Introdução ao Atom-S
Introdução
O Atom-S é um kit de robô humanóide bípedo open source com 10 DOF (Graus de Liberdade), projetado para desenvolvedores, makers e instituições de ensino. O robô é acionado por dez servos de barramento Fashionstar RA8-U25H-M, possui uma estrutura totalmente impressa em 3D e é equipado com um controlador principal Seeed Studio XIAO ESP32-S3 e uma placa de expansão Grove. Ele vem com firmware de controle completo pré-instalado de fábrica. Seu principal destaque é o editor visual de movimentos baseado na web, dispensando instalação — você pode depurar servos em tempo real, gravar movimentos por ensino e exportar JSON diretamente pelo navegador, facilitando a replicação em plataformas como Arduino, STM32 e Raspberry Pi. A placa adaptadora RUC-01 incluída fornece alimentação regulada de 5 V / 3,3 V e uma interface UART, suportando controle remoto via Bluetooth e web. Pronto para uso imediato, é uma plataforma ideal para desenvolvimento de robótica de mesa e verificação de algoritmos.

1. Introdução ao produto
- Layout de DOF: O robô possui 10 graus de liberdade cobrindo braços, tronco e pernas.
- Estrutura e Aparência: Estrutura totalmente impressa em 3D com arquivos de modelo STP / STL oficialmente open source, facilitando a substituição de peças, o reforço estrutural e o redesign estético.
- Atuadores das Juntas: Dez servos de barramento Fashionstar RA8-U25H-M com comunicação em barramento para uma fiação limpa e simplificada.
- Editor de Movimentos via Web: Um painel de controle baseado em navegador que suporta depuração de servos em tempo real e programação em modo de ensino. Grupos de movimento concluídos podem ser exportados como arquivos
.jsonpadrão para fácil análise em plataformas Arduino, STM32 e Raspberry Pi. - Pronto para Uso: Enviado com o Seeed Studio XIAO ESP32-S3 como controlador principal padrão, com programas de demonstração pré-gravados de fábrica.
- Expansão Multi-Módulo: Em conjunto com a placa de expansão Seeed Studio XIAO, a interface Grove onboard permite a conexão de sensores e controladores Seeed Grove.
- Compatibilidade Multiplataforma: A placa adaptadora RUC-01 fornece saída de energia de 5 V / 3,3 V e uma interface UART; qualquer controlador com capacidade de porta serial pode se comunicar com ela.
- Extensibilidade do Ecossistema: Aproveitando as interfaces Grove na placa de expansão Seeed Studio XIAO, sensores de visão, de ambiente e outros sensores e módulos de controle do ecossistema Grove podem ser integrados rapidamente.
- Compatibilidade Multiplataforma: A placa adaptadora padrão RUC-01 fornece saída regulada de 5 V / 3,3 V e uma interface de comunicação UART universal, facilitando a conexão a plataformas externas como Raspberry Pi, STM32, Arduino, ESP32 ou PC.
2. Especificações
| Parâmetro | Valor |
|---|---|
| Graus de Liberdade (DOF) | 10 |
| Chassi | Impresso em 3D |
| Servos | Servo de Barramento RA8-U25H-M |
| Placa de Alimentação / Interface dos Servos | RUC-01, fornecendo 4 portas de servo de barramento, alimentação de 5 V / 3,3 V para o controlador e serial (Grove) |
| Controlador Principal | Seeed Studio XIAO ESP32-S3 + Placa de Expansão Seeed Studio XIAO |
| Comunicação | Comunicação Serial Assíncrona (UART) |
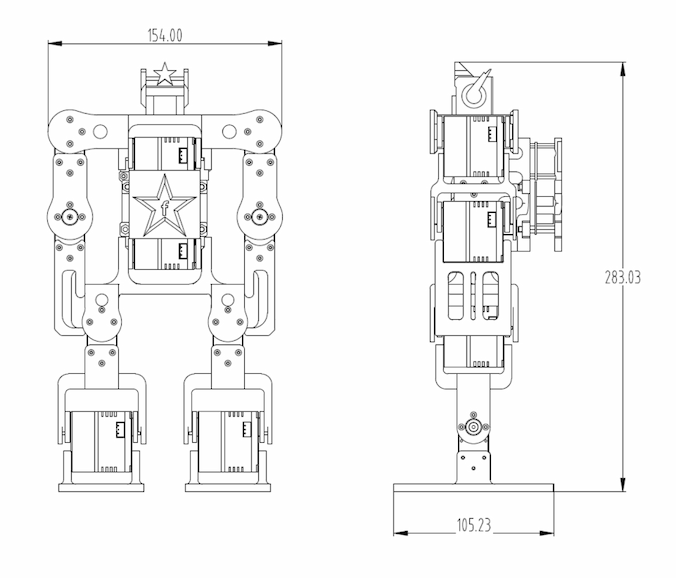
| Dimensões | 154 × 105 × 283 mm |
3. Lista de Materiais
| Item | Qtde |
|---|---|
| Robô 10-DOF (Montado) | 1 |
| Parafuso KM M2 × 7 mm | 10 |
| Parafuso KB M2 × 7 mm | 10 |
| Parafuso PM M3 × 6 mm | 2 |
| Cabo de Servo 200 mm 3 pinos | 2 |
Conteúdo da Montagem do Robô 10-DOF
- RA8-U25H-M × 10
- Peças Estruturais (Kit) × 1
- Placa Adaptadora RUC-01 × 1
- Seeed XIAO ESP32-S3 × 1
- Placa de Expansão Seeed XIAO × 1
4. Dimensões Externas
5. Arquitetura de Hardware
Acionamento e Alimentação (Placa de Interface RUC-01)
Servindo como o hub de alimentação e comunicação de todo o robô, ela lida com o gerenciamento do barramento e a distribuição de energia:
- Barramento dos Servos: Quatro portas de servo de barramento onboard com suporte a expansão em cadeia (daisy-chain), transportando sinal e alimentação.
- Interface de Configuração via PC: USB Type-C, permitindo conexão direta a um host PC para configuração.
- Alimentação do Sistema: Faz a conversão de tensão para fornecer energia estável à placa controladora principal.
- Interface de Comunicação: Porta serial UART padrão para receber comandos do controlador principal de nível superior.
Controlador Lógico e Expansão (MCU + Placa de Expansão Grove)
O "cérebro" do robô, responsável por executar algoritmos de controle e processamento de dados de sensores:
- MCU Central: Placa de desenvolvimento da série Seeed Studio XIAO, compacta porém poderosa.
- Expansão de Ecossistema: A placa de expansão Grove disponibiliza um conjunto rico de interfaces de E/S.
- Funções Principais: Executa programas de cinemática do robô e conecta sensores (ultrassônico, visão, voz etc.) via interfaces Grove para realizar capacidades interativas.
Fluxo de Dados
Modo de Depuração / Edição
PC --(USB)--> RUC-01 --(Bus)--> Servos
Descrição: Os ângulos dos servos são ajustados e os grupos de movimento são salvos diretamente via software de PC, sem passar pelo controlador principal XIAO.
Modo de Execução Autônoma
Sensor / Remote --(Signal)--> XIAO --(UART Command)--> RUC-01 --(Bus)--> Servos
Descrição: O XIAO controla o robô de forma autônoma com base no feedback dos sensores ou em código pré-armazenado.
Referência de Interface de Comunicação Universal (Leitura Obrigatória para Desenvolvimento Multiplataforma)
Embora o kit use o XIAO ESP32S3 como controlador principal padrão, a placa de interface RUC-01 é aberta a qualquer controlador externo. Apenas quatro fios são necessários entre o controlador principal e a RUC-01 para comunicação básica:
- 5 V / 3,3 V: A RUC-01 pode fornecer de volta alimentação estável ao controlador principal.
- GND: Terra comum.
- RX / TX: Comunicação serial assíncrona padrão (UART) para envio/recebimento de comandos de controle e leitura do feedback dos servos.
| Nº | Descrição da Interface | Nº | Descrição da Interface |
|---|---|---|---|
| ① | Interruptor Principal de Alimentação | ⑤ | UART de Comunicação da Placa Adaptadora / Interface Grove (conecta ao Controlador Principal ⑧) |
| ② | Porta de Entrada de Alimentação | ⑥ | Porta de Dados Type-C do Controlador Principal ESP32S3 (download de firmware) |
| ③ | Porta de Servo × 4 | ⑦ | Placa Controladora Principal Seeed XIAO ESP32S3 |
| ④ | Porta de Dados Type-C (depuração dos servos, conecta ao PC) | ⑧ | UART de Comunicação do Controlador Principal / Interface Grove (conecta à Placa de Interface RUC-01 ⑤) |
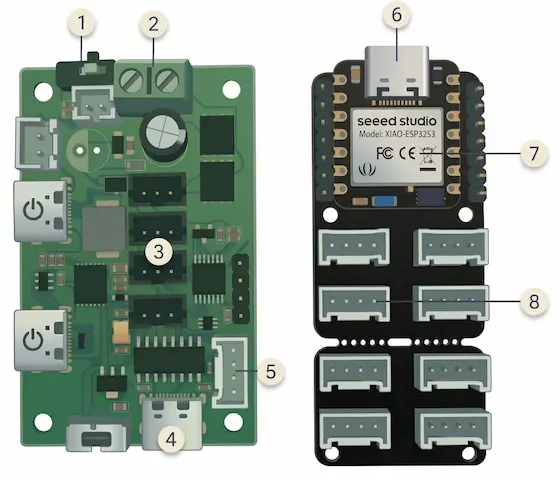
A chave seletora próxima à porta Type-C ④ na placa de interface RUC-01, bem como as duas portas Type-C mostradas no lado esquerdo do diagrama, são reservadas para outros fins e não são usadas neste projeto. Evite operá-las por engano.
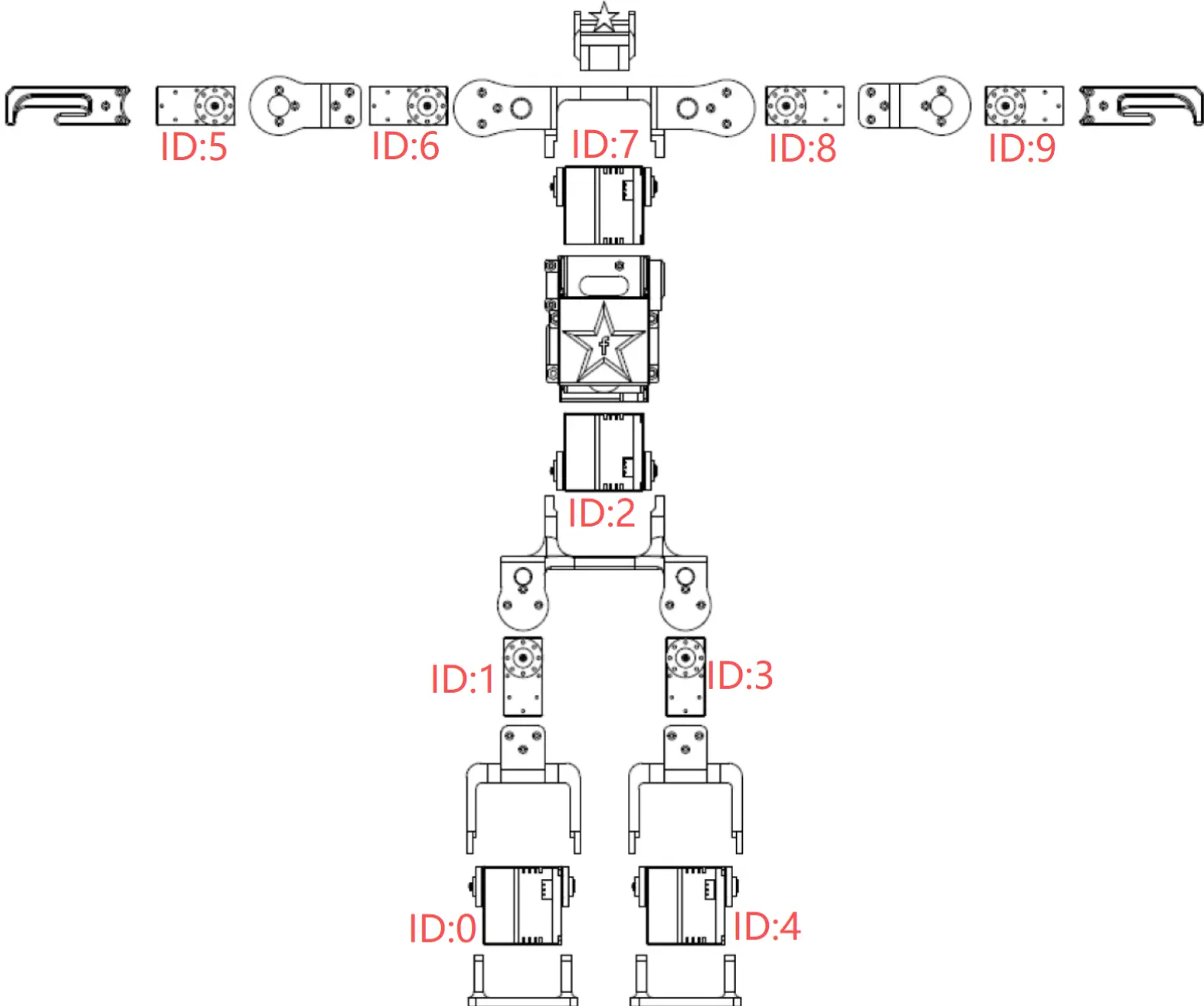
6. Estrutura Mecânica
- Visão Geral da Estrutura e IDs Padrão dos Servos
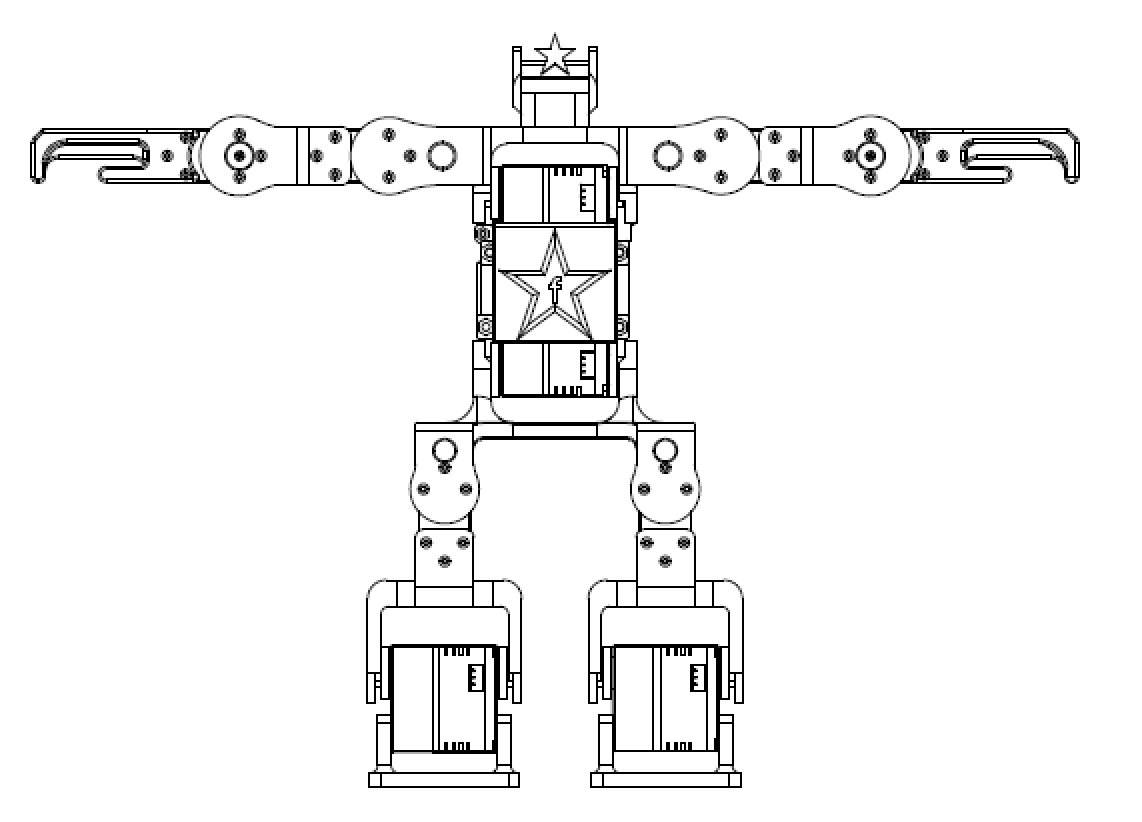
- Posição de Zero Grau de Todos os Servos
7. Desenhos e Download de Modelos
Para obter todos os dados de impressão 3D, visite: MakerWorld - Atom S
Forneceremos gradualmente vídeos de montagem mais completos e instruções ilustradas; fique atento às atualizações desta página.
8. Executando Sua Primeira Demo
Guia Rápido Fora da Caixa
O Atom S sai de fábrica com o programa básico de controle gravado e a montagem inicial concluída. Basta preparar uma fonte de alimentação e um smartphone para experimentar rapidamente os movimentos do robô e os recursos de controle remoto.
Preparação de Alimentação de Hardware
Devido a restrições de envio, o kit não inclui uma bateria por padrão. Antes de começar, prepare uma bateria compatível e conecte-a à porta de alimentação na parte de trás do robô:
- Especificação da Bateria: Bateria Li-Po (polímero de lítio) 3S 12,6 V
- Tipo de Conector da Bateria: T-Plug
- Verificação de Energização: Após conectar a alimentação, o LED indicador na placa controladora principal (XIAO ESP32S3) acenderá, indicando que o sistema foi iniciado.
Conexão ao Controle Remoto via Web
Ative o Bluetooth no seu smartphone ou PC com Bluetooth e escolha um navegador compatível com base no seu sistema operacional. Como o controle remoto web depende da API Web Bluetooth subjacente, a compatibilidade do navegador é crítica:
- PC (Windows / macOS): Use Google Chrome ou Microsoft Edge.
- Android: Use Google Chrome; não use o navegador padrão do sistema nem abra via leitura de QR no WeChat.
- iOS: Safari, Chrome e Edge não suportam Web Bluetooth. Baixe um navegador de terceiros que suporte o protocolo WebBLE na App Store, como o Bluefy.
URL de Acesso: Remote Controller
- Desconectado:

- Toque no botão SYSTEM LINK na parte superior da interface para procurar e conectar ao dispositivo:
- Na lista de dispositivos Bluetooth que aparecer, selecione o dispositivo chamado ESP32_Pro_Remote e toque em Pair.
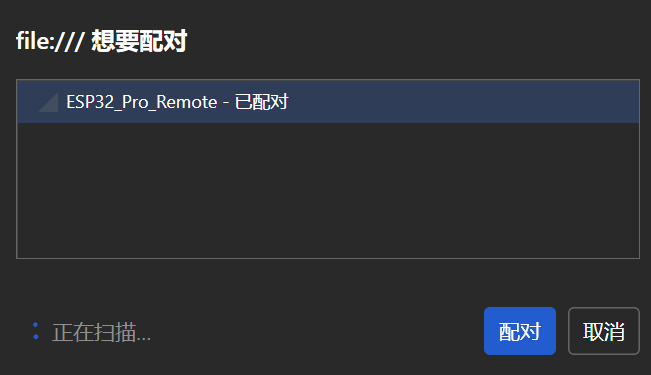
- Conectado: Depois de conectado, o robô executará automaticamente um movimento de "reverência" e retornará à pose padrão em pé, indicando que o sistema está pronto.

Inicie sua primeira sequência de ensino de movimento contínuo
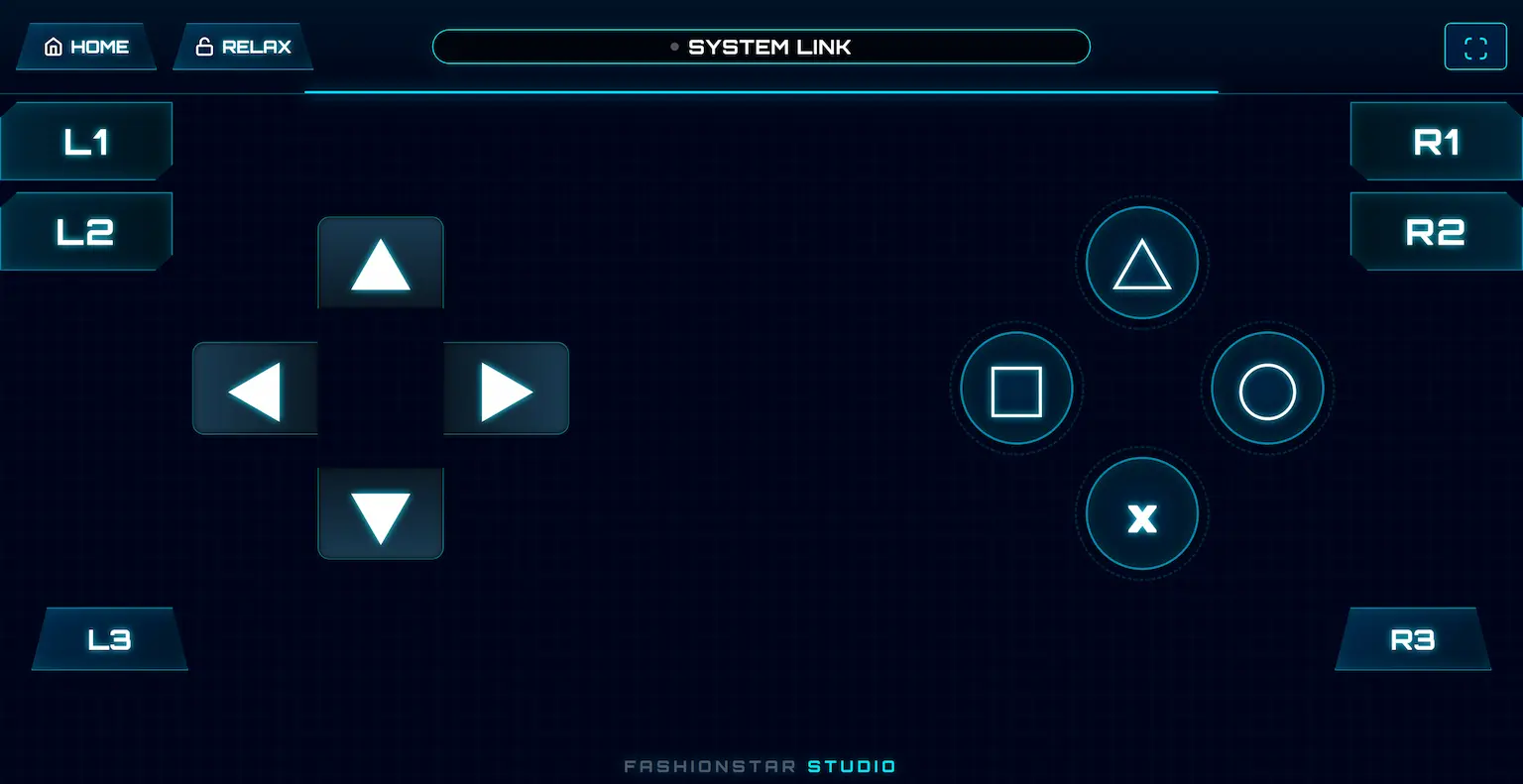
Usando o gamepad virtual na web, você pode ensinar rapidamente ao robô uma sequência de movimentos contínuos sem escrever nenhum código:
- Preparação: Toque no botão HOME no canto superior esquerdo para garantir que o robô esteja na pose inicial padrão em pé.
- Desbloquear juntas: Toque no botão RELAX no canto superior esquerdo para colocar o robô em modo de amortecimento. Neste ponto, todos os servos ficam desenergizados, permitindo que você mova manualmente cada junta.
- Registrar o primeiro quadro: Posicione manualmente o robô e, em seguida, toque na tecla direcional Esquerda ◀ para registrar a pose atual.
- Registrar quadros subsequentes: Continue alterando a pose do robô e toque em Esquerda ◀ novamente. Repita esse processo para registrar uma sequência de quadros de movimento; até 100 quadros são suportados por padrão.
- Reproduzir a sequência de movimento: Depois que todas as poses forem registradas, toque na tecla direcional Direita ▶, e o robô reproduzirá suavemente todos os movimentos gravados.
- Ajustar a velocidade de reprodução: Se a reprodução estiver muito rápida ou muito lenta, toque em Cima ▲ (acelerar) ou Baixo ▼ (desacelerar) para ajustar a velocidade do movimento.
- Demonstração com um toque: Toque no botão Quadrado □ à direita para reproduzir diretamente o movimento de demonstração padrão de fábrica.
Se você concluiu a experiência rápida e deseja exportar o JSON de movimento, modificar a lógica do controlador principal ou conectar outros controladores, continue lendo as seções a seguir.
9. Fluxo de trabalho principal para desenvolvimento de movimentos personalizados
Design de poses e exportação de dados (Editor de Movimento Web)
-
Conectar e ler: Conecte-se à placa de interface RUC-01 por meio de um navegador de PC para ler em tempo real os estados dos servos do robô.
-
Desbloquear e ensinar: Desenergize os servos para o modo de amortecimento com um clique, mova o robô manualmente e registre a pose de cada quadro.
-
Organizar e ajustar: Ajuste o tempo de execução e o intervalo entre quadros-chave e reproduza em tempo real no software para otimizar a fluidez do movimento.
-
Exportar JSON: Depois de confirmar que o movimento está correto, exporte todo o grupo de movimentos como um arquivo
.jsonpadrão.
Integração de dados e gravação de firmware (Controlador principal ESP32)
- Código aberto: Abra o código-fonte do projeto do controlador principal ESP32 incluído na Arduino IDE.
- Substituir código: Copie integralmente os dados
.jsonexportados e substitua o conteúdo da variáveljsonDataexistente no arquivoRobot.ino. - Compilar e gravar: Recompile o projeto e grave o firmware atualizado na placa controladora principal ESP32S3.
Controle remoto sem fio e execução acionada (Terminal remoto Web)
- Conexão sem fio: Abra o controle remoto da web no telefone em Remote Controller e faça o pareamento com o robô.
- Acionamento com um toque: Toque no botão Quadrado □ na interface (comando
0x10), e o robô executará de forma autônoma e contínua a sequência de movimentos recém-projetada, sem o cabo de dados.
Guia do Editor de Movimento
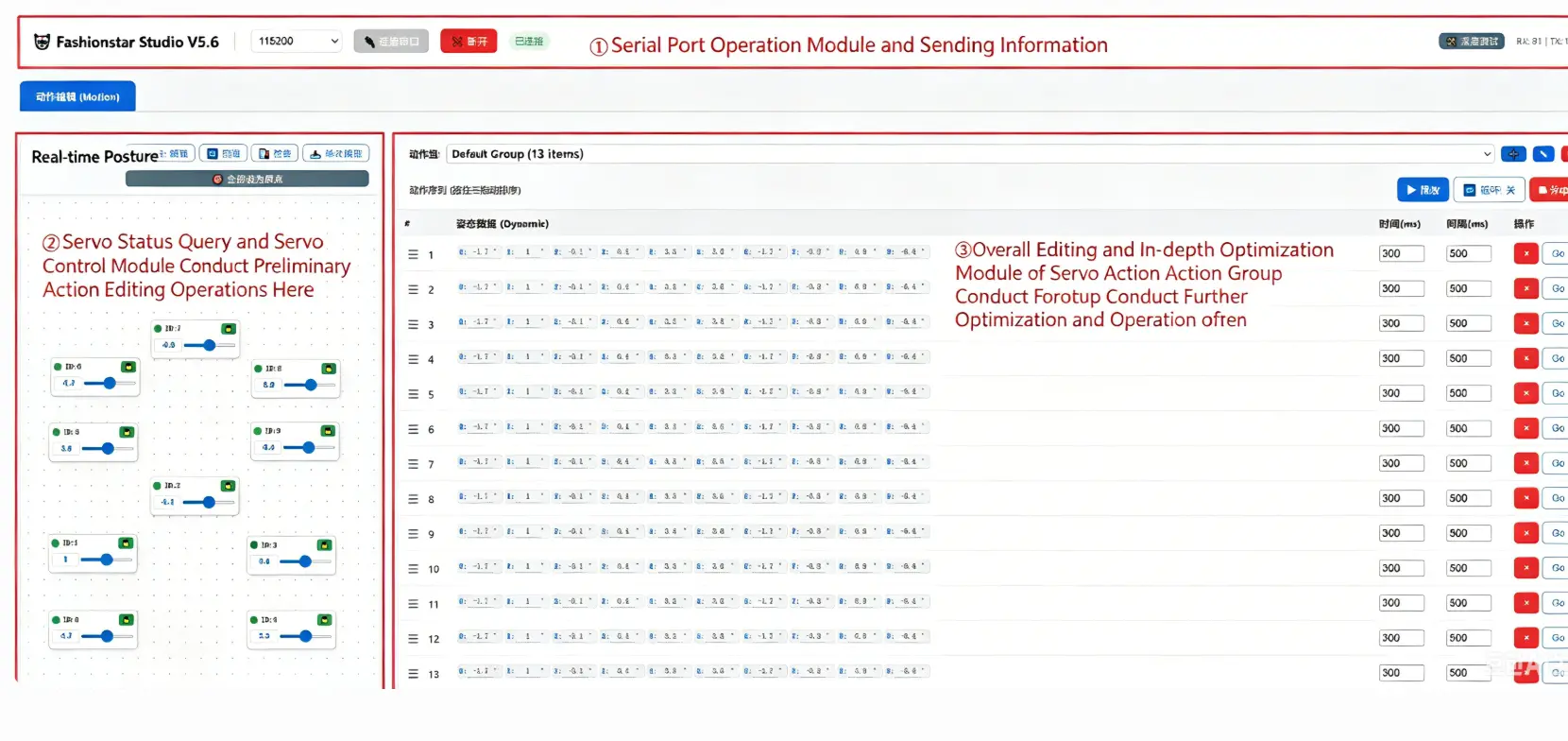
Layout do editor
Três módulos principais:
- Conexão/desconexão da porta serial e status de mensagens
- Consulta e controle de status/ângulo dos servos
- Otimização de grupo de movimentos e importação/exportação
Referência de controle
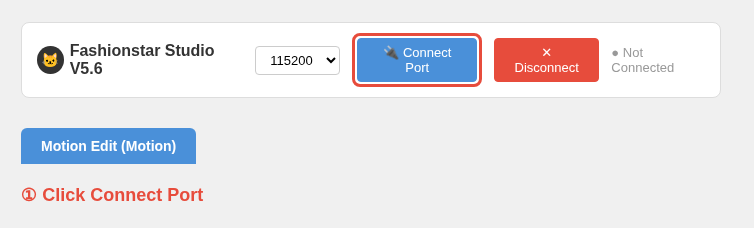
Conectar / desconectar porta serial

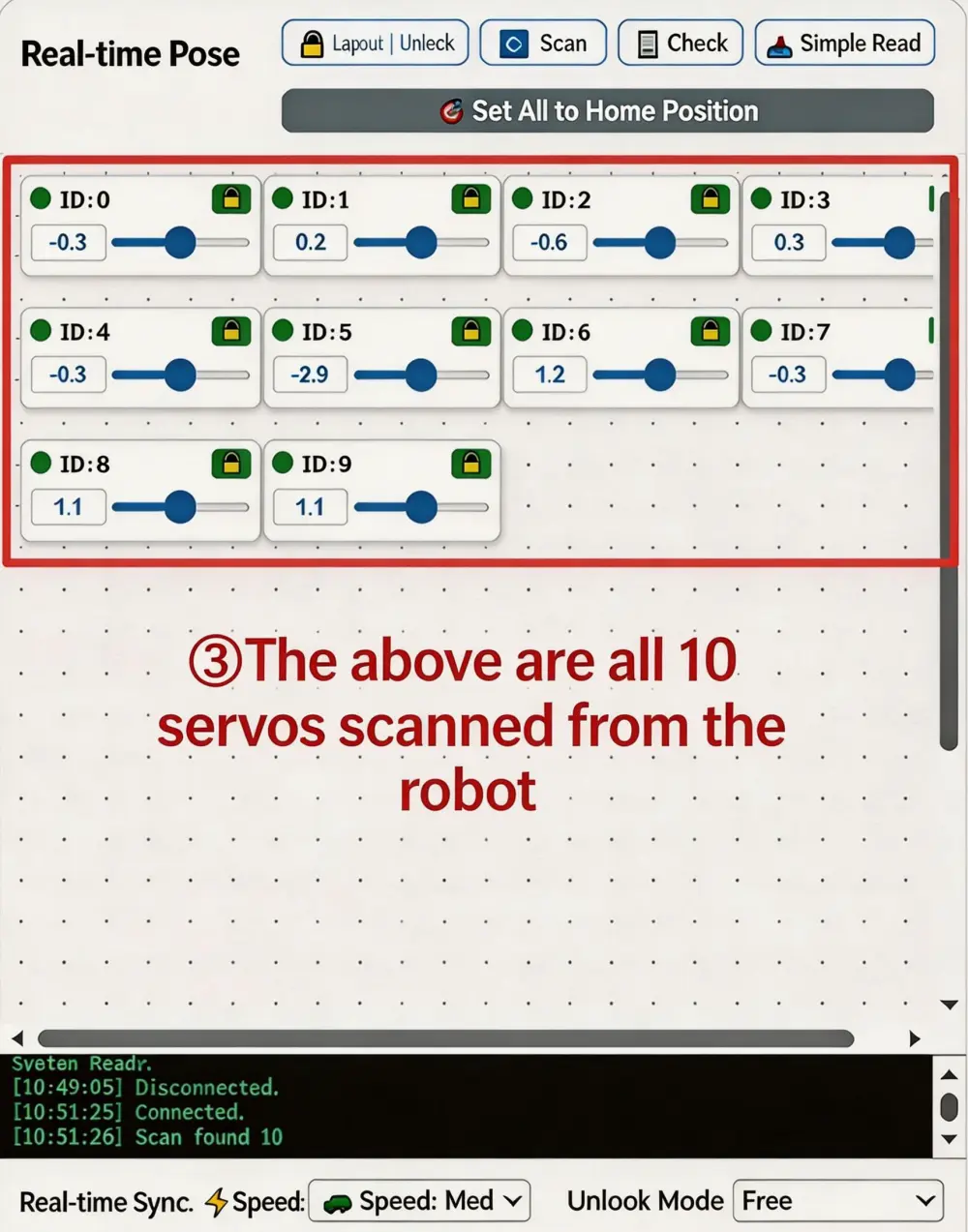
Página de pose em tempo real
- Layout: Arraste cada controle de servo na tela para organizar as partes do robô; os IDs correspondem um a um; clique para bloquear o layout.
- Scan: Escaneie novamente todos os servos online.
- Check: Proteção contra sobretensão/subtensão, travamento e outros estados anormais.
- Read Once: Leia o ângulo atual uma vez.
- Status Color: Verde = controle de ângulo; Vermelho = liberado / amortecimento.

Controle de ângulo por arraste:
- Leitura em tempo real: Leia continuamente os ângulos dos servos.
- Velocidade: Limite a velocidade durante o arraste para evitar movimentos excessivos.
- Modo de desbloqueio: Libere os servos para ensino (liberação com desligamento / liberação em amortecimento).

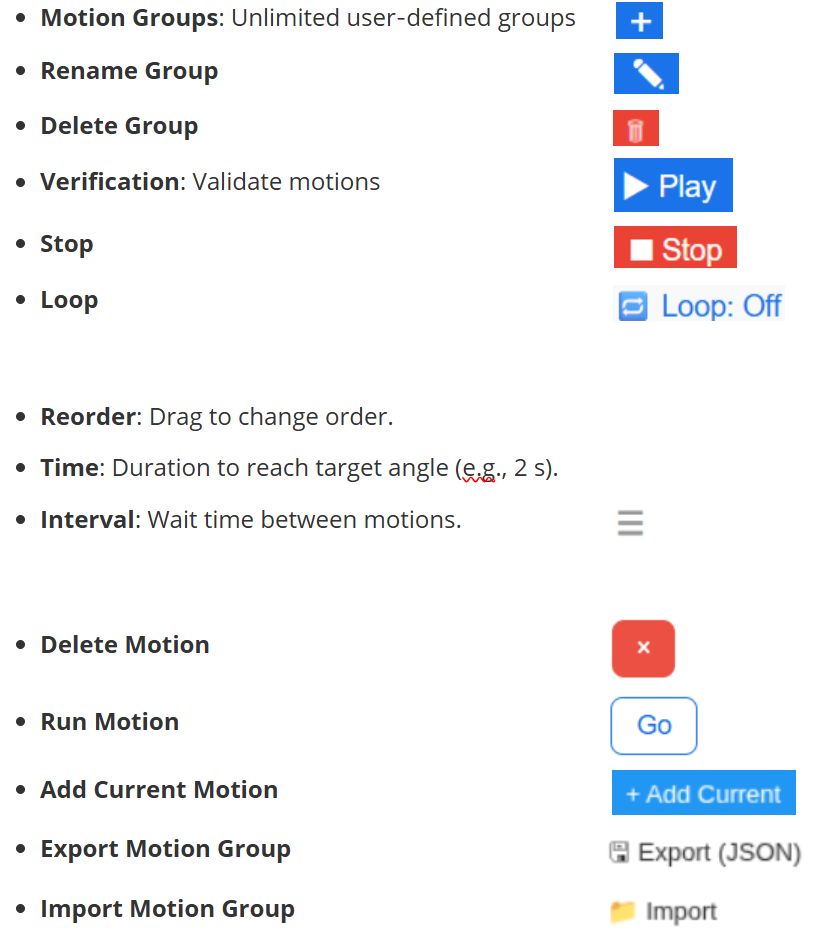
Página de grupo de movimentos
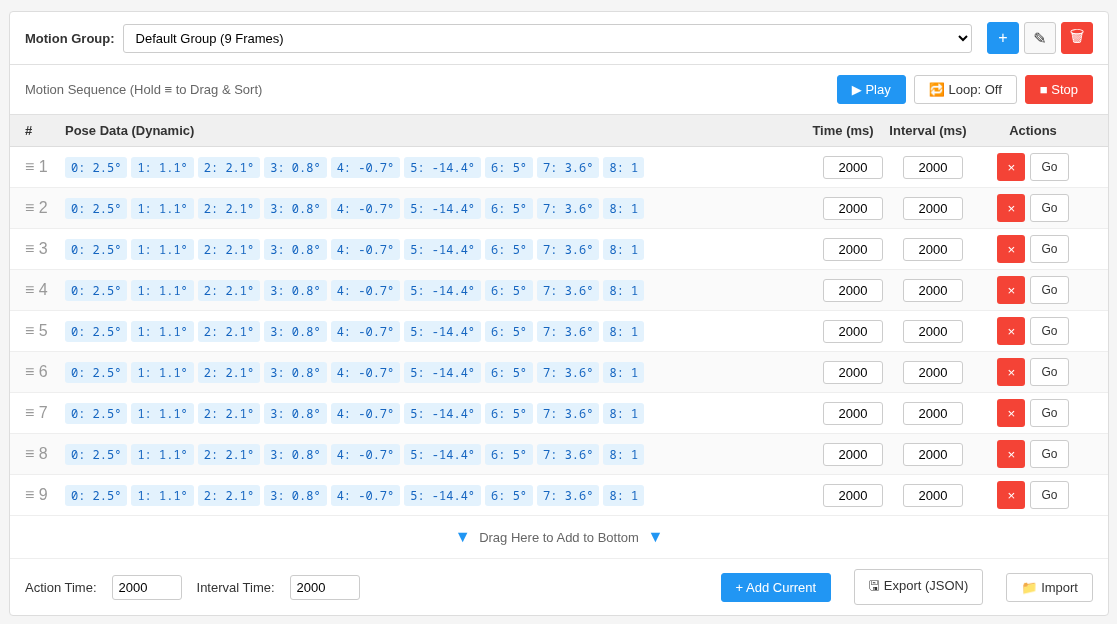
A seguir é apresentada a explicação de cada botão:
Do editor ao movimento offline (XIAO ESP32S3 Sense)
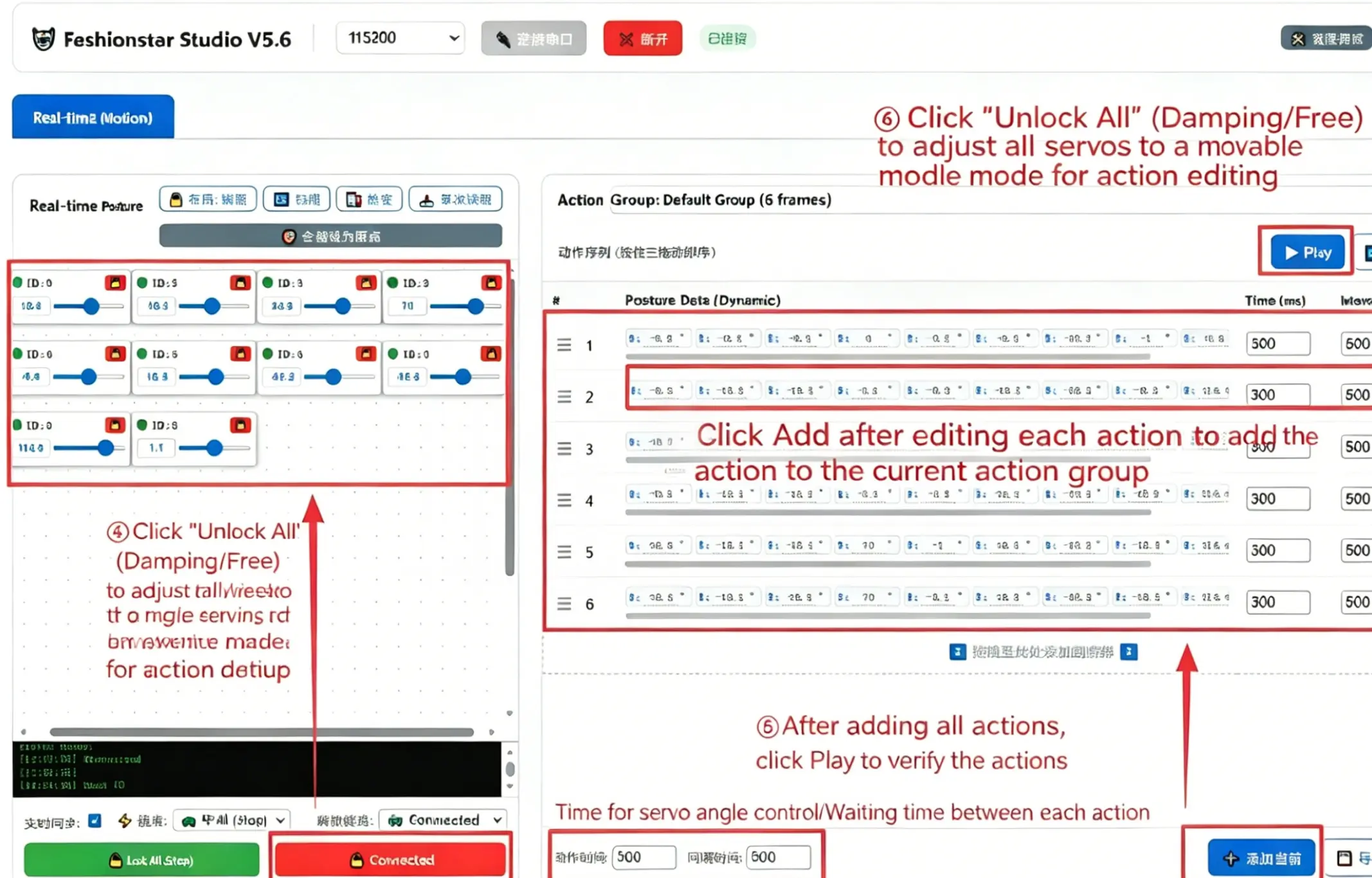
- 1. Clique em "Connect" para abrir a porta serial.
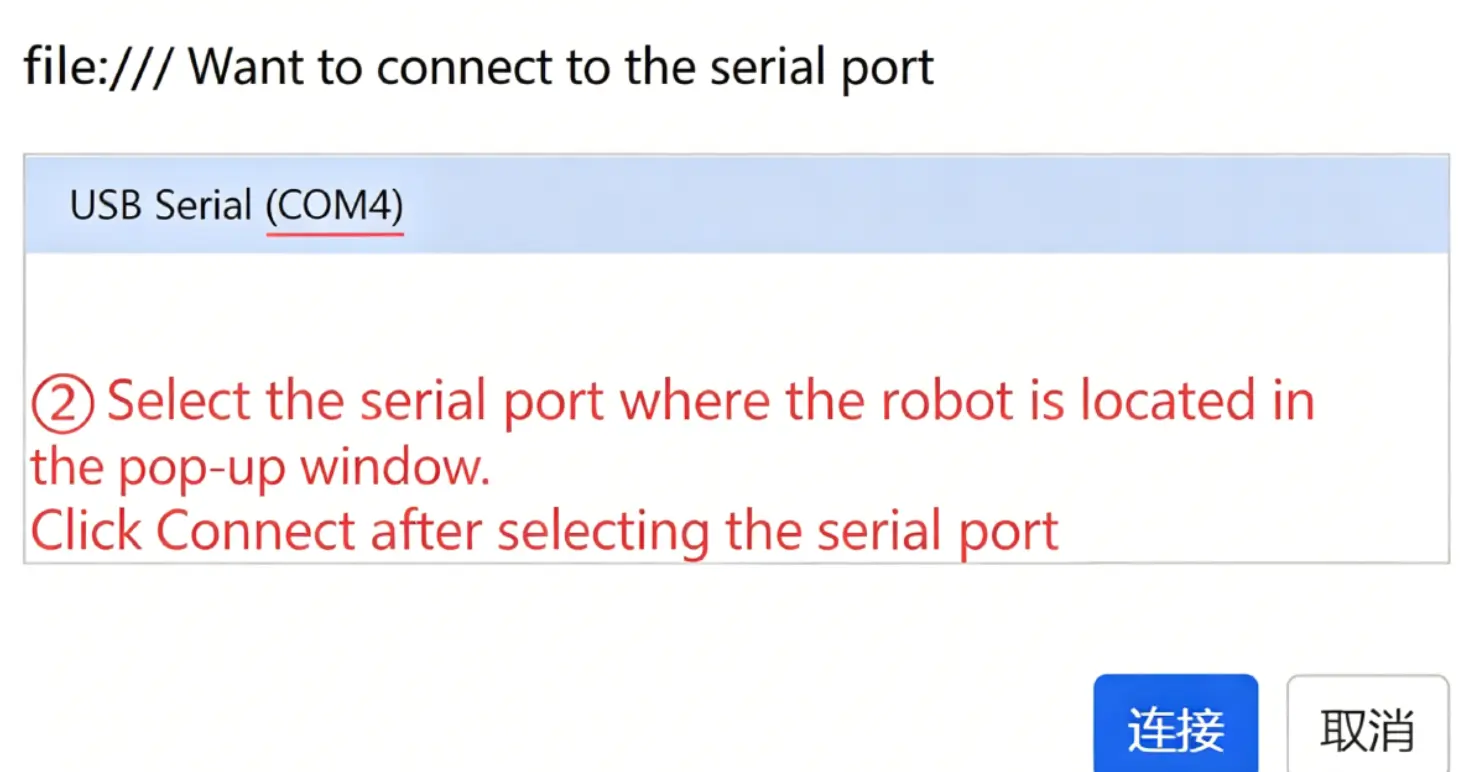
- 2. Selecione a porta serial de destino.
- 3. Escaneie todos os servos do robô.
- 4. Clique em "Release All" para desenergizar todos os servos para posicionamento manual ou desbloqueie apenas os servos de que você precisa.
- 5. Defina "Time" e "Interval".
- 6. Após cada edição, clique em "Add Current" para adicioná-la ao grupo.
- 7. Reproduza para verificar.
Nota
Cada quadro de movimento pode ser editado individualmente (ângulo, tempo, intervalo) e verificado.
- 8. Clique em "Export (JSON)" para exportar o grupo de movimentos.
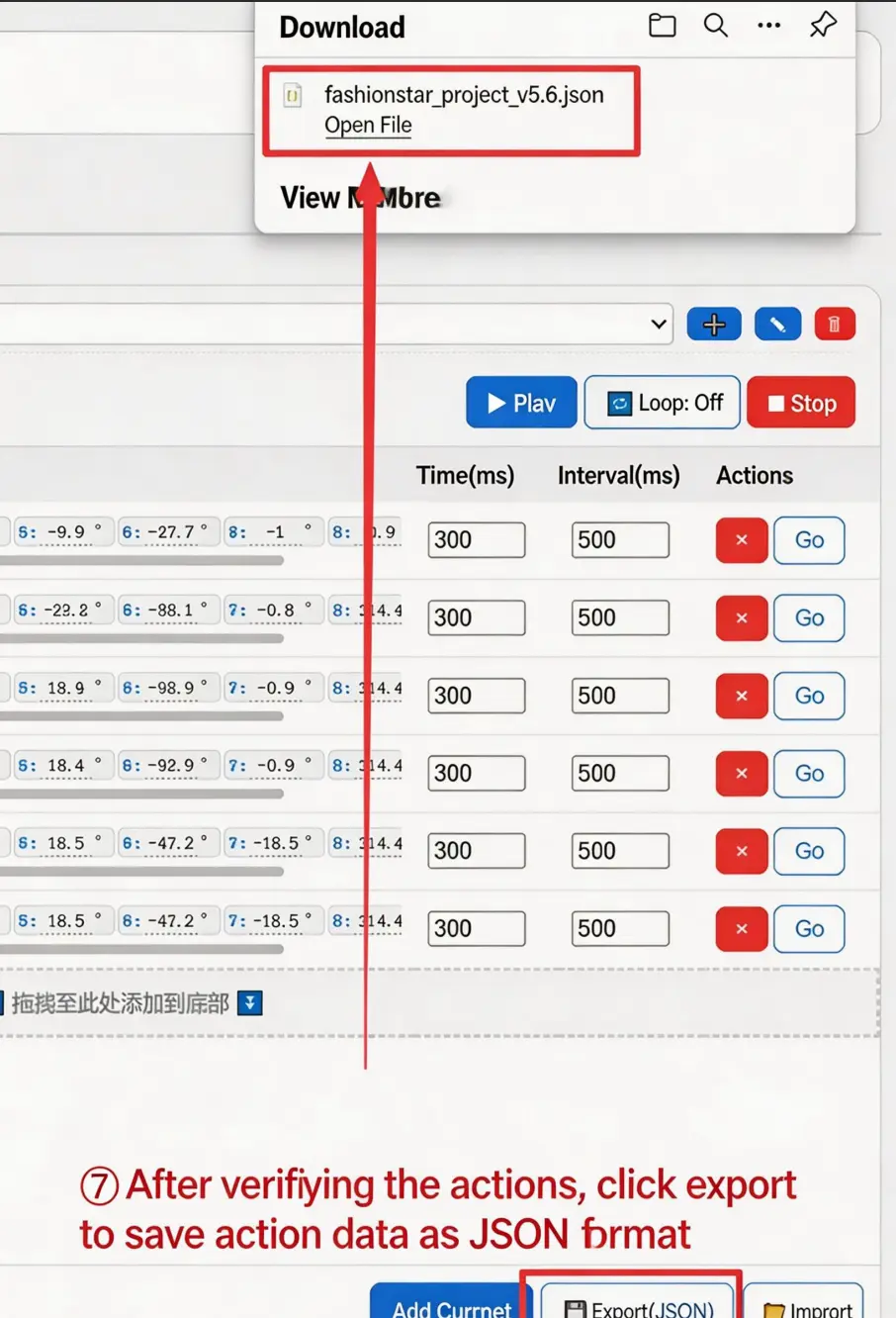
- 9. Abra o JSON exportado e copie o conteúdo de
frames(incluindo os[]externos).
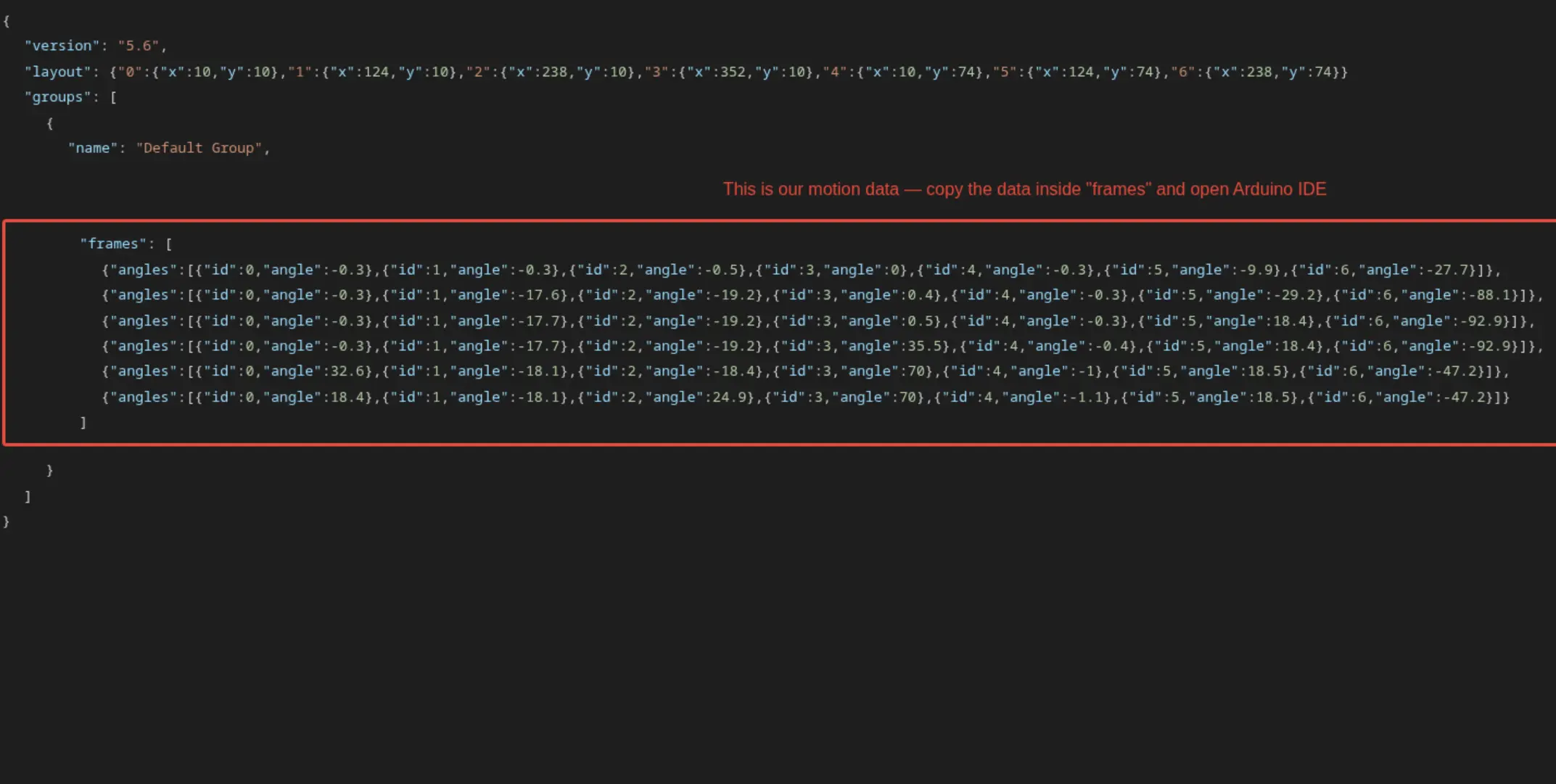
- 10. Substitua o
jsonDatano programa pelo conteúdo copiado; após compilar e gravar, o robô pode ser controlado via gamepad Bluetooth (consulte "Parâmetros de controle do robô" para detalhes).
Parâmetros de controle do robô (ajuste conforme necessário)
Valores padrão
BAUDRATE: Taxa de transmissão UART.SERVO_NUM: Número de servos.
#define BAUDRATE 115200 /* Baud rate */
#define SERVO_NUM 10 /* Total number of servos */
Bluetooth (se usado)
BLE_NAME: Nome do gamepad.BLE_UUID: UUID do gamepad.
/* Bluetooth settings -- modify according to actual conditions */
#define BLE_NAME "LOOKBON" /* Bluetooth name */
#define BLE_UUID "AE02" /* ID for Bluetooth data reception */
Controle remoto Web (se usado)
SERVICE_UUID: ID do serviço.CHARACTERSTIC_UUID: ID da característica.
/* ESP32 Service UUID and Characteristic UUID */
#define SERVICE_UUID "4fafc201-1fb5-459e-8fcc-c5c9c331914b"
#define CHARACTERISTIC_UUID "beb5483e-36e1-4688-b7f5-ea07361b26a8"
Modo de ensino
MAX_ACTIONNUM: Número máximo de quadros de movimento permitidos no modo de ensino.Default_RobotRunSpeed_Demonstration: Velocidade padrão de execução.MIN_RobotRunSpeed_Demonstration: Velocidade mínima de execução.MAX_RobotRunSpeed_Demonstration: Velocidade máxima de execução.Adjust_RobotRunSpeed_Step: Valor do passo de ajuste de velocidade no modo de ensino (±200 por passo).
#define MAX_ACTIONNUM 100 /* Maximum number of teaching motion frames */
#define Default_RobotRunSpeed_Demonstration 1000 /* "Default" teaching run speed */
#define MIN_RobotRunSpeed_Demonstration 5000 /* "Slowest" teaching run speed */
#define MAX_RobotRunSpeed_Demonstration 500 /* "Fastest" teaching run speed */
#define Adjust_RobotRunSpeed_Step 200 /* Step value for adjusting teaching run speed */
Campos de dados (personalize conforme necessário)
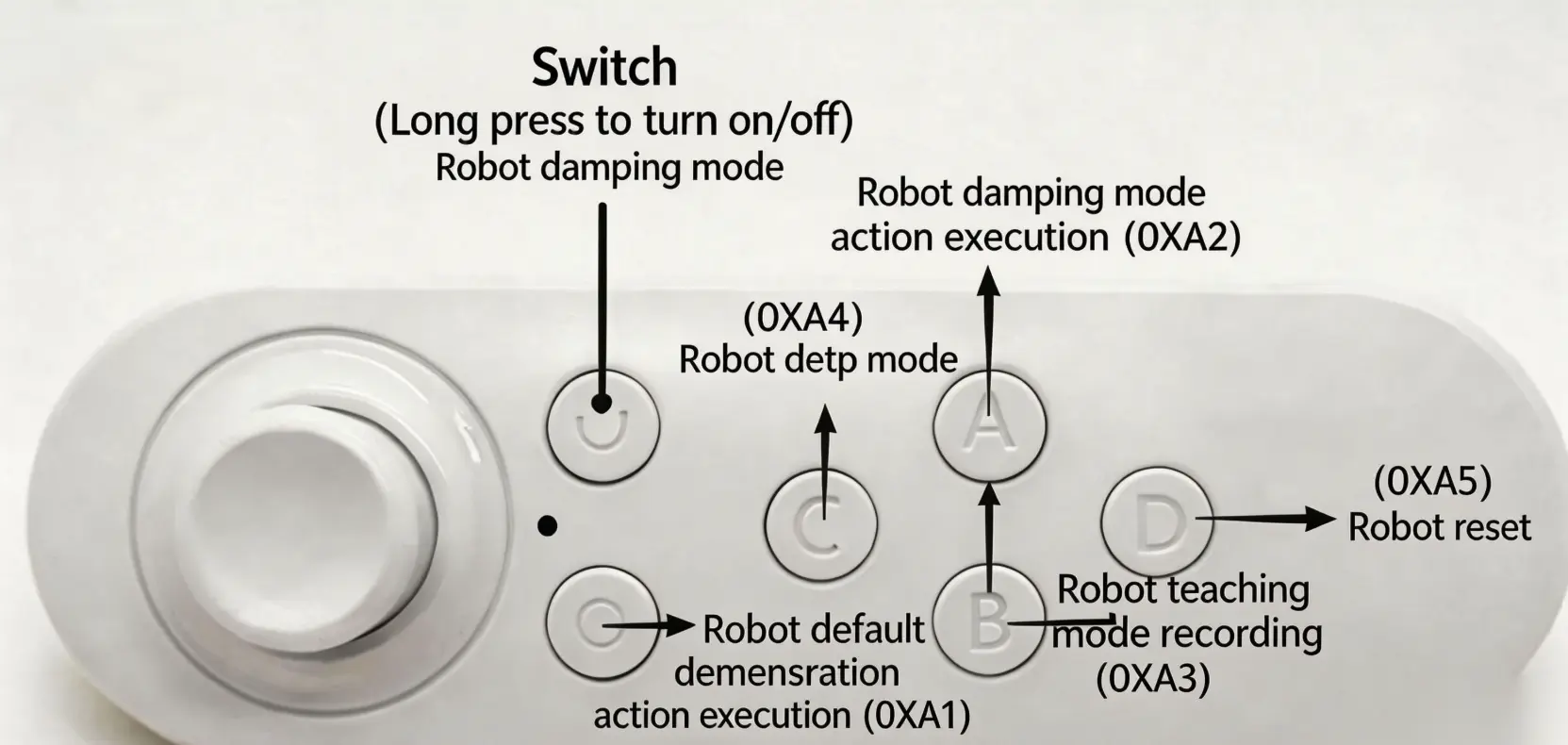
RemoteControl_DefaultDemoAction: Movimento de demonstração padrão (exportado do editor).RemoteControl_Exe: Comando de execução do modo de ensino.RemoteControl_Record: Comando de gravação do modo de ensino.RemoteControl_Damping: Comando de modo de amortecimento.RemoteControl_Reset: Comando de reset.RemoteControl_ReduceRunSpeed: Diminuir a velocidade de execução no modo de ensino.RemoteControl_AddRunSpeed: Aumentar a velocidade de execução no modo de ensino.
Observação sobre Bluetooth: Os dados reais do controlador dependem do seu dispositivo; defina os botões no código conforme necessário.
/* Bluetooth remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
#define RemoteControl_DefaultDemoAction 0xA1 /* Default demonstration motion */
#define RemoteControl_Exe 0xA2 /* Teaching mode execution command */
#define RemoteControl_Record 0xA3 /* Record motion command */
#define RemoteControl_Damping 0xA4 /* Damping mode command */
#define RemoteControl_Reset 0xA5 /* Robot reset command */
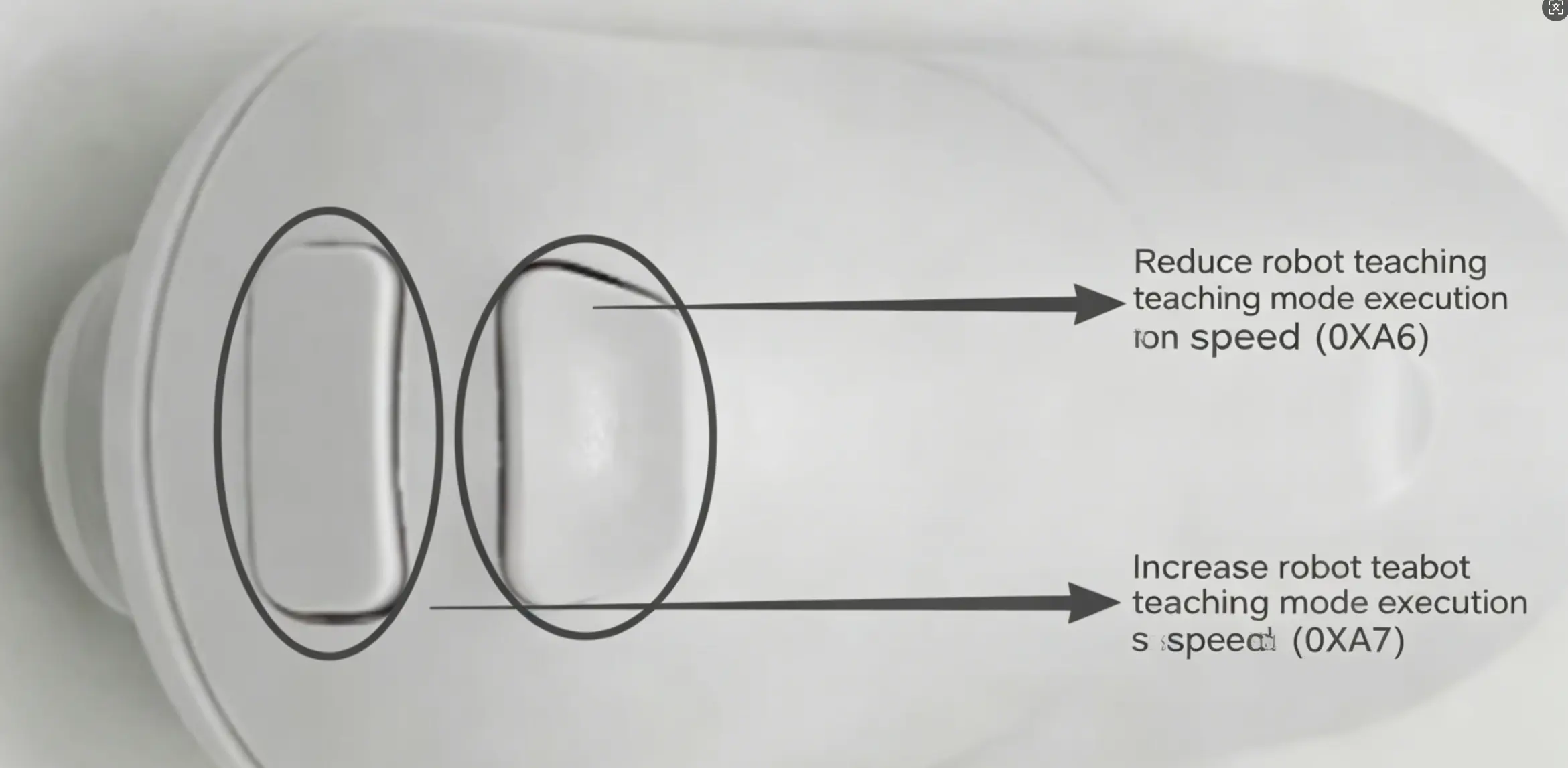
#define RemoteControl_ReduceRunSpeed 0xA6 /* Decrease teaching run speed */
#define RemoteControl_AddRunSpeed 0xA7 /* Increase teaching run speed */
Observação sobre o controle remoto via Web: da mesma forma, confirme os dados e o mapeamento dos botões antes da integração.
/* Web remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
#define RemoteControl_DefaultDemoAction 0x10 /* Default demonstration motion */
#define RemoteControl_Exe 0x08 /* Teaching mode execution command */
#define RemoteControl_Record 0x04 /* Record motion command */
#define RemoteControl_ReduceRunSpeed 0x02 /* Decrease teaching run speed */
#define RemoteControl_AddRunSpeed 0x01 /* Increase teaching run speed */
#define RemoteControl_Damping 0x04 /* Damping mode command */
#define RemoteControl_Reset 0x08 /* Robot reset command */
Resetar Ângulos
ROBOT_RESET_POSITION_0~ROBOT_RESET_POSITION_9: Posições zero para os IDs de servo 0–9 (pose de reset do robô).
Observação: modifique estes valores de acordo com a pose de reset do seu robô.
/* Robot reset angle settings -- modify according to actual conditions */
constexpr float ROBOT_RESET_POSITION_0 = 0;
constexpr float ROBOT_RESET_POSITION_1 = 0;
constexpr float ROBOT_RESET_POSITION_2 = 0;
constexpr float ROBOT_RESET_POSITION_3 = 0;
constexpr float ROBOT_RESET_POSITION_4 = 0;
constexpr float ROBOT_RESET_POSITION_5 = 0;
constexpr float ROBOT_RESET_POSITION_6 = 0;
constexpr float ROBOT_RESET_POSITION_7 = 0;
constexpr float ROBOT_RESET_POSITION_8 = 0;
constexpr float ROBOT_RESET_POSITION_9 = 0;
Referência de Controle Remoto
Gamepad Bluetooth
- Pressione e segure o botão de energia do gamepad para ligá-lo e pareá-lo com o MCU (XIAO_ESP32S3).
- Após o pareamento bem-sucedido, o robô fará uma reverência e resetará.
Funções de movimento:
- "Run Motion": Executa o movimento integrado.
- "Reset Robot": Retorna à pose de reset.
- "Damping Mode": Entra no estado de ensino, no qual as juntas podem ser movidas livremente.
- "Record Teaching Motion": Grava o movimento atual.
- "Execute Teaching Motion": Executa o movimento gravado (não é limpo por padrão).
- "Decrease Teaching Speed": Diminui a velocidade de execução (o servo do braço direito ID 6 oscila para indicar a velocidade).
- "Increase Teaching Speed": Aumenta a velocidade de execução (o servo do braço direito ID 6 oscila para indicar a velocidade).
10. Guia de Gravação do Firmware do Controlador Principal Padrão (Baseado no Seeed Studio XIAO ESP32S3)
Esta seção se aplica apenas ao ambiente padrão do controlador principal XIAO ESP32S3. Se o seu projeto usar STM32 ou Raspberry Pi, consulte diretamente o SDK de Controle de Servo Fashionstar multiplataforma no apêndice.
Configuração do Ambiente de Desenvolvimento (Arduino IDE)
Baixe e instale a versão mais recente do Arduino IDE no site oficial do Arduino; recomenda-se o Arduino IDE 2.x.
Importando o Pacote de Suporte de Hardware ESP32
Primeiro, abra as Preferências do Arduino IDE:
- Windows:
File > Preferences - macOS:
Arduino IDE > Settings...ouPreferences...
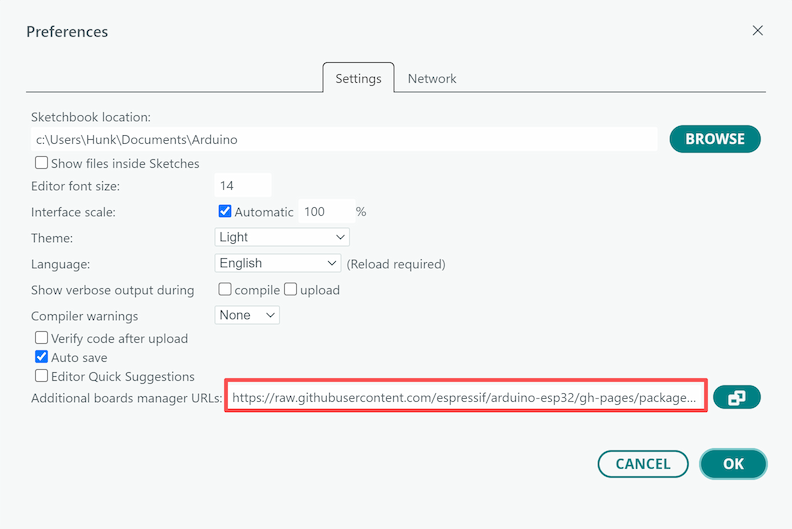
Insira a seguinte URL em "Additional Boards Manager URLs":
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
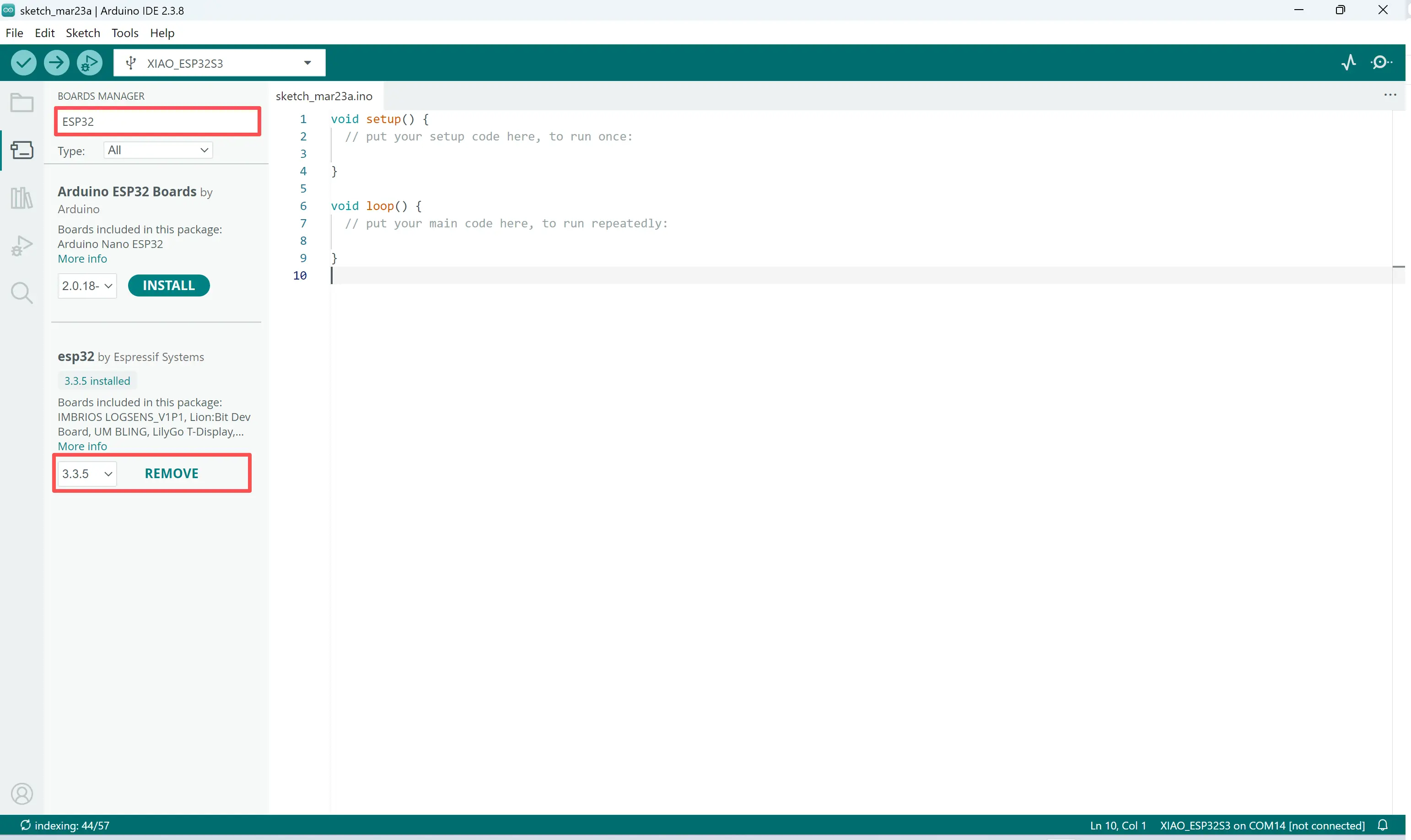
Implantando o Ambiente de Build do ESP32 (Requisito Rigoroso de Versão)
- Abra
Tools > Board > Boards Manager - Pesquise por
esp32 - Localize o pacote fornecido por
Espressif Systems - Selecione manualmente e instale a versão 3.3.5
Não instale diretamente a versão mais recente. A combinação atual de Bluetooth e driver de barramento do projeto requer a versão 3.3.5; caso contrário, o Bluetooth ou a comunicação de barramento pode falhar na compilação ou funcionar de forma anormal.
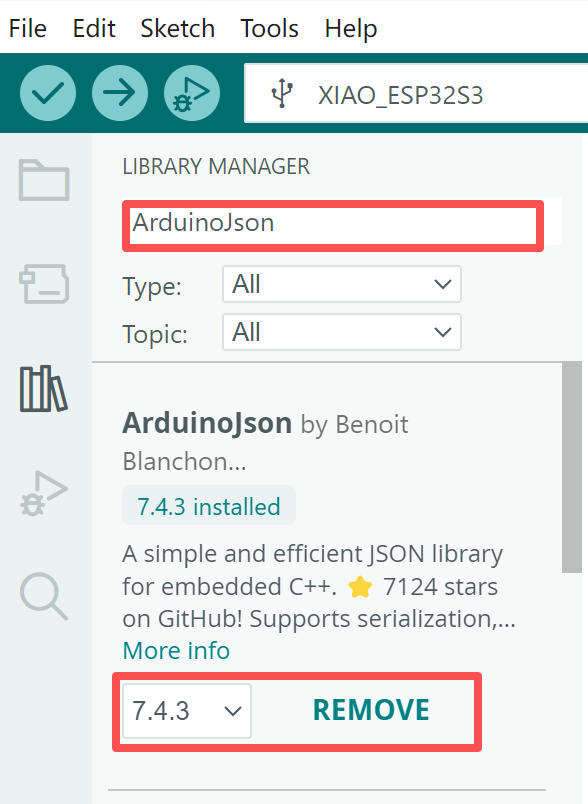
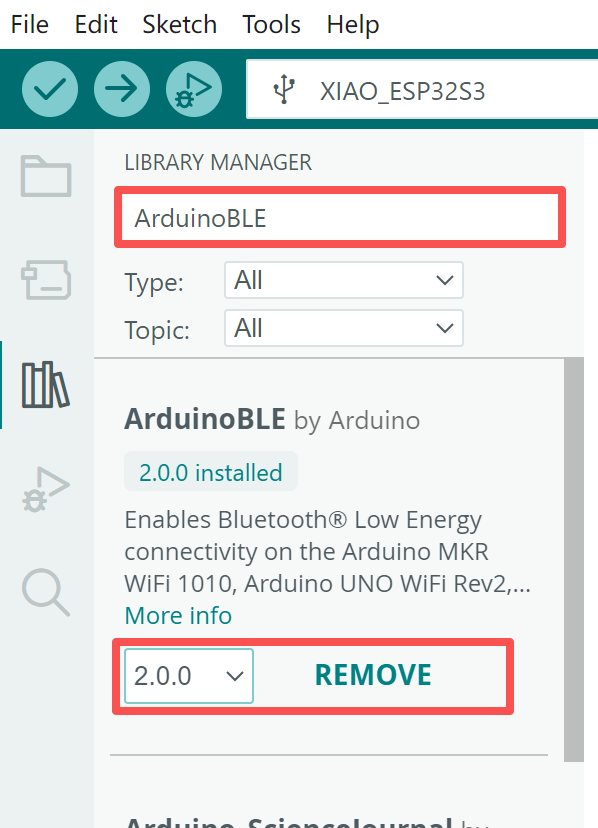
Instalando as Bibliotecas Necessárias (ArduinoJson e ArduinoBLE)
O sistema depende das seguintes bibliotecas de terceiros para análise JSON e serviços Bluetooth:
ArduinoJsonArduinoBLE
Método de instalação:
- Abra
Sketch > Include Library > Manage Libraries... - Pesquise e instale
ArduinoJson - Pesquise e instale
ArduinoBLE
Implantando o SDK do Driver Central de Servo Fashion Star
Para garantir a chamada correta do driver de baixo nível, o SDK oficial deve ser instalado manualmente:
- Localize
fashionstar-uart-servo-arduino-sdk-V2.rarno pacote de materiais incluído - Extraia o arquivo compactado
- Copie toda a pasta do SDK para o diretório padrão de bibliotecas do Arduino
Caminho Padrão das Bibliotecas:
- Windows:
C:\Users\Username\Documents\Arduino\libraries - macOS:
~/Documents/Arduino/libraries
Após copiar, feche completamente e reabra o Arduino IDE para que ele recarregue as bibliotecas locais.
Selecionando a Placa e Compilando / Gravando
- Conecte o XIAO ESP32S3 ao computador com um cabo de dados Type-C
- Abra
Tools > Board > esp32e selecioneXIAO_ESP32S3 - Abra
Tools > Porte selecione a porta correspondente à placa controladora principal
Os nomes das portas normalmente aparecem como:
- Windows:
COM3,COM5, etc. - macOS:
/dev/cu.usbmodem...ou/dev/cu.usbserial...
Por fim, abra o código-fonte do projeto (.ino) no Arduino IDE, clique no botão Upload no canto superior esquerdo e aguarde o console exibir "Upload successful".
11. Especificação de Configuração de Parâmetros de Controle de Baixo Nível (Baseada no Controlador Principal Padrão Seeed Studio XIAO ESP32S3)
Após abrir o código-fonte do projeto no Arduino IDE, as seguintes definições de macro e constantes podem ser modificadas de acordo com os requisitos reais do projeto. Confirme o arquivo em que cada parâmetro está localizado para evitar alterações acidentais.
Parâmetros Básicos de Hardware
Localizado em Control.h
BAUDRATE: Taxa de baud serial para comunicação entre o controlador principal e o RUC-01SERVO_NUM: Número total de servos do robô
/* User-modifiable robot data area */
/* define */
#define BAUDRATE 115200 /* Baud rate */
#define SERVO_NUM 10 /* Total number of servos */
Remapeamento de Pinos Físicos UART
Localizado em Robot.ino
TX_PIN/RX_PIN: Pinos seriais usados para comunicação entre o ESP32S3 e a placa adaptadora RUC-01
/* Serial1 -- GPIO D6 = GPIO43 D7 = GPIO44 */
#define TX_PIN 43
#define RX_PIN 44
Parâmetros de Comunicação Bluetooth do Controle Remoto Web
Localizado em Robot.ino e Control.h
BLE_NAME: Nome de broadcast BluetoothSERVICE_UUID/CHARACTERISTIC_UUID: UUID de serviço e UUID de característica dos quais o controle remoto web e o controlador principal dependem para estabelecer comunicação
/* Set Bluetooth name */
BLE.setLocalName("ESP32_Pro_Remote");
/* ESP32 Service UUID and Characteristic UUID */
#define SERVICE_UUID "4fafc201-1fb5-459e-8fcc-c5c9c331914b"
#define CHARACTERISTIC_UUID "beb5483e-36e1-4688-b7f5-ea07361b26a8"
Referência de Parâmetros do Modo de Ensino
Localizado em Control.h
MAX_ACTIONNUM: Número máximo de quadros de movimento graváveis no modo de ensinoDefault_RobotRunSpeed_Demonstration: Velocidade de execução padrãoMIN / MAX_RobotRunSpeed_Demonstration: Limites superior e inferior para ajuste de velocidadeAdjust_RobotRunSpeed_Step: Valor de passo para cada aumento ou diminuição de velocidade
#define MAX_ACTIONNUM 100 /* Maximum number of teaching motion frames */
#define Default_RobotRunSpeed_Demonstration 1000 /* "Default" teaching run speed */
#define MIN_RobotRunSpeed_Demonstration 5000 /* "Slowest" teaching run speed */
#define MAX_RobotRunSpeed_Demonstration 500 /* "Fastest" teaching run speed */
#define Adjust_RobotRunSpeed_Step 200 /* Step value for adjusting teaching run speed */
Definições de Macros de Dados de Botões e Comandos
Localizado em Control.h
Na comunicação remota sem fio, o controle remoto web empacota os estados dos botões em duas variáveis independentes:
btn_Main: Botões da área principal de operaçãobtn_border: Botões da área de controle do sistema
Portanto, alguns comandos hexadecimais podem aparecer em ambas as áreas, mas correspondem a variáveis diferentes e não entrarão em conflito.
/* Bluetooth remote control commands -- modify functions according to different commands -- adjust based on actual conditions */
/* The following commands correspond to btn_Main (red hexadecimal labels in the mapping diagram) */
#define RemoteControl_DefaultDemoAction 0x10 /* Default demonstration motion command (Square button) */
#define RemoteControl_Exe 0x08 /* Teaching mode execution command (D-pad Right) */
#define RemoteControl_Record 0x04 /* Record motion frame command (D-pad Left) */
#define RemoteControl_ReduceRunSpeed 0x02 /* Decrease teaching run speed (D-pad Down) */
#define RemoteControl_AddRunSpeed 0x01 /* Increase teaching run speed (D-pad Up) */
/* The following commands correspond to btn_border (yellow hexadecimal labels in the mapping diagram) */
#define RemoteControl_Damping 0x04 /* Damping / release mode command (RELAX button) */
#define RemoteControl_Reset 0x08 /* Robot reset command (HOME button) */
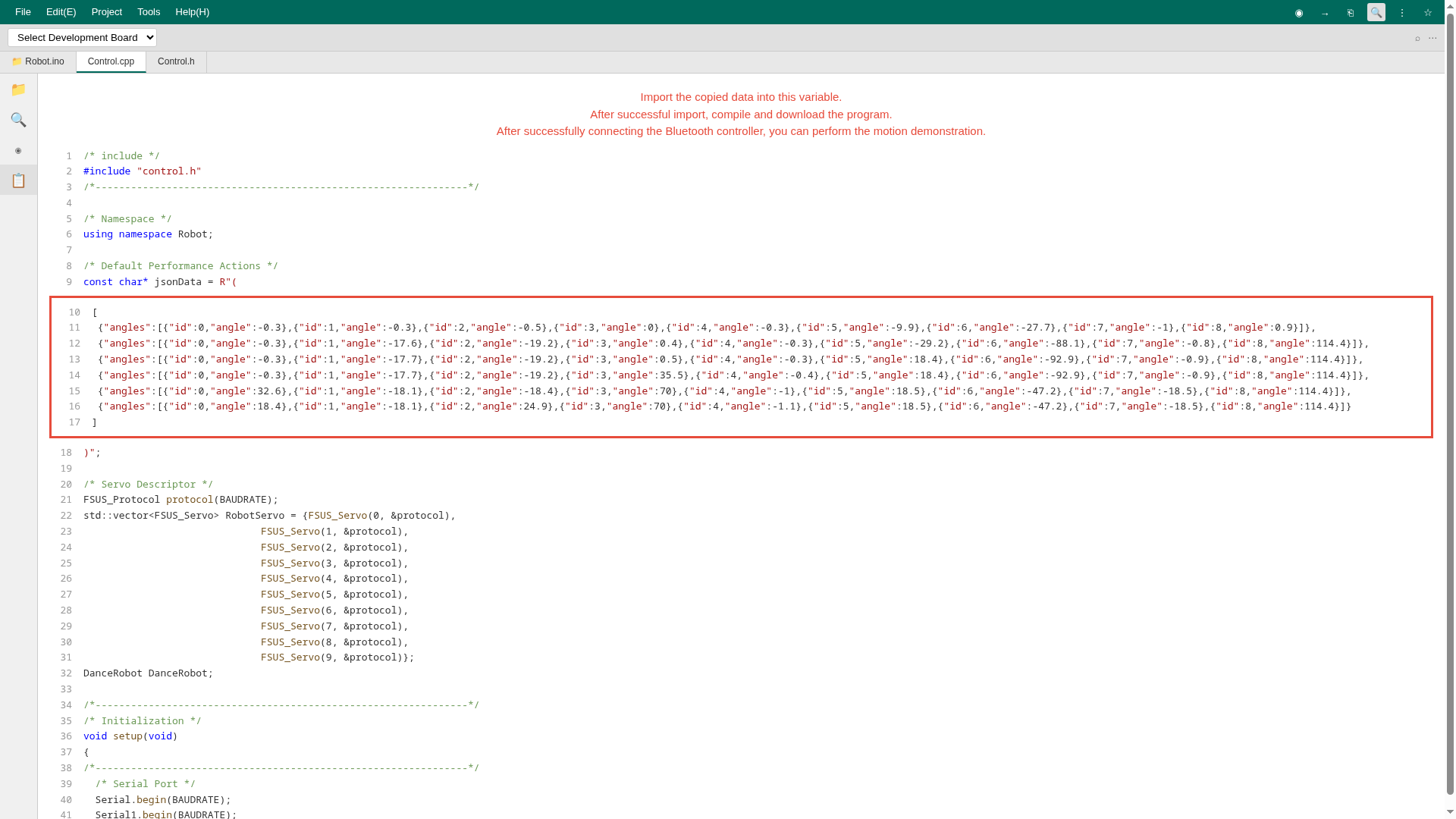
Área de Montagem de Dados de Grupo de Movimentos
Localizado em Robot.ino
Copie os dados .json exportados do editor de movimentos para a variável jsonData, mantendo o R( e );`:
/* Default demonstration motion */
const char* jsonData = R"(
[
// Paste the JSON data exported from the motion editor here, completely replacing this section
{"angles":[{"id":0,"angle":0},{"id":1,"angle":0} ... ],"time":2000,"delay":500}
]
)";
Tamanho da Alocação do Buffer JSON
Localizado em Control.cpp
Se a sequência de movimento for muito longa, isso pode causar memória de execução insuficiente ou falha na análise do JSON. Nesse caso, a capacidade de DynamicJsonDocument pode ser aumentada adequadamente:
/* Create a JSON document object with sufficient space allocated */
DynamicJsonDocument doc(4096);
Aumente para 8192 ou mais, conforme necessário, dependendo da complexidade do movimento.
Parâmetros de Ângulo de Reset do Robô e Compensação de Ponto Zero
Localizado em Control.h
ROBOT_RESET_POSITION_0 ~ 9: Correspondem aos ângulos iniciais de zero dos Servos com IDs de 0 a 9, respectivamente
Devido às tolerâncias de montagem mecânica, a posição zero absoluta de cada robô pode variar ligeiramente. Recomenda-se ajustar e compensar finamente esses parâmetros após verificar a postura em pé do robô.
/* Robot reset angle settings -- modify according to actual conditions */
constexpr float ROBOT_RESET_POSITION_0 = 0;
constexpr float ROBOT_RESET_POSITION_1 = 0;
constexpr float ROBOT_RESET_POSITION_2 = 0;
constexpr float ROBOT_RESET_POSITION_3 = 0;
constexpr float ROBOT_RESET_POSITION_4 = 0;
constexpr float ROBOT_RESET_POSITION_5 = 0;
constexpr float ROBOT_RESET_POSITION_6 = 90;
constexpr float ROBOT_RESET_POSITION_7 = 0;
constexpr float ROBOT_RESET_POSITION_8 = -90;
constexpr float ROBOT_RESET_POSITION_9 = 0;
12. Dicionário de Funções do Terminal Web Remoto e Mapeamento de Baixo Nível
Para compatibilidade de navegador e etapas básicas de pareamento Bluetooth, consulte primeiro o Capítulo 2 deste documento. Este capítulo explica principalmente o layout dos botões na interface de controle e as relações de mapeamento em hexadecimal de baixo nível, para facilitar o desenvolvimento secundário posterior.
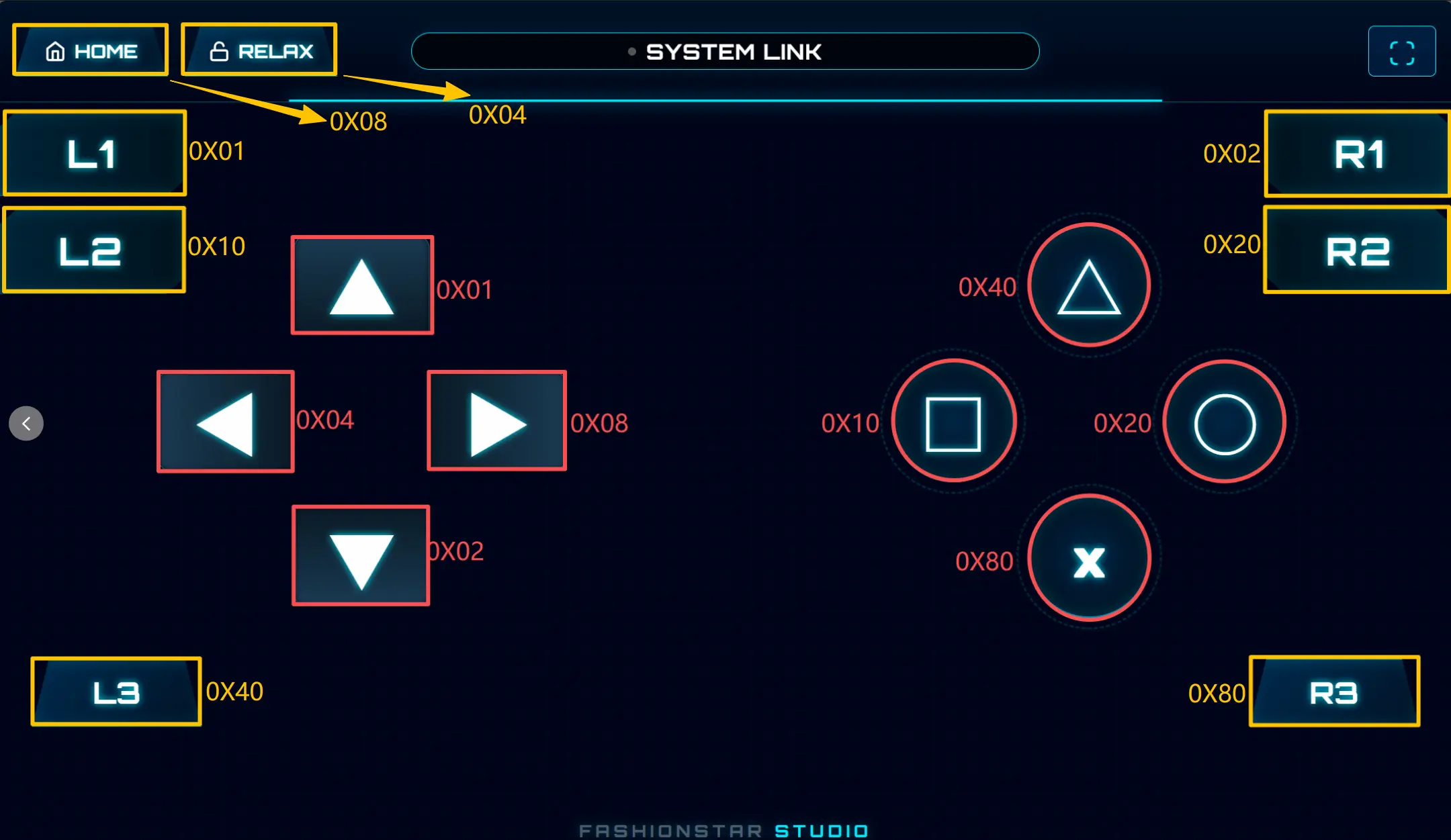
Área de Controle do Sistema
Variável de código correspondente: btn_border
Esta área está localizada principalmente na parte superior e nas bordas da interface, sendo usada para controlar o estado global do robô:
- HOME (
0x08): Interrompe o movimento atual, restaura o robô para a postura em pé padrão calibrada e limpa os dados de ensino atualmente na memória - RELAX (
0x04): Entra no modo de amortecimento / liberação, liberando o torque de sustentação de todos os servos para facilitar o ensino manual - Outros botões com rótulo amarelo: Como
L1,L2,R1,R2,L3,R3, etc. Estes não têm nenhum movimento atribuído no demo de fábrica atual e podem ser estendidos pelos desenvolvedores conforme necessário
Área Principal de Operação
Variável de código correspondente: btn_Main
A área principal de operação contém as teclas direcionais e as teclas de função do lado direito, sendo principalmente responsável pela coreografia e execução de movimentos:
- D-pad Esquerda ◀ (
0x04): Registra o quadro de movimento atual - D-pad Direita ▶ (
0x08): Reproduz a sequência de movimento atualmente gravada - D-pad Cima ▲ (
0x01): Aumenta a velocidade de execução - D-pad Baixo ▼ (
0x02): Diminui a velocidade de execução - Quadrado □ (
0x10): Executa o movimentojsonDatapadrão pré-armazenado na Flash do controlador principal - Outros botões com rótulo vermelho: Como
△,○,×, etc. Estes estão indefinidos no firmware atual e podem ser mapeados no código de baixo nível conforme necessário
FAQ
A página do site de origem está em construção; o conteúdo será adicionado quando estiver disponível.
Perguntas Frequentes
P1: Que bateria deve ser usada para o Atom-S?
R: Recomenda-se uma bateria Li-Po (polímero de lítio) padrão 2S ou 3S com conector XT60.
P2: Outro controlador principal pode substituir o XIAO ESP32-S3?
R: Este projeto é otimizado para o XIAO ESP32-S3, mas qualquer placa de desenvolvimento ESP32 com GPIO suficiente pode ser usada com apenas pequenas modificações.
P3: Como atualizo o firmware?
R: Conecte o XIAO ESP32-S3 ao seu computador via USB, abra o Arduino IDE ou PlatformIO e envie o novo programa.
P4: Onde está o editor de movimentos?
R: O editor de movimentos web pode ser acessado por meio de um navegador. Para operação detalhada, consulte o Capítulo 7.1.
Solução de Problemas Comuns
Gravação de Firmware Sem Resposta / Estado Travado
- Sintoma: O Arduino IDE informa
A fatal error occurred: Failed to connect, ou o processo de upload fica travado - Correção:
- Mantenha o cabo USB conectado
- Pressione e segure o botão BOOT na placa de desenvolvimento
- Clique no botão Upload no IDE
- Solte o botão BOOT quando o console mostrar
Connecting...ou começar a exibir o progresso da transferência
Terminal Web Não Consegue Enumerar Dispositivos Bluetooth
- Sintoma: Após clicar em "Find Device", a lista de dispositivos Bluetooth fica vazia
- Solução de problemas:
- Verifique se você está usando um navegador que suporta a
Web Bluetooth API - Usuários de Windows: confirme se a versão do SO é pelo menos Win10 (1703+)
- Usuários de macOS: verifiquem as configurações de "Privacidade e Segurança" do sistema para garantir que a permissão de Bluetooth do navegador esteja concedida
- Verifique se você está usando um navegador que suporta a
Articulações Fracas / Incapazes de Manter a Posição
- Sintoma: O firmware é executado normalmente e a comunicação é estabelecida, mas o robô não consegue suportar uma carga de forma eficaz
- Solução de problemas:
- Verifique se a capacidade de carga e descarga da bateria 3S é suficiente
- Verifique se a fiação do barramento está solta ou invertida
- Se os servos tiverem sido substituídos, confirme se todos os 10 IDs de servo (0–9) correspondem às definições do projeto para evitar conflitos de ID