Primeiros passos com o AI Assistant
Introdução
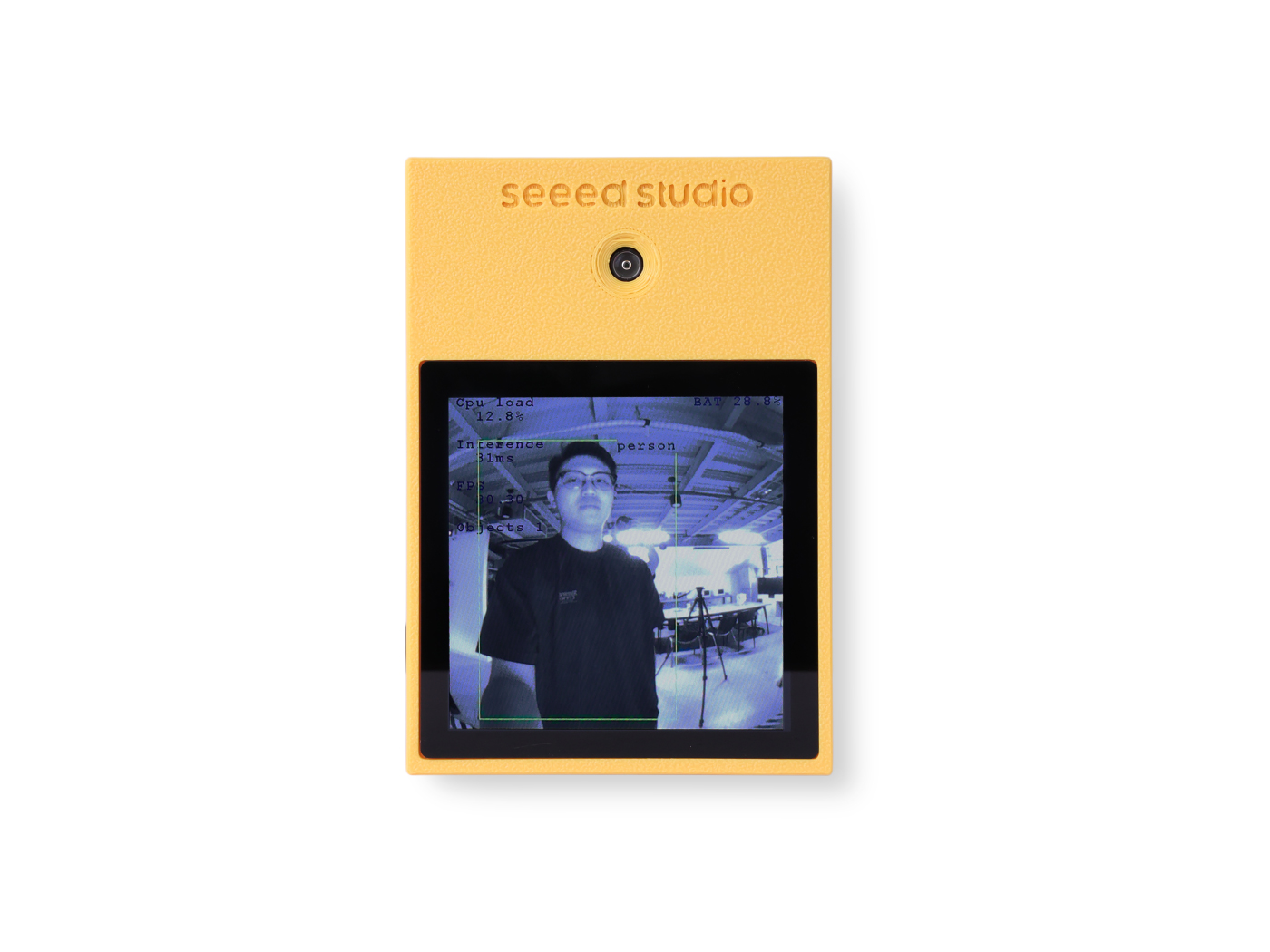
O kit de desenvolvimento AI Assistant foi criado em conjunto pela Seeed Studio e pela STMicroelectronics. Esta é uma plataforma de desenvolvimento projetada para aplicações de ponta em IA na borda. Centralizada no MCU de alto desempenho STM32N657, com seu acelerador de IA ST Neural-ART integrado, ela combina perfeitamente poderosas capacidades de computação de IA com as vantagens clássicas de um MCU: baixo consumo de energia, formato compacto e boa relação custo-benefício. O kit vem equipado com uma câmera global shutter integrada, um sensor IMU com unidade de processamento de IA, uma tela sensível ao toque de alta definição e um módulo Wi-Fi, oferecendo uma solução completa de hardware e software para desenvolver produtos de próxima geração em visão inteligente e interação por voz.
Recursos
- Recurso 1: Microcontrolador de IA topo de linha Alimentado pelo ST STM32N657, com um núcleo Arm® Cortex®-M55 de alto desempenho e uma NPU ST Neural-ART integrada que oferece até 600 GOPS para aceleração eficiente de modelos de IA.
- Recurso 2: Sensor de Visão de nível profissional
Equipado com uma câmera ST VD55G1
global shutter, fornecendo imagens nítidas e sem distorção de objetos em movimento rápido, o que é fundamental para tarefas de visão computacional de alta precisão. - Recurso 3: Sensoriamento inteligente com ISPU Conta com uma IMU LSM6DSO16IS com Unidade Inteligente de Processamento de Sensor (ISPU) integrada, permitindo reconhecimento de gestos e atividades com consumo ultrabaixo de energia, sem acordar o processador principal.
- Recurso 4: Periféricos interativos ricos Integra um display tátil capacitivo de 4,0 polegadas 480x480, um microfone digital de alta fidelidade e um codec de áudio, fornecendo uma base completa de hardware para desenvolver aplicações de IA interativas prontas para uso.
- Recurso 5: Conectividade abrangente Inclui um módulo Wi-Fi integrado para conectividade IoT perfeita, além de uma porta USB-C e múltiplos cabeçalhos de expansão para máxima flexibilidade de desenvolvimento.
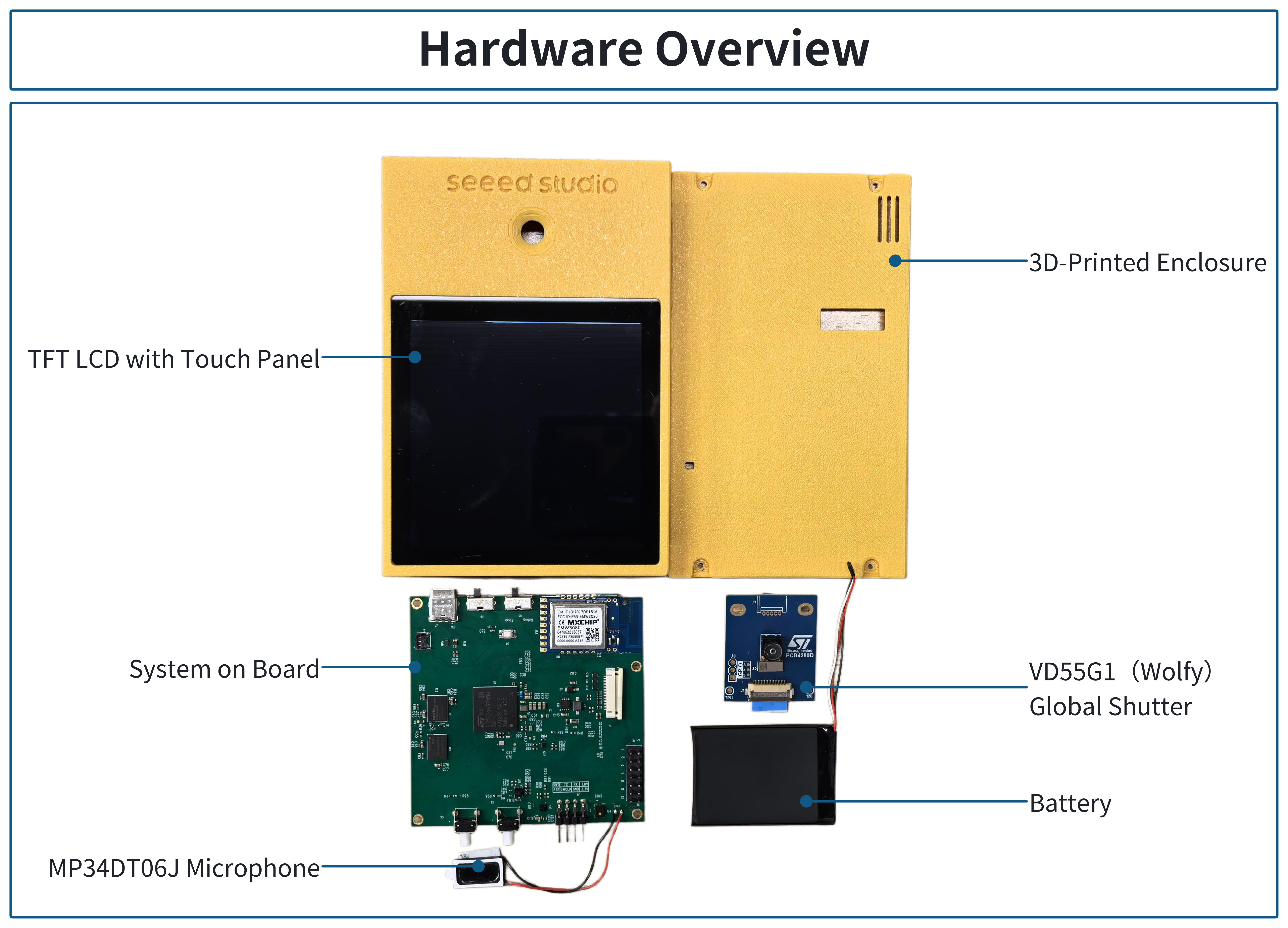
Visão geral do hardware
Antes de começar qualquer coisa, é essencial conhecer alguns parâmetros básicos do produto. A tabela a seguir fornece informações sobre as características do AI Assistant.
| Categoria | Recurso | Especificação |
|---|---|---|
| Sistema central | Controlador principal | STMicroelectronics STM32N657X0H3Q |
| Arquitetura do núcleo | Arm® Cortex®-M55 | |
| Unidade de Processamento Neural | ST Neural-ART, 600 GOPS | |
| Memória externa | 128MB NOR Flash, 32MB DRAM | |
| Sensores | Câmera | STMicroelectronics VD55G1 (800x700, Global Shutter) |
| IMU | STMicroelectronics LSM6DSO16IS (6 eixos com ISPU integrado) | |
| Magnetômetro | STMicroelectronics LIS2MDL | |
| Periféricos | Display | LCD TFT 4,0" (480x480), Toque Capacitivo |
| Áudio | Codec Cirrus Logic WM8994 e Microfone Digital ST MP34DT06JTR | |
| Conectividade | Sem fio | Módulo Wi-Fi MXCHIP EMW3080 |
| Interfaces | USB-C x1, Porta SWD x1, Expansão de Microfone x1, Interface de Câmera RPi x1 | |
| Mecânica e Energia | Dimensões (Carcaça) | 130mm x 90mm |
| Fonte de alimentação | 5V via USB-C ou Porta para Bateria de Lítio |
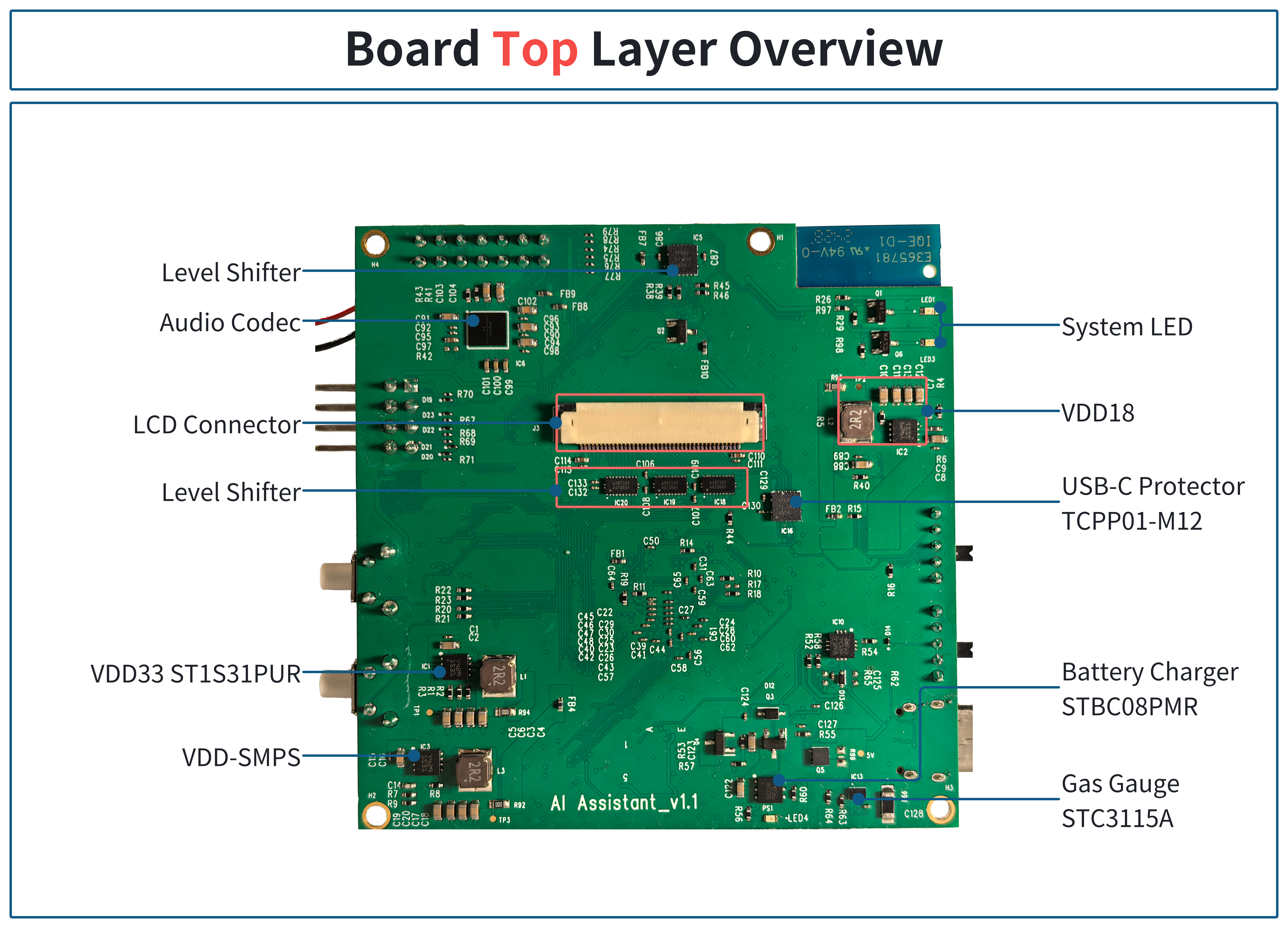
Visão geral da camada superior da placa
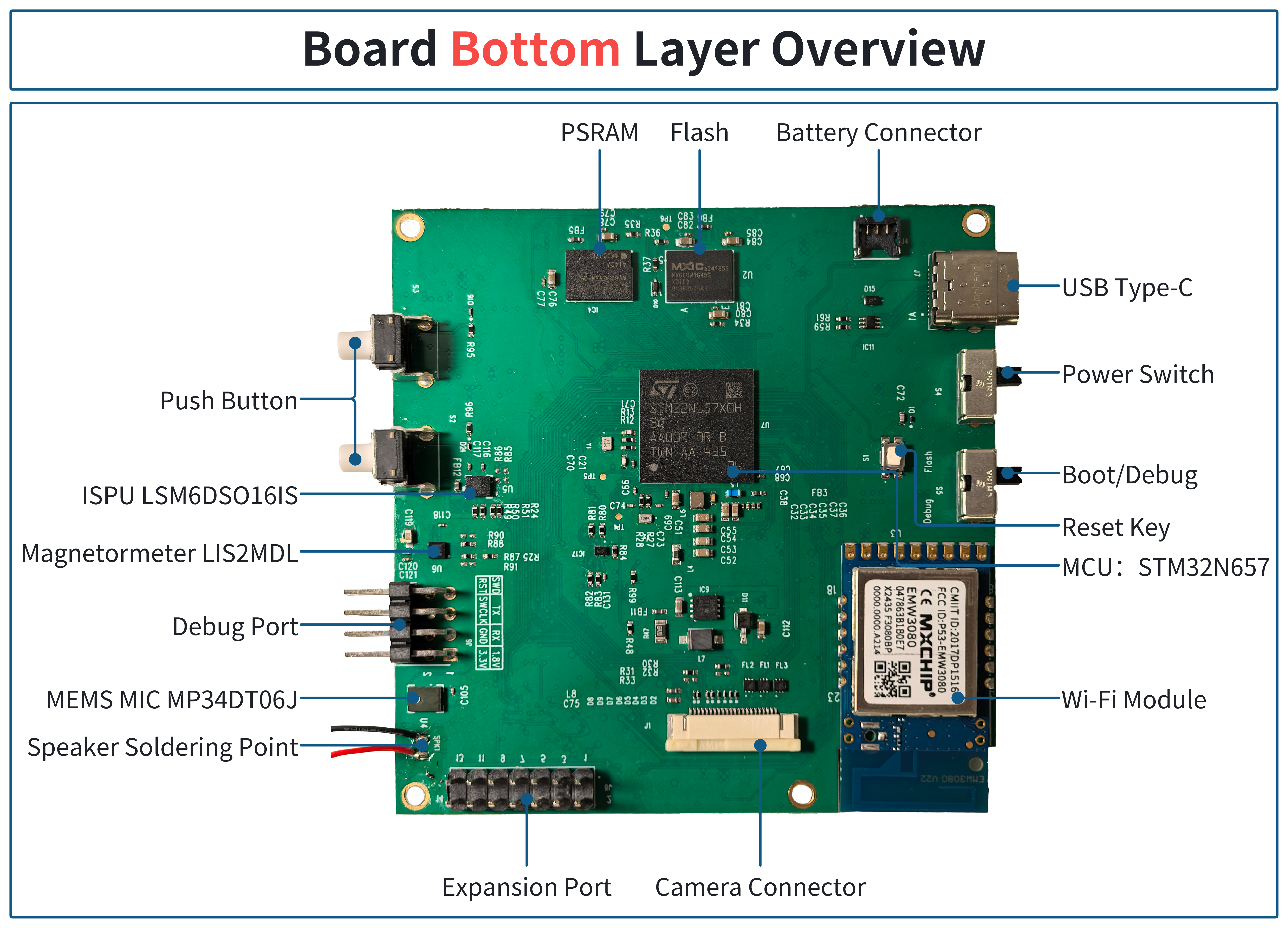
Visão geral da camada inferior da placa
Comece com o aplicativo de referência do AI Assistant
Para começar, clone o repositório a partir do link do GitHubgit clone https://github.com/stm32-hotspot/STM32N6-AI-Assistant-People-Detection.git na sua pasta local de preferência.
Aplicação de Visão Computacional para permitir a implantação de modelos de detecção de objetos na placa AI Assistant. É baseada na versão oficial do pacote de aplicação n6-ai-people-detection-v1.0.0 para a placa STM32N6570-DK.
Esta aplicação vem pré-compilada com um modelo de detecção de pessoas "TinyYOLOv2".
Esta seção fornece uma visão geral da aplicação. Documentação adicional está disponível em Documentação adicional da aplicação.
Recursos demonstrados neste exemplo
- Fluxo de aplicação multithread (Azure RTOS ThreadX)
- Inferência de modelo de IA quantizado acelerada por NPU
- Dois
pipesDCMIPP - Recorte, dizimação e redução de escala DCMIPP
- Implementação LTDC de dupla camada
- Uso do ISP DCMIPP
- Modo de desenvolvimento
- Boot a partir da Flash Externa
Suporte de hardware
-
Kit AI Assistant
-
3 Câmeras são suportadas:
- MB1854B IMX335
Kit AI Assistant com câmera VD55G1.
Versão das ferramentas
- STM32CubeIDE (STM32CubeIDE 1.18.0)
- STM32CubeProgrammer (v2.18.0)
- STEdgeAI (v2.1.0)
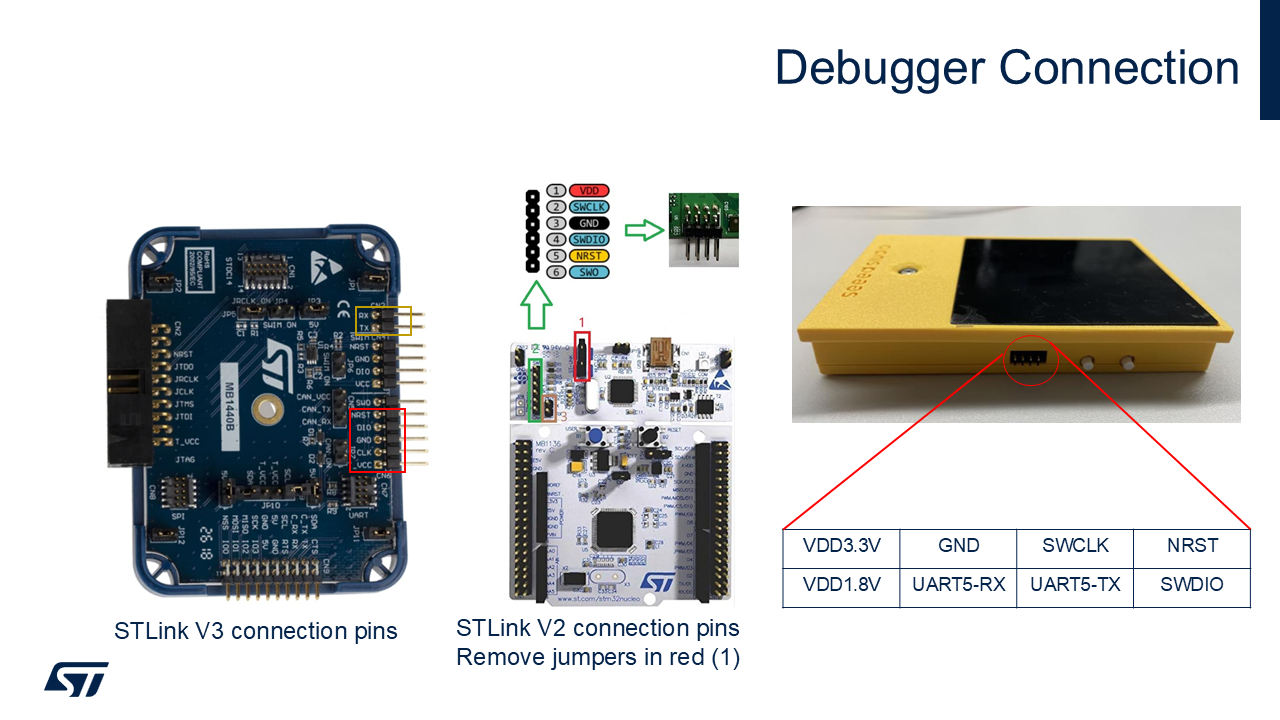
Conexão ST-Link
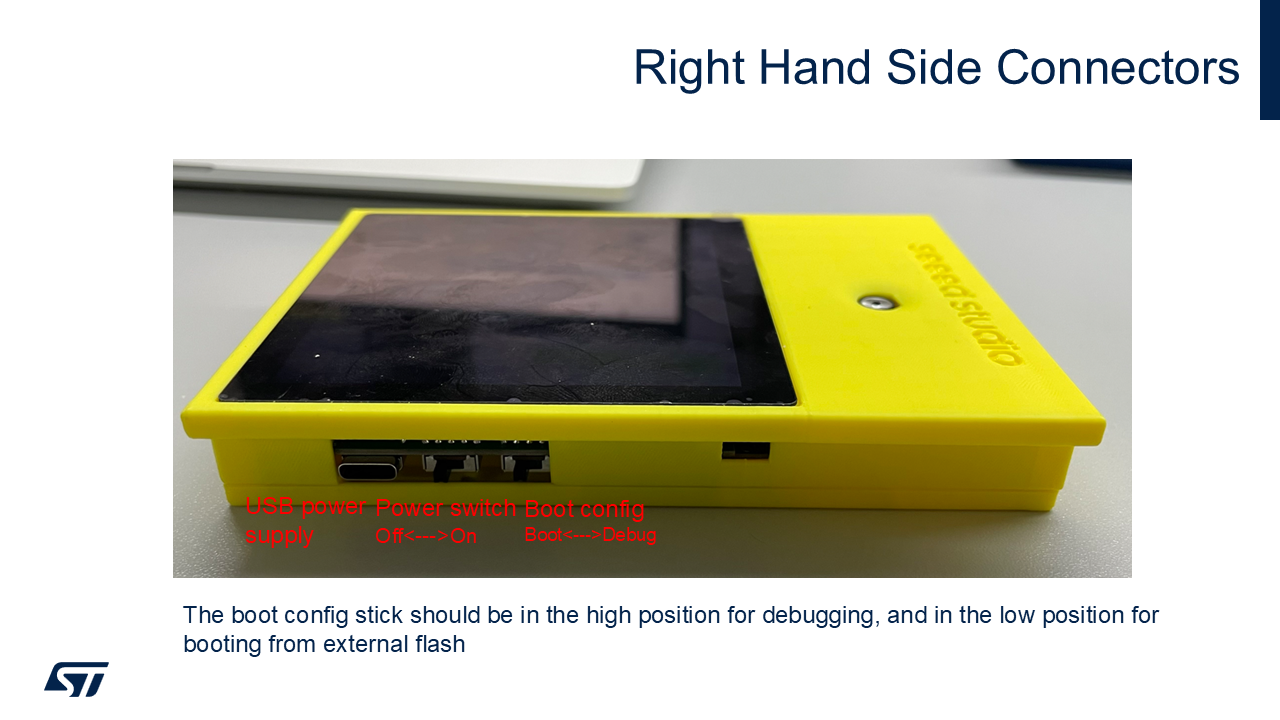
Conectores do lado direito
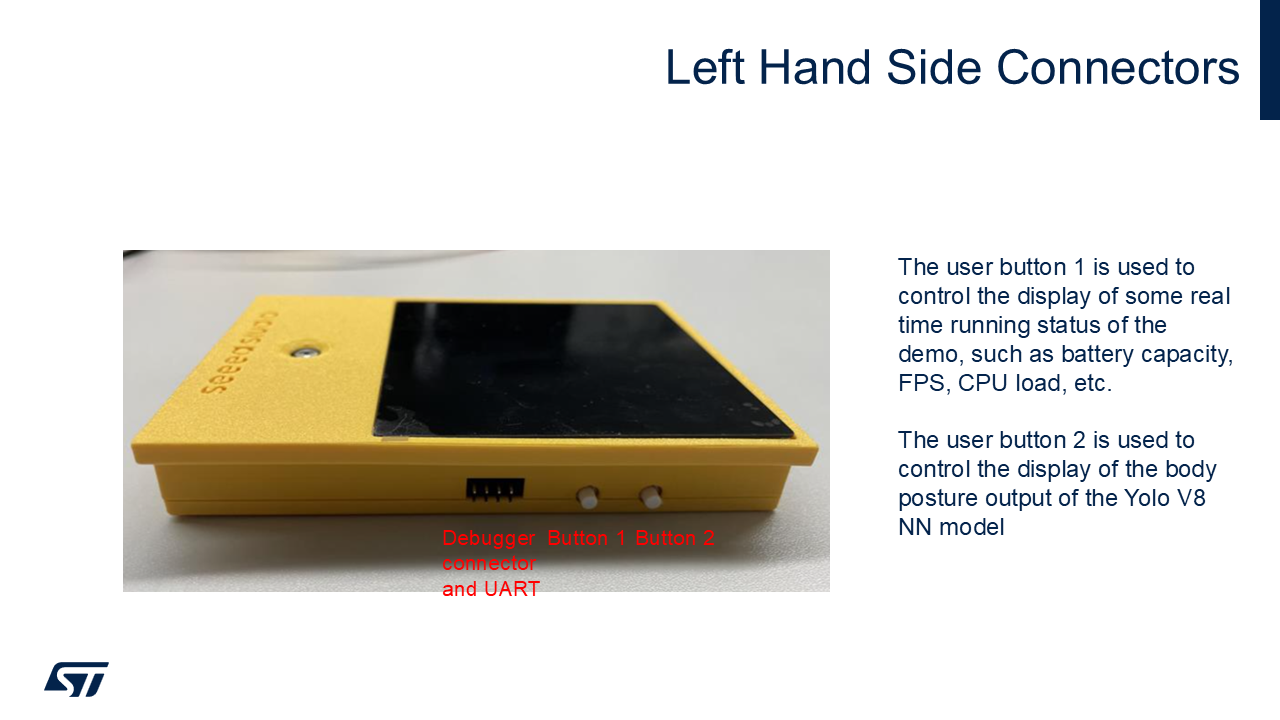
Conectores do lado esquerdo
Conexão do depurador
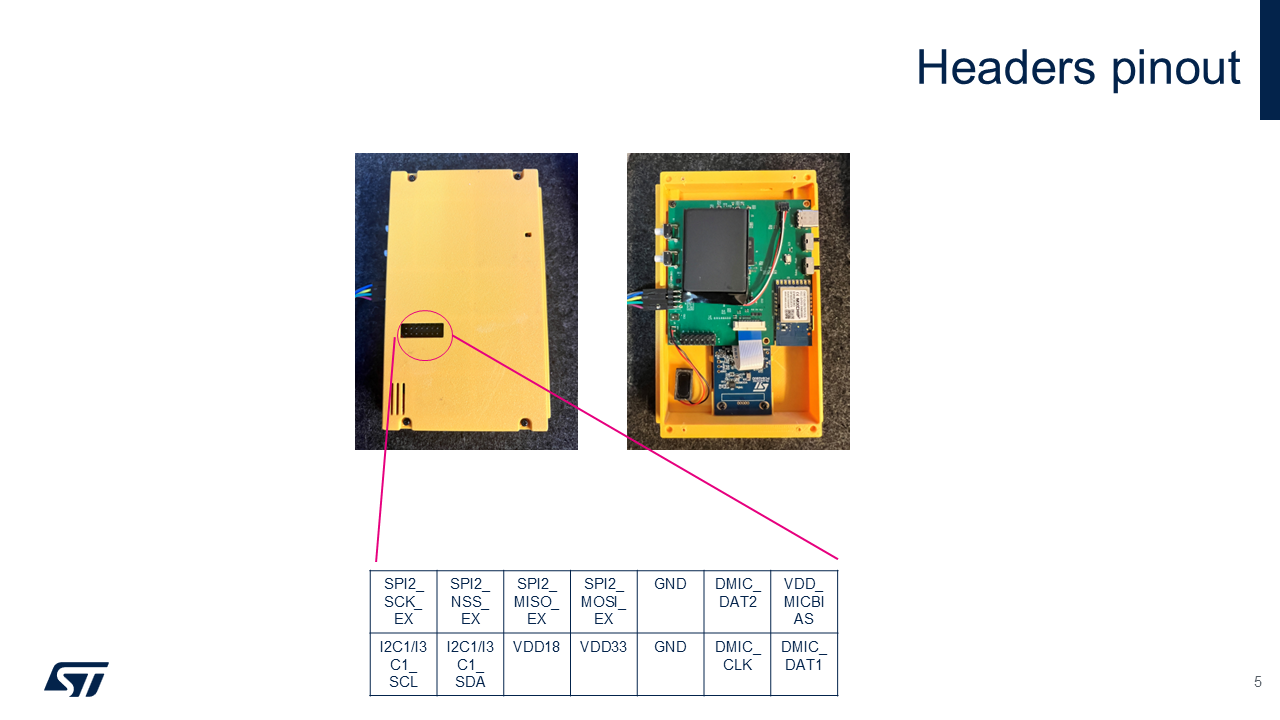
Pinagem dos headers
Modos de boot
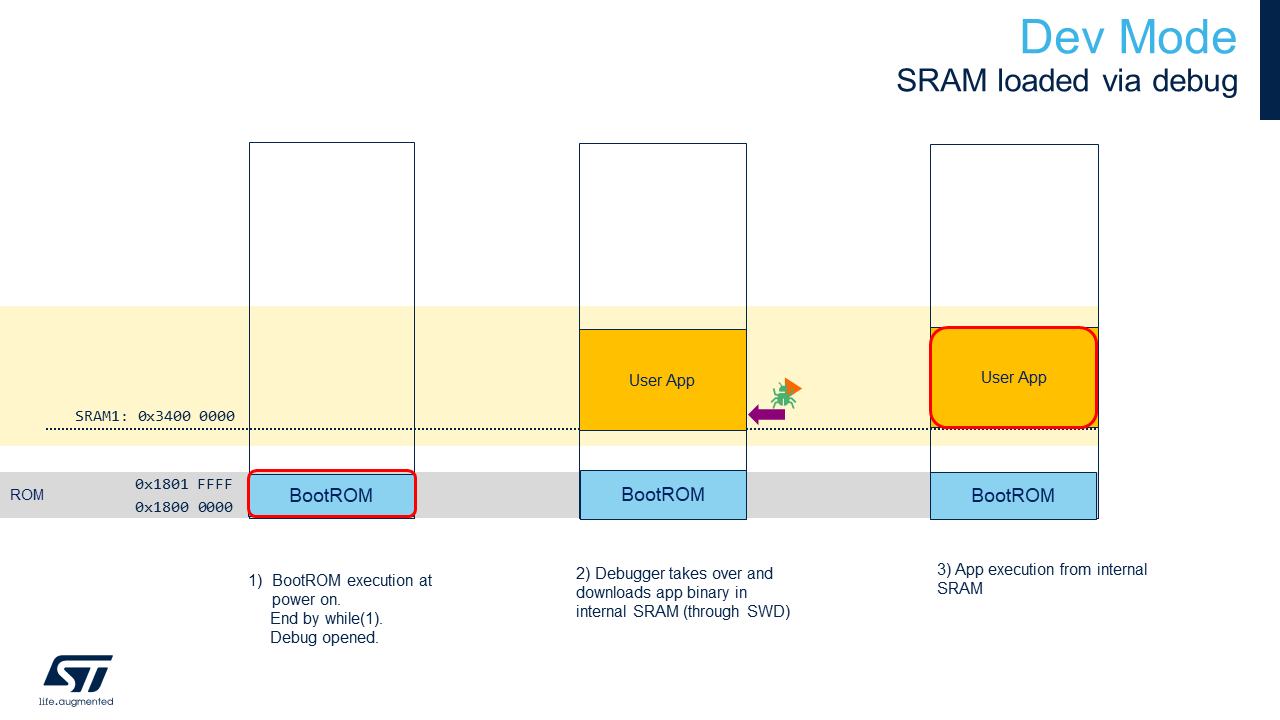
O STM32N6 não possui nenhuma flash interna. Para manter o seu firmware após uma reinicialização, você deve programá-lo na flash externa. Como alternativa, você pode carregar seu firmware diretamente da SRAM (modo de desenvolvimento). No entanto, no modo de desenvolvimento, se você desligar a placa, seu programa será perdido.
Modos de boot:
- Modo de desenvolvimento: carregar o firmware a partir da sessão de depuração na RAM (chave de boot para a direita)
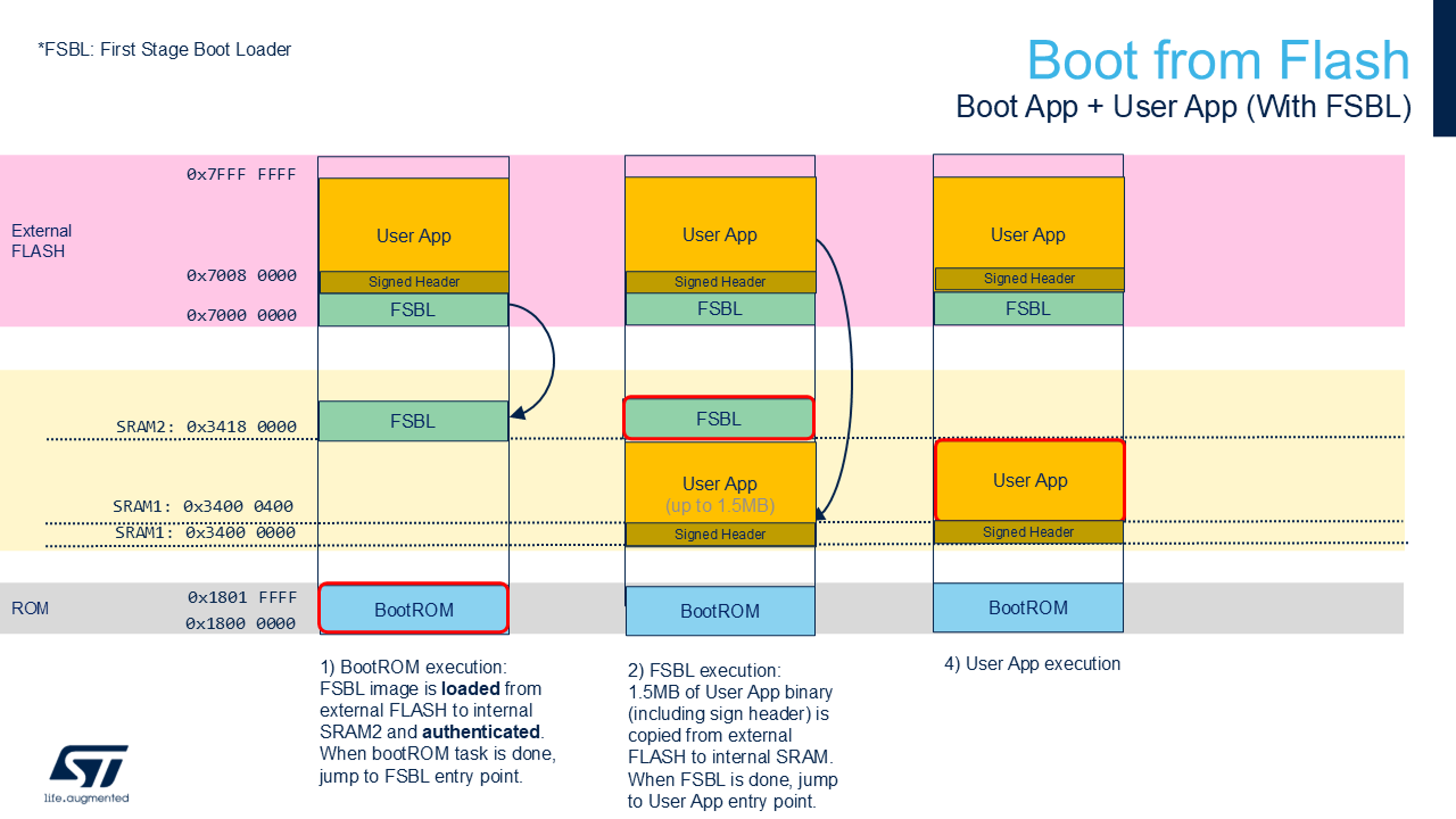
- Boot a partir da flash: programar o firmware na flash externa (chave de boot para a esquerda)
Início rápido usando binários pré-compilados
Gravar binários pré-compilados
Três binários devem ser programados na flash externa da placa usando o procedimento a seguir:
- Coloque a chave BOOT na posição superior.
- Grave
Binary/ai_assistant_fsbl.hex(a ser feito uma vez) (bootloader de primeira etapa). - Grave
Binary/network_data.hex(parâmetros das redes; a ser alterado apenas quando a rede for modificada). - Grave
Binary/AI_Assistant_Ref_Project.hex(aplicação de firmware). - Coloque a chave BOOT na posição inferior.
- Execute uma sequência de desligar/ligar a alimentação.
Como programar arquivos Hex usando a interface do STM32CubeProgrammer
Veja Como programar arquivos Hex STM32CubeProgrammer.
Como programar arquivos Hex usando a linha de comando
Certifique-se de ter a pasta bin do STM32CubeProgrammer adicionada ao seu path.
export DKEL="<STM32CubeProgrammer_N6 Install Folder>/bin/ExternalLoader/MX66UW1G45G_STM32N6570-DK.stldr"
# First Stage Boot Loader
STM32_Programmer_CLI -c port=SWD mode=HOTPLUG -el $DKEL -hardRst -w Binary/ai_fsbl.hex
# Network Parameters and Biases
STM32_Programmer_CLI -c port=SWD mode=HOTPLUG -el $DKEL -hardRst -w Binary/network_data.hex
# Application Firmware
STM32_Programmer_CLI -c port=SWD mode=HOTPLUG -el $DKEL -hardRst -w Binary/x-cube-n6-ai-people-detection.hex
Início Rápido Usando Código-Fonte
Antes de compilar e executar a aplicação, você precisa programar network_data.hex (pesos e vieses do modelo).
Esta etapa só precisa ser feita uma vez, a menos que você altere o modelo de IA. Consulte Início Rápido Usando Binários Pré‑compilados para mais detalhes.
Mais informações sobre os modos de boot estão disponíveis em Visão Geral do Boot .
Compilação e Execução da Aplicação - Modo Dev
Certifique‑se de deixar a chave na posição da direita.
STM32CubeIDE
Clique duas vezes em STM32CubeIDE/.project para abrir o projeto no STM32CubeIDE. Compile e execute com os botões de build e run.
Makefile
Antes de executar os comandos abaixo, certifique‑se de que eles estejam no seu PATH.
- Compile o projeto usando o
Makefilefornecido:
make -j8
- Abra um servidor GDB conectado ao alvo STM32:
ST-LINK_gdbserver -p 61234 -l 1 -d -s -cp <path-to-stm32cubeprogramer-bin-dir> -m 1 -g
- Em uma sessão de terminal separada, inicie uma sessão GDB para carregar a imagem do firmware na memória do dispositivo:
$ arm-none-eabi-gdb build/Project.elf
(gdb) target remote :61234
(gdb) monitor reset
(gdb) load
(gdb) continue
Compilação e Execução da Aplicação - Boot a partir da Flash
Certifique‑se de deixar a chave na posição da direita.
STM32CubeIDE
Clique duas vezes em STM32CubeIDE/.project para abrir o projeto no STM32CubeIDE. Compile com o botão de build.
Makefile
Antes de executar os comandos abaixo, certifique‑se de que eles estejam no seu PATH.
- Compile o projeto usando o
Makefilefornecido:
make -j8
Depois que seu app for compilado com Makefile, STM32CubeIDE ou EWARM, você pode adicionar uma assinatura ao arquivo bin:
STM32_SigningTool_CLI -bin build/Project.bin -nk -t ssbl -hv 2.3 -o build/Project_sign.bin
Você pode programar o arquivo bin assinado no endereço 0x70100000.
export DKEL="<STM32CubeProgrammer_N6 Install Folder>/bin/ExternalLoader/MX66UW1G45G_STM32N6570-DK.stldr"
# Adapt build path to your IDE
STM32_Programmer_CLI -c port=SWD mode=HOTPLUG -el $DKEL -hardRst -w build/Project_sign.bin 0x70100000
Nota: Somente o binário do App precisa ser programado se o FSBL e o network_data.hex já tiverem sido programados anteriormente.
Problemas Conhecidos e Limitações
- (NN_WIDTH * NN_BPP) deve ser múltiplo de 16.
- (LCD_BG_WIDTH * 2) deve ser múltiplo de 16.
Documentação Adicional da Aplicação
Visão Geral da Aplicação
Fluxo de Dados da Aplicação
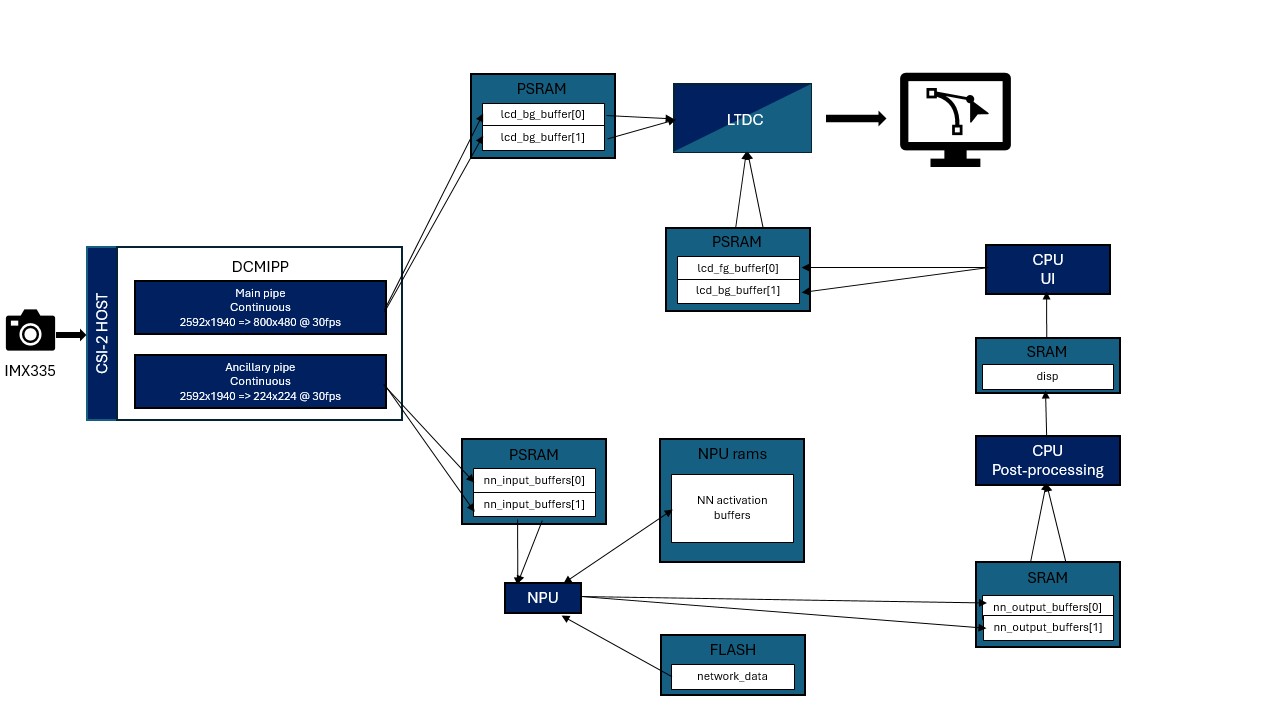
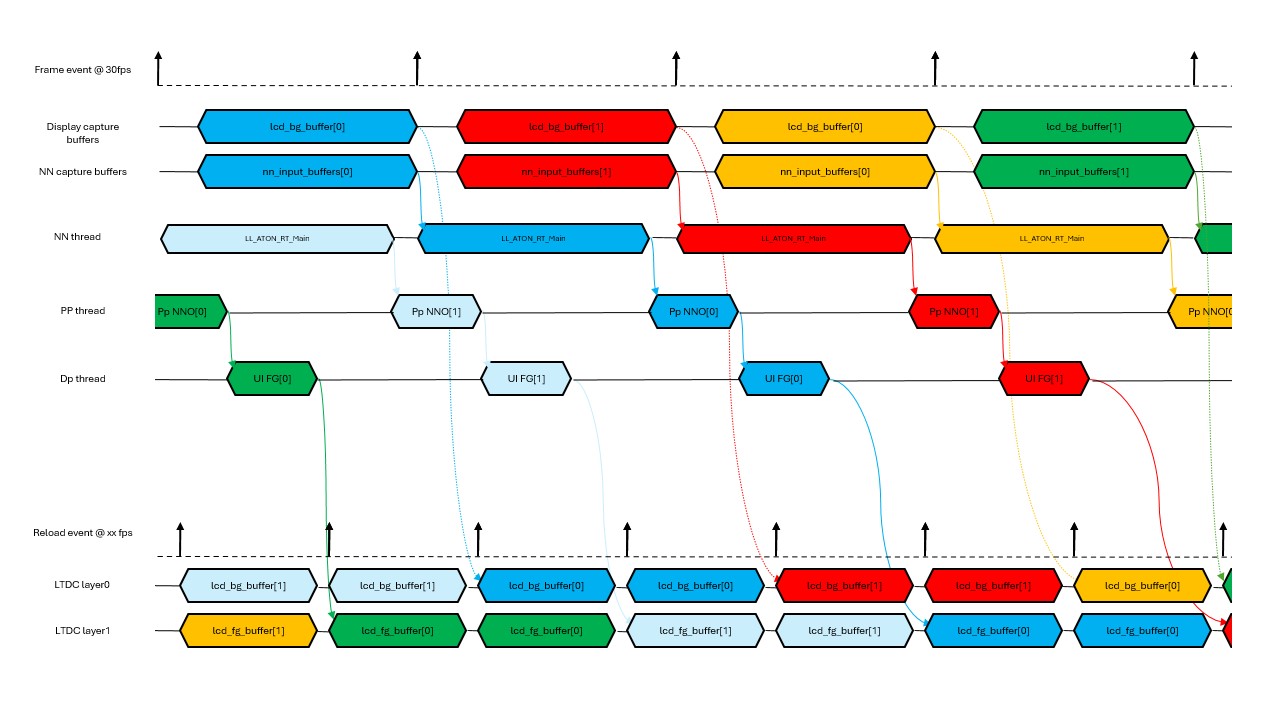
Diagrama de Temporização da Aplicação
Detalhes da Pegada de Memória
Dados Somente Leitura
| Nome | Tamanho | Local | Notas |
|---|---|---|---|
network_data | 10.59 MB | .rodata | FLASH xSPI2 8b |
Dados de Leitura e Escrita
| Nome | Tamanho | Local | Notas |
|---|---|---|---|
lcd_bg_buffer | 2300 KB | .psram_bss | PSRAM / (800x480x2) x 3 / RGB565 |
lcd_fg_buffer | 1500 KB | .psram_bss | PSRAM / (800x480x2) x 2 / ARGB4444 |
nn_input_buffers | 294 KB | .psram_bss | PSRAM / (224x224x3) x 2 / RGB888 |
nn_output_buffers | 12 KB | .bss | SRAM / 5880 x 2 |
activations | 507 KB | 0x34200000 | NPURAMS |
threads stacks | 20 KB | .bss | SRAM / 4096 * 5 |
DCMIPP e ISP
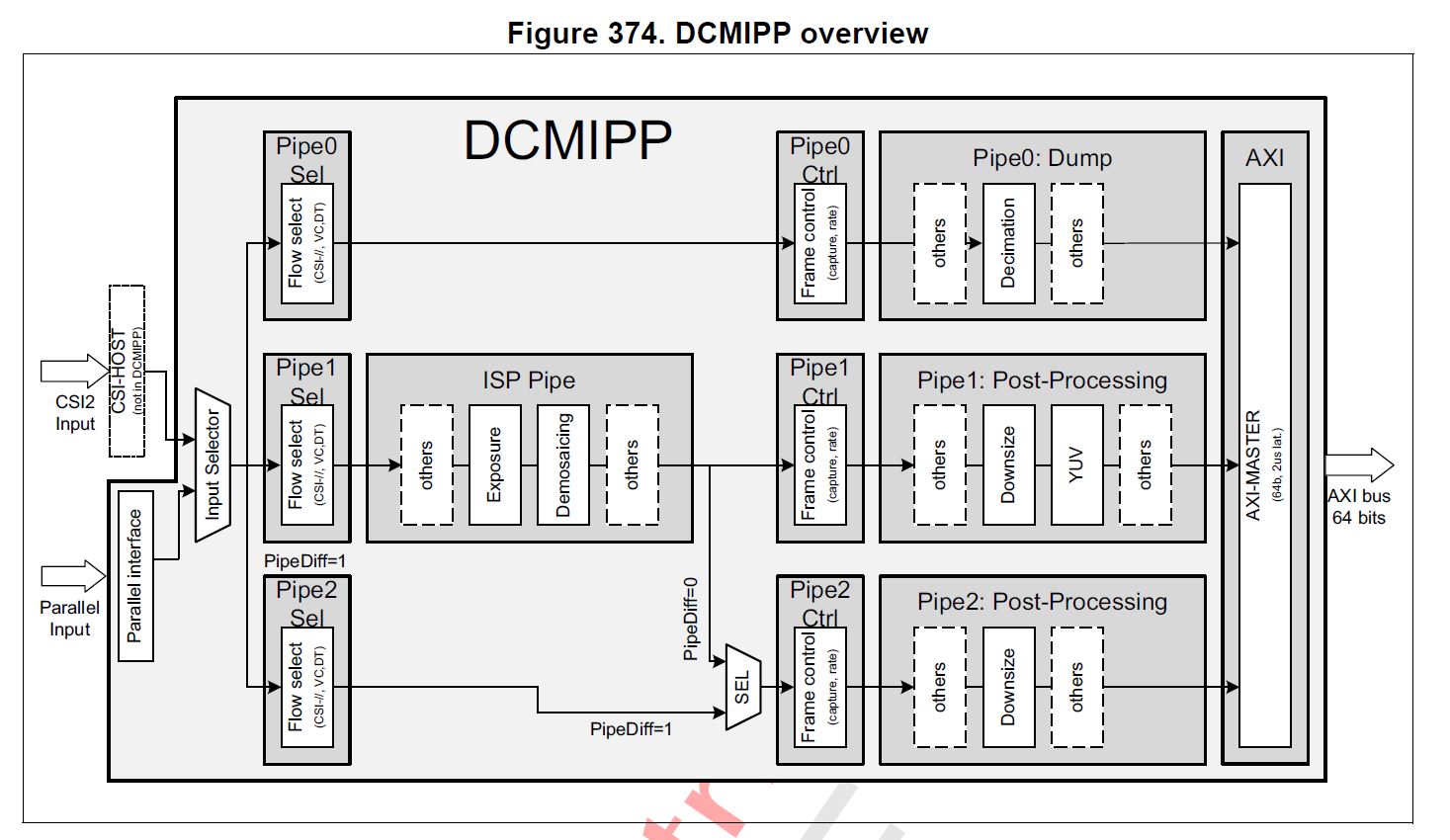
Visão Geral do DCMIPP
- O Pipe 1 é habilitado usando
CMW_CAMERA_Start(DCMIPP_PIPE1, *ptr_dst, CAMERA_MODE_CONTINUOUS);para transmitir continuamente imagens do imx335 para olcd_bg_buffer[]com DISPLAY_BUFFER_NB em buffer. Observe queptr_dstserá atualizado no frame_event do pipe1. - O Pipe 2 é habilitado usando
CMW_CAMERA_Start(DCMIPP_PIPE2, *ptr_dst, CAMERA_MODE_CONTINUOUS);para transmitir continuamente imagens do imx335 para onn_input_buffers[]com buffer duplo. Observe queptr_dstserá atualizado no frame_event do pipe2. Isso permite descartar o quadro anterior se o buffer ainda estiver em uso pela thread de nn. - Para cada captura, a configuração do ISP é atualizada para melhorar a qualidade da imagem dependendo das condições de iluminação. Ela é inicializada por meio de
ISP_Inite então executada comISP_BackgroundProcess.
Para mais detalhes sobre o DCMIPP, consulte a seção Digital Camera Interface Pixel Pipeline (DCMIPP) no Manual de Referência do STM32N6.
Visão Geral do Boot
Modo Dev
Boot a partir da Flash com First Stage Boot Loader
Opções de Compilação
Alguns recursos são habilitados usando opções de compilação ou por meio de app_config.h:
Esta documentação explica esses recursos e como modificá‑los.
Orientação da Câmera
As câmeras permitem inverter a imagem ao longo de dois eixos.
CMW_MIRRORFLIP_MIRROR: modo selfieCMW_MIRRORFLIP_FLIP: inverter de cabeça para baixoCMW_MIRRORFLIP_FLIP_MIRROR: inverter em ambos os eixosCMW_MIRRORFLIP_NONE: padrão
-
Abra app_config.h.
-
Altere a definição de
CAMERA_FLIP:
/* Defines: CMW_MIRRORFLIP_NONE; CMW_MIRRORFLIP_FLIP; CMW_MIRRORFLIP_MIRROR; CMW_MIRRORFLIP_FLIP_MIRROR; */
#define CAMERA_FLIP CMW_MIRRORFLIP_NONE
Faça o Deploy do Seu Modelo TFLite
Para executar seu próprio modelo de detecção de objetos, siga estas etapas:
- 1. Gerar Modelo em C a partir do Modelo TFLite
- 2. Programar Seus Dados de Rede
- 3. Fornecer Informações de NN em
app_config.h - 4. Compilar a Aplicação
- 5. Executar a Aplicação
1. Gerar Modelo em C a partir do Modelo TFLite
Para gerar o network.c, network_ecblobs.h e o arquivo que contém os parâmetros da rede, você deve instalar o STM32Cube.AI
-
Adicione
<folderInstall>/Utilities/<your_os>/ao seu path para questedgeaiseja reconhecido pelo seu bash. -
Adicione
<stm32cubeide_folderInstall>/plugins/com.st.stm32cube.ide.mcu.externaltools.gnu-tools-for-<plugin_version>/tools/binao seu path para quearm-none-eabi-objcopyseja reconhecido pelo seu bash.
cd Model
stedgeai generate --no-inputs-allocation --no-outputs-allocation --model quantized_tiny_yolo_v2_224_.tflite --target stm32n6 --st-neural-art default@user_neuralart.json
cp st_ai_output/network_ecblobs.h .
cp st_ai_output/network.c .
cp st_ai_output/network_atonbuf.xSPI2.raw network_data.xSPI2.bin
arm-none-eabi-objcopy -I binary network_data.xSPI2.bin --change-addresses 0x70380000 -O ihex network_data.hex
Você pode encontrar o seguinte script em Model/generate-n6-model.sh
2. Programar Seus Dados de Rede
Agora você pode programar seus dados de rede na flash externa.
export DKEL="<STM32CubeProgrammer_N6 Install Folder>/bin/ExternalLoader/MX66UW1G45G_STM32N6570-DK.stldr"
# Weights and parameters
STM32_Programmer_CLI -c port=SWD mode=HOTPLUG -el $DKEL -hardRst -w Model/network_data.hex
3. Fornecer Informações de NN em app_config.h
Você precisa editar as últimas linhas de Inc/app_config.h para tornar o app compatível com sua rede.
Tipo de Pós‑processamento
Esta aplicação suporta quatro tipos de pós‑processamento de detecção de objetos. Você pode selecionar um deles. Edite POSTPROCESS_TYPE com um destes valores.
#define POSTPROCESS_OD_YOLO_V2_UF (10) /* Yolov2 postprocessing; Input model: uint8; output: float32 */
#define POSTPROCESS_OD_YOLO_V5_UU (11) /* Yolov5 postprocessing; Input model: uint8; output: uint8 */
#define POSTPROCESS_OD_YOLO_V8_UF (12) /* Yolov8 postprocessing; Input model: uint8; output: float32 */
#define POSTPROCESS_OD_YOLO_V8_UI (13) /* Yolov8 postprocessing; Input model: uint8; output: int8 */
Informações de Tamanho da NN
Edite seus NN_WIDTH e NN_HEIGHT.
AVISO: NN_WIDTH * NN_BPP deve ser múltiplo de 16.
AVISO: Somente o formato RGB888 foi testado.
Rótulos de Classe
Modifique NB_CLASSES e classes_table com seus próprios rótulos de classe e número de classes.
Atraso de Exibição
Usar DISPLAY_DELAY permite atrasar a imagem exibida para que as informações exibidas pelo modelo fiquem alinhadas com a imagem mostrada. Ajuste esse valor de acordo com o tempo de inferência do modelo.
Configurar Parâmetros de Pós‑processamento por Arquivo de Usuário
Para alterar seus parâmetros de pós‑processamento, você precisa editar o Inc/postprocess_conf.h.
A documentação da biblioteca de pós‑processamento está disponível em Postprocess lib.
Você pode editar os limiares de IOU, valores de âncora e outros parâmetros.
Alguns desses parâmetros precisam estar alinhados com seu modelo (número de classes, por exemplo).
Configurar Tamanho do Buffer de Saída
Edite NN_BUFFER_OUT_SIZE para que ele tenha o tamanho em bytes do seu tensor de saída.
4. Compilar a Aplicação
Depois que seus dados de rede tiverem sido programados (etapa 2) e os detalhes da rede configurados (etapa 3), você pode compilar sua aplicação seguindo:
Compilação e execução da aplicação
5. Executar o Aplicativo
Modo de Desenvolvimento
Consulte a seção Compilar e executar o aplicativo para mais detalhes.
Inicializar a partir da Flash
Consulte Programar aplicativo na flash externa para programar o seu firmware.
Como Programar Arquivos Hex
- Certifique-se de que a placa está em modo de desenvolvimento (chave de boot na posição de modo de desenvolvimento).
- Abra o STM32CubeProgrammer.
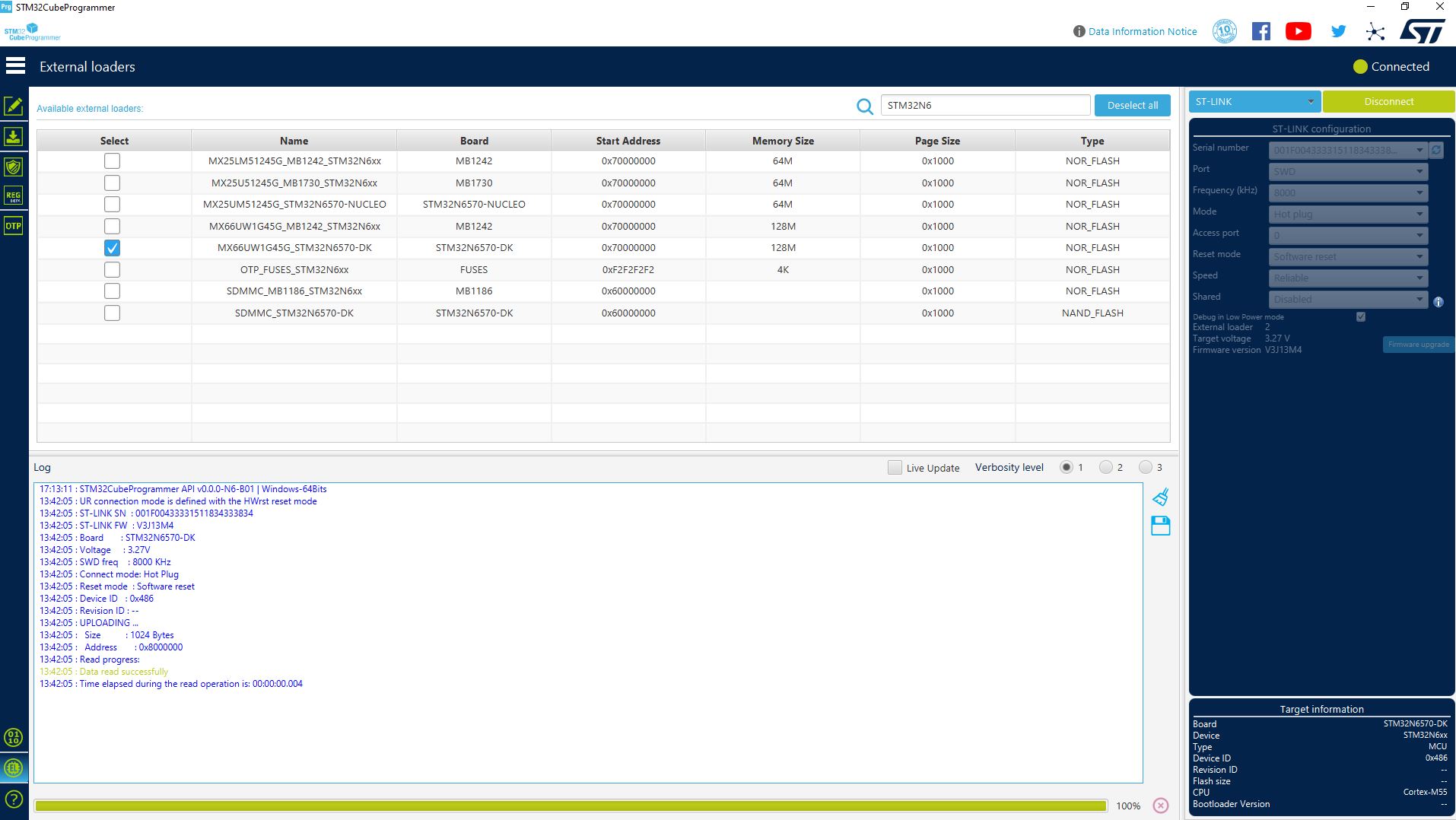
- Selecione a flash MX66UW1G45G_STM32N6570-DK na aba External loaders.
- Configuração do ST-Link: defina o modo como "Hot plug".
- Conecte a placa.
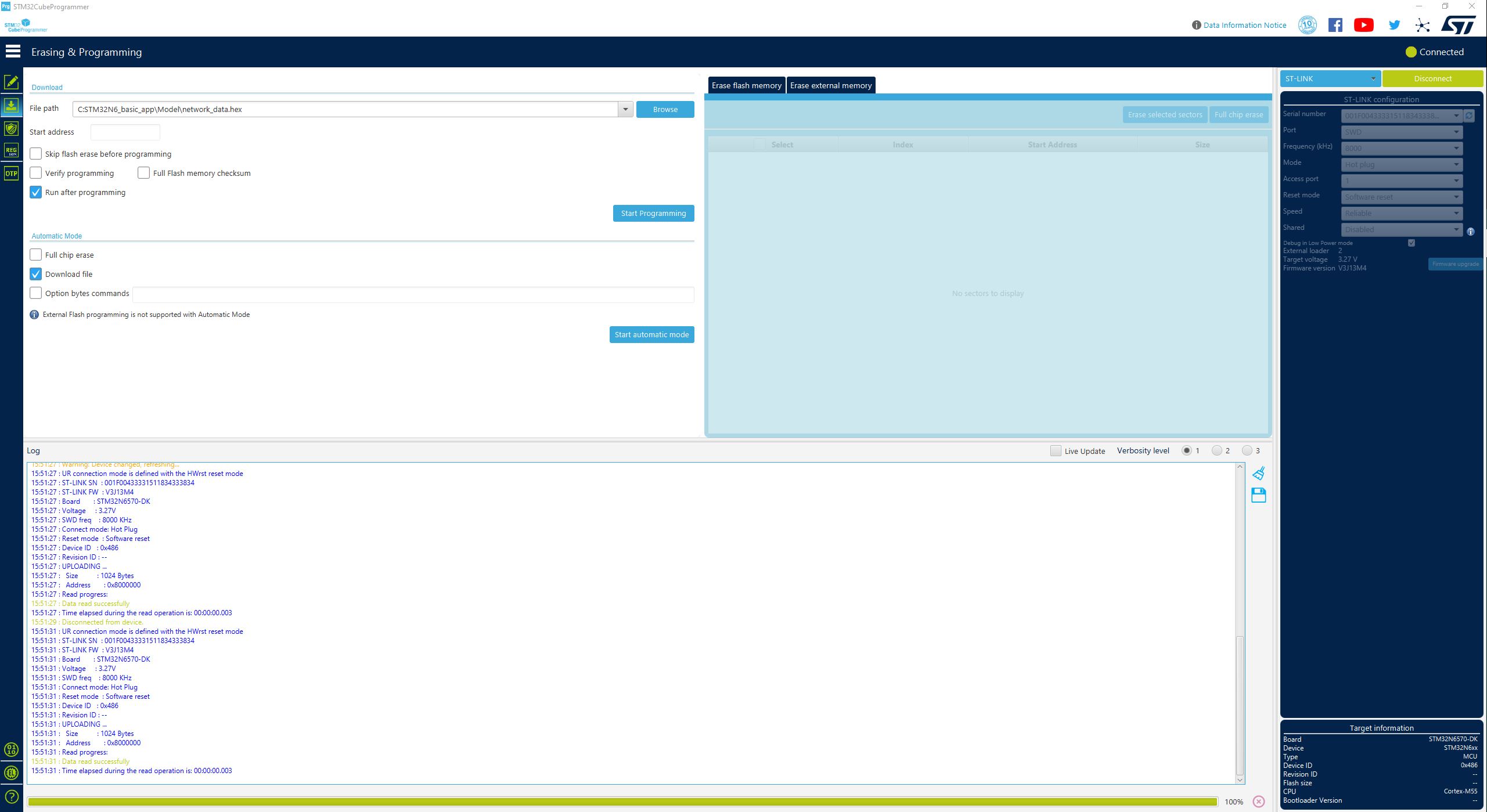
- Na aba "Erasing & programming", selecione o arquivo
Binary/ai_assistant_fsbl.hex. - Aguarde a conclusão da gravação.
- Na aba "Erasing & programming", selecione o arquivo
Binary/network_data.hex. - Aguarde a conclusão da gravação.
- Na aba "Erasing & programming", selecione o arquivo
Binary/AI_Assistant_Ref_Project.hex. - Aguarde a conclusão da gravação.
Recursos
Suporte Técnico
Este produto é suportado pela STMicroelectronics. Para qualquer problema técnico ou dúvida, entre em contato: Contato de Suporte Técnico: [Clique aqui]