Introdução ao uso do Atom-X
Introdução
Atom X é um kit de robô humanóide bípedo open-source com 17 graus de liberdade (DOF), projetado para desenvolvedores de robótica, makers e instituições educacionais. O robô é acionado por 17 servomotores de barramento Fashionstar RA8-U25H-M, apresentando uma estrutura totalmente impressa em 3D e de código aberto. Ele é equipado com um controlador principal Seeed Studio XIAO ESP32-S3 e uma placa de expansão Grove, com firmware de controle completo pré-instalado de fábrica. Seu editor visual de movimentos baseado na Web oferece depuração em tempo real via navegador, programação por ensino e exportação em JSON, facilitando o desenvolvimento secundário multiplataforma. A placa adaptadora RUC-01 incluída fornece alimentação regulada e interfaces UART, além de suportar controle remoto via Bluetooth/Web. Pronto para uso assim que sai da caixa, é uma plataforma ideal para verificação de algoritmos de movimento e desenvolvimento de robôs de mesa.

1. Introdução ao produto
- Configuração de DOF: 17 DOF no total, cobrindo juntas de braços, tronco e pernas.
- Estrutura e aparência: Estrutura totalmente impressa em 3D com arquivos de modelo STP/STL oficialmente open-source, facilitando a substituição de peças, o reforço estrutural e o redesenho externo.
- Atuadores das juntas: Servomotores de barramento Fashionstar RA8-U25H-M × 17 (suportam comunicação em barramento com fiação simplificada).
- Editor visual de movimentos via Web: Fornece uma plataforma de controle baseada em navegador que não requer instalação, suportando depuração em tempo real dos servos e programação em modo de ensino. Grupos de movimento concluídos podem ser exportados como arquivos no formato padrão
.jsonpara fácil análise e integração por vários controladores principais (como Arduino, STM32, Raspberry Pi). - Pronto para uso assim que sai da caixa: Pré-configurado com o Seeed Studio XIAO ESP32-S3 como controlador principal, com programas de demonstração de fábrica fornecidos.
- Expansão multi-módulo: Emparelhado com a placa de expansão Seeed Studio XIAO com interfaces Grove onboard para conexão de sensores/módulos controladores da série Seeed Grove.
- Expansibilidade do ecossistema: Por meio das interfaces Grove na placa de expansão Seeed Studio XIAO, sensores e módulos de controle do ecossistema Grove, como visão e percepção ambiental, podem ser integrados rapidamente.
- Compatibilidade multiplataforma: Para reduzir a barreira de desenvolvimento, fornecemos a placa adaptadora RUC-01 com saída de alimentação de 5V/3,3V onboard e interfaces UART. Qualquer controlador com funcionalidade de porta serial pode se comunicar com ela!
2. Especificações
| Parâmetro | Valor |
|---|---|
| Graus de liberdade (DOF) | 17 |
| Chassi | Impresso em 3D |
| Servomotores | Servomotores de barramento RA8-U25H-M |
| Placa de interface de alimentação dos servos | RUC-01 fornece 4 interfaces de servo, alimentação de 5V/3,3V para a placa de controle, interface de comunicação serial (interface Grove) |
| Controlador principal | Seeedstudio XIAO ESP32-S3 + Placa de expansão Seeed Studio XIAO |
| Protocolo de comunicação | Comunicação serial assíncrona (UART) |
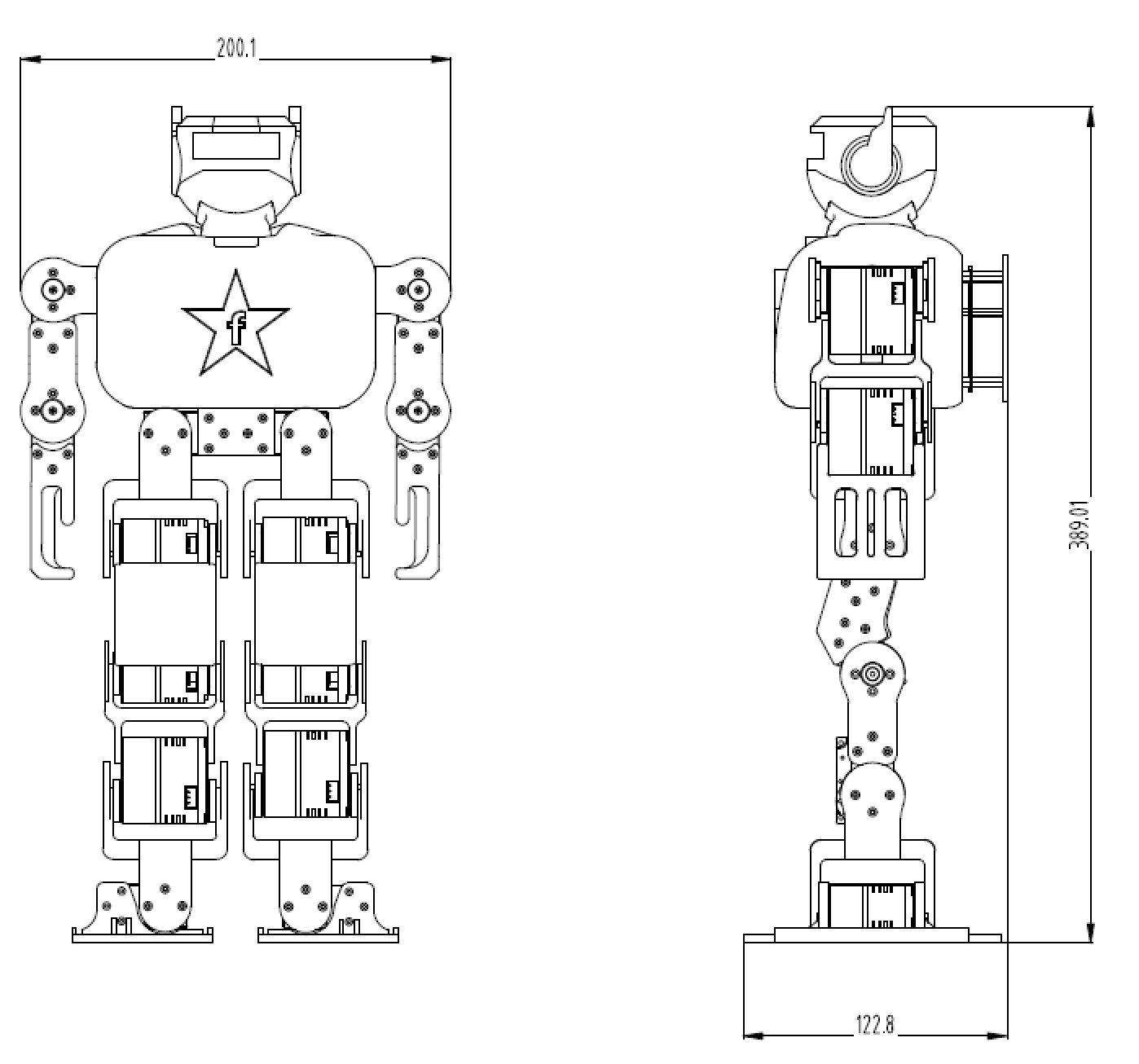
| Dimensões | 200×122×389 mm |
3. Lista de peças
| Item | Qtde |
|---|---|
| Conjunto de robô 17-DOF | 1 |
| Parafusos KM M2*7mm | 10 |
| Parafusos KB M2*7mm | 10 |
| Parafusos PM M3*6mm | 2 |
| Cabo de servo 200mm 3 pinos | 2 |
O conjunto de robô 17-DOF inclui
- RA8-U25H-M × 17
- Peças estruturais do robô (conjunto) × 1
- Placa adaptadora RUC-01 × 1
- Seeed XIAO ESP32-S3 × 1
- Placa de expansão Seeed XIAO × 1
4. Dimensões
5. Arquitetura de hardware
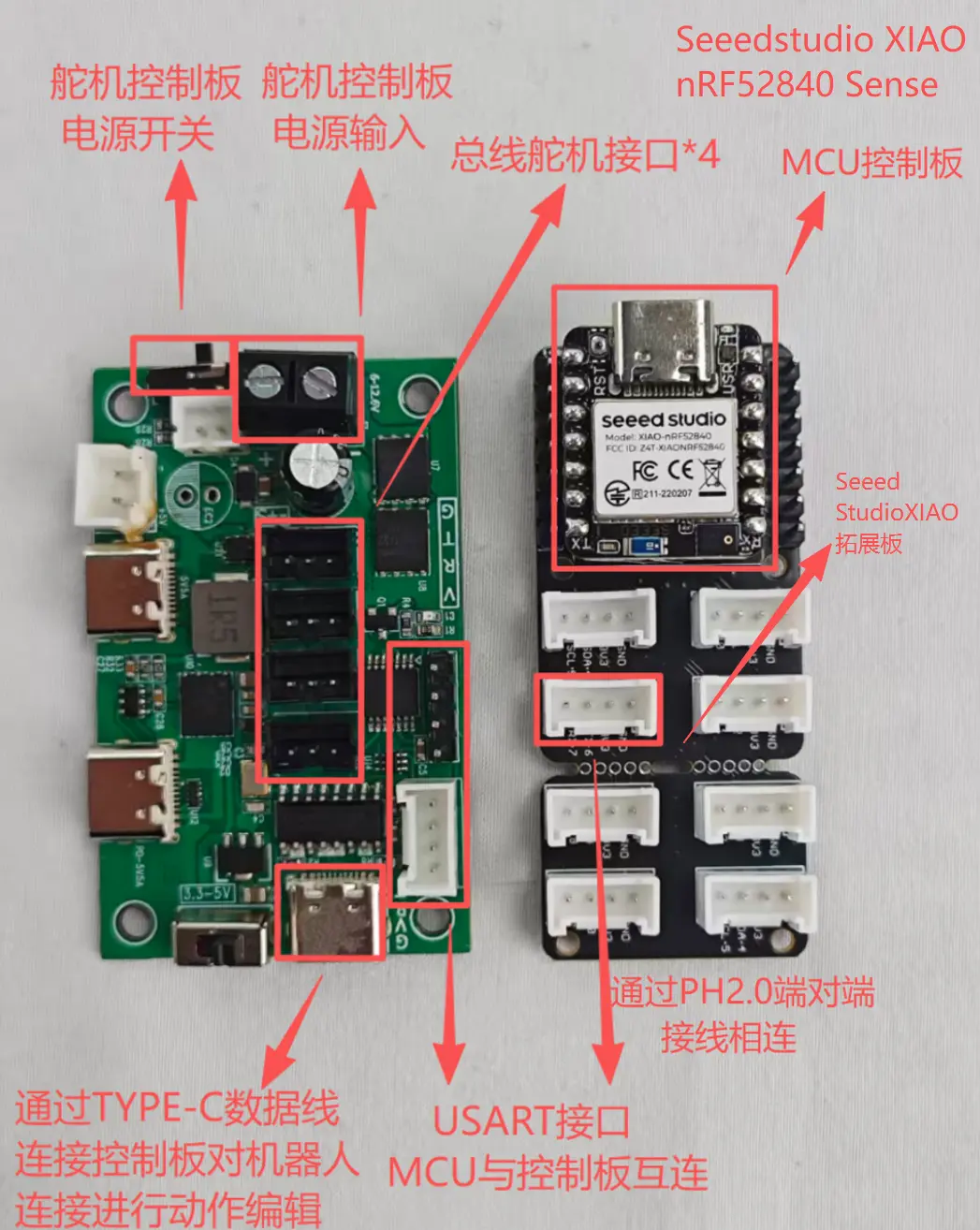
Acionamento e gerenciamento de energia (Placa de interface RUC-01)
Servindo como o hub de energia do robô, o módulo de acionamento e gerenciamento de energia (Placa de interface RUC-01) é responsável pelo gerenciamento da comunicação em barramento e pela distribuição de energia:
- Comunicação dos servos: 4 interfaces de servos de barramento onboard (suportam expansão em cadeia) responsáveis pela entrega de sinal e energia para os 17 servomotores de barramento.
- Interface de depuração para PC: Porta USB Type-C integrada para conexão direta a um host PC para edição e depuração de grupos de movimento.
- Alimentação do sistema: Lida com a conversão de tensão e fornece entrada de energia estável para a placa controladora principal.
- Interface de comunicação: Fornece uma porta serial UART padrão para receber comandos de controle da placa controladora principal de nível superior.
Controlador lógico principal e expansão (MCU + Grove Shield)
Servindo como o "cérebro" do robô, o controlador lógico principal e expansão (MCU + Grove Shield) é responsável por executar algoritmos de controle e processar dados de sensores:
- Controlador central: Utiliza a placa de desenvolvimento da série Seeed Studio XIAO, compacta em tamanho, mas com desempenho poderoso.
- Expansão do ecossistema: Emparelhado com uma placa de expansão com interface Grove que fornece interfaces de uso geral abundantes.
- Funções principais: Executa programas de cinemática do robô e se conecta perfeitamente a vários sensores (como ultrassom, visão, módulos de voz etc.) por meio das interfaces Grove para alcançar funções interativas complexas.
Descrição do fluxo de dados
Modo de depuração/edição (Debug Mode)
PC --(USB)--> RUC-01 --(Bus)--> Servos
Descrição: Ajuste diretamente os ângulos dos servos e salve grupos de movimento via software de PC, ignorando o controlador principal XIAO.
Modo autônomo (Autonomous Mode)
Sensor / Remote --(Signal)--> XIAO --(UART Command)--> RUC-01 --(Bus)--> Servos
Descrição: O controlador principal XIAO controla autonomamente as ações do robô com base no feedback dos sensores ou em código pré-armazenado.
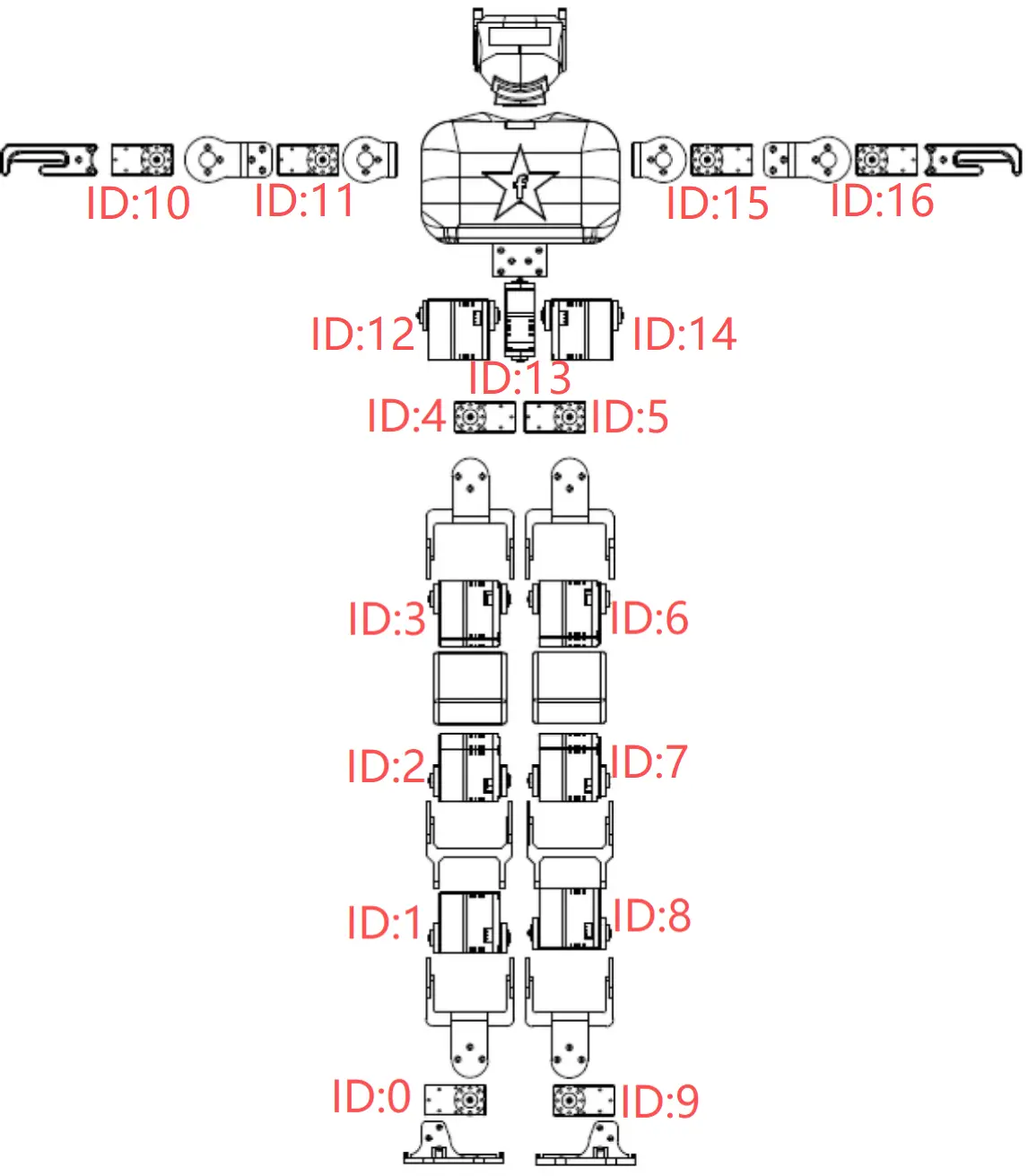
6. Estrutura mecânica
- Exibição da estrutura do robô e numeração padrão de ID dos servos
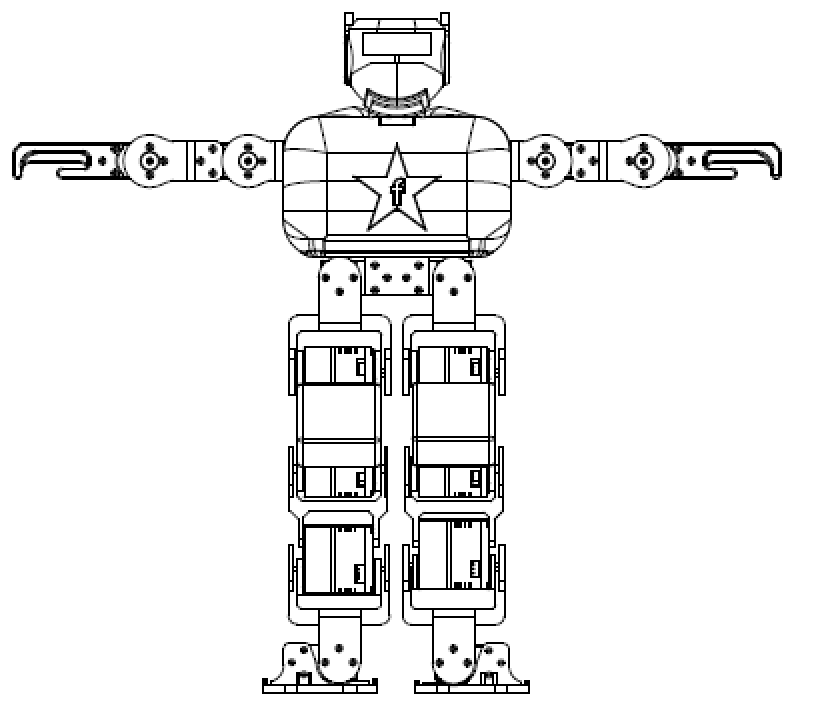
- Postura do robô quando todos os servomotores estão em zero grau
7. Desenhos e download de modelos
Para obter os dados completos de impressão 3D, visite: MakerWorld - Atom X
Forneceremos gradualmente vídeos de montagem mais completos e instruções ilustradas posteriormente. Fique atento às atualizações nesta página.
8. Guia de conexão

9. Instruções de uso
Consulte o manual do usuário do Atom-S para o uso do Atom-X. Todas as operações são idênticas às do Atom-S.
FAQ
P1: Que bateria deve ser usada com o Atom-X?
R: Recomenda-se uma bateria Li-Po 2S ou 3S, usada com um conector XT60.
P2: Outras placas controladoras principais podem ser usadas em vez da XIAO ESP32-S3?
R: O projeto é otimizado para a XIAO ESP32-S3, mas qualquer placa de desenvolvimento ESP32 com GPIO suficiente pode ser adaptada modificando o código.
P3: Como faço para atualizar o firmware?
R: Conecte a XIAO ESP32-S3 ao seu computador via USB e envie o novo programa usando Arduino IDE ou PlatformIO.