ORB-SLAM3 with Orbbec Gemini2

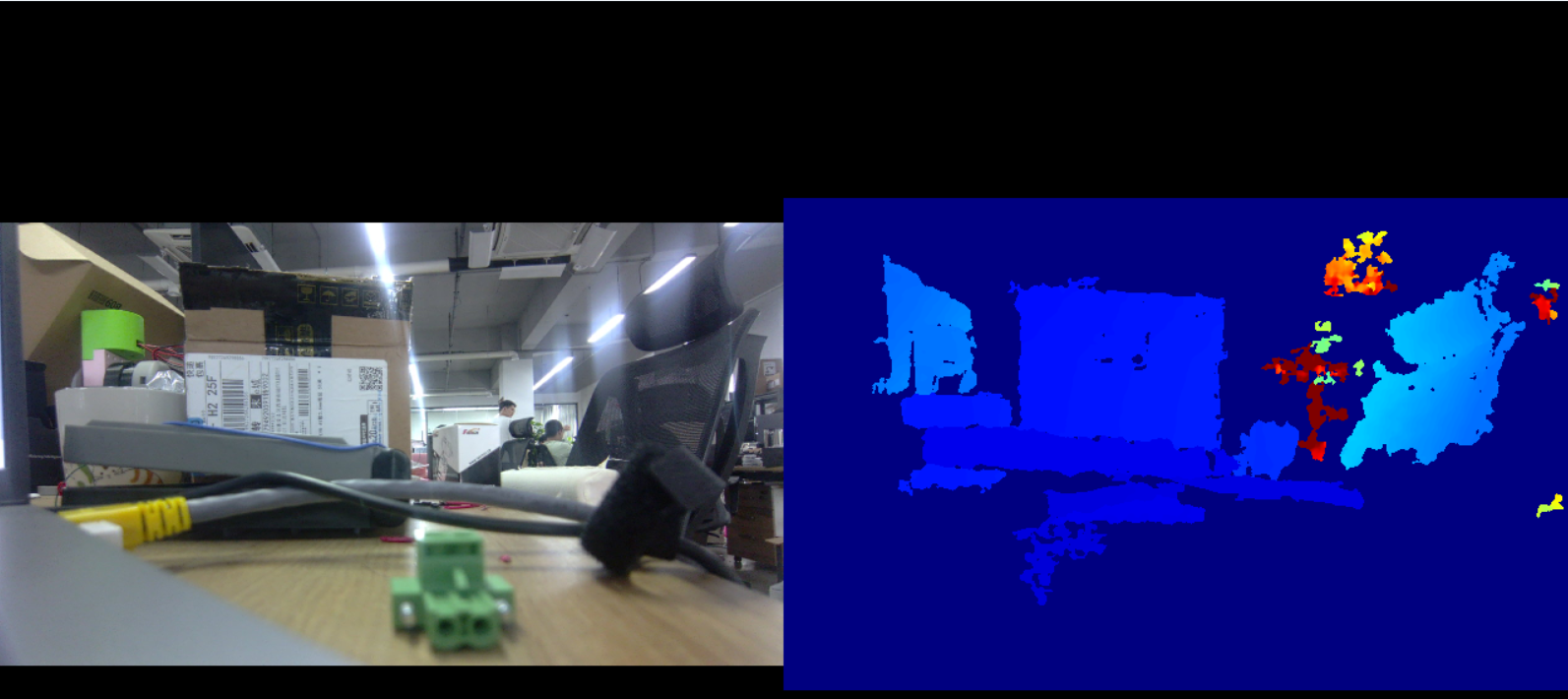
The Orbbec Gemini 2 is a high-performance RGB-D camera featuring a dual-eye structured light depth sensor and an integrated 6-axis IMU. It provides fully synchronized RGB and depth data streams, ensuring precise real-time Depth-to-Color alignment, which is essential for accurate 3D perception. This combination of features makes the Gemini 2 ideal for robotics, computer vision, and other 3D applications, enabling tasks such as object detection, mapping, navigation, and spatial analysis with high reliability and accuracy. The camera is compact, easy to set up, and fully supported by the Orbbec SDK, making it suitable for both research and industrial deployments.
Introduction
ORB-SLAM3 is an advanced visual SLAM algorithm for monocular, stereo, and RGB-D cameras. It uses ORB features for robust tracking and mapping, supports loop closure and relocalization, and delivers high accuracy and efficiency for robotics, AR/VR, and autonomous navigation.This wiki provides comprehensive steps to set up and run ORB-SLAM3 on reComputer Jetson Series using an Orbbec Gemini2 RGB-D camera for advanced visual SLAM applications.
Prerequisites
- reComputer J30/40 preinstalled Jetpack 6.2
- Orbbec Gemini2 3D Camera
- ROS2 Humble environment installed

Install Orbbec SDK
Step 1. Download and install the Orbbec SDK for ARM64 architecture:
# Download Orbbec SDK
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.11/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
# Unzip the SDK
unzip OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
Step 2. Build examples and test:
# Install udev rules
cd OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64/shared/
sudo chmod +x ./install_udev_rules.sh
sudo ./install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build examples and setup
cd ..
./build_examples.sh
./setup.sh
Building ORB-SLAM3
Step 1. Install System Dependencies:
sudo apt update && sudo apt install -y \
cmake build-essential libeigen3-dev libopencv-dev \
libglew-dev libpython2.7-dev ffmpeg libavcodec-dev \
libavutil-dev libavformat-dev libswscale-dev \
libavdevice-dev libdc1394-22-dev libraw1394-dev \
libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev \
libepoxy-dev python3-dev libboost-serialization-dev
Step 2. Install Pangolin which is required for ORB-SLAM3 visualization:
git clone --recursive https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
git submodule update --init --recursive
# Install prerequisites
./scripts/install_prerequisites.sh recommended
# Remove conflicting packages and install OpenEXR
sudo apt remove libilmbase-dev -y
sudo apt install libopenexr-dev libimath-dev -y
# Build and install
mkdir build && cd build
cmake ..
make -j$(nproc)
sudo make install
If you encounter OpenEXR-related compilation errors, you may need to modify the source code:
In ./components/pango_image/src/image_io_exr.cpp, replace:
#include <ImfChannelList.h>
#include <ImfFrameBuffer.h>
#include <ImfInputFile.h>
#include <ImfOutputFile.h>
with:
#include <OpenEXR/ImfChannelList.h>
#include <OpenEXR/ImfFrameBuffer.h>
#include <OpenEXR/ImfInputFile.h>
#include <OpenEXR/ImfOutputFile.h>
Step 3. Configuration for compiling ORB-SLAM3
cd ~
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
cd ORB_SLAM3
ORB-SLAM3 may have compatibility issues with newer C++ standards. Fix the monotonic_clock issue:
# Replace monotonic_clock with steady_clock in all source files
find Examples -name "*.cc" -exec sed -i 's/monotonic_clock/steady_clock/g' {} \;
For example, in Examples/Stereo/stereo_euroc.cc:
// Change from:
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
// To:
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
Step 4. Test whether Pangolin is installed properly:
./examples/SimpleDisplay/SimpleDisplay
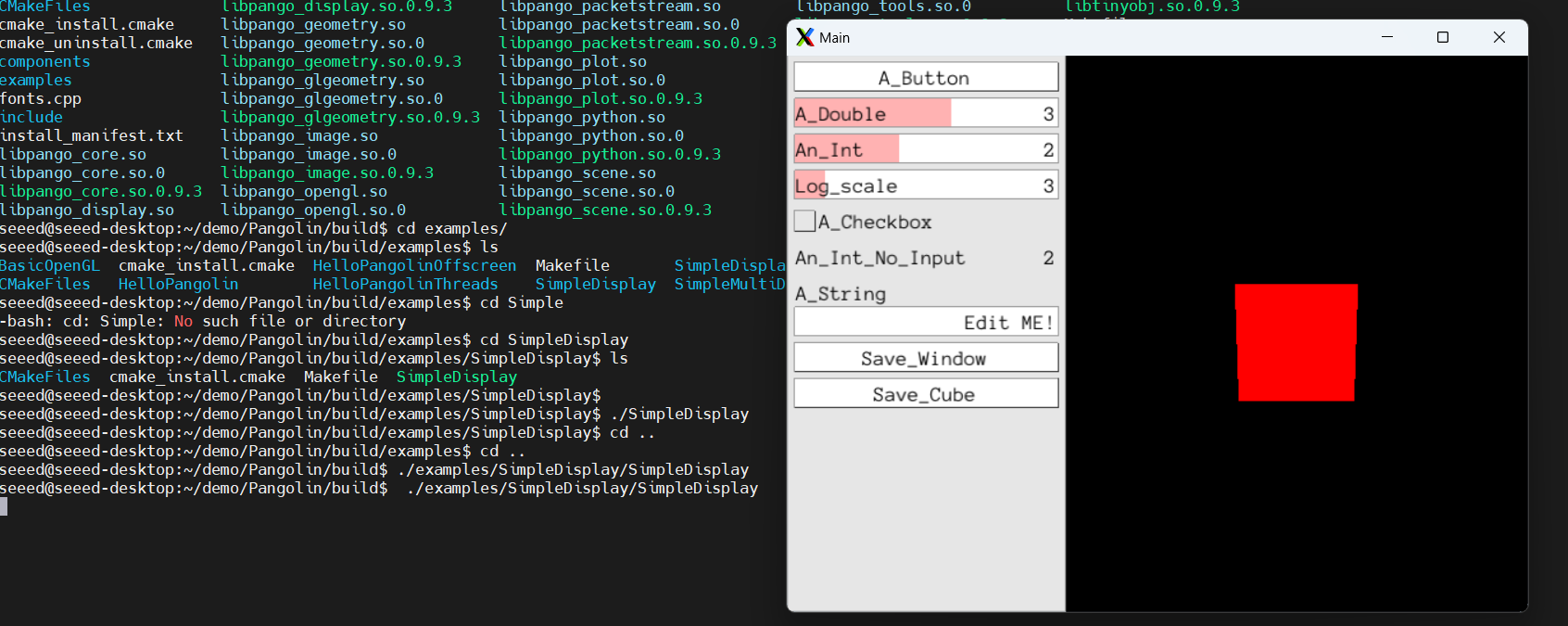
If the installation is done correctly, the window as shown in the above picture can be opened normally.
Step 5. Modify CMakeLists.txt
Modify the CMakeLists.txt file to make the project compatible with the Orbbec SDK.Copy the following complete CMakeList.txt configuration directly:
You need to modify: set(ORBBEC_SDK_PATH "/home/seeed/demo/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64") to the path where you installed your own SDK.
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(ORB_SLAM3)
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -march=native")
set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -march=native")
# Check C++14, C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++14" COMPILER_SUPPORTS_CXX14)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX14)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14")
add_definitions(-DCOMPILEDWITHC14)
message(STATUS "Using flag -std=c++14.")
elseif(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++14/11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 4.4)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()
MESSAGE("OPENCV VERSION:")
MESSAGE(${OpenCV_VERSION})
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
find_package(realsense2)
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${PROJECT_SOURCE_DIR}/include/CameraModels
${PROJECT_SOURCE_DIR}/Thirdparty/Sophus
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
add_library(${PROJECT_NAME} SHARED
src/System.cc
src/Tracking.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/ORBextractor.cc
src/ORBmatcher.cc
src/FrameDrawer.cc
src/Converter.cc
src/MapPoint.cc
src/KeyFrame.cc
src/Atlas.cc
src/Map.cc
src/MapDrawer.cc
src/Optimizer.cc
src/Frame.cc
src/KeyFrameDatabase.cc
src/Sim3Solver.cc
src/Viewer.cc
src/ImuTypes.cc
src/G2oTypes.cc
src/CameraModels/Pinhole.cpp
src/CameraModels/KannalaBrandt8.cpp
src/OptimizableTypes.cpp
src/MLPnPsolver.cpp
src/GeometricTools.cc
src/TwoViewReconstruction.cc
src/Config.cc
src/Settings.cc
include/System.h
include/Tracking.h
include/LocalMapping.h
include/LoopClosing.h
include/ORBextractor.h
include/ORBmatcher.h
include/FrameDrawer.h
include/Converter.h
include/MapPoint.h
include/KeyFrame.h
include/Atlas.h
include/Map.h
include/MapDrawer.h
include/Optimizer.h
include/Frame.h
include/KeyFrameDatabase.h
include/Sim3Solver.h
include/Viewer.h
include/ImuTypes.h
include/G2oTypes.h
include/CameraModels/GeometricCamera.h
include/CameraModels/Pinhole.h
include/CameraModels/KannalaBrandt8.h
include/OptimizableTypes.h
include/MLPnPsolver.h
include/GeometricTools.h
include/TwoViewReconstruction.h
include/SerializationUtils.h
include/Config.h
include/Settings.h)
add_subdirectory(Thirdparty/g2o)
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so
-lboost_serialization
-lcrypto
)
# If RealSense SDK is found the library is added and its examples compiled
if(realsense2_FOUND)
include_directories(${PROJECT_NAME}
${realsense_INCLUDE_DIR}
)
target_link_libraries(${PROJECT_NAME}
${realsense2_LIBRARY}
)
endif()
# Check for Orbbec SDK
# Try to find OrbbecSDK in the local directory first
set(ORBBEC_SDK_PATH "/home/seeed/demo/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64")
if(EXISTS ${ORBBEC_SDK_PATH})
set(ORBBEC_FOUND TRUE)
set(ORBBEC_INCLUDE_DIRS ${ORBBEC_SDK_PATH}/include)
set(ORBBEC_LIBRARIES ${ORBBEC_SDK_PATH}/lib/libOrbbecSDK.so)
message(STATUS "Orbbec SDK found at: ${ORBBEC_SDK_PATH}")
message(STATUS "Orbbec SDK include dirs: ${ORBBEC_INCLUDE_DIRS}")
message(STATUS "Orbbec SDK library: ${ORBBEC_LIBRARIES}")
else()
# Fallback to pkg-config
find_package(PkgConfig)
if(PkgConfig_FOUND)
pkg_check_modules(ORBBEC ob_api)
if(ORBBEC_FOUND)
message(STATUS "Orbbec SDK found via pkg-config: ${ORBBEC_VERSION}")
endif()
endif()
endif()
if(ORBBEC_FOUND)
include_directories(${PROJECT_NAME}
${ORBBEC_INCLUDE_DIRS}
)
target_link_libraries(${PROJECT_NAME}
${ORBBEC_LIBRARIES}
)
else()
message(WARNING "Orbbec SDK not found. Orbbec examples will not be compiled.")
endif()
# Build examples
# RGB-D examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D)
add_executable(rgbd_tum
Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(rgbd_realsense_D435i
Examples/RGB-D/rgbd_realsense_D435i.cc)
target_link_libraries(rgbd_realsense_D435i ${PROJECT_NAME})
endif()
if(ORBBEC_FOUND)
add_executable(rgbd_orbbec_gemini2
Examples/RGB-D/rgbd_orbbec_gemini2_cpp.cc)
target_link_libraries(rgbd_orbbec_gemini2 ${PROJECT_NAME})
endif()
# RGB-D inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D-Inertial)
if(realsense2_FOUND)
add_executable(rgbd_inertial_realsense_D435i
Examples/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
target_link_libraries(rgbd_inertial_realsense_D435i ${PROJECT_NAME})
endif()
# Stereo examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo)
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
add_executable(stereo_euroc
Examples/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc ${PROJECT_NAME})
add_executable(stereo_tum_vi
Examples/Stereo/stereo_tum_vi.cc)
target_link_libraries(stereo_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_realsense_t265
Examples/Stereo/stereo_realsense_t265.cc)
target_link_libraries(stereo_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_realsense_D435i
Examples/Stereo/stereo_realsense_D435i.cc)
target_link_libraries(stereo_realsense_D435i ${PROJECT_NAME})
endif()
# Monocular examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular)
add_executable(mono_tum
Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum ${PROJECT_NAME})
add_executable(mono_kitti
Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti ${PROJECT_NAME})
add_executable(mono_euroc
Examples/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc ${PROJECT_NAME})
add_executable(mono_tum_vi
Examples/Monocular/mono_tum_vi.cc)
target_link_libraries(mono_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_realsense_t265
Examples/Monocular/mono_realsense_t265.cc)
target_link_libraries(mono_realsense_t265 ${PROJECT_NAME})
add_executable(mono_realsense_D435i
Examples/Monocular/mono_realsense_D435i.cc)
target_link_libraries(mono_realsense_D435i ${PROJECT_NAME})
endif()
# Monocular inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular-Inertial)
add_executable(mono_inertial_euroc
Examples/Monocular-Inertial/mono_inertial_euroc.cc)
target_link_libraries(mono_inertial_euroc ${PROJECT_NAME})
add_executable(mono_inertial_tum_vi
Examples/Monocular-Inertial/mono_inertial_tum_vi.cc)
target_link_libraries(mono_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_inertial_realsense_t265
Examples/Monocular-Inertial/mono_inertial_realsense_t265.cc)
target_link_libraries(mono_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(mono_inertial_realsense_D435i
Examples/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
target_link_libraries(mono_inertial_realsense_D435i ${PROJECT_NAME})
endif()
# Stereo Inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo-Inertial)
add_executable(stereo_inertial_euroc
Examples/Stereo-Inertial/stereo_inertial_euroc.cc)
target_link_libraries(stereo_inertial_euroc ${PROJECT_NAME})
add_executable(stereo_inertial_tum_vi
Examples/Stereo-Inertial/stereo_inertial_tum_vi.cc)
target_link_libraries(stereo_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_inertial_realsense_t265
Examples/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
target_link_libraries(stereo_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_inertial_realsense_D435i
Examples/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
target_link_libraries(stereo_inertial_realsense_D435i ${PROJECT_NAME})
endif()
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Calibration)
if(realsense2_FOUND)
add_executable(recorder_realsense_D435i
Examples/Calibration/recorder_realsense_D435i.cc)
target_link_libraries(recorder_realsense_D435i ${PROJECT_NAME})
add_executable(recorder_realsense_T265
Examples/Calibration/recorder_realsense_T265.cc)
target_link_libraries(recorder_realsense_T265 ${PROJECT_NAME})
endif()
# Old examples - DISABLED to avoid compilation issues
# Uncomment the following lines if you need the old examples
# # RGB-D examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D)
#
# add_executable(rgbd_tum_old
# Examples_old/RGB-D/rgbd_tum.cc)
# target_link_libraries(rgbd_tum_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(rgbd_realsense_D435i_old
# Examples_old/RGB-D/rgbd_realsense_D435i.cc)
# target_link_libraries(rgbd_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# # RGB-D inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D-Inertial)
#
# if(realsense2_FOUND)
# add_executable(rgbd_inertial_realsense_D435i_old
# Examples_old/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
# target_link_libraries(rgbd_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Stereo examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo)
#
# add_executable(stereo_kitti_old
# Examples_old/Stereo/stereo_kitti.cc)
# target_link_libraries(stereo_kitti_old ${PROJECT_NAME})
#
# add_executable(stereo_euroc_old
# Examples_old/Stereo/stereo_euroc.cc)
# target_link_libraries(stereo_euroc_old ${PROJECT_NAME})
#
# add_executable(stereo_tum_vi_old
# Examples_old/Stereo/stereo_tum_vi.cc)
# target_link_libraries(stereo_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(stereo_realsense_t265_old
# Examples_old/Stereo/stereo_realsense_t265.cc)
# target_link_libraries(stereo_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_realsense_D435i_old
# Examples_old/Stereo/stereo_realsense_D435i.cc)
# target_link_libraries(stereo_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Monocular examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular)
#
# add_executable(mono_tum_old
# Examples_old/Monocular/mono_tum.cc)
# target_link_libraries(mono_tum_old ${PROJECT_NAME})
#
# add_executable(mono_kitti_old
# Examples_old/Monocular/mono_kitti.cc)
# target_link_libraries(mono_tum_old ${PROJECT_NAME})
#
# add_executable(mono_euroc_old
# Examples_old/Monocular/mono_euroc.cc)
# target_link_libraries(mono_euroc_old ${PROJECT_NAME})
#
# add_executable(mono_tum_vi_old
# Examples_old/Monocular/mono_tum_vi.cc)
# target_link_libraries(mono_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(mono_realsense_t265_old
# Examples_old/Monocular/mono_realsense_t265.cc)
# target_link_libraries(mono_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(mono_realsense_D435i_old
# Examples_old/Monocular/mono_realsense_D435i.cc)
# target_link_libraries(mono_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Monocular inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular-Inertial)
#
# add_executable(mono_inertial_euroc_old
# Examples_old/Monocular-Inertial/mono_inertial_euroc.cc)
# target_link_libraries(mono_inertial_euroc_old ${PROJECT_NAME})
#
# add_executable(mono_inertial_tum_vi_old
# Examples_old/Monocular-Inertial/mono_inertial_tum_vi.cc)
# target_link_libraries(mono_inertial_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(mono_inertial_realsense_t265_old
# Examples_old/Monocular-Inertial/mono_inertial_realsense_t265.cc)
# target_link_libraries(mono_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(mono_inertial_realsense_D435i_old
# Examples_old/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
# target_link_libraries(mono_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Stereo Inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo-Inertial)
#
# add_executable(stereo_inertial_euroc_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
# target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_inertial_tum_vi_old
# Examples_old/Stereo-Inertial/stereo_inertial_tum_vi.cc)
# target_link_libraries(stereo_inertial_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(stereo_inertial_realsense_t265_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
# target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_inertial_realsense_D435i_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
# target_link_libraries(stereo_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
Step 6. Create a script that uses the Orbbec Gemini2 adapter for the ORB-SLAM3 RGB-D mode
Create a file named rgbd_orbbec_gemini2_cpp.cc under the Examples/RGB-D/ directory as follows:
rgbd_orbbec_gemini2_cpp.cc
/**
* This file is part of ORB-SLAM3
*
* Copyright (C) 2017-2021 Carlos Campos, Richard Elvira, Juan J. Gómez Rodríguez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
* Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
*
* ORB-SLAM3 is free software: you can redistribute it and/or modify it under the terms of the GNU General Public
* License as published by the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* ORB-SLAM3 is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the
* implied warranty of MERCHANTABILITY or PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along with ORB-SLAM3.
* If not, see <http://www.gnu.org/licenses/>.
*/
# include <signal.h>
# include <stdlib.h>
# include <iostream>
# include <algorithm>
# include <fstream>
# include <chrono>
# include <ctime>
# include <sstream>
# include <condition_variable>
# include <mutex>
# include <thread>
# include <opencv2/core/core.hpp>
# include <libobsensor/ObSensor.hpp>
# include <libobsensor/h/ObTypes.h>
# include <System.h>
using namespace std;
bool b_continue_session;
void exit_loop_handler(int s){
cout << "Finishing session" << endl;
b_continue_session = false;
}
// Orbbec Gemini 2 camera parameters
const int WIDTH = 640;
const int HEIGHT = 480;
const int FPS = 30;
// Global variables for camera data
cv::Mat imCV, depthCV;
double timestamp_image = -1.0;
bool image_ready = false;
int count_im_buffer = 0;
// Mutex and condition variable for thread synchronization
std::mutex imu_mutex;
std::condition_variable cond_image_rec;
// Orbbec pipeline and config using C++ API
std::shared_ptr<ob::Pipeline> pipeline = nullptr;
std::shared_ptr<ob::Config> config = nullptr;
// Callback function for receiving frames from Orbbec Gemini 2
void orbbec_frame_callback(std::shared_ptr<ob::FrameSet> frameSet) {
std::unique_lock<std::mutex> lock(imu_mutex);
if (frameSet == nullptr) {
return;
}
count_im_buffer++;
// Get current timestamp
double new_timestamp_image = std::chrono::duration_cast<std::chrono::milliseconds>(
std::chrono::system_clock::now().time_since_epoch()).count() * 1e-3;
// Limit frame rate to 15 FPS to reduce processing load
if (abs(timestamp_image - new_timestamp_image) < 0.067) { // 1/15 = 0.067 seconds
count_im_buffer--;
return;
}
try {
// Process color frame
auto colorFrame = frameSet->getFrame(OB_FRAME_COLOR);
if (colorFrame != nullptr) {
auto videoFrame = colorFrame->as<ob::VideoFrame>();
uint32_t width = videoFrame->getWidth();
uint32_t height = videoFrame->getHeight();
OBFormat format = videoFrame->getFormat();
// Convert to OpenCV Mat
if (format == OB_FORMAT_RGB || format == OB_FORMAT_BGR) {
uint8_t* data = (uint8_t*)videoFrame->getData();
imCV = cv::Mat(height, width, CV_8UC3, data);
if (format == OB_FORMAT_RGB) {
cv::cvtColor(imCV, imCV, cv::COLOR_RGB2BGR);
}
// Resize image for better performance (smaller size for faster processing)
cv::resize(imCV, imCV, cv::Size(640, 360));
// Add small delay to prevent overwhelming the system
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
}
// Process depth frame
auto depthFrame = frameSet->getFrame(OB_FRAME_DEPTH);
if (depthFrame != nullptr) {
auto videoFrame = depthFrame->as<ob::VideoFrame>();
uint32_t width = videoFrame->getWidth();
uint32_t height = videoFrame->getHeight();
uint8_t* data = (uint8_t*)videoFrame->getData();
// Convert to OpenCV Mat (depth is 16-bit)
depthCV = cv::Mat(height, width, CV_16U, data);
// Resize depth image for better performance (smaller size for faster processing)
cv::resize(depthCV, depthCV, cv::Size(640, 360));
}
timestamp_image = new_timestamp_image;
image_ready = true;
} catch (const ob::Error& e) {
std::cerr << "Error processing frames: " << e.what() << std::endl;
}
lock.unlock();
cond_image_rec.notify_all();
}
int main(int argc, char **argv)
{
if(argc != 3)
{
cerr << endl << "Usage: ./rgbd_orbbec_gemini2_cpp path_to_vocabulary path_to_settings" << endl;
return 1;
}
// Check if vocabulary file exists
if (strcmp(argv[1], "-") == 0) {
cerr << "Vocabulary file not found." << endl;
exit(-1);
}
// Check if settings file exists
if (strcmp(argv[2], "-") == 0) {
cerr << "Settings file not found." << endl;
exit(-1);
}
try {
// Create pipeline using C++ API
pipeline = std::make_shared<ob::Pipeline>();
cout << "✓ Pipeline created successfully" << endl;
// Get device info
auto device = pipeline->getDevice();
if (device) {
auto deviceInfo = device->getDeviceInfo();
cout << "✓ Device name: " << deviceInfo->getName() << endl;
cout << "✓ Device serial: " << deviceInfo->getSerialNumber() << endl;
}
// Create config
config = std::make_shared<ob::Config>();
// Enable color stream
config->enableVideoStream(OB_STREAM_COLOR, OB_WIDTH_ANY, OB_HEIGHT_ANY, OB_FPS_ANY, OB_FORMAT_RGB);
cout << "✓ Color stream enabled" << endl;
// Enable depth stream
config->enableVideoStream(OB_STREAM_DEPTH, OB_WIDTH_ANY, OB_HEIGHT_ANY, OB_FPS_ANY, OB_FORMAT_Y16);
cout << "✓ Depth stream enabled" << endl;
// Start pipeline with callback
pipeline->start(config, orbbec_frame_callback);
cout << "✓ Orbbec Gemini 2 pipeline started successfully!" << endl;
} catch (const ob::Error& e) {
cerr << "Failed to initialize Orbbec SDK: " << e.what() << endl;
return -1;
} catch (const std::exception& e) {
cerr << "Exception during initialization: " << e.what() << endl;
return -1;
}
// Create SLAM system
ORB_SLAM3::System SLAM(argv[1], argv[2], ORB_SLAM3::System::RGBD, true, 0, "");
float imageScale = SLAM.GetImageScale();
double timestamp;
cv::Mat im, depth;
double t_resize = 0.f;
double t_track = 0.f;
cout << "Starting SLAM system..." << endl;
// Main loop
while (!SLAM.isShutDown())
{
{
std::unique_lock<std::mutex> lk(imu_mutex);
if (!image_ready)
cond_image_rec.wait(lk);
if (count_im_buffer > 1)
cout << count_im_buffer - 1 << " dropped frames\n";
count_im_buffer = 0;
timestamp = timestamp_image;
im = imCV.clone();
depth = depthCV.clone();
image_ready = false;
}
if (imageScale != 1.f)
{
int width = im.cols * imageScale;
int height = im.rows * imageScale;
cv::resize(im, im, cv::Size(width, height));
cv::resize(depth, depth, cv::Size(width, height));
}
// Pass the image to the SLAM system
SLAM.TrackRGBD(im, depth, timestamp);
}
cout << "System shutdown!" << endl;
// Cleanup
if (pipeline) {
pipeline->stop();
cout << "✓ Pipeline stopped" << endl;
}
return 0;
}
Step 7. Build ORB-SLAM3
chmod +x build.sh
./build.sh
Camera Calibration
Before running ORB-SLAM3, it is necessary to calibrate the Camera to obtain the camera's parameter configuration. Here, we demonstrate using the camera calibration tool provided by ROS to calibrate the camera and obtain its parameters.
Step 1. Install Orbbec ROS2 Driver
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone https://github.com/orbbec/OrbbecSDK_ROS2.git
# Install dependencies
sudo apt install libgflags-dev nlohmann-json3-dev \
ros-$ROS_DISTRO-image-transport ros-${ROS_DISTRO}-image-transport-plugins \
ros-${ROS_DISTRO}-compressed-image-transport ros-$ROS_DISTRO-image-publisher \
ros-$ROS_DISTRO-camera-info-manager ros-$ROS_DISTRO-diagnostic-updater \
ros-$ROS_DISTRO-diagnostic-msgs ros-$ROS_DISTRO-statistics-msgs \
ros-$ROS_DISTRO-backward-ros libdw-dev
# Install udev rules
cd ~/ros2_ws/src/OrbbecSDK_ROS2/orbbec_camera/scripts
sudo bash install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build
cd ~/ros2_ws/
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
# Source and launch
source ./install/setup.bash
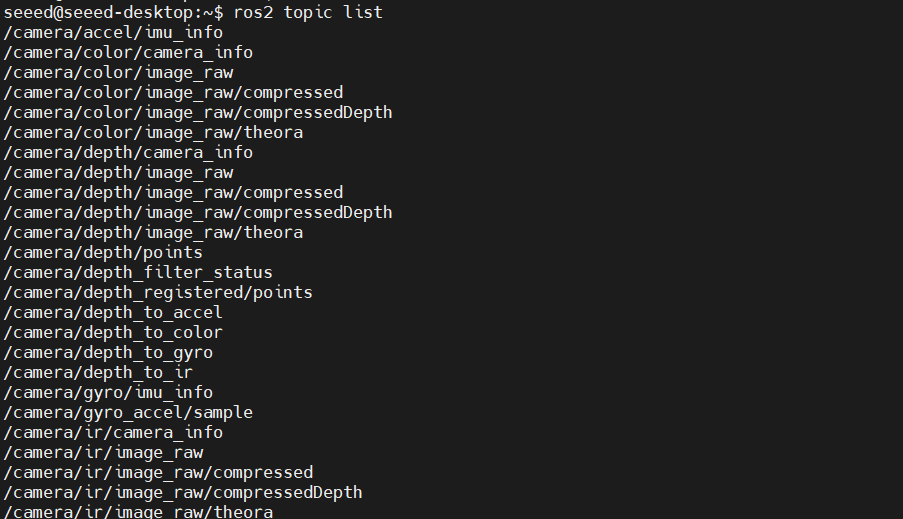
ros2 launch orbbec_camera gemini2.launch.py
You can check whether the camera node can start normally by observing whether the camera data topic is published normally.
Step 2. Install Camera Calibration Package
sudo apt install ros-humble-camera-calibration
Step 3. Download Calibration Checkerboard
Download the calibration checkerboard from Checkerboard Collection and print it out.
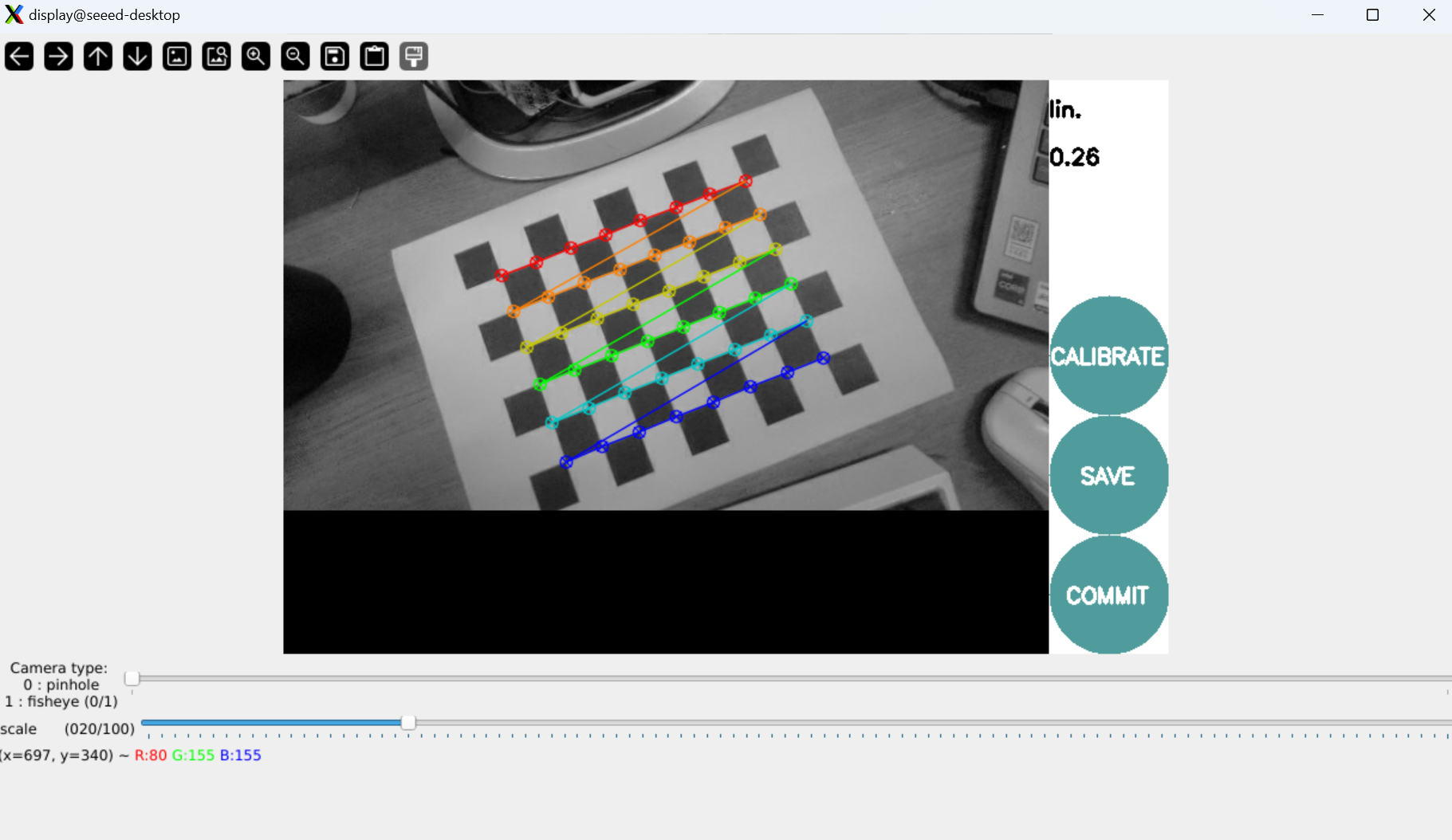
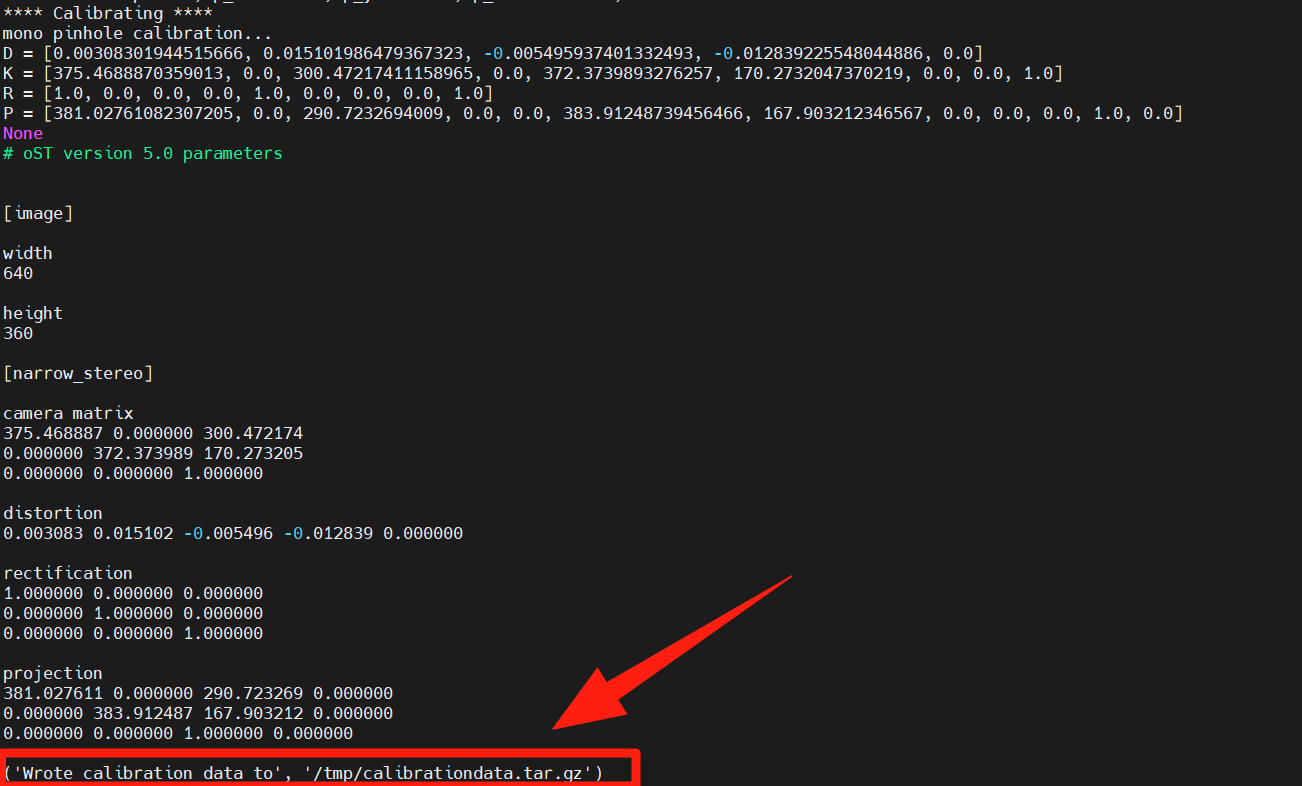
Step 4. Run Camera Calibration
# For 8x6 checkerboard with 25mm squares
ros2 run camera_calibration cameracalibrator --size 8x6 --square 0.025 \
--ros-args --remap image:=/camera/color/image_raw --remap camera:=/camera/color
--size 8x6refers to the number of inner corners (8×6 = 48 corners for a 9×7 grid)--square 0.025refers to the square size in meters (25mm)- Move the camera around to capture images from different angles
Collect images from different angles, automatically calculate the camera parameters, and save the calibration data in a tooltip.
Step 5. Configure the camera YAML file
Create a parameter configuration.yaml file named Orbbec_Gemini2.yaml for the Orbbec Gemini2 camera under the Examples/RGB-D/folder in your ORB-SLAM3 project.
Orbbec_Gemini2.yaml
%YAML:1.0
# --------------------------------------------------------------------------------------------
# Camera Parameters
# --------------------------------------------------------------------------------------------
File.version: "1.0"
Camera.type: "PinHole"
# Camera calibration and distortion parameters
Camera1.fx: 375.46889
Camera1.fy: 372.37399
Camera1.cx: 300.47217
Camera1.cy: 170.2732
# distortion parameters
Camera1.k1: 0.003083
Camera1.k2: 0.015102
Camera1.p1: -0.005496
Camera1.p2: -0.012839
Camera1.k3: 0.0
# Camera resolution
Camera.width: 640
Camera.height: 360
# Camera frames per second
Camera.fps: 30
# Color order of the images (0: BGR, 1: RGB)
Camera.RGB: 1
# Stereo/Depth 参数(如果是单目,可以不用)
Stereo.ThDepth: 40.0
Stereo.b: 0.0745
# Depth map scale
RGBD.DepthMapFactor: 1000.0
# --------------------------------------------------------------------------------------------
# ORB Parameters
# --------------------------------------------------------------------------------------------
ORBextractor.nFeatures: 800
ORBextractor.scaleFactor: 1.2
ORBextractor.nLevels: 6
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
# --------------------------------------------------------------------------------------------
# Viewer Parameters
# --------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1.0
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2.0
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3.0
Viewer.ViewpointX: 0.0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -3.5
Viewer.ViewpointF: 500.0
Running ORB-SLAM3
# Set Library Path
export LD_LIBRARY_PATH=/usr/local/lib:$LD_LIBRARY_PATH
# Run RGB-D mode slam
./Examples/RGB-D/rgbd_orbbec_gemini2 Vocabulary/ORBvoc.txt Examples/RGB-D/Orbbec_Gemini2.yaml
Resources
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.