Sensor mmWave 24GHz - Módulo Lite de Presença Humana Estática (MR24HPC1)
Introdução
O Sensor mmWave 24GHz - Módulo Lite de Presença Humana Estática é um sensor de radar mmWave com antena integrada, amigável à saúde, que aplica tecnologia de medição FMCW, operando em 24GHz, para implementação de presença humana estática, independentemente das influências ambientais. Este também é um radar personalizado no qual os usuários podem configurar parâmetros subjacentes para determinar as funções detectadas.
Aplicações
- Iluminação externa automática
- Abertura automática de portas
- Monitoramento de toda a casa
- Eletrodomésticos inteligentes (TV, aquecedor de banheiro, segurança, etc.)
- Eficiência energética em escritórios (ar-condicionado, iluminação)
- Curva de monitoramento do sono
- Segurança doméstica
- Disparo de IPC
Características
- Radar mmWave de presença humana: Aplica tecnologia de medição FMCW, operando em 24GHz e com alcance de detecção de 5 metros, para detectar o comportamento humano na área de sensoriamento
- Detecção de radar personalizada: Fornece alcance de detecção configurável, gatilho de movimento, tempo de mudança de estado, bem como software de depuração visual para atender aos requisitos de vários cenários
- Estado de funcionamento amigável à saúde: Potência de saída tão baixa que é inofensiva ao corpo humano
- Alta imunidade a interferências: Emite dados independentemente de influências ambientais como temperatura, umidade, ruído, fluxo de ar, poeira, luz
- Suporte a Arduino
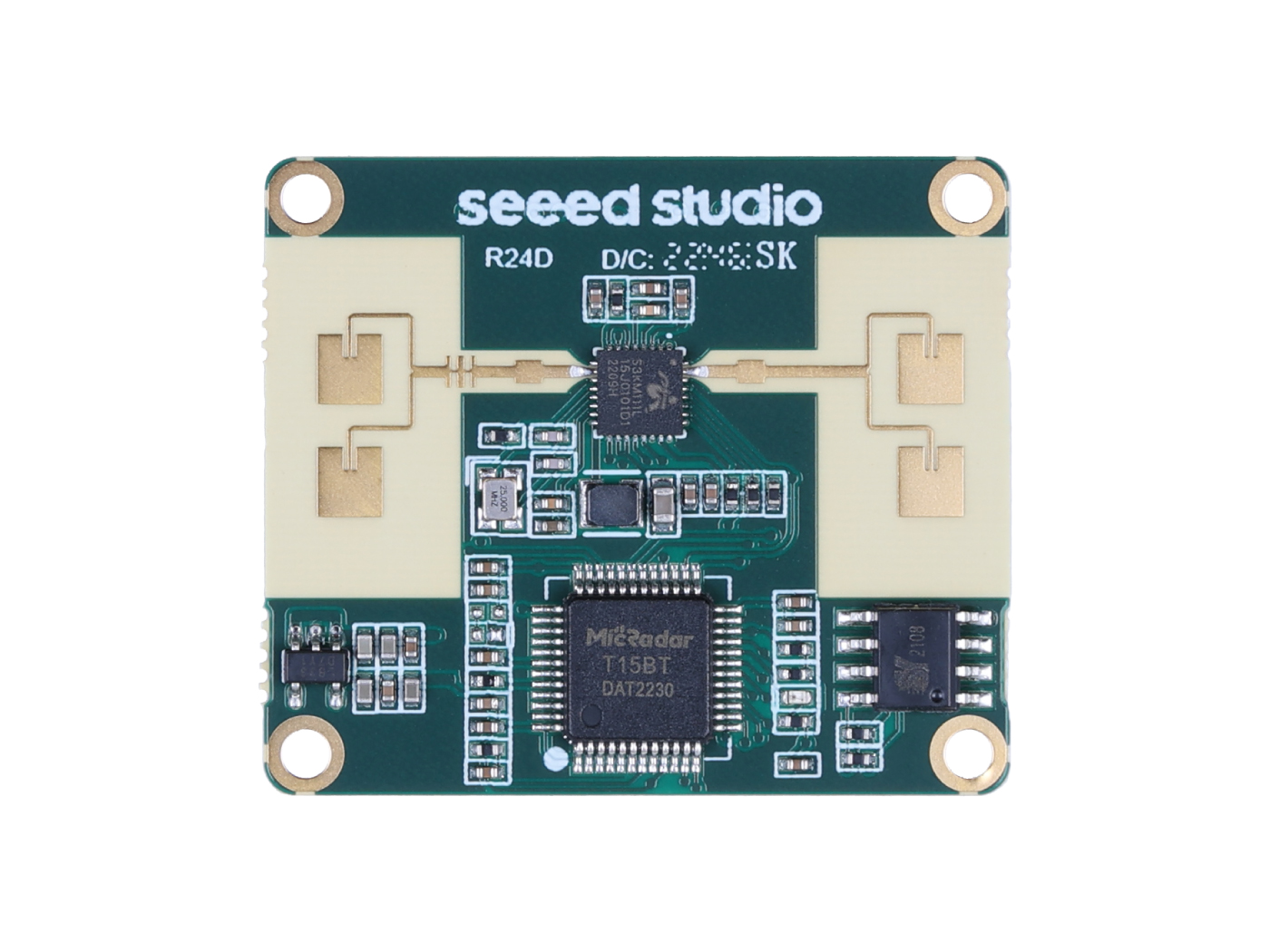
Visão Geral do Hardware
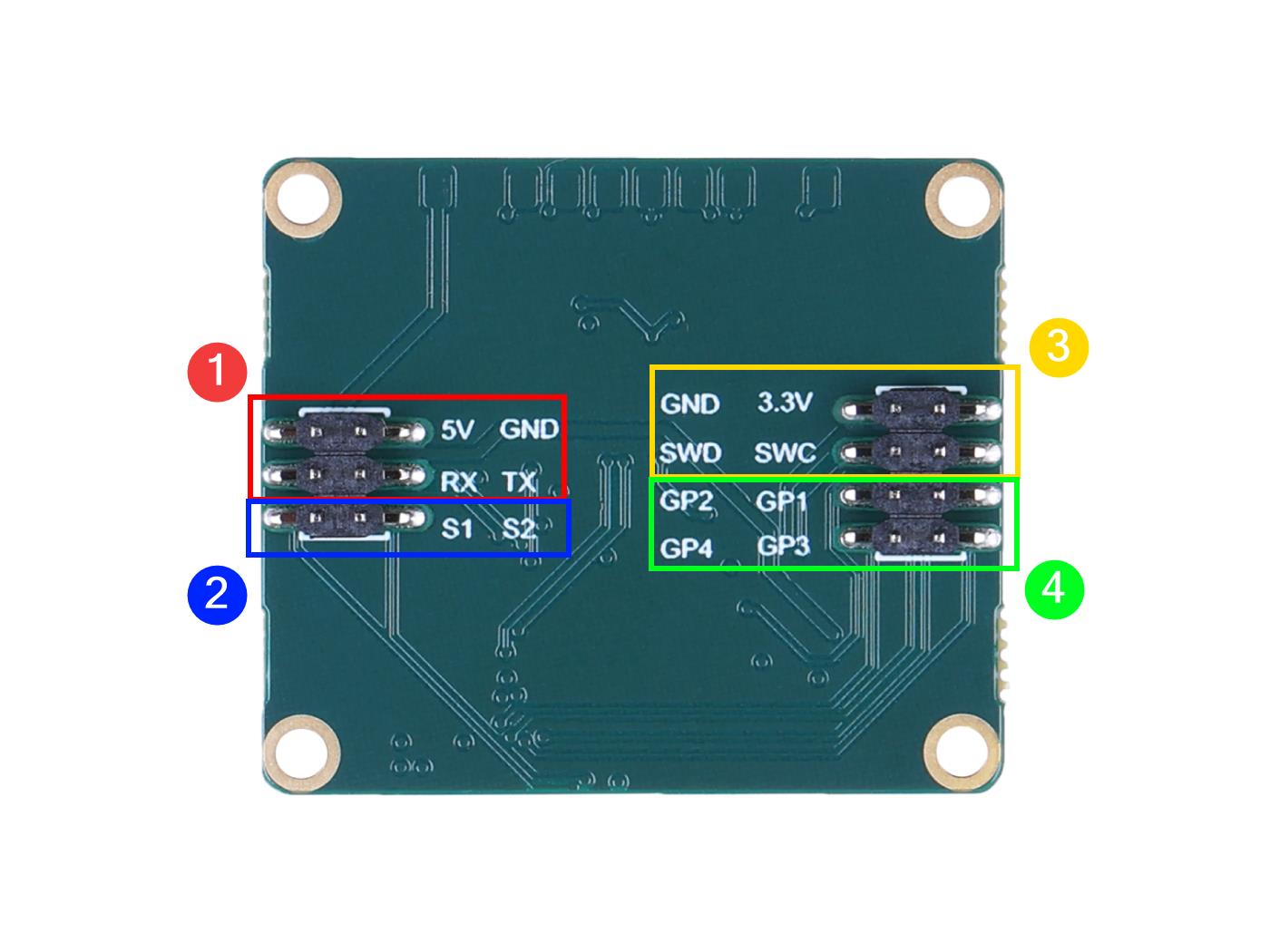
- O pino 5V é a interface de alimentação para o radar e RX e TX são as interfaces de transmissão de dados para o radar. RX significa recepção serial e TX significa transmissão serial.
- A interface de saída de status de presença humana. Você pode usar o nível desses dois pinos para determinar o movimento humano atual no ambiente. Saída S1: nível alto - ocupado, nível baixo - desocupado. Saída S2: nível alto - ativo, nível baixo - estático.
- Pinos para gravação de firmware.
- Pinos de entrada/saída suspensos.
Primeiros Passos
Atualizações de Versão de Firmware
O sensor mmWave passou por um longo período de precipitação técnica e por valiosas sugestões fornecidas pelos usuários, e temos iterado sobre o produto original para fornecer resultados de monitoramento mais precisos e confiáveis e uma melhor experiência para nossos usuários.
Os sensores recém-enviados vêm com o firmware mais recente por padrão para garantir a experiência de produto mais atual. No entanto, para o bem da experiência dos antigos usuários, fornecemos aqui o firmware mais recente e o método de atualização para garantir que você possa usar nossa tecnologia mais recente.
Método universal - usar J-link para gravar o firmware
Se você encontrar firmware incorreto ou anomalia no radar, mau funcionamento do firmware, etc., usar este método para regravar o firmware é a maneira mais eficaz.
Download do firmware mais recente
| Versão do Firmware | Endereço de Download |
|---|---|
| Jlink_MR24HPC1-20230302.bin | Download |
-
Verifique cuidadosamente a função do seu produto, não misture com outros sensores mmWave para gravar este firmware, caso contrário isso pode causar funcionamento anormal do produto, e as consequências serão de sua própria responsabilidade!
-
Observe também que diferentes maneiras de atualizar o firmware usam conteúdos de firmware diferentes; o que você está baixando é o firmware gravado via J-link.
Para atualizar seu radar para a versão mais recente
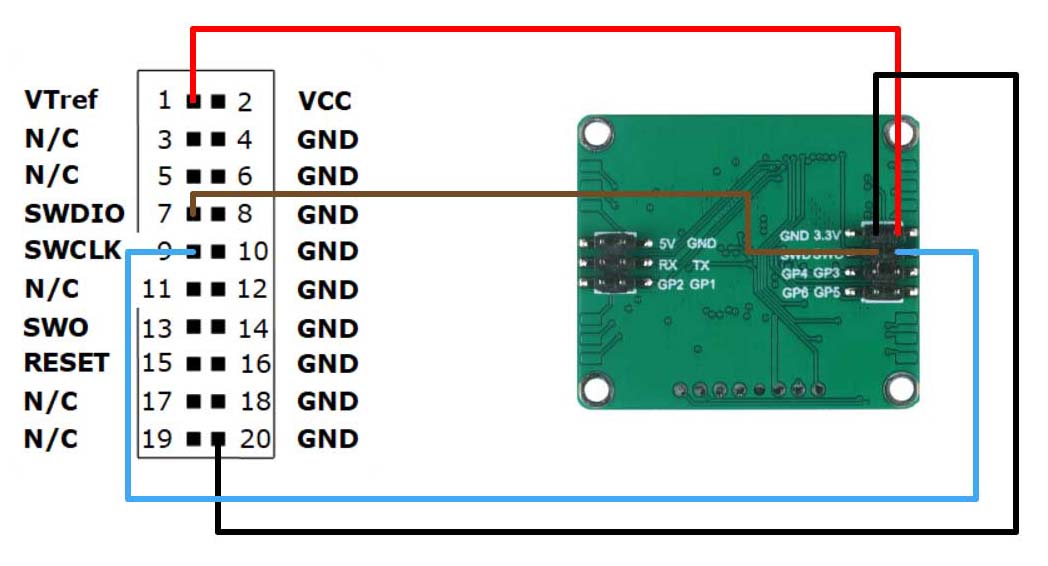
Passo 1. Você precisará ter um Jlink e um MR24HPC1 Sensor mmWave 24GHz.
Conecte o radar e o Jlink juntos por meio de fio Dupont, como mostrado no diagrama abaixo.
Passo 2. Baixe o software e o firmware necessários.
| Arquivo | Endereço de Download |
|---|---|
| JlinkV644e.rar | Download |
| Pack_Segger_AT32F4xx_v1.3.3.zip | Download |
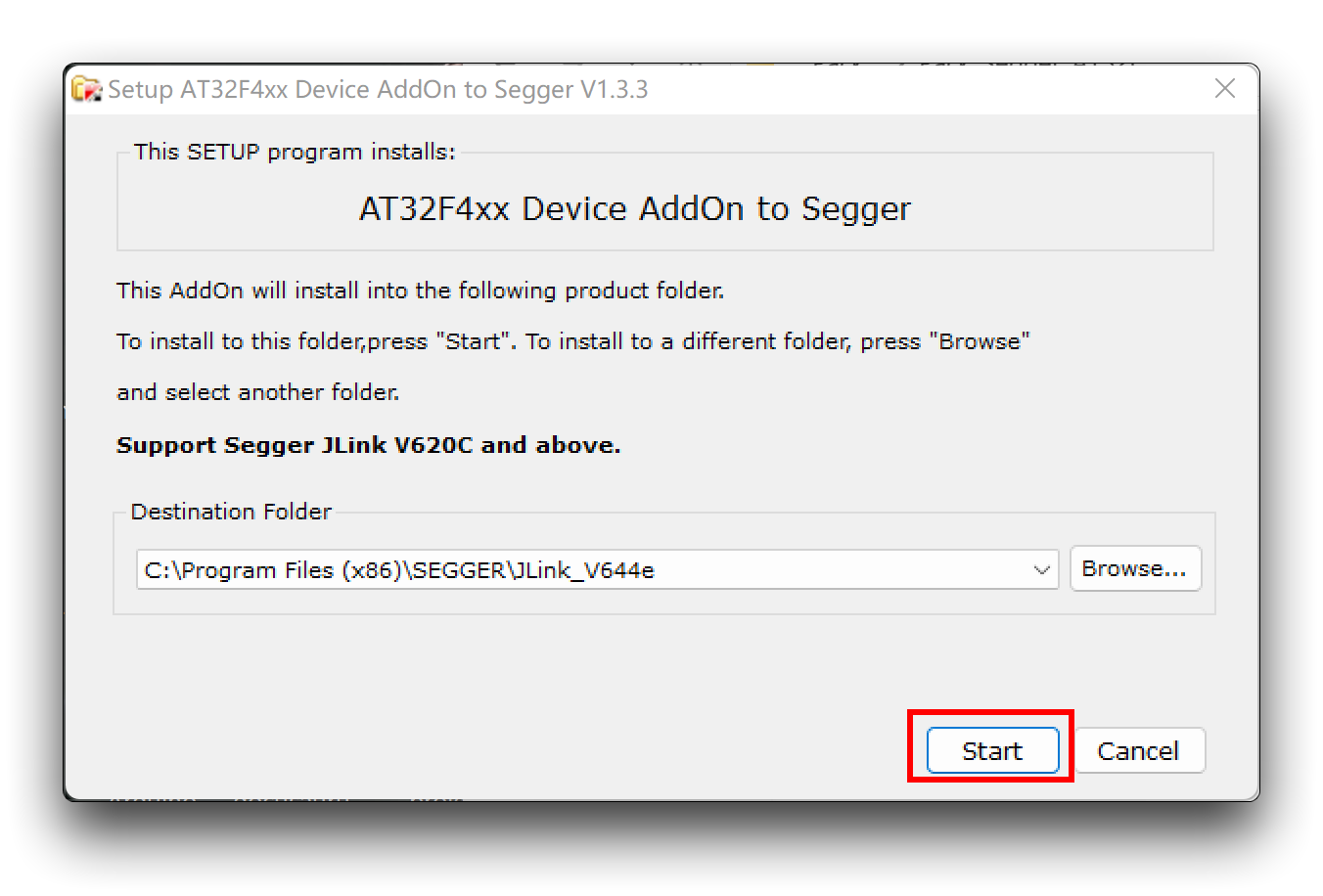
Passo 3. Descompacte JlinkV644e.rar e abra o arquivo JLink_Windows_V644e.exe dentro.
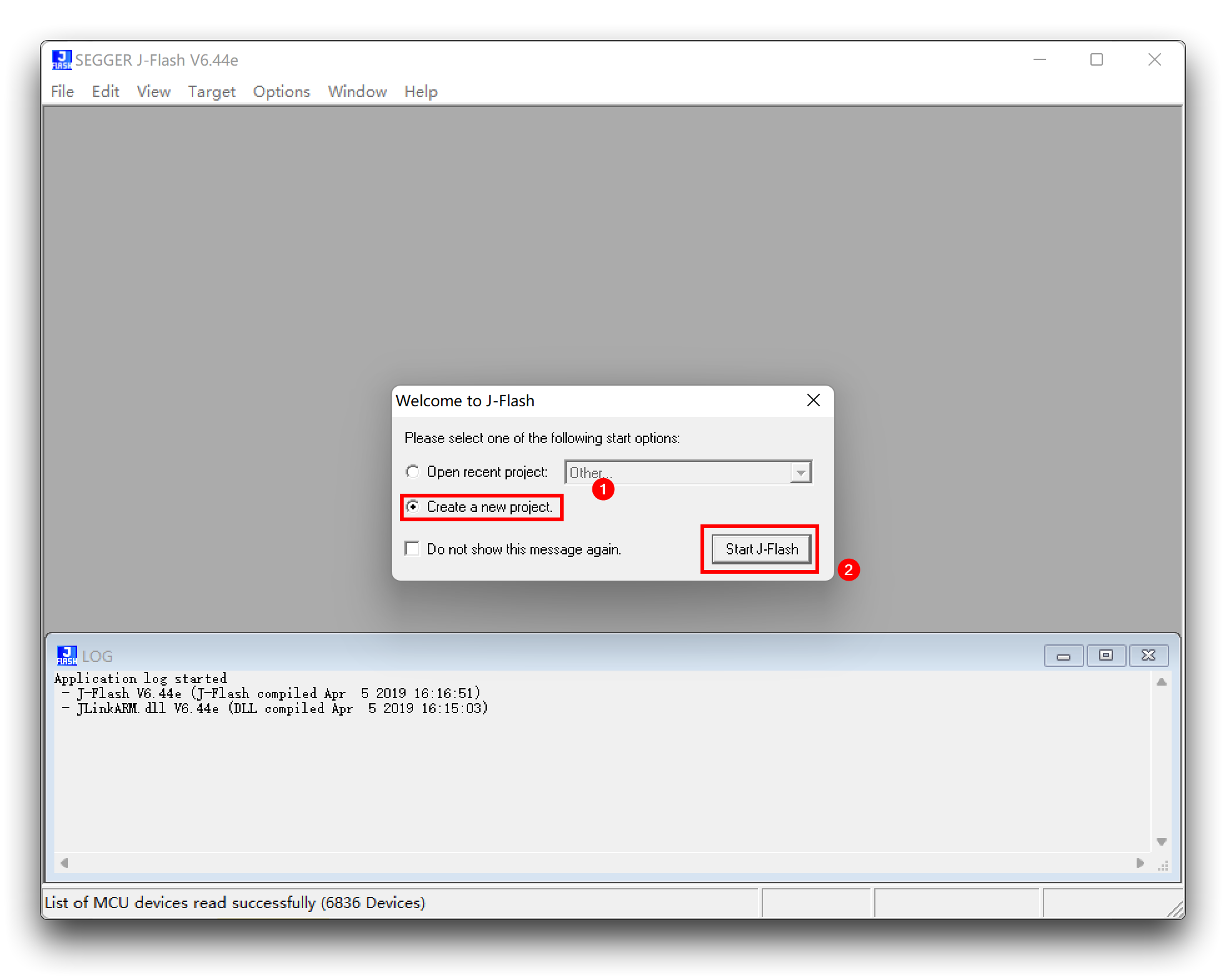
Basta seguir as opções padrão para instalar. Quando a instalação estiver concluída, inicie o software J-Flash V6.44e.
Passo 4. Instale o pacote do chip.
Descompacte Pack_Segger_AT32F4xx_v1.3.3.zip e abra Segger_AT32F4xx_AddOn.exe dentro.
Se você encontrar um erro como o da imagem abaixo ao adicionar algo ao JFlash, pode seguir as instruções abaixo para resolver o problema.
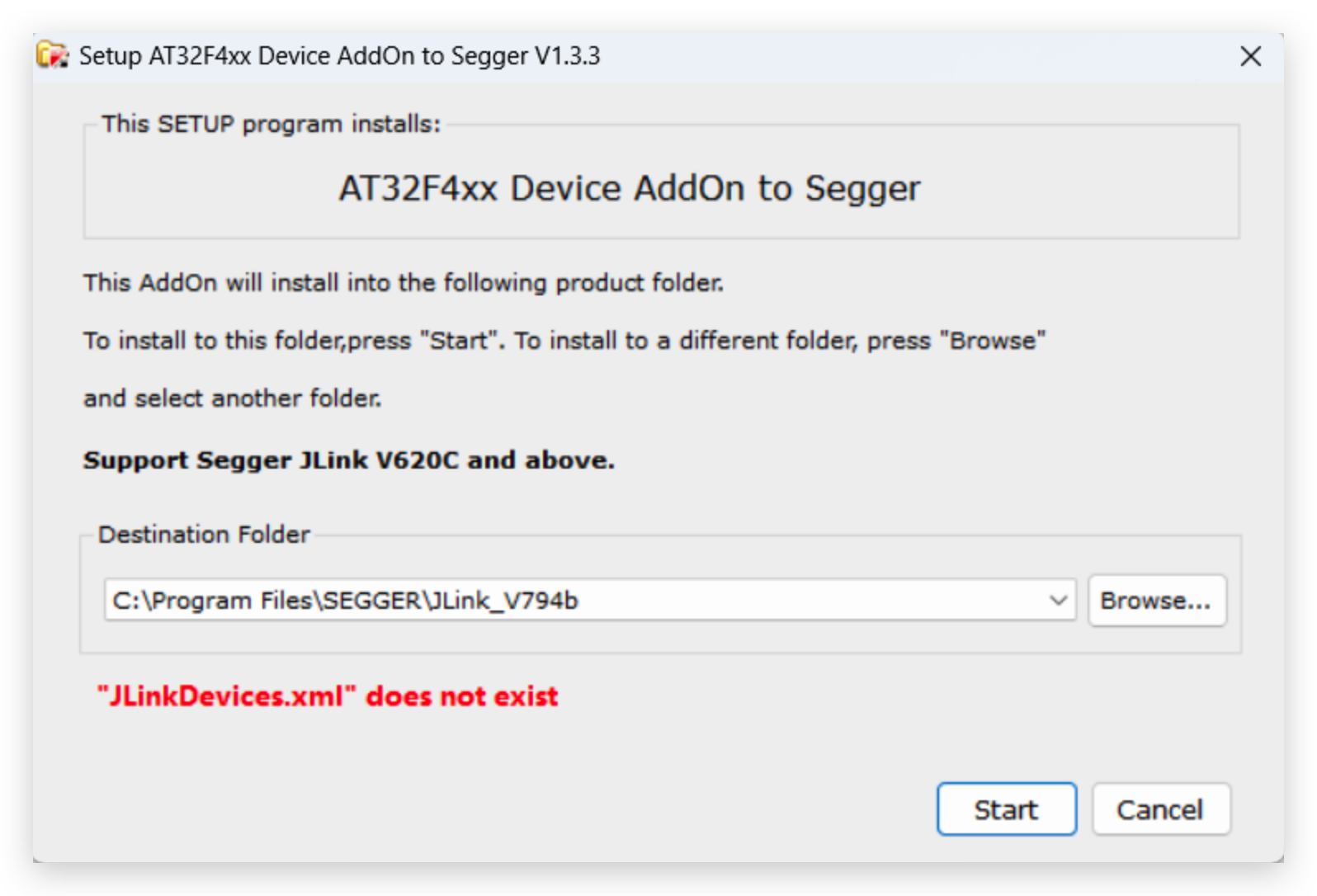
Solução:
-
Baixe este arquivo em https://www.arterychip.com/en/product/AT32F403A.jsp
-
Descompacte o arquivo e abra
-
Copie JLinkDevices.xml de C:\Program Files\SEGGER\JLink_V794 para C:\Users[User]\AppData\Roaming\SEGGER
Isso corrige o problema e podemos gravar com o software JFlash ou JFlash Lite.
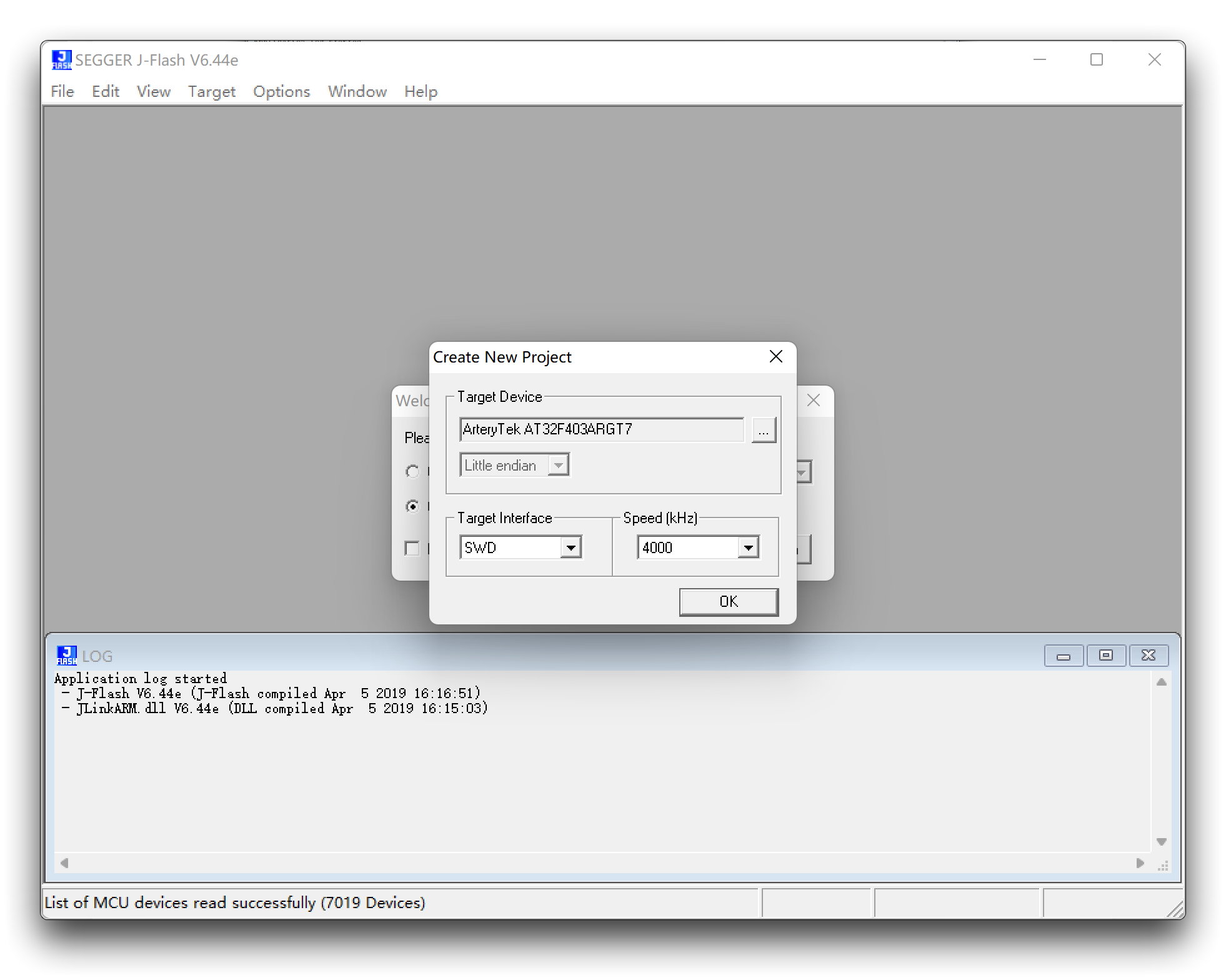
Passo 5. Crie um novo projeto.
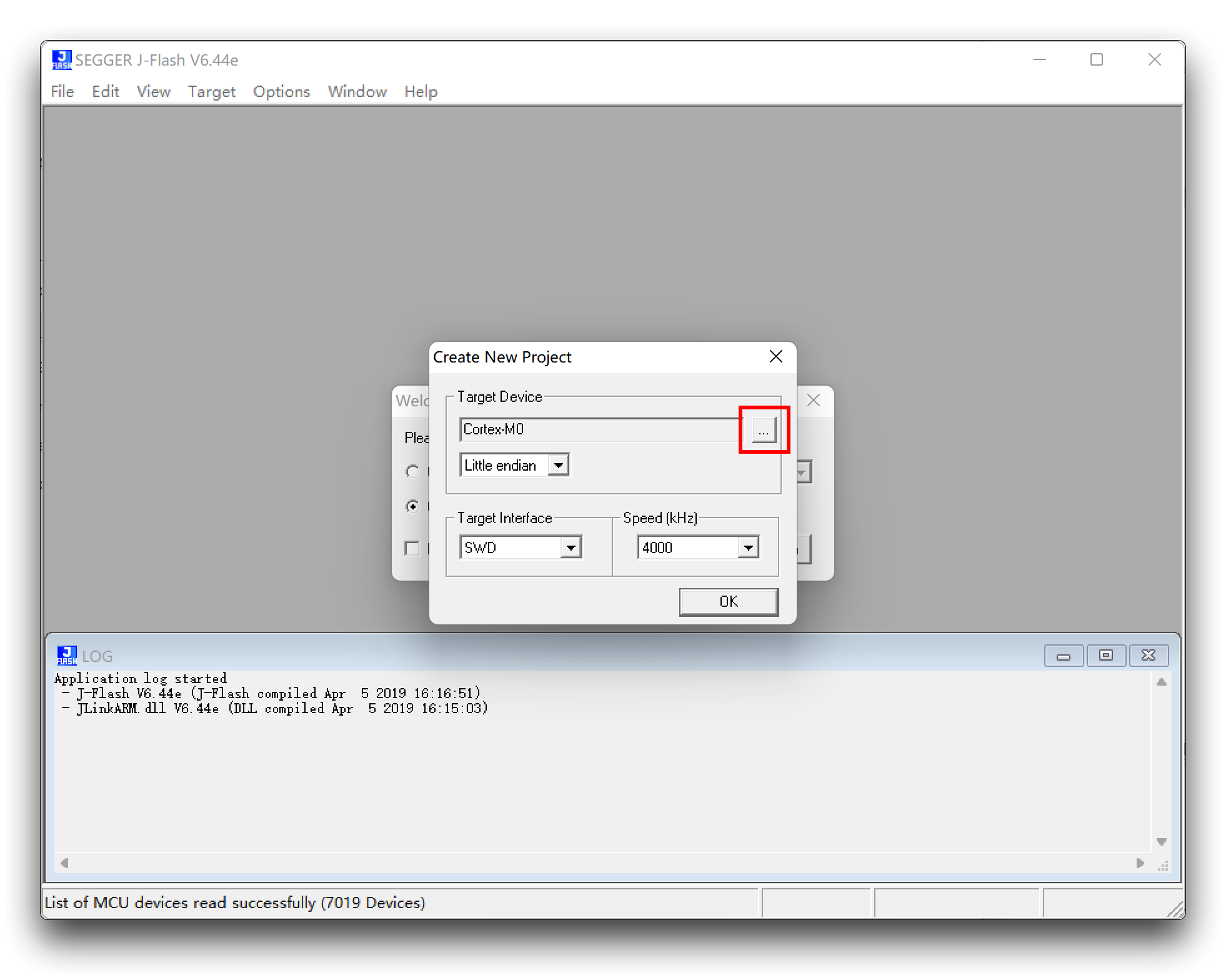
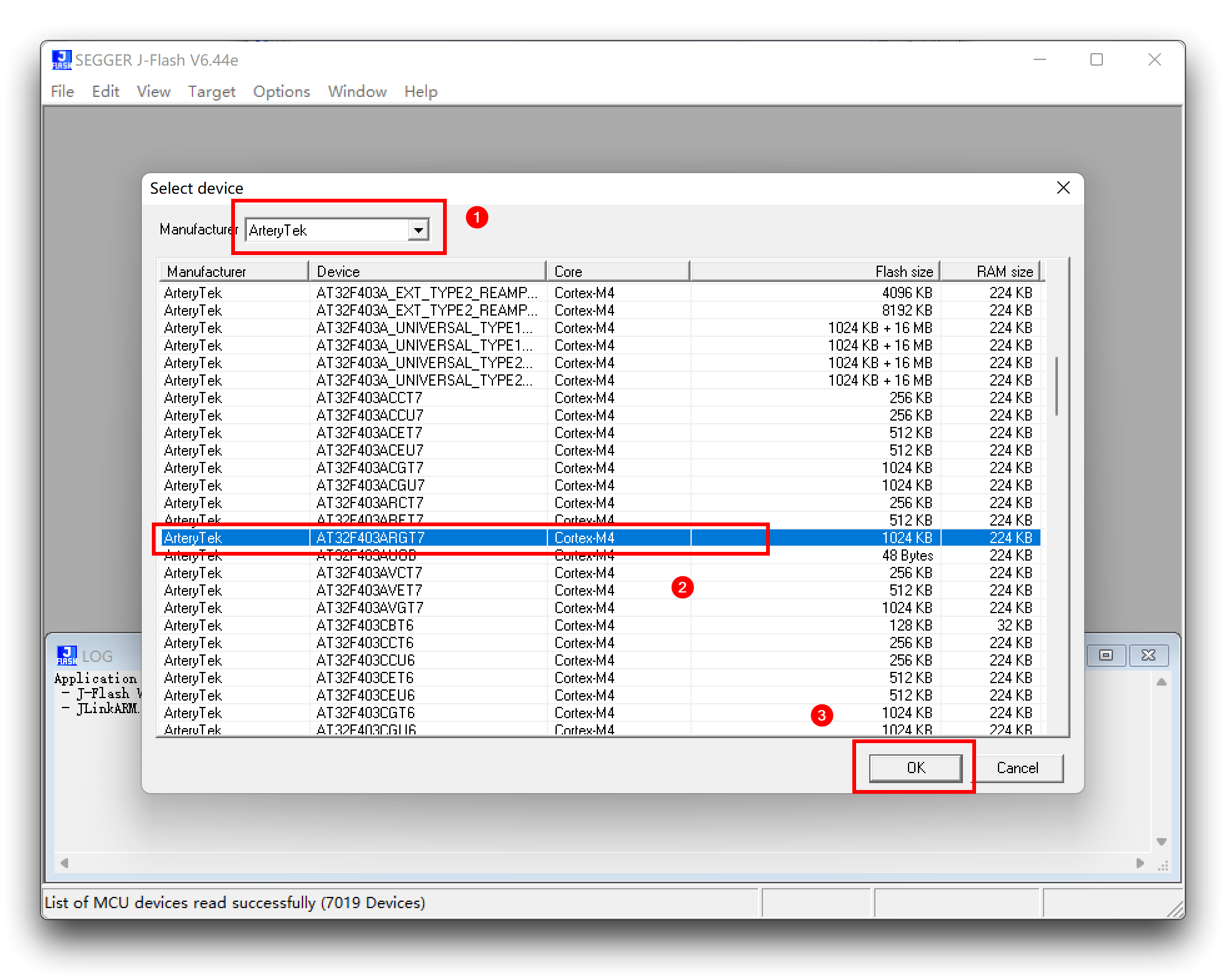
Encontre e escolha AT32F403ARGT7.
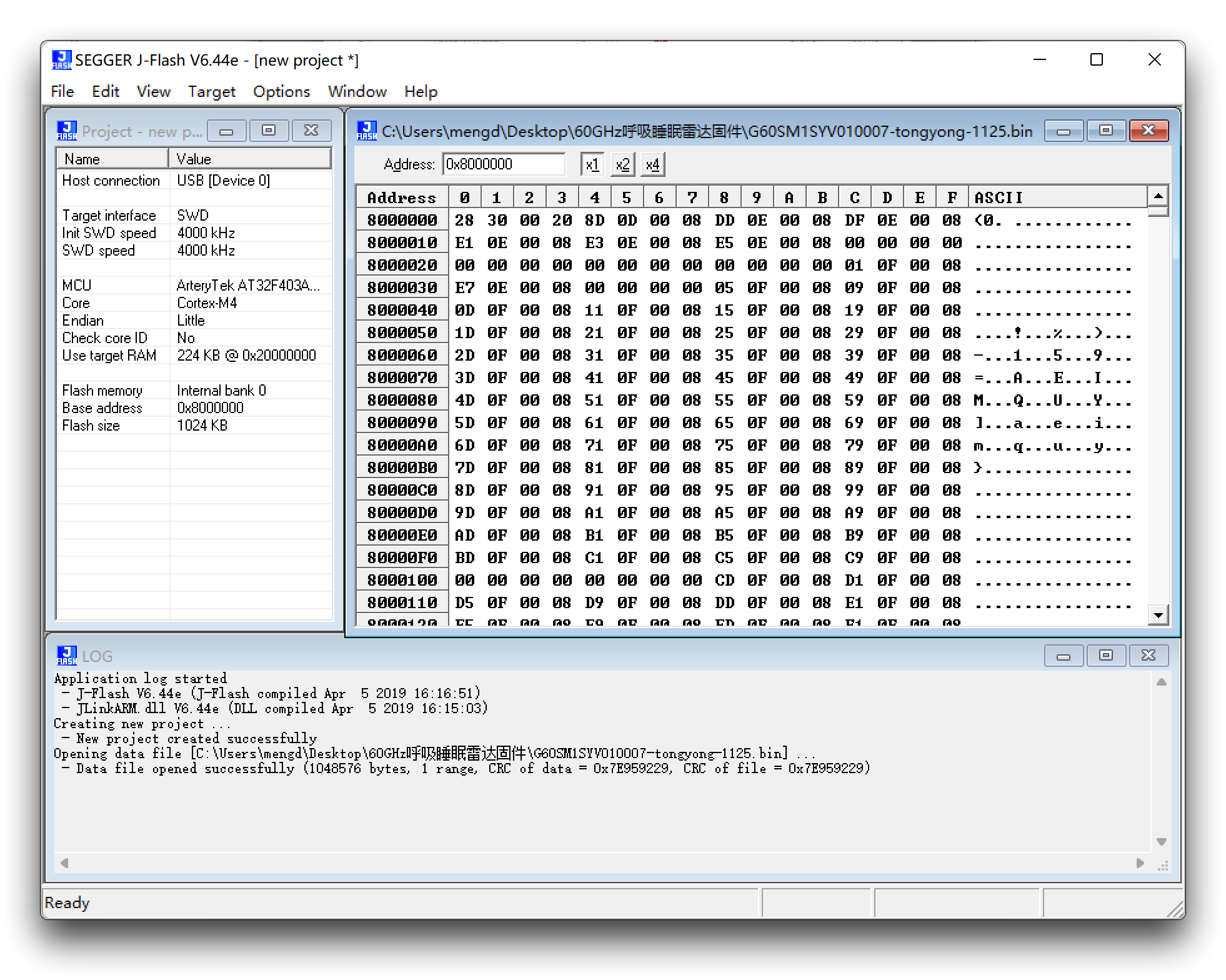
Passo 6. Arraste e solte o firmware do radar (arquivo .bin) neste software e uma janela aparecerá; vamos apenas usar seu endereço inicial padrão de 0x8000000.
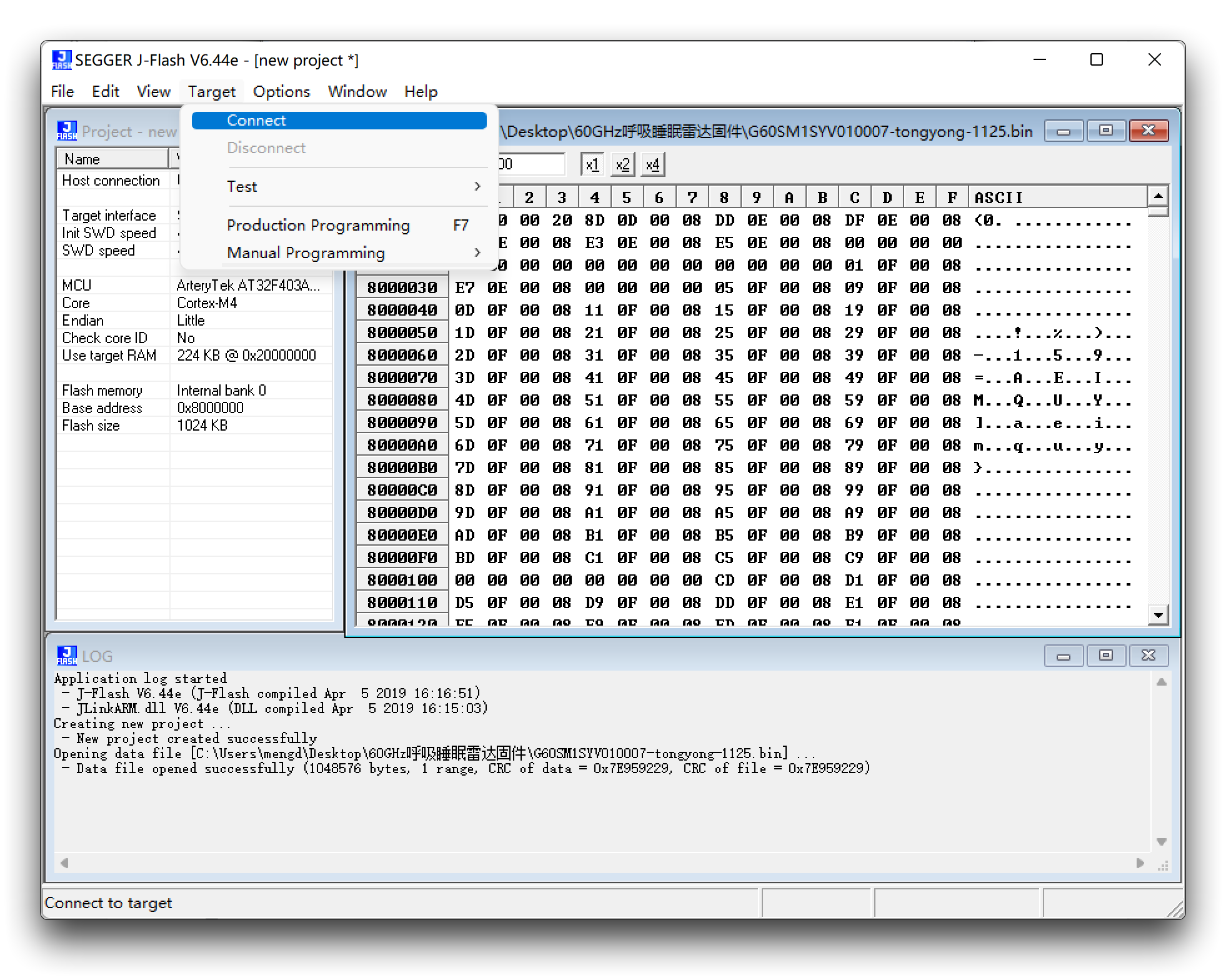
Passo 7. Clique em Target -> Connect
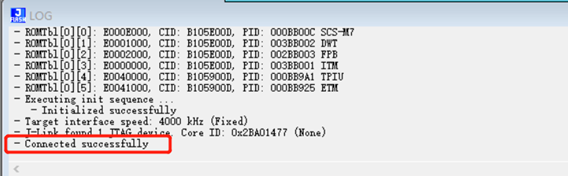
Quando a conexão for bem-sucedida, será exibido Connected successfully.
Apagar firmware: Target -> manual Programming -> Erase Chip
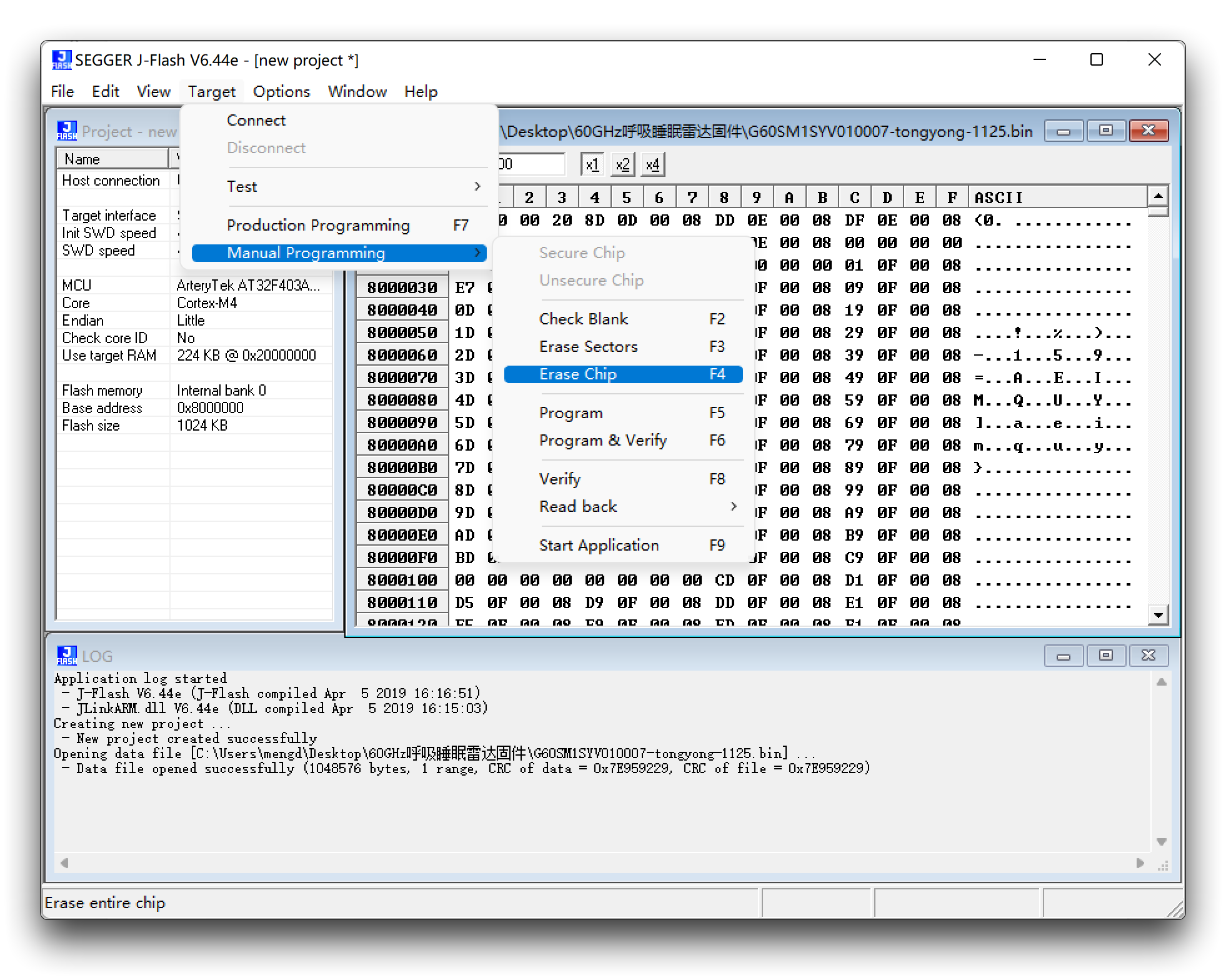
Atualizar firmware: Target -> manual Programming -> Program & Verify
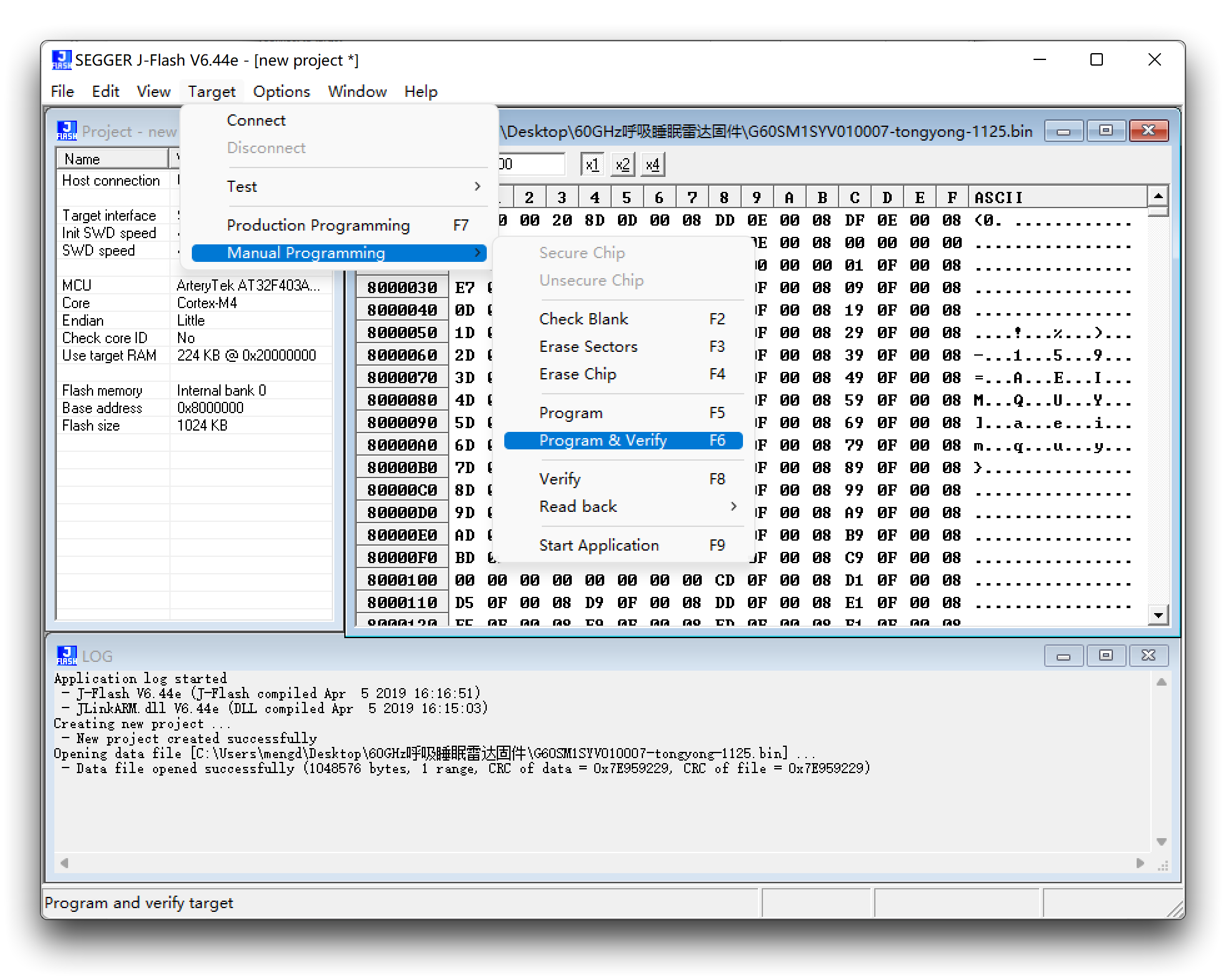
Neste ponto, a atualização do firmware está completa.
Atualizar firmware via UART
Considerando que o J-link é caro, é muito extravagante comprar um J-link para a grande maioria dos usuários que só precisam atualizar o firmware do radar, portanto oferecemos um método de atualização via UART.
Download do firmware mais recente
| Versão do Firmware | Endereço de Download |
|---|---|
| UART_MR24HPC1-20230302.bin | Download |
-
Verifique cuidadosamente a função do seu produto, não misture com outros sensores mmWave para gravar este firmware, caso contrário isso pode causar funcionamento anormal do produto, e as consequências serão de sua própria responsabilidade!
-
Observe também que diferentes maneiras de atualizar o firmware usam conteúdos de firmware diferentes; o que você está baixando é o firmware gravado via UART.
-
Certifique-se de que a versão do firmware do seu radar seja pelo menos a versão G24VD1SYV001006 antes de usar o UART para atualizar o firmware, caso contrário isso pode desabilitar o radar; nesse ponto você terá que usar J-link para gravar o firmware para poder usá-lo!
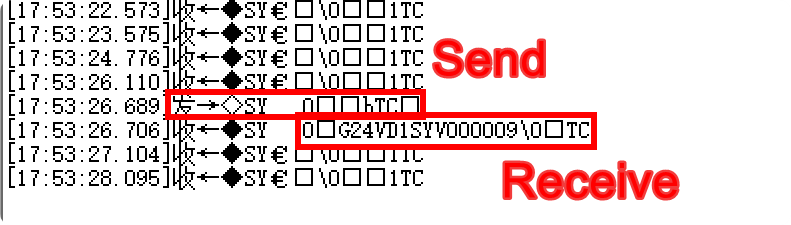
Você pode consultar as informações do número da versão do firmware enviando o comando 0x53 0x59 0x02 0xA4 0x00 0x01 0x0F 0x62 0x54 0x43 para o radar. Os dados relatados pelo radar são então exibidos como uma string, e você verá um efeito semelhante ao mostrado abaixo.
G24VD1SYV000009 é o número de modelo relatado no radar, onde 000009 é o número da versão. Isso significa que este sensor não suporta atualização via UART.
Para atualizar seu radar para a versão mais recente
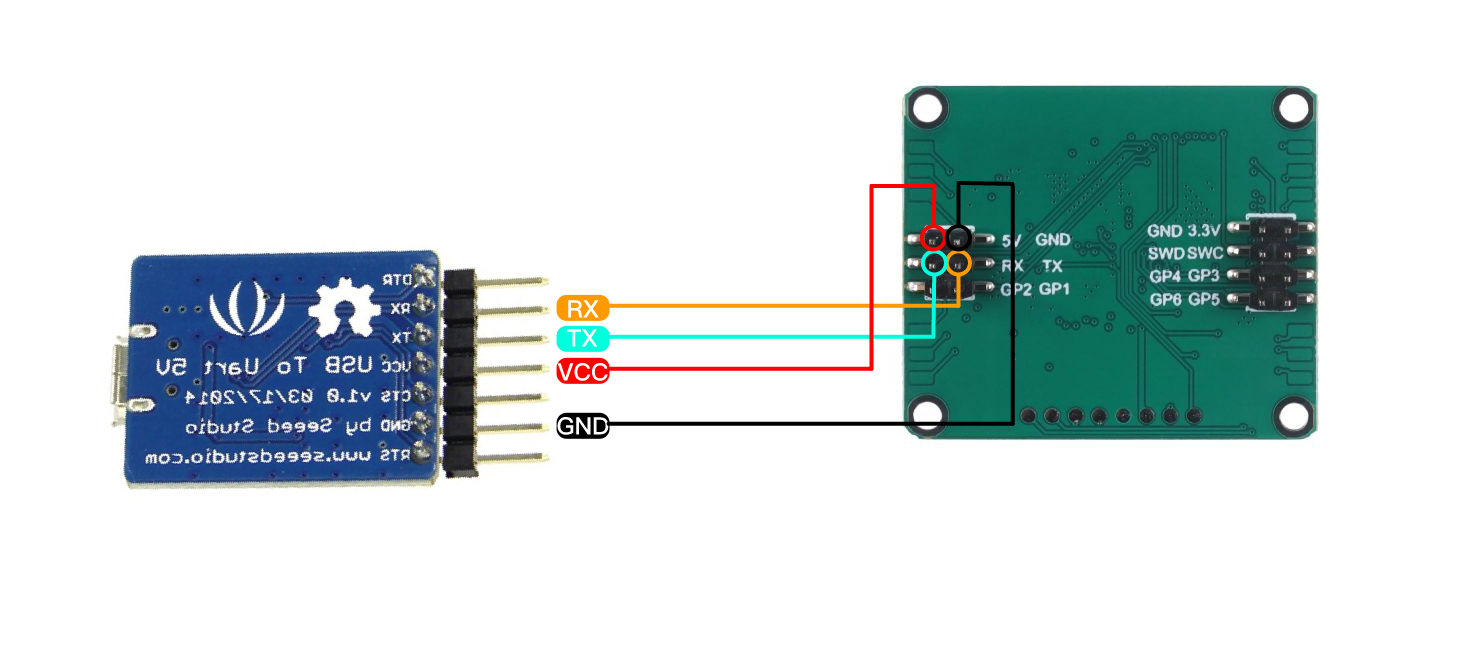
Passo 1. Você precisará ter um UART para USB e um MR24HPC1 Sensor mmWave 24GHz.
Conecte o radar e o UART para USB juntos por meio de fio Dupont, como mostrado no diagrama abaixo.
Passo 2. Baixe o software e o firmware necessários.
| Arquivo | Endereço de Download |
|---|---|
| PackageMake-v1.1.1.zip | Download |
Passo 3. Descompacte o pacote PackageMake-v1.1.1.zip e abra o arquivo PackageMake-v1.1.1.exe dentro.
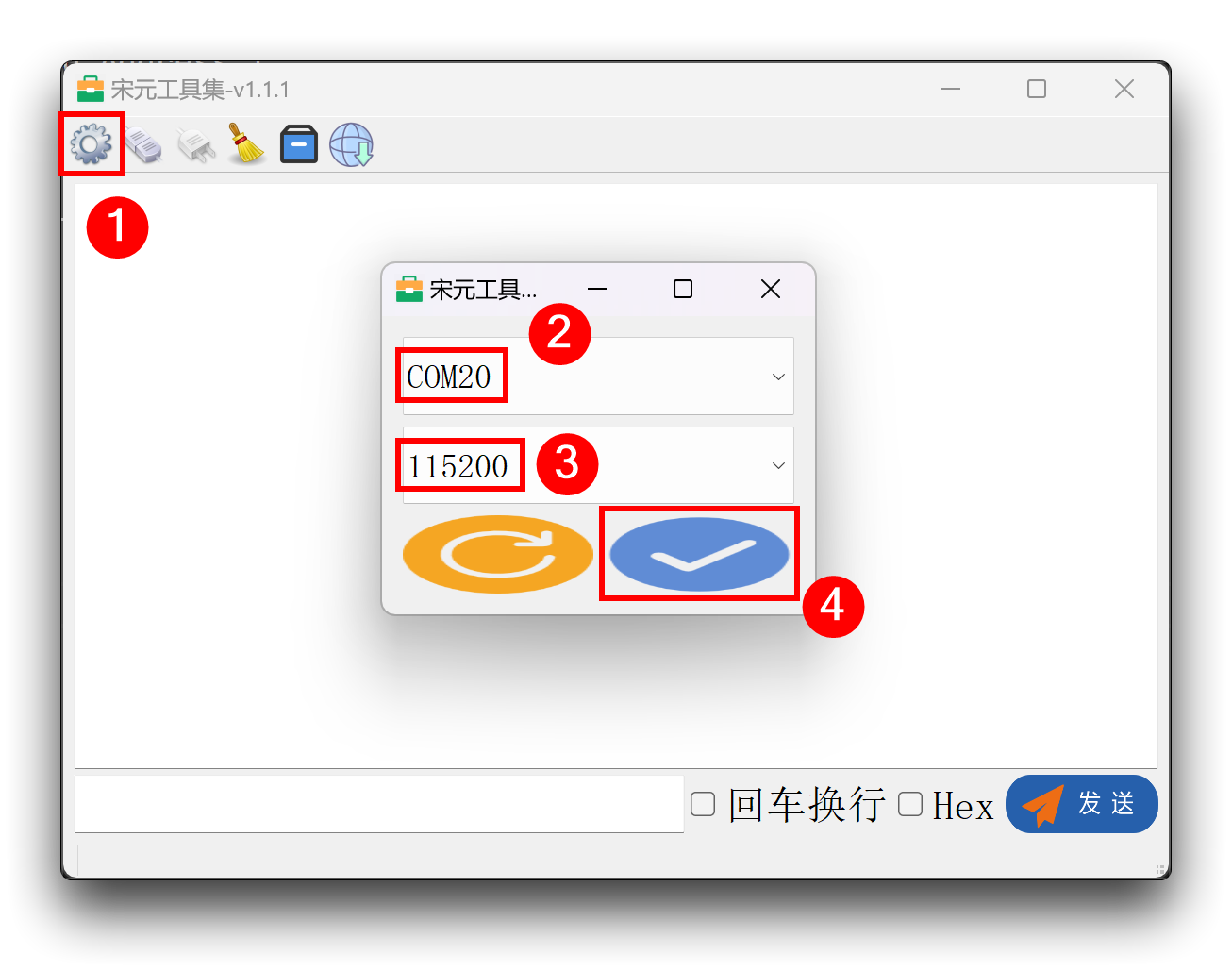
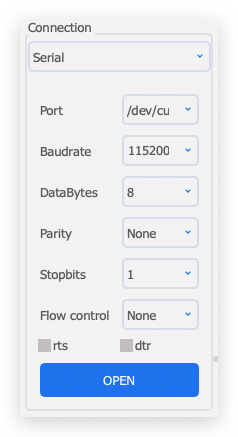
Conecte o UART para USB com o sensor conectado ao computador, clique no ícone de engrenagem no canto superior esquerdo do software, selecione o número da porta, defina a taxa de baud para 115200 e clique no canto inferior direito para confirmar. (Se o número da porta não for encontrado, verifique a conexão e clique no botão de atualização no canto inferior esquerdo para tentar novamente)
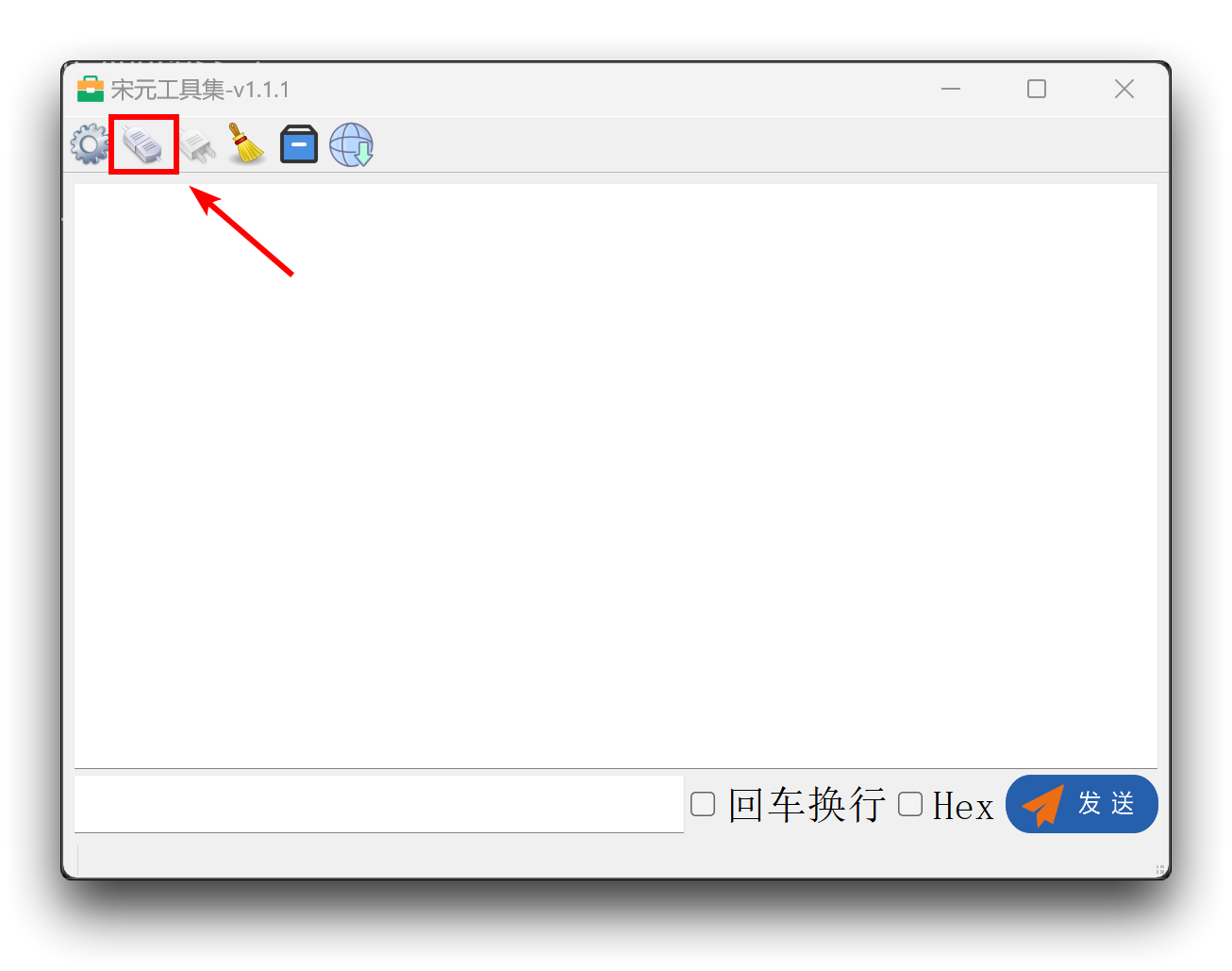
Passo 4. Conectando o sensor
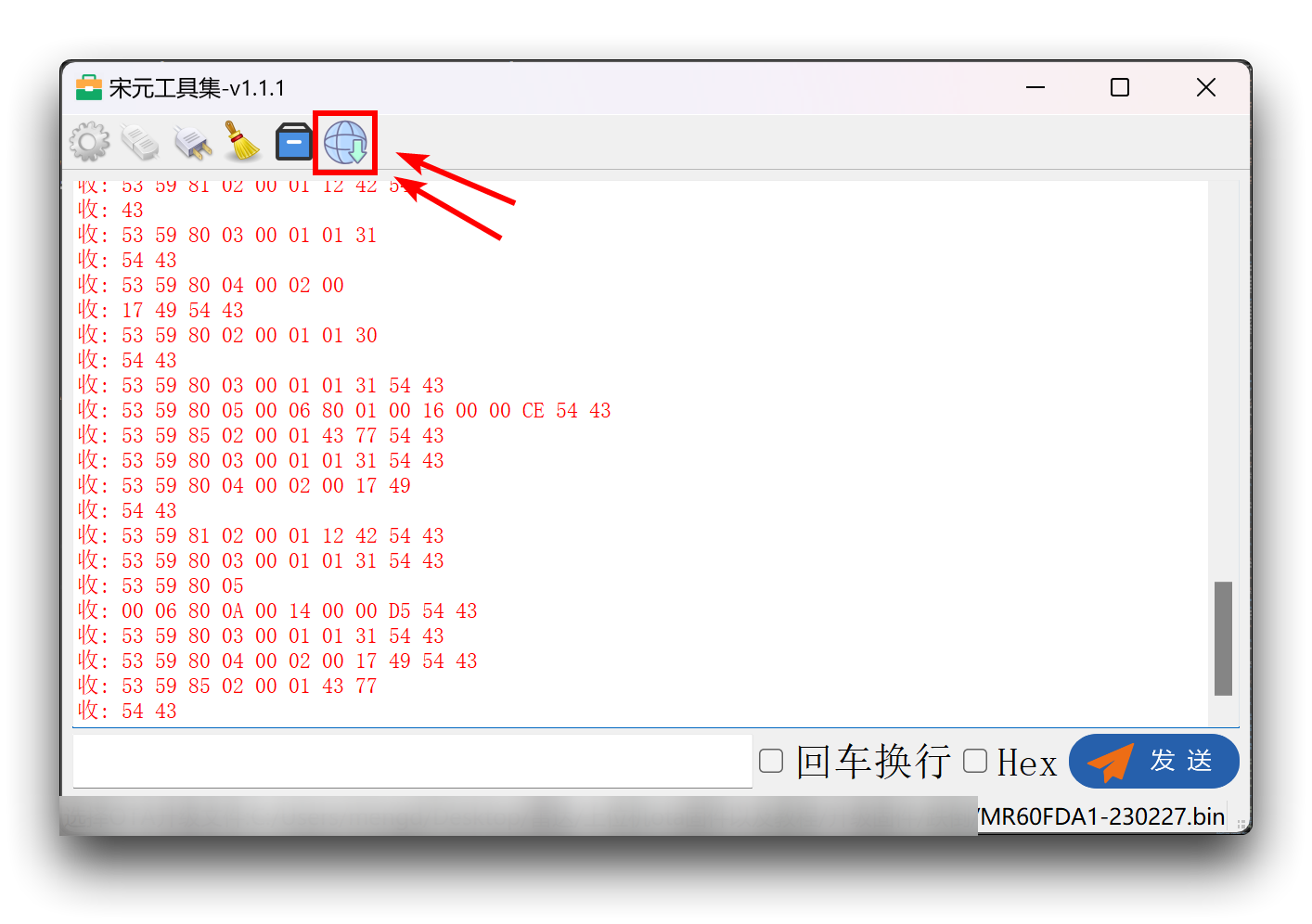
Depois de terminar a configuração da porta serial conforme descrito acima, clique no segundo ícone no canto superior direito e você verá os dados brutos do radar sendo exibidos se a porta tiver sido selecionada corretamente.
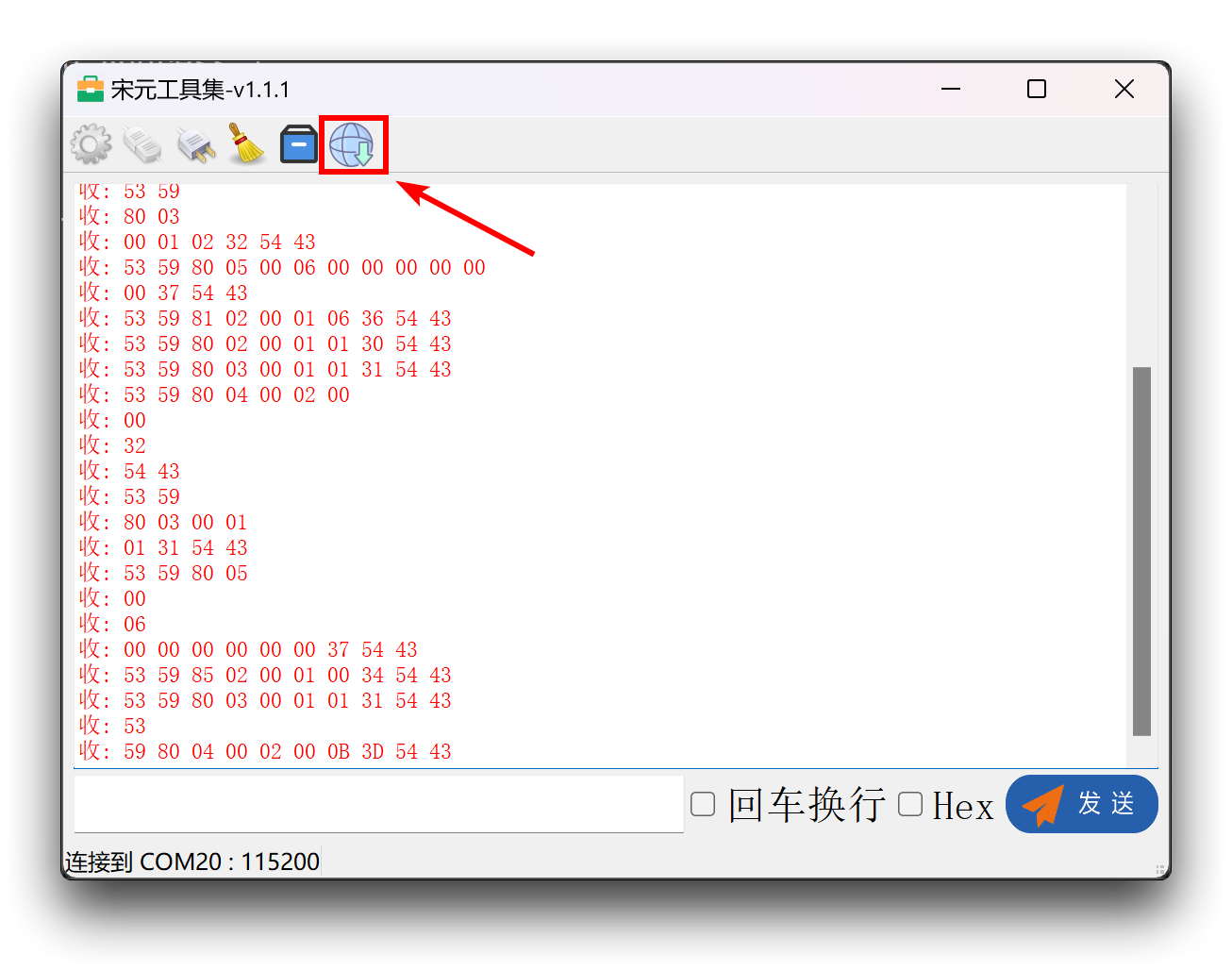
Etapa 5. Atualizar firmware
Clique no último ícone no canto superior direito com o botão esquerdo do mouse, isto abrirá uma janela para selecionar o firmware. Selecione a versão do firmware que você baixou.
Após concluir a seleção, o caminho do arquivo selecionado aparecerá abaixo do software, verifique novamente se a versão e o modelo do firmware selecionado são consistentes com o sensor que você está usando.
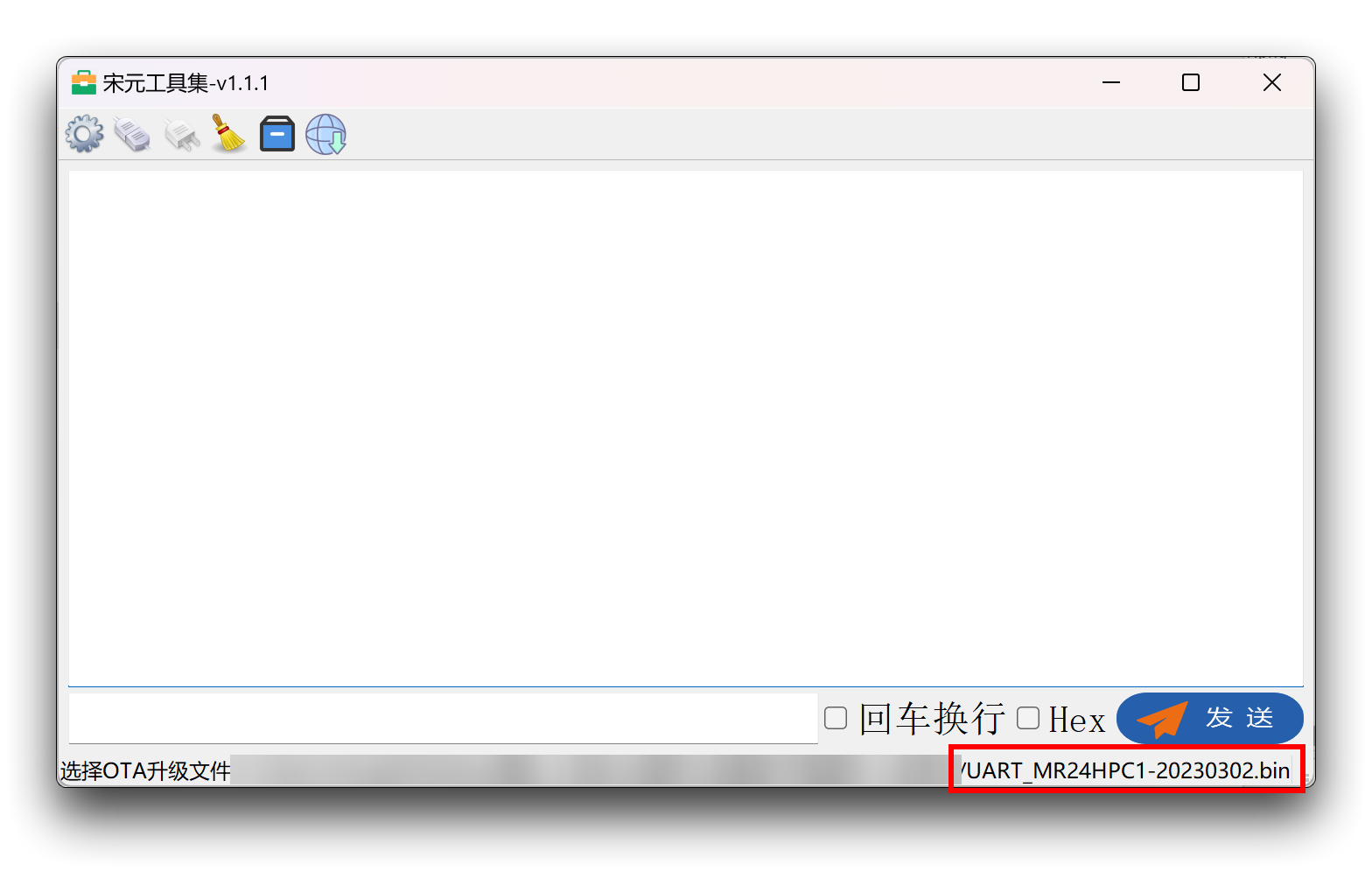
Para atualizar o firmware, clique duas vezes com o botão esquerdo do mouse na última imagem na parte superior esquerda do software, então o firmware começará a ser baixado para o sensor.
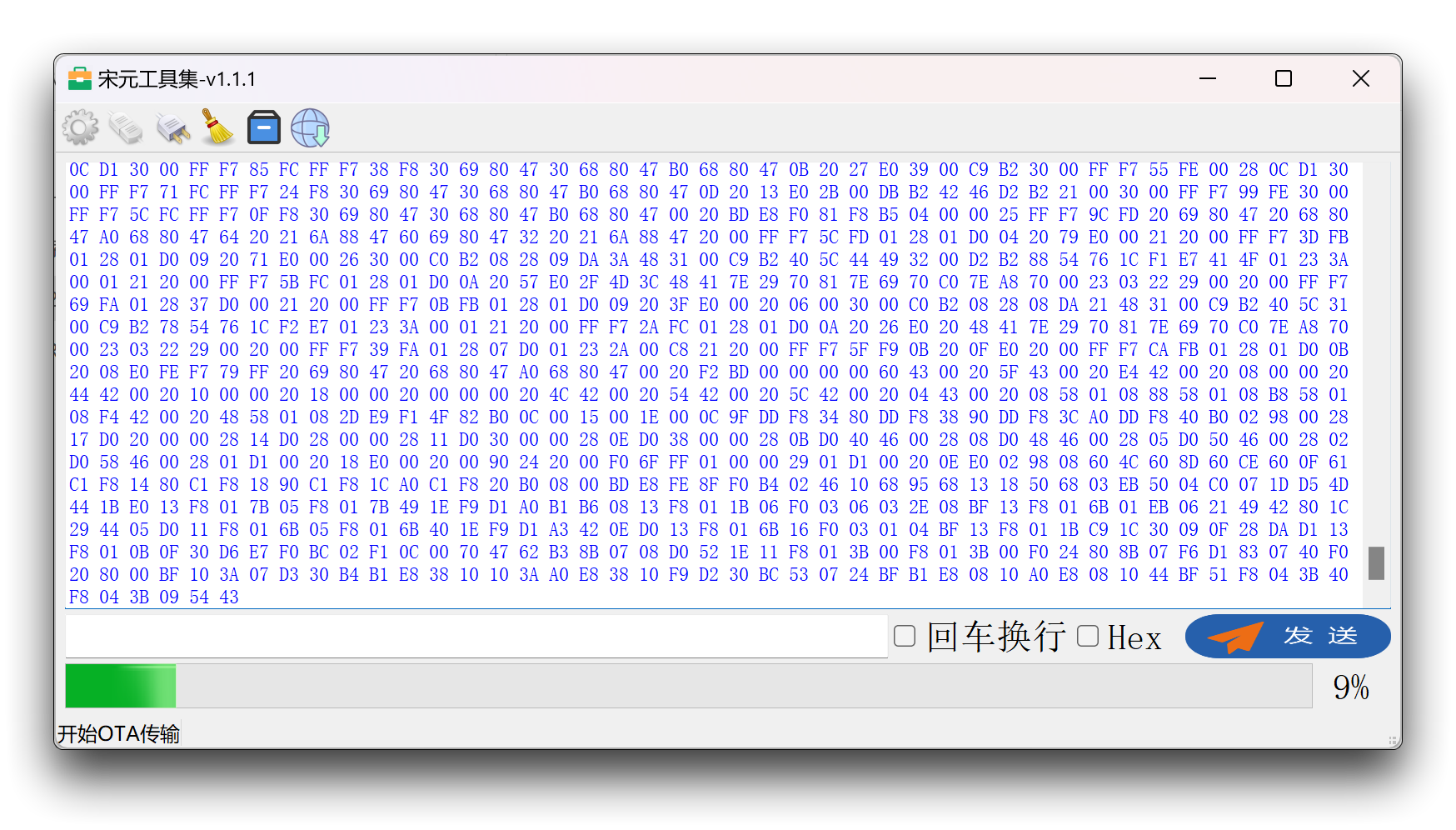
Espere a barra de progresso terminar e a atualização do firmware estará concluída.
Uso do computador superior
Conecte o radar diretamente à porta USB do computador por meio de um dispositivo UART to USB. A fiação é mostrada na tabela abaixo.
 | |||
| Radar Sensor | UART to USB | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | TX | |
| TX | --> | RX | |
Além do software serial mencionado acima, você também pode usar diretamente o software de computador superior projetado para o radar.
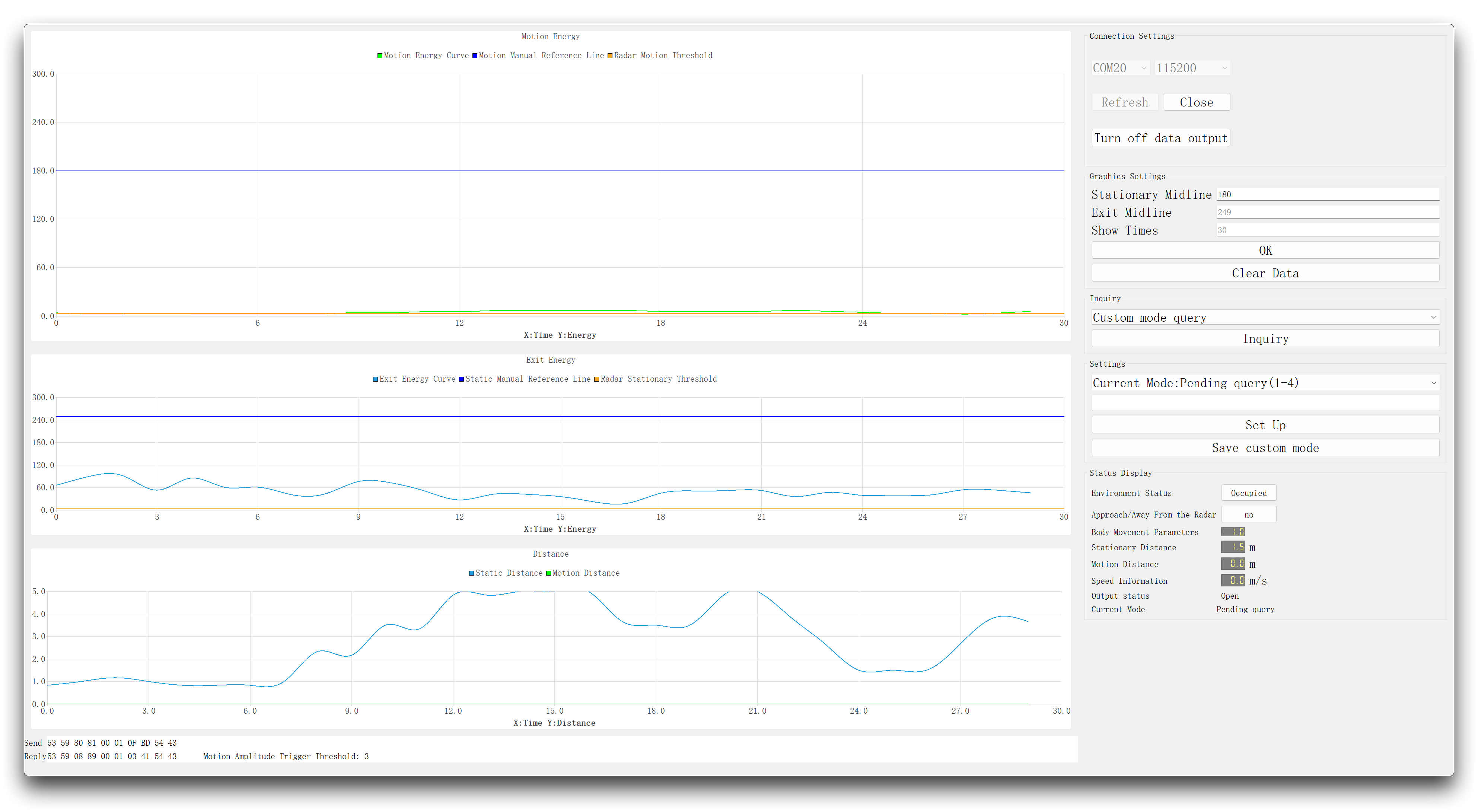
As dez seções a seguir explicam a função de cada parte do software.
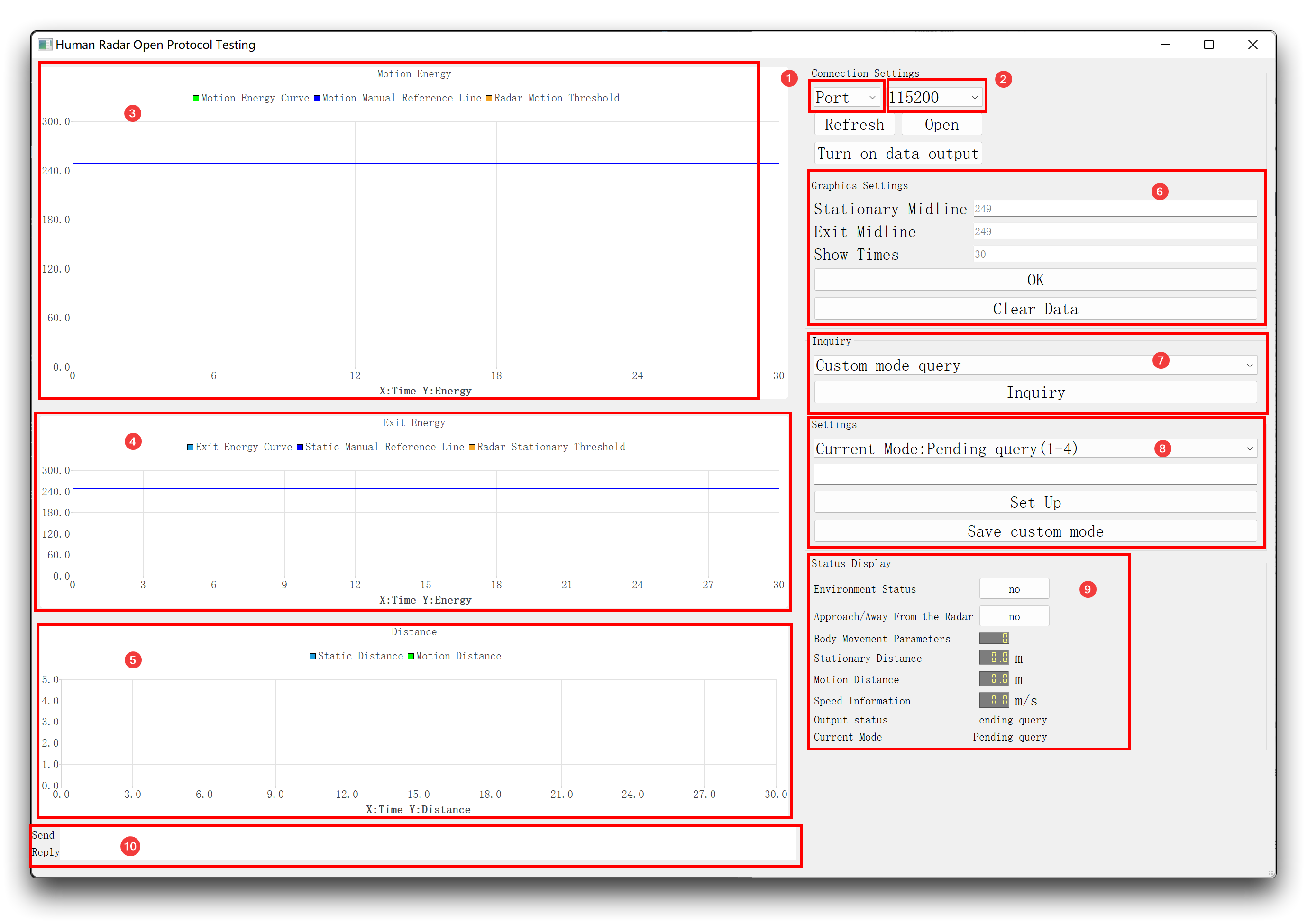
-
Porta
Selecione a porta à qual o radar está conectado ao computador. Geralmente é necessário atualizar a porta clicando no botão Refresh antes de selecioná-la. Uma vez selecionada, clique no botão Open.
-
Taxa de baud
O radar MR24HPC1 precisa ser configurado com uma taxa de baud de 115200.
-
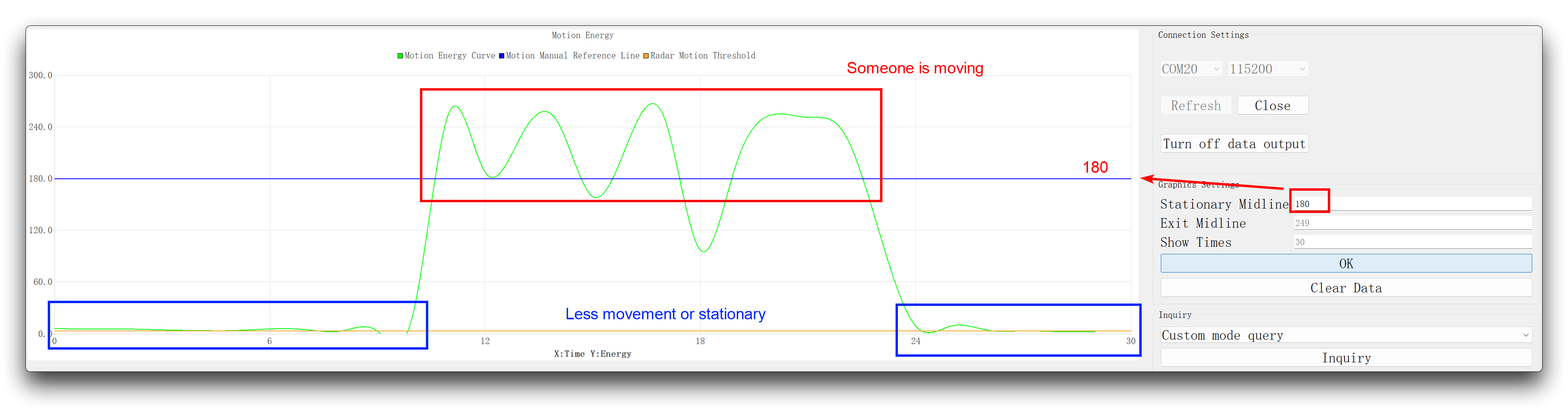
Energia de Movimento
Este valor é equivalente ao valor dinâmico. A variação deste valor representa o ruído de movimento constante no ambiente. A Energia de Movimento é baixa quando não há ninguém no espaço, e a Energia de Movimento geral fica mais alta à medida que o movimento aumenta em magnitude e distância.
-
Energia de Saída
Este valor é equivalente ao valor estático. A variação deste valor representa o ruído estático constante no ambiente. A Energia de Saída é baixa quando o espaço está desocupado, e a Energia de Saída geral oscila em valores mais altos quando há uma pessoa estacionária no espaço (leve movimento da respiração do peito).
-
Distância
Distância estacionária: A distância em linha reta entre o ambiente e o radar na presença de uma área em leve movimento. Quando há alguém parado em um local no espaço, a distância em linha reta até o radar é exibida em tempo real. Distância de movimento: A distância em linha reta entre uma posição em movimento no ambiente e o radar. Quando há uma pessoa em movimento em um local no espaço, a distância em linha reta até o radar é exibida em tempo real para esse local. a distância em linha reta até o radar.
-
Configurações Gráficas
Usado para determinar claramente a relação entre as formas de onda em tempo real e a relação de limiares. Com base nas mudanças da curva em tempo real, é possível observar a mudança no ruído de fundo em diferentes estados do espaço e, com base na mudança no ruído de fundo, é possível definir o limiar para a presença do corpo humano e fazer um julgamento simples da presença/ausência/atividade do estado estacionário.
-
Consulta
Pesquisar as configurações atuais de parâmetros. Para o significado dos valores de cada parâmetro, consulte o manual do usuário para obter detalhes por questões de espaço.
-
Configurações
Definir os valores de limiar para cada parâmetro.
-
Exibição de Status
Esta janela mostra em tempo real, entre outros valores, a distância, velocidade e status de movimento atuais.
-
Enviar & Responder
Os quadros de dados enviados e recebidos.
Desenvolvimento do sensor com Arduino
Visão geral da biblioteca Arduino
Se esta é a sua primeira vez usando Arduino, recomendamos fortemente que você consulte Getting Started with Arduino.
O código da biblioteca usado neste exemplo pode ser baixado clicando no ícone abaixo.
Função
Antes de começarmos a desenvolver um sketch, vamos ver as funções disponíveis da biblioteca.
-
void recvRadarBytes()—— Esta função coleta os quadros de dados reportados pelo Sensor via UART de acordo com os cabeçalhos e caudas de quadro no protocolo de dados do Sensor. Usada em conjunto com a funçãoshowData(), as informações de dados coletadas podem ser impressas pela porta serial.-
Parâmetros de entrada: Nenhum
-
Valor de retorno: Nenhum
-
-
void showData()—— Esta função serve para imprimir de uma só vez o quadro de dados completo reportado pelo Sensor via porta serial e precisa ser usada em conjunto com a funçãorecvRadarBytes().-
Parâmetros de entrada: Nenhum
-
Valor de retorno: Nenhum
-
-
void HumanStatic_func(bool bodysign /*=false*/)—— Esta função é responsável por analisar os quadros de dados do Sensor e exibir os dados relevantes sobre o estado da presença humana.-
Parâmetros de entrada:
bodysign—— Este parâmetro é uma chave que controla se os Parâmetros de Movimento Humano serão exibidos ou não. Se true, a saída conterá uma grande quantidade de dados de parâmetros de sinais humanos, o que pode afetar sua experiência de visualização dos dados. Por padrão, este parâmetro é false e nenhuma informação sobre os parâmetros de sinais do corpo é exibida. -
Valor de retorno:
-
int radarStatus—— O valor retornado indica a qual classe de status o quadro de dados analisado pertence. As categorias específicas podem ser encontradas na seção Variáveis Padrão. -
int bodysign_val—— O valor retornado representa o valor do Parâmetro de Movimento Humano. Este valor só é válido com o parâmetrobodysign=true. -
int static_val—— Este valor é equivalente ao valor estático. A variação deste valor representa o ruído estático constante no ambiente. A Energia de Saída é baixa quando o espaço está desocupado, e a Energia de Saída geral oscila em valores mais altos quando há uma pessoa estacionária no espaço (leve movimento da respiração do peito). Este valor só é válido se a Mensagem Subjacente Aberta estiver ativada. -
int dynamic_val—— A variação deste valor representa o ruído de movimento constante no ambiente. A Energia de Movimento é baixa quando não há ninguém no espaço, e a Energia de Movimento geral fica mais alta à medida que o movimento aumenta em magnitude e distância. Este valor só é válido se a mensagem subjacente aberta estiver ativada. -
int dis_static—— A distância em linha reta entre o ambiente e o Sensor na presença de uma área em leve movimento. Quando há alguém parado em um local no espaço, a distância em linha reta até o Sensor é exibida em tempo real. Este valor só é válido se a Mensagem Subjacente Aberta estiver ativada. -
int dis_move—— A distância em linha reta entre uma posição em movimento no ambiente e o Sensor. Quando há uma pessoa em movimento em um local no espaço, a distância em linha reta até o Sensor é exibida em tempo real para esse local. a distância em linha reta até o Sensor. Este valor só é válido se a Mensagem Subjacente Aberta estiver ativada. -
int speed—— Este valor indica a velocidade de movimento do objeto em movimento. O valor é apenas para referência. Este valor só é válido se a Mensagem Subjacente Aberta estiver ativada.
-
-
-
void checkSetMode_func(const unsigned char* buff, int len, bool cyclic /*= false*/)—— Esta função pode ser usada para enviar quadros de dados ao Sensor. Os quadros de dados enviados e os quadros de dados retornados são impressos via porta serial.-
Parâmetros de entrada:
-
buff—— O quadro de dados que você deseja enviar ao Sensor. -
len—— O comprimento do quadro de dados que você deseja enviar ao Sensor. -
cyclic—— Interruptor de envio cíclico. O padrão é false, que pode ser definido como true se você quiser enviar este quadro de dados ciclicamente.
-
-
Return value: Nenhum
-
-
void reset_func()—— A função serve para reiniciar o Sensor.-
Input parameters: Nenhum
-
Return value: Nenhum
-
Default Variables
#define MESSAGE_HEAD1 0x53 //Data frame header1
#define MESSAGE_HEAD2 0x59 //Data frame header2
#define MESSAGE_END1 0x54 //End1 of data frame
#define MESSAGE_END2 0x43 //End2 of data frame
#define HUMANSTATUS 0x80 //Human Presence Information
#define HUMANEXIST 0x01 //Presence of the human body
#define HUMANMOVE 0x02 //Human movement information
#define HUMANSIGN 0x03 //Body Signs Parameters
#define HUMANDIRECT 0x0B //Human movement trends
#define SOMEBODY 0x01 //Somebody move
#define NOBODY 0x00 //No one here
#define NONE 0x00
#define SOMEBODY_STOP 0x01 //Somebody stop
#define SOMEBODY_MOVE 0x02 //Somebody move
#define CA_CLOSE 0x01 //Someone approaches
#define CA_AWAY 0x02 //Some people stay away
#define DETAILSTATUS 0x08 //Underlying parameters of the human state
#define DETAILINFO 0x01 //Detailed data on the state of human movement
#define DETAILDIRECT 0x06 //Human movement trends
#define DETAILSIGN 0x07 //Body Signs Parameters
//Return status, Use in arduino
#define SOMEONE 0x01 //There are people
#define NOONE 0x02 //No one
#define NOTHING 0x03 //No message
#define SOMEONE_STOP 0x04 //Somebody stop
#define SOMEONE_MOVE 0x05 //Somebody move
#define HUMANPARA 0x06 //Body Signs Parameters
#define SOMEONE_CLOSE 0x07 //Someone approaches
#define SOMEONE_AWAY 0x08 //Some people stay away
#define DETAILMESSAGE 0x09 //Underlying parameters of the human state
#define reset_frame_len 10 //Reset data frame length
//Reset data frame
const unsigned char reset_frame[10] = {0x53, 0x59, 0x01, 0x02, 0x00, 0x01, 0x0F, 0xBF, 0x54, 0x43};
Installation
Step 1. Você precisa instalar o software Arduino.

Step 2. Inicie o aplicativo Arduino.
Step 3. Selecione o modelo da sua placa de desenvolvimento e adicione-o ao Arduino IDE.
-
Se você quiser usar Seeeduino V4.2 para as rotinas posteriores, consulte este tutorial para concluir a adição.
-
Se você quiser usar Seeeduino XIAO para as rotinas posteriores, consulte este tutorial para concluir a adição.
-
Se você quiser usar XIAO RP2040 para as rotinas posteriores, consulte este tutorial para concluir a adição.
-
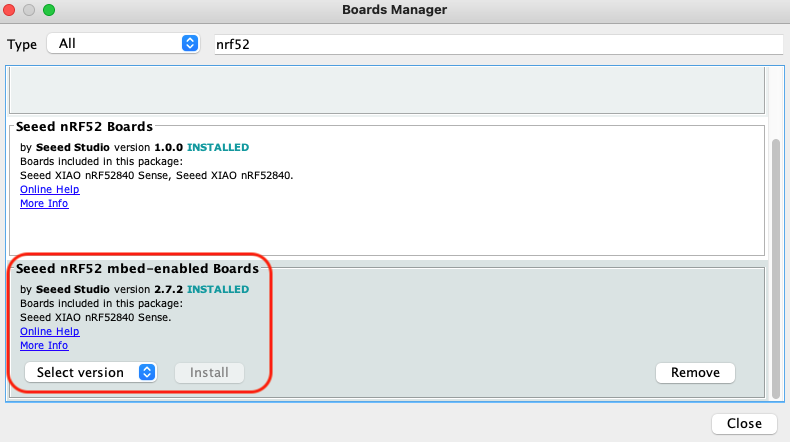
Se você quiser usar XIAO nRF52840 para as rotinas posteriores, consulte este tutorial para concluir a adição.
-
Se você quiser usar XIAO ESP32C3 para as rotinas posteriores, consulte este tutorial para concluir a adição.
Para XIAO nRF52840, selecione Seeed nRF52 mbed-enabled Boards, caso contrário pode ser relatado um erro ao executar programas.
Step 4. Instale a biblioteca de código Arduino.
Comece obtendo a base de código no GitHub e fazendo o download para o seu computador local.
Como você fez o download da biblioteca zip, abra o seu Arduino IDE, clique em Sketch > Include Library > Add .ZIP Library. Escolha o arquivo zip que você acabou de baixar e, se a biblioteca for instalada corretamente, você verá Library added to your libraries na janela de aviso. Isso significa que a biblioteca foi instalada com sucesso.

Arduino Example
Agora que temos nossa biblioteca instalada e entendemos as funções básicas, vamos executar alguns exemplos para o nosso XIAO nRF52840 Sense para ver como ele se comporta.
Materials Required
Antes de concluir os exemplos a seguir, você precisará preparar os seguintes materiais.
|  |  |
| MR24HPC1 | Seeed XIAO BLE nRF52840 Sense | Cabo Flat de Passo 2mm para 2,54mm |
Step 1. Conecte o dispositivo ao computador através da placa principal. O diagrama de fiação é mostrado na tabela abaixo.
 | |||
| MR24HPC1 | Main Board | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | D6 | |
| TX | --> | D7 | |
Step 2. Na barra de menu no canto superior esquerdo do Arduino IDE, selecione tool, escolha o tipo de placa de desenvolvimento que você está usando e selecione a porta serial correspondente.
Se você estiver usando MacOS, o nome da porta serial do dispositivo geralmente começará com /dev/cu.usbmodem xxx, terminando com o nome do dispositivo. Se você estiver usando Windows, o nome da porta serial do dispositivo geralmente começará com COM, novamente terminando com o nome do dispositivo.

Neste exemplo, demonstraremos como o Sensor funciona com o nosso produto popular XIAO nRF52840 Sense.
Demo 1: Impressão na porta serial de quadros de dados brutos da saída do Sensor
Este exemplo irá guiá-lo pelo processo de impressão dos dados brutos relatados pelo Sensor através da porta serial.
O seguinte programa de exemplo está na pasta de exemplos da biblioteca chamado MR24HPCB1_rawdata_print.
#include "Arduino.h"
#include <humanstaticLite.h>
//#include <SoftwareSerial.h>
// Choose any two pins that can be used with SoftwareSerial to RX & TX
//#define RX_Pin A2
//#define TX_Pin A3
//SoftwareSerial mySerial = SoftwareSerial(RX_Pin, TX_Pin);
// we'll be using software serial
//HumanStaticLite radar = HumanStaticLite(&mySerial);
// can also try hardware serial with
HumanStaticLite radar = HumanStaticLite(&Serial1);
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
Serial1.begin(115200);
// mySerial.begin(115200);
while(!Serial); //When the serial port is opened, the program starts to execute.
Serial.println("Ready");
}
void loop() {
// put your main code here, to run repeatedly:
radar.recvRadarBytes(); //Receive radar data and start processing
radar.showData(); //Serial port prints a set of received data frames
delay(200); //Add time delay to avoid program jam
}
Se você estiver usando a série XIAO ESP32 e não houver retorno de dados do radar mmwave, você pode tentar mudar o código acima de Serial1.begin(115200); para Serial1.begin(115200, SERIAL_8N1, D7, D6);.
Neste programa, estamos usando a porta de hardware Serial1 do XIAO nRF52840 para conectar ao Sensor e usar a porta de hardware Serial Serial para enviar dados, portanto precisamos inicializar esta porta serial separadamente na função de inicialização Setup().
Na função principal loop() usamos a função recvRadarBytes() para receber quadros de dados do Sensor e depois usamos a função showData() para imprimir os quadros de dados recebidos através da porta serial.
Neste programa, é importante observar que há um intervalo entre a recepção e a saída de cada dois quadros de dados para evitar um travamento na placa principal. Esse tempo não deve ser inferior a 150ms.
Isso significa que não há como a placa principal receber todos os quadros de dados relatados pelo Sensor, mas como o número de quadros relatados pelo Sensor é muito grande e frequente, isso não afeta a precisão do uso do Sensor para determinar o ambiente.
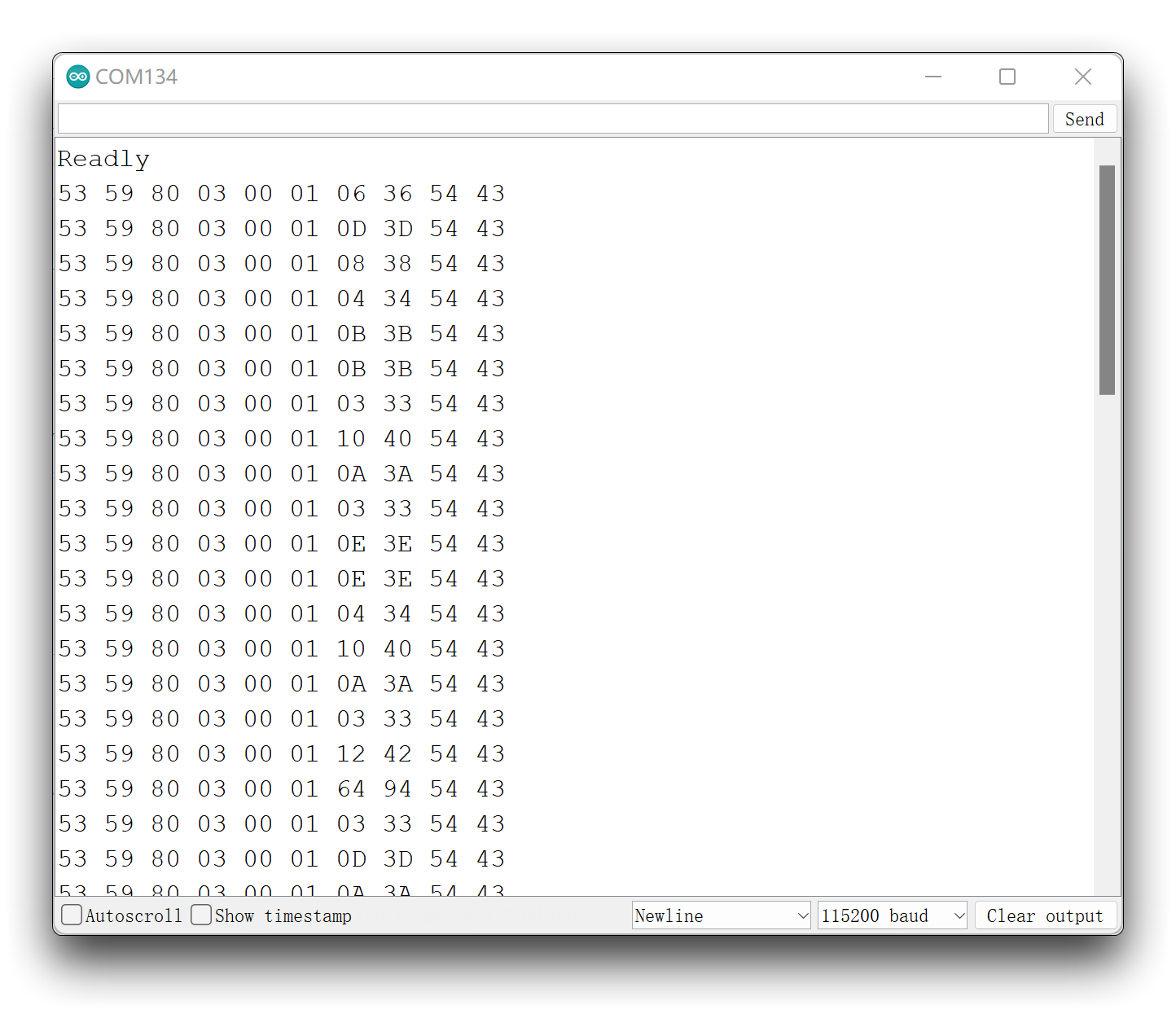
Envie o programa. Abrindo o monitor serial em uma taxa de transmissão de 115200 você deverá ver o resultado. A saída deverá ser semelhante à imagem abaixo.
Demo 2: Impressão pela porta serial das informações interpretadas de presença humana
Neste exemplo, usaremos as funções da biblioteca para analisar os quadros de dados recebidos e imprimir todos os dados de características reportados pelo Sensor ativo via porta serial.
O programa de exemplo a seguir está na pasta examples da biblioteca, chamado MR24HPCB1_parsed_rawdata.
#include "Arduino.h"
#include <humanstaticLite.h>
//#include <SoftwareSerial.h>
// Choose any two pins that can be used with SoftwareSerial to RX & TX
//#define RX_Pin A2
//#define TX_Pin A3
//SoftwareSerial mySerial = SoftwareSerial(RX_Pin, TX_Pin);
// we'll be using software serial
//HumanStaticLite radar = HumanStaticLite(&mySerial);
// can also try hardware serial with
HumanStaticLite radar = HumanStaticLite(&Serial1);
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
Serial1.begin(115200);
// mySerial.begin(115200);
while(!Serial); //When the serial port is opened, the program starts to execute.
Serial.println("Ready");
}
void loop() {
// put your main code here, to run repeatedly:
radar.HumanStatic_func(true); //Turn on printing of human movement sign parameters
if(radar.radarStatus != 0x00){
switch(radar.radarStatus){
Serial.println(radar.radarStatus);
case SOMEONE:
Serial.println("Someone is here.");
Serial.println("---------------------------------");
break;
case NOONE:
Serial.println("Nobody here.");
Serial.println("---------------------------------");
break;
case NOTHING:
Serial.println("No human activity messages.");
Serial.println("---------------------------------");
break;
case SOMEONE_STOP:
Serial.println("Someone stop");
Serial.println("---------------------------------");
break;
case SOMEONE_MOVE:
Serial.println("Someone moving");
Serial.println("---------------------------------");
break;
case HUMANPARA:
Serial.print("The parameters of human body signs are: ");
Serial.println(radar.bodysign_val, DEC);
Serial.println("---------------------------------");
break;
case SOMEONE_CLOSE:
Serial.println("Someone is closing");
Serial.println("---------------------------------");
break;
case SOMEONE_AWAY:
Serial.println("Someone is staying away");
Serial.println("---------------------------------");
break;
case DETAILMESSAGE:
Serial.print("Spatial static values: ");
Serial.println(radar.static_val);
Serial.print("Distance to stationary object: ");
Serial.print(radar.dis_static);
Serial.println(" m");
Serial.print("Spatial dynamic values: ");
Serial.println(radar.dynamic_val);
Serial.print("Distance from the movement object: ");
Serial.print(radar.dis_move);
Serial.println(" m");
Serial.print("Speed of moving object: ");
Serial.print(radar.speed);
Serial.println(" m/s");
Serial.println("---------------------------------");
break;
}
}
delay(200);
}
Se você estiver usando a série XIAO ESP32 e não houver retorno de dados do radar mmwave, você pode tentar alterar o código acima de Serial1.begin(115200); para Serial1.begin(115200, SERIAL_8N1, D7, D6);.
Para implementar a função de análise de dados, primeiro precisamos chamar a função HumanStatic_func(). O parâmetro passado pode ser true ou false para controlar se a exibição dos Parâmetros de Movimento Humano está habilitada ou não.
Se você optar por ligá-la, ou seja, passar o parâmetro true, poderá obter a seguinte mensagem na porta serial.
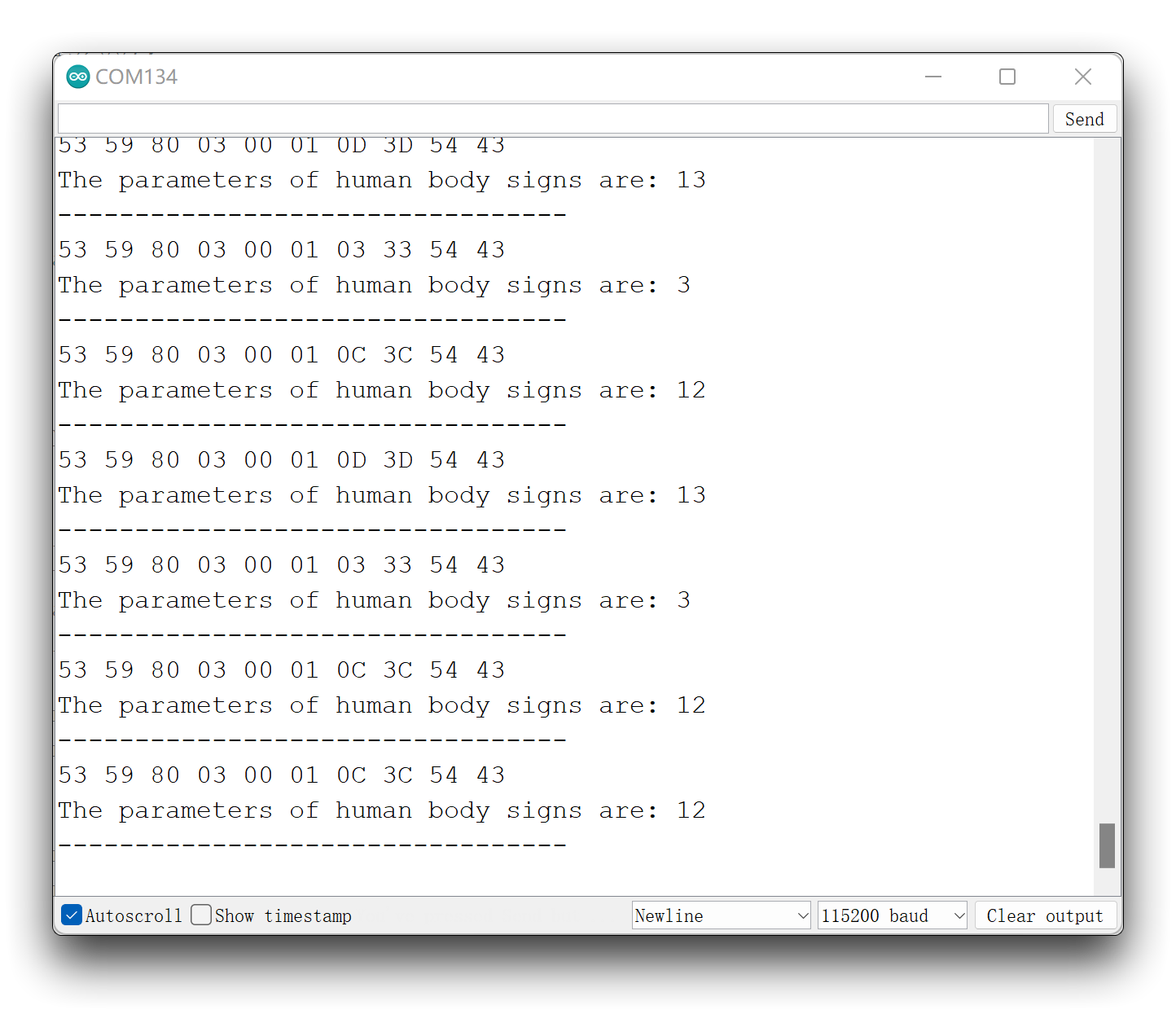
Parâmetros de Movimento Humano: valores de amplitude de movimento humano. Os Parâmetros de Movimento Humano são 0 quando não há ninguém no ambiente, 1-5 quando alguém está presente e parado, e 2-100 quando o corpo está em movimento (quanto maior a amplitude de movimento, mais próximo estará o parâmetro de movimento do corpo). Isso significa que, se você achar que os resultados do reconhecimento do Sensor não atendem às suas expectativas, pode exibir informações sobre a presença do corpo humano personalizando o julgamento dos Parâmetros de Movimento Humano.
Se você quiser interromper a saída intensa dos Parâmetros de Movimento Humano na porta serial, passe o parâmetro false e então poderá ver informações limpas sobre o status do corpo na porta serial.
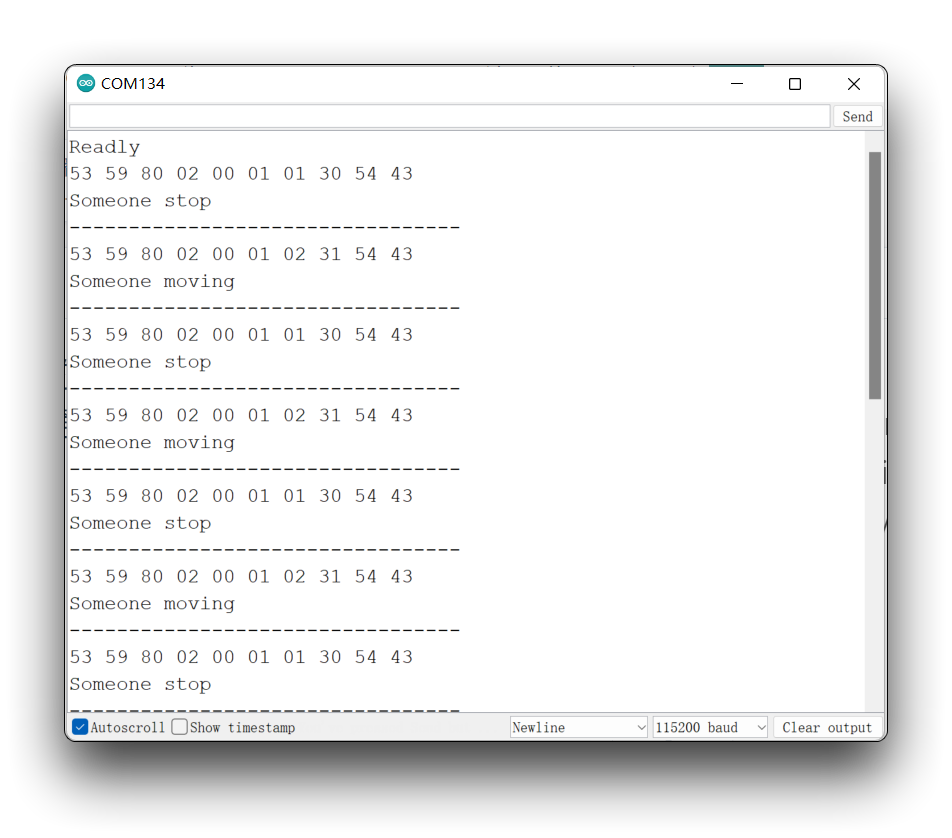
Talvez você não veja conteúdo impresso no monitor serial por um período longo; isso pode ser normal. O algoritmo incorporado ao Sensor é tal que as informações só são emitidas quando o estado de movimento do objeto monitorado muda. Se você estiver parado desde o upload do programa, tente se levantar, se movimentar e observar o efeito.
Também é possível que os dados que você recebeu sejam diferentes das informações mostradas nos dados das duas imagens acima. Nesse caso, é possível que você tenha ligado a chave de saída de Open Underlying Message.
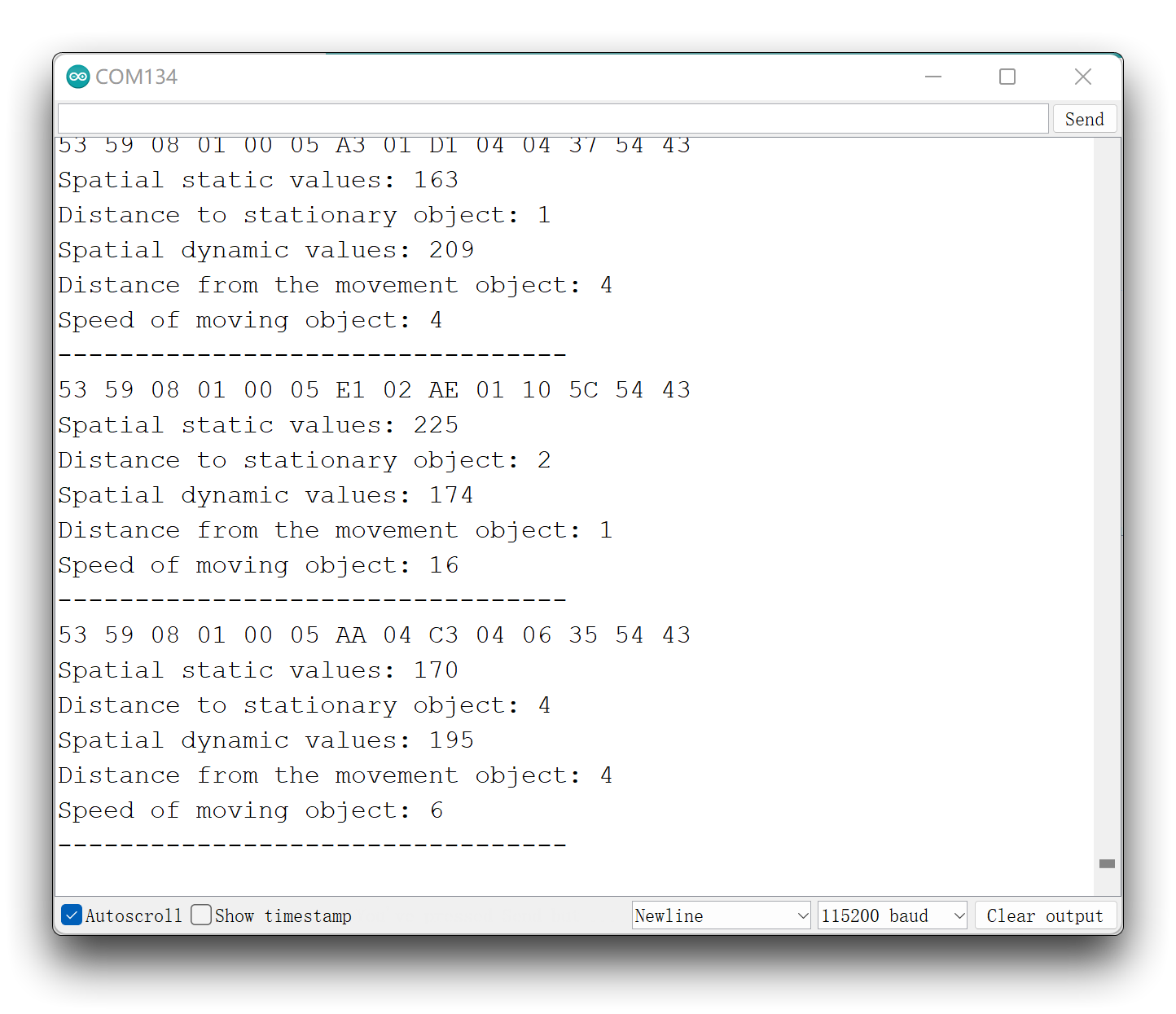
Para obter mais informações sobre como ligar e desligar o Open Underlying Message, consulte a seção relevante de Demo 3. Em resumo, ativar o Open Underlying Message significa que dados mais detalhados serão exportados.
Para o significado dos dados do Open Underlying Message, consulte a seção Function ou o manual do usuário deste Sensor, por motivos de espaço.
Demo 3: Enviar dados para o Sensor
O MR24HPC1 oferece uma grande variedade de funções de configuração de modo. Este exemplo explicará a implementação da chave Open Underlying Message como um exemplo de como enviar quadros de dados.
O programa de exemplo a seguir está na pasta examples da biblioteca, chamado MR24HPCB1_open_underlyingMes.
#include "Arduino.h"
#include <humanstaticLite.h>
//#include <SoftwareSerial.h>
// Choose any two pins that can be used with SoftwareSerial to RX & TX
//#define RX_Pin A2
//#define TX_Pin A3
//SoftwareSerial mySerial = SoftwareSerial(RX_Pin, TX_Pin);
// we'll be using software serial
//HumanStaticLite radar = HumanStaticLite(&mySerial);
// can also try hardware serial with
HumanStaticLite radar = HumanStaticLite(&Serial1);
const unsigned char close_buff[10] = {0x53, 0x59, 0x08, 0x00, 0x00, 0x01, 0x00, 0xB5, 0x54, 0x43}; //switch off Open Underlying Message
const unsigned char open_buff[10] = {0x53, 0x59, 0x08, 0x00, 0x00, 0x01, 0x01, 0xB6, 0x54, 0x43}; //switch on Open Underlying Message
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
Serial1.begin(115200);
// mySerial.begin(115200);
while(!Serial); //When the serial port is opened, the program starts to execute.
Serial.println("Ready");
}
void loop() {
// put your main code here, to run repeatedly:
radar.checkSetMode_func(open_buff, 10, false);
delay(50); //Do not set the delay time too long, as this may affect the reception of the data frames returned by the radar.
}
Se você estiver usando a série XIAO ESP32 e não houver retorno de dados do radar mmwave, você pode tentar alterar o código acima de Serial1.begin(115200); para Serial1.begin(115200, SERIAL_8N1, D7, D6);.
Antes de enviar dados para o Sensor, precisamos consultar o manual do usuário para obter os quadros de dados completos a serem enviados de acordo com nossas necessidades e definir um array no programa para armazenar os quadros de dados a serem enviados.
Neste exemplo, criamos dois arrays de quadros de dados de acordo com o manual do usuário. Sua função é ligar ou desligar a função Open Underlying Message.
const unsigned char close_buff[10] = {0x53, 0x59, 0x08, 0x00, 0x00, 0x01, 0x00, 0xB5, 0x54, 0x43}; //switch off Open Underlying Message
const unsigned char open_buff[10] = {0x53, 0x59, 0x08, 0x00, 0x00, 0x01, 0x01, 0xB6, 0x54, 0x43}; //switch on Open Underlying Message
Sobre o cálculo do dígito de verificação "sum".
Todos os quadros de dados têm um bit de verificação para garantir que os dados sejam enviados ou recebidos com precisão. O bit de verificação geralmente está no penúltimo byte do quadro de dados. Ele é calculado somando todos os bytes anteriores ao bit de verificação e pegando os dois dígitos inferiores em hexadecimal. Vamos tomar como exemplo um quadro de dados que consulta o ID do dispositivo.
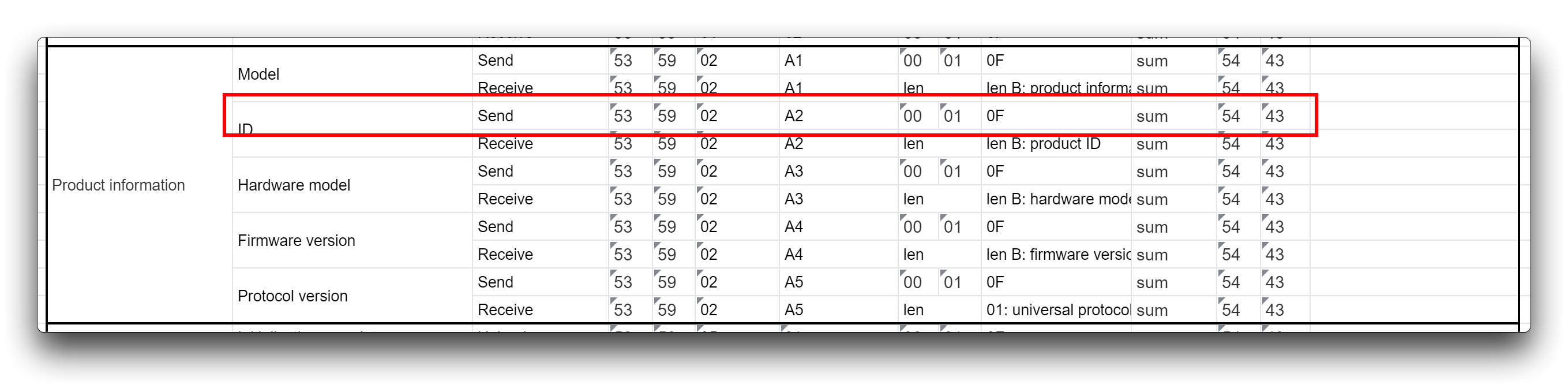
Pode-se ver que o bit de verificação está no penúltimo byte de todo o quadro de dados. Em seguida, começamos somando todos os números hexadecimais anteriores.
0x53 + 0x59 + 0x02 + 0xA2 + 0x00 + 0x01 + 0x0F = 0x0160
Então precisamos pegar os dois dígitos inferiores, que seriam 60, portanto o checksum deste quadro de dados é 60. Se quisermos consultar o ID do Sensor, você pode então definir o seguinte array.
const unsigned char DevID_buff[10] = {0x53, 0x59, 0x02, 0xA1, 0x00, 0x01, 0x0F, 0x60, 0x54, 0x43};
Em seguida, enviamos o quadro de dados chamando a função checkSetMode_func(). Os parâmetros passados são um array de quadros de dados, o comprimento do array e um valor booleano indicando se deve enviá-lo ciclicamente.
radar.checkSetMode_func(open_buff, 10, false);
Carregue o programa. Ao abrir o monitor serial com uma taxa de baud de 115200, o resultado deve ser exibido. A saída deve se parecer com a imagem abaixo.
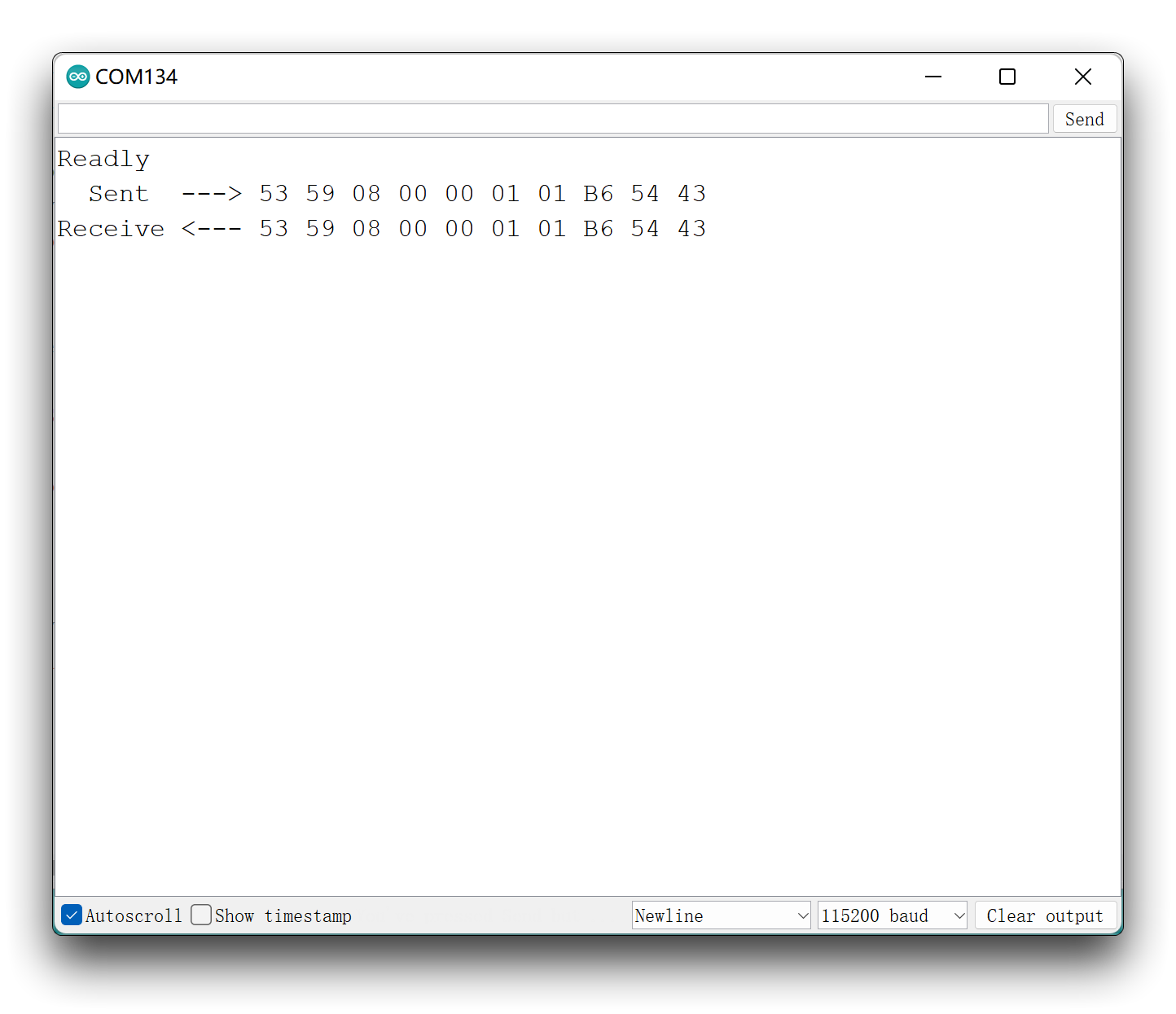
Neste ponto, verifique os quadros de dados retornados e, se eles corresponderem aos quadros de dados retornados conforme descrito no manual do usuário, então a configuração foi bem-sucedida.
Normalmente, nossos comandos não precisam ser repetidos para o Sensor, mas como o Sensor responde com mensagens tão rapidamente que não podemos ter certeza de que receberemos a mensagem de dados exata retornada pelo Sensor. Existem duas soluções para este problema.
- Recarregue o procedimento acima várias vezes.
- Defina o terceiro parâmetro da função
checkSetMode_func()(envio cíclico) comotrue. No entanto, observe que o envio repetido de quadros de dados do tipo de configuração pode fazer com que o Sensor trave, portanto use esta função com cautela. Se o Sensor travar, desconecte o pino de alimentação de 5V do Sensor e aguarde alguns instantes para que a função seja retomada.
Demo 4: Resetar o Sensor
Pode haver momentos em que você tenha problemas com o Sensor detectando anomalias ou quando quiser limpar todas as configurações do Sensor; então você pode resetar o Sensor de acordo com este exemplo.
O programa de exemplo a seguir está na pasta examples da biblioteca chamado MR24HPCB1_reset_radar.
#include "Arduino.h"
#include <humanstaticLite.h>
//#include <SoftwareSerial.h>
// Choose any two pins that can be used with SoftwareSerial to RX & TX
//#define RX_Pin A2
//#define TX_Pin A3
//SoftwareSerial mySerial = SoftwareSerial(RX_Pin, TX_Pin);
// we'll be using software serial
//HumanStaticLite radar = HumanStaticLite(&mySerial);
// can also try hardware serial with
HumanStaticLite radar = HumanStaticLite(&Serial1);
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
Serial1.begin(115200);
// mySerial.begin(115200);
while(!Serial); //When the serial port is opened, the program starts to execute.
Serial.println("Ready");
radar.reset_func();
}
void loop() {
// put your main code here, to run repeatedly:
}
Se você estiver usando a série XIAO ESP32 e não houver retorno de dados do radar mmwave, você pode tentar alterar o código acima de Serial1.begin(115200); para Serial1.begin(115200, SERIAL_8N1, D7, D6);.
Resetar o Sensor é muito simples, você só precisa chamar reset_func(). O reset precisa ser executado apenas uma vez, portanto o usamos na função Setup().
Demo 5: Usando Arduino/Seeeduino
Nossa biblioteca é compatível com Arduino e você também pode escolher o Arduino que tiver em mãos para desenvolver seu projeto com o Sensor.
O Sensor MR24HPC1 se comunica usando a porta serial UART, você só precisa conectar o Sensor ao seu Arduino conforme a fiação abaixo.
| MR24HPC1 | MCU | |
| 5V | --> | 5V |
| GND | --> | GND |
| RX | --> | soft serial port TX |
| TX | --> | soft serial port RX |
Todas as funções são aplicadas da mesma forma que em Demo 1 a Demo 4 acima, portanto não as repetiremos neste exemplo. Neste exemplo, daremos uma visão geral de como usar a porta serial por software do Arduino para obter informações de dados do Sensor.
Para observações sobre a porta serial por software do Arduino, consulte a documentação oficial do Arduino.
Para evitar confusão de dados causada por usar a Serial tanto para saída quanto para transmissão de dados, no lado do Arduino normalmente usamos uma porta serial por software.
A importação da biblioteca de porta serial por software e a definição dos pinos RX e TX precisam ser feitas anteriormente no programa. O programa a seguir define os pinos A2 e A3 como os pinos RX e TX da porta serial por software.
#include <SoftwareSerial.h>
//Choose any two pins that can be used with SoftwareSerial to RX & TX
#define RX_Pin A2
#define TX_Pin A3
SoftwareSerial mySerial = SoftwareSerial(RX_Pin, TX_Pin);
//we'll be using software serial
HumanStaticLite radar = HumanStaticLite(&mySerial);
Além disso, não se esqueça de definir a taxa de baud para a porta serial por software na função Setup().
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
mySerial.begin(115200);
while(!Serial); //When the serial port is opened, the program starts to execute.
Serial.println("Ready");
}
Usando o Demo 1 como exemplo, se você quiser usar o Arduino para imprimir os quadros de dados relatados pelo Sensor, então o programa completo é o seguinte.
#include "Arduino.h"
#include <humanstaticLite.h>
#include <SoftwareSerial.h>
// Choose any two pins that can be used with SoftwareSerial to RX & TX
#define RX_Pin A2
#define TX_Pin A3
SoftwareSerial mySerial = SoftwareSerial(RX_Pin, TX_Pin);
// we'll be using software serial
HumanStaticLite radar = HumanStaticLite(&mySerial);
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
mySerial.begin(115200);
while(!Serial); //When the serial port is opened, the program starts to execute.
Serial.println("Ready");
}
void loop() {
// put your main code here, to run repeatedly:
radar.recvRadarBytes(); //Receive radar data and start processing
radar.showData(); //Serial port prints a set of received data frames
delay(200); //Add time delay to avoid program jam
}
Demo 6: Conexão direta ao PC para dados
Você pode se referir a esta rotina se quiser usar um computador superior projetado para o Sensor, ou se quiser usar o software serial para obter um quadro de dados completo.
Conecte o Sensor diretamente à porta usb do computador por meio de um dispositivo UART para USB. A fiação é mostrada na tabela abaixo.
| |||
| Radar Sensor | UART to USB | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | TX | |
| TX | --> | RX | |
Use um software como assistente de depuração serial para selecionar a porta serial onde o Sensor está localizado.
O Sensor MR24HPC1 precisa de alimentação de 5V, caso contrário o Sensor pode não funcionar corretamente.
Após uma conexão bem-sucedida, você verá o Sensor enviando um fluxo constante de mensagens.
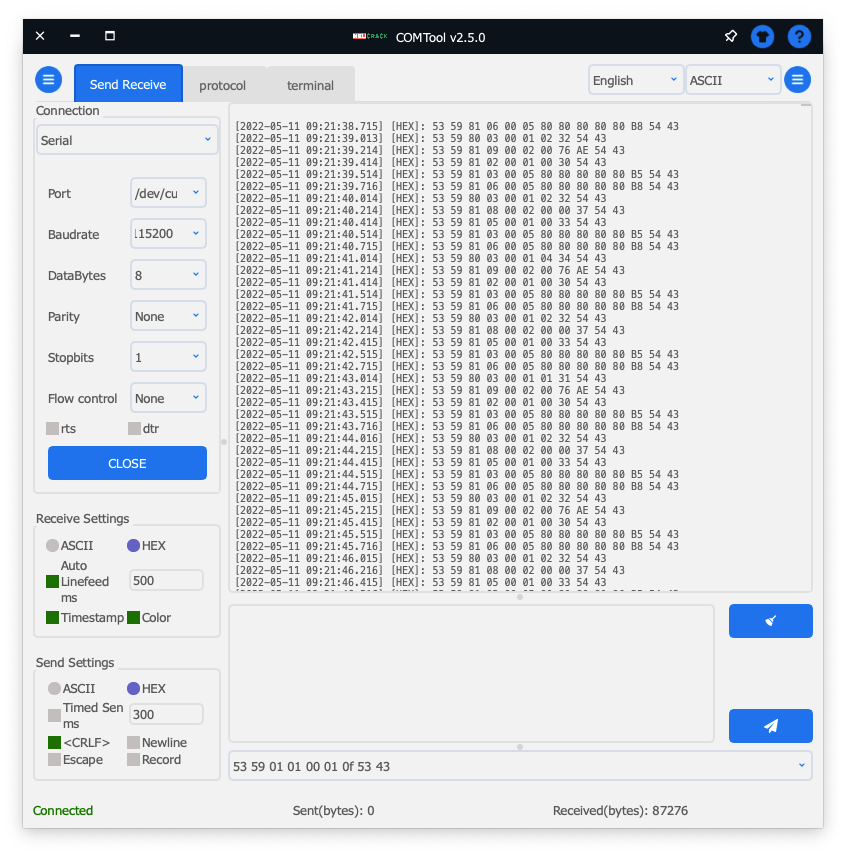
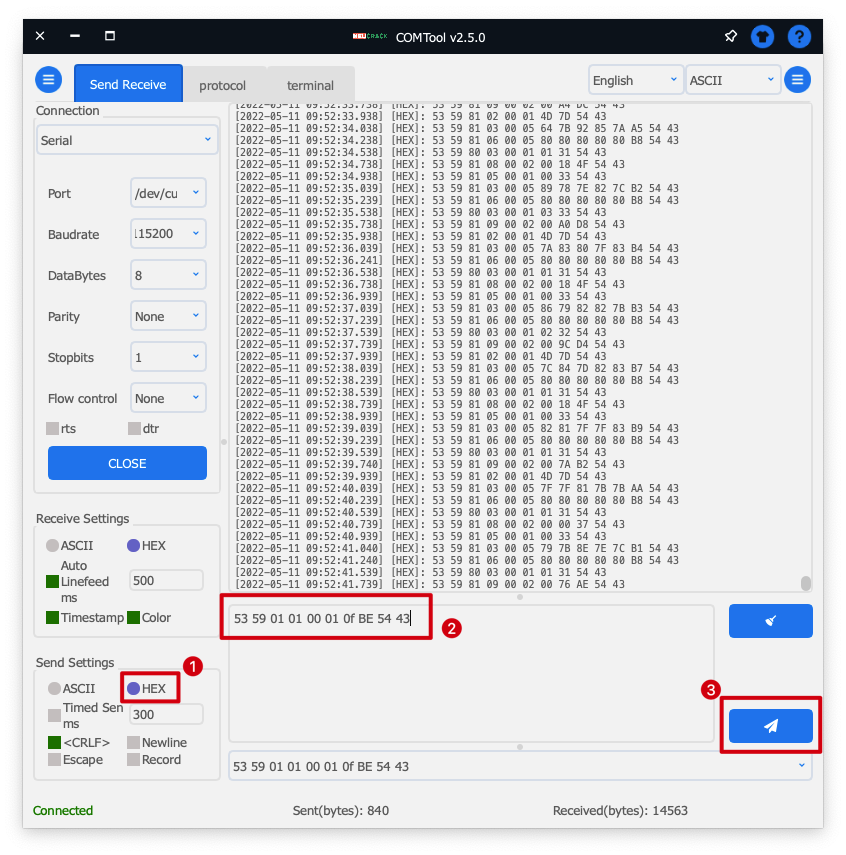
Ao mesmo tempo, você também pode enviar quadros de dados para o Sensor por meio da função de envio do software.
Demo 7: MR24HPBC1 & XIAO ESP32C3 & ESPHome & Home Assistant
Criamos um tutorial para conexão ao ESPHome e Home Assistant para este radar e o XIAO ESP32C3; se você estiver interessado, pode consultar o tutorial aqui.
Demo 8: Usando sensores no XIAO ESP32C3
Devido ao design especial da porta serial de hardware do XIAO ESP32C3, você precisará usar o código a seguir para poder usar a UART para enviar e receber mensagens de dados com o sensor.
#include "Arduino.h"
#include <humanstaticLite.h>
#include <HardwareSerial.h>
//HardwareSerial MySerial(0); // If you want to use D6 and D7 as serial pins, uncomment this line and comment the following line instead.
HardwareSerial MySerial(1); // Create a new HardwareSerial class
// can also try hardware serial with
HumanStaticLite radar = HumanStaticLite(&MySerial);
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
/*
* 4, 5 indicate GPIO4 and GPIO5, corresponding to pins D2 and D3.
* If you want to use the hardware UART pins of the XIAO ESP32C3 directly, you can change 4, 5 to -1, -1.
* MySerial.begin(115200, SERIAL_8N1, -1, -1);
*
* In addition to this you can also use the D9 (GPIO9) and D10 (GPIO10) pins as serial ports.
* MySerial1.begin(115200, SERIAL_8N1, 9, 10);
*/
MySerial.begin(115200, SERIAL_8N1, 4, 5);
while(!Serial); //When the serial port is opened, the program starts to execute.
delay(500);
Serial.println("Ready");
}
void loop() {
// put your main code here, to run repeatedly:
radar.recvRadarBytes(); //Receive radar data and start processing
radar.showData(); //Serial port prints a set of received data frames
delay(200); //Add time delay to avoid program jam
}
Solução de problemas
FAQ 1: Este Sensor pode detectar mais de uma pessoa ao mesmo tempo no mesmo ambiente?
A: Não disponível. Este sensor só pode ser usado em um único organismo vivo. Se mais de uma pessoa ou animal estiver dentro do alcance de monitoramento, isso terá efeito nos resultados do monitoramento.
FAQ 2: Por que não consigo ver nada no monitor serial com o XIAO ESP32C3?
A função de porta serial do XIAO ESP32C3 não é totalmente consistente com o hardware Arduino em geral, e usar Serial1 diretamente pode fazer com que a porta serial USB não funcione. Para casos de aplicação relacionados, acesse o capítulo Serial do XIAO ESP32C3 para mais detalhes.
FAQ 3: É possível usar outro chip em vez do XIAO ESP32-C3 para usar a biblioteca?
Sim, é realmente possível usar outros chips em vez do XIAO ESP32-C3 com a biblioteca. Apenas certifique-se de conectar os pinos RX/TX corretos ou dois pinos GPIO e definir a taxa de transmissão para 115200.
Confirme qual método usar, software ou hardware, por exemplo, se você tiver um Arduino Uno R3 que possui apenas uma porta serial, você pode implementar como abaixo:
#include "Arduino.h"
#include <humanstaticLite.h>
#include <SoftwareSerial.h>
// Choose any two pins that can be used with SoftwareSerial to RX & TX
#define RX_Pin A2
#define TX_Pin A3
SoftwareSerial mySerial = SoftwareSerial(RX_Pin, TX_Pin);
// we'll be using software serial
HumanStaticLite radar = HumanStaticLite(&mySerial);
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
mySerial.begin(115200);
}
void loop() {
// Your code here
}
Recursos
- [PDF] Modelo de Configuração Rápida
- [PDF] Folha de Dados
- [PDF] Manual do Usuário
- [EXE] software de computador host
- [ZIP] documentos de certificação CE
Suporte Técnico & Discussão sobre o Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.