Sensor IMU do Wio Terminal
Nesta seção, detalharemos como os sensores funcionam, como obter dados de sensores usando o Wio Terminal e como enviar esses dados usando o Wio Terminal e o Grove - Wio-E5.
Atualizável para Sensores Industriais
Com o controlador S2110 e o registrador de dados S2100 da SenseCAP, você pode facilmente transformar o Grove em um sensor LoRaWAN®. A Seeed não só ajuda você na prototipagem, mas também oferece a possibilidade de expandir seu projeto com a série SenseCAP de robustos sensores industriais.
O gabinete com classificação IP66, a configuração via Bluetooth, a compatibilidade com a rede global LoRaWAN®, a bateria interna de 19 Ah e o poderoso suporte do APP fazem do SenseCAP S210x a melhor escolha para aplicações industriais. A série inclui sensores para umidade do solo, temperatura e umidade do ar, intensidade de luz, CO2, EC e uma estação meteorológica 8 em 1. Experimente o mais recente SenseCAP S210x para o seu próximo projeto industrial de sucesso.







Princípio de Funcionamento dos Sensores
Nesta seção, precisamos aprender a usar o sensor IMU integrado ao Wio Terminal.
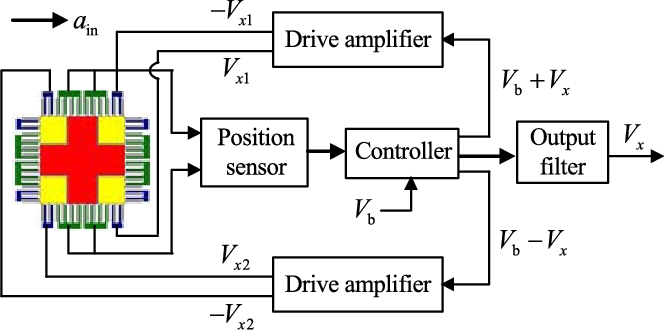
O sensor de aceleração LIS3DHTR é um sensor piezoelétrico, que converte a aceleração do objeto a ser medido em variação da tensão da unidade sensora e, em seguida, converte o valor da variação da unidade sensora em um valor de tensão por meio de um circuito de conversão, seguido da amplificação correspondente do sinal e do processo de filtragem para processar a grandeza analógica em um sinal de saída adequado e estável; nesse momento, o sinal de saída é um valor de tensão, que é finalmente convertido em um sinal digital por meio de um conversor ADC.
Para mais informações sobre o uso de sensores IMU consulte a referência aqui.
Materiais Necessários
 |  |
| Wio Terminal | Grove - Wio-E5 |
Preparação Preliminar
Conexão
Nesta rotina, precisamos conectar a um gateway LoRa® próximo com a ajuda do Grove LoRa® E5. Precisamos configurar a porta Grove no lado direito do Wio Terminal como uma porta serial por software para receber comandos AT.

Por que não usar a porta Grove do lado esquerdo?
A interface Grove do lado esquerdo é compatível com IIC, e usamos a interface IIC para a maioria dos sensores, portanto mantê-la livre é uma solução melhor.
Preparação de Software
Etapa 1. Você precisa instalar o software Arduino.

Etapa 2. Inicie o aplicativo Arduino.
Etapa 3. Adicione o Wio Terminal à Arduino IDE.
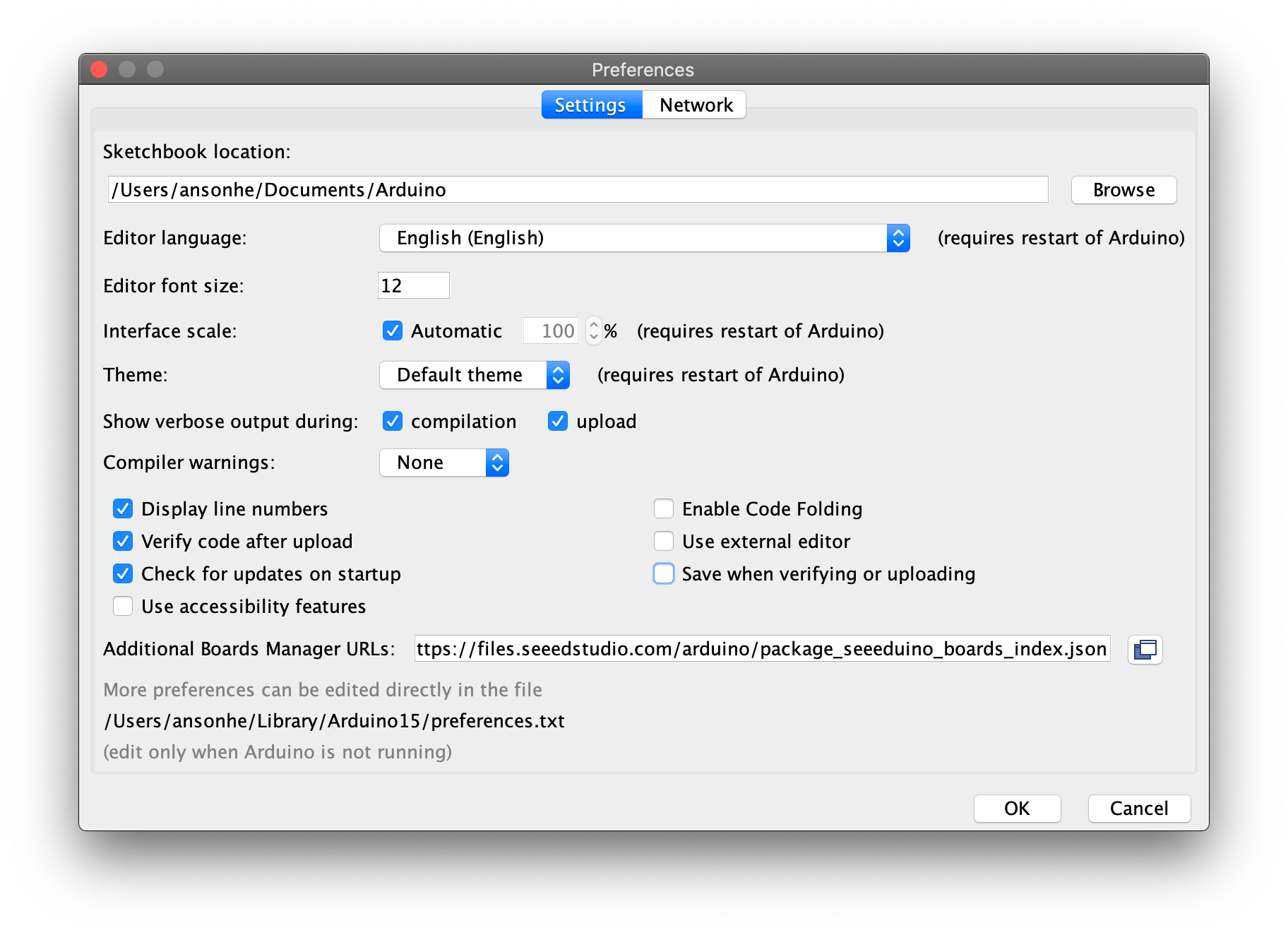
Abra sua Arduino IDE, clique em File > Preferences e copie a URL abaixo em Additional Boards Manager URLs:
https://files.seeedstudio.com/arduino/package_seeeduino_boards_index.json
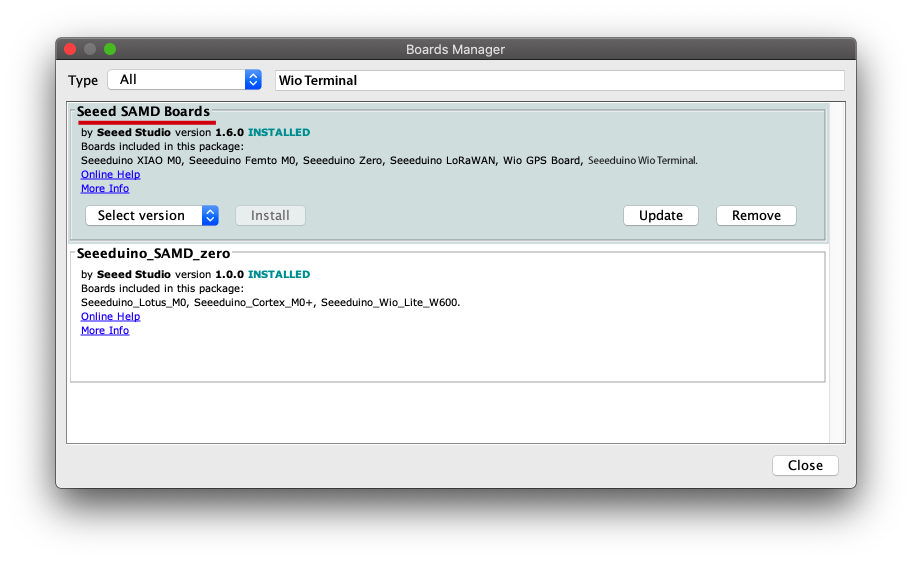
Clique em Tools > Board > Board Manager e pesquise Wio Terminal no Boards Manager.
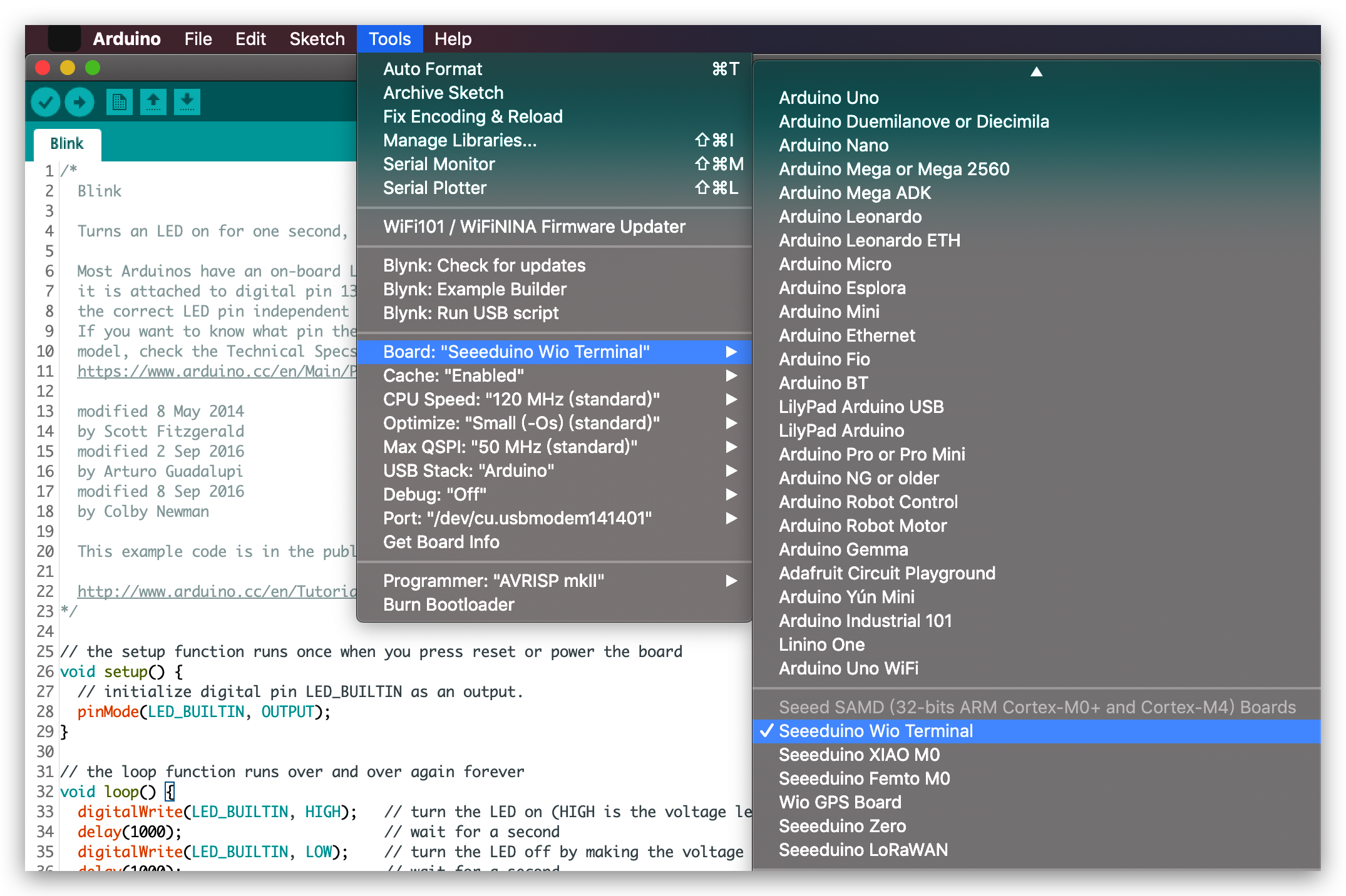
Etapa 4. Selecione sua placa e porta
Você precisará selecionar a entrada no menu Tools > Board que corresponde ao seu Arduino, selecionando o Wio Terminal.
Selecione o dispositivo serial da placa Wio Terminal no menu Tools -> Port. Este provavelmente será COM3 ou superior (COM1 e COM2 são geralmente reservadas para portas seriais de hardware). Para descobrir, você pode desconectar sua placa Wio Terminal e reabrir o menu; a entrada que desaparecer deve ser a placa Arduino. Reconecte a placa e selecione essa porta serial.
Para usuários de Mac, será algo como /dev/cu.usbmodem141401.
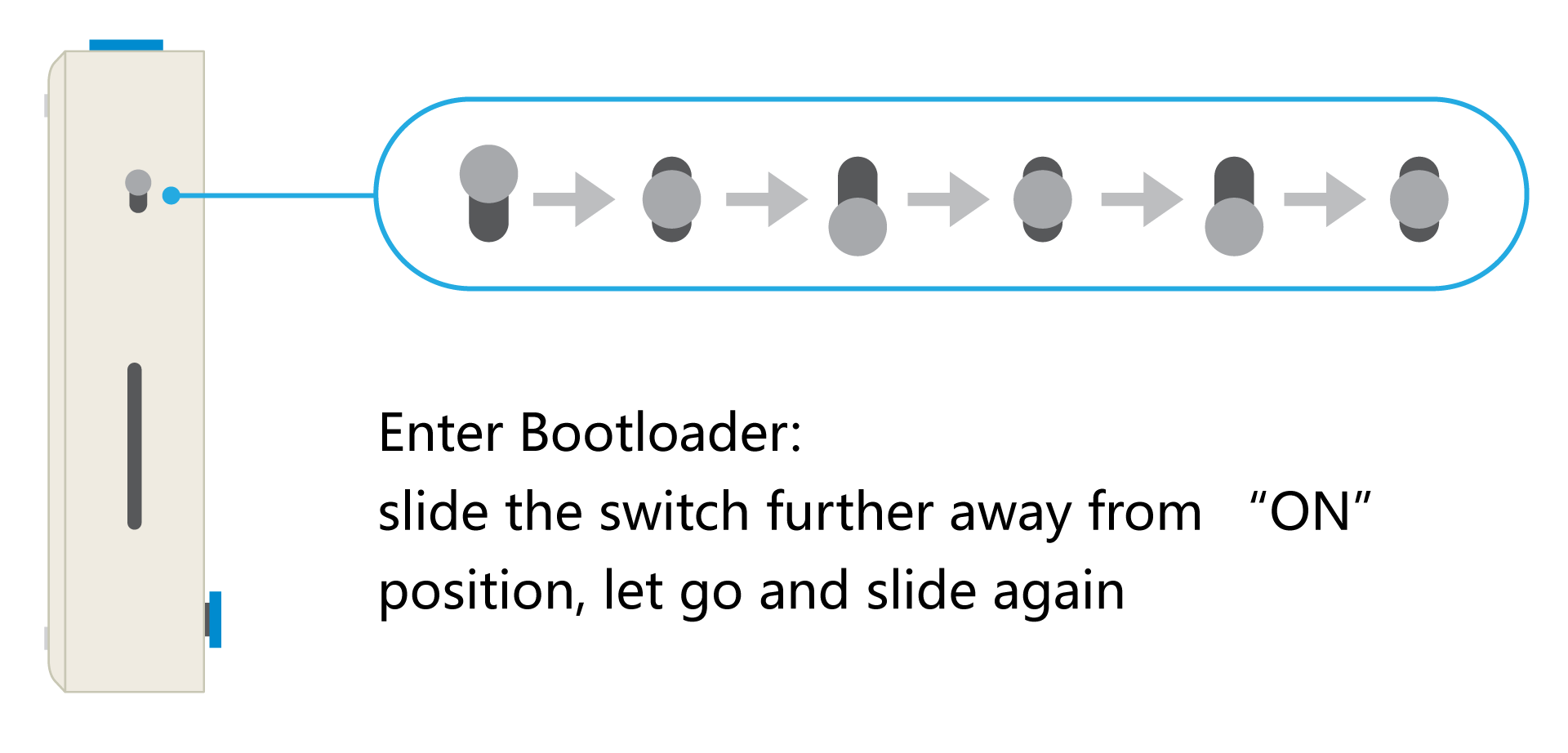
Se você não conseguir fazer o upload do sketch, na maioria das vezes é porque a Arduino IDE não conseguiu colocar o Wio Terminal em modo bootloader. (Porque o MCU foi interrompido ou o seu programa está manipulando o USB.) A solução é colocar o seu Wio Terminal em modo bootloader manualmente.
Etapa 5. Baixe a biblioteca Grove - Wio-E5
Visite os repositórios Disk91_LoRaE5 e baixe todo o repositório para o seu disco local.
Passo 6. Adicionando bibliotecas à IDE Arduino
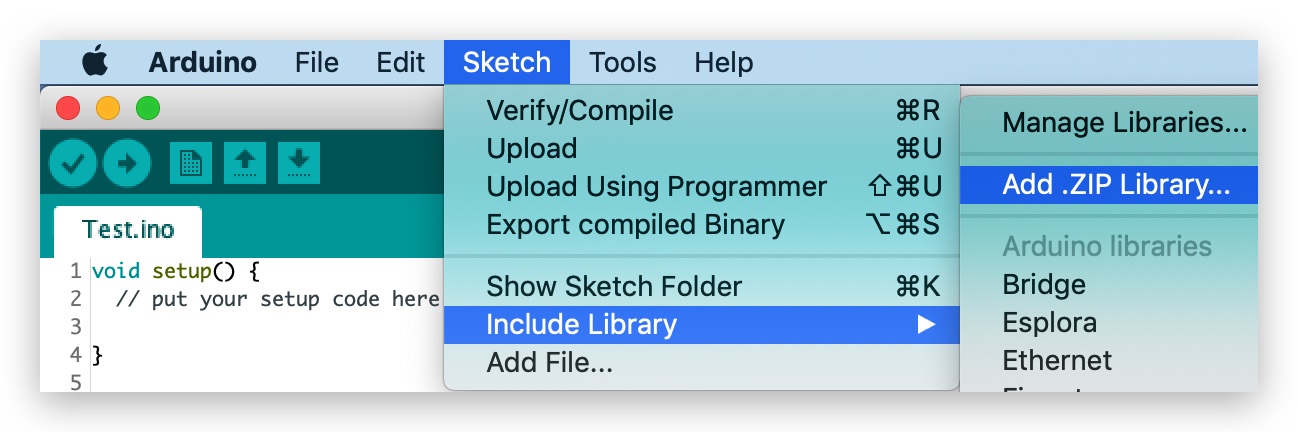
Agora, a biblioteca do Acelerômetro Digital de 3 Eixos pode ser instalada na IDE Arduino. Abra a IDE Arduino e clique em sketch -> Include Library -> Add .ZIP Library, e escolha o arquivo Disk91_LoRaE5 que você acabou de baixar.
Obter o valor do sensor IMU integrado do Wio Terminal
Passo 1. Baixar a biblioteca de código do IMU
Visite os repositórios Seeed_Arduino_LIS3DHTR e baixe todo o repositório para o seu disco local.
Passo 2. Adicionando bibliotecas à IDE Arduino
Agora, a biblioteca do Acelerômetro Digital de 3 Eixos pode ser instalada na IDE Arduino. Abra a IDE Arduino e clique em sketch -> Include Library -> Add .ZIP Library, e escolha o arquivo Seeed_Arduino_LIS3DHTR que você acabou de baixar.
Passo 3. Obter os dados de 3 eixos do sensor IMU
Este repositório demonstra como usar o sensor IMU integrado como um componente no Wio Terminal. Usando as funções da biblioteca getAccelerationX(), getAccelerationY() e getAccelerationZ(), você pode obter diretamente os deslocamentos dos eixos X, Y e Z do sensor IMU. Esses três valores podem ser números de ponto flutuante positivos ou negativos.
#include"LIS3DHTR.h"
LIS3DHTR<TwoWire> lis;
void setup() {
Serial.begin(115200);
lis.begin(Wire1);
if (!lis) {
Serial.println("ERROR");
while(1);
}
lis.setOutputDataRate(LIS3DHTR_DATARATE_25HZ); //Data output rate
lis.setFullScaleRange(LIS3DHTR_RANGE_2G); //Scale range set to 2g
}
void loop() {
float x_values, y_values, z_values;
x_values = lis.getAccelerationX();
y_values = lis.getAccelerationY();
z_values = lis.getAccelerationZ();
Serial.print("X: "); Serial.print(x_values);
Serial.print(" Y: "); Serial.print(y_values);
Serial.print(" Z: "); Serial.print(z_values);
Serial.println();
delay(50);
}
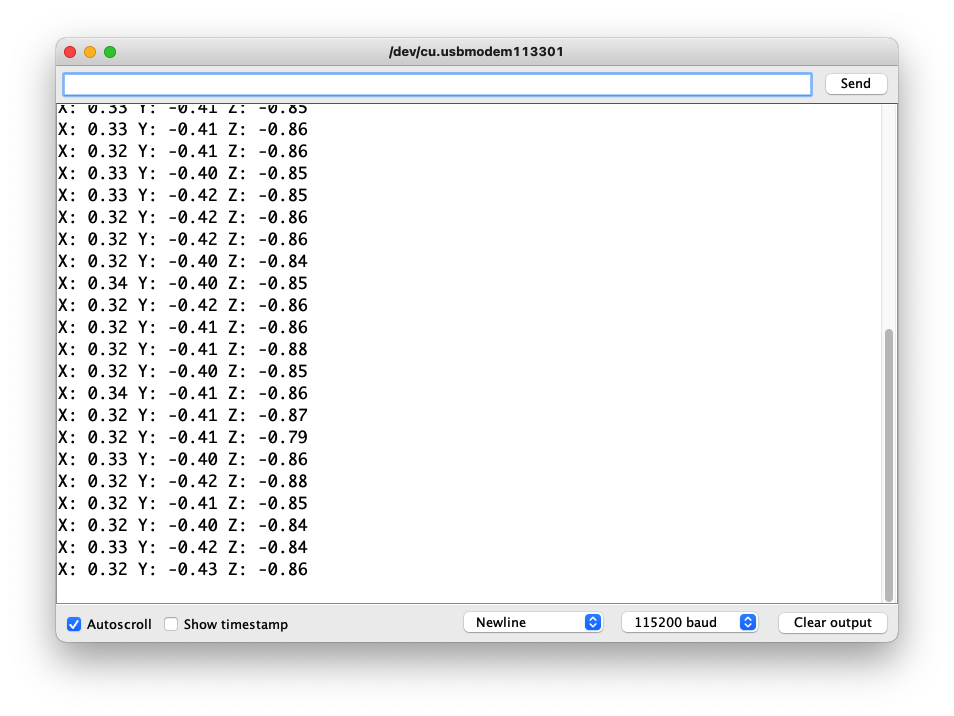
Abra o monitor serial da IDE Arduino, selecione a taxa de baud como 115200 e observe o resultado.
Enviar dados via Grove - Wio-E5
Combinamos o código anterior do Grove - Wio-E5 para conectar à rede LoRa®. Usando o comando AT é possível enviar o valor do sensor IMU para a rede LoRa®.
Como sabemos pelo código na seção acima para obter o valor do sensor IMU, os valores do sensor IMU são três números float separados que podem ter valores positivos e negativos e são precisos a duas casas decimais.
Devido às limitações de envio de dados, primeiro precisamos resolver o problema de converter números float em inteiros no lado de envio para garantir que os dados enviados sejam inteiros, portanto multiplicamos todos os três eixos de dados por 100.
Dessa forma, determinamos o conteúdo, o tamanho e o formato dos dados a serem enviados por meio do comando AT. Podemos muito bem configurar um array suficientemente grande, armazenar as strings que precisamos enviar no array e, finalmente, usar a função send_sync() para enviar o array.
O pseudocódigo para a ideia acima é aproximadamente o seguinte.
......
float x_values, y_values, z_values;
x_values = lis.getAccelerationX();
y_values = lis.getAccelerationY();
z_values = lis.getAccelerationZ();
int x = x_values*100;
int y = y_values*100;
int z = z_values*100;
static uint8_t data[6] = { 0x00 }; //Use the data[] to store the values of the sensors
data_decord(x, y, z, data);
if ( lorae5.send_sync( //Sending the sensor values out
8, // LoRaWan Port
data, // data array
sizeof(data), // size of the data
false, // we are not expecting a ack
7, // Spread Factor
14 // Tx Power in dBm
)
)
......
O resto do que precisamos fazer é usar a função begin() para inicializar o Grove - Wio-E5 e a função setup() para configurar as informações do triplete do Grove - Wio-E5. Quando enviarmos uma mensagem de dados usando a função send_sync(), tentaremos ingressar na LoRaWAN® ao mesmo tempo e, assim que isso acontecer, os dados serão enviados e informações como intensidade de sinal e endereço serão retornadas.
O exemplo de código completo pode ser encontrado aqui.
Não recomendamos que você faça o upload do código agora para ver os resultados, porque neste momento você ainda não configurou o Helium/TTN e obterá um resultado de "Join failed". Recomendamos que você faça o upload deste código depois de concluir o capítulo Connecting to Helium ou Connecting to TTN para completar o processo completo de envio de dados.
Depois que você tiver experimentado e entendido como o sensor IMU funciona e o formato dos dados, continue com o próximo passo do tutorial para ingressar na LoRaWAN®.
| Seção Helium | |
| Introdução ao Helium Neste capítulo, vamos apresentar os controles do console Helium que usamos para obter uma primeira impressão do console Helium. Ir para o capítulo > |
| Conectando ao Helium Esta seção descreve como configurar o Helium para que os dados do sensor possam ser enviados com sucesso e exibidos no Helium. Ir para o capítulo > |
| Seção TTN | |
| Introdução ao TTN Neste capítulo, vamos apresentar os controles do console TTN que usamos para obter uma primeira impressão do console TTN. Ir para o capítulo > |
| Conectando ao TTN Esta seção descreve como configurar o TTN para que os dados do sensor possam ser enviados com sucesso e exibidos no TTN. Ir para o capítulo > |




Suporte Técnico & Discussão de Produto
Agradecemos por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.
Declaração
- A marca LoRa® é uma marca registrada da Semtech Corporation ou de suas subsidiárias.
- LoRaWAN® é uma marca usada sob licença da LoRa Alliance®.