Controle vários robôs Reachy Mini com um console de dança de frota no Jetson
Introdução
Este wiki mostra como criar uma demonstração de dança multi-robô com Reachy Mini e dispositivos Jetson.
Neste projeto, cada Jetson executa um serviço local de dança Reachy Mini em Docker, expondo tanto uma Web UI quanto uma REST API. Um painel de Controle de Frota separado, baseado em laptop, pode então descobrir vários IPs de Jetson na mesma LAN e transmitir os mesmos comandos de dança para todos os robôs Reachy Mini conectados ao mesmo tempo.
O resultado final é uma demonstração em que você pode:
- executar um Reachy Mini por dispositivo Jetson
- abrir um painel central no navegador do seu laptop
- adicionar dinamicamente vários endereços IP de Jetson
- iniciar ou parar a dança de todos os robôs juntos
- alterar BPM, estilo de dança e energia para toda a frota
- acionar ações de acento e centro em todos os robôs de uma vez
Este projeto contém duas camadas:
reachy_bpm_dancer: o serviço de robô único que roda em cada Jetsonreachy_fleet_control: o painel central de frota que roda no laptop
Sumário
- Preparação de hardware
- Arquitetura do sistema
- Preparar cada Jetson para o Reachy Mini
- Implantar o serviço de dança Reachy Mini em Docker
- Executar o painel de Controle de Frota no laptop
- Controlar vários robôs Reachy Mini
- Referência da REST API
- Solução de problemas
- Referências
Preparação de hardware
Lista de dispositivos
- 1 x laptop Windows ou PC de controle na mesma LAN
- 1 ou mais dispositivos Jetson
- 1 Reachy Mini conectado a cada Jetson via USB
- 1 roteador ou switch de rede para acesso à LAN
Este fluxo de trabalho é adequado para dispositivos de borda baseados em Jetson, incluindo dispositivos da série Seeed reComputer Jetson, desde que o sistema de destino possa executar Docker e acessar o Reachy Mini via serial USB.
| reComputer Mini J501 Kit | Reachy Mini Lite |
|---|---|
 |  |
Fiação e conexão
Para cada nó de robô:
- conecte o Reachy Mini ao Jetson via USB
- ligue o Jetson
- certifique-se de que o laptop e todos os dispositivos Jetson estejam na mesma LAN
Checklist de inicialização
Em cada Jetson, verifique se o dispositivo serial do Reachy Mini está visível:
ls /dev/ttyACM*
Se você conseguir ver um dispositivo como /dev/ttyACM0, o link de hardware está pronto.
Arquitetura do sistema
Esta demonstração usa um design em estrela (hub-and-spoke):
- cada Jetson hospeda um contêiner de dança Reachy Mini
- cada contêiner expõe a Web UI local do robô e a REST API na porta
8042 - o laptop executa uma aplicação web de Controle de Frota na porta
8060 - o laptop consulta todas as APIs dos Jetson e distribui os mesmos comandos de controle para todos os robôs online
O serviço do lado do Jetson é projetado para controle de movimento simbólico de baixa latência. Ele usa um loop leve set_target() e não depende de entrada de microfone ou câmera.
Layout de rede sugerido:
Laptop (Fleet Control, port 8060)
|- Jetson A -> Reachy Mini A -> http://<jetson-a-ip>:8042
|- Jetson B -> Reachy Mini B -> http://<jetson-b-ip>:8042
|- Jetson C -> Reachy Mini C -> http://<jetson-c-ip>:8042
Preparar cada Jetson para o Reachy Mini
Execute as etapas a seguir em cada Jetson que irá controlar um Reachy Mini.
sudo apt update
sudo apt install -y nvidia-container curl
curl https://get.docker.com | sh && sudo systemctl --now enable docker
sudo nvidia-ctk runtime configure --runtime=docker
sudo systemctl restart docker
sudo usermod -aG docker $USER
newgrp docker
sudo apt install -y jq
sudo jq '. + {"default-runtime": "nvidia"}' /etc/docker/daemon.json | \
sudo tee /etc/docker/daemon.json.tmp && \
sudo mv /etc/docker/daemon.json.tmp /etc/docker/daemon.json
sudo systemctl daemon-reload && sudo systemctl restart docker
Implantar o serviço de dança Reachy Mini em Docker
Baixar e executar a imagem Docker
Baixe a imagem Docker a partir daqui.
Se você recebeu uma imagem empacotada como reachy-bpm-dancer_20260323_linux-arm64.tar.gz:
docker load -i reachy-bpm-dancer_20260323_linux-arm64.tar.gz
docker run -d \
--name reachy-bpm-dancer \
--restart unless-stopped \
-p 8042:8042 \
-p 8000:8000 \
--device /dev/ttyACM0:/dev/ttyACM0 \
-e REACHY_SERIAL_PORT=/dev/ttyACM0 \
reachy-bpm-dancer:20260323-arm64
Verificar o serviço do lado do Jetson
Abra a UI local de robô único:
http://<jetson-ip>:8042/
Abra a documentação da API:
http://<jetson-ip>:8042/docs
Verifique o status do robô a partir do terminal:
curl http://127.0.0.1:8042/api/status
Inicie a dança do robô:
curl -X POST http://127.0.0.1:8042/api/dance/start \
-H "Content-Type: application/json" \
-d '{"bpm":124,"style":"anthem","energy":1.15}'
Pare o robô:
curl -X POST http://127.0.0.1:8042/api/dance/stop
O serviço do lado do Jetson expõe:
- Web UI na porta
8042 - REST API na porta
8042 - daemon Reachy Mini na porta
8000
Executar o painel de Controle de Frota no laptop
O painel de Controle de Frota é executado separadamente no seu laptop e permite gerenciar todos os nós Jetson a partir de um único navegador.
Preparar o ambiente Python local
No laptop:
git clone https://github.com/yuyoujiang/reachy_fleet_control
cd reachy_fleet_control
python -m venv .venv
.\.venv\Scripts\python -m pip install -e .
Esta demonstração usa Windows. Se o seu PC executar um sistema operacional diferente, use os comandos correspondentes para instalar o ambiente.
Iniciar a Web UI de Controle de Frota
.\.venv\Scripts\python -m uvicorn reachy_fleet_control.main:app --host 0.0.0.0 --port 8060
Em seguida, abra:
http://127.0.0.1:8060/
Ou acesse a partir de outro dispositivo na LAN:
http://<laptop-ip>:8060/
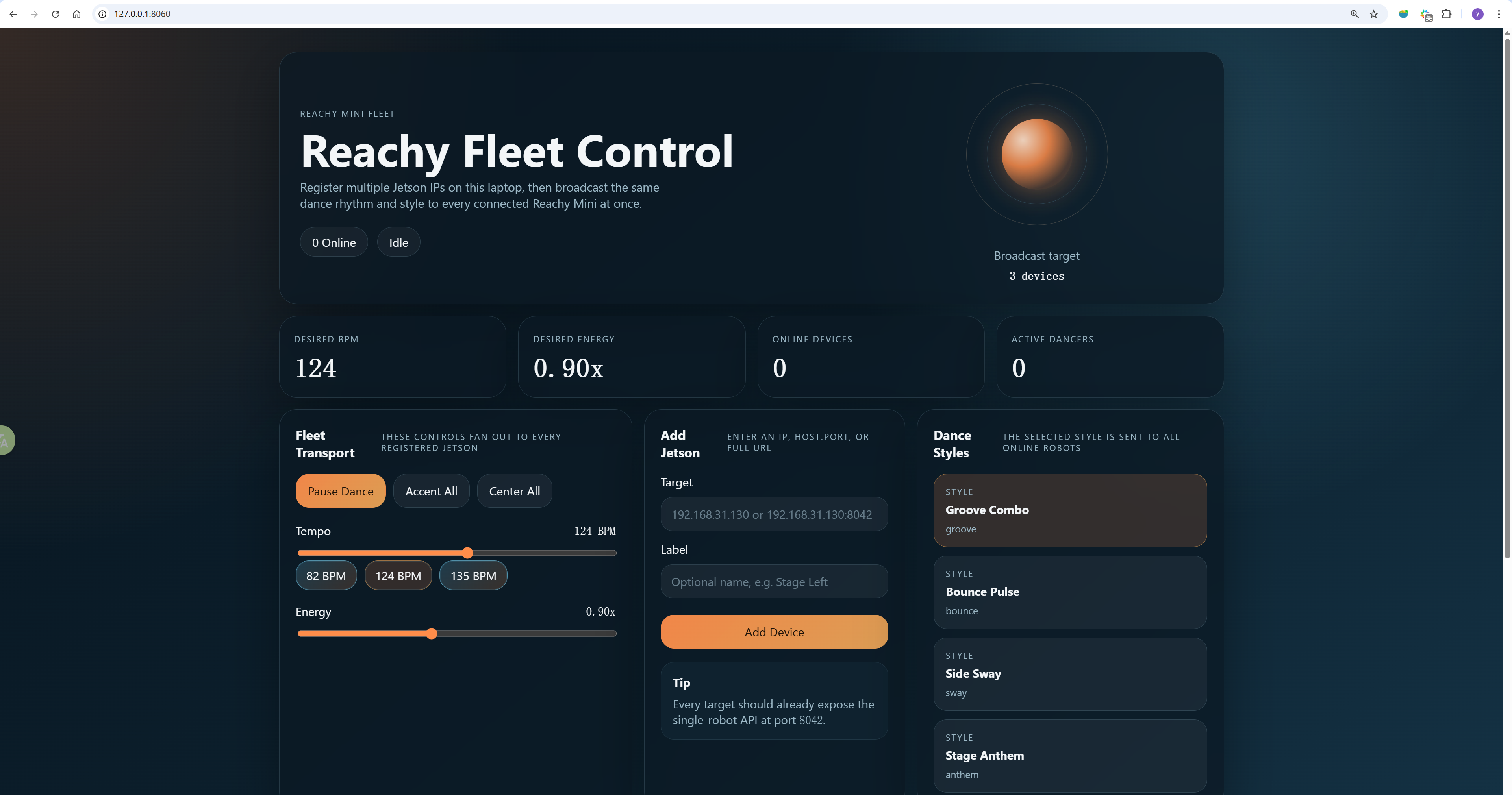
Funcionalidades do painel de frota
O painel oferece suporte a:
- adicionar IPs de Jetson,
host:portou URLs completas - remover nós Jetson offline ou não utilizados
- monitorar status online e latência por robô
- transmitir comandos de dança para cada Reachy Mini registrado
- manter a lista de dispositivos em um arquivo de estado local
A lista de dispositivos é armazenada localmente no Windows em:
C:\Users\<username>\.reachy_fleet_control\fleet_state.json
Controlar vários robôs Reachy Mini
Quando ambas as camadas estiverem em execução, o fluxo de trabalho multi-robô é direto.
Etapa 1. Adicionar dispositivos Jetson
Na página de Controle de Frota:
- insira um IP de Jetson como
192.168.1.130 - opcionalmente adicione um rótulo
- clique em Add Device
Repita a mesma etapa para cada Jetson na LAN.
Etapa 2. Verificar status online
Cada cartão de dispositivo exibirá:
- endpoint
- rótulo
- estado online ou offline
- BPM atual
- contagem de batidas
- latência
Se um dispositivo estiver offline, o painel o manterá na lista e continuará consultando até que ele volte.
Etapa 3. Transmitir um comando de dança
Use os controles compartilhados para atualizar todos os robôs de uma vez:
- Start Dance
- Pause Dance
- Accent All
- Center All
- presets de BPM:
82,124,135 - seleção de estilo:
groove,bounce,sway,anthem - controle deslizante de energia
Etapa 4. Observar a frota
Quando a transmissão for bem-sucedida:
- todos os robôs Reachy Mini online mudam para o mesmo BPM desejado
- o estilo selecionado é aplicado a todos os robôs
- a contagem de dispositivos ativos é atualizada no painel
- cada Jetson continua gerando movimento localmente, então pequenos atrasos de rede não interrompem o loop de dança
Demonstração do efeito
Referência da REST API
Este projeto expõe duas camadas de API.
API de robô único do lado do Jetson
URL base:
http://<jetson-ip>:8042
Endpoints disponíveis:
GET /apiGET /api/statusGET /api/stylesGET /api/presetsPOST /api/settingsPOST /api/dance/startPOST /api/dance/stopPOST /api/dance/accentPOST /api/dance/center
Exemplo:
curl -X POST http://<jetson-ip>:8042/api/dance/start \
-H "Content-Type: application/json" \
-d '{"bpm":135,"style":"anthem","energy":1.2}'
API de frota do lado do laptop
URL base:
http://<laptop-ip>:8060
Endpoints disponíveis:
GET /apiGET /api/fleet/statusPOST /api/fleet/devicesDELETE /api/fleet/devices?endpoint=<host:port>POST /api/fleet/settingsPOST /api/fleet/dance/startPOST /api/fleet/dance/stopPOST /api/fleet/dance/accentPOST /api/fleet/dance/center
Adicionar um dispositivo Jetson:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/devices" `
-Method Post `
-ContentType "application/json" `
-Body '{"target":"192.168.1.130","label":"Stage Left"}'
Iniciar todos os robôs:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/dance/start" `
-Method Post `
-ContentType "application/json" `
-Body '{"bpm":124,"style":"anthem","energy":1.15}'
Parar todos os robôs:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/dance/stop" `
-Method Post
Solução de problemas
Reachy Mini não é detectado no Jetson
Verifique se o nó serial USB existe:
ls /dev/ttyACM*
Se necessário, atualize o mapeamento de dispositivo do Docker e o valor de REACHY_SERIAL_PORT.
A porta 8042 ou 8060 já está em uso
Pare o processo antigo ou escolha uma porta diferente antes de iniciar o serviço novamente.
O painel da frota mostra um dispositivo como offline
Verifique o seguinte:
- o laptop e o Jetson estão na mesma LAN
- o serviço do Jetson está em execução
- o firewall do Jetson não bloqueia a porta
8042 - o endereço IP inserido no painel está correto
O robô não se move, mas a API responde
Verifique os logs do contêiner no Jetson:
docker compose logs -f
Também confirme que:
- Reachy Mini está conectado ao Jetson
- o caminho do dispositivo serial corresponde à configuração do contêiner
- o robô não está sendo usado por outro processo
Referências
Suporte técnico e discussão sobre o produto
Obrigado por escolher nossos produtos! Estamos aqui para oferecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.