Grove - Sensor de Alta Temperatura
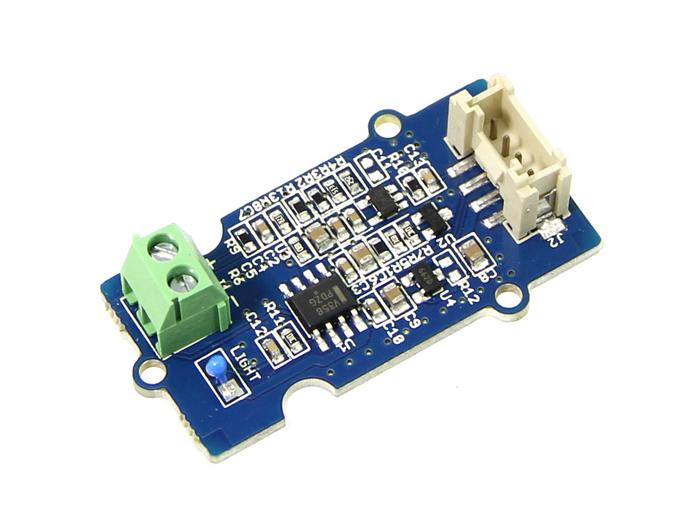
Termopares são dispositivos muito sensíveis. Eles exigem um bom amplificador com compensação de junta fria. O Grove - High Temperatire Sensor usa um termopar tipo K e um amplificador de termopar que mede a temperatura ambiente usando um termistor para compensação de junta fria. A faixa detectável deste sensor é de -50~600°C, e a precisão é de ±(2,0% + 2°C).
![]()
Atualizável para Sensores Industriais
Com o SenseCAP S2110 controller e o S2100 data logger, você pode facilmente transformar o Grove em um sensor LoRaWAN®. A Seeed não só o ajuda com a prototipagem, mas também oferece a possibilidade de expandir seu projeto com a série SenseCAP de robustos sensores industriais.
Os sensores industriais da série SenseCAP S210x proporcionam uma experiência pronta para uso em sensoriamento ambiental. Consulte o Sensor Sem Fio de Temperatura e Umidade S2101, com maior desempenho e robustez para monitoramento da qualidade do ar. A série inclui sensores para umidade do solo, temperatura e umidade do ar, intensidade de luz, CO2, EC e uma estação meteorológica 8 em 1. Experimente o mais recente SenseCAP S210x em seu próximo projeto industrial de sucesso.
| Sensor Industrial SenseCAP |
 |
| S2101 Temp do Ar & Umidade |
Versão
| Versão do Produto | Alterações | Data de Lançamento |
|---|---|---|
| Grove - High Temperature Sensor V1.0 | Inicial | 25 Fev, 2014 |
Especificações
| Parâmetro | Valor/Faixa |
|---|---|
| Tensão de operação | 3,3-5V |
| Potência máxima nominal a 25℃ | 300mW |
| Faixa de temperatura de operação | -40 ~ +125 ℃ |
| Faixa de medição de temperatura | -50 ~ +600 ℃ |
| Faixa de tensão de saída do amplificador | 0 ~ 3,3 V |
| Material do termopar | Fibra de vidro |
| Compensação de junta fria | Medição da temperatura ambiente |
| Precisão de medição de temperatura do termopar | +/-2,0% (+ 2 ℃) |
| Comprimento do cabo do sensor de temperatura do termopar | 100cm |
| Dimensão | 20mm x 40mm |
Para mais detalhes sobre os módulos Grove, consulte o Grove System
Plataformas Suportadas
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
As plataformas mencionadas acima como suportadas são uma indicação da compatibilidade de software ou teórica do módulo. Na maioria dos casos, fornecemos apenas biblioteca de software ou exemplos de código para a plataforma Arduino. Não é possível fornecer biblioteca de software / código de demonstração para todas as possíveis plataformas de MCU. Portanto, os usuários precisam escrever sua própria biblioteca de software.
Primeiros Passos
Brincar com Arduino
Hardware
- Etapa 1. Precisamos preparar os seguintes itens:
| Seeeduino V4.2 | Base Shield | Grove-High Temperature Sensor |
|---|---|---|
 |  |  |
| Adquira agora | Adquira agora | Adquira agora |
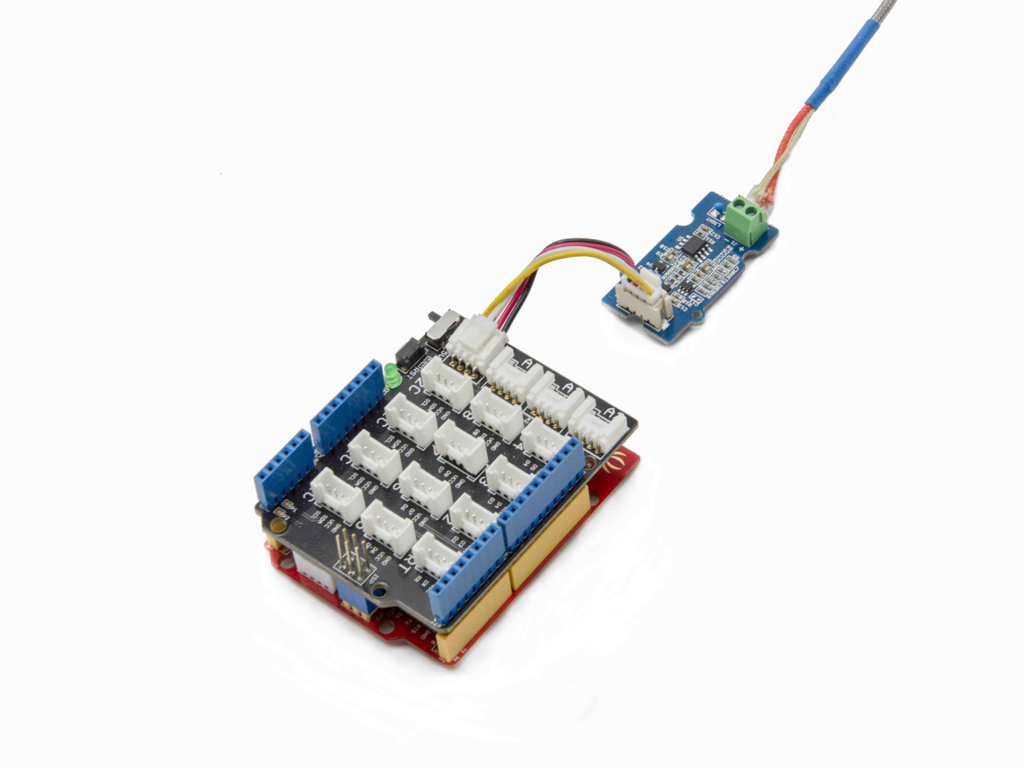
- Etapa 2. Conecte o Grove-High Temperature Sensor à porta A0 no Base Shield.
- Etapa 3. Conecte o Base Shield ao Seeeduino-V4.2.
- Etapa 4. Conecte o Seeeduino-V4.2 ao PC usando um cabo USB.
Se não tivermos um Base Shield, não se preocupe, o sensor pode ser conectado diretamente ao seu Arduino. Siga as tabelas abaixo para conectar ao Arduino.
| Seeeduino |Grove-High Temperature Sensor | |------------------|------- --| | GND | Preto | | 5V | Vermelho | | A1 | Branco | | A0 | Amarelo |
Software
- Etapa 1. Baixe a Grove-High Temperature Sensor Library no Github.
- Etapa 2. Consulte How to install library para instalar a biblioteca para Arduino.
- Etapa 3. Copie o código para a IDE do Arduino e faça o upload.
#include "High_Temp.h"
HighTemp ht(A1, A0);
void setup()
{
Serial.begin(115200);
Serial.println("grove - hight temperature sensor test demo");
ht.begin();
}
void loop()
{
Serial.println(ht.getThmc());
delay(100);
}
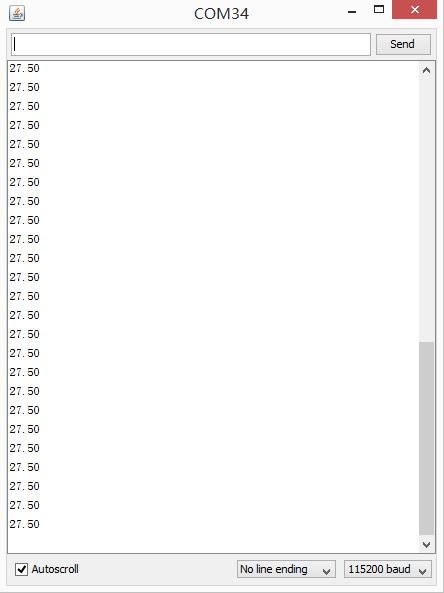
- Etapa 4. Abra o Serial Monitor e configure o baud rate como 115200. Veremos aqui a temperatura em Celsius.
Brincar com Raspberry Pi
Hardware
- Etapa 1. Prepare os seguintes itens:
| Raspberry pi | GrovePi_Plus | Grove - Ultrasonic Ranger |
|---|---|---|
 |  | |
| Adquira agora | Adquira agora | Adquira agora |
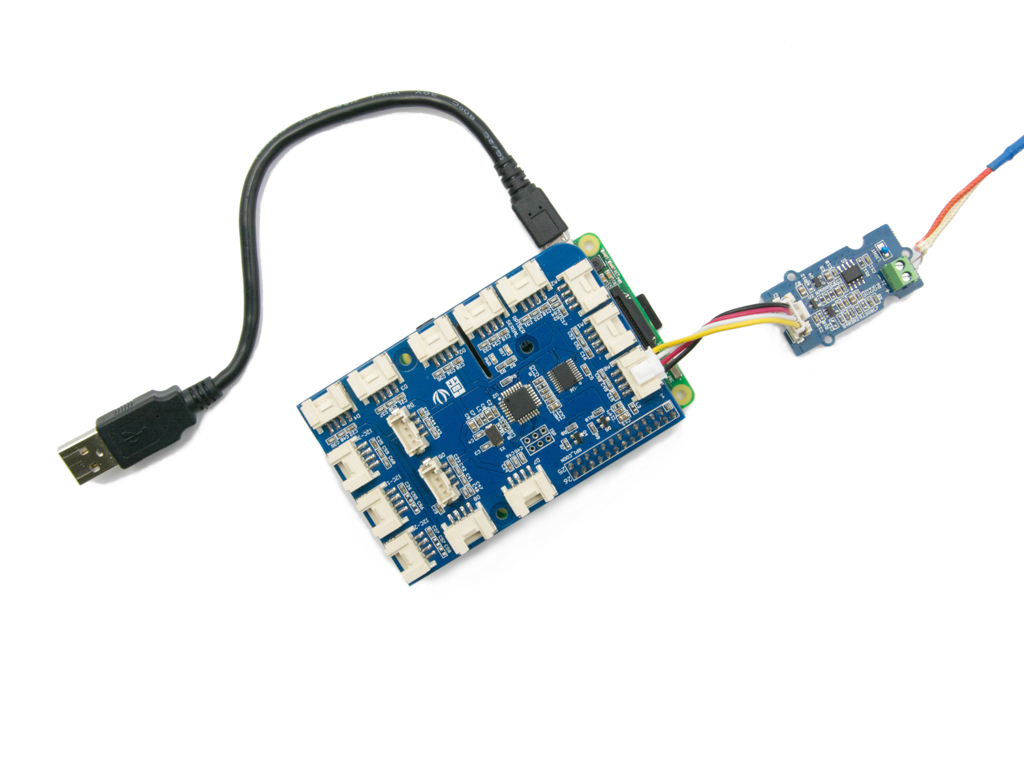
- Etapa 2. Conecte o GrovePi_Plus ao Raspberry.
- Etapa 3. Conecte o Grove-Ultrasonic Ranger à porta A0 do GrovePi_Plus.
- Etapa 4. Conecte o Raspberry ao PC através de um cabo USB.
Software
- Etapa 1. Siga Setting Software para configurar o ambiente de desenvolvimento.
- Etapa 2. Siga Updating the Firmware para atualizar o firmware mais recente do GrovePi.
Neste wiki usamos o caminho ~/GrovePi/ em vez de /home/pi/Desktop/GrovePi, você precisa ter certeza de que o Passo 2 e o Passo 3 usam o mesmo caminho.
Recomendamos fortemente que você atualize o firmware, caso contrário, para alguns sensores você poderá obter erros.
Se você estiver usando Raspberry Pi com Raspberrypi OS >= Bullseye, terá que usar esta linha de comando apenas com Python3.
- Passo 3. Execute o comando git clone no repositório do Github.
cd ~
git clone https://github.com/DexterInd/GrovePi.git
- Passo 4. Execute os comandos abaixo para usar o ultrasonic_ranger para medir a distância.
cd ~/GrovePi/Software/Python/grove_hightemperature_sensor
python3 high_temperature_example.py
Aqui está o código grove_ultrasonic.py.
import grove_hightemperature_sensor as grovepi # our library
from time import sleep # and for the sleep function
import sys # we need this for the exception throwing stuff
# Don't forget to run it with Python 3 !!
# Don't forget to run it with Python 3 !!
# Don't forget to run it with Python 3 !!
def Main():
room_temperature_pin = 15 # this is equal to A1
probe_temperature_pin = 14 # this is equal to A0
# so you have to connect the sensor to A0 port
# instatiate a HighTemperatureSensor object
sensor = grovepi.HighTemperatureSensor(room_temperature_pin, probe_temperature_pin)
# and do this indefinitely
while True:
# read the room temperature
room_temperature = sensor.getRoomTemperature()
# and also what's important to us: the temperature at the tip of the K-Type sensor
probe_temperature = sensor.getProbeTemperature()
# print it in a fashionable way
print('[room temperature: {:5.2f}°C][probe temperature: {:5.2f}°C]'.format(room_temperature, probe_temperature))
# and wait for 250 ms before taking another measurement - so we don't overflow the terminal
sleep(0.25)
if __name__ == "__main__":
try:
Main()
# in case CTRL-C / CTRL-D keys are pressed (or anything else that might interrupt)
except KeyboardInterrupt:
print('[Keyboard interrupted]')
sys.exit(0)
# in case there's an IO error aka I2C
except IOError:
print('[IO Error]')
sys.exit(0)
# in case we have a math error (like division by 0 - can happen depending on the read values)
# or if the values exceed a certain threshold
# experiment and you'll see
except ValueError as e:
print('[{}]'.format(str(e)))
sys.exit(0)
- Passo 4. Veremos a temperatura exibida no terminal como abaixo.
pi@raspberrypi:~/GrovePi/Software/Python/grove_hightemperature_sensor $ python3 high_temperature_example.py
[room temperature: 20.47°C][probe temperature: 32.19°C]
[room temperature: 20.47°C][probe temperature: 32.19°C]
[room temperature: 20.47°C][probe temperature: 32.19°C]
[room temperature: 20.47°C][probe temperature: 32.19°C]
[room temperature: 20.60°C][probe temperature: 32.19°C]
[room temperature: 20.60°C][probe temperature: 32.19°C]
[room temperature: 20.60°C][probe temperature: 32.19°C]
Perguntas Frequentes
P1: Como fazer a calibração do sensor Grove-High Temperature?
R1: Baixe a libray e siga as instruções abaixo.
- Passo 1. execute o getTemperature-calibration-measurement.ino para obter as informações abaixo.
10:02:17.792 -> "You have Scucessfully record the sample data,please copy the following line of code to your clipboard and replace the first line of function loop()
10:02:17.935 -> double TMP[]={10.29,10.29,10.29,10.29,10.29,10.29,10.29,10.29,10.29,10.29};
10:02:18.038 -> double Real_temperature[]={10.00,20.00,30.00,40.00,50.00,60.00,70.00,80.00,90.00,100.00};
-
Passo 2. cole em getTemperature-calibration_demo.ino e execute a calibração.
-
Passo 3. execute getTemperature.ino para ler a temperatura.
Recursos
- [PDF] Baixar Wiki em PDF
- [Eagle] Arquivo Eagle do Grove - High Temperature Sensor
- [Library] Biblioteca High Temperature Sensor
- [Datasheet] OPA333 PDF
- [Datasheet] LMV358 PDF
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.