Primeiros Passos com AC1

Introdução
Active Camera, inventada pela RoboSense, é uma categoria inovadora em visão robótica projetada para lidar com os desafios de percepção de mobilidade e cognição operacional.
A AC1, a primeira desta série, integra múltiplos sensores para fornecer fusão em nível de hardware de informações de profundidade, dados de imagem e dados de postura de movimento, sincronizados no tempo e no espaço. Isso permite que robôs capturem detalhes ambientais abrangentes, superando interferências de luz solar e superfícies altamente reflexivas e se adaptando a diversos cenários internos e externos.
Neste wiki, demonstraremos o processo detalhado de uso da AC1 juntamente com o reComputer Robotics.
Pré-requisitos
| AC1 | reComputer Robotics J4012 |
|---|---|
|  |
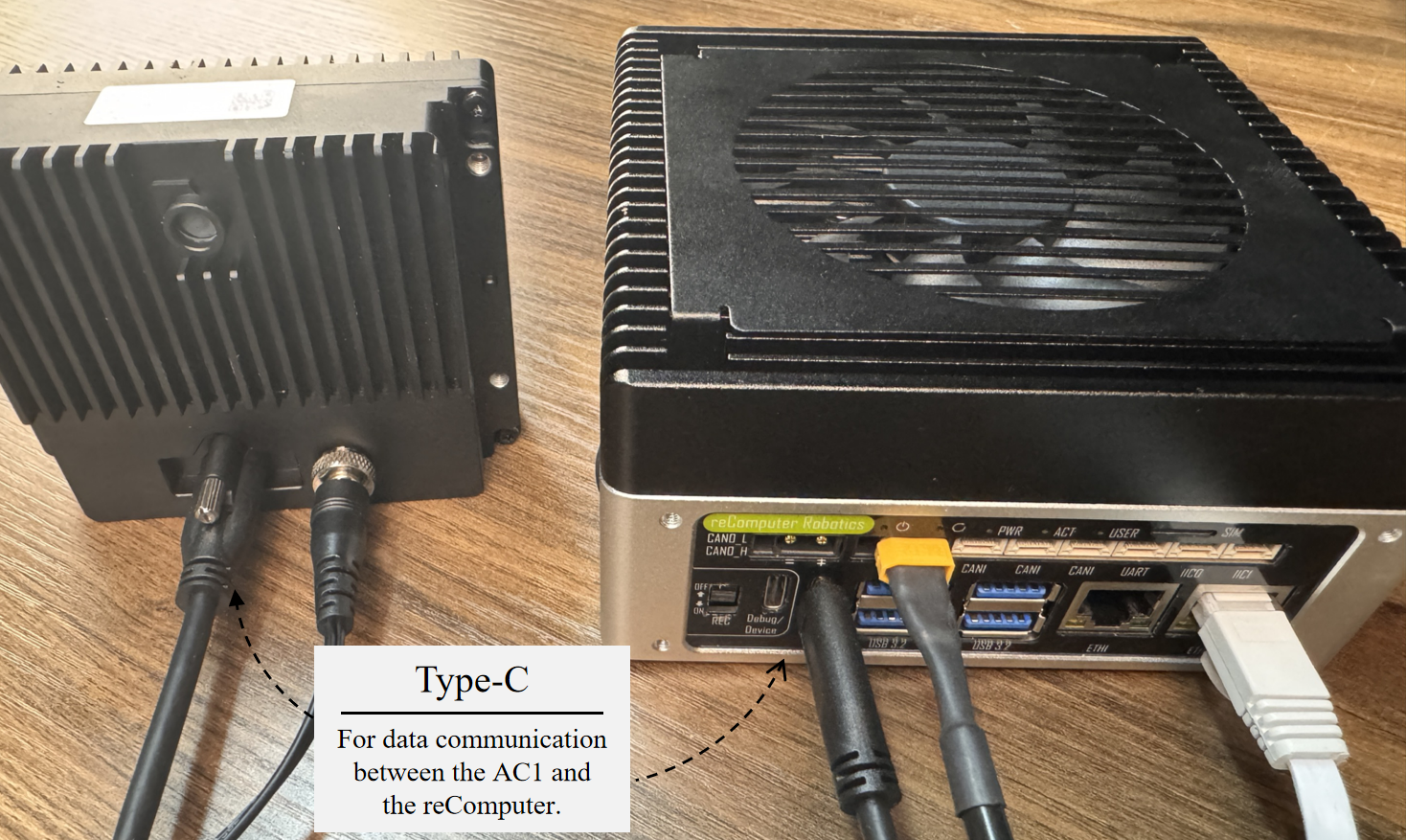
Conexão de Hardware
Primeiros Passos
Etapa 1. instalar ROS no reComputer Robotics J4012
a. Adicione o seguinte conteúdo a ~/.bashrc.
export CUDA_HOME=/usr/local/cuda
export PATH=$CUDA_HOME/bin:$PATH
export LD_LIBRARY_PATH=$CUDA_HOME/lib64:$LD_LIBRARY_PATH
export PATH=/usr/src/tensorrt/bin:$PATH
Podemos abrir o arquivo no terminal inserindo o comando vim ~/bashrc.
b. Digite o seguinte comando no terminal para instalar o ROS2.
sudo apt install software-properties-common -y
sudo add-apt-repository universe
sudo apt update
sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt install ros-humble-desktop -y
Para verificar se o ROS2 foi instalado com sucesso, podemos criar dois novos terminais no dispositivo e executar os seguintes comandos, respectivamente.
# terminal1
ros2 run demo_nodes_cpp talker
# terminal2
ros2 run demo_nodes_py listener
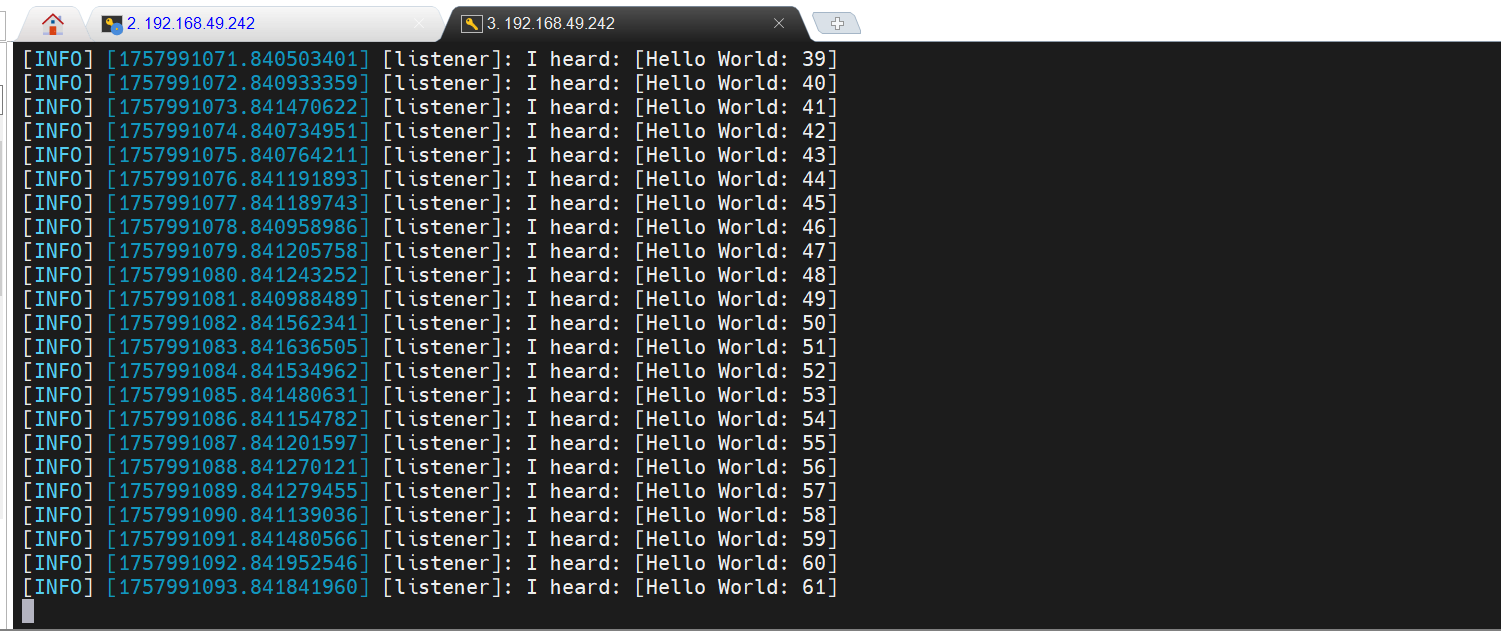
Se ambos os terminais imprimirem as mensagens, significa que o ROS 2 Humble foi instalado com sucesso! 🎉
Etapa 2. Instalar o ROS SDK para AC1
Digite o seguinte comando no terminal do reComputer.
git clone https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra.git
sudo apt-get install libavformat-dev libavdevice-dev libavcodec-dev
sudo apt install python3-colcon-common-extensions -y
echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc
source ~/.bashrc
cd robosense_ac_ros2_sdk_infra/modules/
colcon build
source install/setup.bash

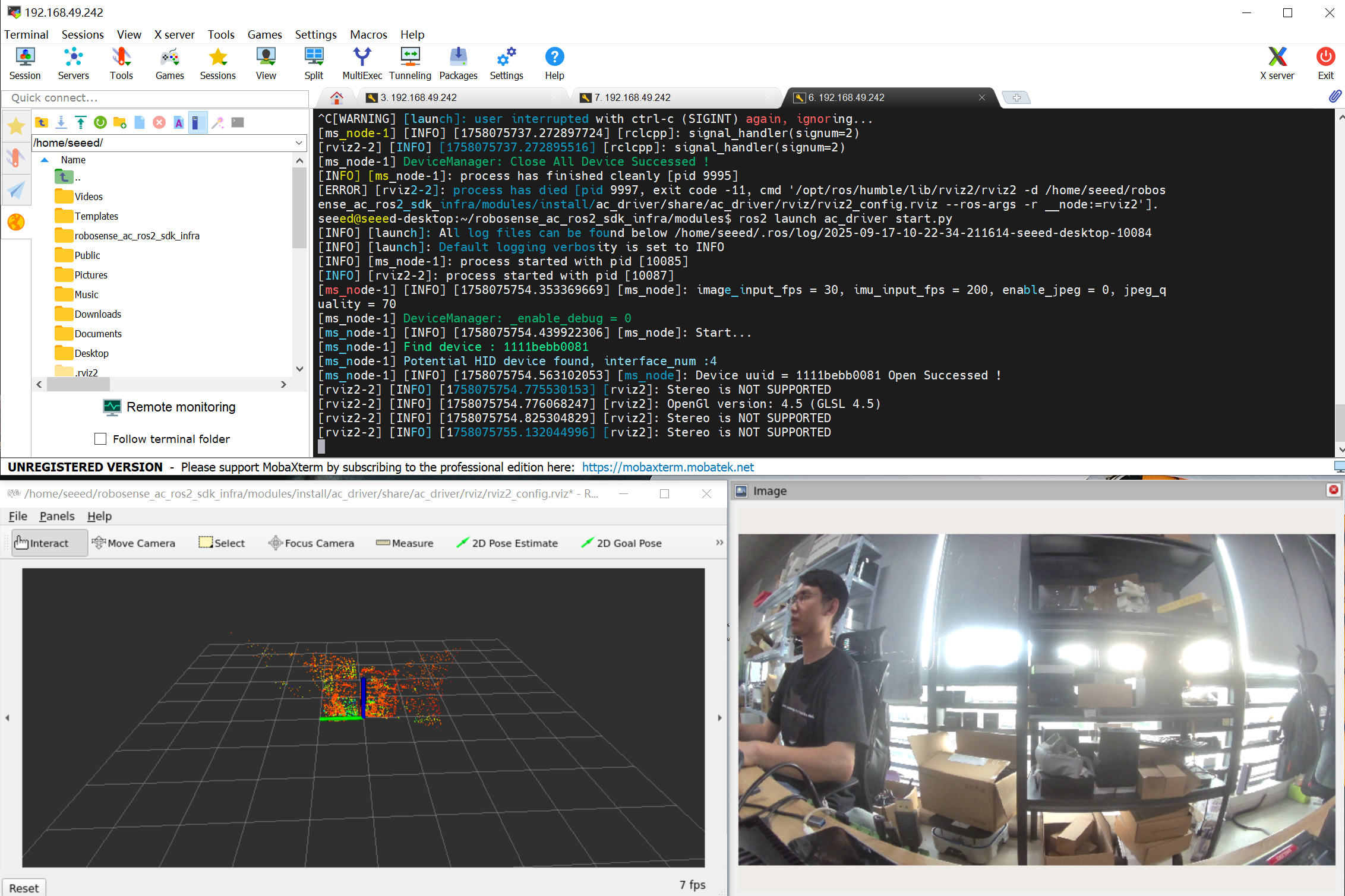
Se tudo correr bem, podemos visualizar os dados de ambiente capturados pela AC1 usando o Rviz.
ros2 launch ac_driver start.py
Próxima Etapa
Muitos algoritmos avançados podem ser reproduzidos usando a AC1 juntamente com o reComputer Jetson. Para mais detalhes, consulte aqui.
Recursos
- https://robosense-wiki-en.readthedocs.io/en/latest/
- https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra
- https://www.seeedstudio.com/reComputer-Robotics-J3011-with-GMSL-extension-board-p-6538.html
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer a você diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.