Sensor mmWave de 24GHz - Sensor de Detecção de Queda Humana (MR24FDB1)
Introdução
O módulo de detecção de queda por radar mmWave é um módulo mmWave autônomo, com proteção de privacidade e seguro, operando em 24GHz. Com o radar Doppler Infineon aprimorado e o algoritmo padrão, o módulo é uma solução ideal para aplicações individuais como cuidados de saúde para idosos, casa inteligente e alarme de perigo.
Aplicação
- Detecção de queda
- Casa inteligente
- Cuidados de saúde
Características
- Tecnologia confiável: radar industrial mmWave FMCW da Infineon
- Teoria habilitada: aplica tecnologia de radar Doppler com Sensor de Curta Distância (NDS) operando em 24GHz
- Algoritmo padrão: distingue condições ocupado/desocupado e identifica atividades humanas em um ambiente de auto-adaptação
- Detecção singular de queda: detecta simultaneamente, com proteção de privacidade, sem fio, sem necessidade de uso corporal, quedas suspeitas/queda rápida/permanência anormalmente longa em uma área de até 20 metros quadrados
- Proteção perfeita de privacidade: fornece capacidades de vigilância sem identificação
- Local de instalação flexível: opera adequadamente independentemente de bloqueios de abrigo
- Estado de funcionamento inofensivo: saída de energia inofensiva de 10 dBm
- Alta precisão: reduz a interferência de objetos inanimados e os resultados de saída alcançam mais de 95% de precisão
- Alta robustez: mantém o funcionamento adequado em um ambiente complexo contendo diferentes temperaturas, umidade, ruído, correntes de ar, poeira, luz e assim por diante.
- Antena de alto desempenho: detecta até micromovimentos em um padrão de feixe em leque onde Horizontal 90°/ Vertical 60°
- Distância de medição:
- Distância máxima de percepção de movimento: até 12 metros
- Distância máxima de percepção de micromovimento: até 5 metros
- Distância máxima de percepção do corpo: até 3 metros
- Tempo de detecção:
- Estado desocupado para ocupado: dentro de 0,5 segundos
- Estado ocupado para desocupado: acima de 1 minuto
- Radar personalizável: suporta desenvolvimento secundário incluindo parâmetro de radar, protocolo, antena, função
Visão Geral de Hardware

- Saída S1: nível alto - ocupado, nível baixo - desocupado.
- Saída S2: nível alto - ativo, nível baixo - estacionário
- GP1 a GP4 são controles de seleção de parâmetros, que podem ser redefinidos de acordo com os requisitos do usuário.
- Os sinais de saída desta interface são todos em nível de 3,3V.
O consumo de energia do produto é de 500mW, o que não é adequado para alimentação de longo prazo.
Características Técnicas

Primeiros Passos
Visão Geral da Biblioteca Arduino
Se esta é a sua primeira vez usando Arduino, recomendamos fortemente que você consulte Getting Started with Arduino.
O código da biblioteca usado neste exemplo pode ser baixado clicando no ícone abaixo.
Antes de começarmos a desenvolver um sketch, vamos ver as funções disponíveis da biblioteca.
-
void recvRadarBytes()—— Esta função obtém o comprimento do quadro atual retornado pelo radar. Os quadros são armazenados em um array de acordo com esse comprimento. Parâmetros de entrada: None Valor de retorno: None -
void Bodysign_judgment(byte inf[], float Move_min, float Move_max)—— Os dados retornados pelo radar contêm uma grande quantidade de dados físicos. O usuário tem flexibilidade para ajustar as informações de movimento detectadas com base nos dados de sinal e no algoritmo de decodificação fornecido pela função. O conteúdo do julgamento será enviado pela porta serial. Parâmetros de entrada:-
byte inf[]—— Quadros de dados enviados pelo radar. -
float Move_min—— Define o valor de limite para o usuário estar em um estado estacionário ou desocupado. -
float Move_max—— Define o valor de limite para o usuário estar em um estado estacionário ou em um estado em que alguém está em movimento.Valor de retorno: None Sobre a descrição dos parâmetros de sinal: teoricamente, os valores calculados dos parâmetros de sinal variam de 0 a 100. Quando o valor calculado é 0, significa que ninguém é detectado no ambiente ao redor. Quando o valor calculado é 1, significa que o ambiente é detectado como ocupado e em um estado estacionário. Um valor calculado de 2 a 100 indica que o ambiente ao redor é detectado como ocupado e ativo.
-
-
void Situation_judgment(byte inf[])—— Esta função detecta se o corpo humano está se aproximando ou se afastando do local onde o radar está localizado e determina o movimento do corpo humano, de acordo com o algoritmo dentro do radar. Essas informações serão enviadas pela porta serial. Parâmetros de entrada:-
byte inf[]—— Quadros de dados enviados pelo radar.Valor de retorno: None
-
-
void Fall_inf(byte inf[])—— Esta função conclui a decodificação das informações de detecção de queda retornadas pelo radar e imprime os resultados da detecção do radar pela porta serial. Parâmetros de entrada:-
byte inf[]—— Quadros de dados enviados pelo radar.Valor de retorno: None
-
-
unsigned short int us_CalculateCrc16(unsigned char *lpuc_Frame, unsigned short int lus_Len)—— Esta função é usada para gerar o checksum CRC16. Parâmetros de entrada:-
unsigned char *lpuc_Frame—— O quadro de dados que você deseja enviar ao radar (não incluindo o quadro de checksum final de 2 Bytes). -
unsigned short int lus_Len—— O comprimento do quadro de dados que você deseja enviar ao radar.Valor de retorno: dígito de verificação do tipo inteiro de 2 Bytes.
Valor de retorno: None
-
-
void SerialInit()—— Define a taxa de baud da porta serial do radar para 9600. Se for uma placa Seeeduino, define a porta serial por software para RX: 2, TX: 3. Parâmetros de entrada: None Valor de retorno: None
Instalação
Passo 1. Você precisa instalar o software Arduino.

Passo 2. Inicie o aplicativo Arduino.
Passo 3. Selecione o modelo da sua placa de desenvolvimento e adicione-o à IDE Arduino.
-
Se você quiser usar Seeeduino V4.2 para as rotinas posteriores, consulte este tutorial para concluir a adição.
-
Se você quiser usar Seeeduino XIAO para as rotinas posteriores, consulte este tutorial para concluir a adição.
-
Se você quiser usar XIAO RP2040 para as rotinas posteriores, consulte este tutorial para concluir a adição.
-
Se você quiser usar XIAO BLE para as rotinas posteriores, consulte este tutorial para concluir a adição.
Passo 4. Instale a biblioteca de código Arduino.
Comece obtendo a base de código no GitHub e baixando-a para o seu computador local.
Como você baixou a biblioteca em formato zip, abra sua IDE Arduino, clique em Sketch > Include Library > Add .ZIP Library. Escolha o arquivo zip que você acabou de baixar, e se a biblioteca for instalada corretamente, você verá Library added to your libraries na janela de aviso. O que significa que a biblioteca foi instalada com sucesso.

Materiais Necessários
Antes de concluir os exemplos a seguir, você precisará preparar os seguintes materiais.
|  |  |
| 24GHz mmWave Radar Sensor | Seeed XIAO BLE nRF52840 Sense | Cabo Flat de Passo 2mm para 2,54mm |
Passo 1. Conecte o dispositivo ao computador através da placa principal. O diagrama de fiação é mostrado na tabela abaixo.
 | |||
| Radar Sensor | Placa Principal | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | D6 | |
| TX | --> | D7 | |
Etapa 2. Na barra de menu no canto superior esquerdo da Arduino IDE, selecione tool, escolha o tipo de placa de desenvolvimento que você está usando e selecione a porta serial correspondente.
Se você estiver usando MacOS, o nome da porta serial do dispositivo geralmente começará com /dev/cu.usbmodem xxx, terminando com o nome do dispositivo. Se você estiver usando Windows, o nome da porta serial do dispositivo geralmente começará com COM, também terminando com o nome do dispositivo.

Neste exemplo, demonstraremos como o radar funciona com o nosso produto popular XIAO BLE.
Demo1 Decodificar dados do algoritmo de radar integrado que fornecem o status do ambiente
O radar possui um conjunto completo de algoritmos integrados que podem gerar diretamente as condições ambientais obtidas pelo julgamento do radar. Esta rotina descreverá como imprimir as condições ambientais detectadas pelo radar diretamente pela porta serial via código.
O código deste exemplo é o seguinte.
#include <falldetectionradar.h>
FallDetectionRadar radar;
void setup()
{
radar.SerialInit();
Serial.begin(9600);
delay(1500);
Serial.println("Readly");
}
void loop()
{
radar.recvRadarBytes(); //Receive radar data and start processing
if (radar.newData == true) { //The data is received and transferred to the new list dataMsg[]
byte dataMsg[radar.dataLen+1] = {0x00};
dataMsg[0] = 0x55; //Add the header frame as the first element of the array
for (byte n = 0; n < radar.dataLen; n++)dataMsg[n+1] = radar.Msg[n]; //Frame-by-frame transfer
radar.newData = false; //A complete set of data frames is saved
//radar.ShowData(dataMsg); //Serial port prints a set of received data frames
radar.Fall_inf(dataMsg); //Sleep information output
}
}
No código setup(), ligamos a porta Serial e a porta Serial1 no XIAO BLE. Serial é usada para impressão de dados e Serial1 é usada para comunicação entre o XIAO BLE e o radar. De acordo com a taxa de transmissão do radar, definimos a taxa de transmissão de ambas as portas seriais para 9600. Quando estiver pronto, o monitor serial imprimirá Ready.
radar.Situation_judgment(dataMsg);
Quando a lista dataMsg for completamente obtida, ela será usada como o parâmetro da função Situation_judgment() para concluir a saída dos dados de monitoramento ambiental, e o resultado da saída será impresso diretamente no monitor serial.
Envie o programa. Ao abrir o monitor serial com uma taxa de transmissão de 9600, o resultado deverá ser exibido. A saída deverá ser semelhante à imagem abaixo.
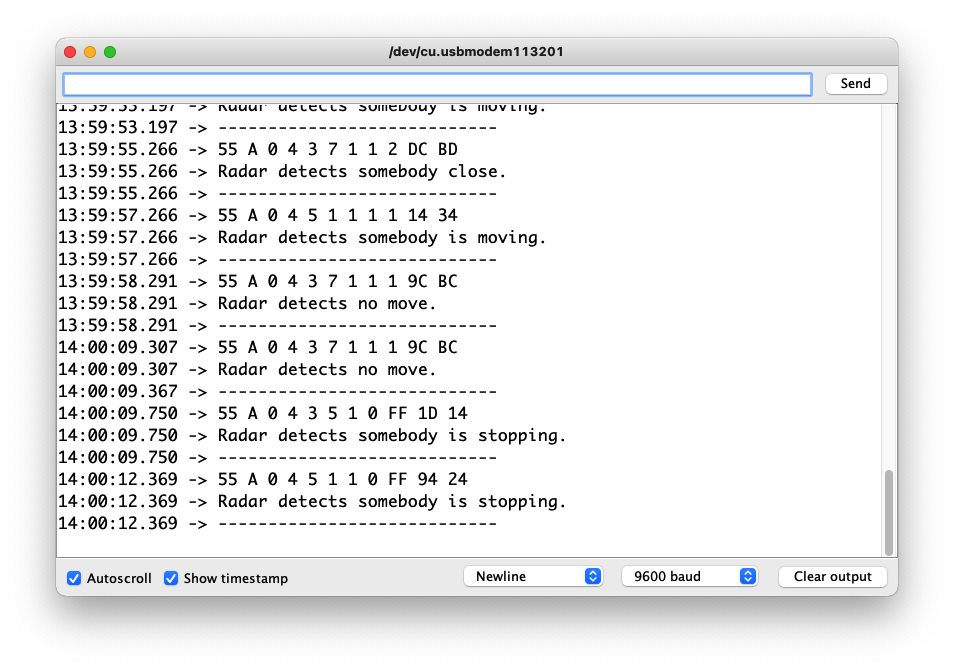
Se você não vir dados após abrir o monitor serial, isso pode ser normal. A aquisição desta parte dos dados do radar depende das mudanças no movimento humano dentro do alcance de monitoramento do radar. Somente quando o movimento da pessoa dentro do alcance muda, o radar enviará dados e, então, os dados serão impressos.
Se você quiser ver quais dados são retornados pelo radar, pode remover o comentário de radar.ShowData(dataMsg);, que irá gerar o conjunto completo de quadros de dados recebidos pelo monitor serial.
Demo2 Obtenção de movimento humano usando análise de parâmetros de características
Entre a grande quantidade de dados retornados pelo radar, as informações sobre dados físicos constituem a maior parte das informações. Às vezes, confiar demais nos próprios algoritmos do radar pode produzir resultados pouco satisfatórios em alguns cenários. Então, podemos optar por usar as informações retornadas pelo radar para fazer ajustes adequados de acordo com os cenários de aplicação reais.
O código deste exemplo é o seguinte.

//Physical_Parameters_Example.ino
#include <sleepbreathingradar.h>
SleepBreathingRadar radar;
void setup()
{
radar.SerialInit();
Serial.begin(9600);
delay(1500);
Serial.println("Readly");
}
void loop()
{
radar.recvRadarBytes(); //Receive radar data and start processing
if (radar.newData == true) { //The data is received and transferred to the new list dataMsg[]
byte dataMsg[radar.dataLen+1] = {0x00};
dataMsg[0] = 0x55; //Add the header frame as the first element of the array
for (byte n = 0; n < radar.dataLen; n++)dataMsg[n+1] = radar.Msg[n]; //Frame-by-frame transfer
radar.newData = false; //A complete set of data frames is saved
//radar.ShowData(dataMsg); //Serial port prints a set of received data frames
radar.Bodysign_judgment(dataMsg, 1, 15); //Output of human movement using sign parameters
}
}
radar.Bodysign_judgment(dataMsg, 1, 15);
Depois que o array dataMsg for obtido, podemos passar os dados desse array como o primeiro argumento para a função Bodysign_judgment(), que analisa os parâmetros do sinal corporal.
O segundo e o terceiro parâmetros da função Bodysign_judgment() são, respectivamente, os valores críticos para julgar ausência de ocupação e corpo humano em repouso, e os valores críticos para corpo humano em repouso e em movimento.
(1, 15) significa que, quando o valor calculado do sinal corporal é menor que 1, a saída é que não há ninguém no ambiente. Quando o valor somático é maior ou igual a 1 e menor que 15, a saída é que o ambiente atual está ocupado por alguém em estado estacionário. Quando o valor do sinal corporal é maior ou igual a 35, a saída é que há alguém se movendo no ambiente.
Envie o programa. Ao abrir o monitor serial com uma taxa de transmissão de 9600, o resultado deverá ser exibido. A saída deverá ser semelhante à imagem abaixo.
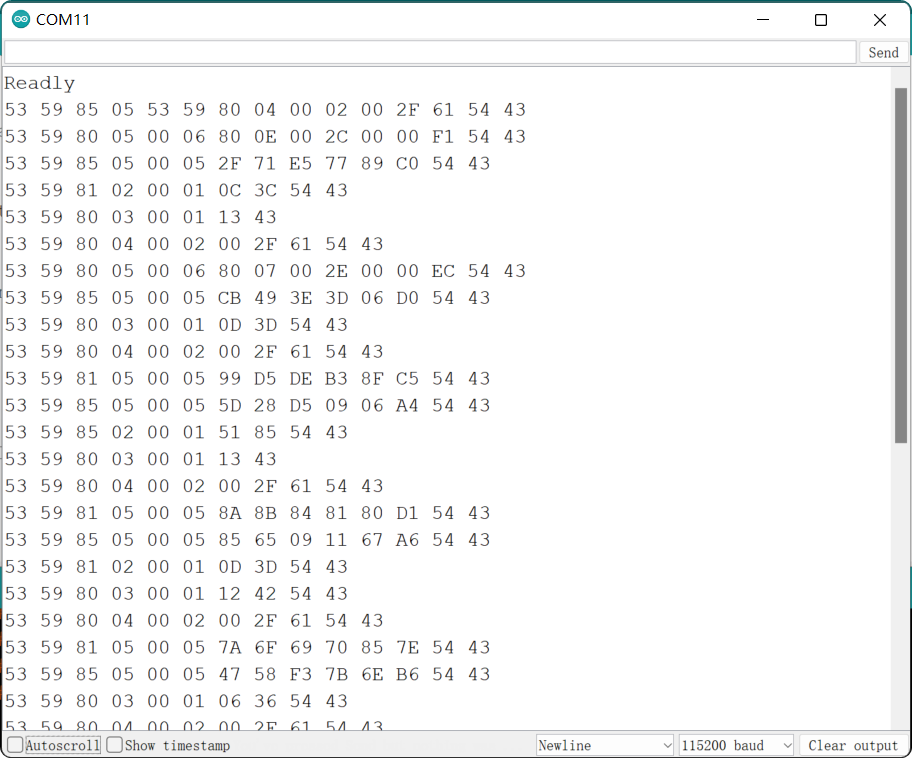
Os valores que seguem o quadro de dados de saída representam os valores de sinal calculados.
Demo 3 Enviando dados para o radar
O radar abre um número muito grande de interfaces para que possamos obter informações e definir a sensibilidade ou o cenário do radar. Esta rotina irá instruir o usuário sobre como usar o manual do usuário para enviar mensagens de dados ao radar para ajustar os parâmetros do radar ou obter as informações de dados desejadas.
Etapa 1. Obtenha quadros de dados com base na consulta desejada.
Baixe o user manual na área Resource e, no Capítulo 8.2, encontre o conteúdo dos quadros que você precisa consultar ou configurar e organize-os.
Neste exemplo, supondo que você queira consultar o ID do dispositivo de radar, você deverá conseguir obter o código de função desejado, o código de endereço 1 e o código de endereço 2.

Etapa 2. Abra o código de exemplo na Arduino IDE.

O código deste exemplo é o seguinte.
//CRC_Checksum_Generation.ino
#include <sleepbreathingradar.h>
SleepBreathingRadar radar;
char buff[30];
void setup()
{
radar.SerialInit();
Serial.begin(9600);
delay(1500);
Serial.println("Readly");
}
void loop()
{
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x08, 0x00, 0x05, 0x01, 0x04, 0x03};
unsigned int length = sizeof(data)/sizeof(unsigned char);
unsigned char datas[length + 2];
for (int n = 0; n < length; n++)datas[n] = data[n];
unsigned short int crc_data = radar.us_CalculateCrc16(data, length);
sprintf(buff, "The CRC16 values is: %04x", crc_data);
Serial.println(buff);
datas[length] = (crc_data & 0xff00) >> 8;
datas[length+1] = crc_data & 0xff;
Serial.print("The datas send to the radar: ");
for (int n = 0; n < length + 2; n++){
char buffsend[1];
sprintf(buffsend, "0x%02x ", datas[n]);
Serial.print(buffsend);
}
Serial.println();
delay(6000);
}
Etapa 3. Modifique o conteúdo do quadro de dados para gerar o quadro de dados completo enviado ao radar.
O que precisamos modificar é o array data[] no loop.
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x08, 0x00, 0x05, 0x01, 0x04, 0x03};
Os lugares que precisamos modificar são o segundo elemento e do quarto até o último elemento. O quadro de cabeçalho 0x55 é fixo e não precisa ser modificado. O segundo quadro é o quadro de comprimento, por favor, modifique-o de acordo com o comprimento dos dados que você envia. O terceiro quadro é fixo em 0x00. O quarto quadro é o código de função, o quinto quadro é o código de endereço 1 e assim por diante.
Sobre o método de cálculo do quadro de comprimento: Comprimento = Comprimento dos Dados + Código de Função + Código de Endereço 1 + Código de Endereço 2 + Dados + Checksum. (Quadros de cabeçalho não são contados)
Consulte o Capítulo 8 do user manual para obter mais informações sobre formatos e regras de quadros.
Envie o programa. Ao abrir o monitor serial com uma taxa de transmissão de 9600, o resultado deverá ser exibido. A saída deverá ser semelhante à imagem abaixo.

Os dados completos que precisam ser enviados ao radar serão exibidos no monitor serial.
Outras formas
Se você não quiser usar nenhum master para gerar quadros de dados completos, você também pode colar o código abaixo em um editor que possa executar programas em C. Siga o procedimento acima e preencha os dados do array com o conteúdo de seus quadros.
#include <stdio.h>
const unsigned char cuc_CRCHi[256]= {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40
};
const unsigned char cuc_CRCLo[256]= {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7,
0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E,
0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9,
0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC,
0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32,
0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D,
0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38,
0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF,
0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1,
0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4,
0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB,
0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA,
0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0,
0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97,
0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E,
0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89,
0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83,
0x41, 0x81, 0x80, 0x40
};
static unsigned short int us_CalculateCrc16(unsigned char *lpuc_Frame, unsigned short int lus_Len){
unsigned char luc_CRCHi = 0xFF;
unsigned char luc_CRCLo = 0xFF;
int li_Index=0;
while(lus_Len--){
li_Index = luc_CRCLo ^ *( lpuc_Frame++);
luc_CRCLo = (unsigned char)( luc_CRCHi ^ cuc_CRCHi[li_Index]);
luc_CRCHi = cuc_CRCLo[li_Index];
}
return (unsigned short int )(luc_CRCLo << 8 | luc_CRCHi);
}
int main() {
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x07, 0x00, 0x01, 0x01, 0x01};
unsigned short int crc_data = 0x0000;
unsigned int length = sizeof(data)/sizeof(unsigned char);
unsigned char datas[length + 2];
for (int n = 0; n < length; n++)datas[n] = data[n];
printf("The data frame length is: %d\n", length);
crc_data = us_CalculateCrc16(data, length);
datas[length] = (crc_data & 0xff00) >> 8;
datas[length+1] = crc_data & 0xff;
printf("The last two CRC check digits are: %04x\n", crc_data);
printf("The datas send to the radar: ");
for (int n = 0; n < length + 2; n++){
printf("0x%02x ", datas[n]);
}
printf("\n");
return 0;
}
Após a execução do editor, também é possível gerar os quadros de dados completos que precisam ser enviados ao radar.

Passo 4. Envie quadros de dados para o radar.
Conecte o radar diretamente à porta USB do computador por meio de um dispositivo UART para USB. A fiação é mostrada na tabela abaixo.
 | |||
| Sensor de Radar | Placa Principal | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | TX | |
| TX | --> | RX | |
Use um software como um assistente de depuração serial para selecionar a porta serial onde o radar está localizado.
O radar de 24GHz precisa de alimentação de 5V, caso contrário o radar pode não funcionar corretamente.
Após uma conexão bem-sucedida, você verá o radar enviando um fluxo constante de mensagens.

Cole o quadro de dados completo que obtivemos no passo3 na área de envio do software. Em seguida, clique em Send.
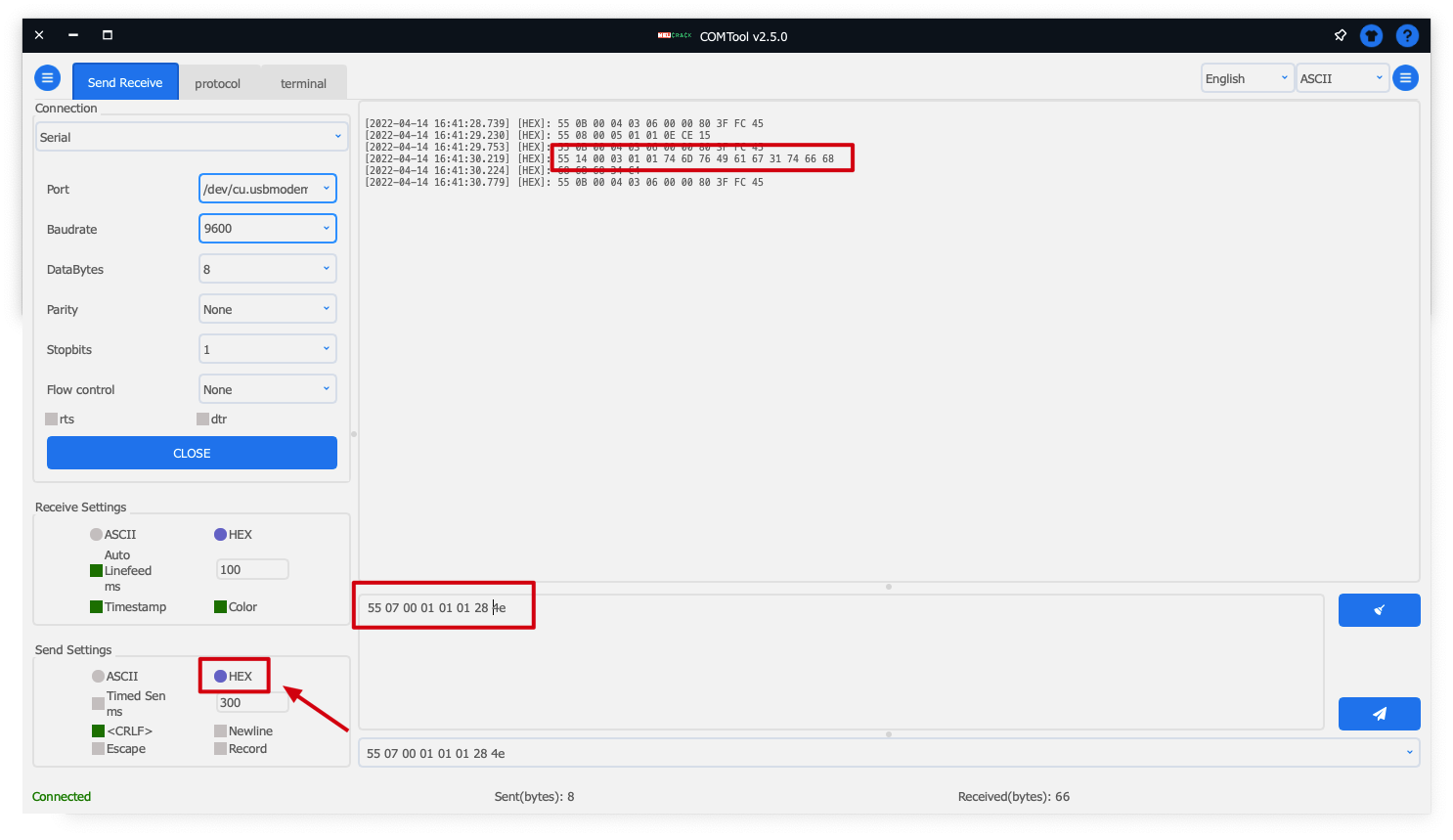
Você pode ficar atento a um conjunto de dados retornado em que o terceiro elemento seja 0x03. Este conjunto de dados é a informação obtida após a consulta. Se você enviar dados que ajustam os parâmetros do radar, ele também retornará essas informações.
Se você escolher ASCII como formato para envio de dados, cada conjunto de dados precisa ser prefixado com 0x. Se você escolher HEX, então cada conjunto de dados não precisa ser prefixado com 0x.
Solução de Problemas
FAQ1: Como aplicar o código ao Seeeduino (ou Arduino)?
Devido ao diferente design de hardware, a porta serial da série XIAO ou do Wio Terminal é chamada de Serial1, enquanto o Seeeduino ou Arduino precisa usar uma porta serial por software. Se você quiser usar o radar com Seeeduino, pode alterar a porta serial por software ou usar os pinos 2 (RX) e 3 (TX).

FAQ2: O que devo fazer se o XIAO BLE e o Radar coletarem dados por muito tempo e não for possível enviar o código?
Nesse momento, você pode usar o dedo para pressionar levemente o botão de reset na parte superior do XIAO BLE para reenviar o programa para execução.
Recursos
- [PDF] Sleep Breathing Radar Sensor Datasheet
- [ZIP] Esquemático de Respiração 24GHz
- [PDF] Manual do usuário
- [PPTX] Seeed série de sensores mmWave V2.0
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.