of this tutorial, please promptly report the issue to the LeRobot platform or the LeRobot Discord channel.
Specification
| Type | SO-ARM100 | SO-ARM101 | ||
|---|---|---|---|---|
| Arm Kit | Arm Kit Pro | Arm Kit | Arm Kit Pro | |
| Leader Arm | 12x ST-3215- C001 (7.4V) motors with 1:345 gear ratio for all joints | 12x ST-3215-C018/ST-3215-C047 (12V) motors with 1:345 gear ratio for all joints | 1x ST-3215- C001 (7.4V) motor with 1:345 gear ratio for joint 2 only | |
| Follower Arm | Same as SO-ARM100 | |||
| Power Supply | 5.5 mm × 2.1 mm DC 5 V 4 A | 5.5 mm × 2.1 mm DC 12 V 2 A | 5.5 mm × 2.1 mm DC 5 V 4 A | 5.5 mm × 2.1 mm DC 12 V 2 A (Follower Arm) |
| Angle Sensor | 12-bit magnetic encoder | |||
| Recommended Operating Temperature | 0 °C to 40 °C | |||
| Communication | UART | |||
| Control Method | PC | |||
If you purchase the Arm Kit version, both power supplies are 5V. If you purchase the Arm Kit Pro version, please use the 5V power supply for the calibration and every step of the Leader robotic arm, and the 12V power supply for the calibration and every step of the Follower robotic arm.
Bill of Materials(BOM)
| Part | Amount | Included |
|---|---|---|
| Servo Motos | 12 | ✅ |
| Motor Control Board | 2 | ✅ |
| USB-C Cable 2 pcs | 1 | ✅ |
| Power Supply2 | 2 | ✅ |
| Table Clamp | 4 | ✅ |
| 3D printed parts of the arm | 1 | Option |
Initial System Environment
For Ubuntu x86:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6+
For Jetson Orin:
- Jetson JetPack 6.0 and 6.1, not support 6.1
- Python 3.10
- Torch 2.3+
Table of Contents
3D Printing Guide
Following the official update of SO101, SO100 will no longer support it and the source files will be deleted as per the official, but the source files can still be found in our Makerworld. However, for users who have previously purchased SO100, the tutorials and installation methods remain compatible. The print of SO101 is fully compatible with the motor kit installation of SO100.
Step 1: Choose a printer
The STL files provided are ready to print on many FDM printers. Below are the tested and suggested settings though others may work.
- Material: PLA+
- Nozzle Diameter and Precision: 0.4mm nozzle diameter at 0.2mm layer height or 0.6mm nozzle at 0.4mm layer height.
- Infill Density: 15%
Step 2: Set up the printer
- Ensure that the printer is calibrated and the bed level is correctly set using the printer specific instructions.
- Clean the print bed, making sure it is free from dust, or grease. If cleaning the bed using water, or other liquid, dry the bed.
- If your printer recommends it, use a standard glue stick and apply a thin, even layer of glue across the print area of the bed. Avoid clumping or uneven application.
- Load the printer filament using printer specific instructions.
- Ensure the printer settings match the ones suggested above (most printers have multiple settings so choose the ones that most closely match).
- Set for supports everywhere but ignore slopes greater than 45 degrees to the horizontal.
- There should be no supports in the screw holes with horizontal axes.
Step 3: Print the parts
All the parts for the leader or follower are for easy 3D printing already contained in a single file, correctly orientated for z upwards to minimize supports.
-
For printer bed sizes of 220mmx220mm (such as the Ender), print these files:
-
For printer bed sizes of 205mm x 250mm (such as the Prusa/Up):
Install LeRobot
Environments such as pytorch and torchvision need to be installed based on your CUDA.
- Install Miniconda: For Jetson:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
Or, For X86 Ubuntu 22.04:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
- Create and activate a fresh conda environment for lerobot
conda create -y -n lerobot python=3.10 && conda activate lerobot
- Clone Lerobot:
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
- When using miniconda, install ffmpeg in your environment:
conda install ffmpeg -c conda-forge
This usually installs ffmpeg 7.X for your platform compiled with the libsvtav1 encoder. If libsvtav1 is not supported (check supported encoders with ffmpeg -encoders), you can:
- [On any platform] Explicitly install ffmpeg 7.X using:
conda install ffmpeg=7.1.1 -c conda-forge
- [On Linux only] Install ffmpeg build dependencies and compile ffmpeg from source with libsvtav1, and make sure you use the corresponding ffmpeg binary to your install with which ffmpeg.
If you encounter an error like this, you can use this command too.
- Install LeRobot with dependencies for the feetech motors:
cd ~/lerobot && pip install -e ".[feetech]"
For Jetson Jetpack 6.0+ devices (please make sure to install Pytorch-gpu and Torchvision from step 5 before executing this step):
conda install -y -c conda-forge "opencv>=4.10.0.84" # Install OpenCV and other dependencies through conda, this step is only for Jetson Jetpack 6.0+
conda remove opencv # Uninstall OpenCV
pip3 install opencv-python==4.10.0.84 # Then install opencv-python via pip3
conda install -y -c conda-forge ffmpeg
conda uninstall numpy
pip3 install numpy==1.26.0 # This should match torchvision
- Check Pytorch and Torchvision
Since installing the lerobot environment via pip will uninstall the original Pytorch and Torchvision and install the CPU versions of Pytorch and Torchvision, you need to perform a check in Python.
import torch
print(torch.cuda.is_available())
If the printed result is False, you need to reinstall Pytorch and Torchvision according to the official website tutorial.
If you are using a Jetson device, install Pytorch and Torchvision according to this tutorial.
Configure the motors
- SO101
The servo calibration and initialization process for SO-ARM101 is the same as that of SO-ARM100 in terms of both method and code. However, please note that the gear ratios for the first three joints of the SO-ARM101 Leader Arm differ from those of SO-ARM100, so it’s important to distinguish and calibrate them carefully.
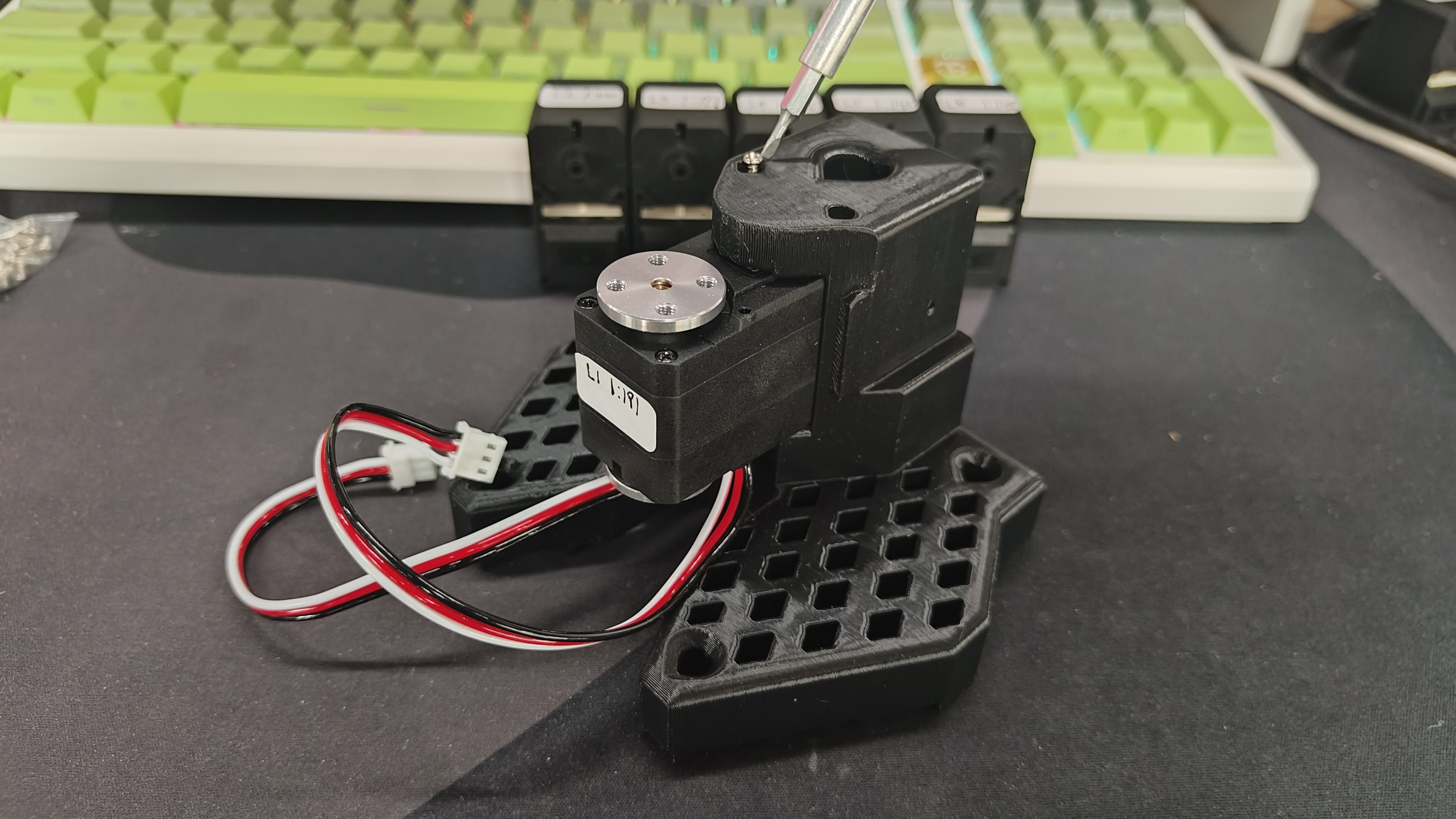
To configure the motors designate one bus servo adapter and 6 motors for your leader arm, and similarly the other bus servo adapter and 6 motors for the follower arm. It's convenient to label them and write on each motor if it's for the follower F or for the leader L and it's ID from 1 to 6. We use F1–F6 to represent joints 1 to 6 of the Follower Arm, and L1–L6 to represent joints 1 to 6 of the Leader Arm. The corresponding servo model, joint assignments, and gear ratio details are as follows:
| Servo Model | Gear Ratio | Corresponding Joints |
|---|---|---|
| ST-3215-C044(7.4V) | 1:191 | L1 |
| ST-3215-C001(7.4V) | 1:345 | L2 |
| ST-3215-C044(7.4V) | 1:191 | L3 |
| ST-3215-C046(7.4V) | 1:147 | L4–L6 |
| ST-3215-C001(7.4V) / C018(12V) / C047(12V) | 1:345 | F1–F6 |
You now should plug the 5V or 12V power supply to the motor bus. 5V for the STS3215 7.4V motors and 12V for the STS3215 12V motors. Note that the leader arm always uses the 7.4V motors, so watch out that you plug in the right power supply if you have 12V and 7.4V motors, otherwise you might burn your motors! Now, connect the motor bus to your computer via USB. Note that the USB doesn't provide any power, and both the power supply and USB have to be plugged in.

The following are the code calibration steps, please calibrate with the reference wiring servo in the picture above
Find USB ports associated to your arms To find the correct ports for each arm, run the utility script twice:
lerobot-find-port
Example output:
Finding all available ports for the MotorBus.
['/dev/ttyACM0', '/dev/ttyACM1']
Remove the usb cable from your MotorsBus and press Enter when done.
[...Disconnect corresponding leader or follower arm and press Enter...]
The port of this MotorsBus is /dev/ttyACM1
Reconnect the USB cable.
Remember to remove the usb, otherwise the interface will not be detected.
Example output when identifying the follower arm's port (e.g., /dev/tty.usbmodem575E0031751 on Mac, or possibly /dev/ttyACM0 on Linux):
Example output when identifying the leader arm's port (e.g., /dev/tty.usbmodem575E0032081, or possibly /dev/ttyACM1 on Linux):
You might need to give access to the USB ports by running:
sudo chmod 666 /dev/ttyACM0
sudo chmod 666 /dev/ttyACM1
Configure your motors
Please use a 5V power supply for calibrating Leader motors (ST-3215-C046, C044, 001).
| Leader Arm Joint 6 Calibration | Leader Arm Joint 5 Calibration | Leader Arm Joint 4 Calibration | Leader Arm Joint 3 Calibration | Leader Arm Joint 2 Calibration | Leader Arm Joint 1 Calibration |
|---|---|---|---|---|---|
 |  |  |  |  |  |
If you buy the Arm Kit version (ST-3215-C001), use a 5V power supply. If you buy the Arm Kit Pro version, please use a 12V power supply to calibrate the servo (ST-3215-C047/ST-3215-C018).
| Follower Arm Joint 6 Calibration | Follower Arm Joint 5 Calibration | Follower Arm Joint 4 Calibration | Follower Arm Joint 3 Calibration | Follower Arm Joint 2 Calibration | Follower Arm Joint 1 Calibration |
|---|---|---|---|---|---|
 |  |  |  |  |  |
Again, please make sure that the servo joint IDs and gear ratios strictly correspond to those of the SO-ARM101.
Connect the usb cable from your computer and the power supply to the follower arm’s controller board. Then, run the following command.
lerobot-setup-motors \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 # <- paste here the port found at previous step
You should see the following instruction.
Connect the controller board to the 'gripper' motor only and press enter.
As instructed, plug the gripper’s motor. Make sure it’s the only motor connected to the board, and that the motor itself is not yet daisy-chained to any other motor. As you press [Enter], the script will automatically set the id and baudrate for that motor.
You should then see the following message:
'gripper' motor id set to 6
Followed by the next instruction:
Connect the controller board to the 'wrist_roll' motor only and press enter.
You can disconnect the 3-pin cable from the controller board, but you can leave it connected to the gripper motor on the other end, as it will already be in the right place. Now, plug in another 3-pin cable to the wrist roll motor and connect it to the controller board. As with the previous motor, make sure it is the only motor connected to the board and that the motor itself isn’t connected to any other one.
Repeat the operation for each motor as instructed.
Check your cabling at each step before pressing Enter. For instance, the power supply cable might disconnect as you manipulate the board.
When you are done, the script will simply finish, at which point the motors are ready to be used. You can now plug the 3-pin cable from each motor to the next one, and the cable from the first motor (the ‘shoulder pan’ with id=1) to the controller board, which can now be attached to the base of the arm.
Do the same steps for the leader arm.
lerobot-setup-motors \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM0 # <- paste here the port found at previous step
Assembly
- The dual-arm assembly process of SO-ARM101 is the same as that of SO-ARM100. The only differences are the addition of cable clips on SO-ARM101 and the different gear ratios of the joint servos on the Leader Arm. So both SO100 and SO101 can be installed by referring to the following content
- Before assembly, please check your motor model and reduction ratio again. If you have purchased SO100, you can ignore this step. If you have purchased SO101, please check the following table to distinguish F1 to F6 and L1 to L6.
| Servo Model | Gear Ratio | Corresponding Joints |
|---|---|---|
| ST-3215-C044(7.4V) | 1:191 | L1 |
| ST-3215-C001(7.4V) | 1:345 | L2 |
| ST-3215-C044(7.4V) | 1:191 | L3 |
| ST-3215-C046(7.4V) | 1:147 | L4–L6 |
| ST-3215-C001(7.4V) / C018(12V) / C047(12V) | 1:345 | F1–F6 |
If you purchased the SO101 Arm Kit Standard Edition, all power supplies are 5V. If you purchased the SO101 Arm Kit Pro Edition, the Leader Arm should be calibrated and operated at every step using a 5V power supply, while the Follower Arm should be calibrated and operated at every step using a 12V power supply.
Assemble Leader Arm
| Step 1 | Step 2 | Step 3 | Step 4 | Step 5 | Step 6 |
|---|---|---|---|---|---|
 |  |  |  |  |  |
| Step 7 | Step 8 | Step 9 | Step 10 | Step 11 | Step 12 |
 |  |  |  |  |  |
| Step 13 | Step 14 | Step 15 | Step 16 | Step 17 | Step 18 |
 |  |  |  |  |  |
| Step 19 | Step 20 | ||||
 |  |
Assemble Follower Arm
- The steps for assembling the Follower Arm are generally the same as those for the Leader Arm. The only difference lies in the installation method of the end-effector (gripper and handle) after Step 12.
| Step 1 | Step 2 | Step 3 | Step 4 | Step 5 | Step 6 |
|---|---|---|---|---|---|
 |  |  |  |  |  |
| Step 7 | Step 8 | Step 9 | Step 10 | Step 11 | Step 12 |
 |  |  |  |  |  |
| Step 13 | Step 14 | Step 15 | Step 16 | Step 17 | |
 |  |  |  |  |
Calibrate
The SO100 and SO101 codes are compatible. Users of SO100 can directly utilize SO101's parameters and code for operation.
If you purchased the SO101 Arm Kit Standard Edition, all power supplies are 5V. If you purchased the SO101 Arm Kit Pro Edition, the Leader Arm should be calibrated and operated at every step using a 5V power supply, while the Follower Arm should be calibrated and operated at every step using a 12V power supply.
Next, you need to connect the power supply and data cable to your SO-10x robot for calibration to ensure that the leader and follower arms have the same position values when they are in the same physical position. This calibration is essential because it allows a neural network trained on one SO-10x robot to work on another. If you need to recalibrate the robotic arm, delete the files under ~/.cache/huggingface/lerobot/calibration/robots or ~/.cache/huggingface/lerobot/calibration/teleoperators and recalibrate the robotic arm. Otherwise, an error prompt will appear. The calibration information for the robotic arm will be stored in the JSON files under this directory.
Manual calibration of follower arm
Please connect the interfaces of the 6 robot servos via a 3-pin cable and connect the chassis servo to the servo drive plate, then run the following command or API example to calibrate the robot arm:
Interface permissions are given first
sudo chmod 666 /dev/ttyACM*
Then calibrate the follower arm
lerobot-calibrate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \# <- The port of your robot
--robot.id=my_awesome_follower_arm # <- Give the robot a unique name
The video below shows how to perform the calibration. First you need to move the robot to the position where all joints are in the middle of their ranges. Then after pressing enter you have to move each joint through its full range of motion.
Manual calibration of leader arm
Do the same steps to calibrate the leader arm, run the following command or API example:
lerobot-calibrate \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \# <- The port of your robot
--teleop.id=my_awesome_leader_arm # <- Give the robot a unique name
Teleoperate
Simple teleop Then you are ready to teleoperate your robot! Run this simple script (it won't connect and display the cameras):
Note that the id associated with a robot is used to store the calibration file. It’s important to use the same id when teleoperating, recording, and evaluating when using the same setup.
sudo chmod 666 /dev/ttyACM*
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm
The teleoperate command will automatically:
- Identify any missing calibrations and initiate the calibration procedure.
- Connect the robot and teleop device and start teleoperation.
Add cameras
If using the Orbbec Gemini2 Depth Camera

- 🚀 Step 1: Install the Orbbec SDK Dependent Environment
-
Clone the
pyorbbecrepositorycd ~/
git clone https://github.com/orbbec/pyorbbecsdk.git -
Download and install the corresponding .whl file for the SDK
Go to pyorbbecsdk Releases,
select and install based on your Python version. For example:pip install pyorbbecsdk-x.x.x-cp310-cp310-linux_x86_64.whl -
Install dependencies in the
pyorbbecdirectorycd ~/pyorbbecsdk
pip install -r requirements.txtForce downgrade the
numpyversion to1.26.0pip install numpy==1.26.0
Red error messages can be ignored.
- Clone the Orbbec SDK into the
~/lerobot/src/camerasdirectory
cd ~/lerobot/src/cameras
git clone https://github.com/ZhuYaoHui1998/orbbec.git
- Modify utils.py and init.py
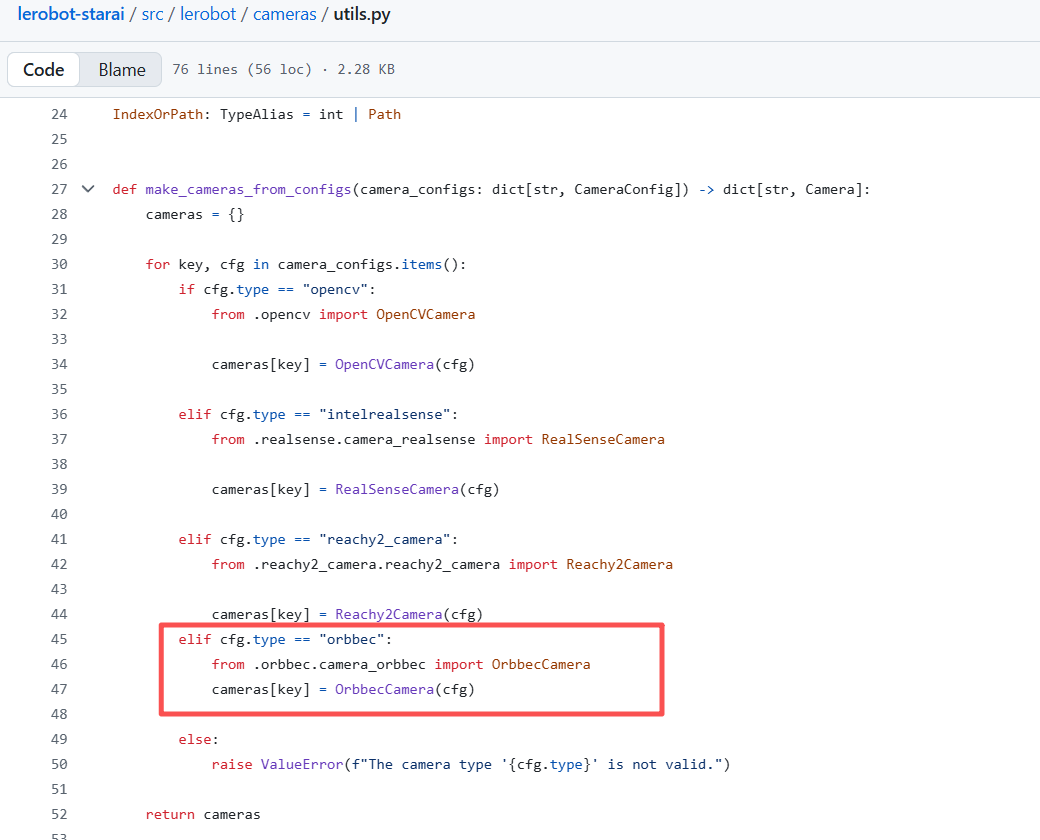
- Find
utils.pyin the~/lerobot/src/lerobot/camerasdirectory, and add the following code at line 40:
elif cfg.type == "orbbec":
from .orbbec.camera_orbbec import OrbbecCamera
cameras[key] = OrbbecCamera(cfg)
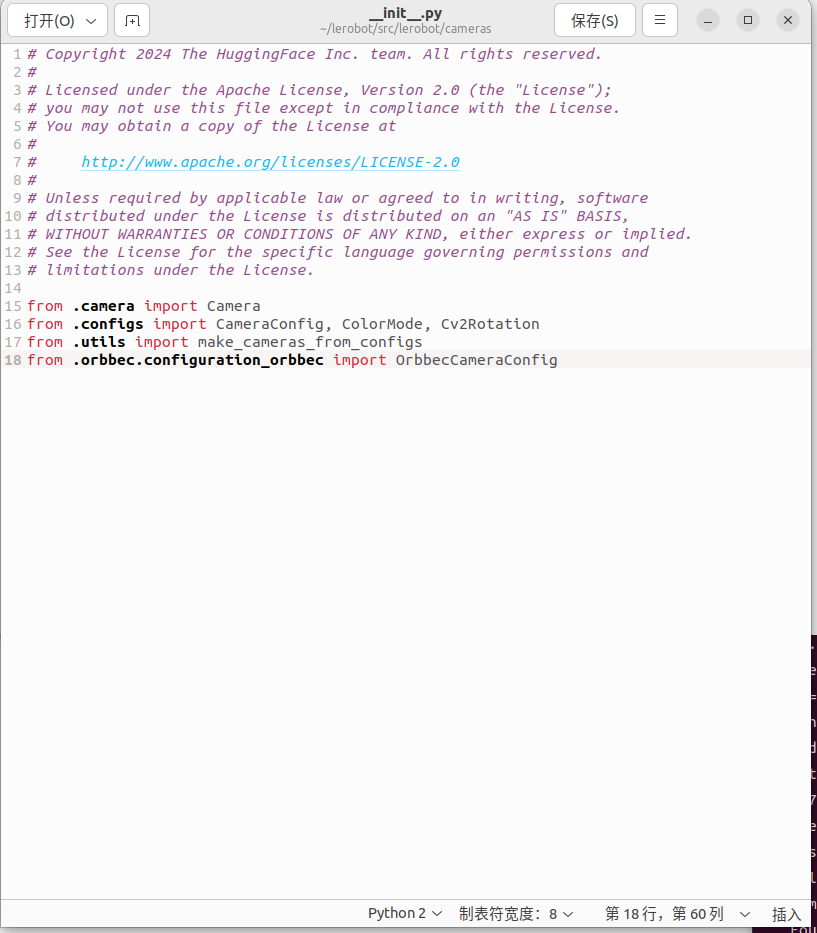
- Find
__init__.pyin the~/lerobot/src/lerobot/camerasdirectory, and add the following code at line 18:
from .orbbec.configuration_orbbec import OrbbecCameraConfig
- 🚀 Step 2: Function Call and Examples
In all the following examples, replace so101_follower with the actual model of the robotic arm you are using (e.g., so100 / so101).
We have added the focus_area hyperparameter. Since depth data that is too far away is meaningless for the robotic arm (it cannot reach or grasp objects), depth data less than or greater than the focus_area will be displayed in black. The default focus_area is (20, 600).
Currently, the only supported resolution is width: 640, height: 880.
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
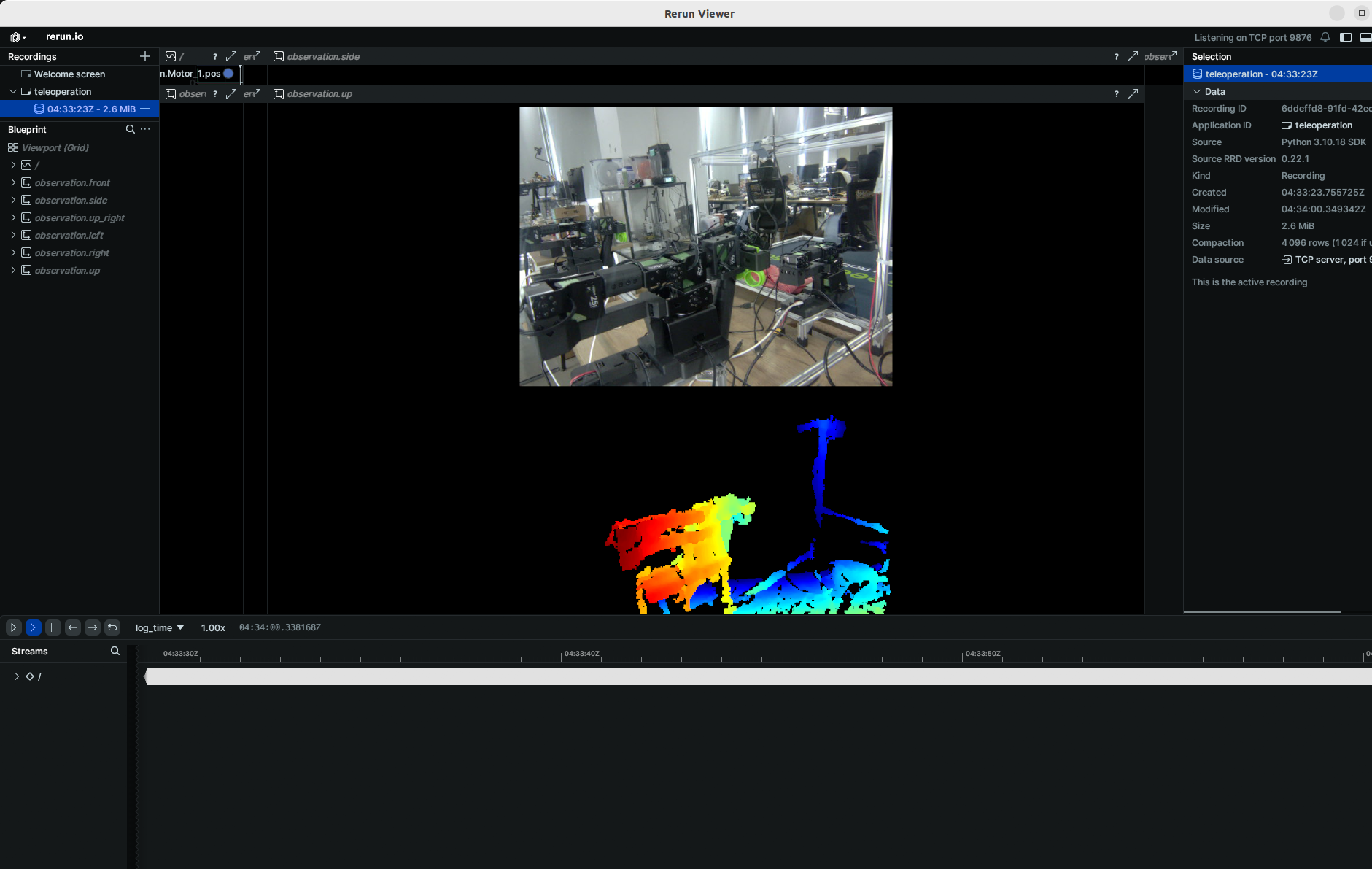
--display_data=true
For subsequent tasks such as data collection, training, and evaluation, the process is the same as that for regular RGB commands. You only need to replace the relevant part in the regular RGB command with:
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
You can also add an additional monocular RGB camera afterward.
The SO100 and SO101 codes are compatible. Users of SO100 can directly utilize SO101's parameters and code for operation.
To instantiate a camera, you need a camera identifier. This identifier might change if you reboot your computer or re-plug your camera, a behavior mostly dependant on your operating system.
To find the camera indices of the cameras plugged into your system, run the following script:
lerobot-find-cameras opencv # or realsense for Intel Realsense cameras
The terminal will print out the following information.
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ 0
Type: OpenCV
Id: 0
Backend api: AVFOUNDATION
Default stream profile:
Format: 16.0
Width: 1920
Height: 1080
Fps: 15.0
--------------------
(more cameras ...)
You can find the pictures taken by each camera in the outputs/captured_images directory.
When using Intel RealSense cameras in , you could get this error: , this can be solved by running the same command with permissions. Note that using RealSense cameras in is unstable.macOSError finding RealSense cameras: failed to set power statesudomacOS.
Then you will be able to display the cameras on your computer while you are teleoperating by running the following code. This is useful to prepare your setup before recording your first dataset.
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
If you have more cameras, you can change --robot.cameras to add cameras. You should note the format of the index_or_path, which is determined by the last digit of the camera ID output by python -m lerobot.find_cameras opencv.
Images in the fourcc: "MJPG" format are compressed. You can try higher resolutions, and you may also attempt the YUYV format. However, the latter will reduce the image resolution and FPS, leading to lag in the robotic arm's operation. Currently, under the MJPG format, it can support 3 cameras at a resolution of 1920*1080 while maintaining 30FPS. That said, connecting 2 cameras to a computer via the same USB HUB is still not recommended.
For example, you want to add a side camera:
lerobot-teleoperate \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true
Images in the fourcc: "MJPG" format are compressed. You can try higher resolutions, and you may also attempt the YUYV format. However, the latter will reduce the image resolution and FPS, leading to lag in the robotic arm's operation. Currently, under the MJPG format, it can support 3 cameras at a resolution of 1920*1080 while maintaining 30FPS. That said, connecting 2 cameras to a computer via the same USB HUB is still not recommended.
If you find bug like this.
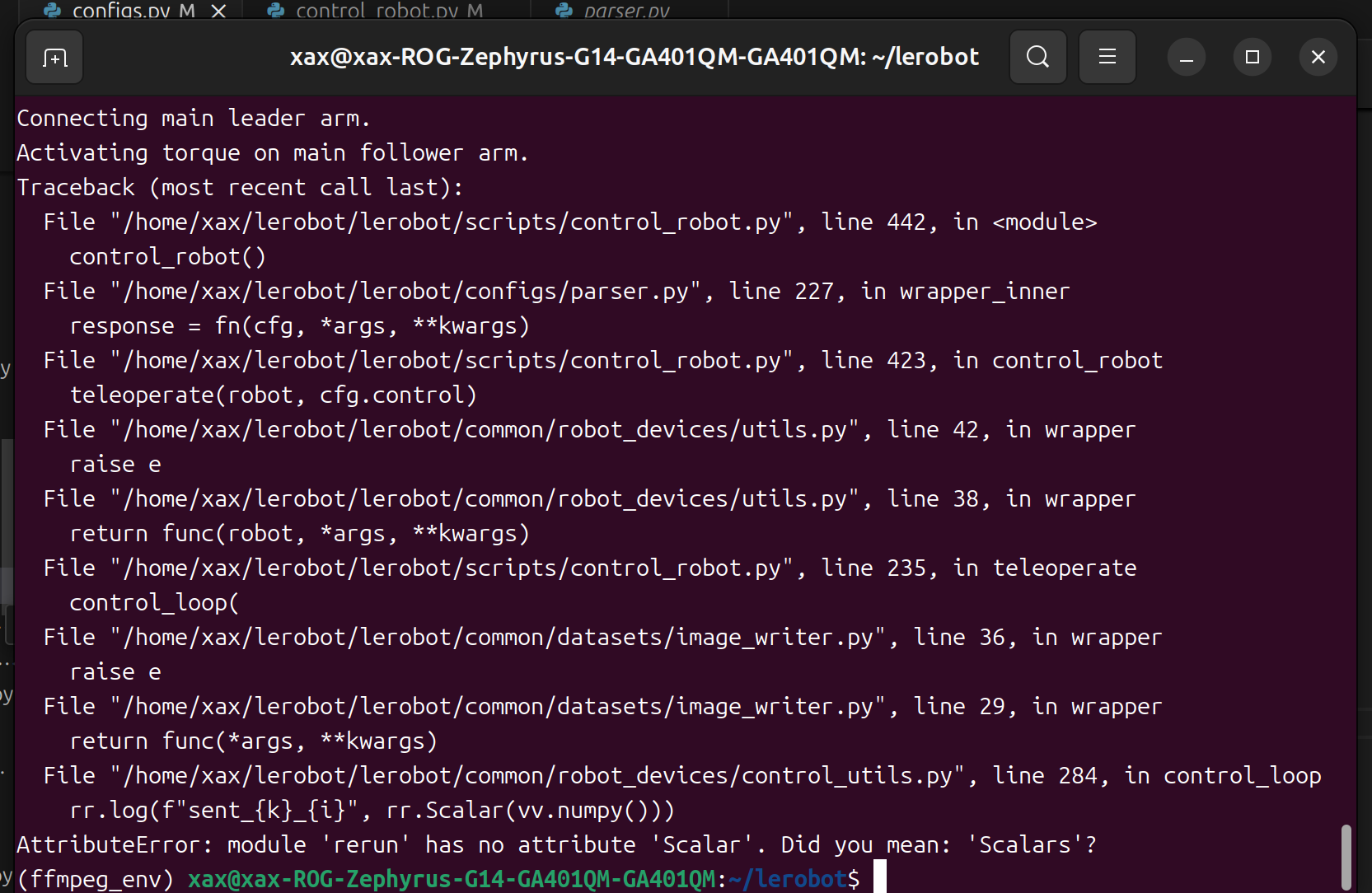
You can downgrade the rerun version to resolve the issue.
pip3 install rerun-sdk==0.23
Record the dataset
- If you want to save the dataset locally, you can run it directly:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true \
--dataset.repo_id=seeedstudio123/test \
--dataset.num_episodes=5 \
--dataset.single_task="Grab the black cube" \
--dataset.push_to_hub=false \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30
Among them, repo_id can be modified customarily, and push_to_hub=false. Finally, the dataset will be saved in the ~/.cache/huggingface/lerobot directory in the home folder, where the aforementioned seeedstudio123/test folder will be created.
- If you want to use the Hugging Face hub features for uploading your dataset and you haven't previously done it, make sure you've logged in using a write-access token, which can be generated from the Hugging Face settings:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
Store your Hugging Face repository name in a variable to run these commands:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
Record 5 episodes and upload your dataset to the hub:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=so101_leader \
--teleop.port=/dev/ttyACM1 \
--teleop.id=my_awesome_leader_arm \
--display_data=true \
--dataset.repo_id=${HF_USER}/record-test \
--dataset.num_episodes=5 \
--dataset.single_task="Grab the black cube" \
--dataset.push_to_hub=true \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30
You will see a lot of lines appearing like this one:
INFO 2024-08-10 15:02:58 ol_robot.py:219 dt:33.34 (30.0hz) dtRlead: 5.06 (197.5hz) dtWfoll: 0.25 (3963.7hz) dtRfoll: 6.22 (160.7hz) dtRlaptop: 32.57 (30.7hz) dtRphone: 33.84 (29.5hz)
Record function
The record function provides a suite of tools for capturing and managing data during robot operation.
1. Data Storage
- Data is stored using the
LeRobotDatasetformat and is stored on disk during recording. - By default, the dataset is pushed to your Hugging Face page after recording.
- To disable uploading, use:
--dataset.push_to_hub=False
2. Checkpointing and Resuming
- Checkpoints are automatically created during recording.
- To resume after an interruption, re-run the same command with:
--resume=true
⚠️ Critical Note: When resuming, set --dataset.num_episodes to the number of additional episodes to record (not the targeted total number of episodes in the dataset).
- To start recording from scratch, manually delete the dataset directory.
3. Recording Parameters
Set the flow of data recording using command-line arguments:
| Parameter | Description | Default |
|---|---|---|
| --dataset.episode_time_s | Duration per data episode (seconds) | 60 |
| --dataset.reset_time_s | Environment reset time after each episode (seconds) | 60 |
| --dataset.num_episodes | Total episodes to record | 50 |
4. Keyboard Controls During Recording
Control the data recording flow using keyboard shortcuts:
| Key | Action |
|---|---|
| → (Right Arrow) | Early-stop current episode/reset; move to next. |
| ← (Left Arrow) | Cancel current episode; re-record it. |
| ESC | Stop session immediately, encode videos, and upload dataset. |
If keyboard not work, you may need install other version of pynput.
pip install pynput==1.6.8
Tips for Gathering Data
- Task Suggestion: Grasp objects at different locations and place them in a bin.
- Scale: Record ≥50 episodes (10 episodes per location).
- Consistency:
- Keep cameras fixed.
- Maintain identical grasping behavior.
- Ensure manipulated objects are visible in camera feeds.
- Progression:
- Start with reliable grasping before adding variations (new locations, techniques, camera adjustments).
- Avoid rapid complexity increases to prevent failures.
💡 Rule of Thumb: You should be able to do the task yourself by only looking at the camera images.
If you want to dive deeper into this important topic, you can check out the blog post we wrote on what makes a good dataset.
Troubleshooting
Linux-specific Issue:
If Right Arrow/Left Arrow/ESC keys are unresponsive during recording:
- Verify the
$DISPLAYenvironment variable is set (see pynput limitations).
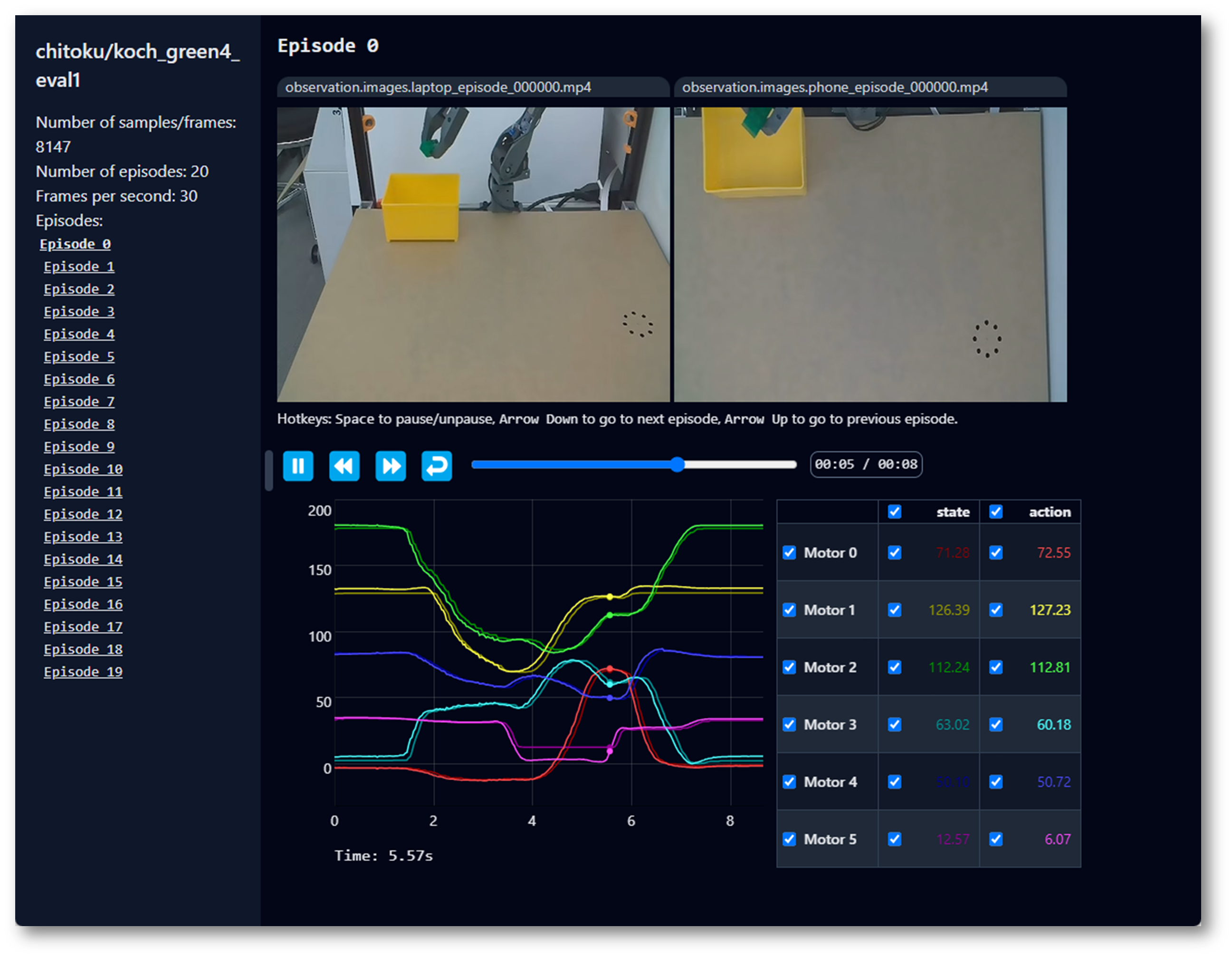
Visualize the dataset
The SO100 and SO101 codes are compatible. Users of SO100 can directly utilize SO101's parameters and code for operation.
If you uploaded your dataset to the hub with --control.push_to_hub=true, you can visualize your dataset online by copy pasting your repo id given by:
echo ${HF_USER}/so101_test
If you didn't upload with --dataset.push_to_hub=false, you can also visualize it locally with:
lerobot-dataset-viz \
--repo-id ${HF_USER}/so101_test \
If you upload with --dataset.push_to_hub=false, you can also visualize it locally with:
lerobot-dataset-viz \
--repo-id seeed_123/so101_test \
Here, seeed_123 is the custom repo_id name defined when collecting data.
Replay an episode
The SO100 and SO101 codes are compatible. Users of SO100 can directly utilize SO101's parameters and code for operation.
A useful feature is the replay function, which allows you to replay any episode that you’ve recorded or episodes from any dataset out there. This function helps you test the repeatability of your robot’s actions and assess transferability across robots of the same model.
You can replay the first episode on your robot with either the command below or with the API example:
lerobot-replay \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--dataset.repo_id=${HF_USER}/record-test \
--dataset.episode=0
Your robot should replicate movements similar to those you recorded.
Train And Evaluate
ACT
Refer toACT
To train a policy to control your robot, use the lerobot-train script.
Train
lerobot-train \
--dataset.repo_id=${HF_USER}/so101_test \
--policy.type=act \
--output_dir=outputs/train/act_so101_test \
--job_name=act_so101_test \
--policy.device=cuda \
--wandb.enable=false \
--steps=300000
If you want to train on a local dataset, make sure the repo_id matches the one used during data collection and add --policy.push_to_hub=False.
lerobot-train \
--dataset.repo_id=seeedstudio123/test \
--policy.type=act \
--output_dir=outputs/train/act_so101_test \
--job_name=act_so101_test \
--policy.device=cuda \
--wandb.enable=false \
--policy.push_to_hub=false\
--steps=300000
Let's explain it:
- Dataset specification: We provide the dataset via the parameter
--dataset.repo_id=${HF_USER}/so101_test. - Training steps: We modify the number of training steps using
--steps=300000. The algorithm defaults to 800000 steps, and you can adjust it based on the difficulty of your task and by observing the loss during training. - Policy type: We provide the policy with
policy.type=act. Similarly, you can switch between policies such as [act,diffusion,pi0,pi0fast,pi0fast,sac,smolvla]., which will load the configuration fromconfiguration_act.py. Importantly, this policy will automatically adapt to your robot's (e.g.,laptopandphone) motor states, motor actions, and the number of cameras, as this information is already stored in your dataset. - Device selection: We provide
policy.device=cudabecause we are training on an Nvidia GPU, but you can usepolicy.device=mpsfor training on Apple Silicon. - Visualization tool: We provide
wandb.enable=trueto visualize training charts using Weights and Biases. This is optional, but if you use it, ensure you have logged in by runningwandb login.
Evaluate
The SO100 and SO101 codes are compatible. Users of SO100 can directly utilize SO101's parameters and code for operation.
You can use the record function from lerobot/record.py but with a policy checkpoint as input. For instance, run this command to record 10 evaluation episodes:
lerobot-record \
--robot.type=so100_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video10, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: intelrealsense, serial_number_or_name: 233522074606, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=${HF_USER}/eval_so100 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=${HF_USER}/my_policy
such as:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_so101_test/checkpoints/last/pretrained_model
-
The
--policy.pathparameter indicates the path to the weight file of your policy training results (e.g.,outputs/train/act_so101_test/checkpoints/last/pretrained_model). If you upload the model training result weight file to Hub, you can also use the model repository (e.g.,${HF_USER}/act_so100_test). -
The dataset name
dataset.repo_idstarts witheval_. This operation will separately record videos and data during evaluation, which will be saved in the folder starting witheval_, such asseeed/eval_test123. -
If you encounter
File exists: 'home/xxxx/.cache/huggingface/lerobot/xxxxx/seeed/eval_xxxx'during the evaluation phase, please delete the folder starting witheval_first and then run the program again. -
When encountering
mean is infinity. You should either initialize with stats as an argument or use a pretrained model, please note that keywords like front and side in the--robot.camerasparameter must be strictly consistent with those used when collecting the dataset.
SmolVLA
SmolVLA is Hugging Face’s lightweight foundation model for robotics. Designed for easy fine-tuning on LeRobot datasets, it helps accelerate your development!
Set Up Your Environment
Install SmolVLA dependencies by running:
pip install -e ".[smolvla]"
Finetune SmolVLA on your data
Use smolvla_base, our pretrained 450M model, and fine-tune it on your data. Training the model for 20k steps will roughly take ~4 hrs on a single A100 GPU. You should tune the number of steps based on performance and your use-case.
If you don’t have a gpu device, you can train using our notebook on Google Colab.
Pass your dataset to the training script using --dataset.repo_id. If you want to test your installation, run the following command where we use one of the datasets we collected for the SmolVLA Paper.
lerobot-train \
--policy.path=lerobot/smolvla_base \
--dataset.repo_id=${HF_USER}/mydataset \
--batch_size=64 \
--steps=20000 \
--output_dir=outputs/train/my_smolvla \
--job_name=my_smolvla_training \
--policy.device=cuda \
--wandb.enable=true
You can start with a small batch size and increase it incrementally, if the GPU allows it, as long as loading times remain short.
Fine-tuning is an art. For a complete overview of the options for finetuning, run
lerobot-train --help
Evaluate the finetuned model and run it in real-time
Similarly for when recording an episode, it is recommended that you are logged in to the HuggingFace Hub. You can follow the corresponding steps: Record a dataset. Once you are logged in, you can run inference in your setup by doing:
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \ # <- Use your port
--robot.id=my_blue_follower_arm \ # <- Use your robot id
--robot.cameras="{ front: {type: opencv, index_or_path: 8, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \ # <- Use your cameras
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--dataset.repo_id=${HF_USER}/eval_DATASET_NAME_test \ # <- This will be the dataset name on HF Hub
--dataset.episode_time_s=50 \
--dataset.num_episodes=10 \
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=so100_leader \
# --teleop.port=/dev/ttyACM0 \
# --teleop.id=my_red_leader_arm \
--policy.path=HF_USER/FINETUNE_MODEL_NAME # <- Use your fine-tuned model
Depending on your evaluation setup, you can configure the duration and the number of episodes to record for your evaluation suite.
LIBERO
LIBERO is a benchmark designed to study lifelong robot learning. The idea is that robots won’t just be pretrained once in a factory, they’ll need to keep learning and adapting with their human users over time. This ongoing adaptation is called lifelong learning in decision making (LLDM), and it’s a key step toward building robots that become truly personalized helpers.
Evaluating with LIBERO
At LeRobot, we ported LIBERO into our framework and used it mainly to evaluate SmolVLA, our lightweight Vision-Language-Action model.
LIBERO is now part of our multi-eval supported simulation, meaning you can benchmark your policies either on a single suite of tasks or across multiple suites at once with just a flag.
To Install LIBERO, after following LeRobot official instructions, just do: pip install -e ".[libero]"
Single-suite evaluation
Evaluate a policy on one LIBERO suite:
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object \
--eval.batch_size=2 \
--eval.n_episodes=3
--env.taskpicks the suite (libero_object,libero_spatial, etc.).--eval.batch_sizecontrols how many environments run in parallel.--eval.n_episodessets how many episodes to run in total.
Multi-suite evaluation
Benchmark a policy across multiple suites at once:
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object,libero_spatial \
--eval.batch_size=1 \
--eval.n_episodes=2
- Pass a comma-separated list to
--env.taskfor multi-suite evaluation.
Example training command
lerobot-train \
--policy.type=smolvla \
--policy.repo_id=${HF_USER}/libero-test \
--dataset.repo_id=HuggingFaceVLA/libero \
--env.type=libero \
--env.task=libero_10 \
--output_dir=./outputs/ \
--steps=100000 \
--batch_size=4 \
--eval.batch_size=1 \
--eval.n_episodes=1 \
--eval_freq=1000 \
Note on rendering
LeRobot uses MuJoCo for simulation. You need to set the rendering backend before training or evaluation:
export MUJOCO_GL=egl→ for headless servers (e.g. HPC, cloud)
Pi0
Refer to Pi0
pip install -e ".[pi]"
Train
lerobot-train \
--policy.type=pi0 \
--dataset.repo_id=seeed/eval_test123 \
--job_name=pi0_training \
--output_dir=outputs/pi0_training \
--policy.pretrained_path=lerobot/pi0_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--policy.dtype=bfloat16 \
--steps=20000 \
--policy.device=cuda \
--batch_size=32 \
--wandb.enable=false
Evaluate
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30,fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/pi0_training/checkpoints/last/pretrained_model
Pi0.5
Refer to Pi0.5
pip install -e ".[pi]"
Train
lerobot-train \
--dataset.repo_id=seeed/eval_test123 \
--policy.type=pi05 \
--output_dir=outputs/pi05_training \
--job_name=pi05_training \
--policy.pretrained_path=lerobot/pi05_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--wandb.enable=false \
--policy.dtype=bfloat16 \
--steps=3000 \
--policy.device=cuda \
--batch_size=32
Evaluate
lerobot-record \
--robot.type=so101_follower \
--robot.port=/dev/ttyACM0 \
--robot.cameras="{ front: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30, fourcc: "MJPG"}, side: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30,fourcc: "MJPG"}}" \
--robot.id=my_awesome_follower_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/pi05_training/checkpoints/last/pretrained_model
GR00T N1.5
Refet to GR00T N1.5
If you encounter the following error:
Try running the following command to resolve it:
pip install datasets==2.19
Training should take several hours. You will find checkpoints in outputs/train/act_so100_test/checkpoints.
To resume training from a checkpoint, below is an example command to resume from last checkpoint of the act_so101_test policy:
lerobot-train \
--config_path=outputs/train/act_so101_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true
Upload policy checkpoints
Once training is done, upload the latest checkpoint with:
huggingface-cli upload ${HF_USER}/act_so101_test \
outputs/train/act_so101_test/checkpoints/last/pretrained_model
You can also upload intermediate checkpoints with:
CKPT=010000
huggingface-cli upload ${HF_USER}/act_so101_test${CKPT} \
outputs/train/act_so101_test/checkpoints/${CKPT}/pretrained_model
FAQ
-
If you are following this documentation/tutorial, please git clone the recommended GitHub repository
https://github.com/Seeed-Projects/lerobot.git. The repository recommended in this documentation is a verified stable version; the official Lerobot repository is continuously updated to the latest version, which may cause unforeseen issues such as different dataset versions, different commands, etc. -
If you encounter the following error when calibrating servo IDs:
`Motor ‘gripper’ was not found, Make sure it is connected`Please carefully check whether the communication cable is properly connected to the servo and whether the power supply is providing the correct voltage.
-
If you encounter:
Could not connect on port "/dev/ttyACM0"And you can see ACM0 exists when running
ls /dev/ttyACM*, it means you forgot to grant serial port permissions. Entersudo chmod 666 /dev/ttyACM*in the terminal to fix it. -
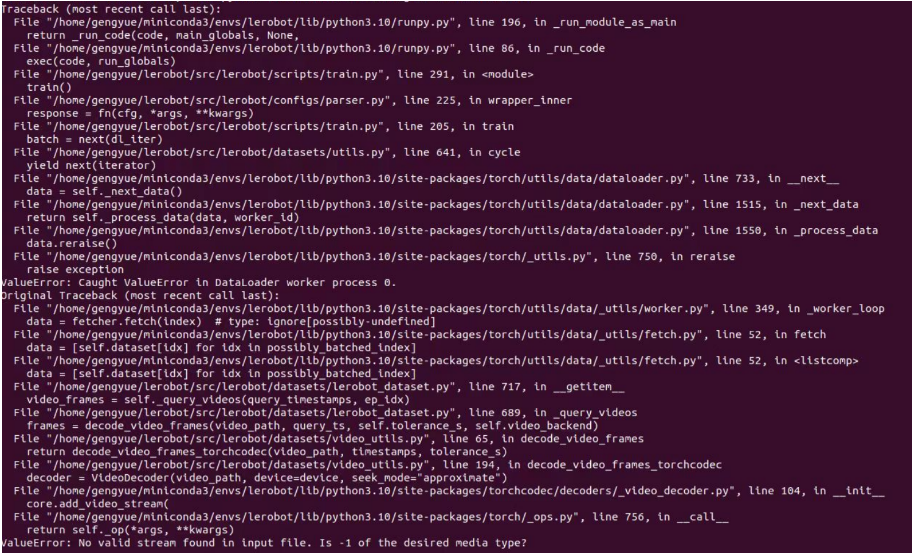
If you encounter:
No valid stream found in input file. Is -1 of the desired media type?Please install ffmpeg 7.1.1 using
conda install ffmpeg=7.1.1 -c conda-forge.
-
If you encounter:
ConnectionError: Failed to sync read 'Present_Position' on ids=[1,2,3,4,5,6] after 1 tries. [TxRxResult] There is no status packet!You need to check whether the robotic arm on the corresponding port is powered on, and whether the data cables of the bus servos are loose or disconnected. If a servo's light is not on, it means the cable of the previous servo is loose.
-
If you encounter the following error when calibrating the robotic arm:
Magnitude 30841 exceeds 2047 (max for sign_bit_index=11)Power off and restart the robotic arm, then try calibrating again. This method can also be used if the MAX angle reaches a value of tens of thousands during calibration. If this doesn't work, you need to recalibrate the corresponding servos, including median calibration and ID writing.
-
If you encounter during the evaluation phase:
File exists: 'home/xxxx/.cache/huggingface/lerobot/xxxxx/seeed/eval_xxxx'Please delete the folder starting with
eval_first and then run the program again. -
If you encounter during the evaluation phase:
`mean` is infinity. You should either initialize with `stats` as an argument or use a pretrained modelPlease note that keywords like "front" and "side" in the
--robot.camerasparameter must be strictly consistent with those used when collecting the dataset. -
If you have repaired or replaced parts of the robotic arm, please completely delete the files under
~/.cache/huggingface/lerobot/calibration/robotsor~/.cache/huggingface/lerobot/calibration/teleoperatorsand recalibrate the robotic arm. Otherwise, error messages may appear, as calibration information is stored in JSON files in these directories. -
Training ACT on 50 sets of data takes approximately 6 hours on a laptop with an RTX 3060 (8GB), and about 2-3 hours on computers with RTX 4090 or A100 GPUs.
-
During data collection, ensure the camera position, angle, and ambient lighting are stable. Reduce the amount of unstable background and pedestrians captured by the camera, as excessive changes in the deployment environment may cause the robotic arm to fail to grasp properly.
-
For the data collection command, ensure the
num-episodesparameter is set to collect sufficient data. Do not manually pause midway, as the mean and variance of the data are calculated only after data collection is complete, which are necessary for training. -
If the program indicates it cannot read image data from the USB camera, ensure the USB camera is not connected through a hub. The USB camera must be directly connected to the device to ensure fast image transmission speed.
-
If you find bug like
AttributeError: module 'rerun' has no attribute 'scalar'. Did you mean: 'scalars'?, You can downgrade the rerun version to resolve the issue.
pip3 install rerun-sdk==0.23
If you encounter software issues or environment dependency problems that cannot be resolved, in addition to checking the FAQ section at the end of this tutorial, please promptly report the issue to the LeRobot platform or the LeRobot Discord channel.
Citation
TheRobotStudio Project: SO-ARM10x
Huggingface Project: Lerobot
Dnsty: Jetson Containers
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.