Hardware do Robotics J501 e Primeiros Passos
O reComputer Robotics J501 é uma placa carrier de IA de borda de alto desempenho projetada para aplicações avançadas de robótica e industriais. Compatível com módulos NVIDIA Jetson AGX Orin (32GB/64GB) no modo MAXN, oferece até 275 TOPS de desempenho de IA.
Equipada com amplas opções de conectividade — incluindo 1x 10GbE e 4x portas Ethernet 1GbE, dois slots M.2 Key M para SSDs NVMe, slots M.2 para módulos 5G e Wi‑Fi/BT, múltiplas portas USB 3.0, quatro interfaces CAN (2 nativas + 2 SPI-para-CAN), expansão de câmera GMSL2 e E/S abrangente incluindo DI/DO, I2S, UART e RS485 — ela atua como um poderoso cérebro robótico para fusão de múltiplos sensores complexos e processamento de IA em tempo real.
Pré-instalada com JetPack 6.2.1 e Linux BSP, garante uma implantação perfeita. Com suporte a frameworks como NVIDIA Isaac ROS, Hugging Face, PyTorch e ROS 2/1, o J501 conecta a tomada de decisão orientada por modelos de linguagem grandes ao controle físico de robôs, acelerando o desenvolvimento de robôs autônomos com interfaces prontas para uso e frameworks de IA otimizados.

Principais Recursos
- IA de alto desempenho: Até 275 TOPS com módulos Jetson AGX Orin 32/64GB, GPU Ampere e mecanismos DLA
- Conectividade rica: Dois M.2 Key M (NVMe); Key E (Wi‑Fi/BT) + Key B (5G); 1x 10GbE + 4x 1GbE; 3x USB 3.0; 2x USB‑C
- Quad CAN-FD: 2x nativos + 2x interfaces SPI-para-CAN com isolamento elétrico
- Visão GMSL2: Interface GMSL2 única (1x) para conexão de câmera em alta velocidade
- Design industrial: Entrada DC 19–48V; operação -10~60°C; interfaces isoladas; JetPack 6.2.1 pré-instalado
- Pronto para robótica: Suporte a ROS 2/1, Isaac ROS; DI/DO, I2S, UART, RS485; otimizado para AMR e automação
Especificações
| Módulo Jetson AGX Orin System on Module | ||
|---|---|---|
| Especificações | reComputer Robotics J5011 | reComputer Robotics J5012 |
| Módulo | NVIDIA Jetson AGX Orin 32GB | NVIDIA Jetson AGX Orin 64GB |
| Desempenho de IA | 200 TOPS | 275 TOPS |
| GPU | 1792 núcleos NVIDIA Ampere @ 930 MHz | 2048 núcleos NVIDIA Ampere @ 1,3 GHz |
| CPU | 8 núcleos Arm Cortex-A78AE @ 2,0 GHz | 12 núcleos Arm Cortex-A78AE @ 2,2 GHz |
| Memória | 32GB 256-bit LPDDR5 @ 204,8 GB/s | 64GB 256-bit LPDDR5 @ 204,8 GB/s |
| Codificador de Vídeo | 1x 4K60 / 3x 4K30 / 6x 1080p60 / 12x 1080p30 (H.265) | 2x 4K60 / 6x 4K30 / 8x 1080p60 / 16x 1080p30 (H.265) |
| Decodificador de Vídeo | 1x 8K30 / 2x 4K60 / 4x 4K30 / 9x 1080p60 / 18x 1080p30 (H.265) | 1x 8K30 / 3x 4K60 / 7x 4K30 / 11x 1080p60 / 22x 1080p30 (H.265) |
| Câmera CSI | Até 6 câmeras (16 via canais virtuais) 16 pistas MIPI CSI-2 D-PHY 2.1 (até 40Gbps) / C-PHY 2.0 (até 164Gbps) | |
| Mecânico | 100mm x 87mm Conector Molex Mirror Mezz de 699 pinos Placa de Transferência Térmica Integrada | |
| Placa Carrier | ||
| Armazenamento | 2x M.2 Key-M (SSD NVMe 2280) 1x M.2 Key-B (para módulos 4G/5G) | |
| Rede | 1x M.2 Key-E (Wi‑Fi/BT) 1x RJ45 10GbE + 4x RJ45 1GbE | |
| USB | 3x USB 3.0 Tipo-A 1x USB 3.0 Tipo-C (Recovery) 1x USB 2.0 Tipo-C (Debug UART) | |
| DI/DO/CAN | 1x bloco de terminais 2x10P 3,81mm - 4x DI @12V + 4x DO @40V + 4x CAN (suporta CAN-FD, eletricamente isolado) | |
| GMSL | 2x Conectores Mini-Fakra (para 8x câmeras GMSL2) (opcional) | |
| Serial | 2x DB9 (RS232/422/485) | |
| Display | 1x HDMI 2.1 | |
| Ventoinha | 1×12 V (2,54 mm), 1×5 V (1,25 mm JST) | |
| Botão | 1x Recovery + 1x Reset | |
| LED | 3x LED (PWR, SSD e LED de usuário) | |
| RTC | 1x suporte para bateria CR1220, 1x header RTC de 2 pinos | |
| Entrada de Energia | 19–48V DC via bloco de terminais 5,08mm (adaptador de energia não incluído) | |
| Consumo de Energia | Módulo Jetson AGX Orin: até 60W (modo MAXN) Pico total do sistema: 75W (incluindo periféricos) | |
| Software | Jetpack 6.2.1 | |
| Mecânico | Dimensões: 210mm x 180mm x 87mm (com pés) | |
| Garantia | 2 Anos | |
| Certificação | RoHS, REACH, CE, FCC, UKCA, KC | |
Especificações da Placa de Extensão GMSL (Opcional)
| Deserializador | MAX96712 |
|---|---|
| Interface GMSL | 2x Conectores Robotics-Fakra macho |
| Entrada GMSL | Até 8x câmeras GMSL2 |
| Método de Conexão | Cabo GMSL2 Fakra 1-para-4 M-M |
| Recurso da Interface POC | Suporta transmissão simultânea de energia e dados |
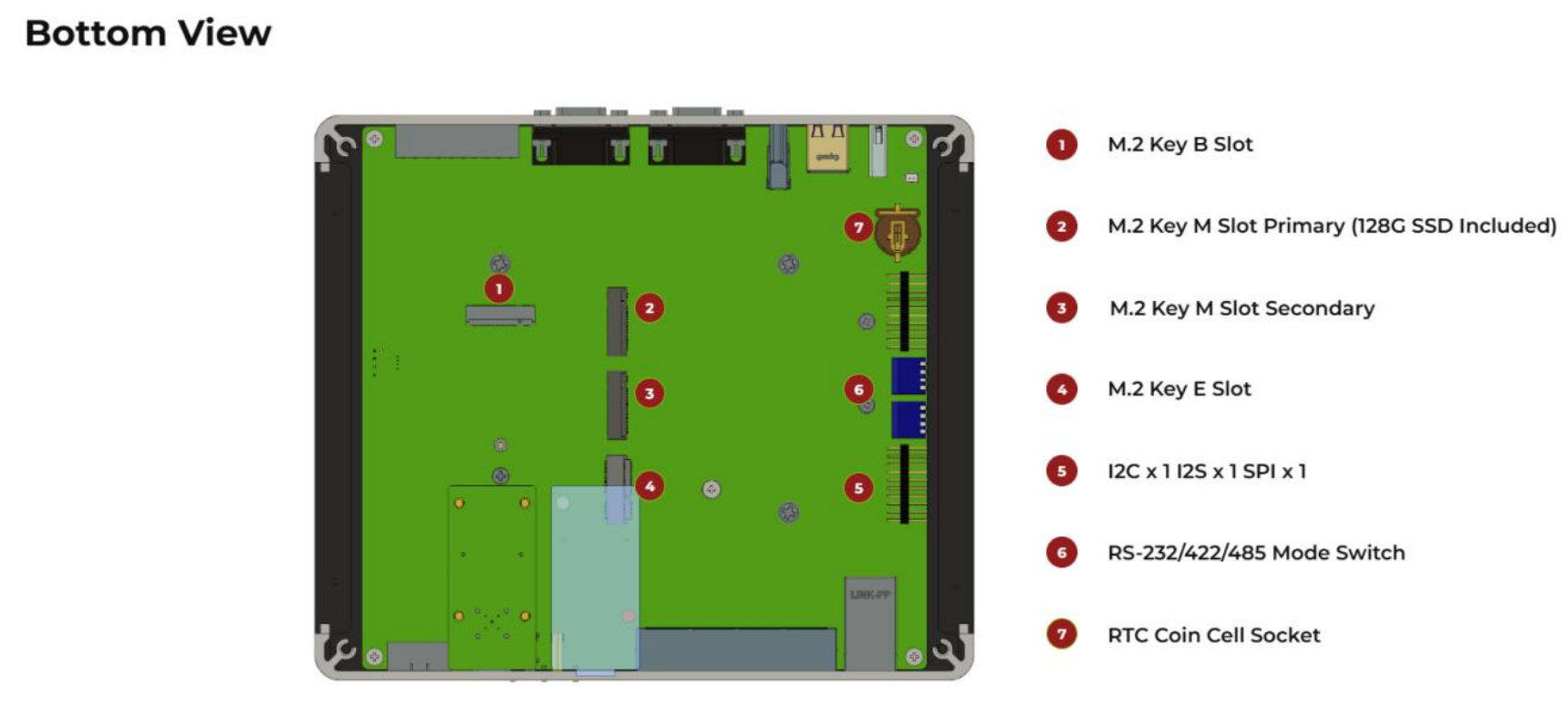
Visão Geral do Hardware


📦 Gravar o JetPack OS
Módulo Suportado
Pré-requisitos
- PC host com Ubuntu
- reComputer Robotics J501
- Cabo USB Tipo‑C para transmissão de dados
Recomendamos que você use dispositivos host físicos com Ubuntu em vez de máquinas virtuais. Consulte a tabela abaixo para preparar a máquina host.
| Versão do JetPack | Versão do Ubuntu (Computador Host) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
Preparar a Imagem do Jetpack
Aqui, precisamos baixar a imagem do sistema para o nosso PC com Ubuntu correspondente ao módulo Jetson que estamos usando:
| Versão do Jetpack | Módulo Jetson | GMSL | Link de Download1 | SHA256 |
|---|---|---|---|---|
| 6.2.1 | AGX Orin 64GB | ✅ | Download | 46167c63566fa07d9882be338becd44 7021c8fc0a73da18d0291c414cf5c6f4a |
| AGX Orin 32GB | ✅ | Download | e868fd8c7ad05d3acc8c9808f42e1835 28f11df14f48cb6ae16464adb4f23d1f |
O arquivo de imagem do Jetpack6 tem aproximadamente 14,2GB de tamanho e deve levar cerca de 60 minutos para ser baixado. Aguarde até que o download seja concluído.
Para verificar a integridade do firmware baixado, você pode comparar o valor de hash SHA256.
Em uma máquina host com Ubuntu, abra o terminal e execute o comando sha256sum <File> para obter o valor de hash SHA256 do arquivo baixado. Se o hash resultante corresponder ao hash SHA256 fornecido na wiki, isso confirma que o firmware que você baixou está completo e íntegro.
⚙️ Todos os arquivos .dts e outros códigos-fonte das carrier boards Jetson da SEEED podem ser baixados em Linux_for_Tegra
Entrar no modo Force Recovery
Antes de podermos prosseguir para as etapas de instalação, precisamos garantir que a placa esteja em modo force recovery.
Passo a passo
Passo 1. Conecte um cabo de transmissão de dados USB Tipo‑C entre a porta USB2.0 DEVICE e o PC host com Ubuntu.
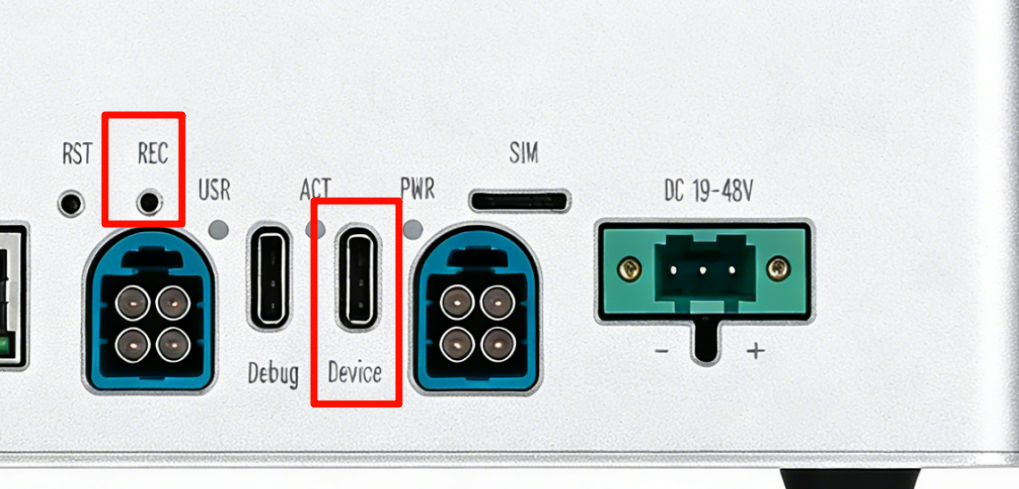
Passo 2. Use um pino e insira no orifício RECOVERY para pressionar o botão de recuperação e, enquanto o mantém pressionado.
Passo 3. Conecte a fonte de alimentação.
Passo 4. Solte o botão de recuperação.
Passo 5. No PC host com Linux, abra uma janela do Terminal e digite o comando lsusb. Se o conteúdo retornado tiver uma das seguintes saídas, de acordo com o Jetson SoM que você usa, então a placa está em modo force recovery.
- Para AGX Orin 32GB: 0955:7223 NVidia Corp
- Para AGX Orin 64GB: 0955:7023 NVidia Corp
A imagem abaixo é para o AGX Orin 32GB:

Gravar no Jetson
Passo 1: Extraia o arquivo de imagem baixado:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-robo-agx-orin-32g-j501-6.2.1-36.4.4-2026-02-11.tar.gz
Passo 2: Execute o seguinte comando para gravar o sistema JetPack no SSD NVMe:
cd mfi_xxxx
# For example: cd mfi_recomputer-robo-agx-orin-j501x
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
Você verá a seguinte saída se o processo de gravação for bem‑sucedido

O comando de gravação pode levar de 2 a 10 minutos.
Passo 3: Conecte o Robotics J501 a um monitor usando o adaptador PD para HDMI para conectar a um monitor que suporte entrada HDMI, ou conecte diretamente a um monitor que suporte entrada PD usando o cabo PD, e finalize a configuração inicial:

Conclua a Configuração do Sistema de acordo com suas necessidades.
🔌 Uso das Interfaces
A seguir serão apresentadas as várias interfaces da placa Robotics J501 e como usá‑las.
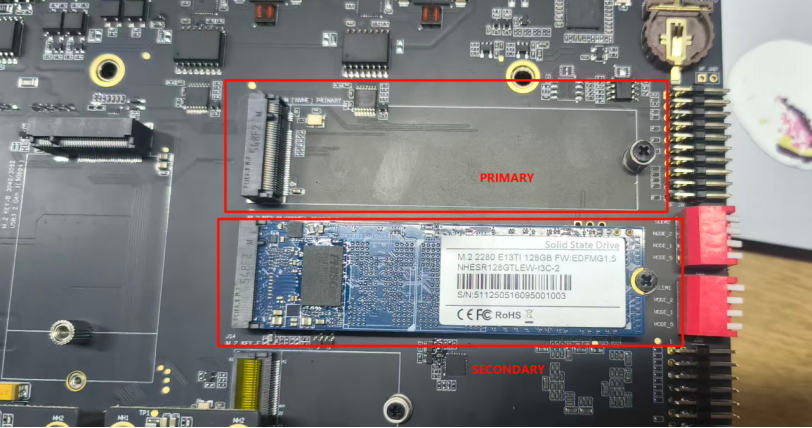
M.2 Key M
A J501 inclui dois slots M.2 Key M que suportam SSDs NVMe PCIe Gen4x4 para expansão de armazenamento em alta velocidade.
SSDs compatíveis são os seguintes
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
Conexão de Hardware
Instruções de Uso
Abra o terminal no dispositivo Jetson e insira o seguinte comando para testar a velocidade de leitura e gravação do SSD.
Passo 1. Crie o diretório e o arquivo de teste:
mkdir ssd
touch ~/ssd/test
Passo 2. Testar o desempenho de gravação:
dd if=/dev/zero of=/home/$USER/ssd/test bs=1024M count=5 conv=fdatasync

Passo 3. Verificar informações do SSD:
nvme list

Execute o comando sudo rm /home/$USER/ssd/test para excluir os arquivos de cache após a conclusão do teste.
M.2 Key E (WiFi/BT)
O slot M.2 Key E suporta módulos Wi‑Fi 6 e Bluetooth 5.x para conectividade sem fio.
Conexão de Hardware
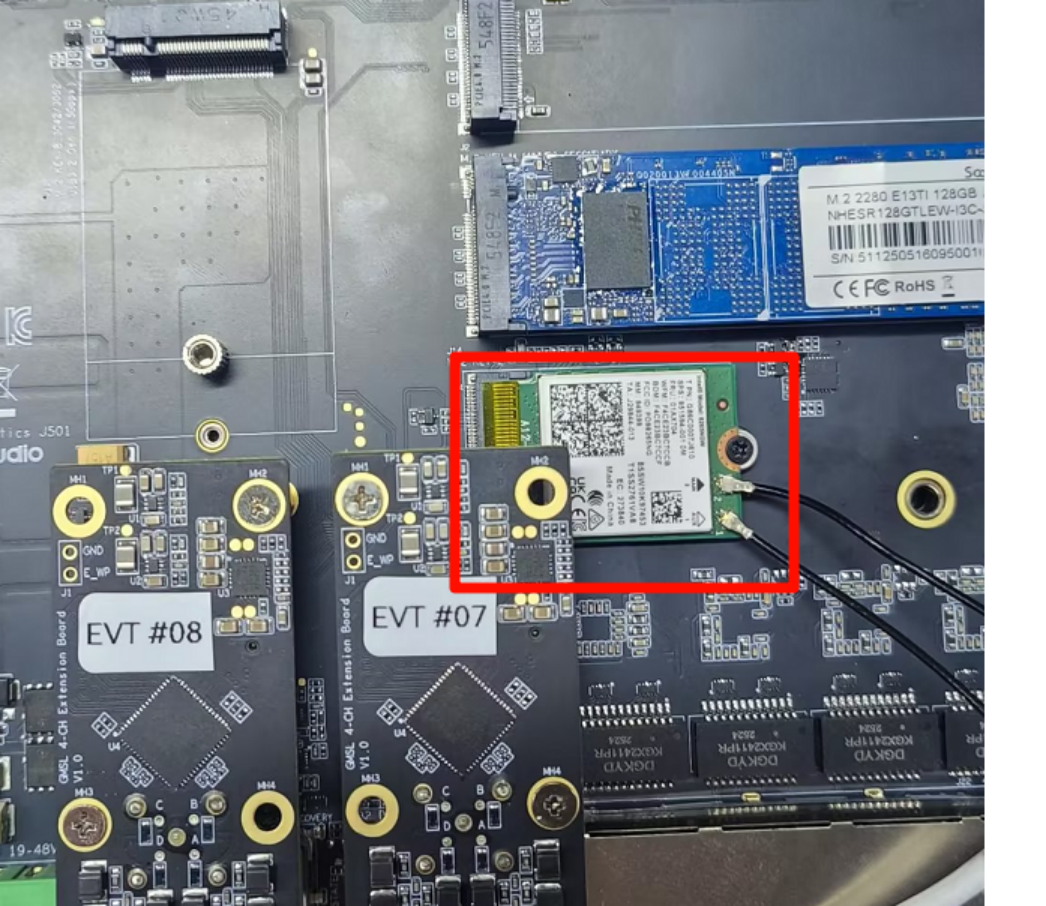
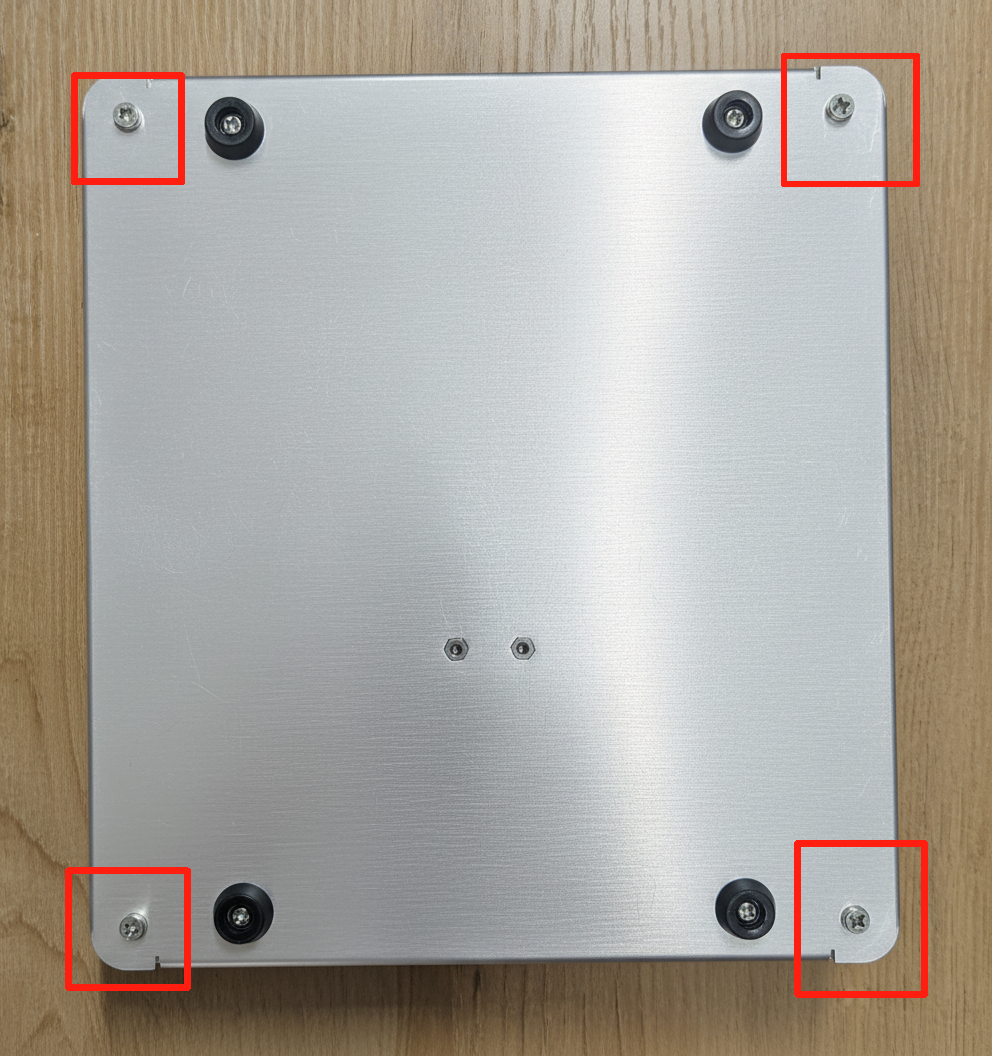
Nota: Antes de usar a interface, você deve remover os parafusos do gabinete e instalar o módulo correspondente, conforme mostrado na figura abaixo.
Instruções de Uso
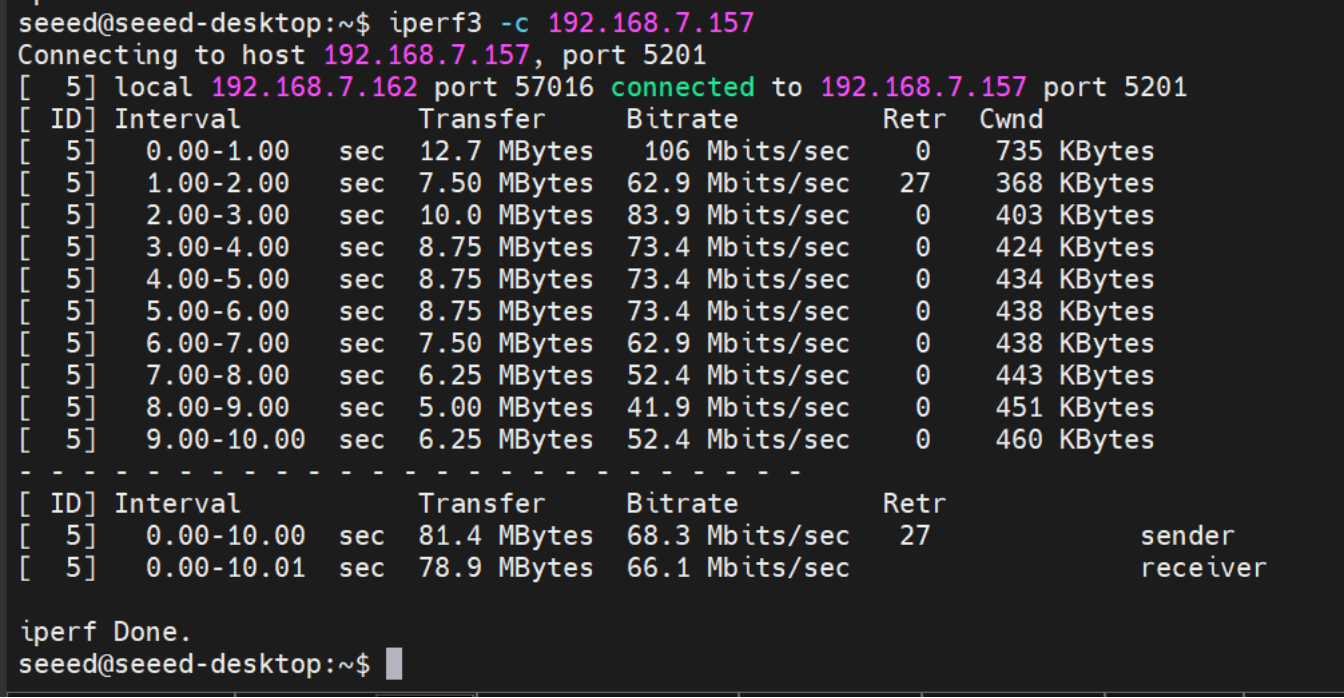
Teste de desempenho: Para testar o desempenho do Wi‑Fi, use o seguinte comando (substitua o endereço IP pelo do seu servidor de teste):
# On server: iperf3 -s
# On client:
iperf3 -c 192.168.7.157
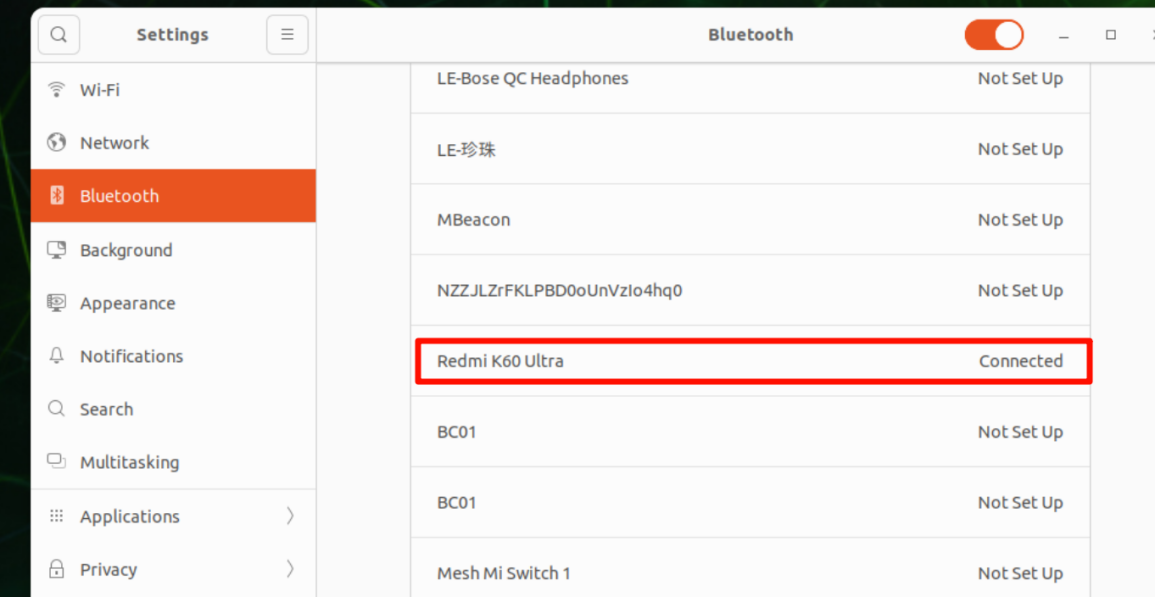
A funcionalidade Bluetooth está disponível através do slot M.2 Key E. Teste de Bluetooth:
M.2 Key B (Módulo 4G/5G)
O slot M.2 Key B suporta módulos celulares 4G/5G com suporte a Nano SIM.
Conexão de Hardware
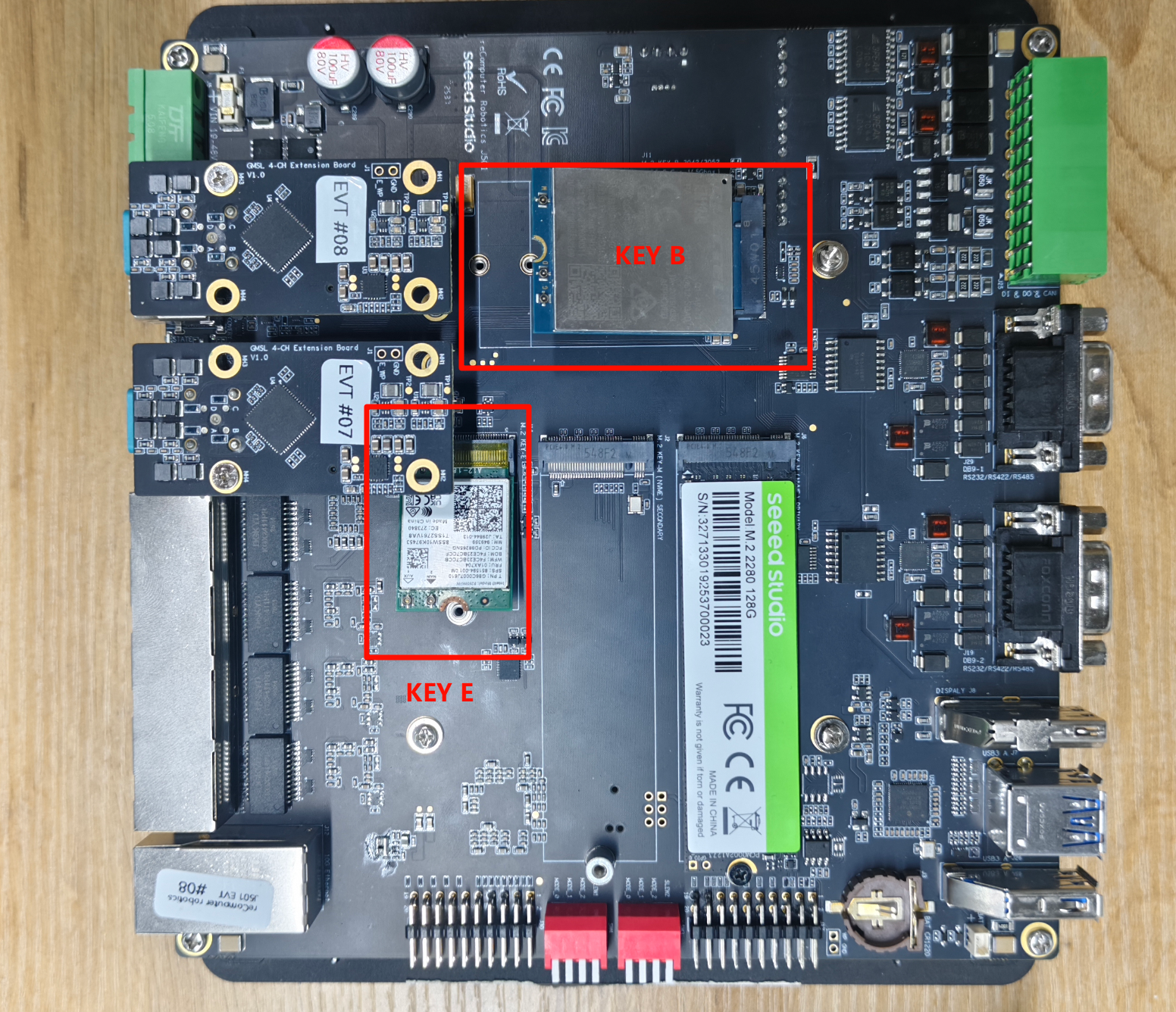
Nota: Antes de usar a interface, você deve remover os parafusos do gabinete e instalar o módulo correspondente, conforme mostrado na figura abaixo.
Instruções de Uso
Passo 1. Verificar reconhecimento de hardware
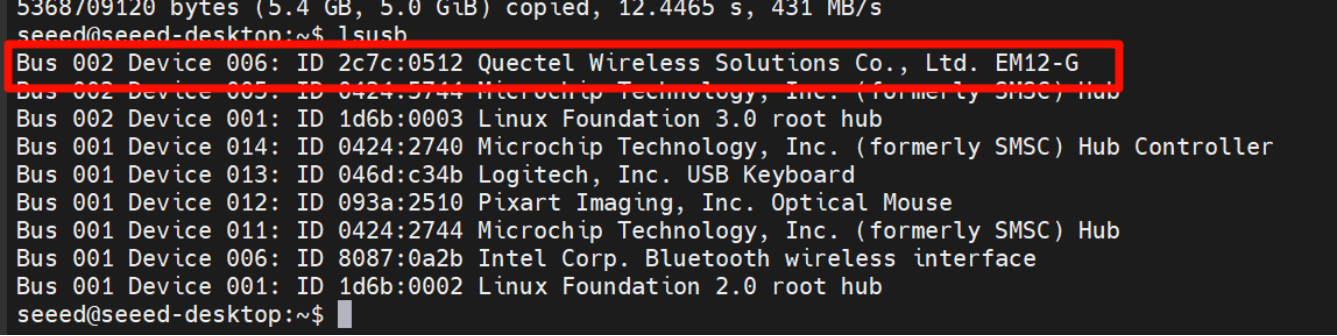
lsusb
Este comando exibe uma lista de todos os dispositivos USB conectados ao sistema, juntamente com seu fabricante (ID), tipo e outras informações. Por exemplo, a saída pode mostrar um dispositivo da Quectel Wireless Solutions Co., Ltd. EM12‑G, indicando que o módulo 5G está presente.
Passo 2. Confirmar o carregamento do driver É essencial garantir que o driver option, que é necessário para o módulo 5G, esteja carregado. Podemos usar o comando lsmod para verificar.
lsmod | grep option
Se o driver option for carregado com sucesso, informações relevantes sobre o driver serão exibidas na saída.

Passo 3. Configurar o ModemManager O ModemManager é uma ferramenta para gerenciar dispositivos modem, e precisa ser instalado e reiniciado.
sudo apt install modemmanager
sudo systemctl restart ModemManager
O comando apt install é usado para instalar o pacote ModemManager, enquanto o systemctl restart reinicia o serviço ModemManager para garantir que as novas configurações entrem em vigor.
Passo 4. Verificar a identificação do módulo Podemos usar o comando mmcli -L para verificar se o ModemManager consegue identificar corretamente o módulo 5G.
mmcli -L
Se o módulo 5G for reconhecido, será exibida uma saída semelhante a /org/freedesktop/ModemManager1/Modem/0, indicando o caminho para o dispositivo de modem detectado.

Passo 5. Definir o APN O APN (Access Point Name) é crucial para conectar um dispositivo móvel à rede. Usaremos o comando nmcli para criar um perfil de bearer. Tomando a China Mobile como exemplo, podemos criar um arquivo de configuração com os seguintes comandos:
sudo nmcli con add type gsm ifname "*" apn "CMNET" ipv4.method auto
Este comando adiciona uma nova conexão do tipo GSM (Global System for Mobile Communications), especificando o APN como "CMNET" e usando configuração IPv4 automática.
Passo 6. Ativar a conexão Depois de criar o perfil de bearer, precisamos ativar a conexão.
sudo nmcli con up "gsm"
Este comando ativa a conexão GSM e, se bem‑sucedido, uma mensagem de confirmação será exibida.

Passo 7. Re‑verificar a identificação do módulo Execute novamente o comando mmcli -L para garantir que o módulo continue sendo reconhecido após a configuração do APN.
mmcli -L
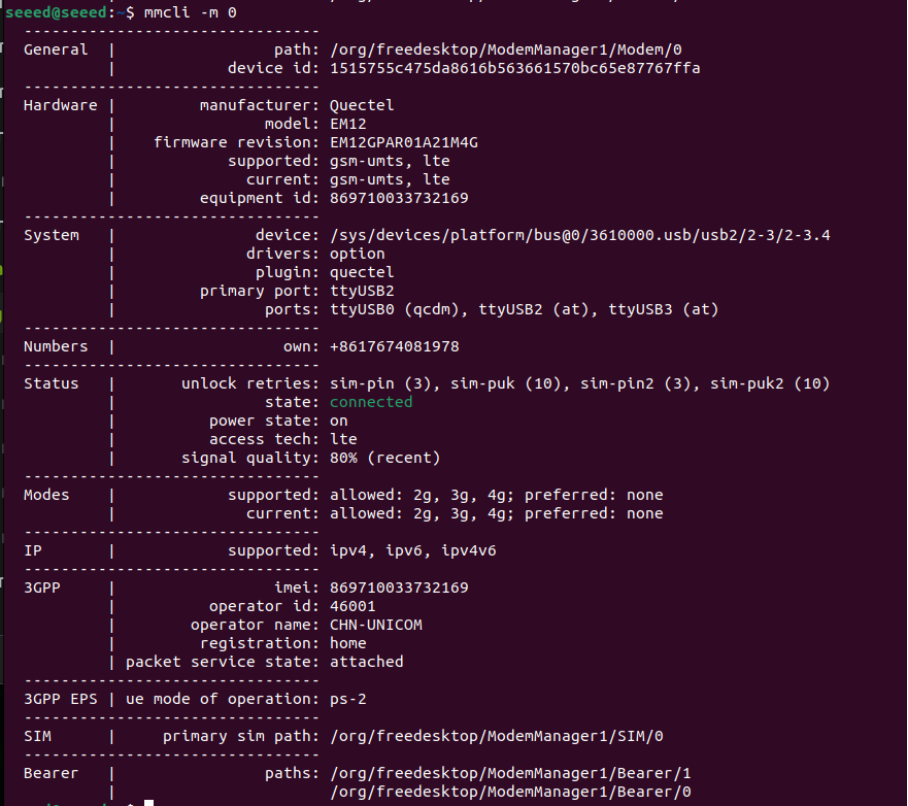
Passo 8. Verificar o status do módulo Por fim, podemos usar o comando mmcli -m 0 para ver informações detalhadas sobre o módulo, como alocação de IP, operadora e status da conexão de rede.
mmcli -m 0
Este comando fornece detalhes abrangentes sobre o módulo 5G, incluindo seu fabricante, modelo, tecnologias de rede suportadas e atuais, status do dispositivo e operadoras de rede conectadas.
Ethernet
O Robotics J501 fornece 1x 10GbE (nativo) e 4x 1GbE (via switch PCIe) portas RJ45. A porta 10GbE possui PHY TI TQSPH‑10G, suportando cinco velocidades: 10/5/2.5/1/0.1 GbE. As portas 1GbE suportam velocidades de 10/100/1000M.
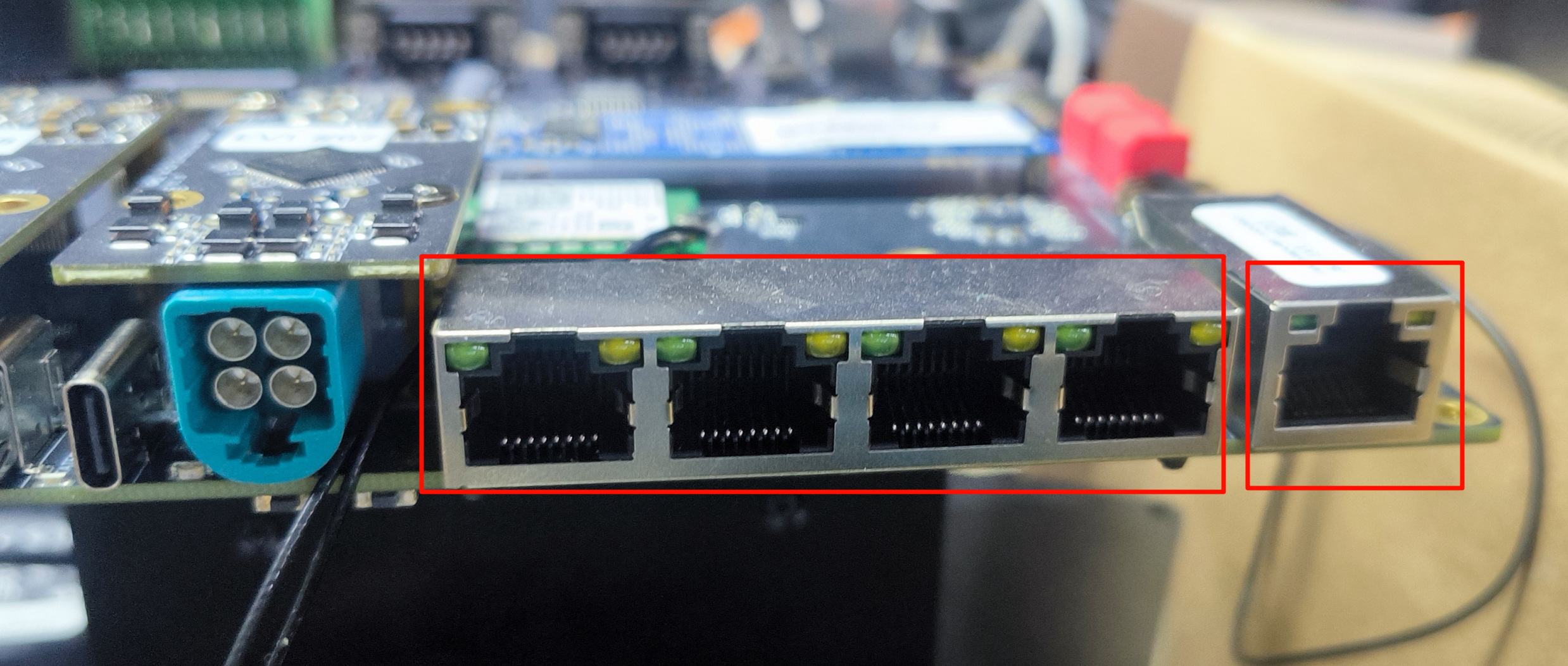
Indicadores LED por porta:
- LED verde: ON para link de 10G/5G/2.5G/1000M
- LED Amarelo: Pisca para atividade de rede
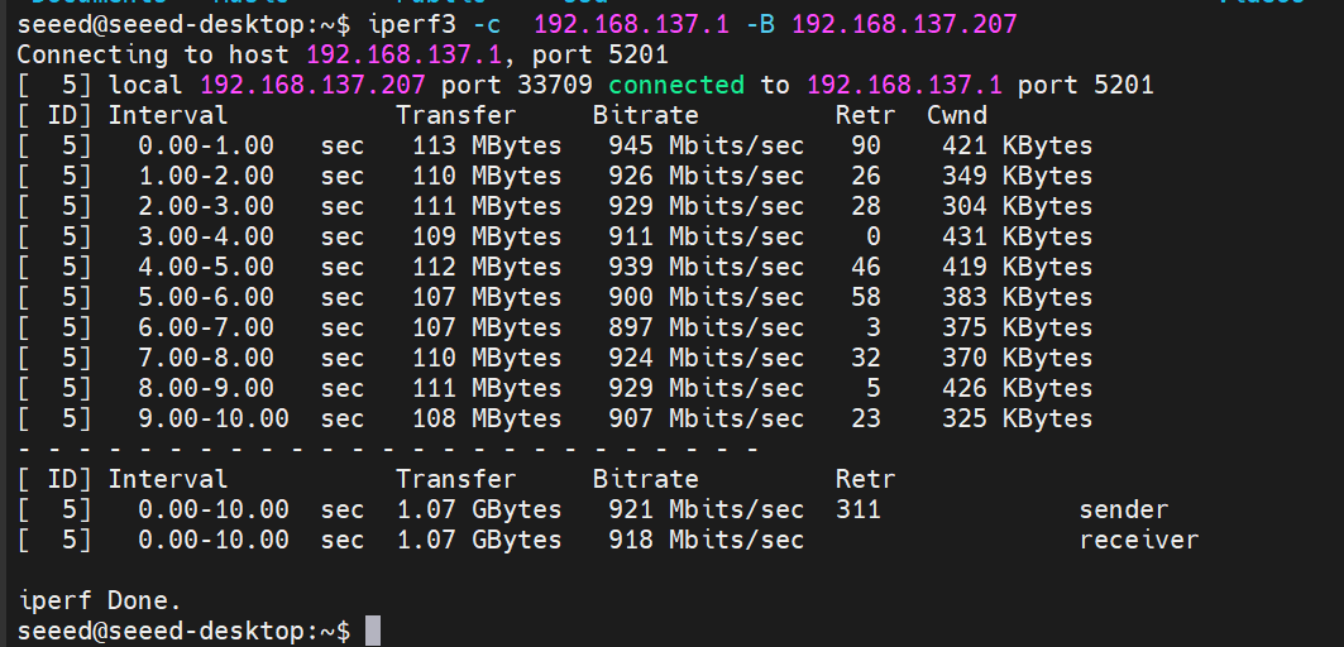
Para testar a velocidade da porta Ethernet, use iperf3 da seguinte forma:
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> é o endereço IP do servidor iperf3. O cliente se conectará a este servidor para realizar um teste de largura de banda.
<bind_ip> vincula o endereço IP local especificado como a origem do tráfego de teste.
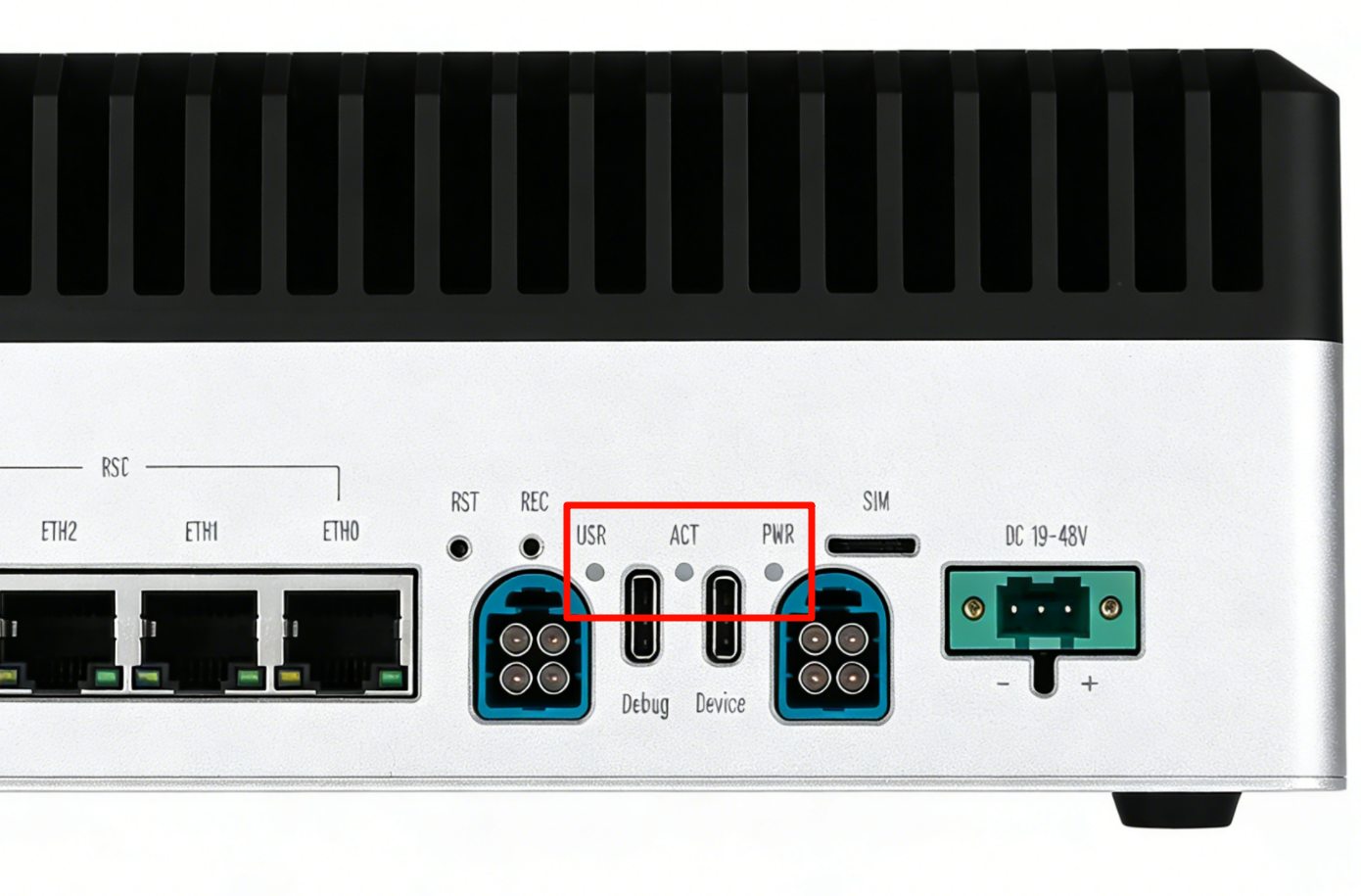
LED
O J501 possui vários LEDs de status:
- PWR LED: Status de energia (verde)
- ACT LED: Atividade do sistema (amarelo)
- USR LED: Controle via GPIO
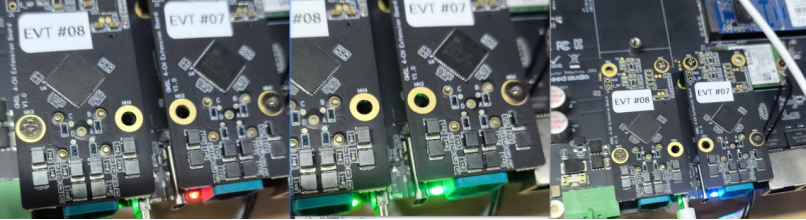
Instruções de Uso
O seguinte demonstra como controlar os LEDs USER para serem verde, vermelho ou azul.
#change to red
echo 1 | sudo tee /sys/class/leds/on-board:red/brightness
echo 0 | sudo tee /sys/class/leds/on-board:red/brightness
#change to green
echo 1 | sudo tee /sys/class/leds/on-board:green/brightness
echo 0 | sudo tee /sys/class/leds/on-board:green/brightness
#change to blue
echo 1 | sudo tee /sys/class/leds/on-board:blue/brightness
echo 0 | sudo tee /sys/class/leds/on-board:blue/brightness
O efeito de controle do LED é mostrado na figura abaixo:
USB
O Robotics J501 fornece 4x portas USB 3.2 Tipo-A (através de um hub interno USB 3.1 Gen1, suportando taxas de dados de até 5Gbps para conectar periféricos de alta velocidade, dispositivos de armazenamento ou câmeras) e 1x porta USB 2.0 Tipo-C de depuração (que funciona como um console serial para acessar logs do sistema, depurar problemas de boot e realizar atualizações de firmware).
Teste de Velocidade USB-A
Crie um script para testar a velocidade do dispositivo USB:
vim test_usb.sh
Cole o seguinte conteúdo:
test_usb.sh
cat <<'EOF' | sudo tee test_usb.sh >/dev/null
#!/bin/bash
set -e
MOUNT_POINT="$1"
TEST_FILE="$MOUNT_POINT/test_usb_speed.bin"
if [ -z "$MOUNT_POINT" ]; then
echo "Usage: $0 <mount_point>"
echo "Example: $0 /media/seeed/USB"
exit 1
fi
if [ ! -d "$MOUNT_POINT" ]; then
echo "Error: $MOUNT_POINT is not a directory"
exit 1
fi
echo "Write test..."
dd if=/dev/zero of="$TEST_FILE" bs=1M count=2048 conv=fdatasync status=progress
echo
echo "Drop caches..."
sync
echo 3 | sudo tee /proc/sys/vm/drop_caches >/dev/null
echo "Read test..."
dd if="$TEST_FILE" of=/dev/null bs=1M count=2048 status=progress
echo
echo "Cleaning up..."
rm -f "$TEST_FILE"
EOF
Torne o script executável e teste:
sudo chmod +x test_usb.sh
./test_usb.sh /mnt # If your USB drive is mounted at /mnt
# Or
./test_usb.sh /media/usb # If your USB drive is mounted at /media/usb
# Or
./test_usb.sh /path/to/your/usb/mount_point

Confirme primeiro o ponto de montagem real do seu dispositivo USB usando o comando df -h ou lsblk!
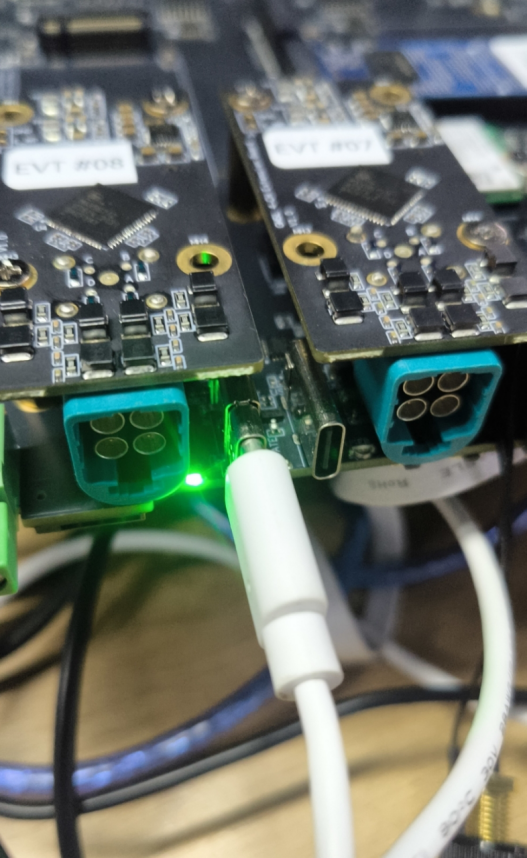
Porta USB 2.0 Tipo-C
Usando esta porta serial, através do cabo de dados USB-C, você pode monitorar as informações de depuração de entrada e saída no lado do PC.
Passo 1. Abra a ferramenta de porta serial (aqui usamos a ferramenta MobaXterm como exemplo) e crie uma nova sessão.

Passo 2. Selecione a ferramenta Serial.

Passo 3. Selecione a porta serial correspondente, defina a taxa de baud para 115200 e clique em "OK".
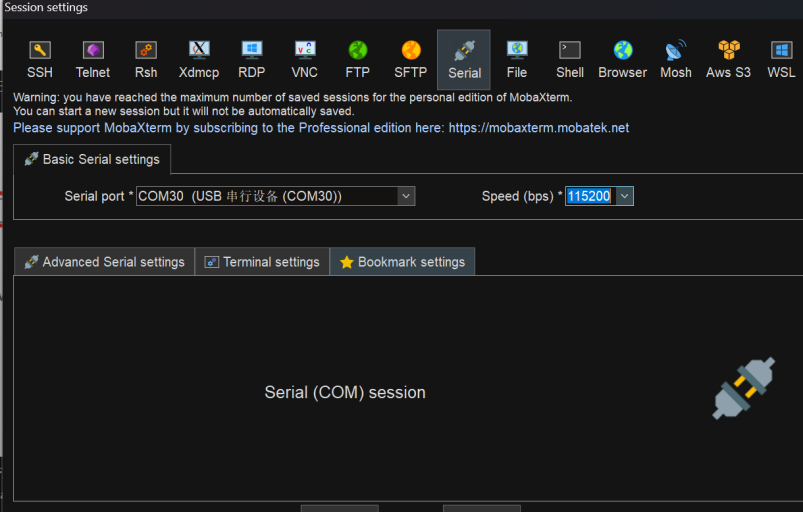
Passo 4. Faça login no seu reComputer Super com o nome de usuário e a senha.
Ventoinha
O Robotics J501 fornece dois conectores de ventoinha PWM de 4 pinos projetados para resfriar tanto o módulo Jetson quanto os componentes da placa carrier:
- Ventoinha 12V: conector de 2,54 mm, máx. 1,5A, adequado para resfriamento de alto desempenho
- Ventoinha 5V: conector JST de 1,25 mm, máx. 1,5A, ideal para resfriamento silencioso de baixa potência
O controle PWM permite ajuste dinâmico e preciso da velocidade com base na temperatura do sistema, possibilitando um resfriamento eficiente enquanto minimiza o ruído e o consumo de energia.
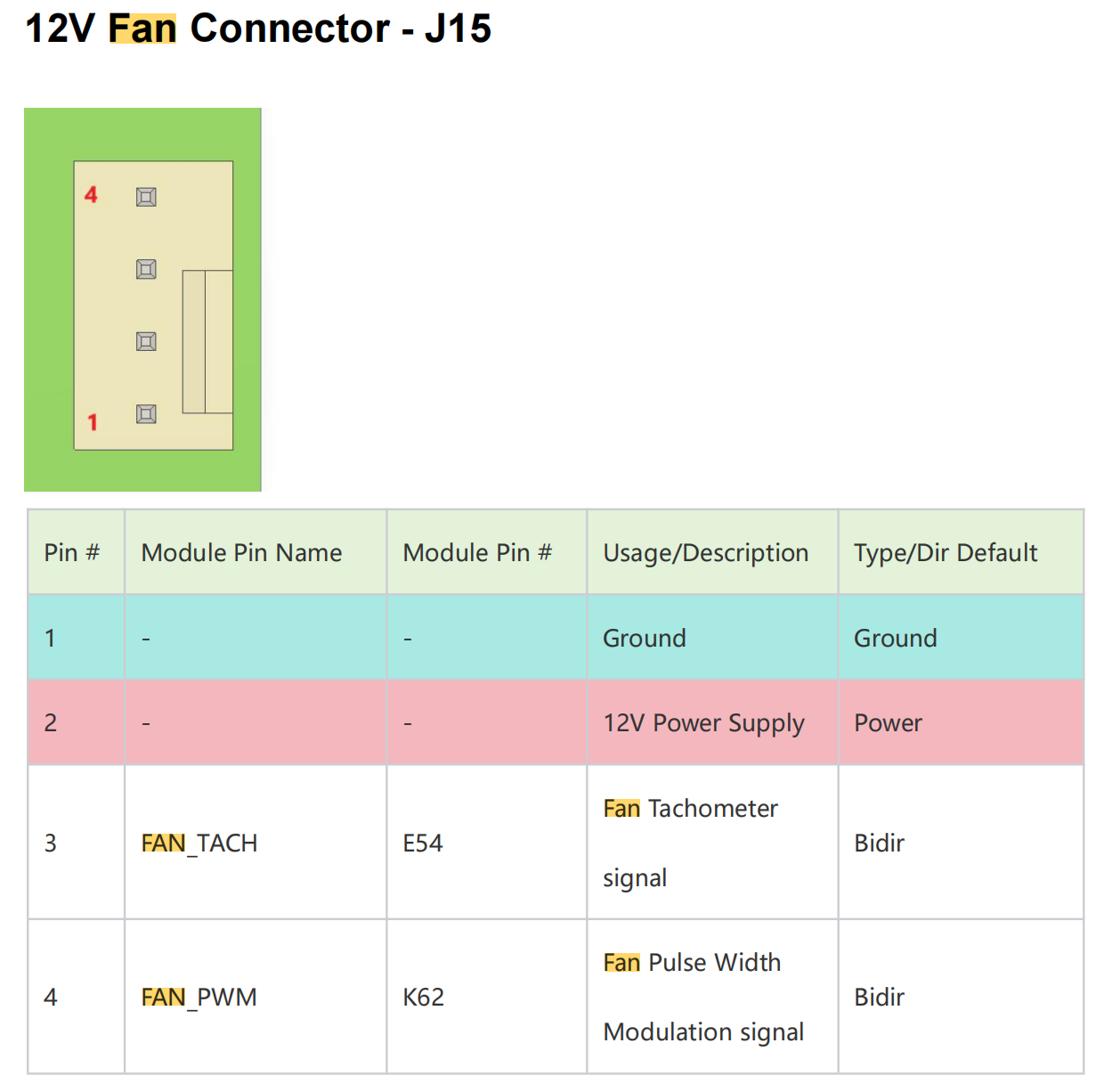
Pinagem da Ventoinha 12V:
O conector da ventoinha de 12V (2,54 mm) possui a seguinte pinagem:
Instruções de Uso
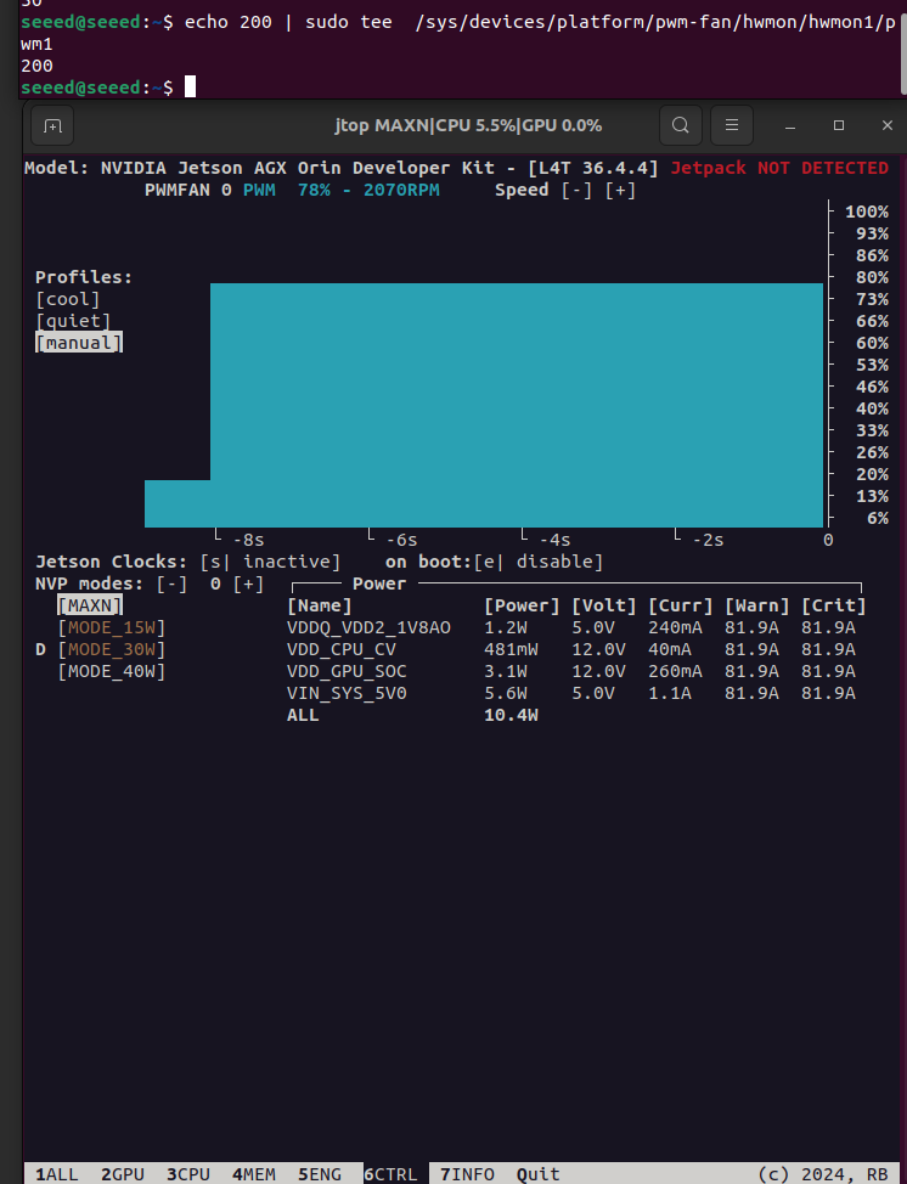
Controle PWM Manual:
# Set fan speed (0-255)
sudo -i
echo 200 > /sys/bus/platform/devices/pwm-fan/hwmon/hwmon1/pwm1
A política térmica padrão é pré-configurada em /etc/nvpmodel.conf. Para perfis personalizados, consulte o NVIDIA Jetson Linux Developer Guide.
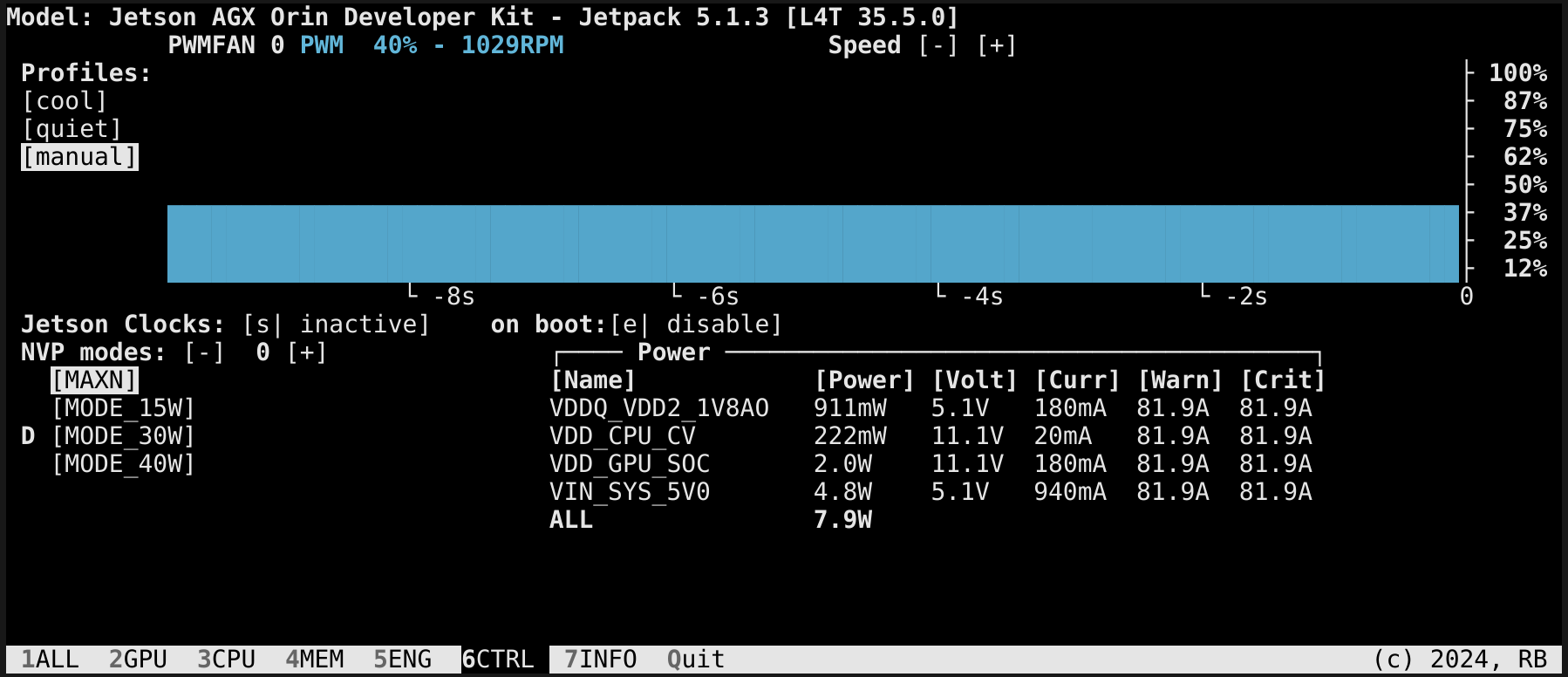
Além disso, podemos definir manualmente a velocidade da ventoinha usando a ferramenta jtop.
Você pode inserir o seguinte comando no terminal para instalar o jtop.
sudo apt update
sudo apt install python3-pip -y
sudo pip3 install jetson-stats
Em seguida, reinicie seu reComputer Mini:
sudo reboot
Após instalar o jtop, você pode iniciá-lo no terminal:
jtop
CAN
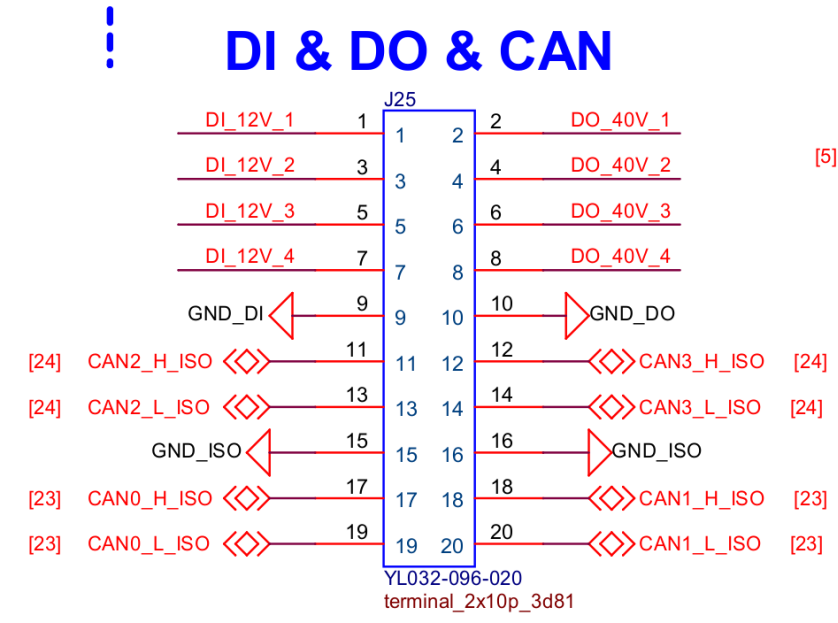
O reComputer Robotics J501 está equipado com 4 interfaces CAN independentes (CAN 0, CAN 1, CAN 2, CAN 3), que compartilham o conector J25 2x10P com interfaces DI/DO. Essas interfaces suportam tanto os protocolos de comunicação Classic CAN quanto CAN FD, com alta capacidade de anti-interferência e transmissão de dados em tempo real, tornando-as adequadas para cenários de controle industrial, como eletrônica automotiva, automação industrial e robótica.
Instruções de Uso
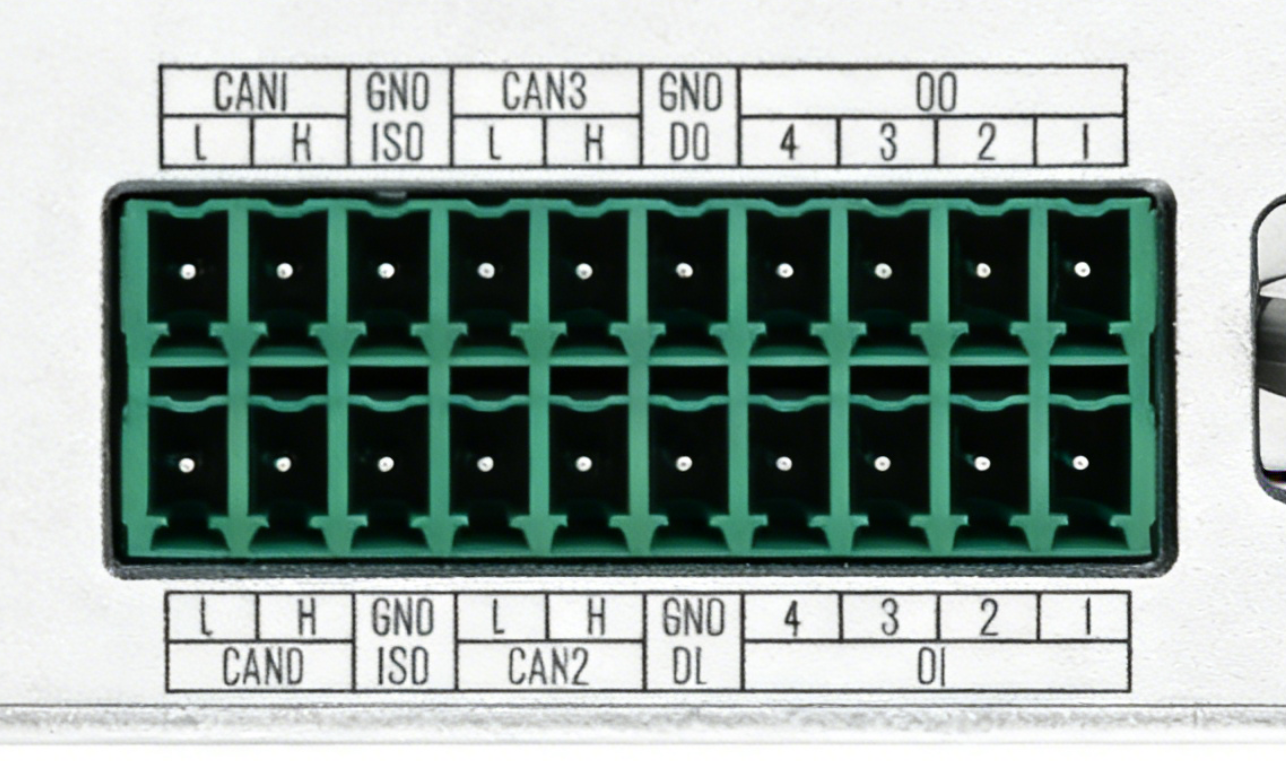
Este é o diagrama esquemático da interface CAN.
Comunicação CAN
Esta seção demonstra a conexão CAN0↔CAN1 e CAN2↔CAN3 no Jetson e mostra como enviar e receber dados entre esses pares, tanto no modo Classic CAN quanto no modo CAN‑FD.
| Nome do Canal | Tipo de Interface | Nome do Pino | Chip GPIO | Número GPIO | Controle do Resistor de Terminação |
|---|---|---|---|---|---|
| CAN0 | Nativo | PAA.04 | gpiochip1 | 4 | gpiochip1 line4 (PAA.04) |
| CAN1 | Nativo | PAA.07 | gpiochip1 | 7 | gpiochip1 line7 (PAA.07) |
| CAN2 | SPI-to-CAN | - | gpiochip2 | 10 | gpiochip2 line10 |
| CAN3 | SPI-to-CAN | - | gpiochip2 | 12 | gpiochip2 line12 |
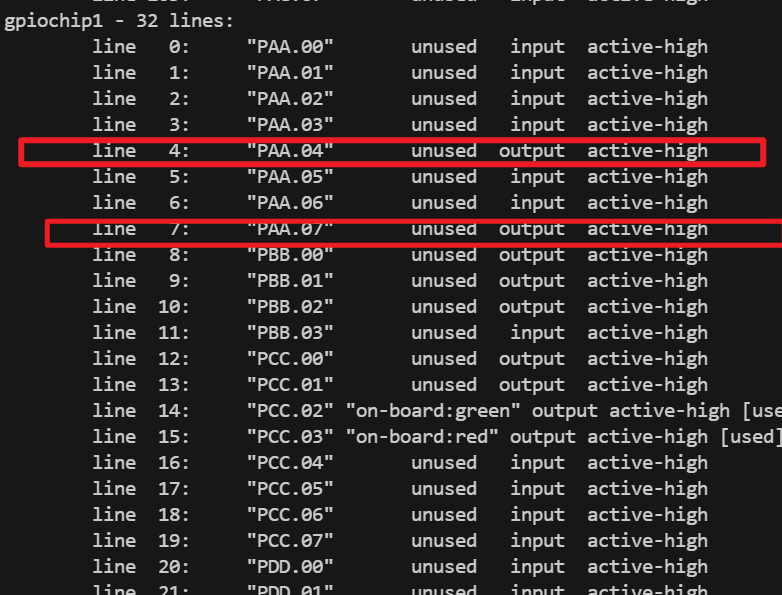
Os resistores de terminação para CAN0 e CAN1 podem ser controlados através de dois pinos: PAA.04, localizado em gpiochip1 line4, e PAA.07, localizado em gpiochip1 line7.
O controle do resistor de terminação segue estas regras:
When `PAA.04 = 1`, the 120 Ω termination resistor of CAN0 is **disconnected**;
when `PAA.04 = 0`, the 120 Ω termination resistor of CAN0 is **connected**.
When `PAA.07 = 1`, the 120 Ω termination resistor of CAN1 is **disconnected**;
when `PAA.07 = 0`, the 120 Ω termination resistor of CAN1 is **connected**.
Digite o seguinte comando para visualizar os pinos no gpiochip 1:
gpioinfo gpiochip1
Consulte os seguintes comandos para definir PAA.04 e PAA.07 para 0:
sudo gpioset --mode=wait gpiochip1 4=0
sudo gpioset --mode=wait gpiochip1 7=0
Consulte os seguintes comandos para definir PAA.04 e PAA.07 para 1:
sudo gpioset --mode=wait gpiochip1 4=1
sudo gpioset --mode=wait gpiochip1 7=1
Modo Classic CAN
O script a seguir implementa o teste de comunicação em loopback entre CAN0/CAN1 e CAN2/CAN3, incluindo habilitar o resistor terminal, configurar a taxa de bits e a transmissão bidirecional de dados.
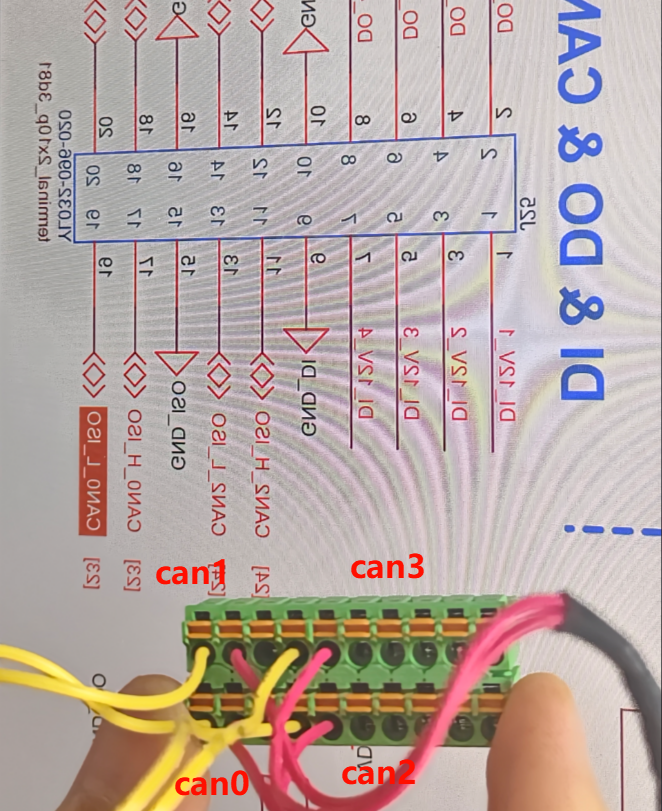
O diagrama de fiação é mostrado abaixo:
| De | Para |
|---|---|
| CAN0_H | CAN1_H |
| CAN0_L | CAN1_L |
| CAN2_H | CAN3_H |
| CAN2_L | CAN3_L |
O diagrama de fiação é mostrado abaixo:

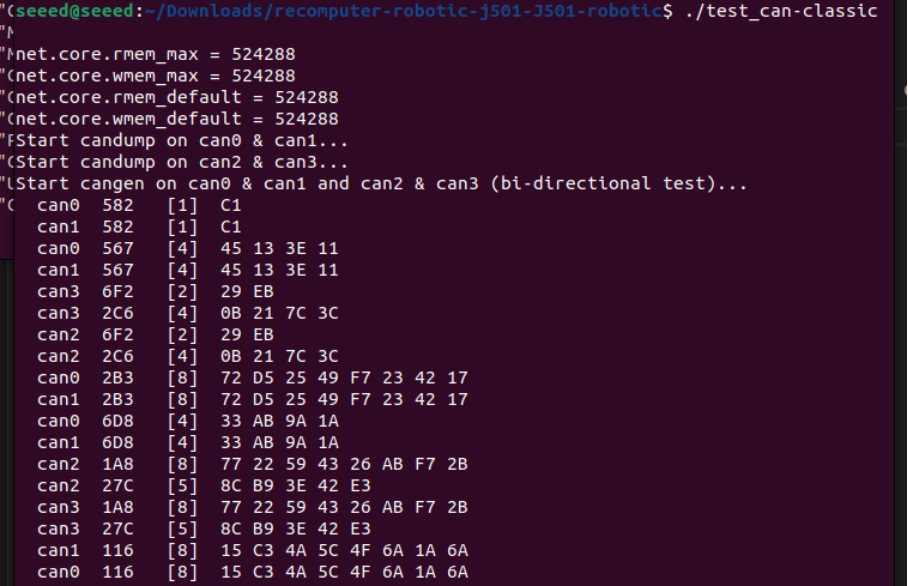
Crie test_can.sh para testar a transmissão e recepção de dados entre CAN0↔CAN1 e CAN2↔CAN3 no modo padrão:
touch test_can.sh
sudo chmod +x test_can.sh
sudo ./test_can.sh
O código do script para test_can.sh é o seguinte:
test_can.sh
#!/bin/bash
set -e
PW="000000"
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
# Set socket buffer sizes
echo "$PW" | sudo -S sysctl -w net.core.rmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.rmem_default=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_default=524288
# Set bitrate, 1 Mbps
BITRATE=1000000
echo "$PW" | sudo -S ip link set can0 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can1 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can0 up
echo "$PW" | sudo -S ip link set can1 up
echo "$PW" | sudo -S ip link set can2 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can3 type can bitrate ${BITRATE}
echo "$PW" | sudo -S ip link set can2 up
echo "$PW" | sudo -S ip link set can3 up
sleep 1
# Enable termination resistors
sudo pkill -f gpioset || true
gpioset --mode=time --sec=200000 gpiochip2 8=0 & # enable CAN1 120R
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 9=0 & # enable CAN0 120R
GPIO2_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 12=0 & # enable CAN3 120R
GPIO3_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 10=0 & # enable CAN2 120R
GPIO4_PID=$!
echo "Start candump on can0 & can1..."
candump can0 &
DUMP0_PID=$!
candump can1 &
DUMP1_PID=$!
echo "Start candump on can2 & can3..."
candump can2 &
DUMP2_PID=$!
candump can3 &
DUMP3_PID=$!
echo "Start cangen on can0 & can1 and can2 & can3 (bi-directional test)..."
# -g 10 sends one frame every 10 ms; adjust as needed
cangen can0 -g 10 &
GEN0_PID=$!
cangen can1 -g 10 &
GEN1_PID=$!
cangen can2 -g 10 &
GEN2_PID=$!
cangen can3 -g 10 &
GEN3_PID=$!
# Cleanup background processes on Ctrl+C
cleanup() {
echo
echo "Stopping CAN test..."
kill $GEN0_PID $GEN1_PID $DUMP0_PID $DUMP1_PID $GPIO1_PID $GPIO2_PID 2>/dev/null || true
kill $GEN2_PID $GEN3_PID $DUMP2_PID $DUMP3_PID $GPIO3_PID $GPIO4_PID 2>/dev/null || true
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
echo "Done."
}
trap cleanup INT TERM
# Wait for child processes (candump runs until you Ctrl+C)
wait
No script de teste CAN, substitua PW pela sua própria senha do Jetson.
A transmissão e recepção de dados entre CAN0 e CAN1 serão concluídas:
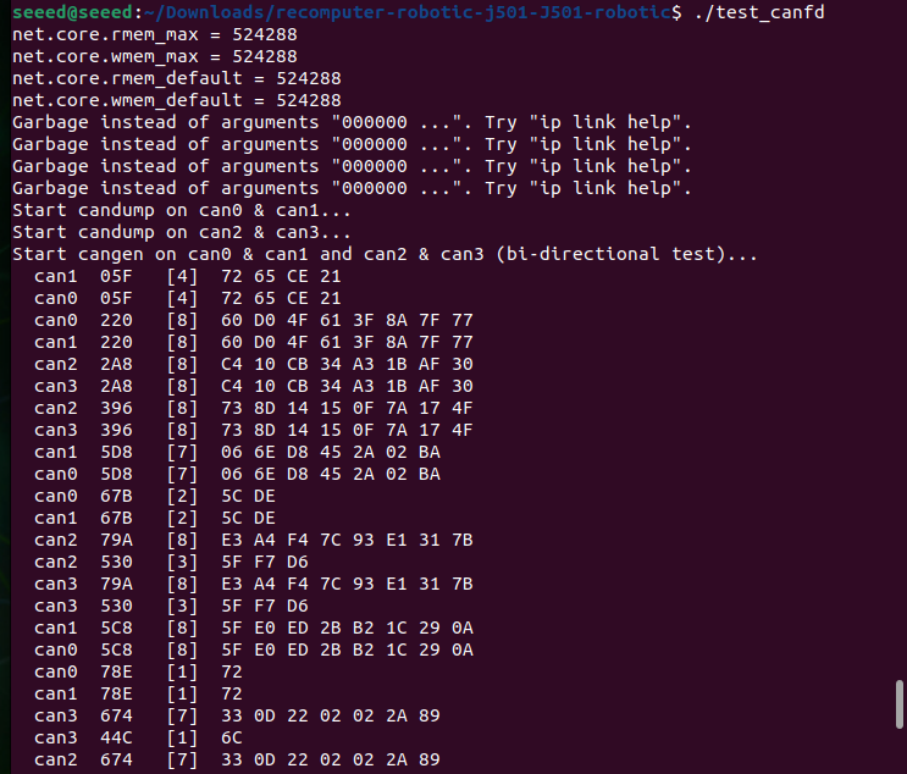
Modo CAN-FD
O CAN FD oferece suporte a taxas de transmissão de dados mais altas e comprimentos de quadro de dados maiores. O script a seguir implementa o teste de loopback CAN FD.
Crie test_canfd.sh para testar a transmissão e recepção de dados entre CAN0↔CAN1 e CAN2↔CAN3 no modo CAN-FD:
touch test_canfd.sh
sudo chmod +x test_canfd.sh
sudo ./test_canfd.sh
O código do script para test_canfd.sh é o seguinte:
test_canfd.sh
#!/bin/bash
set -e
PW="000000"
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
# Set socket buffers
echo "$PW" | sudo -S sysctl -w net.core.rmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_max=524288
echo "$PW" | sudo -S sysctl -w net.core.rmem_default=524288
echo "$PW" | sudo -S sysctl -w net.core.wmem_default=524288
# ---- CAN-FD parameters ----
BITRATE=500000 # Arbitration (nominal) bitrate
DBITRATE=5000000 # Data phase bitrate (FD fast mode)
# Configure CAN-FD: arbitration bitrate + data bitrate + FD on + error reporting + auto restart
echo "$PW" | sudo -S ip link set can0 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can1 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can2 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can3 type can bitrate $BITRATE dbitrate $DBITRATE fd on berr-reporting on restart-ms 100
echo "$PW" | sudo -S ip link set can0 up
echo "$PW" | sudo -S ip link set can1 up
echo "$PW" | sudo -S ip link set can2 up
echo "$PW" | sudo -S ip link set can3 up
sleep 1
# Enable termination resistors
sudo pkill -f gpioset || true
gpioset --mode=time --sec=200000 gpiochip2 8=0 & # enable CAN1 120R
GPIO1_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 9=0 & # enable CAN0 120R
GPIO2_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 12=0 & # enable CAN3 120R
GPIO3_PID=$!
gpioset --mode=time --sec=200000 gpiochip2 10=0 & # enable CAN2 120R
GPIO4_PID=$!
echo "Start candump on can0 & can1..."
candump can0 &
DUMP0_PID=$!
candump can1 &
DUMP1_PID=$!
echo "Start candump on can2 & can3..."
candump can2 &
DUMP2_PID=$!
candump can3 &
DUMP3_PID=$!
echo "Start cangen on can0 & can1 and can2 & can3 (bi-directional test)..."
# -g 10 sends one frame every 10 ms; adjust as needed
cangen can0 -g 10 &
GEN0_PID=$!
cangen can1 -g 10 &
GEN1_PID=$!
cangen can2 -g 10 &
GEN2_PID=$!
cangen can3 -g 10 &
GEN3_PID=$!
# Cleanup background processes on Ctrl+C
cleanup() {
echo
echo "Stopping CAN-FD test..."
kill $GEN0_PID $GEN1_PID $DUMP0_PID $DUMP1_PID $GPIO1_PID $GPIO2_PID 2>/dev/null || true
kill $GEN2_PID $GEN3_PID $DUMP2_PID $DUMP3_PID $GPIO3_PID $GPIO4_PID 2>/dev/null || true
echo "$PW" | sudo -S ip link set can0 down || true
echo "$PW" | sudo -S ip link set can1 down || true
echo "$PW" | sudo -S ip link set can2 down || true
echo "$PW" | sudo -S ip link set can3 down || true
echo "Done."
}
trap cleanup INT TERM
# Wait for child processes (candump will run until you Ctrl+C)
wait
No script de teste CAN, substitua PW pela sua própria senha do Jetson.
A transmissão e recepção de dados entre CAN0↔CAN1 e CAN2↔CAN3 serão concluídas:
DI/DO
As interfaces DI/DO do reComputer Robotics J501 são integradas no conector J25 2x10P, compartilhando a interface com as interfaces CAN. Elas suportam 4 canais de entrada digital e 4 canais de saída digital, apresentando transmissão de sinal estável e adaptação de tensão em nível industrial, adequadas para conectar sensores digitais, relés e outros dispositivos periféricos.
Conexão de Hardware
Canais de Entrada Digital (DI)
| Nome do Canal | Características de Tensão | Rótulo GPIO | Nome do Pino | Chip GPIO | Número GPIO |
|---|---|---|---|---|---|
| DI_12V_1 | Entrada adaptativa de 12V | DI_1_GPIO17 | PP.04 | gpiochip0 | 96 |
| DI_12V_2 | Entrada adaptativa de 12V | DI_1_GPIO18 | PQ.04 | gpiochip0 | 104 |
| DI_12V_3 | Entrada adaptativa de 12V | DI_1_GPIO19 | PN.02 | gpiochip0 | 86 |
| DI_12V_4 | Entrada adaptativa de 12V | DI_1_GPIO33 | PM.07 | gpiochip0 | 83 |
Canais de Saída Digital (DO)
| Nome do Canal | Características de Tensão | Rótulo GPIO | Nome do Pino | Chip GPIO | Número GPIO | Informação Adicional |
|---|---|---|---|---|---|---|
| DO_40V_1 | Saída open-drain; ~0V (baixo) quando não puxado para alto, 12V (alto) quando puxado para alto | DO_1_GPIO | PAA.04 | gpiochip1 | 4 | Número correspondente: 320 |
| DO_40V_2 | Saída open-drain; ~0V (baixo) quando não puxado para alto, 12V (alto) quando puxado para alto | DO_2_GPIO | PAA.07 | gpiochip1 | 7 | Número correspondente: 323 |
| DO_40V_3 | Saída open-drain; ~0V (baixo) quando não puxado para alto, 12V (alto) quando puxado para alto | DO_3_GPIO | PBB.01 | gpiochip1 | 9 | Número correspondente: 325 |
| DO_40V_4 | Saída open-drain; ~0V (baixo) quando não puxado para alto, 12V (alto) quando puxado para alto | DO_4_GPIO | PBB.00 | gpiochip1 | 8 | Número correspondente: 324 |
As principais definições de pinos para as interfaces DI/DO no conector J25 são as seguintes (a numeração dos pinos corresponde ao conector físico):
| Número do Pino | Rótulo de Função | Descrição |
|---|---|---|
| 1 | DI_12V_1 | Canal de Entrada Digital 12V 1 |
| 3 | DI_12V_2 | Canal de Entrada Digital 12V 2 |
| 5 | DI_12V_3 | Canal de Entrada Digital 12V 3 |
| 7 | DI_12V_4 | Canal de Entrada Digital 12V 4 |
| 9 | GND_DI | Terra para Canais de Entrada Digital |
| 2 | DO_40V_1 | Canal de Saída Digital 40V 1 |
| 4 | DO_40V_2 | Canal de Saída Digital 40V 2 |
| 6 | DO_40V_3 | Canal de Saída Digital 40V 3 |
| 8 | DO_40V_4 | Canal de Saída Digital 40V 4 |
| 10 | GND_DO | Terra para Canais de Saída Digital |
Para o pinout completo (incluindo interfaces CAN), consulte a documentação de hardware do reComputer Robotics J501 para evitar conexões incorretas.
Instruções de Uso
Operação de Saída Digital (DO)
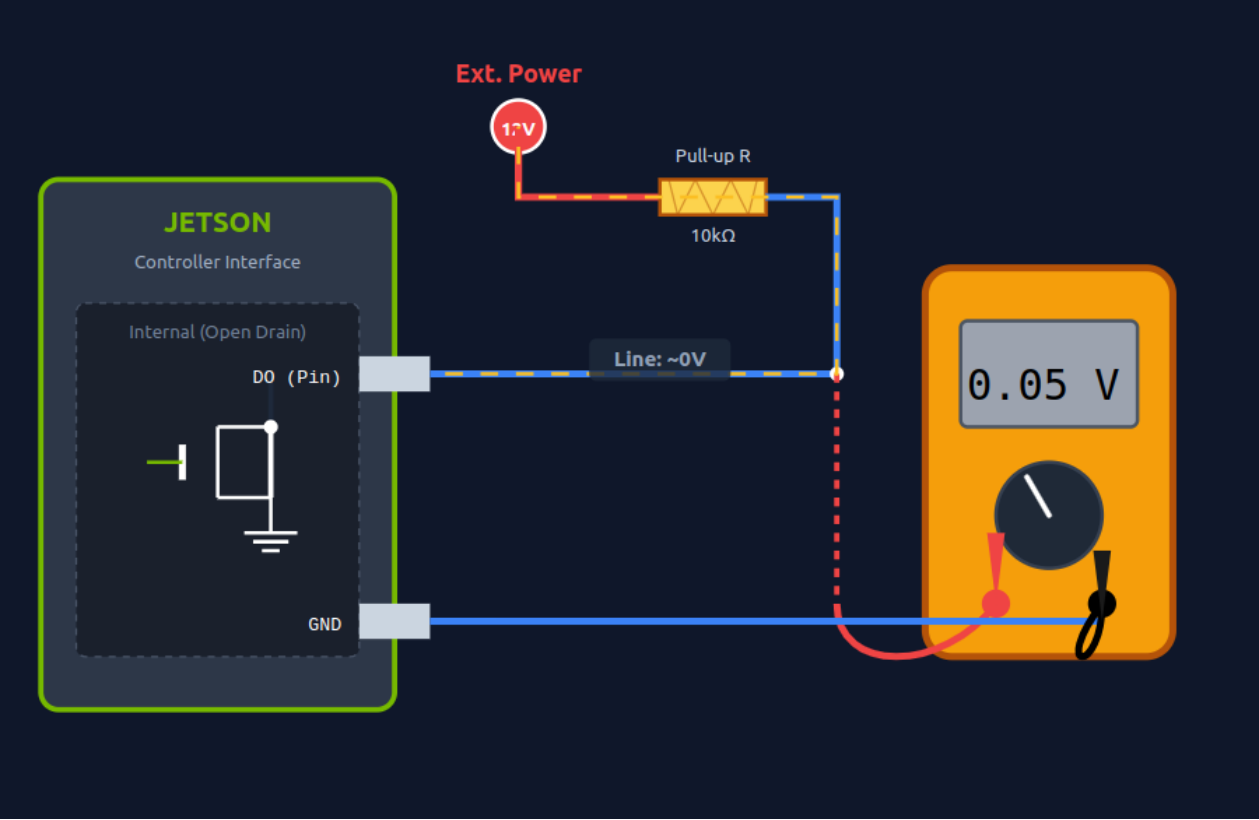
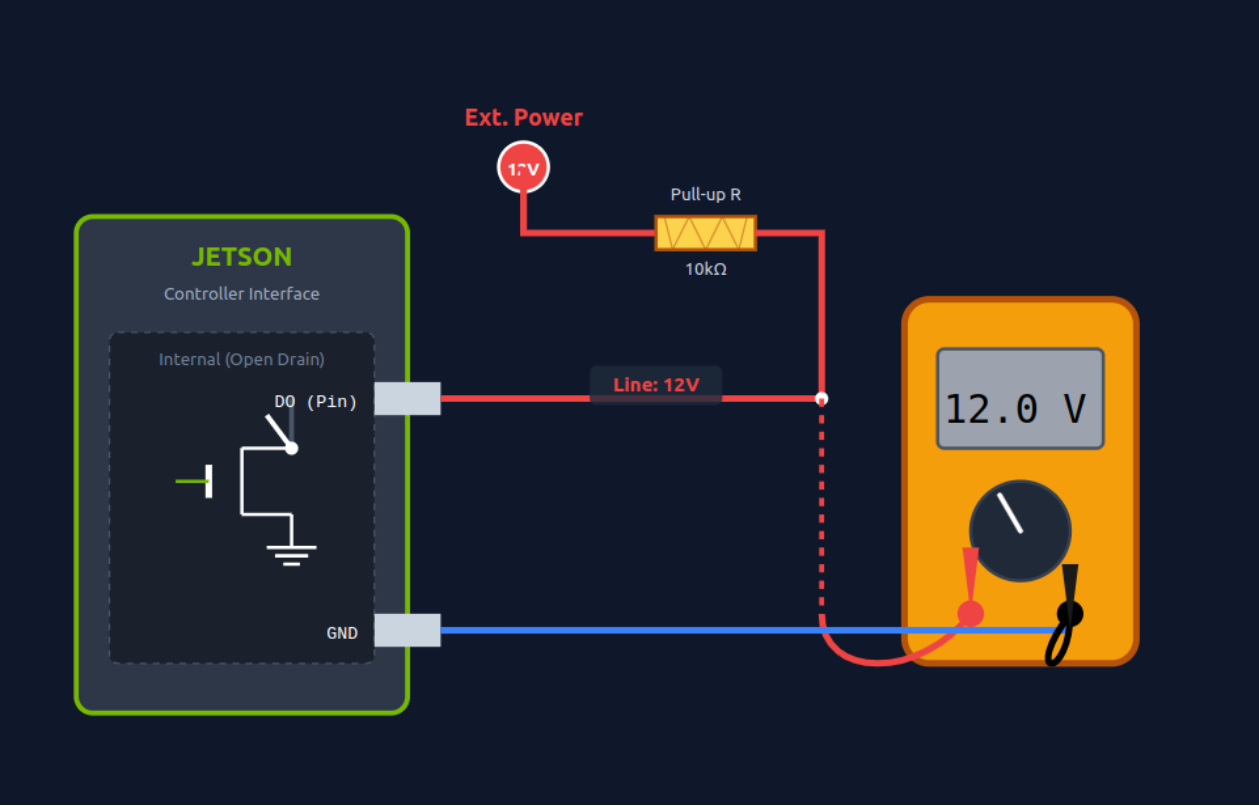
As interfaces DO adotam saída open-drain. Você pode definir o nível de saída (alto/baixo) por meio de comandos para controlar periféricos como relés e LEDs.
Execute o seguinte comando para habilitar o canal DO (saída de 12V, alimentada pelo resistor de pull-up externo e fonte de alimentação de 12V):
# Enable DO_40V_1 (gpiochip1 4)
sudo gpioset --mode=wait 1 4=1
# Enable DO_40V_2 (gpiochip1 7)
sudo gpioset --mode=wait 1 7=1
# Enable DO_40V_3 (gpiochip1 9)
sudo gpioset --mode=wait 1 9=1
# Enable DO_40V_4 (gpiochip1 8)
sudo gpioset --mode=wait 1 8=1
DO antes de puxar para alto:
DO após puxar para alto:
Execute o seguinte comando para desabilitar o canal DO (saída ~0V):
# Disable DO_40V_1 (gpiochip1 4)
sudo gpioset --mode=wait 1 4=0
# Disable DO_40V_2 (gpiochip1 7)
sudo gpioset --mode=wait 1 7=0
# Disable DO_40V_3 (gpiochip1 9)
sudo gpioset --mode=wait 1 9=0
# Disable DO_40V_4 (gpiochip1 8)
sudo gpioset --mode=wait 1 8=0
Operação de Entrada Digital (DI)
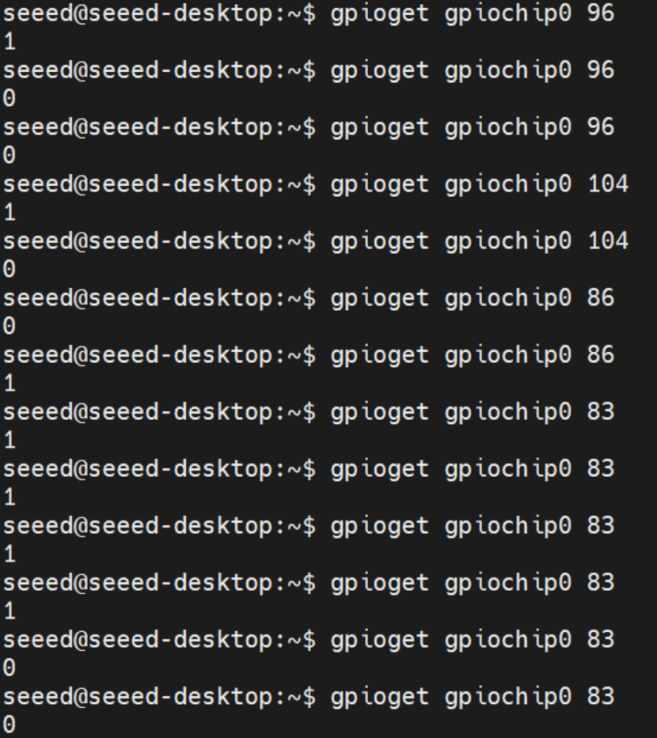
Use o comando gpioget para ler o nível de entrada do canal DI (valor de retorno 1 = nível alto, 0 = nível baixo) e obter o status dos dispositivos periféricos.
O comando para ler o Nível do Canal DI é o seguinte:
# Read DI_12V_1 (gpiochip0 96) status
gpioget gpiochip0 96
# Read DI_12V_2 (gpiochip0 104) status
gpioget gpiochip0 104
# Read DI_12V_3 (gpiochip0 86) status
gpioget gpiochip0 86
# Read DI_12V_4 (gpiochip0 83) status
gpioget gpiochip0 83
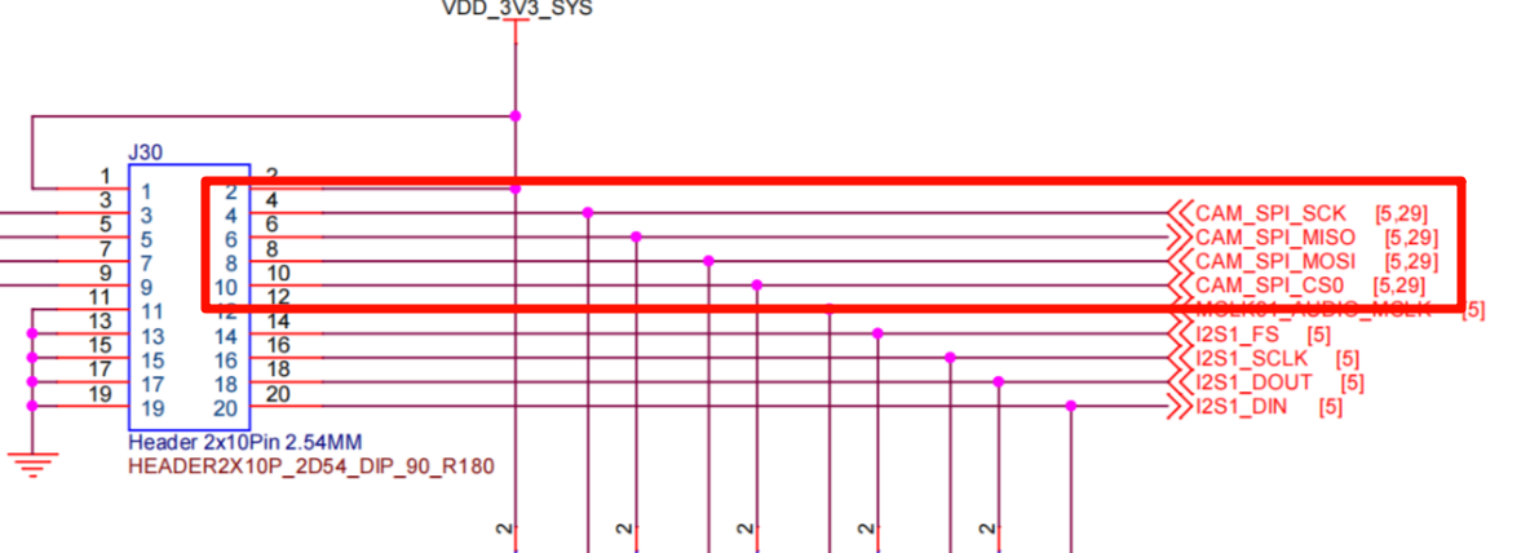
SPI
Conexão de Hardware
Instruções de Uso
Use fios Dupont para conectar os pinos principais do canal SPI de destino (tomando /dev/spidev2.0 como exemplo): Conecte o pino MOSI do SPI2.0 ao seu pino MISO (realizando transmissão/recepção de dados em loopback).
O diagrama de fiação é o seguinte:
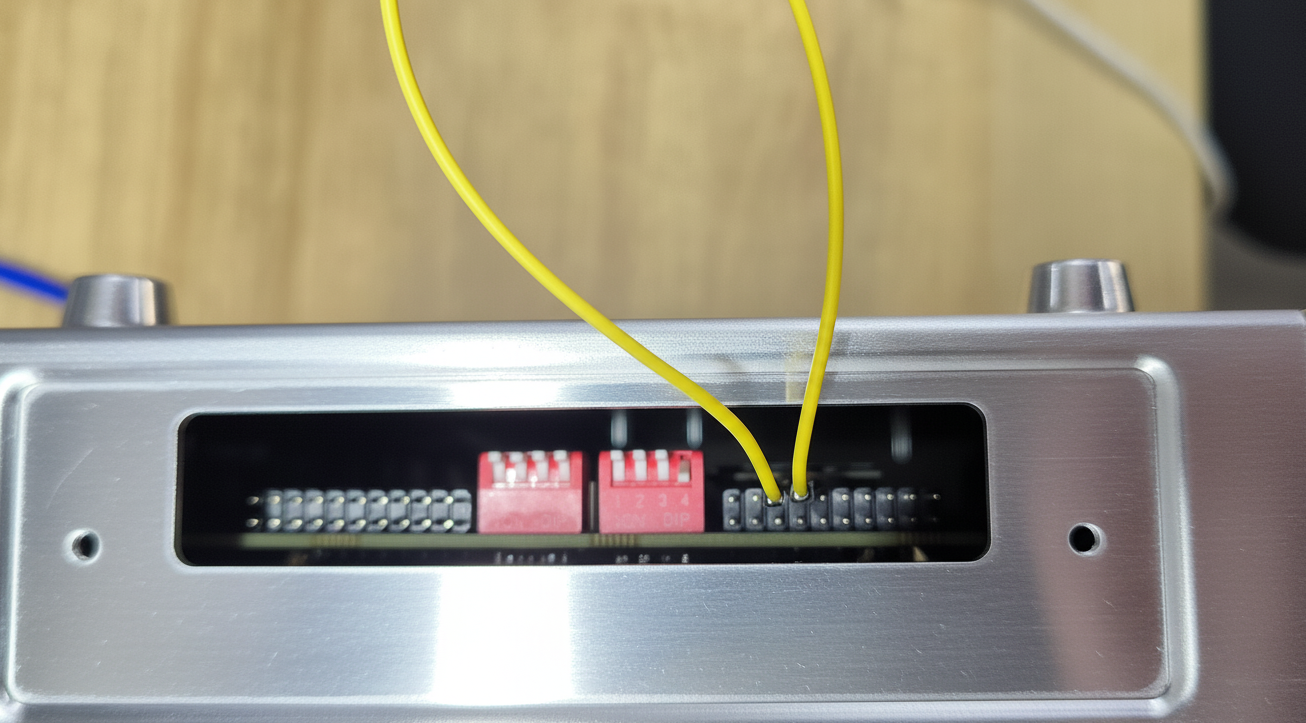
Para usar o SPI, remova a tampa lateral do dispositivo com uma chave de fenda, como mostrado acima.
Passo 1: Carregar o Módulo de Kernel SPI (Pré-requisito)
Antes de operar a interface SPI, certifique-se de que o módulo de kernel spidev esteja carregado (o sistema padrão pode pré-carregá-lo, mas é recomendável verificar manualmente):
sudo modprobe spidev
Se o comando for executado sem mensagens de erro, significa que o módulo foi carregado com sucesso; se o módulo já estiver carregado, o comando não retornará nenhuma informação, o que é um fenômeno normal.
Passo 2: Ver Visualizar os Nós de Dispositivo SPI Digite o seguinte comando no terminal para visualizar o nome do dispositivo mapeado pela interface SPI do reComputer Robotics J501:
ls /dev/spidev*
Se nenhum nó de dispositivo for exibido, isso significa que o módulo spidev não foi carregado com sucesso. Execute novamente sudo modprobe spidev e verifique o log do sistema para solução de problemas.
Etapa 3: Obter e Compilar o Código de Teste SPI
Obtenha o código de teste spidev-test do GitHub e compile-o:
git clone https://github.com/rm-hull/spidev-test
cd spidev-test
gcc spidev_test.c -o spidev_test
Etapa 4: Executar o Programa de Teste SPI
Digite o seguinte comando no terminal para executar o programa de teste SPI (tomando /dev/spidev2.0 como exemplo):
sudo ./spidev_test -v -D /dev/spidev2.0 -s 100000
Etapa 5: Verificar o Resultado do Teste Após executar o comando de teste, você pode observar no terminal o status de transmissão e recepção de dados da interface SPI2.0. A saída principal é a seguinte:
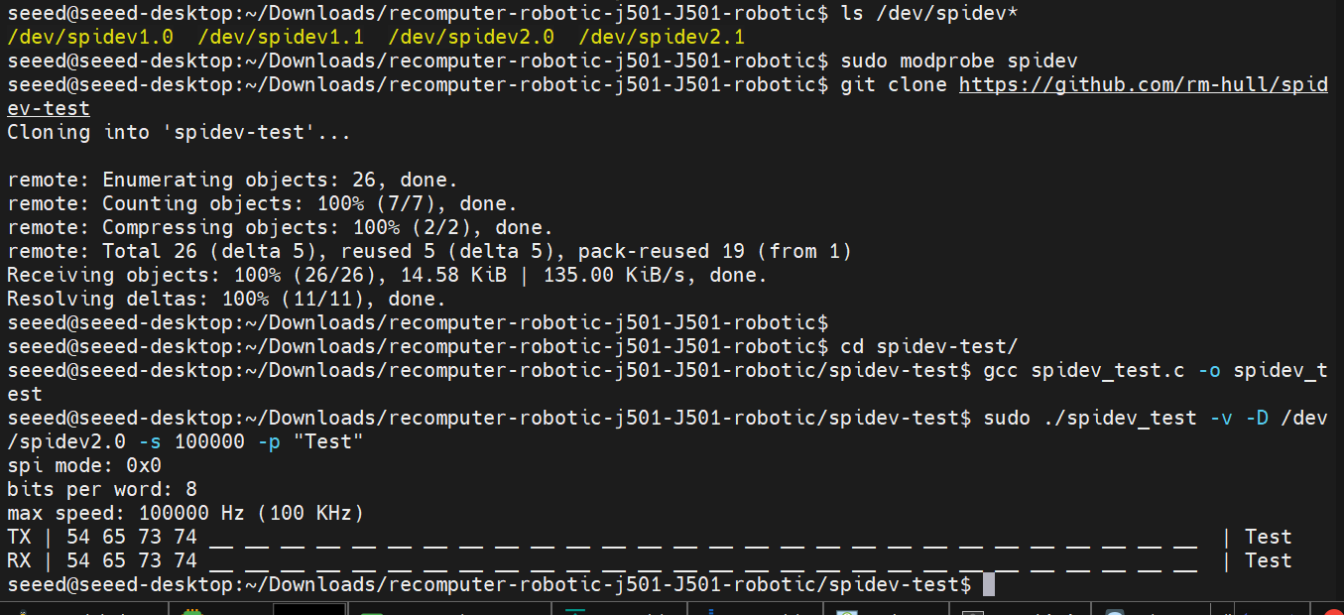
Padrão de julgamento principal: Os dados TX (transmitidos) são consistentes com os dados RX (recebidos), indicando que o teste de loopback SPI foi bem-sucedido e que a função da interface SPI está normal.
UART
O reComputer Robotics J501 está equipado com 2 interfaces UART independentes (UART1 e UART2) que suportam os modos de comunicação RS232, RS422 e RS485, apresentando transmissão de sinal estável e ampla compatibilidade com dispositivos periféricos.
Conexão de Hardware
Canais da Interface UART
| Nome do Canal | Nó do Dispositivo | Modos Suportados | Taxa de Baud Padrão | Comando de Habilitação de GPIO | Método de Troca de Modo |
|---|---|---|---|---|---|
| UART1 (DB9-1) | /dev/ttyTHS1 | RS232, RS422, RS485 | RS232: 115200 bps; RS422/RS485: 9600 bps | gpioset --mode=wait gpiochip0 2=0 | Chave DIP SW3 (DIP de 8 pinos) |
| UART2 (DB9-2) | /dev/ttyTHS4 | RS232 (padrão) | 115200 bps | gpioset --mode=wait gpiochip2 15=0 | RS232 fixa (sem chave) |
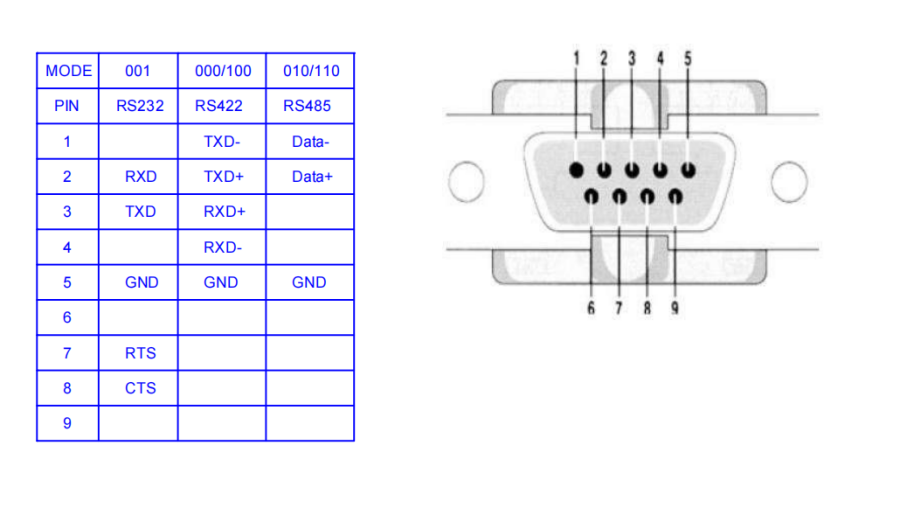
Definição de Pinout (Conector DB9)
A função de cada pino DB9 varia de acordo com o modo de comunicação. Consulte a tabela abaixo para o cabeamento correto (a numeração dos pinos segue as especificações padrão do conector DB9 macho):
| Número do Pino DB9 | Função no Modo RS232 | Função no Modo RS422 | Função no Modo RS485 |
|---|---|---|---|
| 1 | - | TXD- (Transmit Data-) | Data- (Differential Data-) |
| 2 | RXD (Receive Data) | TXD+ (Transmit Data+) | Data+ (Differential Data+) |
| 3 | TXD (Transmit Data) | RXD+ (Receive Data+) | - |
| 4 | - | RXD- (Receive Data-) | - |
| 5 | GND (Ground) | GND (Ground) | GND (Ground) |
| 6 | - | - | - |
| 7 | RTS (Request to Send) | - | - |
| 8 | CTS (Clear to Send) | - | - |
| 9 | - | - | - |
Configuração de Modo (Chave DIP SW3)
Somente a UART1 (DB9-1) suporta troca de modo por meio da chave DIP SW3 (UART2 é fixa em RS232). A chave é do tipo DIP de 8 pinos, com pinos de configuração principais rotulados como MODE_0, MODE_1 e MODE_2 no esquema.
A interface é mostrada na figura abaixo:

Regras de Configuração
| Modo de Operação | Combinação da Chave DIP (MODE_2, MODE_1, MODE_0) | Operação do Estado da Chave |
|---|---|---|
| RS232 | 0 (OFF), 0 (OFF), 1 (ON) | MODE_0: alternar para ON; MODE_1/MODE_2: manter OFF |
| RS422 | 0 (OFF), 0 (OFF), 0 (OFF) ou 1 (ON), 0 (OFF), 0 (OFF) | MODE_0/MODE_1: manter OFF; MODE_2: opcional (ON/OFF) |
| RS485 | 0 (OFF), 1 (ON), 0 (OFF) ou 1 (ON), 1 (ON), 0 (OFF) | MODE_1: alternar para ON; MODE_0/MODE_2: opcional (ON/OFF) |
Após concluir a conexão de hardware, use um software de terminal (por exemplo, CuteCom) para testar a função de comunicação UART. Se o CuteCom não estiver instalado, execute sudo apt-get install cutecom para instalá-lo. Certifique-se de que o canal UART foi habilitado por meio do comando GPIO.
Instruções de Uso
Comandos de Habilitação de GPIO
Antes de conectar, execute o comando de habilitação de GPIO no terminal para ativar o canal UART correspondente:
# Enable UART1 (ttyTHS1)
sudo gpioset --mode=wait gpiochip0 2=0
# Enable UART2 (ttyTHS4)
sudo gpioset --mode=wait gpiochip2 15=0
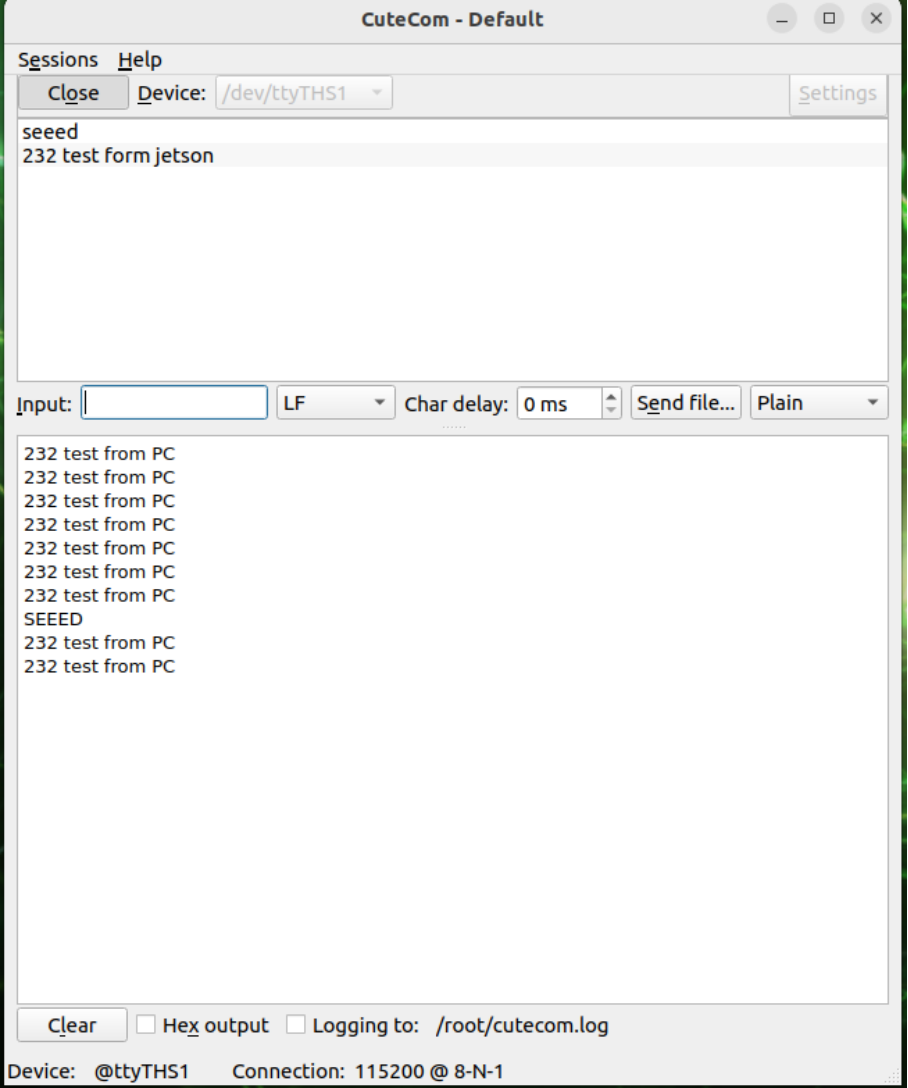
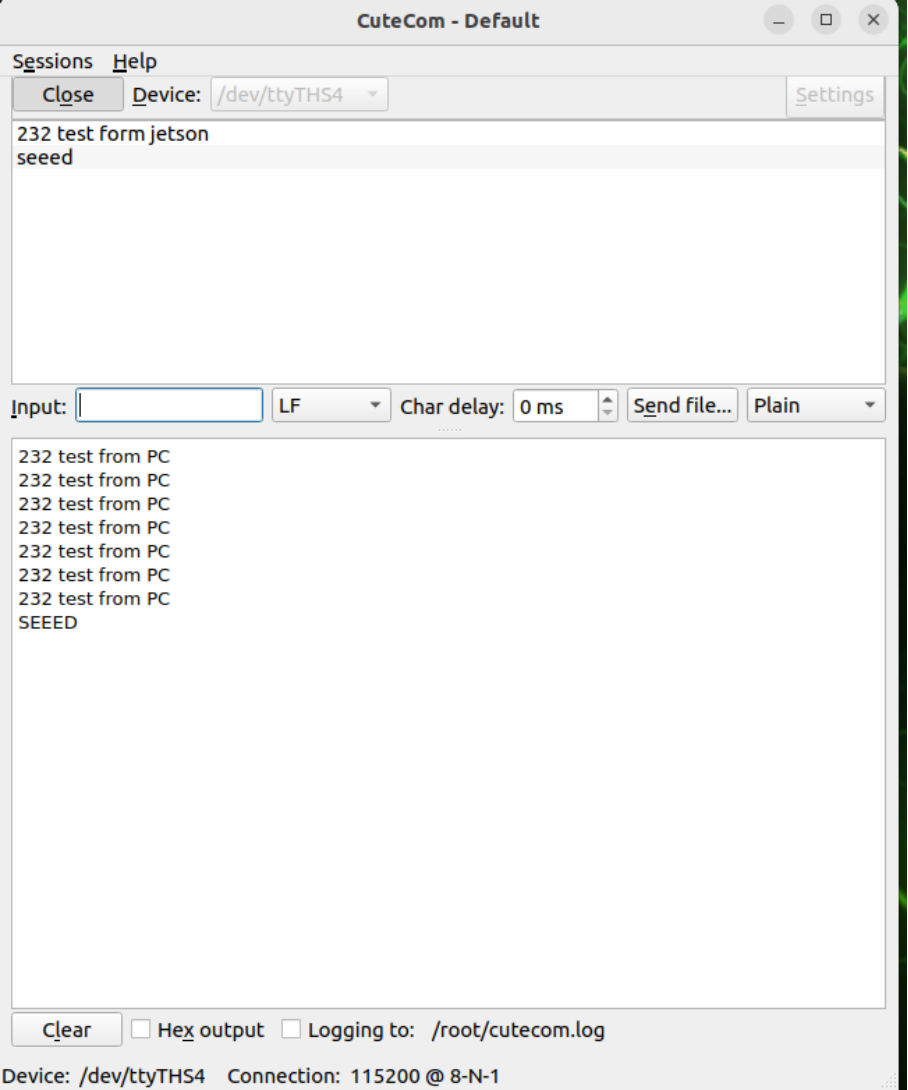
Teste em Modo RS232
Aqui você pode usar um adaptador USB para RS232 para testar a interface. Utilizamos o Adaptador UGREEN USB para RS232 para nossos testes.
O diagrama de fiação é mostrado abaixo:

Etapa 1: Iniciar o CuteCom
Execute sudo cutecom para iniciar o software de terminal CuteCom.
Etapa 2: Configurar Parâmetros da Porta Serial Configure a porta serial com os seguintes parâmetros:
- Dispositivo:
/dev/ttyTHS1(UART1) ou/dev/ttyTHS4(UART2) - Taxa de Baud: 115200 bps
- Bits de Dados: 8, Paridade: Nenhuma, Bits de Parada: 1, Controle de Fluxo: Nenhum
Etapa 3: Abrir a Porta Serial Clique em "Open Device" para abrir a porta serial.
Etapa 4: Enviar Dados de Teste Envie dados de teste (por exemplo, "232 test from jetson") e verifique a recepção de dados pelo dispositivo periférico.
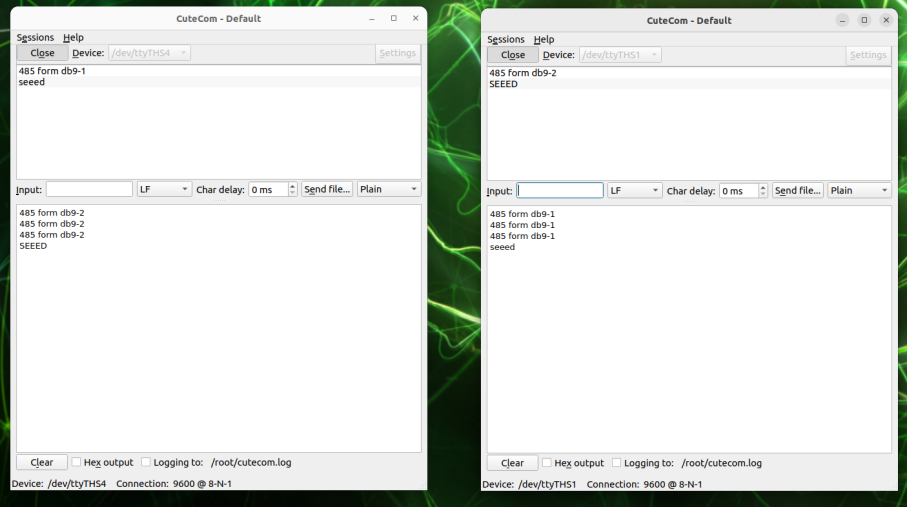
Teste em Modo RS485
Aqui você pode usar um adaptador USB para RS485 para testar a interface. Utilizamos o Adaptador DTech USB para RS485 para nossos testes.
O diagrama de fiação é mostrado abaixo:
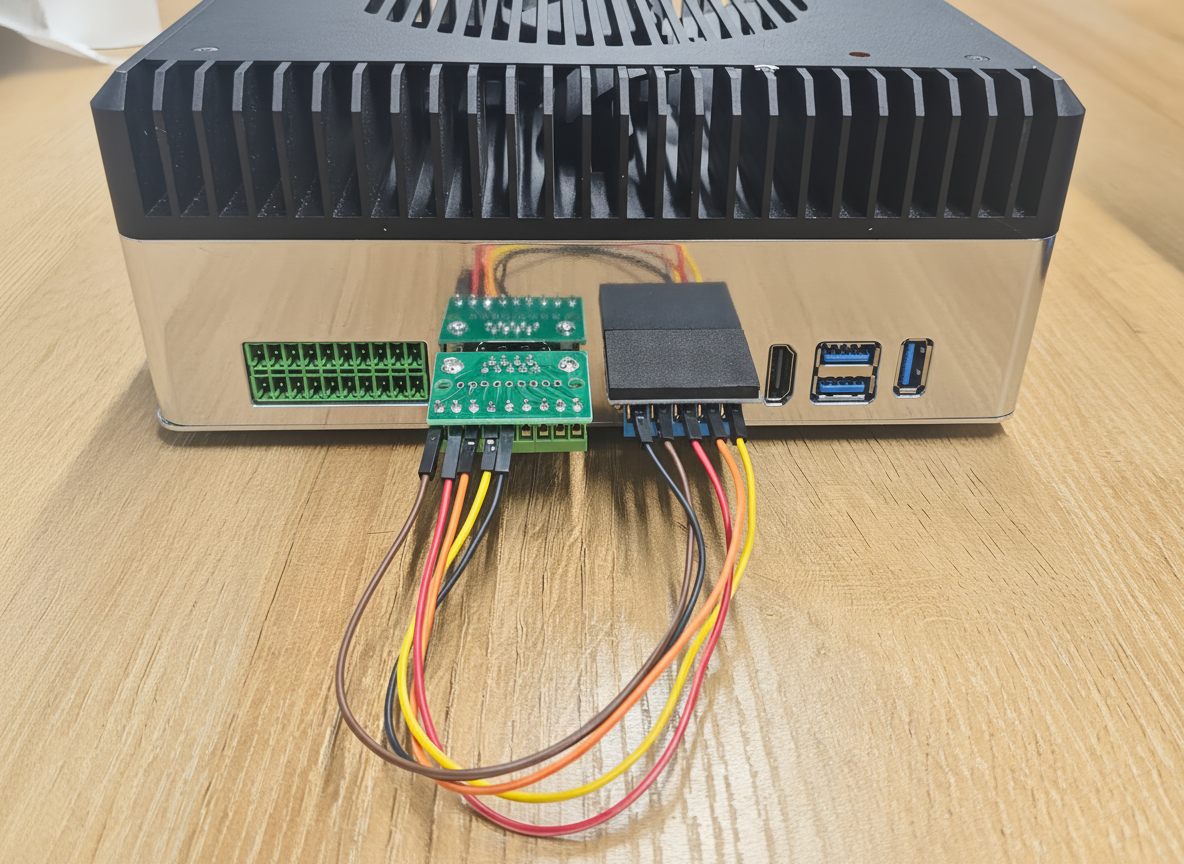
Etapa 1: Iniciar o CuteCom
Execute sudo cutecom para iniciar o software de terminal CuteCom.
Etapa 2: Configurar Parâmetros da Porta Serial Configure a porta serial com os seguintes parâmetros:
- Dispositivo:
/dev/ttyTHS1 - Taxa de Baud: 9600 bps
- Bits de Dados: 8, Paridade: Nenhuma, Bits de Parada: 1, Controle de Fluxo: Nenhum
Etapa 3: Abrir a Porta Serial Clique em "Open Device" para abrir a porta serial.
Etapa 4: Enviar Dados de Teste Envie dados de teste (por exemplo, "485 test from jetson") e verifique a recepção de dados pelo dispositivo periférico.
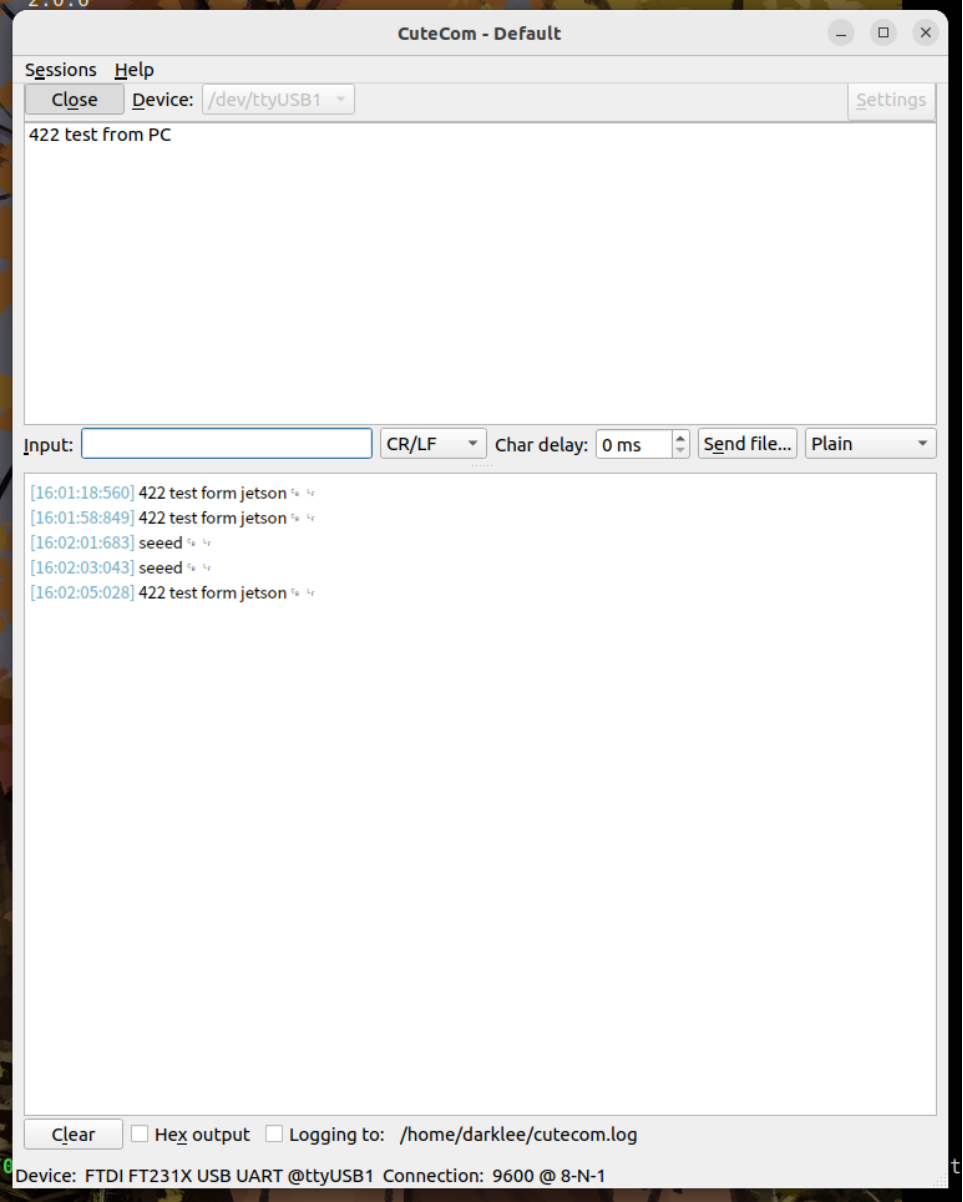
Teste em Modo RS422
Aqui você pode usar um adaptador USB para RS422 para testar a interface. Utilizamos o Adaptador DTech USB para RS485 para nossos testes.
O diagrama de fiação é mostrado abaixo:
Etapa 1: Iniciar o CuteCom
Execute sudo cutecom para iniciar o software de terminal CuteCom.
Etapa 2: Configurar Parâmetros da Porta Serial Configure a porta serial com os seguintes parâmetros:
- Dispositivo:
/dev/ttyTHS1 - Taxa de Baud: 9600 bps
- Bits de Dados: 8, Paridade: Nenhuma, Bits de Parada: 1, Controle de Fluxo: Nenhum
Etapa 3: Abrir a Porta Serial Clique em "Open Device" para abrir a porta serial.
Etapa 4: Enviar Dados de Teste Envie dados de teste (por exemplo, "422 test from jetson") e verifique a recepção de dados pelo dispositivo periférico.
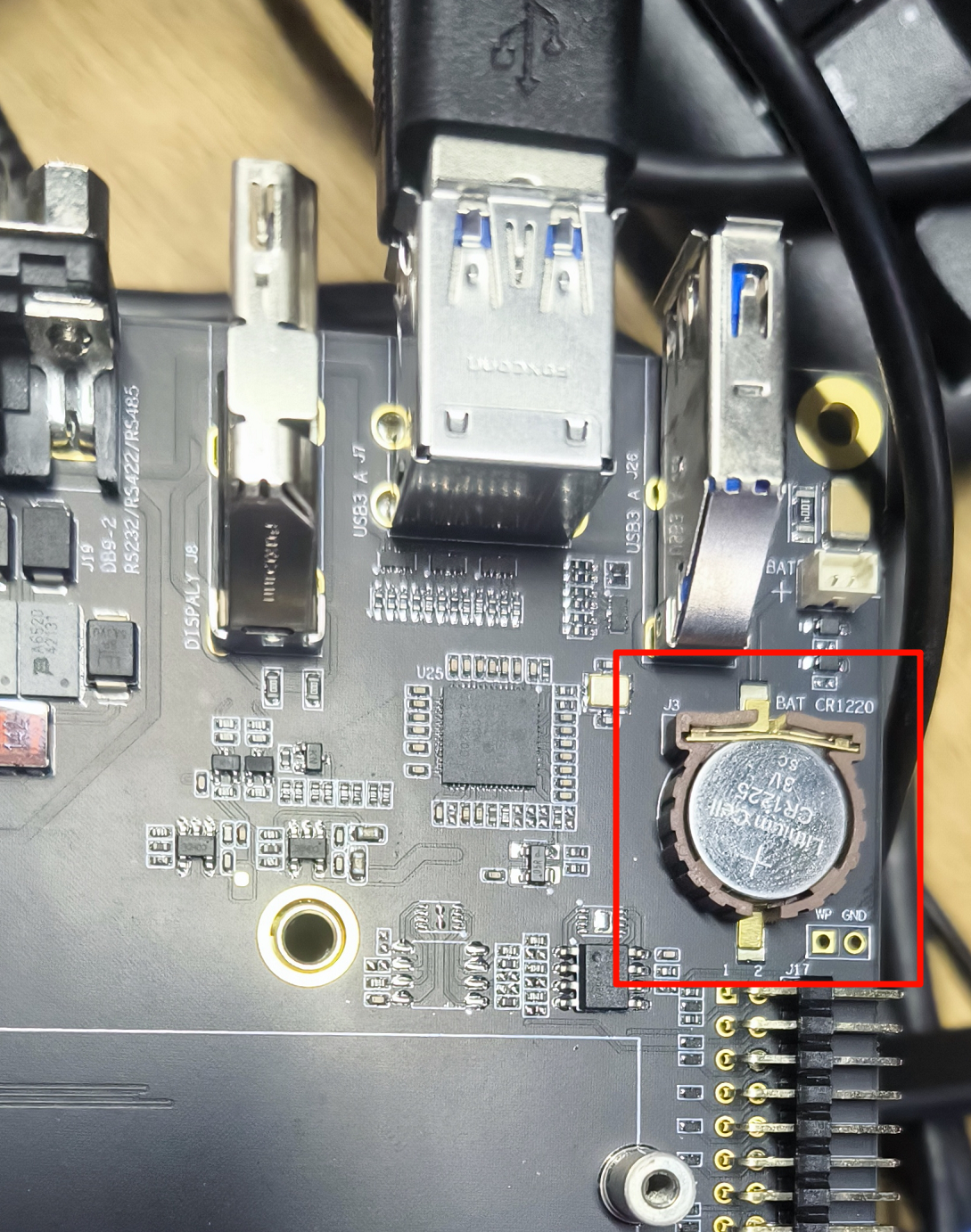
RTC
O reComputer Robotics J501 inclui um RTC de hardware com bateria de backup para manter a hora com precisão. Existem duas maneiras de fornecer energia de backup ao RTC:
- Usando o suporte para bateria tipo moeda CR1220 (J14)
- Usando o conector RTC de 2 pinos - J4 para conexão de alimentação externa
Conexão de Hardware
Método 1: Usando o Suporte para Bateria Tipo Moeda CR1220
Conecte uma bateria tipo moeda CR1220 de 3 V ao soquete RTC na placa, como mostrado abaixo. Certifique-se de que a extremidade positiva (+) da bateria esteja voltada para cima.
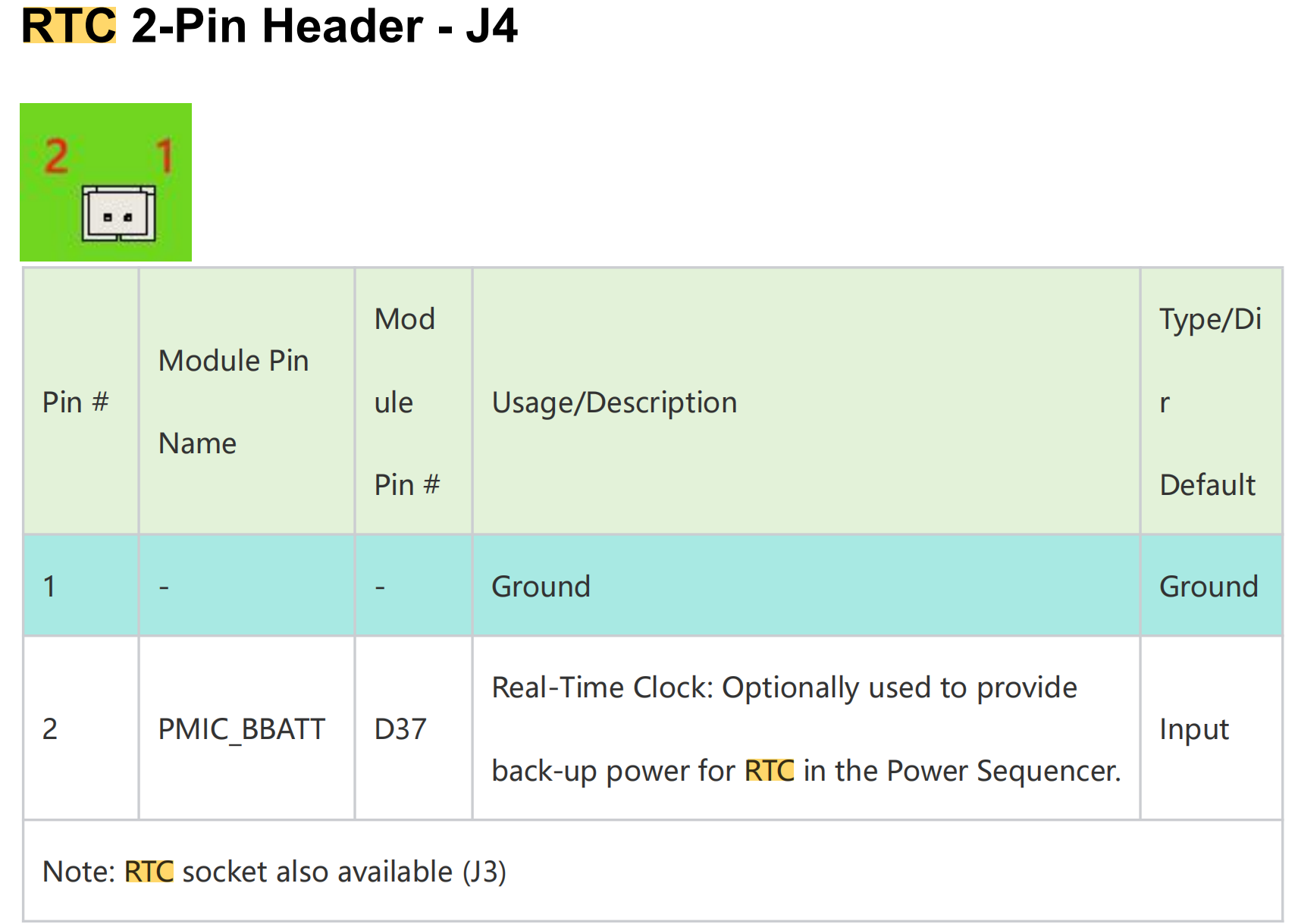
Método 2: Usando o Conector RTC de 2 Pinos
O conector RTC de 2 pinos fornece uma maneira alternativa de conectar alimentação externa ao RTC.
Instruções de Uso
Etapa 1. Conecte uma bateria ao RTC conforme mencionado acima.
Etapa 2. Ligue o reComputer Robotics J501.
Etapa 3. No desktop do Ubuntu, clique no menu suspenso no canto superior direito, navegue até Settings > Date & Time, conecte-se a uma rede por meio de um cabo Ethernet e selecione Automatic Date & Time para obter a data/hora automaticamente.
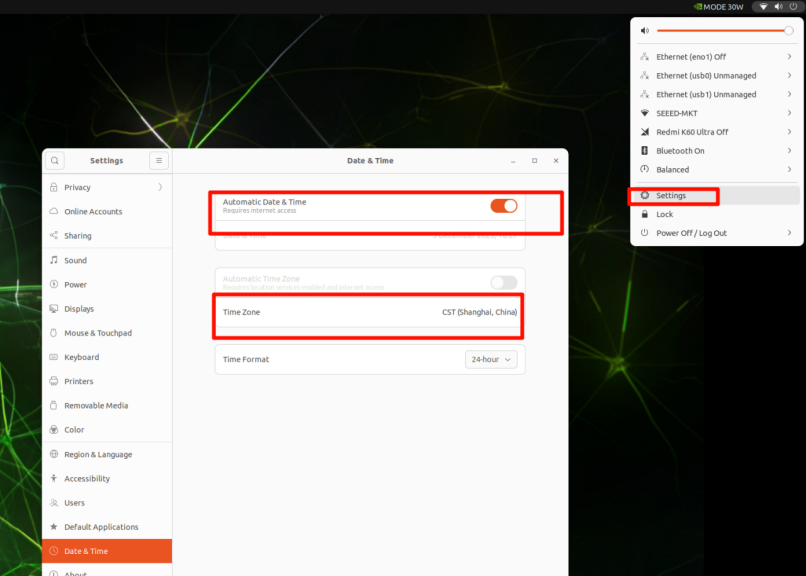
Se você não tiver se conectado à internet via Ethernet, poderá definir a data/hora manualmente aqui.
Etapa 4. Abra uma janela de terminal e execute o comando abaixo para verificar a hora do relógio de hardware:
cat /sys/devices/platform/bpmp/bpmp\:i2c/i2c-4/4-003c/nvvrs-pseq-rtc/rtc/rtc0/time
Passo 5. Desconecte a conexão de rede e reinicie o dispositivo. Você verá que o horário do sistema perdeu a alimentação, mas ainda funciona normalmente.

Exibição
O Robotics J501 é equipado com uma interface HDMI para saída de vídeo em alta resolução.
Porta de Extensão
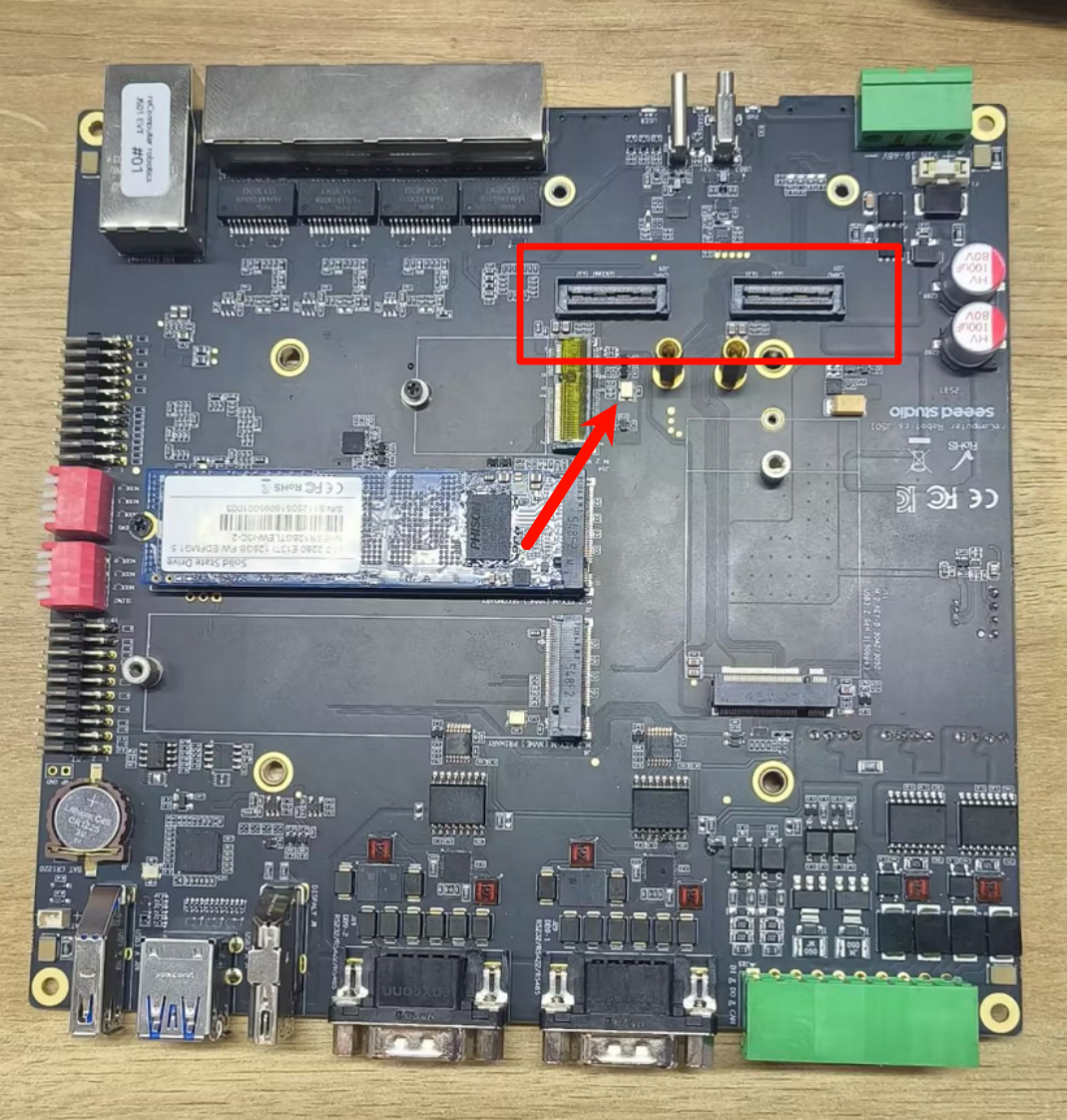
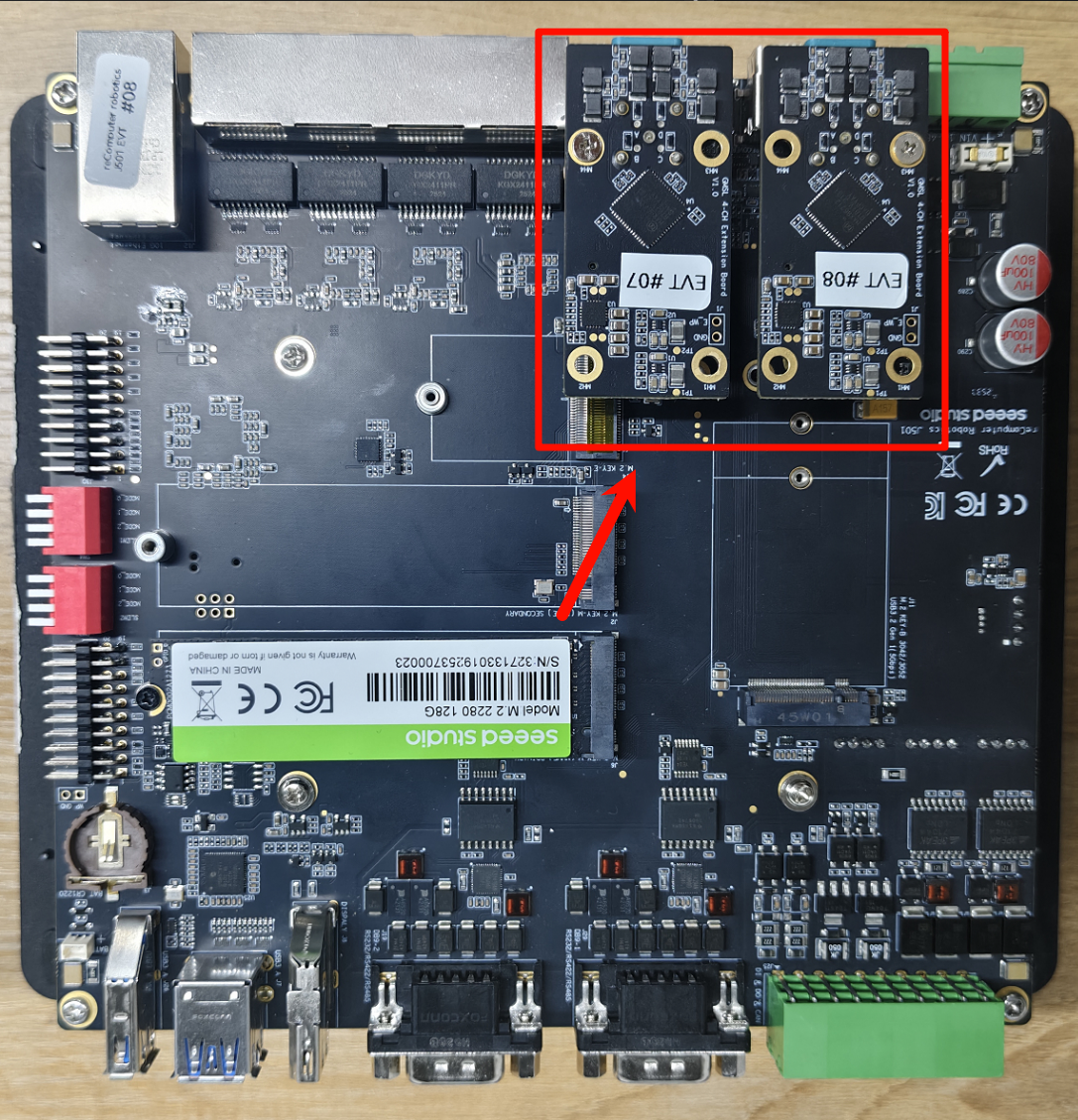
A placa carrier Robotics J501 possui um conector de expansão de câmera para placa de extensão GMSL. Ela pode conectar e operar simultaneamente quatro câmeras GMSL ao mesmo tempo.
Conexão de Hardware
A seguir estão os slots de conexão da placa de expansão de câmera GMSL da placa carrier Robotics J501 (é necessário preparar uma placa de extensão com antecedência):
A seguir estão os modelos de câmeras GMSL que já suportamos:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
- Orbbec Gemini 335Lg
Instruções de Uso
Antes de habilitar a funcionalidade GMSL, verifique se você instalou uma versão do JetPack com o driver da placa de expansão GMSL.
Configurar o arquivo Jetson IO
sudo /opt/nvidia/jetson-io/jetson-io.py
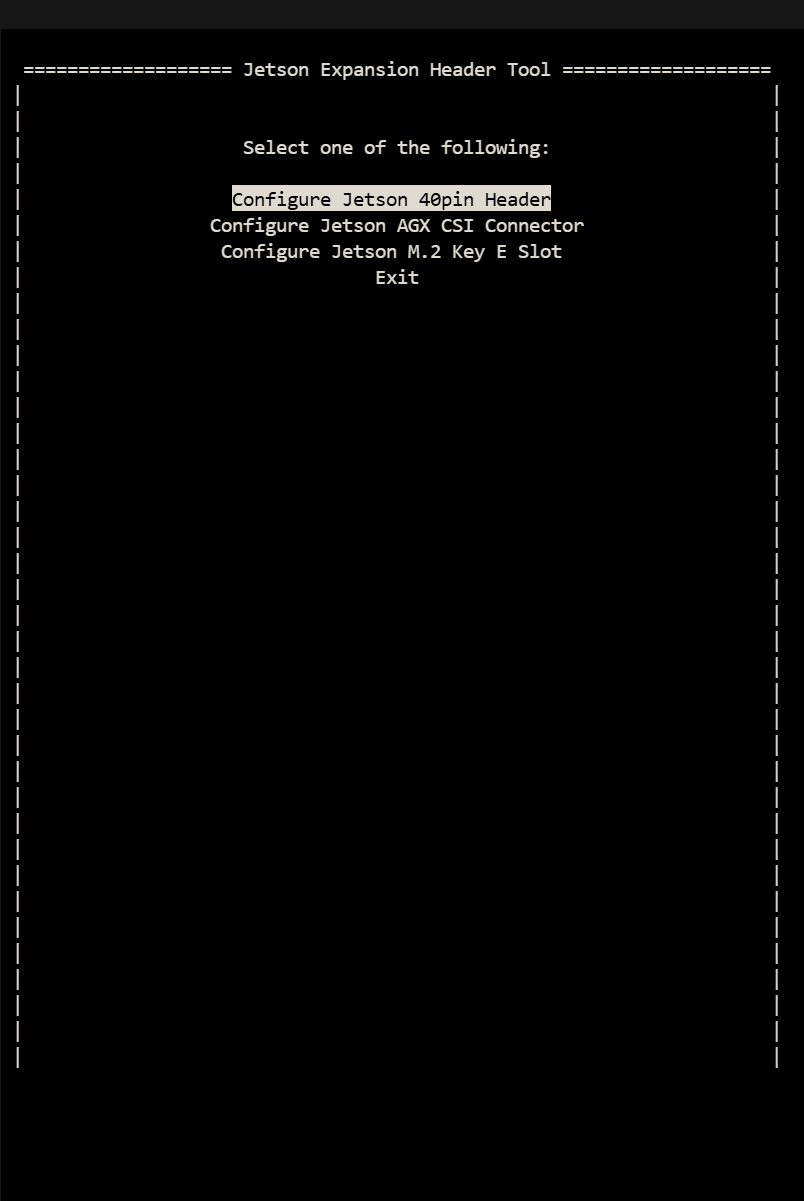
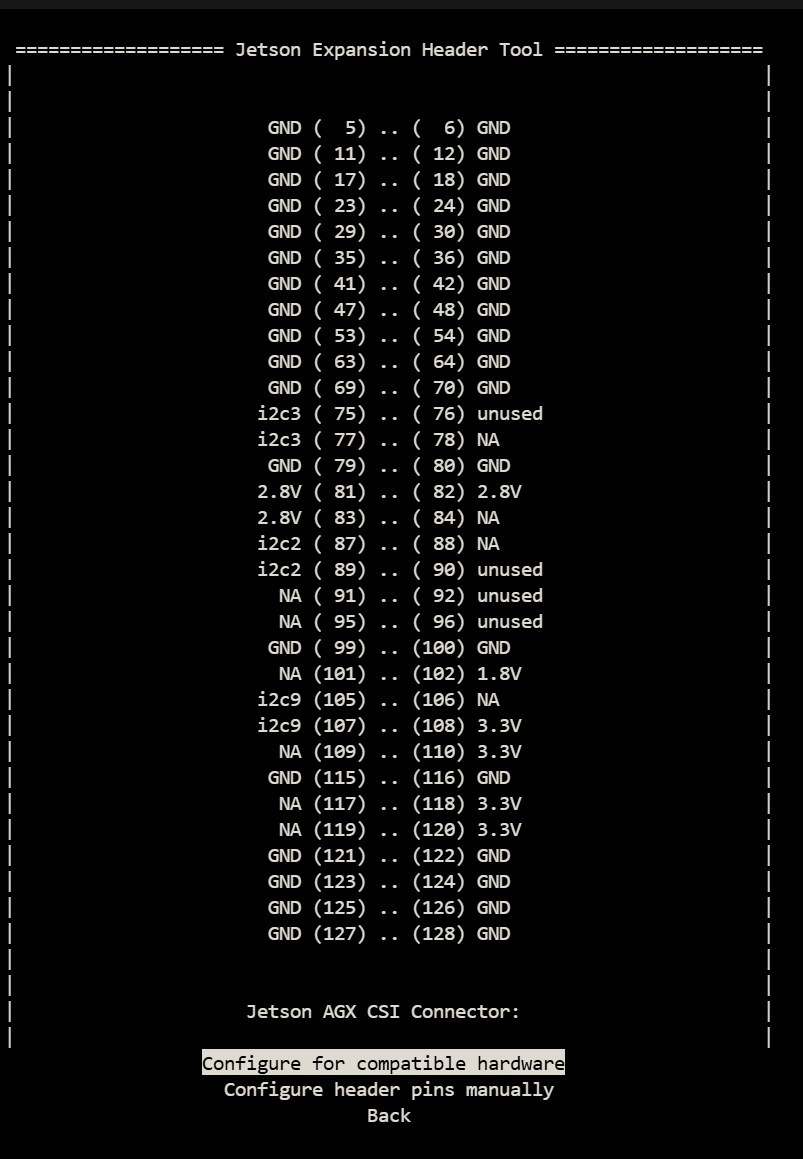
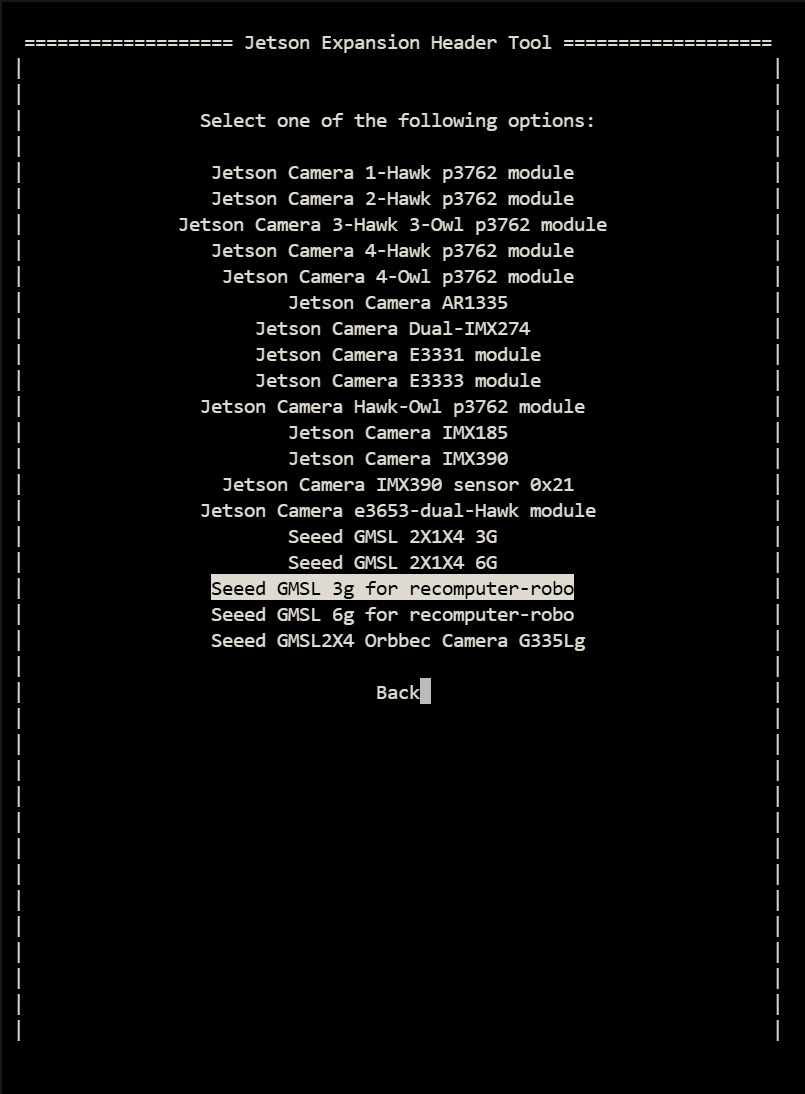
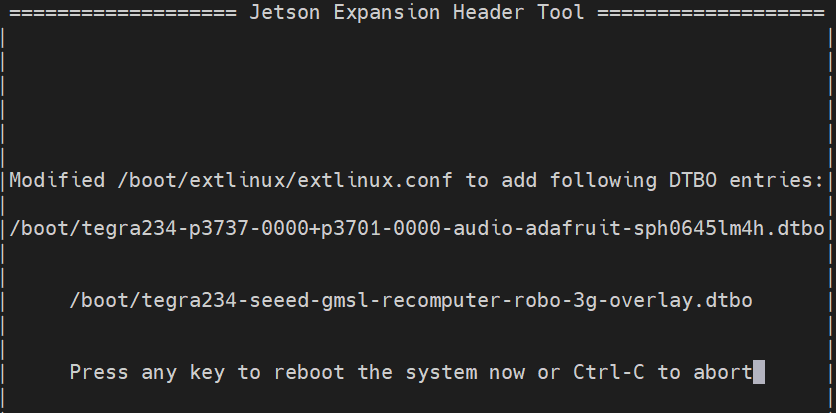
Existem ao todo três arquivos de overlay, a saber, Seeed GMSL 1X4 3G, Seeed GMSL 1X4 6G, Seeed GMSL 1X4 e Orbbec Gemini 335Lg. Estes correspondem, respectivamente, à câmera 3G da SG3S, às câmeras 6G da SG2 e SG8S e à câmera da Orbbec. Conforme mostrado na Figura 3, configure o arquivo io de acordo com o modelo da sua câmera.
passo 2. Instale as ferramentas de configuração da interface de vídeo.
sudo apt update
sudo apt install v4l-utils wmctrl
Usar as câmeras da Série SGxxx
passo 1. Defina o modo de sincronização de quadros (não é habilitado por padrão!).
Aqui mostramos como configurar câmeras de diferentes modelos e resoluções.
#enables frame synchronization
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
#Set the frame rate of the camera
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 --stream-mmap -d /dev/video0
#Set the camera format
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
trig_mode = 1 habilita a sincronização de quadros, enquanto trig_mode = 0 desabilita a sincronização de quadros. A configuração padrão é desabilitar a sincronização de quadros.
--set-fmt-video segue a resolução que é selecionada com base na câmera conectada. Atualmente, há três opções de sensor_mode, cada uma correspondendo a uma resolução diferente.
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
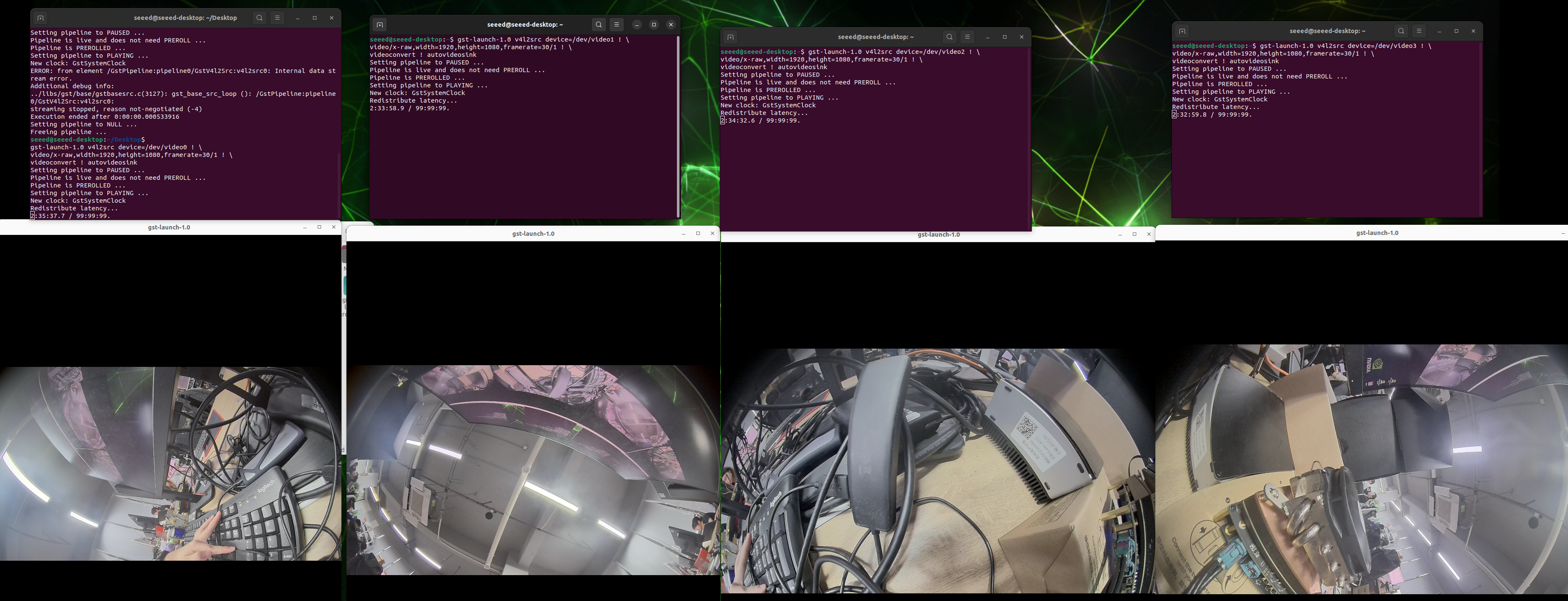
passo 2. Inicie a câmera.
gst-launch-1.0 \
v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video1 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video2 ! \
video/x-raw,format=YUY2,width=1536,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video3 ! \
video/x-raw,format=YUY2,width=3840,height=2160,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
Recursos
- Esquemático da Placa Carrier reComputer Robotics J501
- Datasheet da Placa Carrier reComputer Robotics J501
- Catálogo de Produtos Seeed NVIDIA Jetson
- Comparação Nvidia Jetson
- Casos de Sucesso Seeed Nvidia Jetson
- Seeed Jetson One Pager
- Código-fonte do L4T da Seeed
Suporte Técnico & Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes formas de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos diversos canais de comunicação para atender a diferentes preferências e necessidades.