XIAO nRF52840(sense) com Zephyr(RTOS)

O que é RTOS
Um dos componentes mais importantes dos sistemas embarcados atuais é o RTOS, também conhecido como Real-Time Operating System (Sistema Operacional em Tempo Real), que é responsável por tudo, desde o agendamento de tarefas até a execução de aplicações.
O RTOS é projetado para fornecer um modo de execução previsível. Quando o processamento precisa atender ao limite de tempo do sistema, utiliza‑se um RTOS. Portanto, em comparação com um GPOS (General Purpose Operating System), o RTOS costuma ser leve e pequeno, e em geral fornece apenas as funções necessárias para executar tipos específicos de aplicações em um hardware específico. Em alguns casos, os desenvolvedores podem modificar o RTOS existente, reduzi‑lo para fornecer apenas a funcionalidade exigida por uma aplicação específica e/ou personalizar suas características de funcionalidade ou desempenho.
O que é o Zephyr
O sistema operacional Zephyr é baseado em um kernel de pequeno porte projetado para uso em sistemas embarcados e com recursos limitados: desde simples sensores ambientais embarcados e wearables com LED até sofisticados controladores embarcados, smartwatches e aplicações sem fio de IoT.
Funcionalidades
O Zephyr oferece um grande e sempre crescente número de funcionalidades, incluindo:
Extenso conjunto de serviços de Kernel
O Zephyr oferece vários serviços familiares para desenvolvimento:
- Serviços de multithreading para threads cooperativas, baseadas em prioridade, não preemptivas e preemptivas, com fatiamento de tempo opcional em round‑robin. Inclui suporte de API compatível com POSIX pthreads.
- Serviços de interrupção para registro, em tempo de compilação, de tratadores de interrupção.
- Serviços de alocação de memória para alocação dinâmica e liberação de blocos de memória de tamanho fixo ou variável.
- Serviços de sincronização entre threads para semáforos binários, semáforos contadores e semáforos de mutex.
- Serviços de passagem de dados entre threads para filas de mensagens básicas, filas de mensagens aprimoradas e fluxos de bytes.
- Serviços de gerenciamento de energia, como Gerenciamento de Energia do Sistema de forma geral, definida pela aplicação ou por política, e Gerenciamento de Energia de Dispositivo, definido de forma granular pelo driver.
Vários algoritmos de escalonamento
O Zephyr fornece um conjunto abrangente de opções de escalonamento de threads:
- Escalonamento cooperativo e preemptivo
- Earliest Deadline First (EDF)
- Escalonamento Meta IRQ implementando o comportamento de “interrupt bottom half” ou “tasklet”
- Fatiamento de tempo (Timeslicing): permite fatiamento de tempo entre threads preemptíveis de prioridade igual
- Várias estratégias de enfileiramento:
- Fila pronta com lista ligada simples
- Fila pronta com árvore rubro‑negra
- Fila pronta tradicional de múltiplas filas
Suporte a Bluetooth Low Energy 5.0
Compatível com Bluetooth 5.0 (ESR10) e suporte a Bluetooth Low Energy Controller (camada de enlace LE). Inclui Bluetooth Mesh e um controlador Bluetooth pronto para qualificação Bluetooth.
- Generic Access Profile (GAP) com todos os possíveis papéis LE
- Generic Attribute Profile (GATT)
- Suporte a pareamento, incluindo o recurso Secure Connections do Bluetooth 4.2
- Abstração limpa de driver HCI
- Interface HCI bruta para executar o Zephyr como um Controller em vez de uma pilha Host completa
- Verificado com vários controladores populares
- Altamente configurável
Suporte a Mesh:
- Recursos de Relay, Friend Node, Low-Power Node (LPN) e GATT Proxy
- Ambos os portadores de Provisioning suportados (PB-ADV e PB-GATT)
- Altamente configurável, cabendo em dispositivos com pelo menos 16k de RAM
Referência: Zephyr Project
Primeiros Passos
Depois que a toolchain do Zephyr estiver configurada e um SDK associado tiver sido baixado, você pode começar o desenvolvimento de aplicações.
Para o Xiao nrf52840, o arquivo de descrição da placa pode ser usado como referência para obter mais informações de configuração.
Para programar o Xiao nrf52840, você pode seguir as etapas abaixo:
- Compile um exemplo ou a sua aplicação
- Conecte o Xiao nrf52840
- Dê um clique duplo no botão
RSTpara colocar o dispositivo no modo bootloader uf2 - Execute o comando
west flash -r uf2para gravar o dispositivo
O exemplo mais simples é executar o exemplo "Hello World" na placa. Após mudar para o diretório da instalação do Zephyr, execute os seguintes comandos.
west build -p always -b xiao_ble samples/hello_world
Se você estiver utilizando uma placa Xiao nRF52840 Sense, pode compilar para o arquivo de definição de placa dela usando xiao_ble/nrf52840/sense no lugar de xiao_ble, da seguinte forma (para este exemplo não faz diferença):
west build -p always -b xiao_ble/nrf52840/sense samples/hello_world
Depois que isso for concluído, entre no modo bootloader uf2 e digite:
west flash -r uf2
Encontre a porta do seu dispositivo; no caso do Ubuntu isso pode ser feito via: ls /dev/tty* e confirmando qual dispositivo aparece quando o seu USB é conectado.
No meu exemplo eu vejo /dev/ttyACM0:
Usando o screen você pode então se conectar e monitorar a resposta serial:
screen /dev/ttyACM0 115200
Você deverá ver uma resposta semelhante à seguinte:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
Hello World! xiao_ble/nrf52840
Para auxiliar no processo de uso do Zephyr com o Xiao e sua placa de expansão, foi construído um repositório com vários overlays e configurações usados aqui. Os comandos incluídos neste artigo da wiki assumem que ele está localizado em ../applications/xiao-zephyr-examples em relação à raiz do Zephyr. Um caminho alternativo pode ser fornecido aos comandos abaixo atualizando‑o.
git clone https://github.com/Cosmic-Bee/xiao-zephyr-examples
Preparação de Hardware
| Seeed Studio XIAO nrf52840 Sense | Placa de Expansão Seeed Studio |
|---|---|
 |  |
Conhecimentos para o Desenvolvedor
Placa de Expansão XIAO
Para usar módulos Grove com o Seeed Studio XIAO nrf52840, utilizaremos uma Seeed Studio Expansion Base for XIAO e conectaremos o XIAO nrf52840 nela.
Depois disso, os conectores Grove na placa podem ser usados para conectar módulos Grove
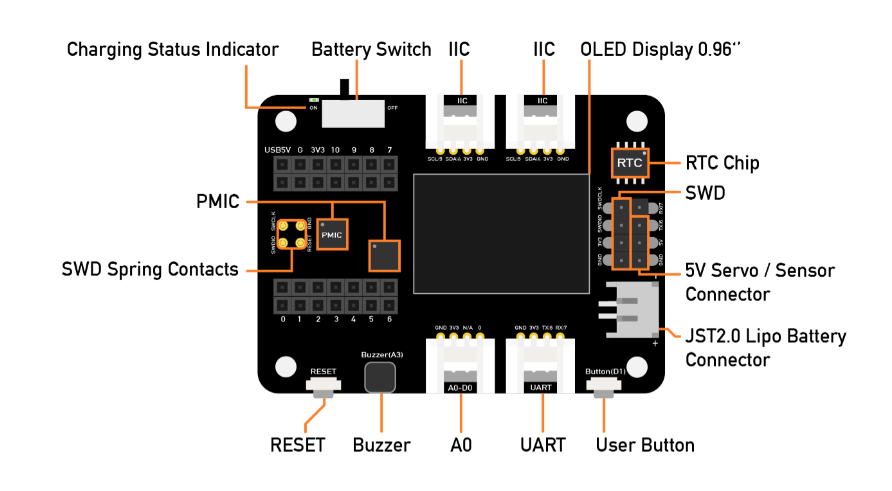
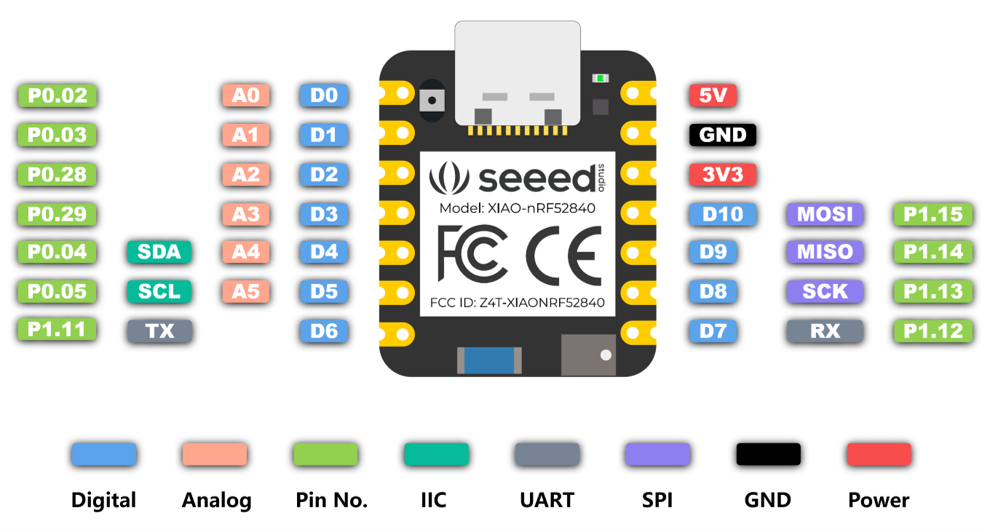
Definições de Pinos
Você precisa seguir o gráfico abaixo para usar os números internos de pinos apropriados ao conectar os módulos Grove aos conectores Grove no Grove Shield para Seeed Studio XIAO.
Funcionalidade Primária
- LED onboard
- IMU onboard (Sense)
- Mic onboard (Sense)
- Bluetooth
- TFLite
LED onboard
Neste exemplo usaremos o exemplo blinky para piscar o LED onboard.
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/basic/blinky
Pressione duas vezes o botão RESET e então faça o flash:
west flash -r uf2
Você verá o LED vermelho onboard alternar entre ligado e desligado, criando um efeito de piscar.
Vamos nos aprofundar um pouco neste exemplo para ver por que ele funciona.
O código de exemplo associado faz referência a led0:
#define LED0_NODE DT_ALIAS(led0)
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);
Isto é definido no código devicetree do Xiao nRF52840 por meio de um alias:
aliases {
led0 = &led0;
};
leds {
compatible = "gpio-leds";
led0: led_0 {
gpios = <&gpio0 26 GPIO_ACTIVE_LOW>;
label = "Red LED";
};
...
}
Ele corresponde ao pino 26 na placa.
Para os pinos com o breakout do Xiao você não precisa usar o mapeamento de pinos &gpio0 diretamente, pois os arquivos da placa fornecem um conector Xiao que simplifica a interface.
Por exemplo, se eu fosse referenciar o D0, eu o referenciaria como &gpio 2 ou &xiao_d 0.
/ {
xiao_d: connector {
compatible = "seeed,xiao-gpio";
#gpio-cells = <2>;
gpio-map-mask = <0xffffffff 0xffffffc0>;
gpio-map-pass-thru = <0 0x3f>;
gpio-map
= <0 0 &gpio0 2 0> /* D0 */
, <1 0 &gpio0 3 0> /* D1 */
, <2 0 &gpio0 28 0> /* D2 */
, <3 0 &gpio0 29 0> /* D3 */
, <4 0 &gpio0 4 0> /* D4 */
, <5 0 &gpio0 5 0> /* D5 */
, <6 0 &gpio1 11 0> /* D6 */
, <7 0 &gpio1 12 0> /* D7 */
, <8 0 &gpio1 13 0> /* D8 */
, <9 0 &gpio1 14 0> /* D9 */
, <10 0 &gpio1 15 0> /* D10 */
;
};
};
IMU onboard (Sense)
Uma das principais funcionalidades do Xiao nrf52840 é o seu sensor IMU integrado. Com esses dados é possível treinar um modelo de machine learning, detectar gestos, movimento da placa etc.
Para testar esse recurso utilizaremos um exemplo embutido que utiliza a IMU e depois analisaremos o código associado para entender por que ele funciona.
cd ~/zephyrproject/zephyr
west build -p -b xiao_ble/nrf52840/sense samples/sensor/lsm6dsl
Pressione duas vezes o botão RESET e então faça o flash:
west flash -r uf2
Em seguida, você precisará se conectar para ver a saída:
screen /dev/ttyACM0 115200
Isso deve exibir algo semelhante a isto:
3LSM6DSL sensor samples:
accel x:1.330409 ms/2 y:-1.705484 ms/2 z:9.957133 ms/2
gyro x:0.049632 dps y:-0.070860 dps z:-0.006184 dps
loop:46 trig_cnt:9677
3LSM6DSL sensor samples:
accel x:1.314257 ms/2 y:-1.734198 ms/2 z:9.902696 ms/2
gyro x:-0.220216 dps y:0.032833 dps z:-0.000458 dps
loop:47 trig_cnt:9892
3LSM6DSL sensor samples:
accel x:1.414158 ms/2 y:-1.476371 ms/2 z:9.835697 ms/2
gyro x:0.035430 dps y:-0.132252 dps z:-0.007788 dps
loop:48 trig_cnt:10107
Por que isso funciona? Podemos ver o código de exemplo através do repositório do Zephyr no GitHub.
const struct device *const lsm6dsl_dev = DEVICE_DT_GET_ONE(st_lsm6dsl);
A lógica do exemplo encontra o objeto devicetree st_lsm6dsl associado para a placa alvo. Podemos visualizar o devicetree do Xiao nrf52840 sense para ver melhor como isso está configurado:
lsm6ds3tr-c-en {
compatible = "regulator-fixed-sync", "regulator-fixed";
enable-gpios = <&gpio1 8 (NRF_GPIO_DRIVE_S0H1 | GPIO_ACTIVE_HIGH)>;
regulator-name = "LSM6DS3TR_C_EN";
regulator-boot-on;
startup-delay-us = <3000>;
};
&i2c0 {
compatible = "nordic,nrf-twim";
/* Cannot be used together with spi0. */
status = "okay";
pinctrl-0 = <&i2c0_default>;
pinctrl-1 = <&i2c0_sleep>;
pinctrl-names = "default", "sleep";
clock-frequency = <I2C_BITRATE_FAST>;
lsm6ds3tr_c: lsm6ds3tr-c@6a {
compatible = "st,lsm6dsl";
reg = <0x6a>;
irq-gpios = <&gpio0 11 GPIO_ACTIVE_HIGH>;
status = "okay";
};
};
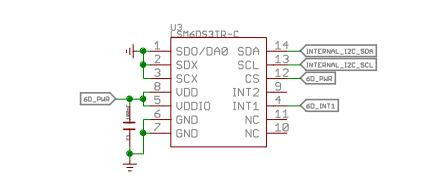
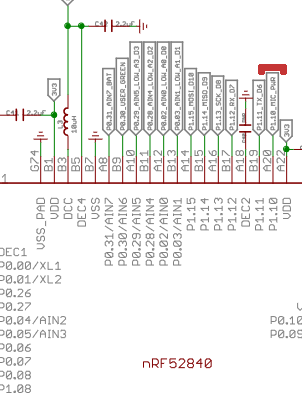
Um GPIO está sendo usado para habilitar a alimentação do pino. Você pode ver, a partir do arquivo de definição, que ele está usando GPIO1 8. Eu destaquei a parte relevante do esquema do Xiao nRF52840 abaixo:
A partir deste destaque do esquema você pode ver que o GPIO1 8 é o pino de habilitação para o IMU. Além disso, o GPIO0 11 é o pino de interrupção. Isso é refletido no trecho de devicetree acima.
Microfone Onboard (Sense)
Uma das principais funcionalidades do Xiao nrf52840 é seu microfone integrado. Assim como o IMU, ele permite muitas aplicações de aprendizado de máquina por meio de seu uso.
Para testar esse recurso, usaremos um exemplo integrado que utiliza o microfone e então veremos o código associado para entender por que isso funciona.
cd ~/zephyrproject/zephyr
west build -p -b xiao_ble/nrf52840/sense samples/drivers/audio/dmic
Pressione duas vezes o botão RESET e então faça o flash:
west flash -r uf2
Em seguida, você precisará se conectar para ver a saída:
screen /dev/ttyACM0 115200
Isso deve exibir algo semelhante a isto:
[00:00:00.297,088] <inf> dmic_sample: PCM output rate: 16000, channels: 1
[00:00:00.297,119] <inf> dmic_nrfx_pdm: PDM clock frequency: 1280000, actual PCM rate: 16000
[00:00:00.397,216] <inf> dmic_sample: 0 - got buffer 0x20008380 of 3200 bytes
[00:00:00.497,222] <inf> dmic_sample: 1 - got buffer 0x20006a80 of 3200 bytes
[00:00:00.597,229] <inf> dmic_sample: 2 - got buffer 0x20005180 of 3200 bytes
[00:00:00.697,235] <inf> dmic_sample: 3 - got buffer 0x20008380 of 3200 bytes
[00:00:00.797,241] <inf> dmic_sample: 4 - got buffer 0x20006a80 of 3200 bytes
[00:00:00.897,247] <inf> dmic_sample: 5 - got buffer 0x20005180 of 3200 bytes
[00:00:00.997,222] <inf> dmic_sample: 6 - got buffer 0x20008380 of 3200 bytes
[00:00:01.097,229] <inf> dmic_sample: 7 - got buffer 0x20006a80 of 3200 bytes
[00:00:01.097,259] <inf> dmic_sample: PCM output rate: 16000, channels: 2
[00:00:01.097,259] <inf> dmic_nrfx_pdm: PDM clock frequency: 1280000, actual PCM rate: 16000
[00:00:01.197,387] <inf> dmic_sample: 0 - got buffer 0x20008380 of 6400 bytes
[00:00:01.297,393] <inf> dmic_sample: 1 - got buffer 0x20005180 of 6400 bytes
[00:00:01.397,399] <inf> dmic_sample: 2 - got buffer 0x20006a80 of 6400 bytes
[00:00:01.497,375] <inf> dmic_sample: 3 - got buffer 0x20008380 of 6400 bytes
[00:00:01.597,381] <inf> dmic_sample: 4 - got buffer 0x20005180 of 6400 bytes
[00:00:01.697,387] <inf> dmic_sample: 5 - got buffer 0x20006a80 of 6400 bytes
[00:00:01.797,393] <inf> dmic_sample: 6 - got buffer 0x20008380 of 6400 bytes
[00:00:01.897,399] <inf> dmic_sample: 7 - got buffer 0x20005180 of 6400 bytes
[00:00:01.897,399] <inf> dmic_sample: Exiting
Por que isso funciona? Podemos ver o código de exemplo através do repositório do Zephyr no GitHub.
Este exemplo demonstra o seguinte:
Este é um aplicativo bem simples cuja finalidade é mostrar como usar a :ref:
Audio DMIC APIe também servir de auxílio no desenvolvimento de drivers para implementar essa API. Ele realiza duas transferências PDM com configurações diferentes (usando um canal e dois canais), mas não processa de forma alguma os dados de áudio recebidos.
const struct device *const dmic_dev = DEVICE_DT_GET(DT_NODELABEL(dmic_dev));
A lógica do exemplo encontra o objeto devicetree dmic_dev associado para a placa alvo. Podemos visualizar o devicetree do Xiao nrf52840 sense para ver melhor como isso está configurado:
/ {
msm261d3526hicpm-c-en {
compatible = "regulator-fixed";
enable-gpios = <&gpio1 10 (NRF_GPIO_DRIVE_S0H1 | GPIO_ACTIVE_HIGH)>;
regulator-name = "MSM261D3526HICPM-C-EN";
};
}
&pdm0 {
pinctrl-0 = <&pdm0_default>;
pinctrl-1 = <&pdm0_sleep>;
pinctrl-names = "default", "sleep";
clock-source = "PCLK32M";
};
No overlay do projeto de exemplo, esse regulador é então habilitado:
/ {
msm261d3526hicpm-c-en {
regulator-boot-on;
};
};
dmic_dev: &pdm0 {
status = "okay";
};
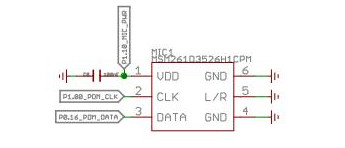
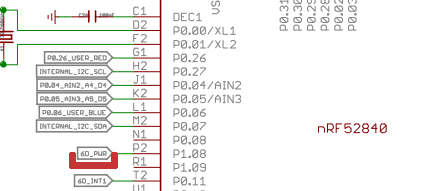
Um GPIO está sendo usado para habilitar a alimentação do pino. Eu destaquei a parte relevante do esquema do Xiao nRF52840 abaixo:
A partir deste destaque do esquema você pode ver que o GPIO1 10 é o pino de habilitação para o microfone.
Bluetooth
Para testar essa configuração, podemos usar um exemplo existente com o Zephyr:
west build -p always -b xiao_ble samples/bluetooth/observer
Faça o flash da sua placa:
west flash -r uf2
Espere um momento para o MCU reiniciar após o flash e conecte-se para monitorar:
screen /dev/ttyACM0 115200
Você verá um console disponível para enviar comandos para a placa:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
Starting Observer Demo
Started scanning...
Exiting main thread.
Device found: EC:11:27:22:AF:D2 (public) (RSSI -74), type 0, AD data len 31
Device found: 0D:9A:BE:8D:10:FC (random) (RSSI -81), type 3, AD data len 31
Device found: D2:70:D8:F2:6F:C4 (random) (RSSI -68), type 0, AD data len 20
Device found: 72:7C:3C:87:E2:17 (random) (RSSI -77), type 0, AD data len 17
Device found: 65:65:23:B9:AD:EC (random) (RSSI -68), type 0, AD data len 17
Device found: 6D:39:26:C2:94:B5 (random) (RSSI -70), type 0, AD data len 18
CONFIG_BT=y
CONFIG_BT_OBSERVER=y
O arquivo conf aqui habilita recursos relacionados a bluetooth para a compilação do Zephyr.
TFLite - Hello World
Habilite o TFLite com o Zephyr e atualize:
west config manifest.project-filter -- +tflite-micro
west update
Compile o exemplo e faça o flash para sua placa:
west build -p always -b xiao_ble samples/modules/tflite-micro/hello_world
Faça o flash da sua placa:
west flash -r uf2
Espere um momento para o MCU reiniciar após o flash e conecte-se para monitorar:
screen /dev/ttyACM0 115200
Você verá resultados retornados pelo console:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
x_value: 1.0*2^-127, y_value: 1.0*2^-127
x_value: 1.2566366*2^-2, y_value: 1.4910772*2^-2
x_value: 1.2566366*2^-1, y_value: 1.1183078*2^-1
x_value: 1.8849551*2^-1, y_value: 1.677462*2^-1
x_value: 1.2566366*2^0, y_value: 1.9316229*2^-1
x_value: 1.5707957*2^0, y_value: 1.0420598*2^0
x_value: 1.8849551*2^0, y_value: 1.9146791*2^-1
x_value: 1.0995567*2^1, y_value: 1.6435742*2^-1
x_value: 1.2566366*2^1, y_value: 1.0674761*2^-1
x_value: 1.4137159*2^1, y_value: 1.8977352*2^-3
Informações adicionais sobre TFLite estão fora do escopo deste guia, mas o exemplo serve como uma referência para as capacidades do dispositivo e os componentes necessários para executar a configuração do TFLite.
Componentes Adicionais
- Grove - Expansion Board - Display I2C
- Grove - Expansion Board - Botão
- Grove - Expansion Board - Buzzer
- Grove - Expansion Board - Cartão SD
- Grove - Temperature and Humidity Sensor (SHT31)
- 1.69inch LCD Display Module, 240×280 Resolution, SPI Interface
- Round Display for Xiao
- Round Display for Xiao - Cartão SD
Grove - Placa de Expansão - Display I2C
Para testar esta configuração podemos usar um exemplo existente com Zephyr:
west build -p always -b xiao_ble samples/drivers/display -- -DSHIELD=seeed_xiao_expansion_board
west flash -r uf2
Você verá um display mostrando vários quadrados pretos e um quadrado piscando em um canto, dado que este display só suporta duas cores.
Vamos nos aprofundar um pouco neste exemplo para ver por que ele funciona:
/ {
chosen {
zephyr,display = &ssd1306;
};
};
&xiao_i2c {
status = "okay";
ssd1306: ssd1306@3c {
compatible = "solomon,ssd1306fb";
reg = <0x3c>;
width = <128>;
height = <64>;
segment-offset = <0>;
page-offset = <0>;
display-offset = <0>;
multiplex-ratio = <63>;
segment-remap;
com-invdir;
prechargep = <0x22>;
};
};
O shield configura uma tela OLED SSD1306 no registrador 0x3C. Ela é selecionada como o display do Zephyr na seção chosen.
Grove - Placa de Expansão - Botão
Para testar esta configuração podemos usar um exemplo existente com Zephyr:
west build -p always -b xiao_ble samples/basic/button -- -DSHIELD=seeed_xiao_expansion_board
Grave o firmware na sua placa:
west flash -r uf2
Espere um momento para o MCU reiniciar após a gravação e conecte o monitor:
screen /dev/ttyACM0 115200
Pressionar o botão com o exemplo fará o LED onboard acender.
Você verá resultados retornados no console:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
Set up button at gpio@50000000 pin 3
Set up LED at gpio@50000000 pin 26
Press the button
Button pressed at 839637
Button pressed at 857904
Button pressed at 883367
Button pressed at 1001258
Vamos nos aprofundar um pouco neste exemplo para ver por que ele funciona:
/ {
aliases {
sw0 = &xiao_button0;
};
buttons {
compatible = "gpio-keys";
xiao_button0: button_0 {
gpios = <&xiao_d 1 (GPIO_PULL_UP | GPIO_ACTIVE_LOW)>;
label = "SW0";
zephyr,code = <INPUT_KEY_0>;
};
};
};
O arquivo de shield / overlay é usado para configurar vários componentes da placa. Usando esse arquivo, o exemplo do botão pode ser utilizado, pois o overlay permite que o Zephyr configure o botão e o torne disponível para o código associado.
Neste caso o D1 no Xiao nrf52840. Ele é configurado neste overlay para atuar como um botão e é associado ao nome sw0 para permitir que seja usado pelo exemplo, que possui código esperando isso.
Grove - Placa de Expansão - Buzzer
Vamos ativar nosso buzzer usando o exemplo blinky PWM para controlar sua ativação por meio de um sinal PWM. Para isso usaremos um overlay personalizado que habilita o PWM para o pino A3.
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/basic/blinky_pwm -- -DDTC_OVERLAY_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao-nrf52480/xiao_expansion_buzzer.overlay"
Após a gravação você deverá começar a ouvir uma série de bipes que mudam de som à medida que o exemplo é executado.
Vamos ver por que isso funciona:
&pwm0 {
status = "disabled";
};
&sw_pwm {
status = "okay";
channel-gpios = <&gpio0 29 PWM_POLARITY_INVERTED>;
};
&pwm_led0 {
pwms = <&sw_pwm 0 PWM_MSEC(20) PWM_POLARITY_INVERTED>;
};
O overlay configura a lógica de PWM para o pino 29, que corresponde ao pino A3 no pinout do Xiao nrf52840.
Grove - Placa de Expansão - Cartão SD
Aqui usaremos o exemplo de sistema de arquivos juntamente com o shield Xiao Expansion Board para tentar interagir com o leitor de cartão SD via SPI. O shield da placa de expansão tem o pino CS configurado para o pino &xiao_d 2 associado, então nenhum trabalho é necessário da sua parte para associar esse recurso com a placa além de adicionar o shield. Para prepará-lo ainda mais, estamos usando uma configuração personalizada que habilita a funcionalidade de cartão SD.
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/subsys/fs/fs_sample -- -DEXTRA_CONF_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao_expansion_sd.conf" -DSHIELD=seeed_xiao_expansion_board
Agora grave e monitore (primeiro pressionando RESET duas vezes para entrar no modo bootloader uf2):
west flash -r uf2
Você deverá ver uma resposta semelhante a esta:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
[00:00:00.483,367] <inf> sd: Maximum SD clock is under 25MHz, using clock of 24000000Hz
[00:00:00.483,856] <inf> main: Block count 15519744
Sector size 512
Memory Size(MB) 7578
Disk mounted.
Listing dir /SD: ...
[FILE] IMAGE1.JPG (size = 58422)
[FILE] IMAGE2.JPG (size = 97963)
Neste caso meu cartão SD tinha dois arquivos. Seus nomes e tamanhos foram enviados para o meu console.
Vamos analisar os elementos relevantes em jogo aqui:
CONFIG_SPI=y
CONFIG_DISK_DRIVER_SDMMC=y
CONFIG_GPIO=y
Na configuração associada estamos habilitando SPI, o driver de disco SDMMC e o GPIO. Sem essa configuração o overlay resultará em um erro, pois o exemplo não consegue encontrar o cartão SD.
A parte relevante do shield Xiao Expansion Board é mostrada abaixo:
&xiao_spi {
status = "okay";
cs-gpios = <&xiao_d 2 GPIO_ACTIVE_LOW>;
sdhc0: sdhc@0 {
compatible = "zephyr,sdhc-spi-slot";
reg = <0>;
status = "okay";
mmc {
compatible = "zephyr,sdmmc-disk";
status = "okay";
};
spi-max-frequency = <24000000>;
};
};
Como mencionado anteriormente, o mapeamento do pino &xiao_d 2 é usado para permitir que o pino D2 seja selecionado para isso, independentemente da placa utilizada, desde que ela ofereça a configuração de pinos &xiao_d.
Grove - Sensor de Temperatura e Umidade (SHT31)
Primeiro solde os pinos e conecte seu Xiao nrf52840 à placa de expansão. Em seguida, conecte um cabo conector Grove entre o Grove SHT31 e uma das portas I2C na placa de expansão.
Para testar esta configuração podemos usar um exemplo existente com Zephyr:
west build -p always -b xiao_ble samples/sensor/sht3xd -- -DDTC_OVERLAY_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/sht31.overlay
Grave sua placa depois que ela estiver em modo bootloader uf2:
west flash -r uf2
Espere um momento para o MCU reiniciar após a gravação e conecte o monitor:
screen /dev/ttyACM0 115200
Você verá resultados retornados no console:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
SHT3XD: 25.68 Cel ; 54.73 %RH
SHT3XD: 25.75 Cel ; 55.44 %RH
SHT3XD: 25.79 Cel ; 55.95 %RH
SHT3XD: 25.82 Cel ; 55.93 %RH
SHT3XD: 25.84 Cel ; 56.07 %RH
SHT3XD: 25.84 Cel ; 55.69 %RH
Vamos nos aprofundar um pouco neste exemplo para ver por que ele funciona:
&xiao_i2c {
sht3xd@44 {
compatible = "sensirion,sht3xd";
reg = <0x44>;
};
};
O arquivo de app overlay é usado para configurar vários componentes da placa. Usando esse arquivo o exemplo do SHT31 pode ser utilizado, pois o overlay informa à lógica do exemplo como configurar o sensor para nossa placa.
Módulo de Display LCD de 1,69 polegadas, Resolução 240×280, Interface SPI
Para este exemplo usaremos SPI para conectar um LCD de 1,69 polegadas com resolução de 240x280.
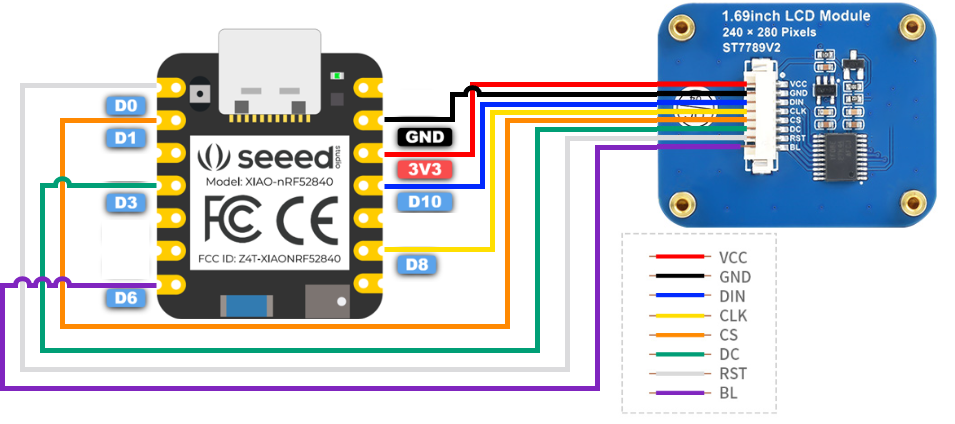
Primeiro conecte sua placa à tela LCD usando a imagem a seguir como guia (neste caso estamos usando o Xiao nrf52840, mas o mesmo layout de pinos é usado para a conexão aqui).
| Display LCD SPI 1,69 polegadas | XIAO nrf52840 |
|---|---|
| VCC | 3V3 |
| GND | GND |
| DIN | D10 |
| CLK | D8 |
| CS | D1 |
| DC | D3 |
| RST | D0 |
| BL | D6 |
Agora podemos construir e gravar o firmware:
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/drivers/display -- -DDTC_OVERLAY_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/240x280_st7789v2.overlay -DEXTRA_CONF_FILE=$(dirname $(pwd))/applications/xiao-zephyr-examples/240x280_st7789v2.conf
west flash -r uf2
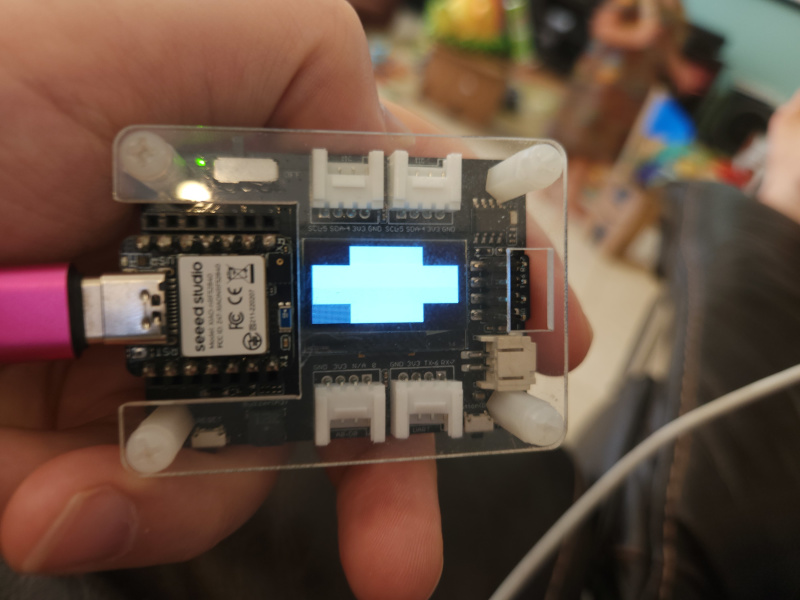
Com o novo firmware em funcionamento, o dispositivo agora mostra a mesma tela de demonstração que vimos anteriormente na placa de expansão, só que agora atualizada para o LCD colorido via SPI.
Display Redondo para Xiao
Para testar esta configuração podemos usar um exemplo existente com Zephyr:
west build -p always -b xiao_ble samples/drivers/display -- -DSHIELD=seeed_xiao_round_display
Entre no modo bootloader e grave seu dispositivo:
west flash -r uf2
Você verá um display mostrando vários cantos coloridos com um canto preto piscando.
Outro exemplo demonstra o uso da tela sensível ao toque:
west build -p always -b xiao_ble samples/modules/lvgl/demos -- -DSHIELD=seeed_xiao_round_display -DCONFIG_LV_Z_DEMO_MUSIC=y
A demonstração de música mostrada aqui é apenas uma parte da tela real, mas ainda assim demonstra a tela sensível ao toque em ação. Como você pode ver, tocar no botão de play liga a animação de música.
Você pode ver pelo arquivo de shield que isso funciona interagindo com o driver de display redondo GC9A01 via SPI e com o módulo de toque CHSC6X via i2c.
Vamos nos aprofundar um pouco neste exemplo para ver como ele funciona:
/ {
chosen {
zephyr,display = &gc9a01_xiao_round_display;
};
lvgl_pointer {
compatible = "zephyr,lvgl-pointer-input";
input = <&chsc6x_xiao_round_display>;
};
};
/*
* xiao_serial uses pins D6 and D7 of the Xiao, which are used respectively to
* control the screen backlight and as touch controller interrupt.
*/
&xiao_serial {
status = "disabled";
};
&xiao_i2c {
clock-frequency = < I2C_BITRATE_FAST >;
chsc6x_xiao_round_display: chsc6x@2e {
status = "okay";
compatible = "chipsemi,chsc6x";
reg = <0x2e>;
irq-gpios = <&xiao_d 7 GPIO_ACTIVE_LOW>;
};
};
&xiao_spi {
status = "okay";
cs-gpios = <&xiao_d 1 GPIO_ACTIVE_LOW>, <&xiao_d 2 GPIO_ACTIVE_LOW>;
gc9a01_xiao_round_display: gc9a01@0 {
status = "okay";
compatible = "galaxycore,gc9x01x";
reg = <0>;
spi-max-frequency = <DT_FREQ_M(100)>;
cmd-data-gpios = <&xiao_d 3 GPIO_ACTIVE_HIGH>;
pixel-format = <PANEL_PIXEL_FORMAT_RGB_565>;
width = <240>;
height = <240>;
display-inversion;
};
};
Este shield faz o seguinte:
- Seleciona o display GC9A01 como o display Zephyr escolhido
- Define a lógica do ponteiro LVGL para usar o módulo CHSC6X
- Desabilita a serial pois os pinos são usados para o backlight e interrupção de toque (como visto acima via:
irq-gpios = <&xiao_d 7 GPIO_ACTIVE_LOW>;) - Configura o display redondo para SPI usando os pinos D1, D2 e D3
A lógica de exemplo baseia-se no código de exemplo da demonstração LVGL que pode ser examinado mais detalhadamente.
Display Redondo para Xiao - Cartão SD
Usaremos aqui o exemplo de sistema de arquivos junto com o shield da Xiao Expansion Board para tentar a interface com o leitor de cartão SD via SPI. O shield da placa de expansão tem o pino CS configurado para o pino &xiao_d 2 associado, então nenhum trabalho é necessário da sua parte para associar essa capacidade à placa além de adicionar o shield. Para prepará-lo ainda mais, estamos usando uma configuração personalizada que habilita a funcionalidade do cartão SD.
cd ~/zephyrproject/zephyr
west build -p always -b xiao_ble samples/subsys/fs/fs_sample -- -DEXTRA_CONF_FILE="$(dirname $(pwd))/applications/xiao-zephyr-examples/xiao_expansion_sd.conf" -DSHIELD=seeed_xiao_round_display
Agora faça o flash e monitore (primeiro pressionando RESET duas vezes para entrar no modo bootloader uf2):
west flash -r uf2
Espere um momento para o MCU reiniciar após o flash e conecte-se ao monitor:
screen /dev/ttyACM0 115200
Você deverá ver uma resposta semelhante a esta:
*** Booting Zephyr OS build v3.6.0-5403-gd9e2b0c70763 ***
[00:00:00.491,485] <inf> sd: Maximum SD clock is under 25MHz, using clock of 24000000Hz
[00:00:00.491,973] <inf> main: Block count 15519744
Sector size 512
Memory Size(MB) 7578
Disk mounted.
Listing dir /SD: ...
[FILE] IMAGE1.JPG (size = 58422)
[FILE] IMAGE2.JPG (size = 97963)
Como esperado, o conteúdo do arquivo é exibido de maneira semelhante à saída do exemplo de cartão SD da Xiao Expansion Board.
A parte relevante do shield do display redondo é mostrada abaixo:
&xiao_spi {
status = "okay";
cs-gpios = <&xiao_d 1 GPIO_ACTIVE_LOW>, <&xiao_d 2 GPIO_ACTIVE_LOW>;
sdhc_xiao_round_display: sdhc@1 {
compatible = "zephyr,sdhc-spi-slot";
reg = <1>;
status = "okay";
mmc {
compatible = "zephyr,sdmmc-disk";
status = "okay";
};
spi-max-frequency = <DT_FREQ_M(24)>;
};
};
D2 é usado para o pino CS do SD.
✨ Projeto de Colaborador
- Este projeto é apoiado pelo Projeto de Colaboradores da Seeed Studio.
- Agradecemos os esforços do Tim e o seu trabalho será exibido.
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.