Grove - I2C Motor Driver (L298P)

Grove - I2C Motor Driver(L298P) é um driver de motor de uso comum para motor de passo e motor servo. Ele incorpora um chip STM32 para gravar o código para controlar o driver de motor. Este é um driver de motor de 2 canais, cada canal pode suportar até 1A de corrente. Você também pode usar a interface I2C para transmitir dados a partir do microcontrolador periférico. O endereço I2C padrão é 0x0f e você pode alterar o endereço do driver de motor conectando o chapéu de fio I2C. O endereço I2C é selecionável de 0x00 a 0x0f.
Características
- MCU: microcontrolador STM32f030f4P6 para gravar o código e controlar o Driver de Motor.
- Chip driver de motor L298P: de uso comum para um driver de motor e pode acionar motor de passo e motor servo.
- Endereço I2C selecionável: altere a conexão do chapéu de fio para obter o endereço I2C de 0x00 a 0x0f, o endereço I2C padrão é 0x0f.
- Saída de 2 canais: capaz de suportar 1A de corrente em cada canal, máximo de 2A de corrente; Necessita de entrada de tensão CC de 6V-12V.
- LED de usuário: LED verde aceso para a direção no sentido horário e LED vermelho aceso para a direção anti-horária para cada canal.
Especificação
| Item | Valor |
|---|---|
| MCU | STM32f030f4P6 |
| Fonte de Alimentação | 6-12V CC |
| Interface | Grove I2C |
| Endereço I2C | Padrão 0x0f, pode ser alterado conectando o chapéu de fio |
| Canal | 2 |
| Corrente de saída | MÁX 2A, 1A para cada canal |
| Tensão de saída | 5V |
Plataforma Suportada
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
Primeiros Passos
Usar a plataforma Arduino
Materiais Necessários
| Seeeduino V4.2 | Base Shield | Grove - I2C Motor Driver (L298P) |
|---|---|---|
 |  |  |
| Adquira agora | Adquira agora | Adquira agora |
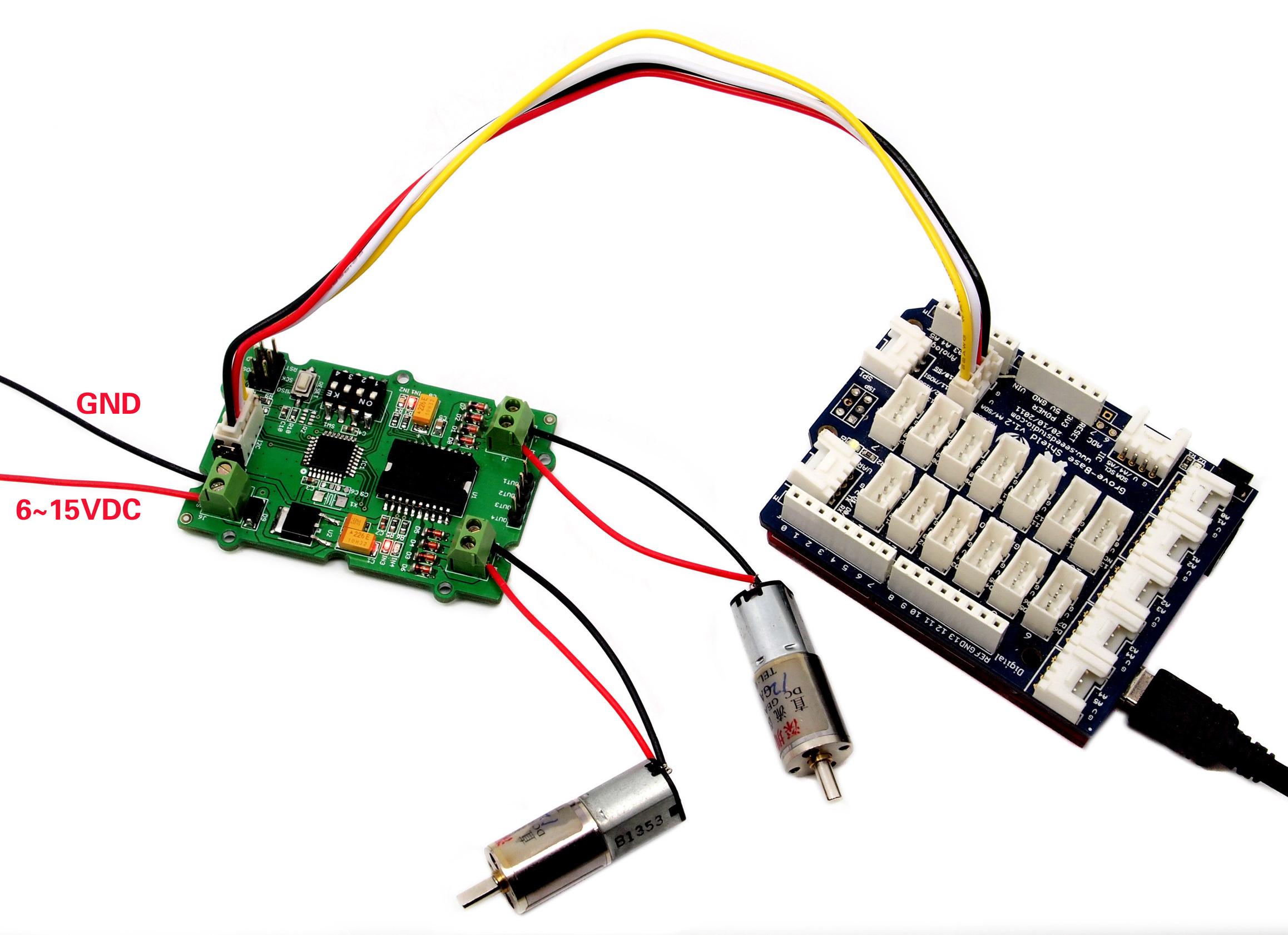
Conexão de hardware
-
Etapa 1 Conecte o Grove - I2C Motor Driver (L298P) à porta I2C do Grove-Base Shield.
-
Etapa 2 Conecte o Grove - Base Shield ao Seeeduino.
-
Etapa 3 Conecte o Seeeduino ao PC via um cabo USB.
Código de Software 1 - Motor CC
#include "Grove_I2C_Motor_Driver.h"
#define I2C_ADDRESS 0x0f /* default I2C address is 0x0f */
void setup() {
Serial.begin(9600);
Motor.begin(I2C_ADDRESS);
}
void loop() {
// Set speed of MOTOR1, Clockwise, speed: -100~100
Motor.speed(MOTOR1, 50);
// Set speed of MOTOR2, Anticlockwise
Motor.speed(MOTOR2, -70);
delay(2000);
// Change speed and direction of MOTOR1
Motor.speed(MOTOR1, -100);
// Change speed and direction of MOTOR2
Motor.speed(MOTOR2, 100);
delay(2000);
// Stop MOTOR1 and MOTOR2
Motor.stop(MOTOR1);
Motor.stop(MOTOR2);
delay(2000);
}
-
Etapa 1 Baixe a Biblioteca Grove_I2C_Motor_Driver_v1_3 do Github.
-
Etapa 2 Consulte How to install library para instalar a biblioteca para Arduino.
-
Etapa 3 Copie o código para a IDE Arduino e faça o upload. Se você não sabe como fazer o upload do código, verifique how to upload code.
Com a função speed(), você é capaz de acionar um motor na velocidade desejada.
-
motor_id representa qual motor usar. Você pode preencher MOTOR1 ou MOTOR2.
-
_speed representa a velocidade que você define para o motor. Você pode preencher -100~100 aqui. Quando _speed>0, o motor CC gira no sentido horário, enquanto _speed<0, o motor CC gira no sentido anti-horário. E quanto maior o valor absoluto de _speed, mais rápida será a velocidade do motor CC.
Com a função stop(), você é capaz de parar um motor CC em funcionamento.
- motor_id representa qual motor usar. Você pode preencher MOTOR1 ou MOTOR2.
Código de Software 2 - Motor de Passo
#include <Grove_I2C_Motor_Driver.h>
#define I2C_ADDRESS 0x0f // default I2C address is 0x0f
void setup() {
Serial.begin(9600);
Motor.begin(I2C_ADDRESS);
// Drive a stepper motor
// \_step: -1024~1024, when \_step>0, stepper motor runs clockwise; \_step<0, stepper
// motor runs anticlockwise; when \_step is 512, the stepper motor will run a complete
// turn; if step is 1024, the stepper motor will run 2 turns.
Motor.StepperRun(-1024);
Motor.StepperRun(512);
}
void loop() {
// your code here
}
Tomando o Motor de Passo 24BYJ48 como exemplo, a instalação de hardware é mostrada abaixo:
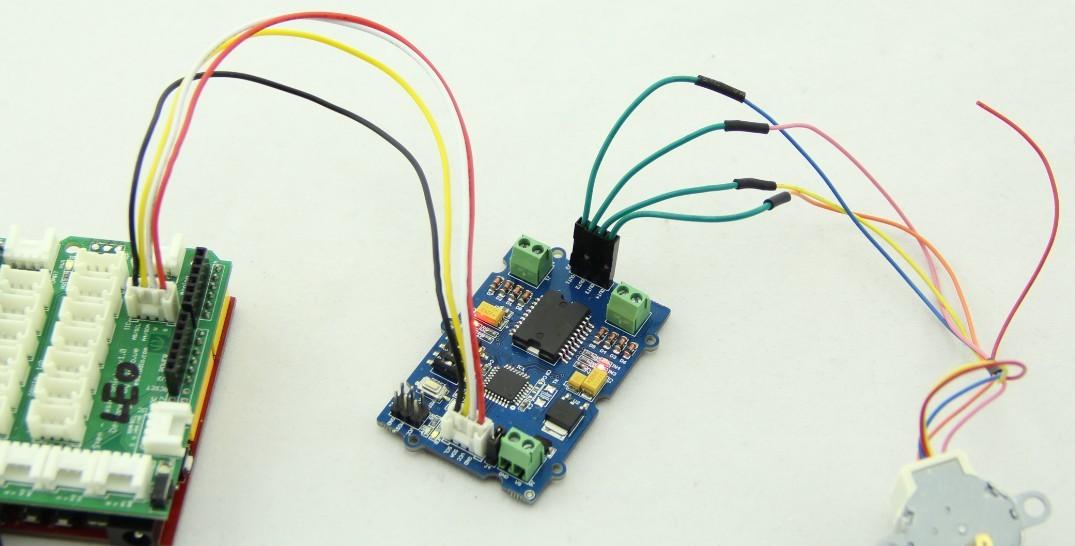
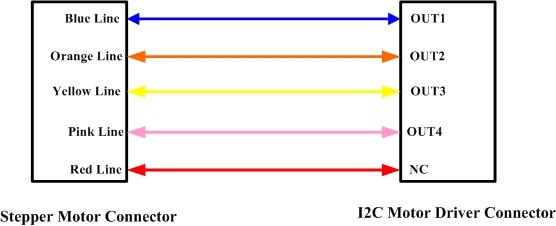
A conexão entre o Motor de Passo 24BYJ48 e o I2C Motor Driver é como mostrado abaixo:
- _step representa os passos que você define para o motor de passo executar. Você pode preencher -1024~1024. Quando _step>0, o motor de passo gira no sentido horário, enquanto _step<0, o motor de passo gira no sentido anti-horário. Quando _step é 512/-512, o motor de passo executará uma volta completa e se _step for 1024/-1024, o motor de passo executará 2 voltas. O motor de passo irá parar automaticamente depois que terminar seus passos.
Se você encontrar uma situação em que a frequência PWM não pode ser alterada e permanece fixa em 24Hz, é necessário atualizar o firmware usando um Jlink ou ST-link. Você pode encontrar o novo firmware aqui:
Para alterar a frequência PWM, use Motor.frequence(50) onde o valor é a frequência, até um máximo de 255Hz.
Visualizador Online do Esquemático
Recursos
-
[PDF] Datasheet STM32f030f4P6
-
[PDF] Datasheet L298P
-
[PDF] Esquemático de hardware
Suporte Técnico & Discussão sobre o Produto
Obrigado por escolher nossos produtos! Estamos aqui para oferecer a você diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.