Grove - GPS (Air530 / Air530Z)
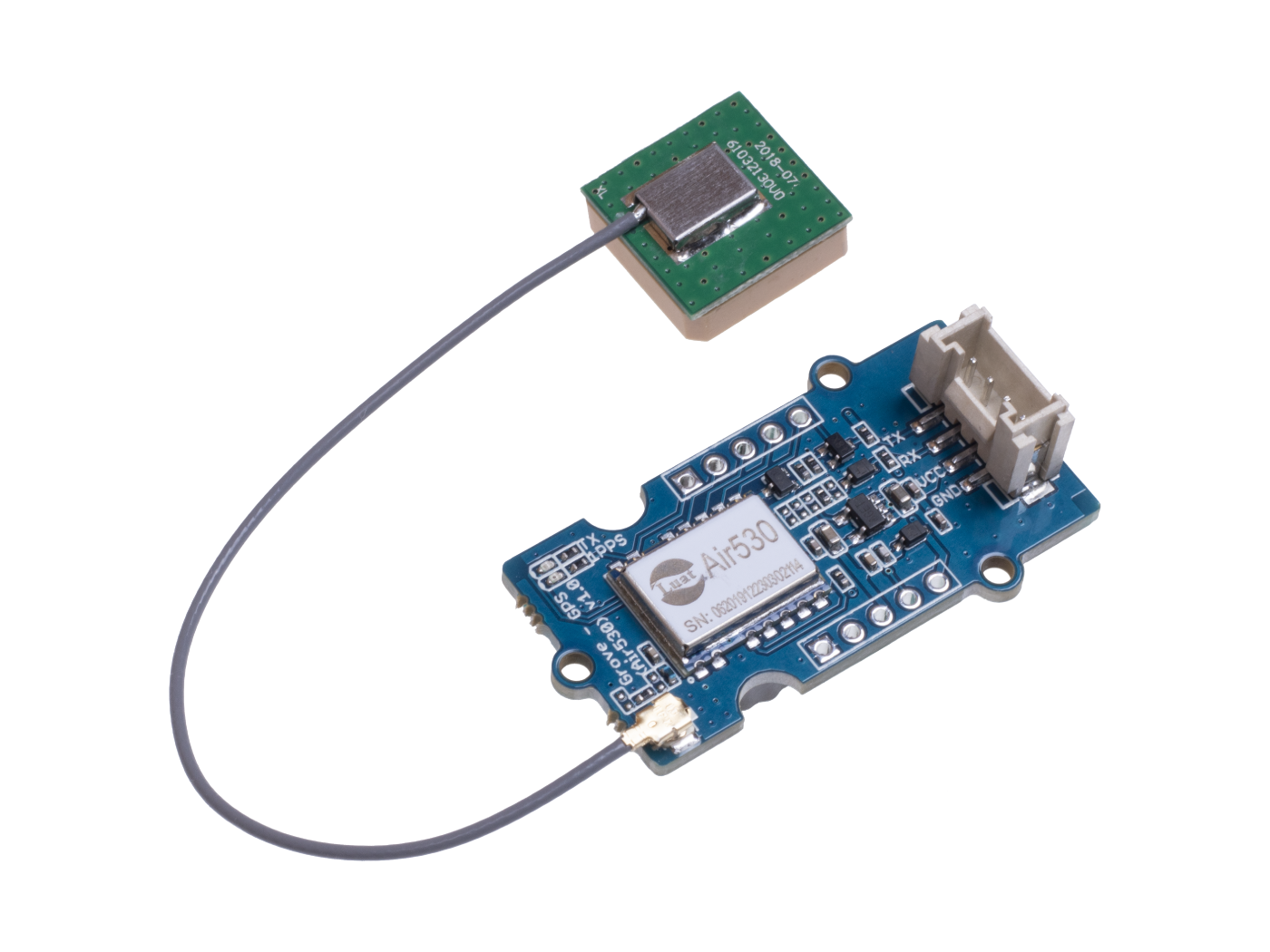
Confuso porque o seu GPS não funciona bem em áreas urbanas ou ao ar livre usando apenas um ou poucos módulos de satélite? Então você não deve perder o nosso novo Grove-GPS (Air530 / Air530Z). É um módulo de posicionamento e navegação por satélite multi‑modo, altamente integrado e com alto desempenho. Ele suporta GPS / Beidou / Glonass / Galileo / QZSS / SBAS, o que o torna adequado para aplicações de posicionamento GNSS, como navegação automotiva, dispositivos vestíveis inteligentes e drones.
Lançamos o Seeed GPS Modules Selection Guide, que ajudará você a escolher o módulo GPS que melhor se adapta às suas necessidades.
Recursos
- Econômico
- Posicionamento e navegação por satélite multi‑modo altamente integrado
- Tamanho compacto para fácil implantação
- Volume diminuto e baixo consumo de energia
Para mais detalhes sobre os módulos Grove, consulte o Grove System
Especificações
| Parâmetro | Valor |
|---|---|
| Tensão de alimentação | 3.3V/5V |
| Corrente de trabalho | até 60mA |
| Tempo de inicialização quente | 4s |
| Tempo de inicialização a frio | 30s |
Plataformas compatíveis
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
As plataformas mencionadas acima como suportadas são uma indicação da compatibilidade teórica ou de software do módulo. Na maioria dos casos, fornecemos apenas biblioteca de software ou exemplos de código para a plataforma Arduino. Não é possível fornecer biblioteca de software / código de demonstração para todas as plataformas possíveis de MCU. Portanto, os usuários precisam escrever sua própria biblioteca de software.
Primeiros Passos
Se esta é a primeira vez que você trabalha com Arduino, recomendamos fortemente que consulte Getting Started with Arduino antes de começar.
Brincar com Arduino
Este exemplo simplesmente lê dados do GPS usando software serial e os envia de volta pela porta serial.
Hardware
- Passo 1. Prepare os itens abaixo:
| Seeeduino V4.2 | Base Shield | Grove - GPS (Air530 / Air530Z) |
|---|---|---|
 |  |  |
| Adquira agora | Adquira agora | Adquira agora |
- Passo 2. Conecte o Grove - GPS à porta D2 do Grove-Base Shield.
- Passo 3. Conecte o Grove - Base Shield ao Seeeduino.
- Passo 4. Conecte o Seeeduino ao PC através de um cabo USB.

Se não tivermos o Grove Base Shield, também podemos conectar o Grove - GPS diretamente ao Seeeduino, conforme abaixo.
| Seeeduino | Grove - GPS |
|---|---|
| 5V | Vermelho |
| GND | Preto |
| D3 | Branco |
| D2 | Amarelo |
Software
Observe que o software u-center é apenas para Windows.
- Passo 1. Instale o software u-center.
Recomendamos usar o u-center 2, o software é mais versátil e menos sujeito a travamentos.
- Passo 2. Copie o código para a Arduino IDE e faça o upload. Se você não souber como enviar o código, consulte how to upload code.
#include <SoftwareSerial.h>
SoftwareSerial SoftSerial(2, 3);
unsigned char buffer[64]; // buffer array for data receive over serial port
int count=0; // counter for buffer array
void setup()
{
SoftSerial.begin(9600); // the SoftSerial baud rate
Serial.begin(9600); // the Serial port of Arduino baud rate.
}
void loop()
{
if (SoftSerial.available()) // if date is coming from software serial port ==> data is coming from SoftSerial shield
{
while(SoftSerial.available()) // reading data into char array
{
buffer[count++]=SoftSerial.read(); // writing data into array
if(count == 64)break;
}
Serial.write(buffer,count); // if no data transmission ends, write buffer to hardware serial port
clearBufferArray(); // call clearBufferArray function to clear the stored data from the array
count = 0; // set counter of while loop to zero
}
if (Serial.available()) // if data is available on hardware serial port ==> data is coming from PC or notebook
SoftSerial.write(Serial.read()); // write it to the SoftSerial shield
}
void clearBufferArray() // function to clear buffer array
{
for (int i=0; i<count;i++)
{
buffer[i]=NULL;
} // clear all index of array with command NULL
}
-
Passo 3. Abra o U-center.
-
Passo 4. Clique em Receiver -> Port e selecione a porta COM que o Arduino está usando.
-
Passo 5. Clique em Receiver -> Baudrate e certifique-se de que 9600 está selecionado.
-
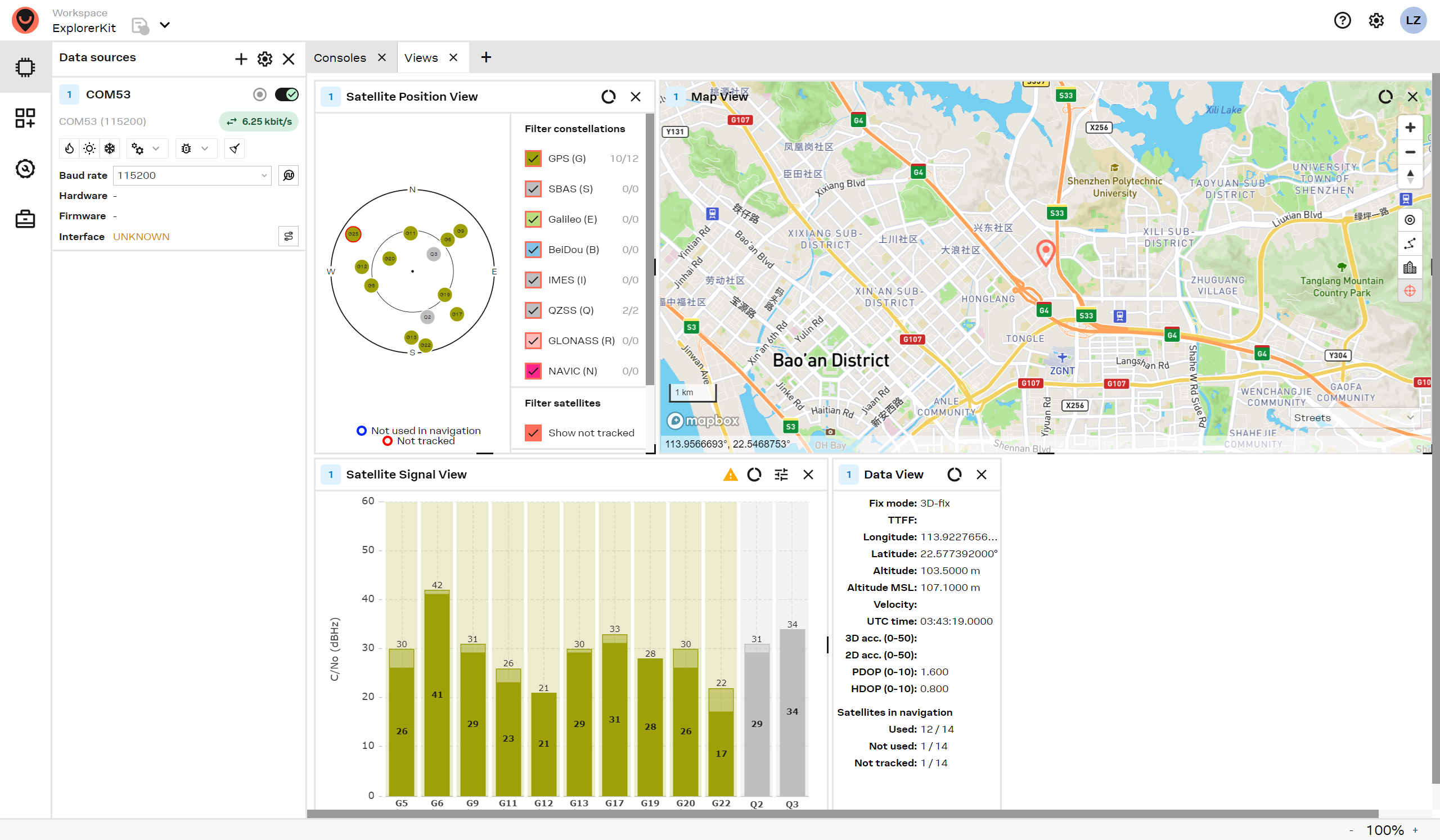
Passo 6. Clique em View -> Text Console e você deverá obter uma janela que irá transmitir dados NMEA.
-
Passo 7. Abra o monitor serial. Você poderá ver o seguinte:

Também podemos visualizar os dados no Google Earth:
Se você estiver usando o u-center 2, pode pular as etapas a seguir, pois todos esses recursos estão integrados ao u-center 2.
-
Passo 1. Clique em File -> Database Export -> Google Earth KML
-
Passo 2. Isso deverá abrir o Google Earth com o histórico que foi capturado pelo u-center.
-
Passo 3. Como alternativa, os dados podem ser gravados pressionando o círculo vermelho na barra de ferramentas, que então perguntará onde você deseja salvar o registro.
-
Passo 4. Quando tivermos capturado dados suficientes, clique no quadrado preto para parar a gravação.
-
Passo 5. Podemos então converter o arquivo .ubx gerado em KML enviando o arquivo ubx para o GPSVisualizer, e a localização (ponto vermelho) será exibida no mapa como a seguir:

Os testes devem ser feitos preferencialmente ao ar livre para evitar imprecisões de localização causadas por má transmissão de sinal.
Visualizador de Esquemático Online
Recursos
- [ZIP] Esquemático do GPS (PDF)
- [PDF] Air 530 User Booklet
- [PDF] Air 530Z User Manual (CN)
Projetos
Projeto de Rastreador GPS/GPRS: Neste novo projeto apresentaremos nosso rastreador GPS conectado usando a técnica GPRS e o protocolo MQTT.
Suporte Técnico & Discussão sobre o Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.