Grove - Mouse Encoder

Grove - Mouse Encoder é um tipo de codificador rotativo incremental mecânico com dados de feedback da direção e da velocidade de rotação[1]. Ele possui uma interface Grove padrão que vai economizar muito trabalho de fiação e programação. Além disso, é bem adaptado para trabalho pesado e ambientes agressivos. Este produto pode ser aplicado em brinquedos, robôs e dispositivos de entrada de consumo.

Nota
A velocidade de rotação é projetada para ser inferior a 1000 rad/min (radianos por minuto).Características
- Versátil para diferentes ambientes.
- Bem adaptado para trabalho pesado e ambiente agressivo.
- Com ressaltos e uma sensação agradável.
- Interface Grove padrão para facilitar a programação e a fiação.
- Preciso e confiável.
Para mais detalhes sobre módulos Grove, consulte o Grove System
Aplicações
É versátil para diferentes aplicações em ambiente agressivo, como brinquedos, robótica e dispositivos de entrada de consumo.
Especificações
| Item | Min. | Típico | Máx. |
|---|---|---|---|
| Tensão de operação (V) | 3.3 | 5.5 | |
| Corrente de operação (mA) | 10 | 13 | |
| Ciclo de trabalho (velocidade constante) | 50% | ||
| Diferença de fase (velocidade constante) | π/4 | ||
| Pulsos por volta | 12 |
Notas
- Não há botão incluído na lista de produtos. Porque pensamos que isso tornará este codificador mais versátil para diferentes ambientes.
- Você pode encontrar o arquivo de dimensões em formato PDF, e pode personalizar um botão de acordo com as dimensões.
Dica
Você pode simplesmente usar uma ponta de chave de fenda hexagonal adequada se estiver apenas construindo um protótipo para o seu projeto.Visão geral de hardware
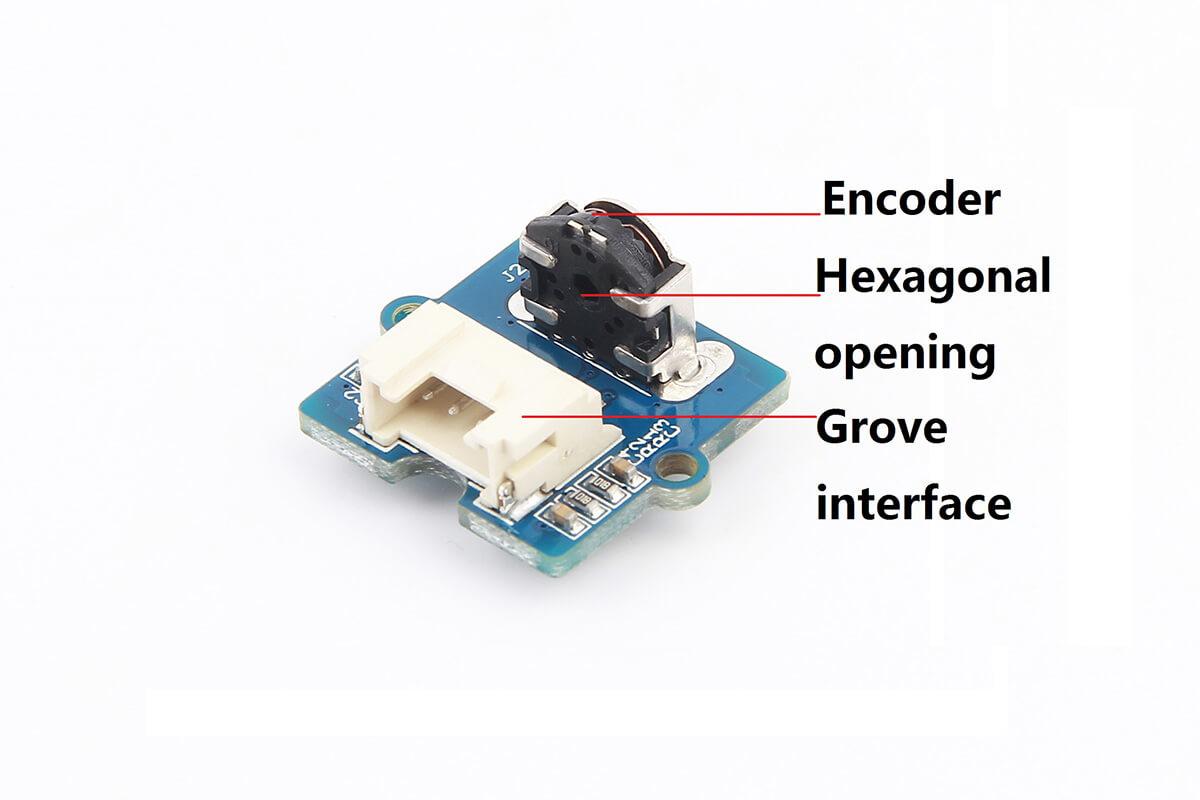
Interface Grove
Conecte a placa de controle principal, como a placa Seeeduino, com a placa de acionamento.
Abertura hexagonal
Uma abertura pela qual você passa um botão.
Lista de peças
| Nome da peça | Quantidade |
|---|---|
| Grove - Mouse Encoder (sem botão incluído) | 1 PC |
| Cabo Grove - Universal | 1 PC |
Primeiros passos
Esta seção mostrará como construir um ambiente de IDE para criar aplicações com o Grove - Mouse Encoder.
Notas
- O ciclo de trabalho será maior se a velocidade de rotação for baixa.
- A largura de pulso (PW) não será a mesma se a velocidade de rotação não for constante.
- A velocidade de rotação deve ser inferior a 1000 rad/min, caso contrário levará a uma largura de pulso de saída muito estreita ou poderá causar danos a este codificador.
- A tensão de saída será incerta (tensão alta ou baixa) em circunstâncias sem rotação, uma vez que a posição do pulso dentro deste codificador não é certa.
Demonstração básica
Esta demonstração mostra como detectar posição e direção.
Material necessário
- Seeeduino V4.2
- Base shield V2.0
- Cabo USB (tipo A para micro tipo B)
Conexões
Conecte os materiais como mostrado abaixo:

Código
/* Read Quadrature Encoder
* Connect Encoder to Pins encoder0PinA, encoder0PinB, and +5V.
*
* Sketch by max wolf / www.meso.net
* v. 0.1 - very basic functions - mw 20061220
*
*/
int val;
int encoder0PinA = 3;
int encoder0PinB = 4;
int encoder0Pos = 0;
int encoder0PinALast = LOW;
int n = LOW;
void setup() {
pinMode (encoder0PinA,INPUT);
pinMode (encoder0PinB,INPUT);
Serial.begin (115200);
}
void loop() {
n = digitalRead(encoder0PinA);
if ((encoder0PinALast == LOW) && (n == HIGH)) {
if (digitalRead(encoder0PinB) == LOW) {
encoder0Pos--;
} else {
encoder0Pos++;
}
Serial.println(encoder0Pos);
Serial.println ("/");
}
encoder0PinALast = n;
}
- Copie o código e grave-o na placa controladora.
- Abra a janela do monitor.
- Gire a ponta da chave de fenda para a esquerda ou para a direita para ver o que acontece.
A saída:

Visualizador de esquemático online
Recursos
Suporte técnico e discussão de produtos
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.