Tricycle Bot

O Tricycle Bot é uma plataforma de robô DIY fácil de montar e compatível com Grove para educação. Ele inclui os materiais eletrônicos e estruturais que podem ser montados facilmente seguindo o guia. O Tricycle Bot possui três andares e cinco suportes entre o 2º e o 3º andar; no 3º andar podem ser fixados muitos módulos por meio de parafusos e porcas.
Além disso, você pode fixar a placa Arduino e a protoboard como o coração do robô no 2º andar, e cada suporte pode receber 1–2 módulos Grove plug‑n‑play como as “asas” do robô para reforçar suas funções, como o módulo Grove de LED RGB e ultrassônico. A tensão de alimentação do Tricycle Bot é fornecida por um suporte de bateria de 12 V.

Este kit NÃO inclui um controlador nem um driver de motor.
Recursos
- Suporte a múltiplas plataformas
- Suportes compatíveis com Grove
- Fácil de montar
- Opções de controle RF/BLE/Wi‑Fi
Lista de Peças

| Nome da peça | Especificação | Quantidade |
|---|---|---|
| Roda | Ф64mm*W30mm | 2 |
| Motor DC com redução | / | 2 |
| Roda universal | 49*32*22mm | 1 |
| Suporte de bateria | 62*58*30mm | 1 |
| Abraçadeiras | 20.5*31.8mm | 1 |
| Placa inferior (1º andar) | 220*155*3.8mm | 1 |
| Placa intermediária (2º andar) | 220*155*3.8mm | 1 |
| Placa superior (3º andar) | 160*158*3.8mm | 1 |
| Suporte frontal | 62*56*3.8mm | 1 |
| Suporte lateral | 62*31*3.8mm | 4 |
| Rebite_1 | R3090 | 4 |
| Espaçadores_2 | M3*22 | 6 |
| Espaçadores_3 | M3*55+6 | 4 |
| Parafuso_4 | PM3*8 | 14 |
| Parafuso_5 | PM3*25 | 4 |
| Porca_6 | M3*2.3 | 6 |
| Rebite_7 | R2064 | 15 |
| Parafuso_8 | KM2*10 | 15 |
| Porca_9 | M2*1.5 | 15 |
| Chave | / | 2 |
| Chave de fenda | / | 1 |
Este kit não inclui o Arduino/Genuino 101 nem a protoboard.
Instruções de Montagem


Você pode fixar quaisquer placas que desejar no Tricycle Bot para acionar esta plataforma de robô, como Arduino, Raspberry Pi e BeagleBone. E, para acionar os motores DC e os módulos Grove, o motor cape e o Grove cape são bons auxiliares para você.
Como há tantas placas para escolher, aqui faremos uma introdução de como escolher a placa adequada para você entre Arduino, Raspberry e BeagleBone.
Trabalhando com Arduino
Arduino é a plataforma de prototipagem open‑source mais famosa graças ao seu hardware e software fáceis de usar. Acreditamos que você pode criar facilmente um carro robô divertido e criativo com Arduino. E como temos tantos módulos Grove para Arduino, é conveniente expandir as funções do seu carro robô, como efeito de LED, detecção de obstáculos ou controle remoto (RF/Bluetooth/Wi‑Fi).
Seeeduino V4.2
O Seeeduino v4 é uma placa de desenvolvimento de MCU ATmega328 de código aberto e compatível com Arduino. Achamos que o Seeeduino v4 é um dos melhores derivados/compatíveis com Arduino disponíveis. O Seeeduino v4 é rico em recursos, muito mais estável, fácil de usar e até bonito.

Motor Shield V2.0
O Motor Shield é um módulo driver para motores que permite usar o Arduino para controlar a velocidade de trabalho e a direção do motor.

Base Shield V2
Como uma placa de expansão, o Base Shield v2 possui muitos conectores Grove, o que torna conveniente usar módulos Grove em conjunto. E é compatível com uma série de produtos Arduino.

Módulos Grove Recomendados
| Fita de LED W2812B | Sensor ultrassônico | Seguidor de linha |
|---|---|---|
 |  |  |
| COMPRE AGORA! | COMPRE AGORA! | COMPRE AGORA! |
| Buzzer | RF serial | Bluetooth serial |
|---|---|---|
 |  |  |
| COMPRE AGORA! | COMPRE AGORA! | COMPRE AGORA! |
Clique em Grove System para obter mais módulos disponíveis.
Trabalhando com Raspberry Pi
O Raspberry Pi é atualmente um dos computadores de placa única mais populares; ele tem desempenho de computação muito mais poderoso do que o Arduino. Como o Raspberry Pi é tão popular, você pode encontrar facilmente muitos tutoriais de projetos divertidos.
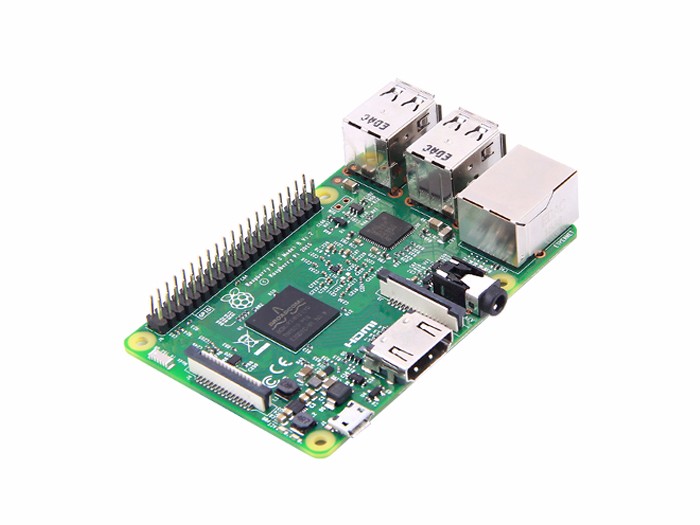
Raspberry Pi 3
O Raspberry Pi 3 inclui LAN sem fio 802.11 b/g/n integrada, Bluetooth Clássico e LE. Você não precisa de periféricos adicionais para torná‑lo sem fio. Ele possui desempenho 10 vezes superior ao do Raspberry Pi 1.
Placa de Motor Raspberry Pi v1.0
A Raspberry Pi Motor Board permite acionar dois motores DC com o seu Raspberry Pi, controlando a velocidade e a direção de cada um de forma independente.

GrovePi+
GrovePi+ é um sistema que leva módulos Grove ao Raspberry Pi. Ele adiciona suporte aos recém‑lançados Raspberry Pi Model B+ e Model A+.

Módulos Recomendados
| Webcam USB | Display OLED | Módulo GPS |
|---|---|---|
 |  |  |
| COMPRE AGORA! | COMPRE AGORA! | COMPRE AGORA! |
Clique em Grove System para obter mais módulos disponíveis.
Trabalhando com Placa BeagleBone
BeagleBone também é um dos computadores de placa única com Linux mais populares. Em comparação com o Raspberry, o BeagleBone tem uma vantagem na programação de módulos Grove, graças às suas bibliotecas Mraa e UPM.
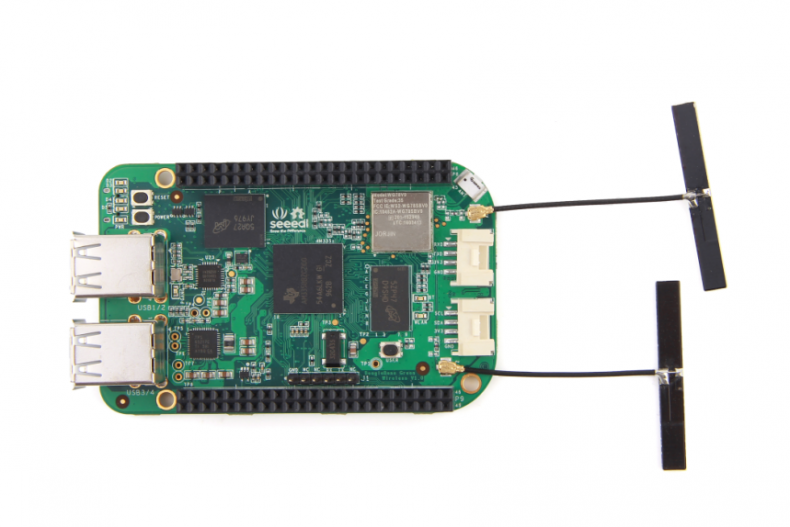
BeagleBone Green Wireless
O SeeedStudio BeagleBone Green Wireless é baseado no design de hardware open‑source do BeagleBone Black, mas possui uma interface WiFi/Bluetooth flexível e de alto desempenho, tornando mais fácil desenvolver controle remoto, como o BBGW Wi-Fi Car.
Motor Bridge Cape v1.0
O Motor Bridge Cape pode controlar dois motores de passo ou quatro motores DC escovados com alimentação DC de 6 a 15 V e cerca de 1 A de corrente por motor. Ele também possui seis interfaces de controle de servo e seis I\O de expansão, o que significa que você pode adicionar mais um braço robótico ao seu carro robô.

Grove Base Cape para BeagleBone v2
Grove Base Cape para BeagleBone v2 é uma placa de expansão do sistema Grove para a plataforma BeagleBone. Este cape torna conveniente conectar muitos transdutores (sensores e atuadores) disponíveis como módulos Grove à plataforma BeagleBone.

Módulos Grove Recomendados
| WEBCAM USB | FITA DE LED W2812B | IMU 9DOF |
|---|---|---|
 |  |  |
| COMPRE AGORA! | COMPRE AGORA! | COMPRE AGORA! |
| DISPLAY OLED | SENSOR DIGITAL DE LUZ | MÓDULO GPS |
|---|---|---|
 |  |  |
| Adquira agora! | Adquira agora! | Adquira agora! |
Clique em Grove System para obter mais módulos disponíveis.
Exemplo Simples
Aqui está um exemplo simples de como fazer um Tricycle Bot com um Arduino UNO.
Coisas de que precisamos

- Arduino UNO *1
- Motor Shield V2.0 *1
- Base Shield V2 *1
Montagem

- Monte o Tricycle Bot.
- Fixe os módulos Grove nas laterais e na placa superior.
- Conecte o Grove Buzzer ao D4, o Grove Ultrasonic Ranger ao D5 e a tira de LED ao D6 do Base Shield.
- Pronto!

Demonstração
Este é o vídeo deste exemplo simples.
- Este carro de demonstração Tricycle Bot é capaz de detectar o obstáculo à sua frente e fazer uma curva quando a distância for menor que 35 CM.
- Quando o carro estiver em linha reta, a tira de LED piscará em azul, enquanto quando o carro estiver fazendo uma curva, a tira de LED piscará em vermelho e o Grove Buzzer emitirá um som de alerta.
Programação
- Baixe a biblioteca Arduino de Motor Shield V2, Grove - Ultrasonic Ranger e LED Strip.
/*
* TricycleBotDemo.ino
*
* Simple code for Tricycle Bot
*
* Copyright (c) 2016 Seeed Technology Limited.
* MIT license
*
*/
#include "MotorDriver.h"
#include "Adafruit_NeoPixel.h"
#include "Ultrasonic.h"
#define BEE 4
#define LEDPIN 6
#define LEDNUM 10
#define PIXELS_SPACE 128
#define BRIGHTNESS 150
#define DistanceCM 35
Adafruit_NeoPixel strip = Adafruit_NeoPixel(LEDNUM, LEDPIN, NEO_GRB + NEO_KHZ800);
MotorDriver motor;
Ultrasonic ultrasonic(5);
void setup() {
// put your setup code here, to run once:
pinMode(BEE, OUTPUT);
strip.setBrightness(BRIGHTNESS);
strip.begin();
strip.show();
motor.begin();
pixelStart();
}
void loop() {
// put your main code here, to run repeatedly:
long RangeInCentimeters;
RangeInCentimeters = ultrasonic.MeasureInCentimeters();
if (RangeInCentimeters < DistanceCM) {
turnRight();
beep();
pixelState2();
}
else {
goStraight();
pixelState1();
}
delay(100);
}
void goStraight() {
motor.speed(0, 100);
motor.speed(1, 100);
}
void turnRight() {
motor.speed(0, -100);
motor.speed(1, 100);
}
//go straight
void pixelState1() {
for (uint32_t t = 0; t < (PIXELS_SPACE * LEDNUM); ++t) {
for (int i = 0; i < (LEDNUM / 2); i++) {
strip.setPixelColor(((LEDNUM / 2) - i -1) , triangular_color((t + i * PIXELS_SPACE) % (PIXELS_SPACE * LEDNUM)));
strip.setPixelColor(i + 5, triangular_color((t + i * PIXELS_SPACE) % (PIXELS_SPACE * LEDNUM)));
}
strip.show();
}
}
//turn right
void pixelState2() {
for (int i = 0; i < 3; i++) {
for (int j = 0; j < LEDNUM; j++) {
strip.setPixelColor(j, 250, 0, 0);
strip.show();
}
delay(50);
for (int j = 0; j < LEDNUM; j++) {
strip.setPixelColor(j, 0, 0, 0);
strip.show();
}
delay(50);
}
}
void pixelStart() {
for (int i = 0; i < LEDNUM; i++) {
for (int j = 0; j< 255; j++) {
strip.setPixelColor(i, 0, j, 0);
strip.show();
}
delay(50);
}
}
uint32_t triangular_color(uint32_t t) {
uint32_t c = 0;
if (t < 256) {
c = strip.Color(0, 0, t);
} else if (t < 512) {
c = strip.Color(0, 0, 511 - t);
}
return c;
}
void beep() {
digitalWrite(BEE, HIGH);
delay(100);
digitalWrite(BEE, LOW);
}
Anexos
Suporte Técnico e Discussão sobre o Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.