Shield CAN-BUS V1.2

CAN-BUS é um barramento industrial comum devido à sua longa distância de transmissão, velocidade de comunicação média e alta confiabilidade. É comumente encontrado em máquinas‑ferramenta modernas, como um barramento de diagnóstico automotivo.
Este Shield CAN-BUS adota o controlador de barramento CAN MCP2515 com interface SPI e o transceptor CAN MCP2551 para fornecer ao seu Arduino/Seeeduino capacidade CAN-BUS. Com um cabo conversor OBD-II adicionado e a biblioteca OBD-II importada, você está pronto para construir um dispositivo de diagnóstico a bordo ou registrador de dados.
Versão
Este documento se aplica às seguintes versões de produtos:
| Versão | Data de Lançamento | Como Comprar |
|---|---|---|
| CAN BUS Shield V1.0 | 14 Out, 2012 |  |
| CAN BUS Shield V1.1 | 10 Ago, 2013 | |
| CAN BUS Shield V1.2 | 05 Jan, 2015 | |
| CAN BUS Shield V2.0 | 01 Ago,2017 |
O que há de novo no CAN BUS Shield V1.2
- Pads na parte traseira da PCBA
- Alterar o resistor terminal para 120 Ohm
Escolha Alternativa
Se o seu projeto tem espaço limitado e também não precisa de outras funções além de CAN-BUS, aqui está um módulo Grove CAN-BUS que é compatível com Arduino, mais compacto e econômico. Clique aqui para visitar sua página.

E se eu quiser conectar este shield ao meu carro
Se você quiser ler dados ou controlar seu carro, há um cabo OBD>DB9 disponível para você, este cabo torna mais fácil conectar ao conector OBD e ao conector DB9. Este cabo também funcionará com qualquer coisa que tenha um conector OBD. Adicionar uma chave liga/desliga produz um clique tão satisfatório.

Analisador USB-CAN
Se você quiser um Analisador de Barramento CAN para depurar seu barramento CAN, este USB-CAN Analyzer é recomendado.

Recursos
- Implementa CAN V2.0B com velocidade de até 1 Mb/s
- Interface SPI com velocidade de até 10 MHz
- Quadros de dados e remotos padrão (11 bit) e estendidos (29 bit)
- Dois buffers de recepção com armazenamento de mensagens prioritário
- Conector DB-9 padrão industrial
- Indicadores LED
O Shield CAN BUS funciona bem com Arduino UNO (ATmega328), Arduino Mega (ATmega1280/2560) bem como Arduino Leonardo (ATmega32U4).
Visão Geral do Hardware
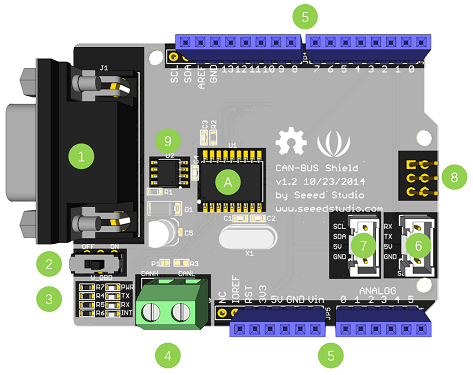
- Interface DB9 - para conectar à interface OBDII através de um cabo DBG-OBD.
- V_OBD - Recebe energia da Interface OBDII (do DB9)
- Indicador Led:
- PWR: alimentação
- TX: pisca quando os dados estão sendo enviados
- RX: pisca quando há dados sendo recebidos
- INT: interrupção de dados
- Terminal - CAN_H e CAN_L
- Pinos do Arduino UNO
- Conector Grove Serial
- Conector Grove I2C
- Pinos ICSP
- CI - MCP2551, um transceptor CAN de alta velocidade (datasheet)
- CI - MCP2515, controlador CAN autônomo com interface SPI (datasheet)
Quando você usar mais de dois Shields CAN Bus em uma mesma rede, deve levar a impedância em consideração. Você deve cortar P1 na PCI com um estilete, ou simplesmente remover o R3 da PCI.
Mapa de pinos
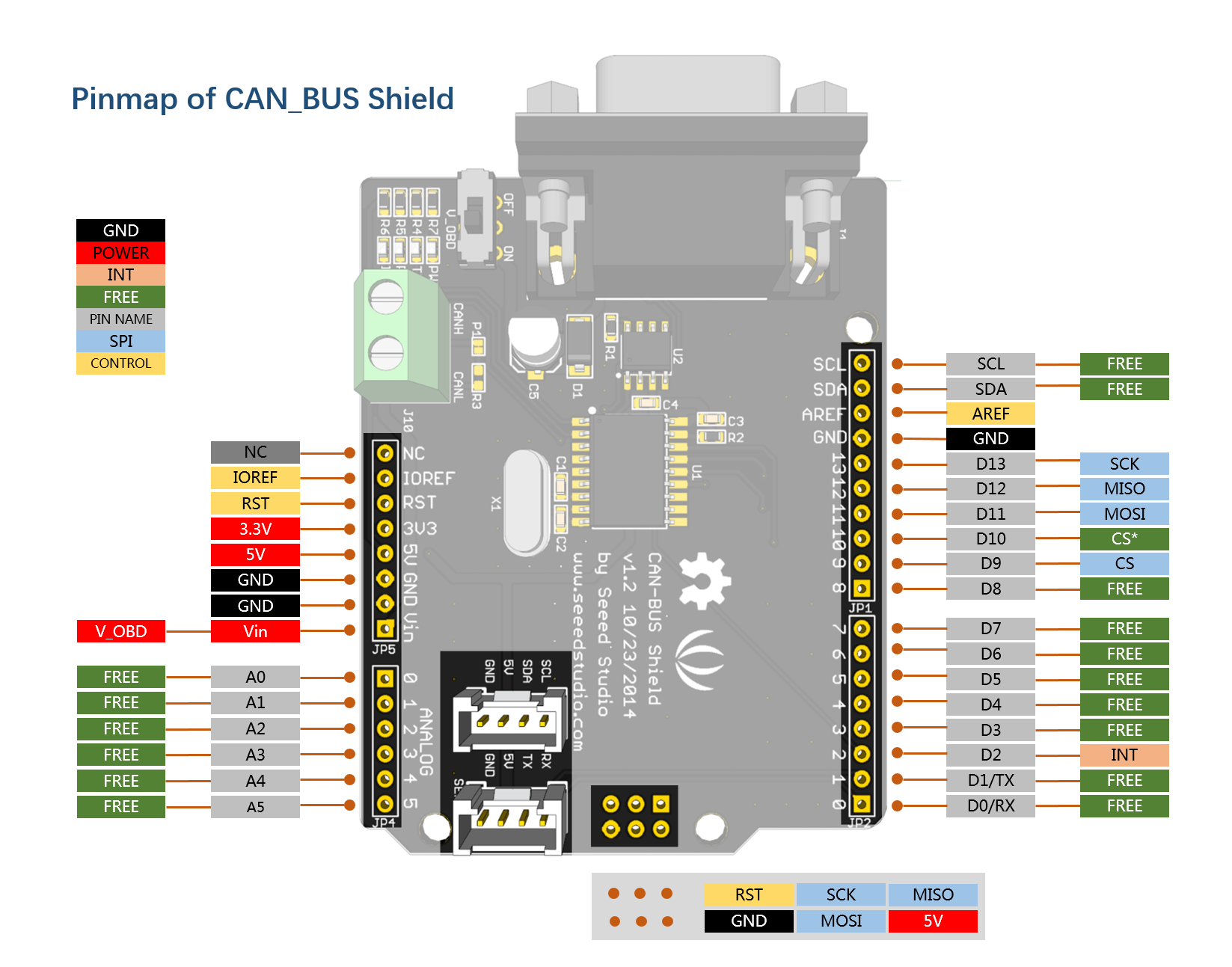
O pino FREE está disponível para outros usos.
Interface DB9&OBDii

Pino CS
O pino SPI_CS da V1.2 está conectado ao D9 por padrão. Se você quiser mudar para D10, siga as instruções abaixo.
- Passo 1: Dê uma olhada na parte traseira da PCBA, você encontrará um pad chamado CS.

- Passo 2: Corte o fio entre o pad 9 e o pad do meio.
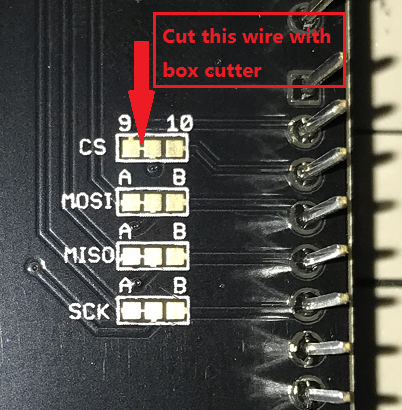
- Passo 3: Solde o pad do meio e o pad 10.
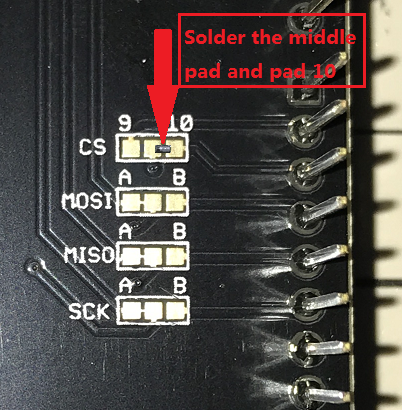
Tenha cuidado com o estilete, é fácil se machucar ou danificar a PCBA.
Pinos SPI
Os pinos SPI (SCK, MISO, MOSI) são roteados para os pinos ICSP por padrão. Mas, para algumas placas, os pinos SPI estão localizados em D11~D13. Se isso acontecer, você precisa fazer algumas alterações na PCBA. Dê uma olhada na parte traseira da PCBA, há três pads, MOSI, MISO e SCK, eles estão conectados a A por padrão. Você pode mudá-los para B se necessário.
Para Arduino UNO, Arduino Mega, Arduino Leonardo e quaisquer outras placas Arduino baseadas em AVR, ele funciona bem com a configuração padrão.
Tenha cuidado quando for alterar os pinos SPI, é fácil se machucar ou danificar a PCBA.
Primeiros Passos
Aqui está um exemplo simples para mostrar como o Shield CAN-BUS funciona. Neste exemplo precisamos de 2 Shields CAN-BUS, bem como Arduino ou Seeeduino.
Este exemplo foi construído sob o Arduino IDE versão 1.6.9.
PASSO 1: O que precisamos
| Nome | Função | Qtd | Link |
|---|---|---|---|
| CAN-BUS Shield | Comunicação de Barramento CAN | 2 | link |
| Seeeduino V4.2 | Controlador | 2 | link |
| Jumper Wire | conexão | 2 | link |
PASSO 2: Conexão de Hardware
Insira cada Shield CAN-BUS em um Seeeduino V4.2 e conecte os 2 Shields CAN-BUS juntos através de 2 jumpers. Conforme mostrado nas imagens abaixo.

CAN_H em CAN_H, CAN_L em CAN_L
PASSO 3: Software
Siga os procedimentos de como instalar uma biblioteca do arduino para instalar a biblioteca do Shield CAN BUS.
Clique no botão abaixo para baixar a biblioteca.

Instale a biblioteca no seu Arduino IDE quando for baixada.
Um dos nós (um nó significa Seeeduino + CAN_BUS Shield) atua como mestre, o outro atua como escravo. O mestre enviará dados para o escravo constantemente.
Cada nó pode atuar como mestre antes de o código ser enviado.
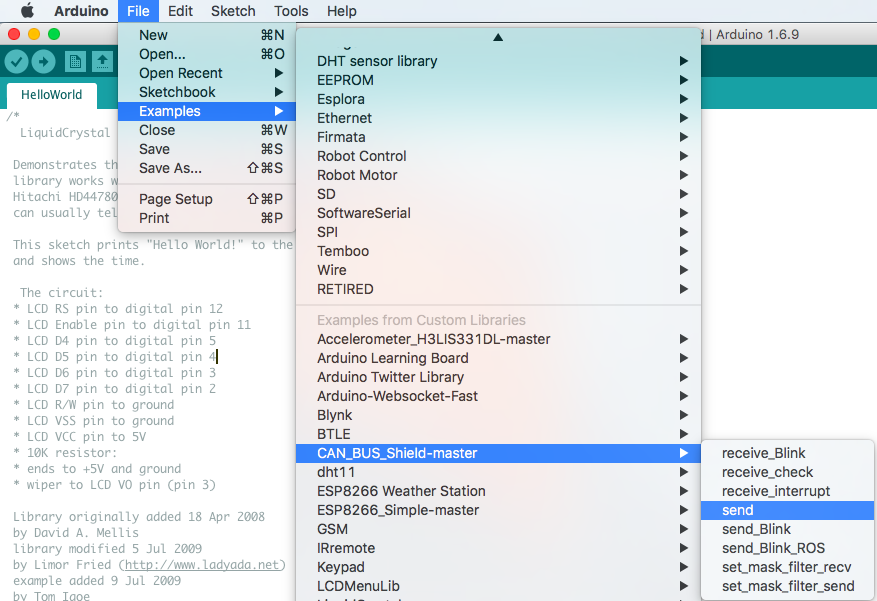
Abra o exemplo send (File > Examples > CAN_BUS_Shield-master > send) e envie para o mestre.
 Abra o exemplo receive_check (File > Examples > CAN_BUS_Shield-master > receive_check) e envie para o escravo.
Abra o exemplo receive_check (File > Examples > CAN_BUS_Shield-master > receive_check) e envie para o escravo.

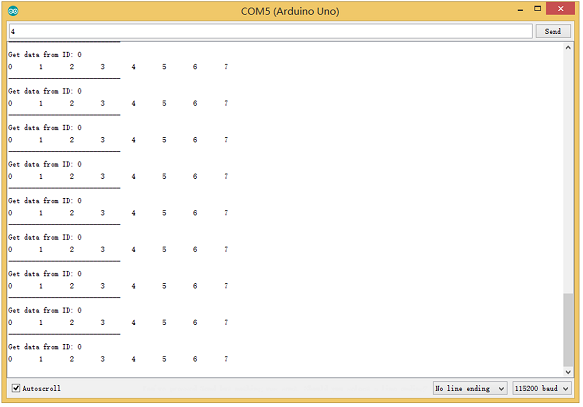
PASSO 4: Ver Resultado
Abra o Serial Monitor do Arduino IDE (escravo), você receberá os dados enviados pelo mestre.
APIs
1. Definir a taxa de baud
Esta função é usada para inicializar a taxa de baud do sistema de Barramento CAN.
As taxas de baud disponíveis estão listadas a seguir:
#define CAN_5KBPS 1 #define CAN_10KBPS 2 #define CAN_20KBPS 3 #define CAN_25KBPS 4 #define CAN_31K25BPS 5 #define CAN_33KBPS 6 #define CAN_40KBPS 7 #define CAN_50KBPS 8 #define CAN_80KBPS 9 #define CAN_83K3BPS 10 #define CAN_95KBPS 11 #define CAN_100KBPS 12 #define CAN_125KBPS 13 #define CAN_200KBPS 14 #define CAN_250KBPS 15 #define CAN_500KBPS 16 #define CAN_666kbps 17 #define CAN_1000KBPS 18
2. Definir Máscara e Filtro de Recepção
Existem 2 registradores de máscara de recepção e 5 registradores de filtro no chip controlador que garantem que você obtenha dados do dispositivo de destino. Eles são úteis especialmente em uma grande rede composta por numerosos nós.
Fornecemos duas funções para você utilizar essas máscaras e registradores de filtro. São elas:
Máscara:
init_Mask(unsigned char num, unsigned char ext, unsigned char ulData);
Filtro:
init_Filt(unsigned char num, unsigned char ext, unsigned char ulData);
- num representa qual registrador usar. Você pode preencher 0 ou 1 para máscara e 0 a 5 para filtro.
- ext representa o status do quadro. 0 significa que é uma máscara ou filtro para um quadro padrão. 1 significa que é para um quadro estendido.
- ulData representa o conteúdo da máscara ou filtro.
3. Verificar Recepção
O MCP2515 pode operar em modo de pesquisa, em que o software verifica se um quadro foi recebido, ou usando pinos adicionais para sinalizar que um quadro foi recebido ou que a transmissão foi concluída.
Use a seguinte função para pesquisar quadros recebidos.
INT8U MCP_CAN::checkReceive(void);
A função retornará 1 se um quadro chegar e 0 se nada chegar.
4. Obter o ID CAN
Quando alguns dados chegarem, você pode usar a seguinte função para obter o ID CAN do nó de "envio".
INT32U MCP_CAN::getCanId(void)
5. Enviar Dados
CAN.sendMsgBuf(INT8U id, INT8U ext, INT8U len, data_buf);
É uma função para enviar dados ao barramento. Nessa função:
- id representa de onde os dados vêm.
- ext representa o status do quadro. '0' significa quadro padrão. '1' significa quadro estendido.
- len representa o comprimento deste quadro.
- data_buf é o conteúdo desta mensagem.
Por exemplo, no exemplo de 'envio', temos:
unsigned char stmp[8] = 7; CAN.sendMsgBuf(0x00, 0, 8, stmp); //send out the message 'stmp' to the bus and tell other devices this is a standard frame from 0x00.
6. Receber Dados
A seguinte função é usada para receber dados no nó de 'recepção':
CAN.readMsgBuf(unsigned char len, unsigned char buf); Nas condições em que máscaras e filtros foram configurados, esta função só pode obter quadros que atendam aos requisitos de máscaras e filtros.
- len representa o comprimento dos dados.
- buf é onde você armazena os dados.
Gerar uma Nova BaudRate
Nós fornecemos muitas taxas de transmissão frequentemente usadas, como abaixo:
#define CAN_5KBPS 1 #define CAN_10KBPS 2 #define CAN_20KBPS 3 #define CAN_25KBPS 4 #define CAN_31KBPS 5 #define CAN_33KBPS 6 #define CAN_40KBPS 7 #define CAN_50KBPS 8 #define CAN_80KBPS 9 #define CAN_83KBPS 10 #define CAN_95KBPS 11 #define CAN_100KBPS 12 #define CAN_125KBPS 13 #define CAN_200KBPS 14 #define CAN_250KBPS 15 #define CAN_500KBPS 16 #define CAN_666KBPS 17 #define CAN_1000KBPS 18
Mesmo assim você ainda pode não encontrar a taxa que deseja. Aqui fornecemos um software para ajudá-lo a calcular a taxa de transmissão de que você precisa.
Clique aqui para baixar o software, ele está em chinês, mas não se preocupe, é fácil de usar.

Este software suporta apenas o sistema Windows. Se você não conseguir abri-lo, sinta-se à vontade para contatar [email protected] para obter suporte.
Abra o software, o que você precisa fazer é definir a taxa de transmissão desejada e, em seguida, fazer algumas configurações simples, depois clicar em calculate.
Então você obterá alguns dados, cfg1, cfg2 e cfg3.
Você precisa adicionar algum código à biblioteca.
Abra mcp_can_dfs.h, você precisa adicionar o código abaixo por volta da linha 272:
#define MCP_16MHz_xxxkBPS_CFG1 (cfg1) // xxx é a taxa de transmissão de que você precisa #define MCP_16MHz_xxxkBPS_CFG2 (cfg2) #define MCP_16MHz_xxxkBPS_CFG3 (cfg2)
Então vamos para aproximadamente a linha 390, adicione o código abaixo:
#define CAN_xxxKBPS NUM // xxx é a taxa de transmissão de que você precisa, e NUM é um número, você precisa obter um diferente das outras taxas.
Abra mcp_can.cpp, vá para a função mcp2515_configRate(por volta da linha 190) e adicione o código abaixo:
case (CAN_xxxKBPS): cfg1 = MCP_16MHz_xxxkBPS_CFG1; cfg2 = MCP_16MHz_xxxkBPS_CFG2; cfg3 = MCP_16MHz_xxxkBPS_CFG3; break;
Então você pode usar a taxa de transmissão de que precisa. E, por favor, me envie um pull request no GitHub quando você usar uma nova taxa, assim posso adicioná-la à biblioteca para ajudar outras pessoas.
Projetos
Se você quiser fazer alguns projetos incríveis com o CAN-BUS shield, aqui estão alguns projetos para referência.
Volkswagen CAN BUS Gaming

Já quis jogar um simulador de carro/caminhão com um painel de instrumentos real no seu PC? Eu também! Estou tentando controlar um painel de VW Polo 6R via CAN Bus com um Arduino Uno e um Seeed CAN Bus Shield. Inspirado por Silas Parker. Obrigado ao Sepp e ao Is0-Mick pelo grande apoio!
![]()
Hackeie o CAN-BUS do seu veículo

Veículos modernos vêm todos equipados com uma Rede de Área de Controlador CAN-BUS. Em vez de ter um milhão de fios indo e voltando de vários dispositivos no seu carro até a bateria, está se fazendo uso de um sistema mais inteligente.
Todas as funções eletrônicas estão conectadas ao TIPM (Totally Integrated Power Module), como solenóides/relevos para travar as portas ou mini motores para subir os vidros etc.
De cada nó (isto é, o módulo de interruptor que controla seus vidros ou travas elétricas das portas) é transmitida uma mensagem através do CAN. Quando o TIPM detecta uma mensagem válida, ele reagirá de acordo, como travar as portas, acender as luzes e assim por diante.
![]()
FAQ
P1: Não consigo obter dados de outro dispositivo CAN.
- Verifique se a conexão está correta
- Verifique se a configuração da taxa de transmissão está correta
P2: O monitor serial imprime Init Fail.
- Verifique se a configuração do pino CS corresponde ao código. Para o CAN Bus Shield V1.1/1.2, o pino CS está conectado a D9, os outros estão em D10.
P3. Onde posso encontrar suporte técnico se eu tiver outros problemas.
- Você pode postar uma pergunta no Fórum da Seeed.
Recursos
- 【PDF】Esquemáticos do CAN-BUS Shield V1.2
- 【Eagle】Esquemático do CAN-BUS Shield V1.2
- 【Library】Biblioteca Arduino para CAN-BUS Shield
- 【Datasheet】Datasheet do MCP2515
- 【Datasheet】Datasheet do MCP2551
- 【Demo】Uma Demo OBD
- 【Tool】Ferramenta de Taxa de Transmissão MCP2515
- 【Tool】Analisador USB-CAN
- 【Cable】Cabo DB9 para OBD2
Suporte Técnico & Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para lhe fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.