Introdução ao ArduPy
Para começar a usar o ArduPy, primeiro é necessário instalar aip - ArduPy Integrated Platform, que é um utilitário para desenvolver ArduPy e interagir com a placa ArduPy. Ele permite que os usuários comecem rapidamente com ardupy. aip foi feito para ser uma ferramenta simples de linha de comando. Você pode personalizar o seu próprio firmware ardupy por meio dele, sem precisar conhecer mais detalhes sobre ArduPy.
Placas Suportadas
Início Rápido com ArduPy
O método a seguir é usado para experimentar o software ArduPy da forma mais simples. Siga os procedimentos para começar agora!
- ETAPA.1 Entrar no modo bootloader
Conecte seu dispositivo ao PC via conexão USB. Entre no modo bootloader reiniciando o dispositivo rapidamente.
Deve aparecer uma unidade USB chamada Arduino no seu PC. Acesse o local da unidade USB Arduino.
- ETAPA.2 Baixar o Firmware ArduPy UF2
Baixe o firmware ArduPy na forma de arquivos UF2.
- Para Wio Terminal
- Para Seeeduino XIAO
e salve-o na sua unidade.
- ETAPA.3 Gravar o Firmware ArduPy no Dispositivo
Depois de baixar o firmware para o seu dispositivo, arraste os arquivos .UF2 para a unidade USB ARDUINO. Agora, sua placa desaparecerá do PC. Reinicie a placa e o firmware ArduPy terá sido carregado nela!
- ETAPA.4 Piscar o dispositivo
Agora, haverá uma unidade USB chamada ARDUPY aparecendo no seu PC. Abra ARDUPY e você verá um arquivo python main.py. Abra o main.py com seu editor favorito, como Microsoft Visual Studio Code, Atom, Sublime Text etc. Copie o código a seguir e salve o main.py.
from machine import Pin, Map
import time
LED = Pin(Map.LED_BUILTIN, Pin.OUT)
while True:
LED.on()
time.sleep(1)
LED.off()
time.sleep(1)
Agora você deve ver o LED embutido do seu dispositivo começar a piscar! Veja as seções abaixo para descobrir mais sobre ArduPy! Você aprenderá sobre a ferramenta ArduPy-aip e como usar aip para compilar e gravar seu próprio firmware nos dispositivos!
Instalar aip no macOS
Para usuários de macOS, você pode simplesmente executar o seguinte no Terminal para instalar o ArduPy-aip:
pip3 install ardupy-aip
Nota: certifique-se de que você instalou o Python 3 no macOS. Para instalar o Python 3, você pode usar o Homebrew, que é um gerenciador de pacotes de software para macOS. Depois de instalar o Homebrew, execute o seguinte para instalar o python 3: brew install python3. Você também pode baixar e instalar o Python 3 a partir do site oficial do Python.
Instalar aip no Windows
Você pode baixar as versões mais recentes do ArduPy para Windows na sessão abaixo. Depois de baixar, extraia o binário aip para um diretório que esteja no seu PATH.
Ou, se você tiver o ambiente Python 3, também pode instalar usando pip3:
pip3 install ardupy-aip
Instalar aip no Linux
Para usuários de Linux, você pode simplesmente executar o seguinte no Terminal para instalar o ArduPy-aip:
pip3 install ardupy-aip
Nota: verifique se você tem o Python 3 instalado e se o pip3 está atualizado.
ArduPy-aip CLI
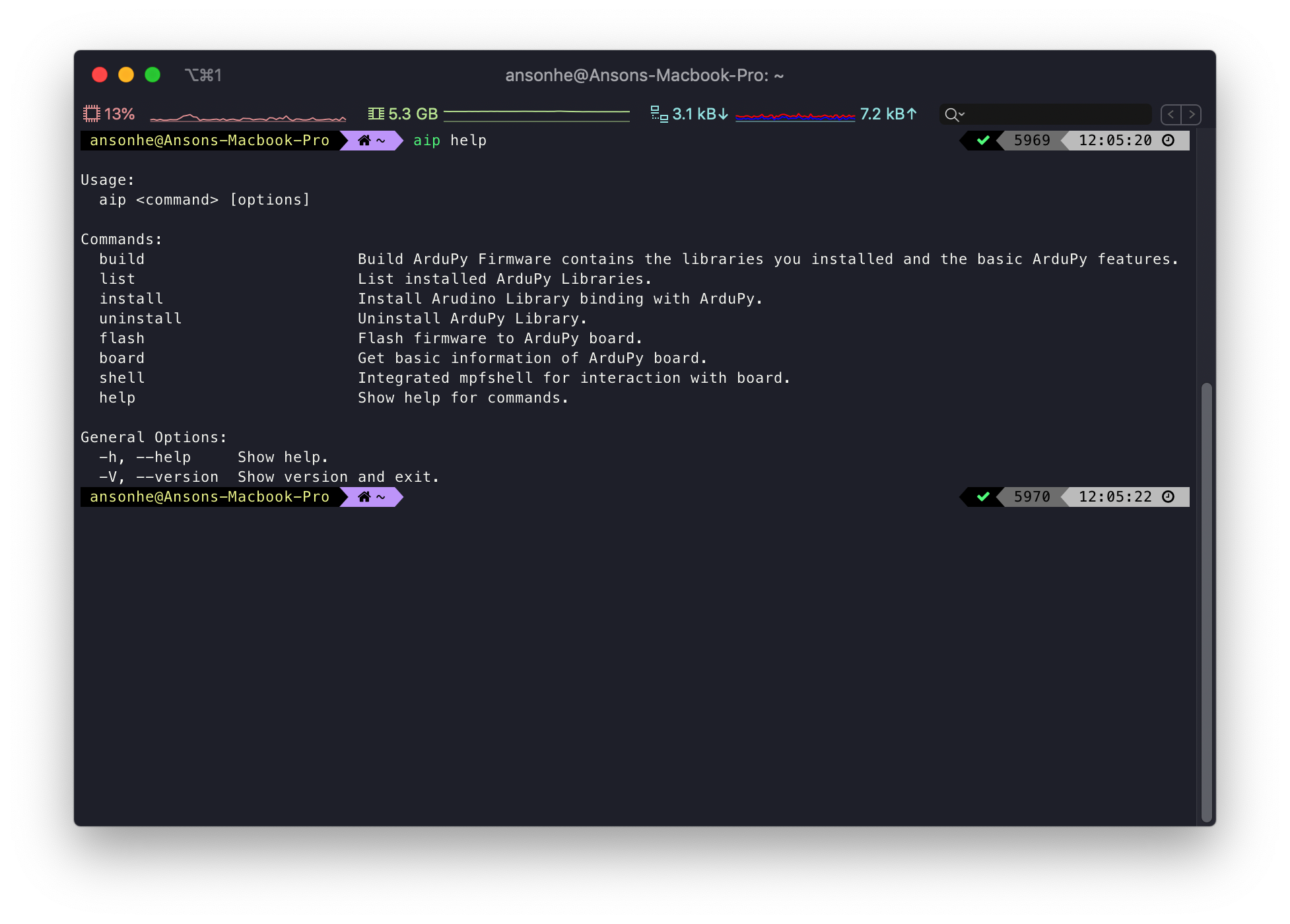
aip é uma interface de linha de comando para ArduPy; você pode usar o aip para instalar bibliotecas ArduPy, compilar e gravar firmware ArduPy em hardware com facilidade. Basta usar help para obter mais informações:
aip help
- Para obter informações da placa (informações do firmware):
aip board
- Para instalar bibliotecas Arduino vinculadas ao ArduPy:
Verifique aqui as bibliotecas ArduPy disponíveis.
aip install <ArduPy Library Path>
# Example Usage:
# aip install Seeed-Studio/seeed-ardupy-ultrasonic-sensor
- Para desinstalar bibliotecas ArduPy:
aip uninstall <ArduPy Library Path>
# Example Usage:
# aip uninstall Seeed-Studio/seeed-ardupy-ultrasonic-sensor
- Para listar bibliotecas ArduPy instaladas
aip list
- Para compilar firmware ArduPy contendo as bibliotecas que você instalou e os recursos básicos do ArduPy. Observe que agora você pode escolher compilar para Seeeduino XIAO ou Wio Terminal!
aip build --board=<board>
# For Seeeduino XIAO:
# aip build --board=xiao
# For Wio Terminal:
# aip build --board=wio_terminal
- Para gravar o firmware ArduPy no hardware:
aip flash
!!!Note
Depois dos comandos, você pode usar a flag -h para ver mais formas de uso desse comando. Por exemplo, aip flash -h.
- Para interagir com a placa (explorador de arquivos baseado em shell):
aip shell
Nota: Depois de entrar no ardupy-mpfshell, você pode usar help para obter mais informações e comandos.
- Entrando no modo REPL:
aip shell -c "repl"

- Para executar arquivo Python:
aip shell -n -c "runfile <YourPythonFilePath> [Path]"
# Example Usage:
# aip shell -n -c "runfile /Users/ansonhe/Desktop/ur.py"
- Para carregar arquivos na placa usando o shell:
aip shell -n -c "put <YourPythonFilePath> [Path]"
# Example Usage:
# aip shell -n -c "put /Users/ansonhe/Desktop/ur.py"
Executando seu Primeiro Script
Depois de gravar o firmware ArduPy, deve aparecer uma unidade USB chamada ARDUPY no seu PC. Você pode criar os seguintes arquivos Python para começar.
boot.py
Para executar um script MicroPython desde a inicialização, simplesmente nomeie seu projeto como boot.py na pasta raiz da placa. Esse script é executado quando o dispositivo é iniciado.
main.py
Este é o script python padrão, mas ele não é executado na inicialização. O main.py é executado quando mudanças são salvas em main.py, ou seja, ele pode recarregar automaticamente.
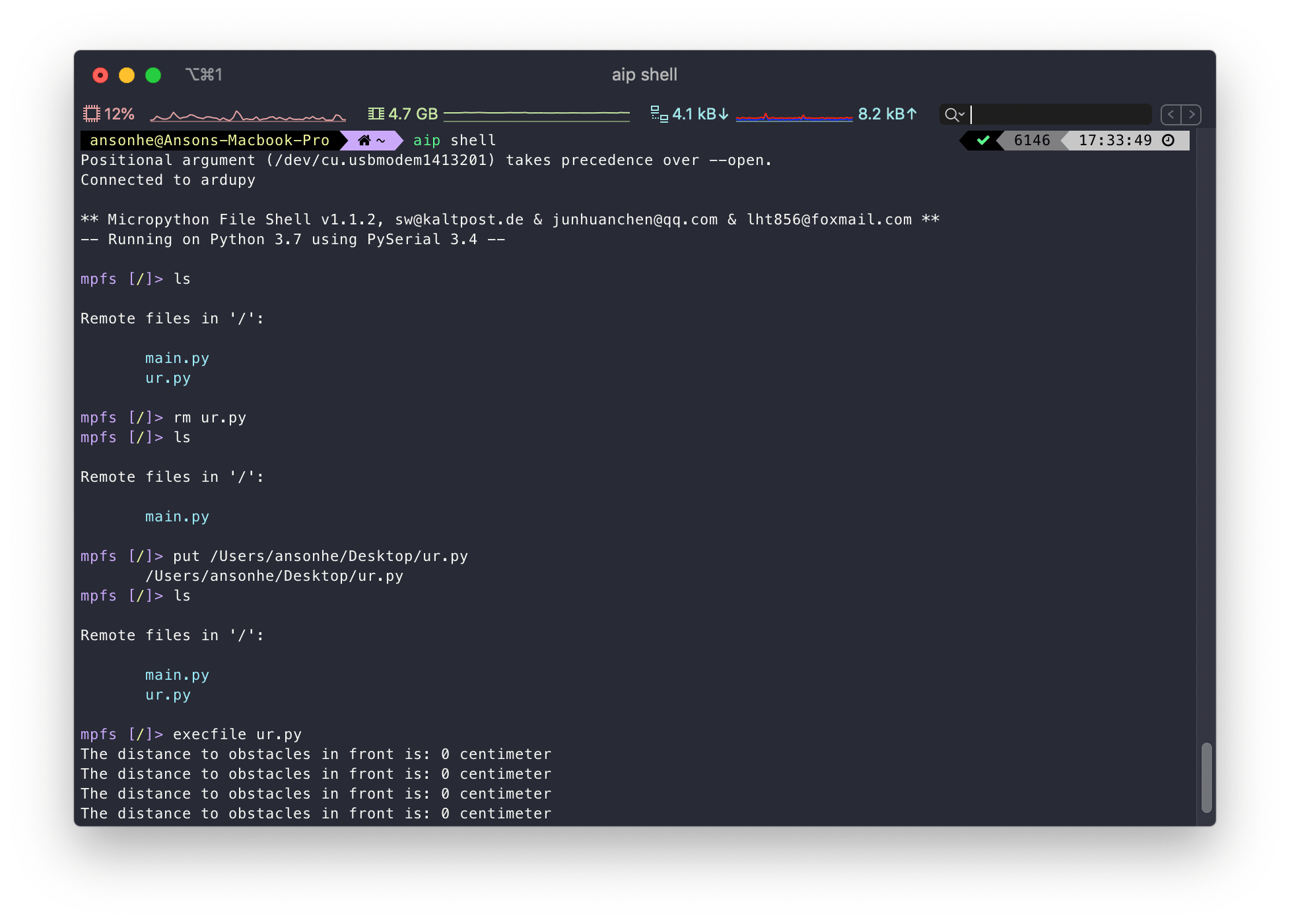
Uso dentro do ardupy-mpfshell
Depois de entrar no ardupy-mpfshell, use help para verificar o uso dos comandos. Aqui estão listados alguns comandos úteis:
- Para listar arquivos nos dispositivos:
ls
- Para remover um arquivo (ou um diretório) no dispositivo:
rm <File/Directory>
- Para enviar, por exemplo, o arquivo local
boot.pypara o dispositivo:
put <YourPythonFilePath> [Path]
- Para executar os arquivos, por exemplo
test.py, no dispositivo:
execfile test.py
Usando o aip para incluir Outros Exemplos de Bibliotecas ArduPy
aip é um dos recursos-chave do ArduPy, que pode ser usado para converter bibliotecas Arduino em interface Python para serem usadas no ArduPy. Aqui fornecemos um exemplo de como incluir a biblioteca ArduPy no firmware ArduPy usando o Wio Terminal:
- Abra o Terminal/Powershell e execute o seguinte para instalar bibliotecas ardupy.
aip install Seeed-Studio/seeed-ardupy-ultrasonic-sensor
- Compile o firmware:
aip build --board=wio_terminal
Nota: O uso para gravação do firmware aparecerá no final da compilação.
- Grave o firmware "NOVO" na placa copiando o uso a partir do final da compilação. Aqui o aip procurará automaticamente a placa conectada ao PC e fará o upload do firmware. Se a placa não estiver conectada, aparecerá um erro.
aip flash
Exemplo de Uso da Biblioteca
Depois que a biblioteca estiver incluída no firmware ArduPy e gravada no dispositivo, você poderá importar e usar o módulo da seguinte forma:
aip shell -n -c "put /Users/ansonhe/Desktop/ur.py"
Substitua
/Users/ansonhe/Desktoppelo seu caminho.
onde o ur.py é:
from arduino import grove_ultra_ranger
import time
ur = grove_ultra_ranger(0)
while True:
print ("The distance to obstacles in front is:", ur.cm, 'centimeter')
time.sleep(1)
Para mais referências, consulte seeed-ardupy-ultrasonic-sensor.
FAQ
Para mais referências sobre o aip, visite ardupy-aip para saber mais.
Tempo e Atraso
- Importando o módulo time e usando atraso:
import time
time.sleep(1) # Delay for 1 second
time.sleep_ms(500) # Delay for 500 milliseconds
time.sleep_us(500) # Delay for 500 microseconds
- Usando contador de tempo:
import time
time.ticks_ms() # milliseconds counter
start = time.ticks_us() # microseconds counter
time.ticks_diff(time.tick_us(), start) # Measure the difference between counters
Nota: Você pode usar a tecla TAB para sugerir automaticamente e ver todas as funções disponíveis. Por exemplo, depois de digitar time., pressione TAB para ver todas as funções em time.
Para mais referências, visite funções relacionadas a tempo do MicroPython.
Pino e GPIO
Diagrama de Pinagem do Seeeduino XIAO
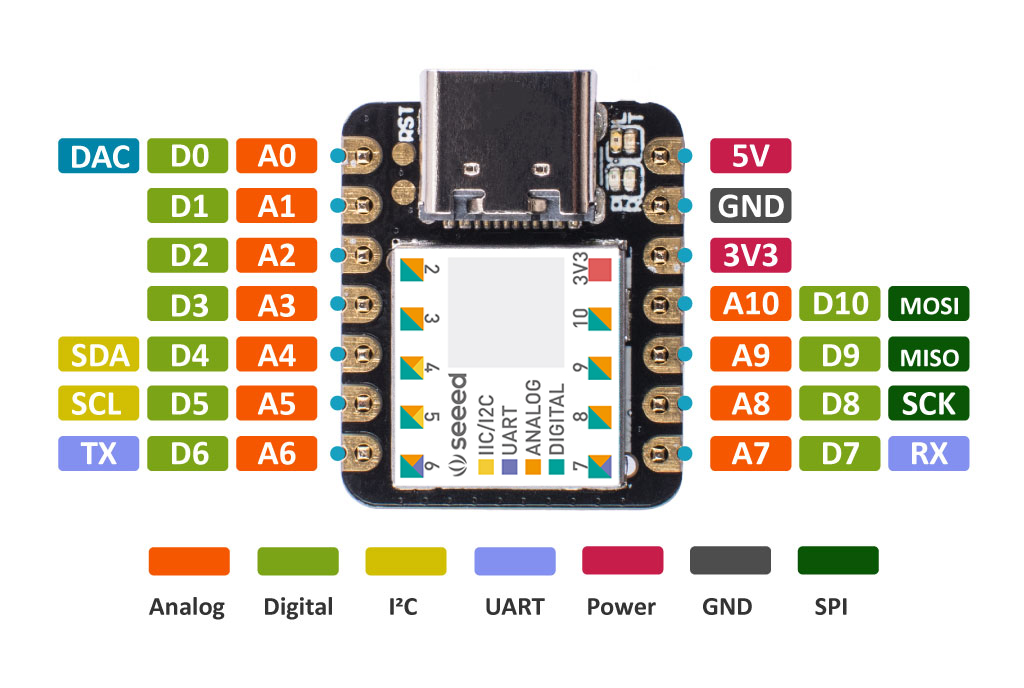
Diagrama de Pinagem do Wio Terminal
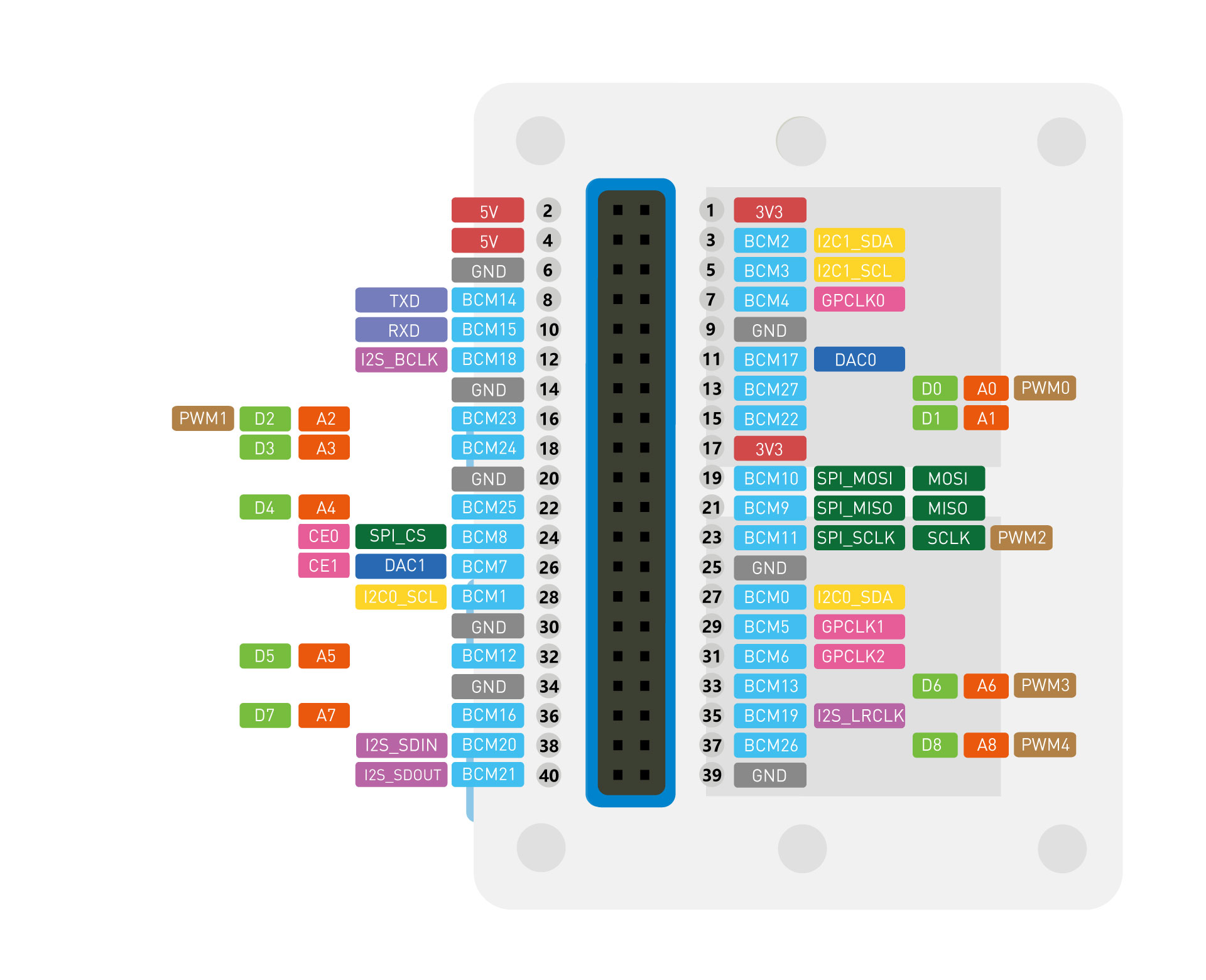
Para fazer referência ao GPIO em ArduPy, basta usar o mapa de pinos físicos do dispositivo que você está usando. Por exemplo, para o Wio Terminal, o Pino 1 é 3.3V e o Pino 2 é 5V.
- Importando Pin e configurando o GPIO:
from machine import Pin
p3 = Pin(3, Pin.OUT) # Setting Pin 3 as a output pin
p3.on() # Setting Pin 3 to HIGH
p3.off() # Setting Pin 3 to LOW
p3.value(1) # Setting Pin 3 to HIGH using value method
p5 = Pin(5, Pin.IN) # Setting Pin 5 as input pin
p5.value() # Prints the value of the input pin
p3 = Pin(3, Pin.OUT, value=1) # Setting Pin 3 as output pin and HIGH in one line
p5 = Pin(5, Pin.IN, Pin.PULL_UP) # Setting Pin 5 as input with pull-up resistors
Mapa
Para facilitar o acesso aos periféricos das placas, o ArduPy mapeou os mesmos métodos de chamada do Arduino:
from machine import Pin, Map
import time
LED = Pin(Map.LED_BUILTIN, Pin.OUT) # Setting builtin LED as output
while True:
LED.on()
time.sleep(1)
LED.on()
time.sleep(1)
PWM (Modulação por Largura de Pulso)
Para usar PWM, você deve usar os canais PWM no dispositivo. Consulte novamente o mapa de pinos do dispositivo e indique onde estão os canais PWM.
- Usando PWM:
from machine import Pin, PWM
pwm0 = PWM(Pin(13)) # Creating PWM Channel on Pin 13
pwm0.freq() # Current frequency
pwm0.freq(1000) # Sets the frequency to 1000Hz
pwm0.duty() # Current duty cycle
pwm0.duty(200) # Sets the duty cycle to 200
pwm0.deinit() # Switch off PWM on the pin
pwm1 = PWM(Pin(16), freq=1000, duty=200) # PWM in one line
ADC
Para usar ADC no dispositivo, você deve usar os pinos analógicos. Por exemplo, Pino 13(A0) no Wio Terminal.
Nota: o canal ADC no Wio Terminal é de 10 bits (0-1023).
- Usando ADC
from machine import ADC, Pin
adc = ADC(Pin(13)) # Crating ADC on Pin 13
adc.read() # reading ADC value, 0 ~ 1023
DAC
Para usar DAC no dispositivo, você deve usar os pinos DAC ou pinos PWM na placa. Por exemplo, Pino 11(DAC0) no Wio Terminal.
Nota: o canal DAC no Wio Terminal é de 12 bits (0-4095).
- Usando DAC:
from machine import DAC, Pin
dac0 = DAC(Pin(11)) # Creating DAC on Pin 11
dac0.write(512) # Writing value to DAC, 512/4096*3.3 = 0.4125 V
dac1 = DAC(Pin(26), resolution=10) # Creating DAC on Pin 26 and using 10 bit resolution
dac1.write(1023) # Writing max output to DAC, 3.3V
Nota: Ao usar DAC em pinos PWM, a resolução no canal será de apenas 8 bits.
# Using DAC om PWM Pins
from machine import DAC, Pin
dac2 = DAC(Pin(16)) # Creating DAC on Pin 16
dac2.write(128) # Writing value to DAC, 128/255*3.3 = 1.65V
LCD
Para o Wio Terminal, o display TFT LCD pode ser usado como a seguir. Para mais referências sobre LCD, visite ArduPy LCD API Reference.
- Usando o módulo LCD:
from machine import LCD
lcd = LCD() # Initialize LCD and turn the backlight
lcd.fillScreen(lcd.color.BLACK) # Fill the LCD screen with color black
lcd.setTextSize(2) # Setting font size to 2
lcd.setTextColor(lcd.color.GREEN) # Setting test color to Green
lcd.drawString("Hello World!", 0, 0) # Printing Hello World at (0, 0)
Nota: Use tab para ver as funções disponíveis.
Primeiros Passos com a IDE
Como mencionado antes, você pode usar seu editor preferido para escrever seu programa em Python. Para executar e testar o programa facilmente, você pode simplesmente editar o arquivo main.py na unidade USB ARDUPY (recarregamento automático). Aqui será demonstrado outro exemplo rápido usando o Wio Terminal:
Certifique-se de que você seguiu os procedimentos acima antes da próxima sessão.
1.Abra main.py na unidade USB ARDUPY.
2.Copie o seguinte código para main.py e salve o arquivo.
from machine import LCD
import time, math
DEG2RAD = 0.0174532925
lcd = LCD()
lcd.fillScreen(lcd.color.BLACK)
# DRAW CIRCLE SEGMENTS
# x,y == coords of centre of circle
# start_angle = 0 - 359
# sub_angle = 0 - 360 = subtended angle
# r = radius
# colour = 16 bit colour value
def fillSegment(x, y, startAngle, subAngle, r, color):
# Calculate first pair of coordinates for segment start
sx = math.cos((startAngle - 90) * DEG2RAD)
sy = math.sin((startAngle - 90) * DEG2RAD)
x1 = sx * r + x
y1 = sy * r + y
# Draw colour blocks every inc degrees
for i in range(startAngle, startAngle+subAngle, 1):
# Calculate pair of coordinates for segment end
x2 = math.cos((i + 1 - 90) * DEG2RAD) * r + x
y2 = math.sin((i + 1 - 90) * DEG2RAD) * r + y
lcd.fillTriangle(int(x1), int(y1), int(x2), int(y2), x, y, color)
# Copy segment end to segment start for next segment
x1 = x2
y1 = y2
def main():
# Draw 4 pie chart segments
fillSegment(160, 120, 0, 60, 100, lcd.color.RED)
fillSegment(160, 120, 60, 30, 100, lcd.color.GREEN)
fillSegment(160, 120, 60 + 30, 120, 100, lcd.color.BLUE)
fillSegment(160, 120, 60 + 30 + 120, 150, 100, lcd.color.YELLOW)
time.sleep(1)
fillSegment(160, 120, 0, 360, 100, lcd.color.BLACK)
if __name__ == "__main__":
while True:
main()
3.Você deverá ver o Wio Terminal começar a desenhar um gráfico de pizza na tela instantaneamente!
O recarregamento automático pode ser muito útil ao testar pequenos programas.
Suporte Técnico
Envie qualquer problema técnico para o nosso fórum