Primeiros Passos com o Mini AI Computer T906

Mini AI Computer T906 é construído com o módulo Jetson AGX Orin 32GB que oferece até 200TOPS de desempenho de IA, pronto para as cargas de trabalho de IA mais complexas na borda. Com Jetpack 5.0.2 pré-instalado, suportado pelos SDKs NVIDIA JetPack e DeepStream, TensorRT, RIVA, bibliotecas de software Issac e ferramentas de plataforma de IA líderes do ecossistema Seeed Edge AI, você pode desenvolver e implantar facilmente aplicações de IA para manufatura, entrega, varejo, cidades inteligentes e muito mais.
Você pode acessar uma rede de alta velocidade com portas ethernet de 10GbE e 1GbE no Mini AI Computer T906. Você pode habilitar até 10 streams para análise de vídeo.
A placa carrier integrada também deixa interfaces para o módulo de GPS, e M.2 Key M para expansão de SSD, M.2 Key B para o módulo Wi‑Fi, M.2 Key E para módulo 5G, Mini PCIe para módulo 4G.
Com 3x RS232 e protegido por excelente dissipação de calor e gabinete, o T906 é ideal para construir máquinas autônomas energeticamente eficientes
Com até 10 Gigabit Ethernet e operação estável de MTBF ultralonga, este supercomputador torna possíveis análises avançadas, ao mesmo tempo que oferece capacidade para lidar com múltiplos streams simultâneos de dezenas de câmeras IP. Ele possui capacidades sem fio Wi‑Fi e suporta configuração de módulos Bluetooth, 4G e 5G, bem como navegação por GPS.
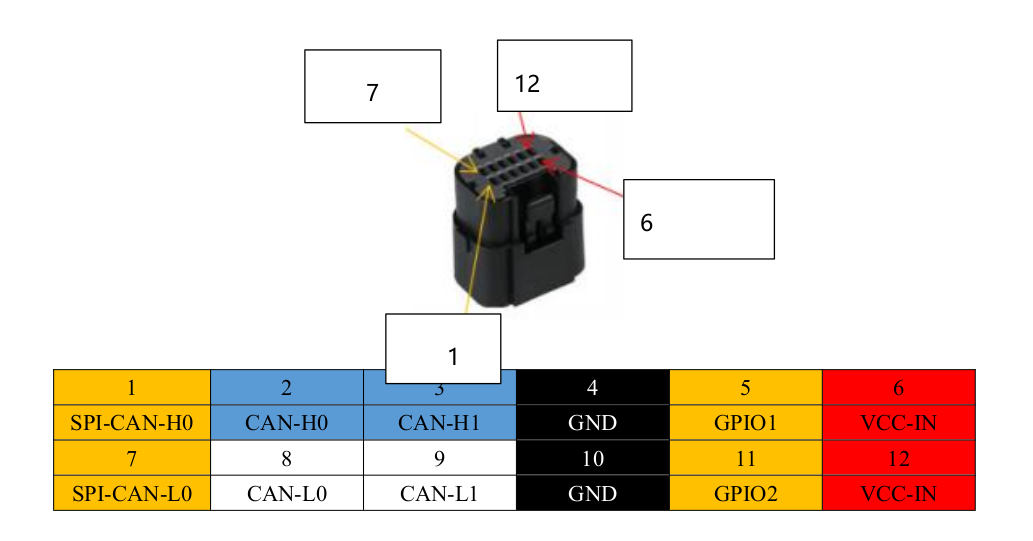
Equipado com um conector de nível veicular JEG onde há 3x CAN FD e 2x GPIO, você pode conectar múltiplos sensores de radar. Ele também possui um conector de câmera GMSL que você pode utilizar para construir um hub de sensores de câmera, uma unidade de controle ou uma unidade de transcodificação de vídeo. Esta caixa de IA de borda pode implementar direção autônoma, robôs móveis autônomos (AMR) ou teleoperação de veículos terrestres não tripulados.
Ele vem com um rico conjunto de interfaces industriais: 1x RS232 padrão, 1x RS232 para UART e 1x RS232 para o gatilho de sincronização de tempo (Time SYNC).
Coberto por uma liga de alumínio super forte e leve, é projetado como IP55 para um alto grau de proteção e é projetado como dissipação de calor passiva com duas ventoinhas onboard para uma forte função de refrigeração. Com Jetpack 5.0.2 pré-instalado, esta excelente plataforma de computação está pronta para ser implantada em carros de limpeza não tripulados, carros de entrega não tripulados, inspeção inteligente, AGV e outros campos de direção não tripulada.
Recursos
- É incorporado com NVIDIA® JETSON AGX ORIN™
- Suporta M.2 KEY M (PCIEX4 NVME 2280)
- Suporta M.2 KEY E (PCIEX1 2230)
- Suporta 8 câmeras GMSL2* (a placa adaptadora GMSL2 precisa ser adquirida separadamente)
- Suporta múltiplas interfaces (por exemplo, CAN/USB/Ethernet/Sinal Sincronizado/Serial/GPIO, etc.)
- Suporta módulo dual-band WIFI/Bluetooth/4G/5G
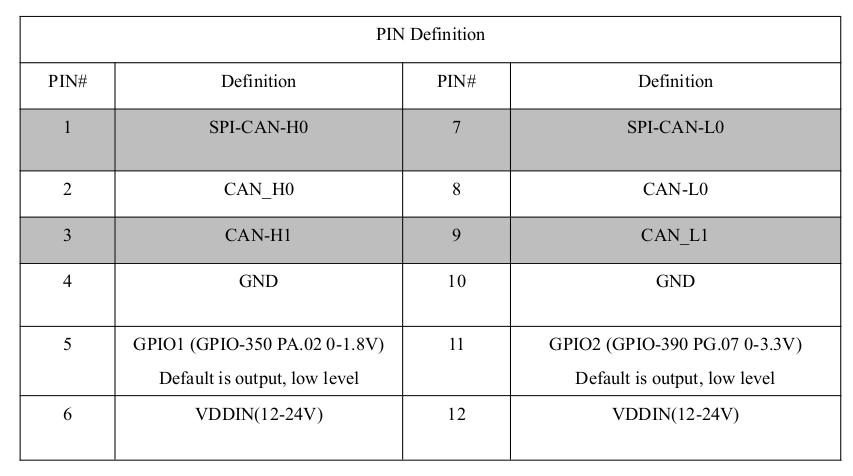
- Conector IO automotivo grau Japão JAE (1xPOWER, 3xCAN, 2xGPIO)
- Design com ventoinha e dissipação passiva
- Possui sistema ubuntu 20.04 e JETPACK SDKS integrados
Especificações
Módulo | Jetson AGX Orin 32GB |
Desempenho de IA | 200 TOPS |
CPU | CPU Arm® Cortex®-A78AE v8.2 64-bit de 8 núcleos 2MB L2 + 4MB L3 |
GPU | GPU NVIDIA arquitetura Ampere com 1792 núcleos e 56 Tensor Cores |
Memória | 32GB 256-bit LPDDR5 204.8GB/s |
Armazenamento | 64GB eMMC 5.1 1 x conector m.2 key m nvme 2280 |
Tela | 1*HDMI Tipo A |
Codificação de Vídeo | 1x 4K60 (H.265) 3x 4K30 (H.265) 6x 1080p60 (H.265) 12x 1080p30 (H.265) |
Decodificador de vídeo | 1x 8K30 (H.265) 2x 4K60 (H.265) 4x 4K30 (H.265) 9x 1080p60 (H.265) 18x 1080p30 (H.265) |
Ethernet Gigabit | 1x 10GbE 1x 1GbE |
Wi-Fi/Bluetooth | 1x M.2 KEY B (2230) com suporte a WiFi/Bluetooth 1x M.2 KEY E com suporte a 5G 1 mini PCIe para 4G (módulos não incluídos) |
GPS | Suporte a GPS (módulos não incluídos) |
USB | 4x Conector USB 3.0 Tipo A; 1x porta USB 2.0 TYPE-C para modo Dispositivo; 1x porta USB 2.0 TYPE-C para Depuração |
Interfaces industriais | 3x CAN (com chip CAN) |
2x GPIO | |
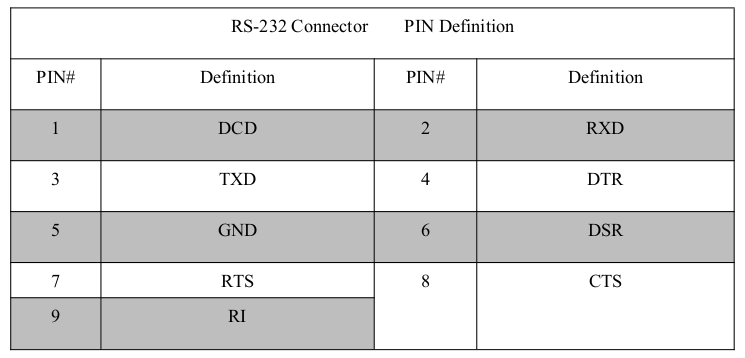
2x RS-232 D-SUB9 1 x SINCRONIZAÇÃO DE TEMPO (RS232) | |
Câmera | Conector de câmera GMSL 2 (compatível com GMSL1, placa adaptadora precisa ser adquirida separadamente) |
RTC | Conector RTC com Bateria Recarregável |
VENTOINHA | 2* VENTOINHA |
LED | 2x LED indicador de status |
Botão | Tecla de energia Tecla de reset Tecla de recuperação |
SO | JetPack 5.0.2 |
Alimentação | 9-36v JAE(MX23A12SF1) Potência típica 45W Máxima 75W |
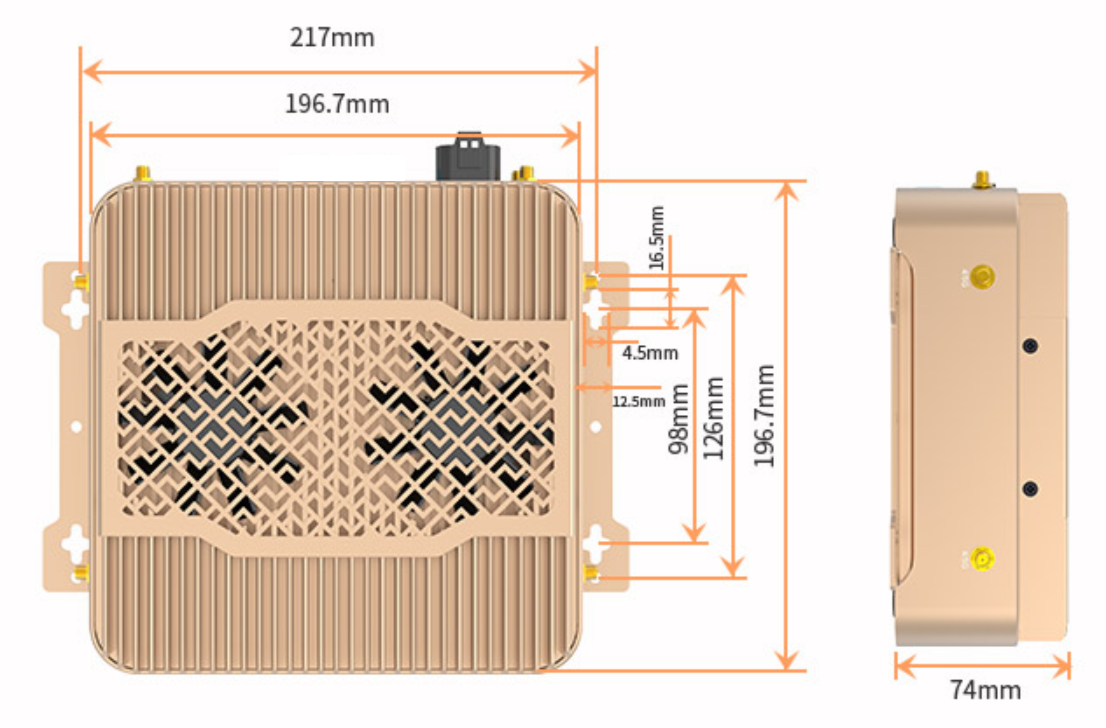
Mecânico | 196.719674mm 2.5kg -20℃-55℃ |
Visão Geral do Hardware


Dimensões
Descrição de Hardware
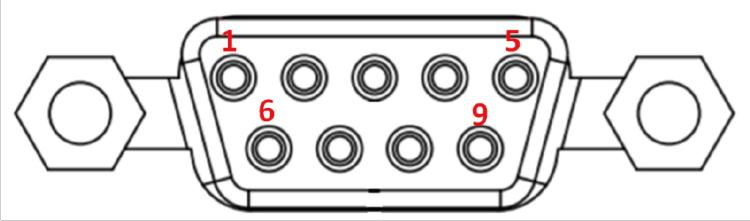
Porta serial
Interface Multifuncional
Gravar Sistema Operacional
!!! Note O Mini AI Computer T906 virá com Jetpack 5.0.2 pré-instalado no EMMC do módulo Jetson AGX Orin, o que significa que você pode começar diretamente a desenvolver sua própria aplicação com ele. Você pode pular para a próxima seção. Se você quiser continuar para gravar o SO neste dispositivo, é preciso observar que a placa-mãe deste sistema é projetada de forma personalizada, portanto os drivers relevantes precisam ser baixados e instalados.
Hardware Necessário
Você precisa preparar o seguinte hardware antes de começar
- Computador Host Linux com SO Ubuntu 18.04 ou Ubuntu 20.04
- Mini AI Computer T906
- Adaptador de energia (fornecido)
- Teclado e Mouse
- 1 x cabo USB Tipo-C (fornecido)
Configurar o Mini AI Computer T906 para o Modo de Recuperação
-
Passo 1. Conecte o Mini AI Computer T906 à fonte de alimentação do sistema;
-
Passo 2. Conecte o Mini AI Computer T906 ao host ubuntu usando um cabo usb tipo-c (uma extremidade conectada à porta OTG do Mini AI Computer T906 e a outra extremidade conectada ao soquete usb 3.0 do host ubuntu).
-
Passo 3. Ligue o sistema usando a fonte de alimentação configurada no Mini AI Computer T906.
-
Passo 4. Pressione o botão de recuperação e então pressione e segure o botão de reset no Mini AI Computer T906.
-
Passo 5. Solte o botão de reset após 2 segundos e, por fim, solte o botão de recuperação, neste ponto o T906 entra no modo de recuperação (você pode verificar se há um dispositivo
Nvidia Corpexecutando o comando:lsusbno Host Ubuntu.
!!! Note Ao entrar no modo de recuperação usb, o sistema não será inicializado e não haverá saída de informações de depuração pela porta serial.
Baixar e Gravar o SO no Mini AI Computer T906
-
Passo 1. Baixe os arquivos de imagem do sistema do nosso Repositório Source Forge
-
Passo 2. Execute o seguinte comando no
Terminaldo seu Computador Host Ubuntu:
#extract archive
sudo tar -zxvf T906_JP5.0.2.tar.gz
#Enter the L4T folder
cd Linux_for_Tegra
#Start Flashing OS
sudo . /flash.sh jetson-agx-orin-devkit mmcblk0p1
Você deverá ver uma mensagem semelhante na saída do Terminal.
Periféricos
Conexão Wi-Fi
!!! Note O Mini AI Computer T906 não vem com módulo WiFi.
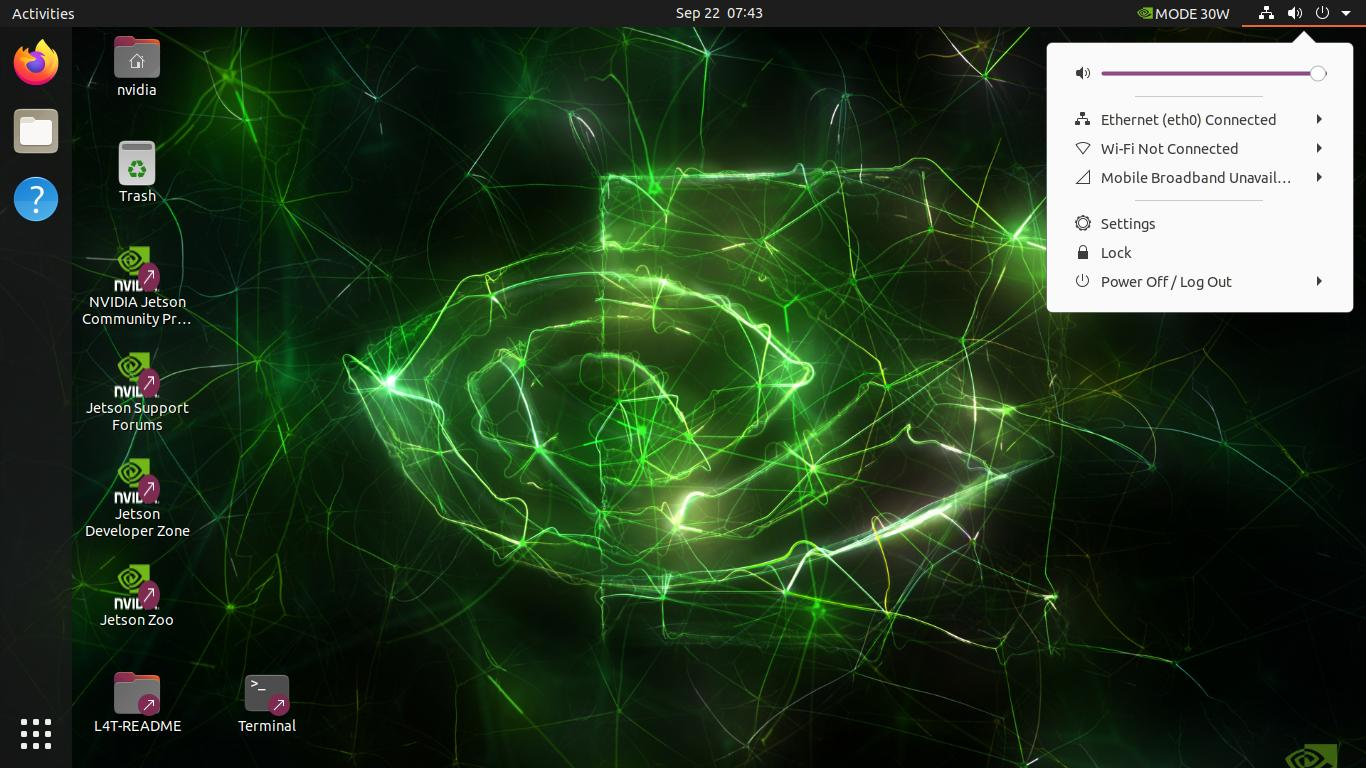
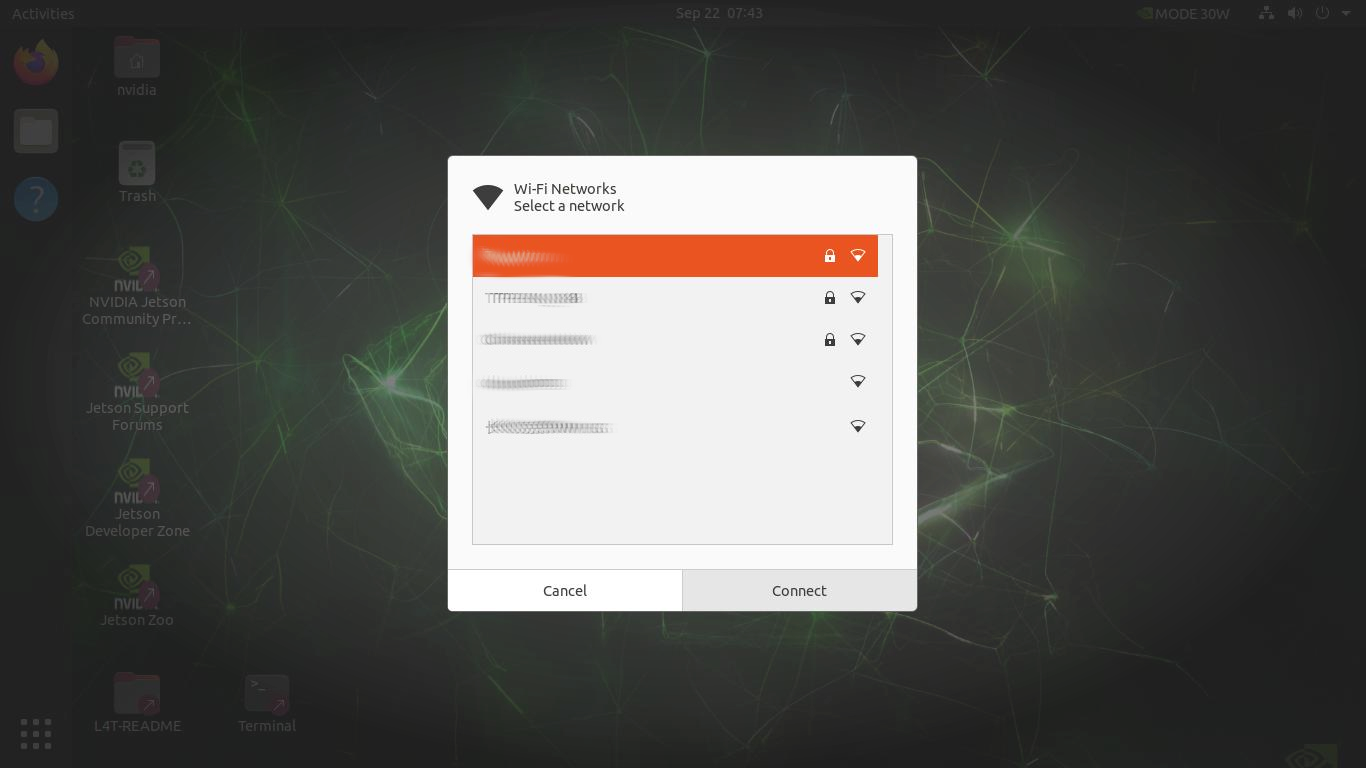
- Passo 1. Após iniciar o sistema, por favor clique no ícone de rede mostrado pela seta, as configurações de rede irão aparecer.
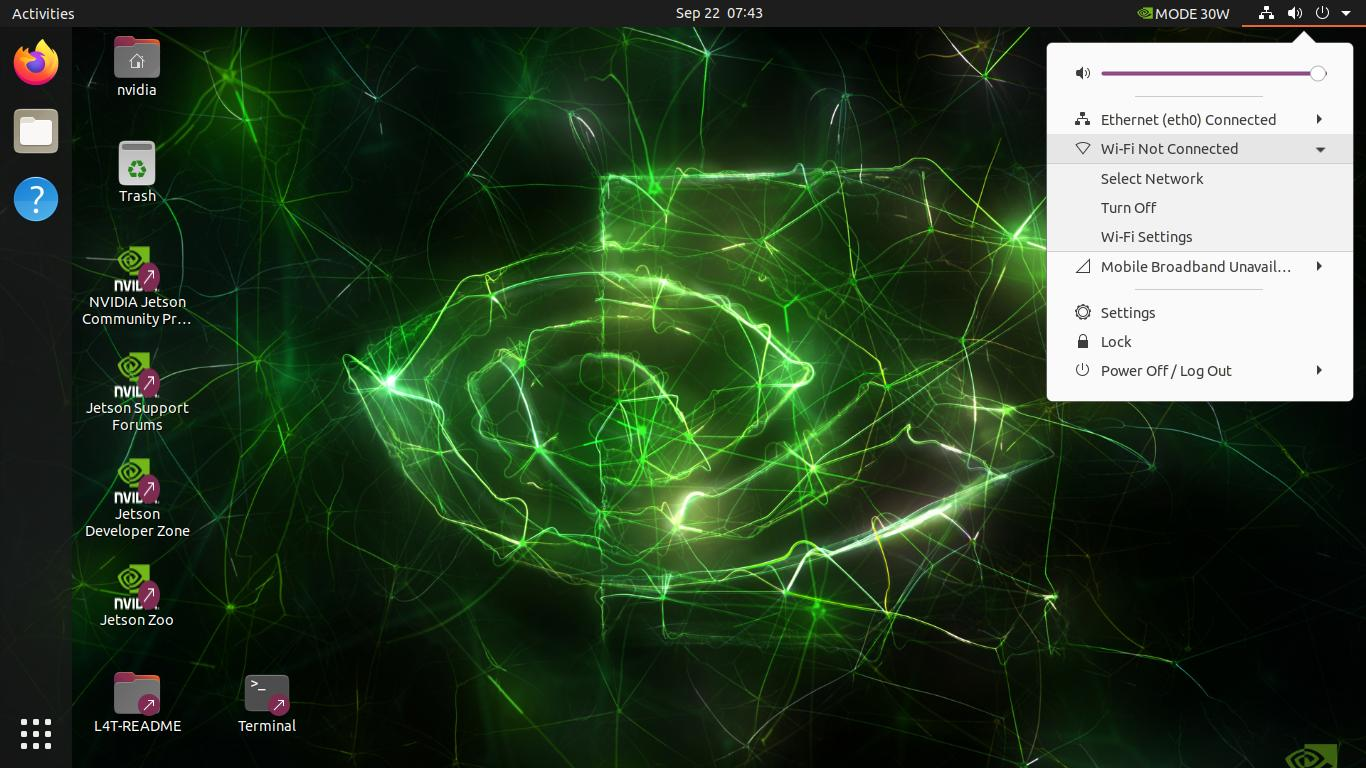
- Passo 2. Na seção Wi-Fi, selecione e clique em
Select Network.
- Passo 3. Selecione sua rede Wi-Fi na janela de prompt e clique em
connect.
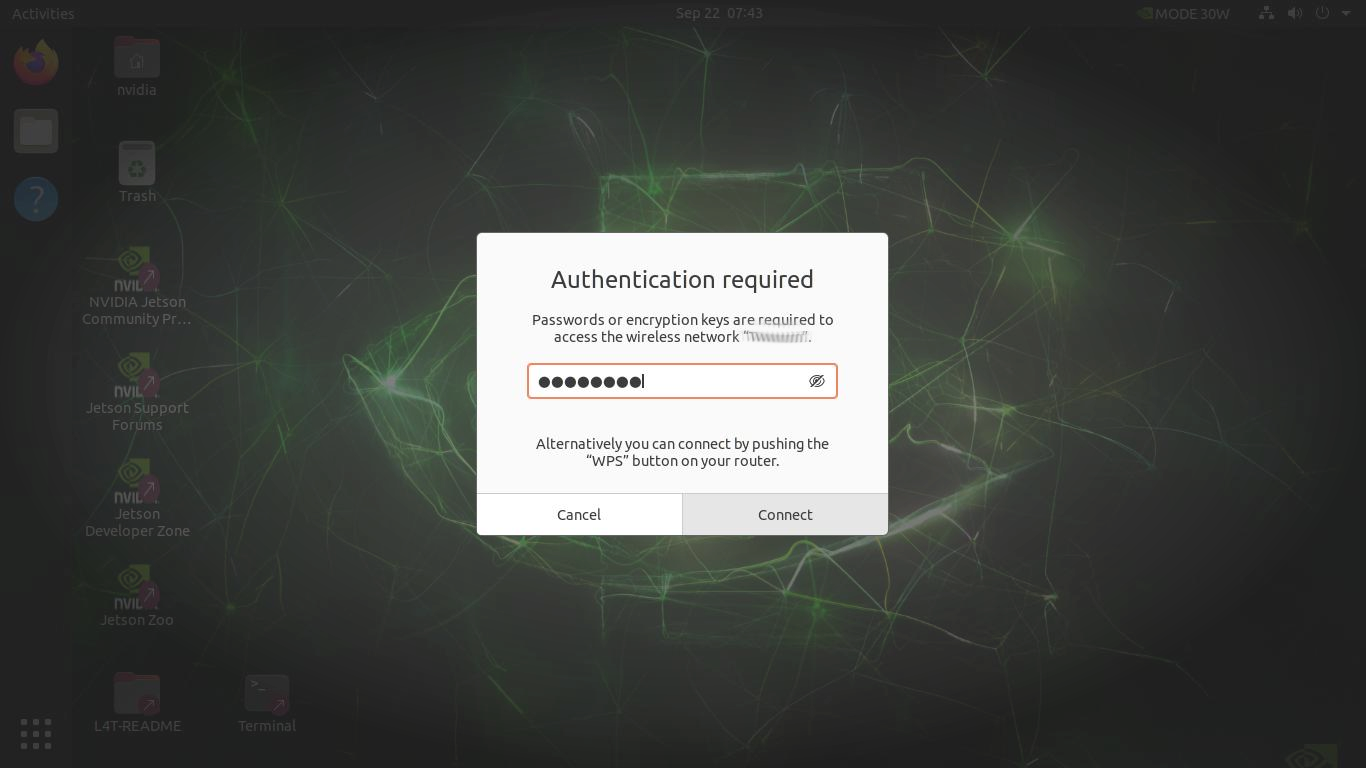
- Passo 4. Digite a Senha do Wi-Fi na janela
Authentication required.
Rede Dial-up 4G
!!! Note O Mini AI Computer T906 não vem com módulo 4G, o procedimento a seguir é realizado com o Módulo 4G Neoway N720.
- Passo 1. Baixe os drivers do Módulo 4G e descompacte o pacote, depois copie o driver para
/etc/ppp/peersusando oTerminal:
wget -o- https://files.seeedstudio.com/wiki/AI_Computer_T906/4g_dail.zip
unzip 4g_dail.zip
sudo cp -f 4g_dail_script/* /etc/ppp/peers
- Passo 2. Vá para o diretório /etc/ppp/peers e encontre o script n720-ppp-dial.sh. Na primeira vez que você executá-lo, será necessário conceder permissões de execução, como a seguir.
cd /etc/ppp/peers
sudo chmod +x n720-ppp-dial.sh
sudo ./n720-ppp-dial.sh
Se você precisar desligar a conexão dial-up, pode executar o script ppp-kill.sh para encerrá-la.
cd /etc/ppp/peers
#turn off dial-up
sudo ./ppp-kill.sh
-
Passo 3. Se você quiser implementar o recurso de conexão automática 4G, precisa configurar o script de inicialização rc.local para aumentar o número de aplicações na inicialização do sistema.
-
Passo 3-1. Adicionar rc-local.service
#create a system service
sudo ln -fs /lib/systemd/system/rc-local.service /etc/systemd/system/rc-local.service
#edit the service file
sudo vi /etc/systemd/system/rc-local.service
No editor vi, digite i e então digite o seguinte:
[Install]
WantedBy=multi-user.target
Alias=rc-local.service
e então digite :wq para salvar e sair.
- Passo 3-2. Escreva o script rc.local
sudo touch /etc/rc.local
sudo chmod 755 /etc/rc.local
sudo vi /etc/rc.local
No editor vi, digite i e então use control+shift+V ou cole o seguinte script:
#!/bin/bash
LOG_DIR=/var/log/4glog
mkdir -p $LOG_DIR
#4g auto dial if register on network. sleep 30s wait for 4g module prepared
TIME=`date +%Y%m%d%H%M`
echo $TIME >> $LOG_DIR/ppp-dial.log
echo "Auto dial" >> $LOG_DIR/ppp-dial.log
nohup /etc/ppp/peers/n720-ppp-dial.sh >> $LOG_DIR/ppp-dial.log &
sleep 10
#Set default gateway
def_gw=`/sbin/ifconfig ppp0|grep destination|grep -v 127.0.0.1|grep -v inet6 | awk '{print $6}' | tr -d "addr:"`
#`route -n | grep ppp0 | grep UG | awk '{print $2}'`
echo $def_gw >> $LOG_DIR/ppp-dial.log
if [ -n "$def_gw" ]; then
#Set default gateway using ppp0/4G
sudo route add default gw $def_gw
else
sleep 10
def_gw=`/sbin/ifconfig ppp0|grep destination|grep -v 127.0.0.1|grep -v inet6 | awk '{print $6}' | tr -d "addr:"`
if [ -n "$def_gw" ]; then
sudo route add default gw $def_gw
fi
fi
#Get ppp0 IP
fourg_ip=`/sbin/ifconfig ppp0|grep inet|grep -v 127.0.0.1|grep -v inet6 | awk '{print $2}' | tr -d "addr:"`
if [ -n "$fourg_ip" ]; then
echo $fourg_ip >> $LOG_DIR/ppp-dial.log
else
sleep 15
if [ -n "$fourg_ip" ]; then
echo $fourg_ip >> $LOG_DIR/ppp-dial.log
else
echo "4G no ip $fourg_ip" >> $LOG_DIR/ppp-dial.log
echo $TIME"-Kill pppd and redial" >> $LOG_DIR/ppp-kill.log
nohup /etc/ppp/peers/ppp-kill.sh >> $LOG_DIR/ppp-kill.log &
fi
fi
#end 4g auto dial
#Running maxn mode
/usr/bin/jetson_clocks
exit 0
Agora você pode abrir uma página da web para testar e ver se a rede 4G está conectada.
Teste de GPIO
- Passo 1. Instale a biblioteca gpio do python
git clone https://github.com/vitiral/gpio.git
cd gpio/
sudo python3 setup.py install
- Passo 2. Escreva um script de teste em python
import time
import gpio
tst_gpio_pin = 326 #326 correspond to T906's GPIO2
#tst_gpio_pin = 350 #350 correspond to T906's GPIO1
gpio.setup(tst_gpio_pin, gpio.OUT)
gpio.set(tst_gpio_pin, 0)
print("Starting now! Press CTRL+C to exit")
try:
while True:
gpio.set(tst_gpio_pin, 1)
print("TEST High.")
time.sleep(5)
gpio.set(tst_gpio_pin, 0)
print("TEST Low")
time.sleep(5)
finally:
gpio.cleanup()
- Passo 3. você também pode verificar se o pino GPIO está em HI ou LO por:
sudo cat /sys/kernel/debug/gpio| grep '326'
Uso do GPS
!!!Note Esta é a etapa para teste com o módulo GPS. O procedimento e o software a seguir são para o módulo GPS da série HX-26-GN. Observe que o módulo GPS não está incluído no produto padrão, você precisa fornecê-lo por conta própria.
- Passo 1. Por favor, instale o módulo GPS e conecte a antena GPS à porta GPS.

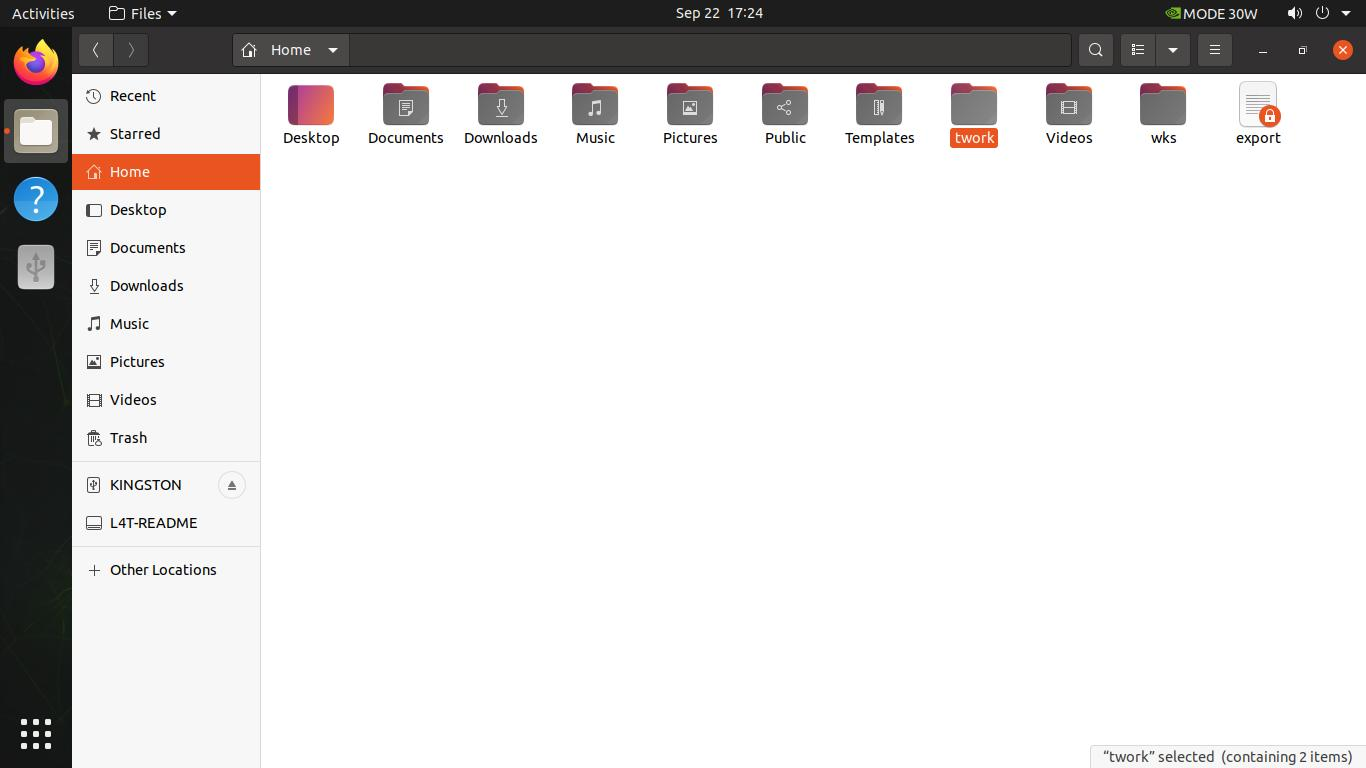
- Passo 2. Após inicializar o sistema, você pode encontrar a pasta twork na localização home, clique duas vezes nela e clique com o botão direito do mouse e selecione
Open in Terminal.
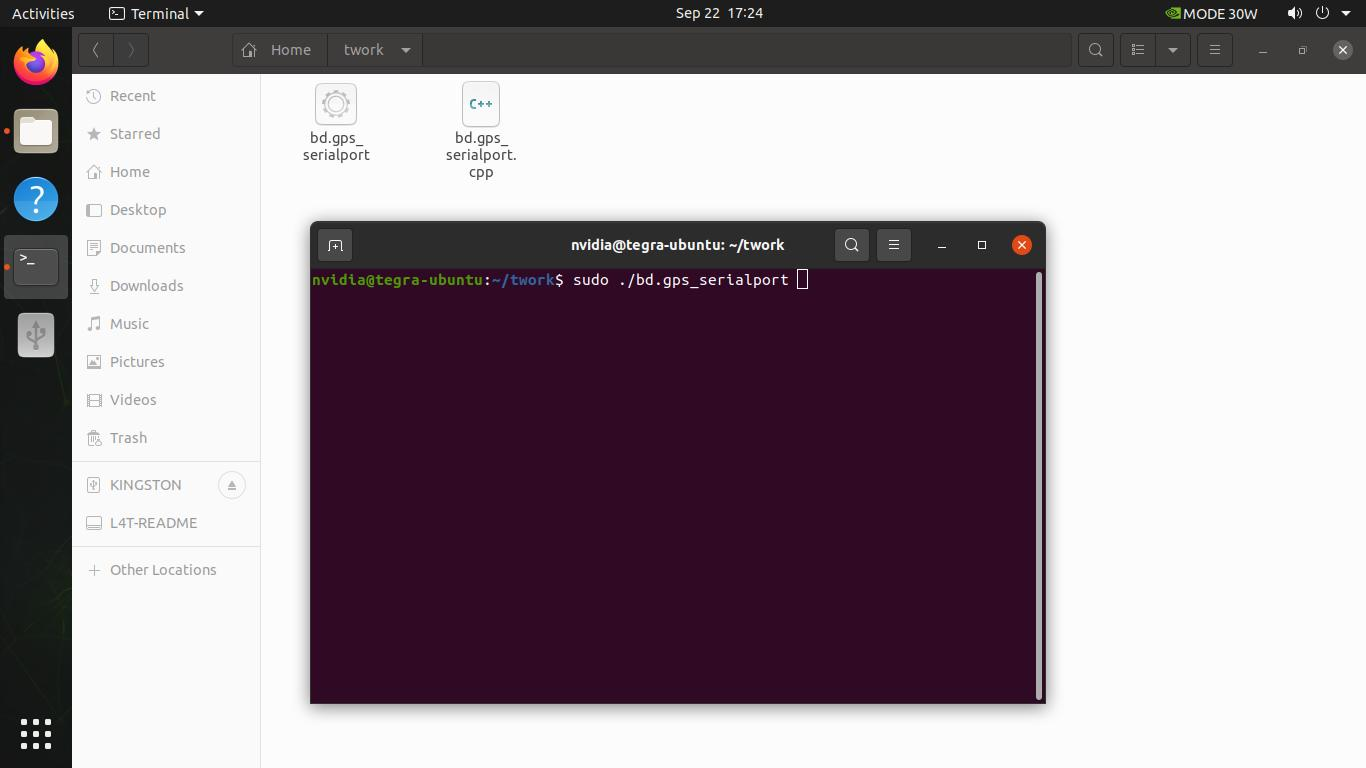
- Passo 3. Na janela do
Terminal, por favor, digite o seguinte comando:
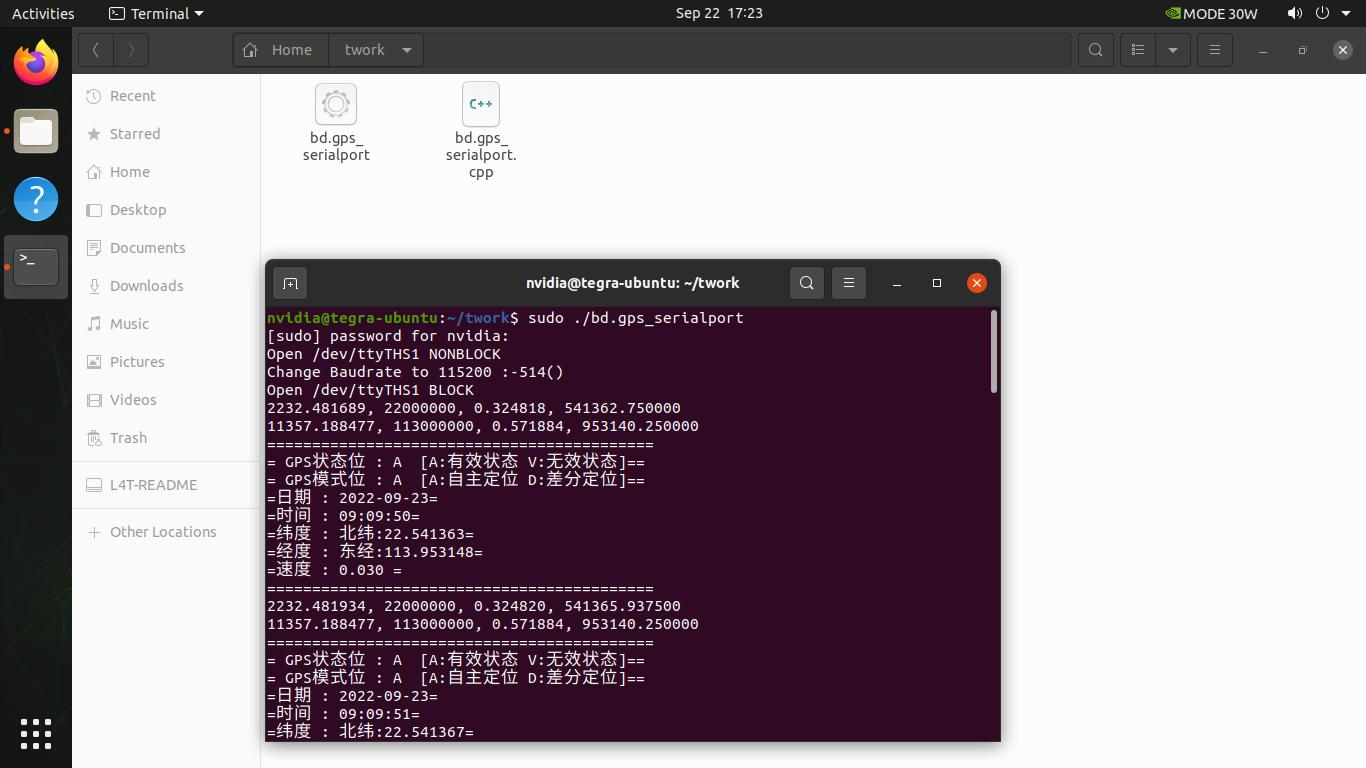
sudo ./bd.gps_serialport
o resultado correto deve ser semelhante a:
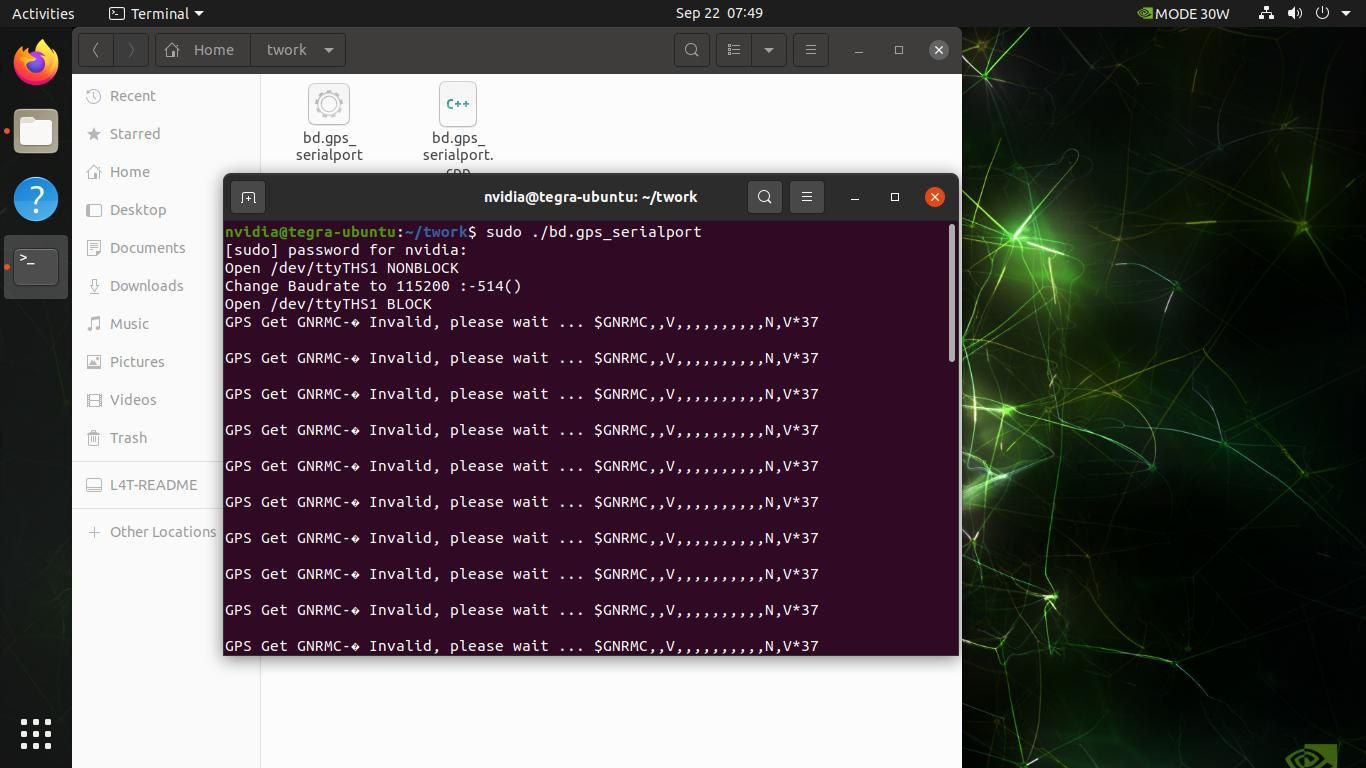
se você vir a seguinte saída, significa que a localização não foi bem-sucedida, o que pode indicar que o sinal está fraco para travar a localização. Por favor, vá para uma área aberta para expor a unidade e obter mais sinais para travar a posição.
Usando SSD NVMe como unidade raiz do sistema (rootfs)
!!!Note Esta é a etapa para definir o SSD NVMe como disco do sistema para expandir o tamanho de armazenamento do rootfs, juntamente com o EMMC ou o Cartão SD como partição de boot do sistema. Observe que o SSD NVMe não está incluído no produto padrão, você precisa fornecê-lo por conta própria.
-
Passo 1. Instale o SSD
Siga as etapas em Hardware Instructions para instalar o SSD para reComputer.
-
Passo 2. Preparar o SSD
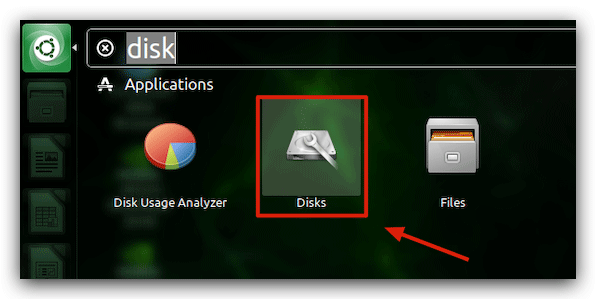
Use o atalho
Ctrl+Fou clique no ícone do Ubuntu no canto superior esquerdo para procurar por Disks e abra a ferramenta Disks que vem com o Ubuntu 18.04.
Selecione seu SSD no lado esquerdo e então selecione Format Disk no canto superior direito sob a barra de menu.
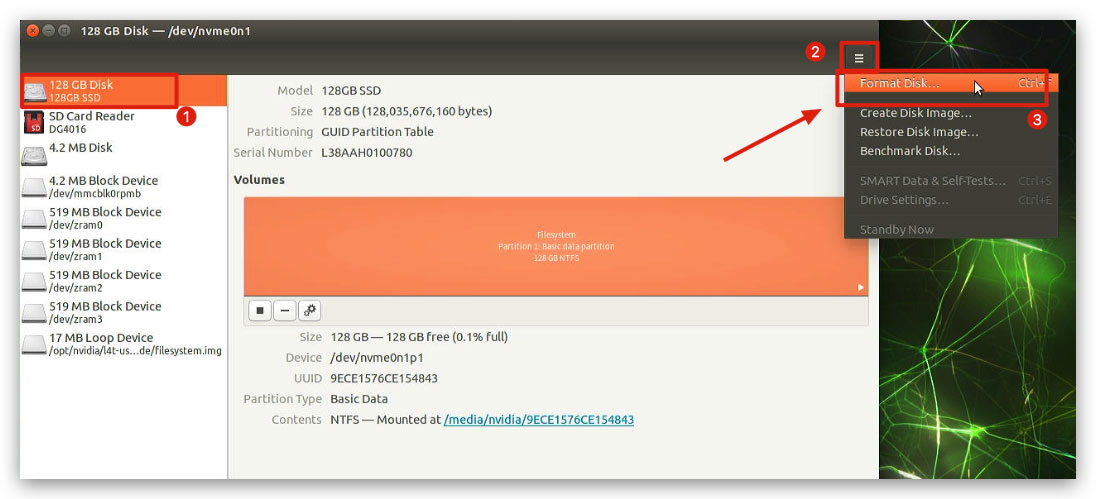
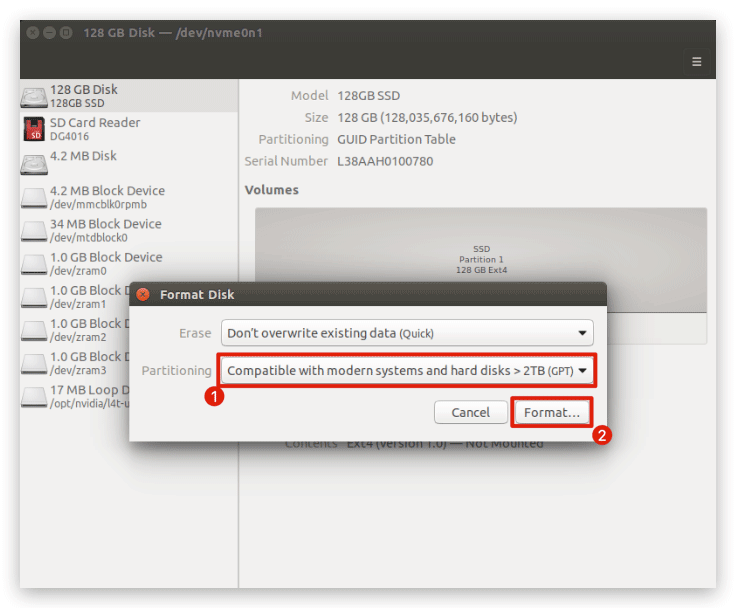
Formate seu SSD para o formato GPT. Uma janela pop-up aparecerá pedindo que você confirme e insira sua senha de usuário.
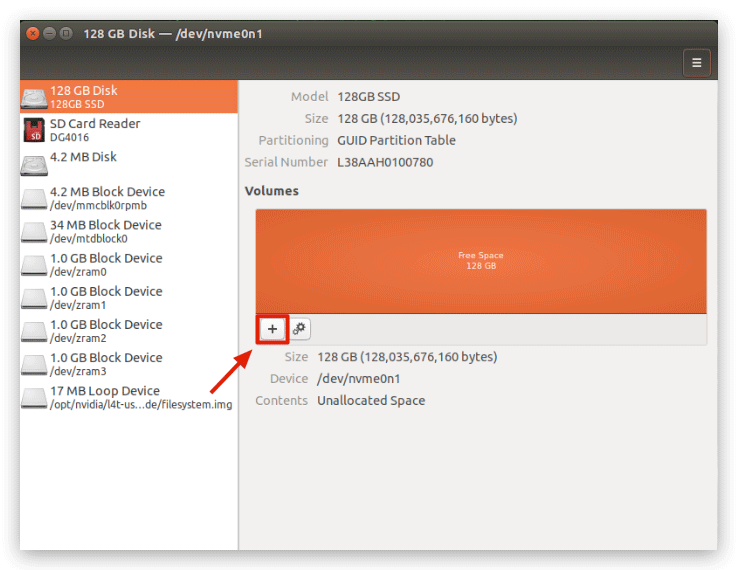
Em seguida, clicamos no + do meio para adicionar um caractere de disco.
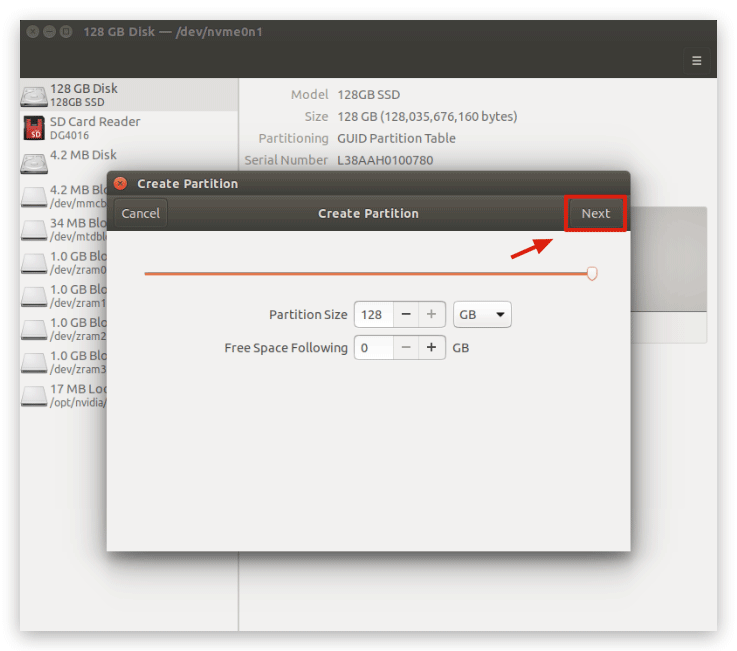
Clique em "Next".
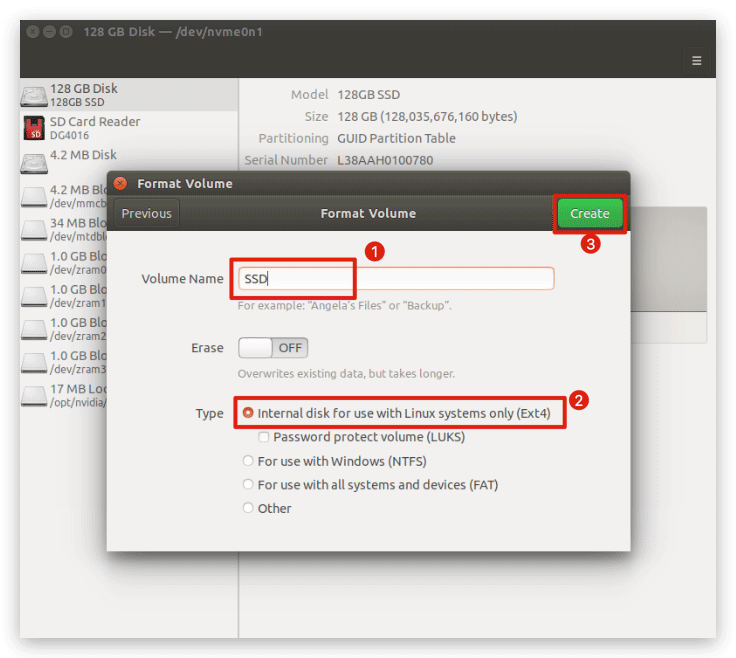
Por favor, dê um nome ao seu SSD e selecione Ext4 no tipo e clique em "Create". Neste ponto, concluímos a preparação do SSD de acordo com os requisitos de expansão.
-
Passo 3. Construir o diretório raiz no SSD
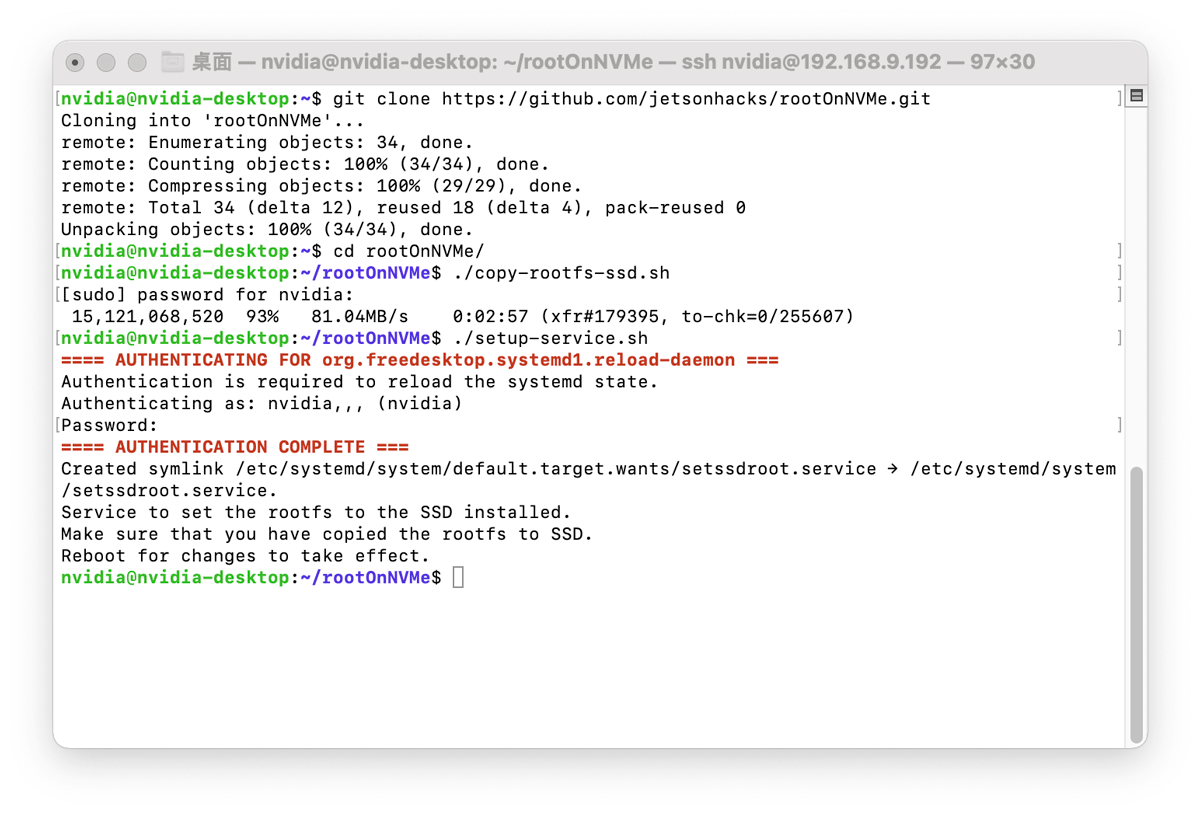
Use o comando git para baixar para o reComputer os arquivos de script que precisamos usar.
git clone https://github.com/limengdu/rootOnNVMe.git
cd rootOnNVMe/
Em seguida, execute o seguinte comando para construir os arquivos do diretório raiz no eMMC para o SSD. O tempo de espera para esta etapa depende do tamanho do diretório raiz que você está usando.
./copy-rootfs-ssd.sh
-
Passo 4. Configure o ambiente e complete a expansão
Execute o seguinte comando para concluir a configuração do rootfs.
./setup-service.sh
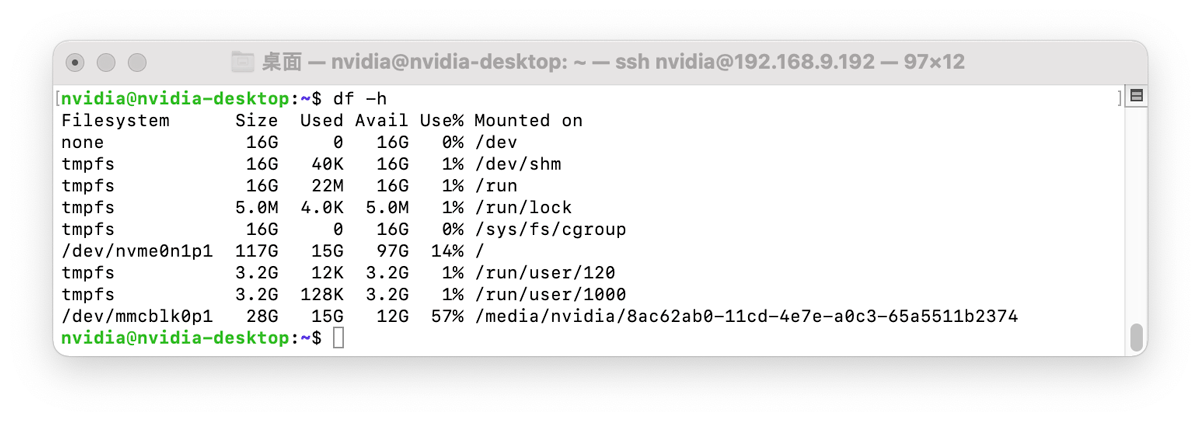
Quando você reiniciar o reComputer, verá que o eMMC se tornou um dispositivo de armazenamento externo na interface principal, e verá que o espaço ocupado pelo sistema foi reduzido, portanto, a expansão foi bem-sucedida.
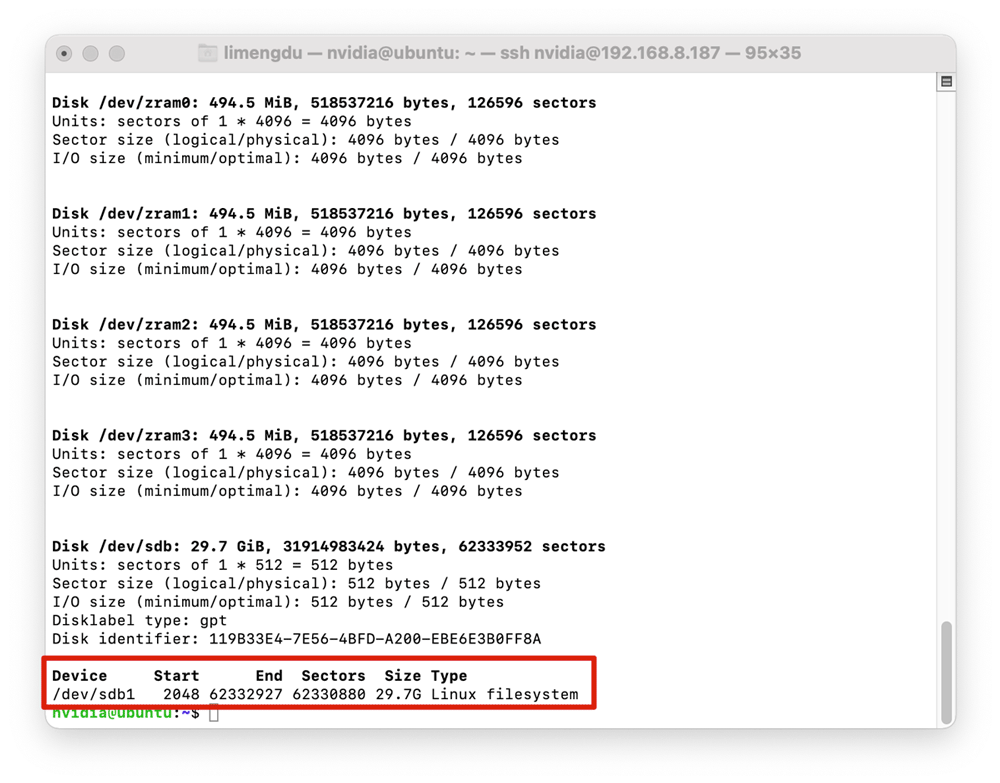
!!!Attention
O caminho padrão do SSD no arquivo de script é /dev/nvme0n1p1, que também é o caminho atribuído por padrão pelo reComputer. Se você perceber que o caminho do seu SSD não corresponde a este com o comando sudo fdisk -l, altere o caminho de todos os /dev/nvme0n1p1 nos arquivos copy-rootfs-ssd.sh, data/setssdroot.service e data/setssdroot.sh em rootOnNVMe para o caminho onde seu SSD está localizado.
A expansão acima não removerá o conteúdo original do diretório raiz do eMMC. Se você não quiser inicializar pelo SSD, pode remover o SSD e o sistema ainda inicializará pelo eMMC.
Recursos
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.