Grove - IMU 9DOF v2.0

Grove - IMU 9DOF v2.0 é uma versão atualizada do Grove - IMU 9DOF v1.0 e é um módulo de rastreamento de movimento de 9 eixos de alto desempenho, baseado no MPU-9250. O MPU-9250 é um dispositivo integrado de rastreamento de movimento de 9 eixos projetado para os requisitos de baixo consumo de energia, baixo custo e alto desempenho de equipamentos de eletrônicos de consumo, incluindo smartphones, tablets e sensores vestíveis. O MPU-9250 possui três ADC de 16 bits para digitalizar as saídas do giroscópio, três ADC de 16 bits para digitalizar as saídas do acelerômetro e três ADC de 16 bits para digitalizar as saídas do magnetômetro.

Especificações
- Interface I2C/SPI
- I2C auxiliar
- Baixo consumo de energia
- I2C Modo Rápido de 400kHz para comunicação com todos os registradores
- Sensores de taxa angular digital de 3 eixos (giroscópios) com faixa de escala total programável pelo usuário de ±250, ±500, ±1000 e ±2000°/s
- Acelerômetro digital de 3 eixos com faixa de escala total programável de ±2g, ±4g, ±8g e ±16g
- Acelerômetro digital de 3 eixos com faixa de medição de escala total de ±4800μT
- Endereço I2C: 0x68
Se você quiser usar vários dispositivos I2C, consulte Software I2C.
Para mais detalhes sobre os módulos Grove, consulte Grove System
Plataformas Suportadas
| Arduino | Raspberry Pi |
|---|---|
|
|
As plataformas mencionadas acima como suportadas são uma indicação da compatibilidade de software ou teórica do módulo. Na maioria dos casos, fornecemos apenas biblioteca de software ou exemplos de código para a plataforma Arduino. Não é possível fornecer biblioteca de software / código de demonstração para todas as possíveis plataformas de MCU. Portanto, os usuários precisam escrever sua própria biblioteca de software.
Visão Geral de Hardware


① - Interface Grove, conecte ao I2C
② - Trilha de seleção I2C ou SPI (padrão é I2C), se quiser usar SPI, desconecte esta trilha
③ - Trilha de seleção de endereço, padrão conectado b e c o endereço é 0x68, se conectar b e a o endereço é 0x69, se quiser usar SPI, desconecte esta trilha de qualquer lado.
④ - Interface SPI
⑤ - Dados seriais mestre I2C auxiliar
⑥ - Clock serial mestre I2C auxiliar
⑦ - Saída digital de interrupção
Primeiros passos
Brincar com Arduino
Hardware
- Passo 1. Prepare os itens abaixo:
| Seeeduino V4.2 | Base Shield | Grove-IMU_9DOF_v2.0 |
|---|---|---|
|
|
|
| Adquira agora | Adquira agora | Adquira agora |



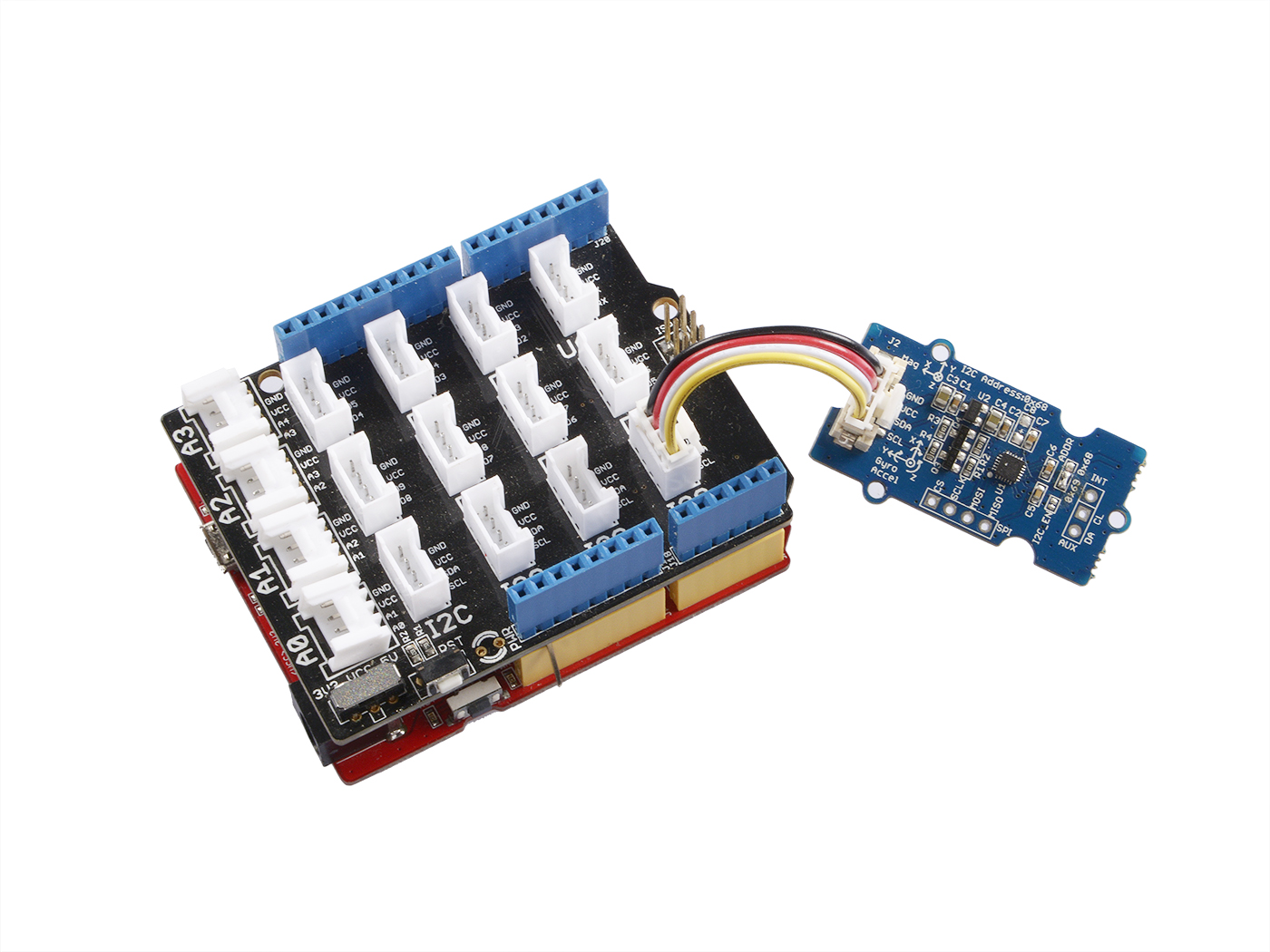
- Passo 2. Conecte o Grove-IMU_9DOF_v2.0 à porta I2C do Grove-Base Shield.
- Passo 3. Conecte o Grove - Base Shield ao Seeeduino.
- Passo 4. Conecte o Seeeduino ao PC por meio de um cabo USB.
Se não tivermos o Grove Base Shield, também podemos conectar este módulo diretamente ao Seeeduino como abaixo.
| Seeeduino_v4 | Grove-IMU_9DOF_v2.0 |
|---|---|
| 5V | VCC |
| GND | GND |
| SDA | SDA |
| SCL | SCL |
Software
Passo 1. Baixe a library do Github.
Passo 2. Consulte How to install library para instalar a biblioteca para Arduino.
Passo 3. Crie um novo sketch Arduino e cole o código abaixo nele ou abra o código diretamente pelo caminho: File -> Example ->IMU_9DOF_Demo_Compass_Calibrated->IMU_9DOF_Demo_Compass_Calibrated.
Aqui está a parte principal do código
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
Wire.begin();
// initialize serial communication
// (38400 chosen because it works as well at 8MHz as it does at 16MHz, but
// it's really up to you depending on your project)
Serial.begin(38400);
// initialize device
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// verify connection
Serial.println("Testing device connections...");
Serial.println(accelgyro.testConnection() ? "MPU9250 connection successful" : "MPU9250 connection failed");
delay(1000);
Serial.println(" ");
//Mxyz_init_calibrated ();
}
void loop()
{
getAccel_Data();
getGyro_Data();
getCompassDate_calibrated(); // compass data has been calibrated here
getHeading(); //before we use this function we should run 'getCompassDate_calibrated()' frist, so that we can get calibrated data ,then we can get correct angle .
getTiltHeading();
Serial.println("calibration parameter: ");
Serial.print(mx_centre);
Serial.print(" ");
Serial.print(my_centre);
Serial.print(" ");
Serial.println(mz_centre);
Serial.println(" ");
Serial.println("Acceleration(g) of X,Y,Z:");
Serial.print(Axyz[0]);
Serial.print(",");
Serial.print(Axyz[1]);
Serial.print(",");
Serial.println(Axyz[2]);
Serial.println("Gyro(degress/s) of X,Y,Z:");
Serial.print(Gxyz[0]);
Serial.print(",");
Serial.print(Gxyz[1]);
Serial.print(",");
Serial.println(Gxyz[2]);
Serial.println("Compass Value of X,Y,Z:");
Serial.print(Mxyz[0]);
Serial.print(",");
Serial.print(Mxyz[1]);
Serial.print(",");
Serial.println(Mxyz[2]);
Serial.println("The clockwise angle between the magnetic north and X-Axis:");
Serial.print(heading);
Serial.println(" ");
Serial.println("The clockwise angle between the magnetic north and the projection of the positive X-Axis in the horizontal plane:");
Serial.println(tiltheading);
Serial.println(" ");
Serial.println(" ");
Serial.println(" ");
delay(300);
}

Passo 4. Envie o código e, depois disso, você pode ver:
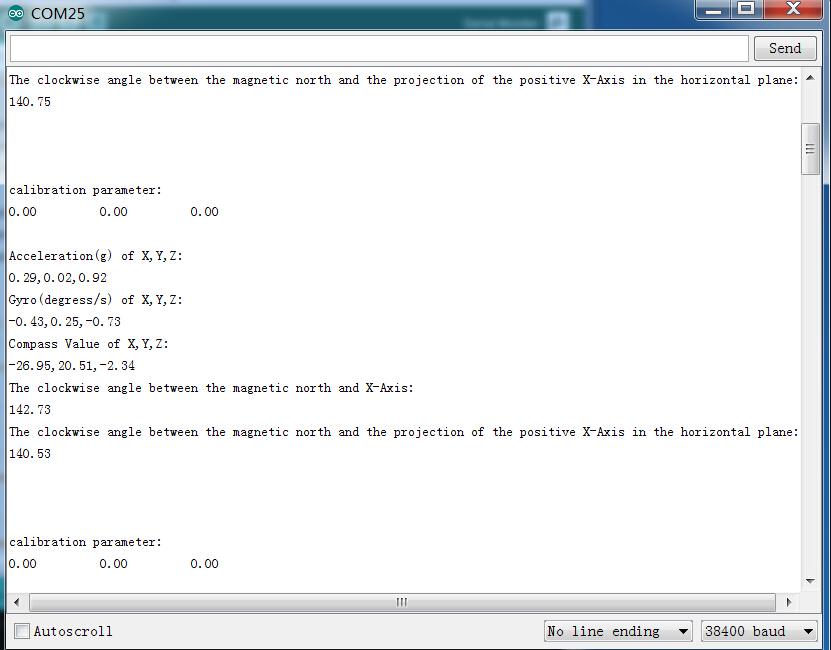
Em estado estático, o valor de saída do eixo Z é de aproximadamente 0,98 g, portanto você pode usar isso como referência para testar se o seu sensor está funcionando normalmente.
Referências
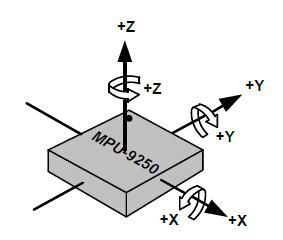
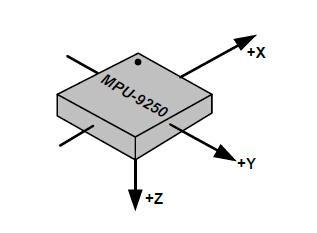
Orientação dos eixos
O diagrama abaixo mostra a orientação dos eixos de sensibilidade e a polaridade de rotação. Observe o identificador do pino 1 (•) na figura.
- Orientação dos eixos de sensibilidade e polaridade de rotação para acelerômetro e giroscópio
- Orientação dos eixos de sensibilidade para bússola
Visualizador de Esquemático Online
Recursos
- [Eagle&PDF] Grove - IMU 9DOF v2.0 arquivo Eagle
- [Library] Grove - IMU 9DOF v2.0 biblioteca
- [PDF] Folha de dados do MPU-9250
- [PDF] Mapa de registradores do MPU-9250
Projetos
**Teste de velocidade das funções do MPU9150 usando um LinkIt ONE **: Configurei este projeto com a única intenção de determinar o custo em milissegundos das funções padrão do MPU9150.
Suporte Técnico e Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para lhe oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.