Controlar PX4 com reComputer Jetson
Ao combinar um computador acompanhante de alto desempenho como o reComputer Mini J3010 (Jetson Orin Nano 4G) com um controlador de voo PX4, você cria a arquitetura central para uma ampla gama de sistemas inteligentes não tripulados, incluindo carros, barcos e drones autônomos. Essa combinação poderosa desbloqueia aplicações inovadoras em áreas como logística, pesquisa científica, busca e salvamento e agricultura de precisão.
Essa configuração permite tarefas embarcadas complexas, como navegação visual, rastreamento de objetos e desvio de obstáculos em tempo real. O link de comunicação entre esses dois “cérebros” é crítico para o desempenho geral e a confiabilidade do sistema.

- Como conectar fisicamente o seu Jetson a um Pixhawk.
- Os prós e contras de uXRCE-DDS, MAVSDK e MAVROS.
- Instruções passo a passo de configuração para todos os três métodos de comunicação.
- Como verificar a conexão e solucionar problemas comuns.
Pré-requisitos
Antes de começar, certifique-se de ter o seguinte:
- Hardware: Todos os dispositivos listados na tabela “Ambiente de Laboratório” abaixo.
- Software: Uma instalação nova do Jetson Pack 6.2 e do ROS 2 Humble.
- Ferramentas:
gitepipinstalados no seu Jetson. - Conhecimento: Familiaridade básica com a linha de comando do Linux, conceitos de ROS 2 (nós, tópicos) e parâmetros PX4 no QGroundControl.
Configuração do Sistema
Ambiente de Laboratório
| Componente | Dispositivo/Software | Versão/Modelo |
|---|---|---|
| Computador Acompanhante | Dispositivo | reComputer Mini J3010 (Jetson Orin Nano 4G) |
| SO | Ubuntu 22.04 (JetPack 6.2) | |
| ROS | ROS 2 Humble | |
| Controlador de Voo | MCU | Pixhawk 4 Mini |
| Firmware | PX4 v1.15 | |
| PC da Estação de Solo | SO | Ubuntu 22.04 |
| QGC | QGroundControl v5.0 ou superior |
Conexão de Hardware
Recomendamos fortemente usar a UART nativa do Jetson para uma conexão robusta que não ocupe uma porta USB.
- Fiação: Use um cabo JST-GH de 4 pinos para conectar a porta
TELEM1do Pixhawk 4 Mini ao conectorUART1do Jetson Orin Nano. - Arquivo de Dispositivo: Essa porta serial corresponde a
/dev/ttyTHS1no sistema operacional do Jetson.
Detalhes de Porta e Pinout do Pixhawk 4 Mini (Clique para expandir)
| UART | Dispositivo | Descrição de Parâmetro no QGC | Rótulo da Porta no FC |
|---|---|---|---|
| UART1 | /dev/ttyS0 | GPS1 | Módulo GPS |
| USART2 | /dev/ttyS1 | TELEM1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 | N/D |
| UART4 | /dev/ttyS3 | TELEM/SERIAL4 | UART/I2C B |
| USART6 | /dev/ttyS4 | N/D | RC IN |
| UART7 | /dev/ttyS5 | N/D | Depuração |
| UART8 | /dev/ttyS6 | N/D | Não conectada (sem PX4IO) |
Portas TELEM1, TELEM2
| Pino | Sinal | Volt |
|---|---|---|
| 1(vermelho) | VCC | +5V |
| 2(preto) | TX(out) | +3.3V |
| 3(preto) | RX(in) | +3.3V |
| 4(preto) | CTS(in) | +3.3V |
| 5(preto) | RTS(out) | +3.3V |
| 6(preto) | GND | GND |
Porta DSM RC
| Pino | Sinal | Volt |
|---|---|---|
| 1(nulo) | VDD_5V_SBUS_RC | +5V |
| 2(amarelo) | SBUS* | +3.3V |
| 3(nulo) | RSSI** | +3.3V |
| 4(vermelho) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(preto) | GND | GND |
Porta UART & I2C B *
| Pino | Sinal | Volt |
|---|---|---|
| 1(vermelho) | VCC | +5V |
| 2(preto) | TX(out) | +3.3V |
| 3(preto) | RX(in) | +3.3V |
| 4(preto) | SCL2 | +3.3V |
| 5(preto) | SDA2 | +3.3V |
| 6(preto) | GND | GND |
Porta SBUS RC
| Pino | Sinal | Volt |
|---|---|---|
| 1(vermelho) | VDD_5V_SBUS_RC | +5V |
| 2(amarelo) | SBUS* | +3.3V |
| 3(nulo) | RSSI** | +3.3V |
| 4(nulo) | VDD_3V3_SPEKTRUM | +3.3V |
| 5(preto) | GND | GND |
Notas de rodapé:
- (Porta UART & I2C B): Uma porta sobressalente para conectar sensores que suportam comunicação serial ou I2C; por exemplo, um segundo módulo GPS pode ser conectado aqui.
- (Sinal SBUS): Conecte aqui o fio de sinal do receptor SBUS ou DSM/Spektrum.
- (Sinal RSSI): Envia a informação de intensidade do sinal de RC para o piloto automático.
Para evitar usar sudo em todos os comandos seriais, você deve adicionar seu usuário ao grupo dialout. Esta é uma configuração crítica feita apenas uma vez.
sudo usermod -a -G dialout $USER
Você deve reiniciar o Jetson para que essa alteração tenha efeito!
Escolhendo seu Método: Uma Comparação
Antes de começar, entenda os trade-offs. A escolha certa depende inteiramente dos objetivos do seu projeto.
| Recurso | uXRCE-DDS (Nativo ROS 2) 🚀 | MAVSDK (API de Alto Nível) 🐍 | MAVROS (Ponte ROS) 🌉 |
|---|---|---|---|
| Arquitetura | PX4 e ROS 2 compartilham um espaço de dados DDS para comunicação nativa. | Uma biblioteca C++ independente (com wrappers) que fornece uma API de alto nível. | Uma ponte/gateway que traduz o protocolo MAVLink para tópicos/serviços ROS. |
| Desempenho | Mais alto. Transferência de dados zero-copy com a menor latência. | Alto. As chamadas de API geram diretamente mensagens MAVLink eficientes. | Bom. Existe uma pequena sobrecarga devido à camada de tradução MAVLink-para-ROS. |
| Facilidade de Uso | Moderada. Exige compilar o Agent e px4_msgs. | Mais fácil. API intuitiva, baseada em funções, ideal para prototipagem rápida. | Curva de aprendizado íngreme, mas oferece a integração mais profunda com o ecossistema ROS. |
| Flexibilidade | Excelente. Fornece acesso direto a todos os tópicos internos uORB do PX4. | Limitada. Expõe ações comuns (decolagem, waypoints), mas não dados brutos. | Excelente. Acesso a praticamente todas as mensagens, parâmetros e serviços MAVLink. |
| Integração com ROS | ROS 2 Nativo. O método oficial e preparado para o futuro para ROS 2. | Agnóstico ao ROS. Pode ser usado em qualquer projeto, facilmente encapsulado em um nó ROS. | Cêntrico em ROS. O padrão de fato para ROS 1 e amplamente usado em ROS 2. |
| Caso de Uso | Projetos ROS 2 com requisitos críticos de desempenho que precisam de acesso a dados de baixo nível. | Scripts em nível de tarefa, prototipagem rápida, projetos sem ROS e educação. | Sistemas robóticos complexos integrados com pacotes ROS como Nav2 ou MoveIt. |
Método 1: uXRCE-DDS (Integração Nativa com ROS 2)
Esta é a solução oficial do PX4 para ROS 2, conectando diretamente seu sistema interno de mensagens uORB à rede ROS 2 para comunicação sem sobrecarga.
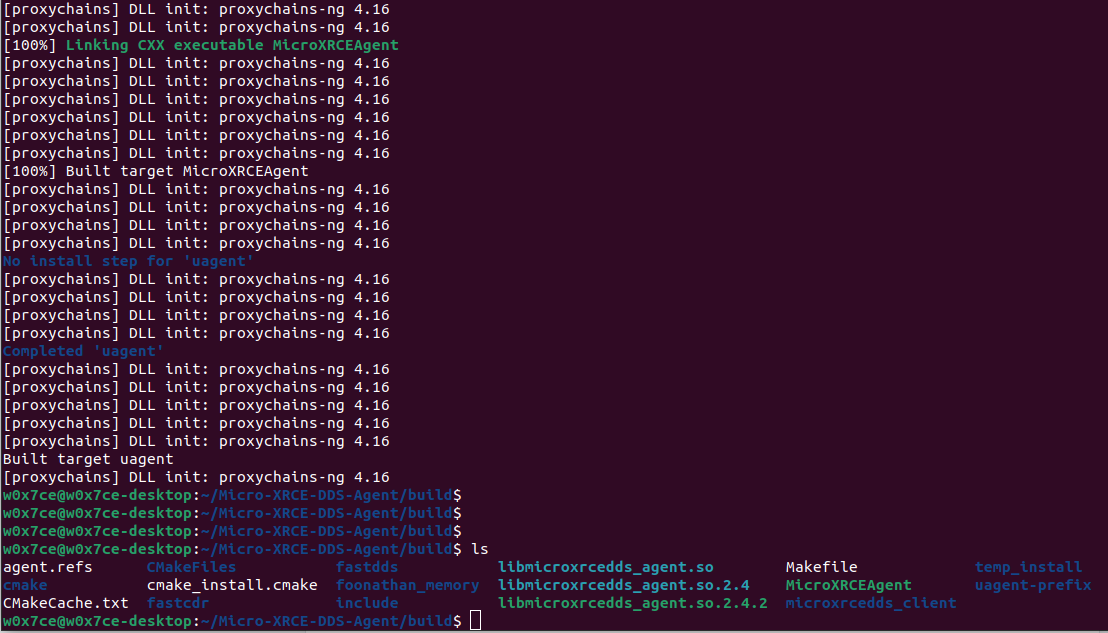
Passo 1: Compilar o Micro XRCE-DDS Agent
O Agent é um pequeno programa no Jetson que atua como um intermediário entre a conexão serial do controlador de voo e a rede ROS 2.
# 1. Clone the specific version of the Agent repository
cd ~
git clone -b v2.4.2 https://github.com/eProsima/Micro-XRCE-DDS-Agent.git
cd Micro-XRCE-DDS-Agent
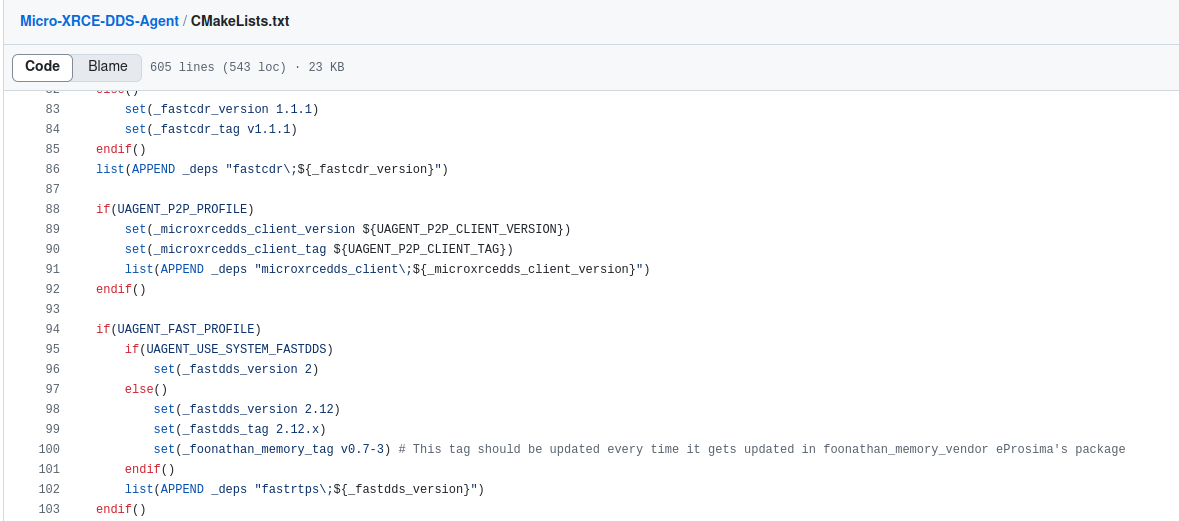
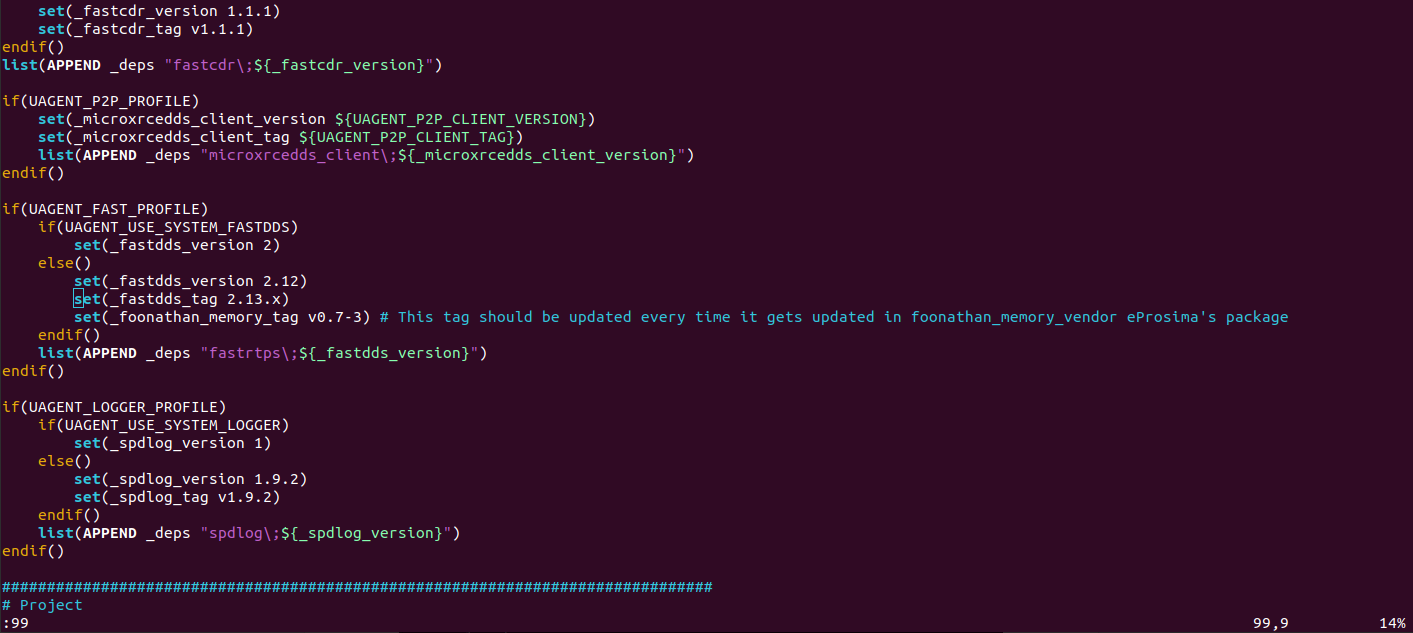
# 2. IMPORTANT: Patch the Fast-DDS dependency version
# The v2.12.x tag for fastdds was removed by the vendor; we update it to a working one.
sed -i 's/v2.12.x/v2.13.x/g' SuperBuild.cmake
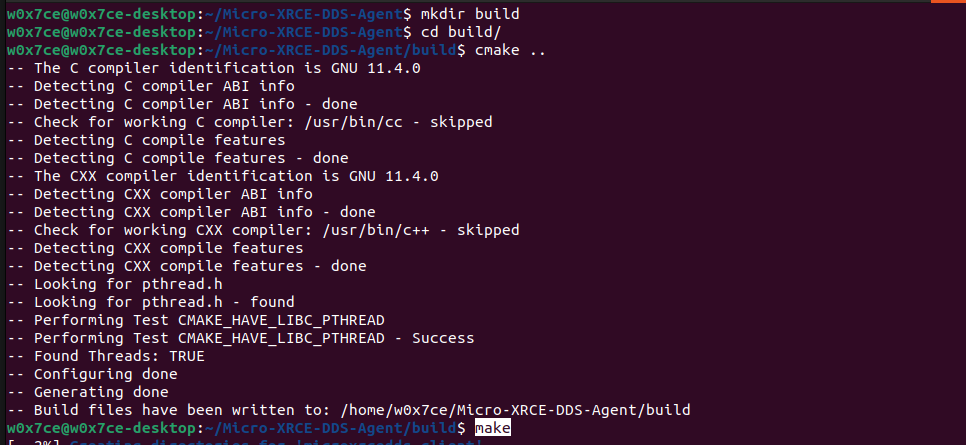
# 3. Build and install the Agent
mkdir build && cd build
cmake ..
make
sudo make install # Installs MicroXRCEAgent globally
Passo 2: Compilar o pacote ROS 2 px4_msgs
Para permitir que o ROS 2 entenda os tópicos do PX4, você deve compilar suas definições de mensagens.
# 1. Create a ROS 2 workspace
mkdir -p ~/px4_ros_ws/src
cd ~/px4_ros_ws/src
# 2. Clone the required repositories
git clone https://github.com/PX4/px4_msgs.git
git clone https://github.com/PX4/px4_ros_com.git # Contains examples
# 3. Checkout the branch matching your firmware version
cd px4_msgs
git checkout release/1.15
# 4. Build the workspace
cd ~/px4_ros_ws
source /opt/ros/humble/setup.bash
colcon build
A versão de px4_msgs deve estar alinhada com a versão do firmware PX4. Isso é crítico para a compatibilidade.
Além disso, o suporte ROS 2 nativo completo via uXRCE-DDS, que se tornou o padrão no firmware PX4 v1.14 e posterior, exige controladores de voo com 2MB de memória flash (como o Pixhawk 4 Mini usado neste guia).
Hardware mais antigo e clássico, como o popular Pixhawk 2.4.8 (e outras placas baseadas em FMUv2), possui apenas 1MB de flash. Eles não conseguem executar o firmware pré-compilado padrão exigido para este método com uXRCE-DDS. Embora seja teoricamente possível criar um firmware personalizado e reduzido, isso é um processo complexo.
Se você estiver usando um Pixhawk 2.4.8 ou outra placa com 1MB de flash, recomendamos fortemente que pule este método e siga diretamente para o Método 2 (MAVSDK) ou Método 3 (MAVROS), já que ambos utilizam o protocolo MAVLink, que é totalmente suportado pelo seu hardware.
O branch px4_msgs deve corresponder à sua versão de firmware PX4 para garantir que as definições de mensagem sejam compatíveis.

Etapa 3: Configurar o Firmware PX4
Conecte-se ao QGroundControl e defina os seguintes parâmetros:
UXRCE_DDS_CFG: Defina comoTELEM1. Isso ativa o cliente XRCE-DDS nessa porta.SER_TEL1_BAUD: Defina como921600 8N1.MAV_1_CONFIG: Defina comoDisabled. Isso é crucial para evitar que o MAVLink entre em conflito na mesma porta.- Salve os parâmetros e reinicie o controlador de voo.
Etapa 4: Iniciar e Verificar
-
Inicie o Agent no Jetson (em um terminal):
Terminal 1: Run AgentMicroXRCEAgent serial --dev /dev/ttyTHS1 -b 921600 -
Verifique os tópicos ROS 2 (em um novo terminal):
Terminal 2: Verify Topics# Source your workspace in every new terminal
source ~/px4_ros_ws/install/setup.bash
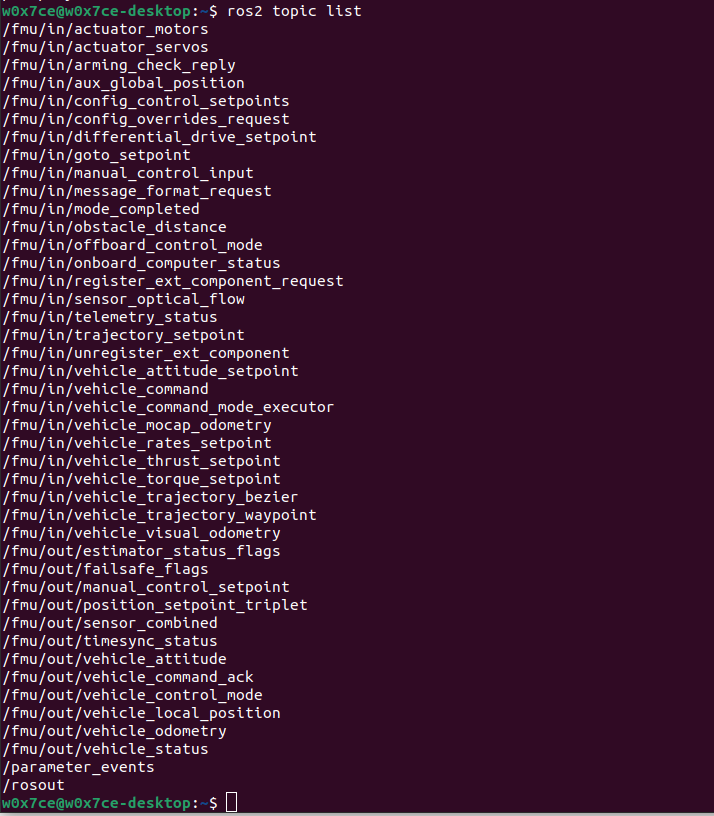
# You should see a list of topics starting with /fmu/
ros2 topic list | grep /fmu/
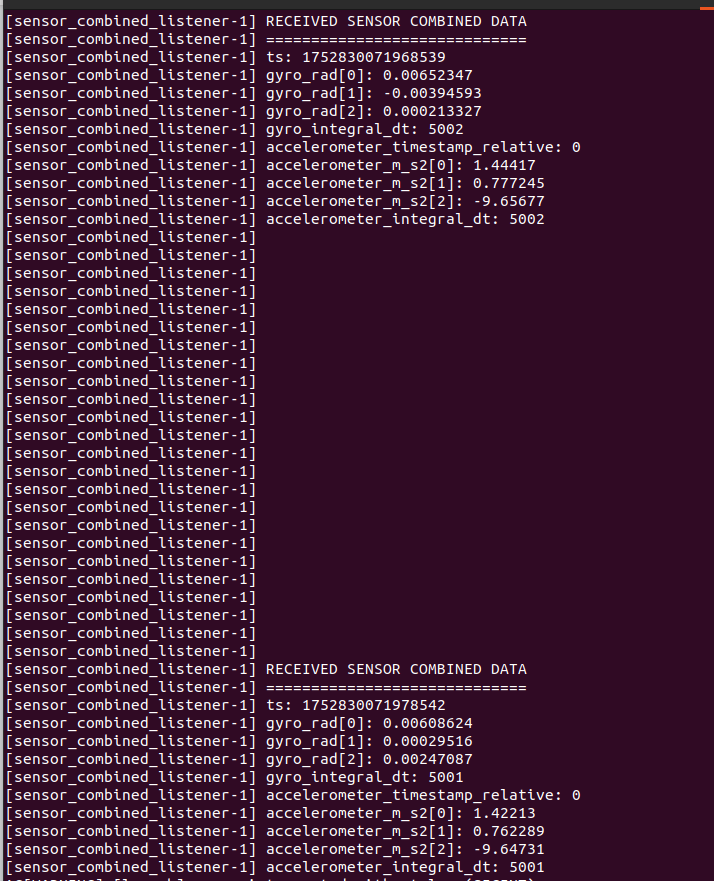
# Echo a topic to see live data streaming from the FCU
ros2 topic echo /fmu/out/vehicle_odometry
Método 2: MAVSDK (API de Alto Nível)
O MAVSDK fornece uma API simples e moderna para controlar drones programaticamente, abstraindo as complexidades do protocolo MAVLink. É perfeito para escrever scripts de missão em alto nível.
Etapa 1: Configurar o Firmware PX4
No QGroundControl, altere a configuração da porta de DDS de volta para o modo MAVLink.
UXRCE_DDS_CFG: Defina novamente comoDisabled.MAV_1_CONFIG: Defina comoTELEM 1para atribuir a porta ao MAVLink.MAV_1_MODE: Defina comoOnboardpara especificar que o link é para um computador acompanhante.SER_TEL1_BAUD: Certifique-se de que ainda está como921600 8N1.- Salve os parâmetros e reinicie o controlador de voo.
Etapa 2: Instalar o MAVSDK-Python
pip3 install mavsdk
Etapa 3: Escrever e Executar um Script de Controle
Este script em Python conecta, decola até 10 metros, espera e então pousa.
import asyncio
from mavsdk import System
async def run():
# Create a drone object and connect to the flight controller
drone = System()
await drone.connect(system_address="serial:///dev/ttyTHS1:921600")
print("Waiting for drone to connect...")
# This is an asynchronous generator that yields connection state updates
async for state in drone.core.connection_state():
if state.is_connected:
print("--> Drone discovered!")
break
if __name__ == "__main__":
# Run the asyncio event loop
asyncio.run(run())
Execute o script a partir do seu terminal: python3 takeoff_and_land.py.
Método 3: MAVROS (A Poderosa Ponte ROS)
O MAVROS é o gateway MAVLink-para-ROS amplamente testado em campo, oferecendo funcionalidade abrangente e estabilidade inigualável para sistemas complexos baseados em ROS.
Etapa 1: Configurar o Firmware PX4
A configuração do PX4 para o MAVROS é idêntica à configuração do MAVSDK. Certifique-se de que TELEM1 esteja configurado para MAVLink no modo Onboard.
Etapa 2: Instalar o MAVROS e Dependências
sudo apt update
sudo apt install ros-humble-mavros ros-humble-mavros-msgs
O MAVROS requer um conjunto de dados geográficos para transformações de coordenadas. A ausência desse conjunto de dados é uma causa comum de travamentos na inicialização. Este script faz o download e a instalação.
sudo bash /opt/ros/humble/lib/mavros/install_geographiclib_datasets.sh
Etapa 3: Iniciar e Verificar
-
Inicie o nó MAVROS:
Terminal 1: Launch MAVROSsource /opt/ros/humble/setup.bash
# Launch mavros, specifying the FCU connection URL via a parameter
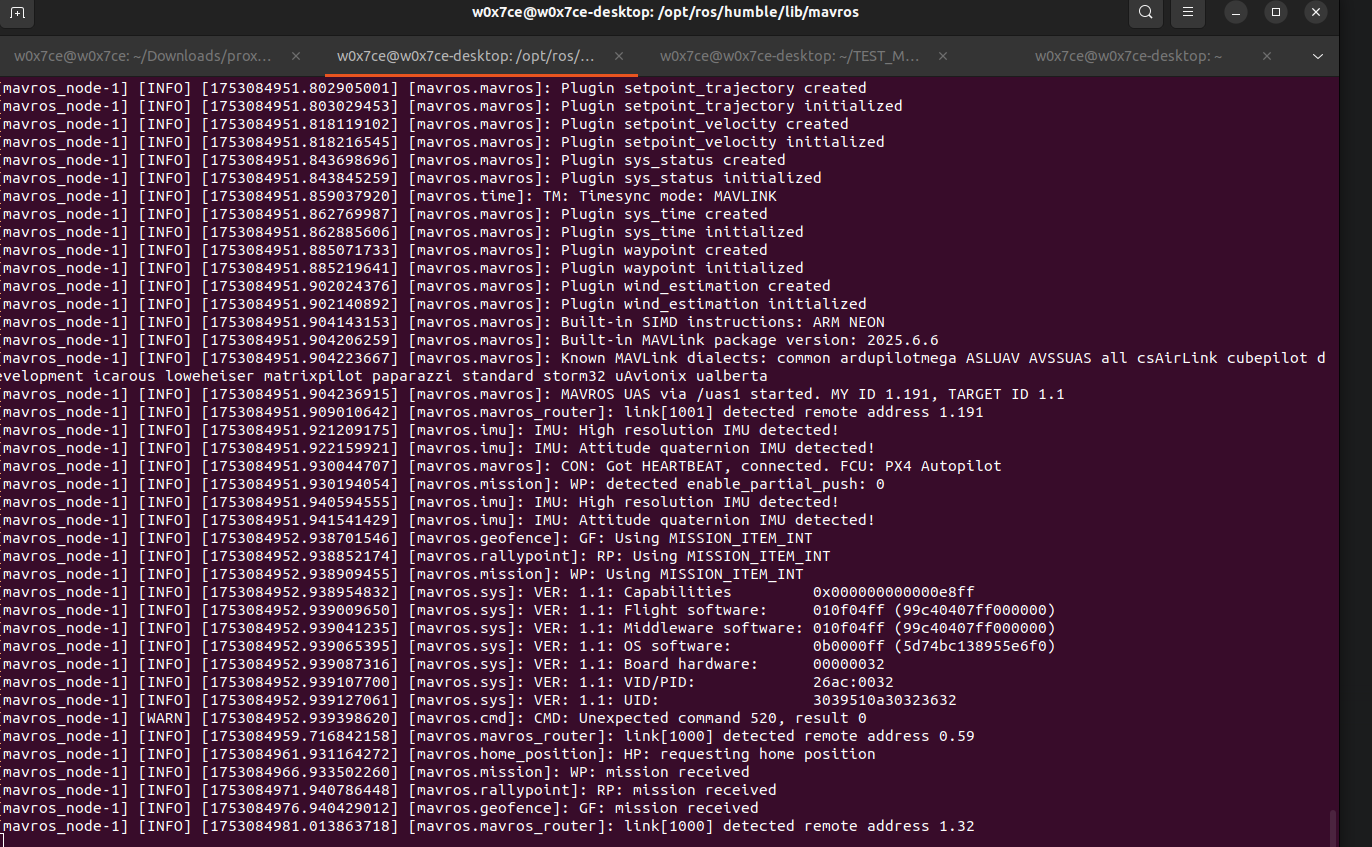
ros2 launch mavros px4.launch fcu_url:="serial:///dev/ttyTHS1:921600" -
Verifique a Conexão:
Em um novo terminal, faça echo do tópico de estado do MAVROS.
Terminal 2: Verify Connectionros2 topic echo /mavros/stateObserve a saída. Quando o campo
connectedmudar paratrue, o MAVROS estará se comunicando com sucesso com o seu PX4.

Solução de Problemas Comuns
Se você tiver problemas, verifique primeiro estas questões comuns.
- "Permission Denied" na porta serial: Você esqueceu de adicionar seu usuário ao grupo
dialoute reiniciar. Consulte a seção "Conexão de Hardware". - "No such file or directory" para
/dev/ttyTHS1: Verifique novamente a fiação física. O controlador de voo está ligado? Executels /dev/ttyTHS*para confirmar o nome do dispositivo. - MAVROS trava na inicialização: Você provavelmente pulou a etapa
install_geographiclib_dataset.sh. Execute o comando do Método 3. colcon buildfalha: Certifique-se de que você tenha carregado o ambiente ROS 2 primeiro (source /opt/ros/humble/setup.bash). Para problemas de dependência mais complexos, talvez seja necessário executarrosdep install --from-paths src --ignore-src -r -y.
Palavras Finais
Agora você tem três métodos poderosos para habilitar a comunicação entre um Jetson Orin e um controlador de voo PX4. A melhor ferramenta depende da arquitetura do seu projeto, das necessidades de desempenho e da velocidade de desenvolvimento. Ao entender os trade-offs, você pode construir uma base robusta para qualquer aplicação de drone autônomo.
Bons voos! 🚁
Recursos
Suporte Técnico & Discussão de Produtos
Obrigado por escolher nossos produtos! Estamos aqui para lhe fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja o mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.