Controlar o reBot Arm B601 com NemoClaw no Nvidia Jetson Thor
1. Visão geral do projeto
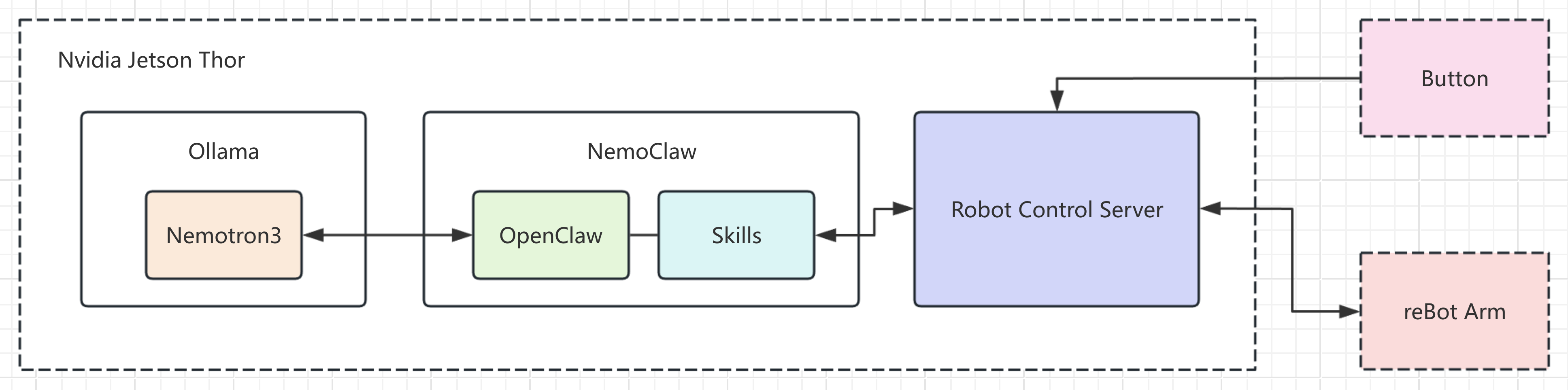
NVIDIA NemoClaw é uma pilha de referência open-source que simplifica a execução de assistentes OpenClaw always-on com mais segurança. Este wiki explica como implantar o NemoClaw no Jetson Thor e conectar os recursos do reBot Arm B601 ao fluxo de trabalho do agente NemoClaw, formando um ciclo fechado de: compreensão semântica + detecção visual + execução robótica.
NemoClaw: Framework local de agente/controle para orquestração de tarefas e roteamento de comandos.Nemotron3: Capacidade opcional de modelo para compreensão de intenção e tomada de decisão em alto nível.Nvidia Jetson Thor: Plataforma de computação local para inferência, serviços de backend e drivers de dispositivos.reBot Arm B601: braço robótico para agarrar e posicionar objetos.
2. Requisitos de hardware
- Nvidia Jetson Thor (JetPack 7.x instalado)
- reBot Arm B601 DM
- Adaptador USB-para-CAN
- Câmera USB
- Fonte de alimentação e cabo USB para o braço robótico
- Botão USB (opcional)
| reBot Arm B601 | NVIDIA® Jetson AGX Thor™ Developer Kit |
|---|---|
 |  |
3. Conexão de hardware
- Monte e configure o braço robótico.
- Conecte o adaptador USB-para-CAN, a câmera USB e o braço robótico às portas USB Type-A do Jetson Thor.
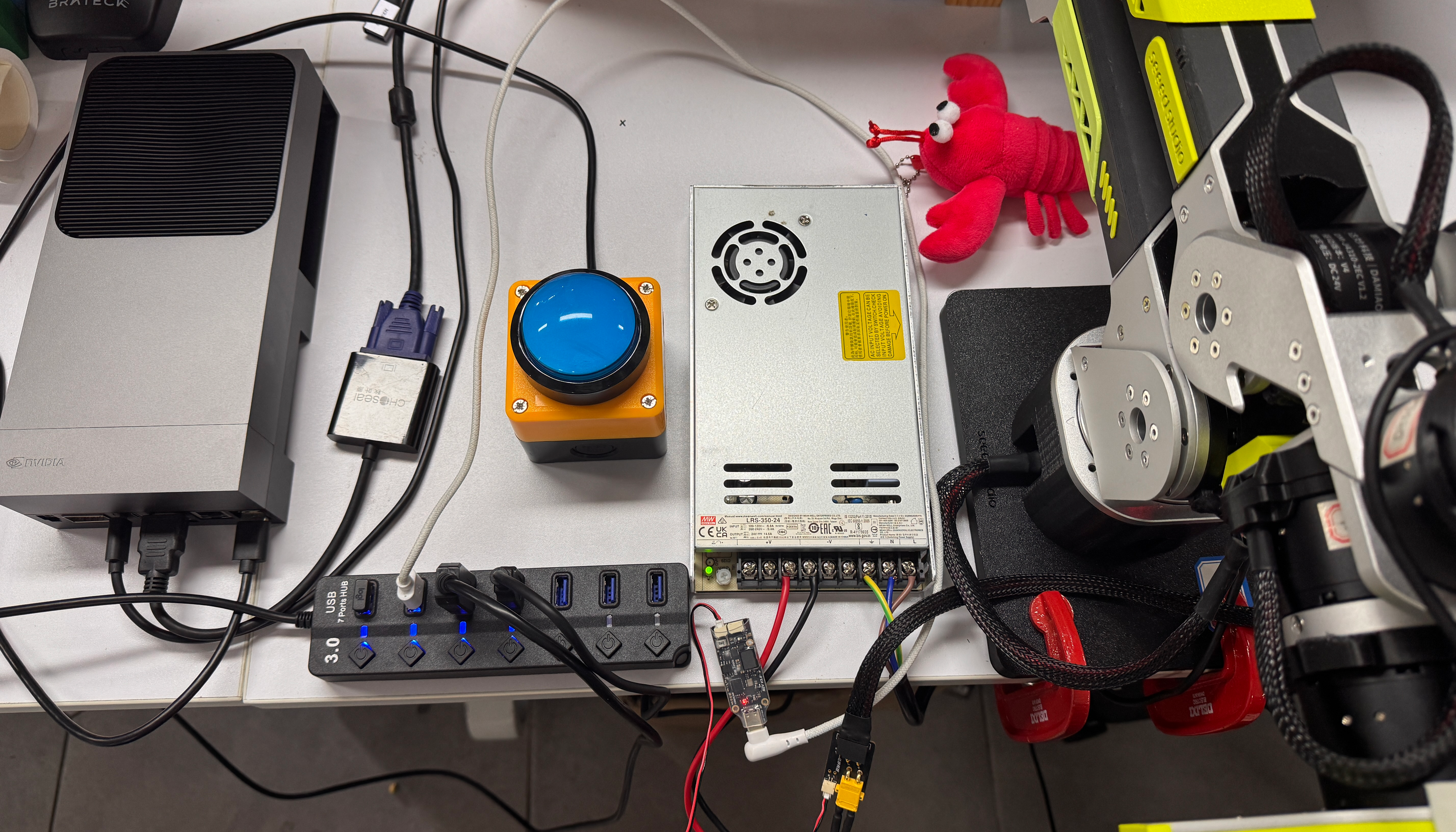
Os dispositivos Jetson podem fornecer apenas duas portas USB Type-A. Use um hub USB se precisar de mais portas.
Após ligar, verifique os dispositivos:
ls /dev/ttyACM*
ls /dev/video*
Se tudo estiver conectado corretamente, você deverá ver uma saída semelhante a:

4. Configuração do sistema e dependências
4.1 Instalar o Ollama
Se for necessária capacidade local de LLM (opcional):
curl -fsSL https://ollama.com/install.sh | sh
ollama pull nemotron3:33b

4.2 Instalar o NemoClaw
Instale o NemoClaw no Jetson:
curl -fsSL https://www.nvidia.com/nemoclaw.sh | bash
Em seguida, execute nemoclaw onboard para criar um novo app. Um exemplo de log de onboarding interativo é mostrado em:
nemoclaw onboard log
seeed@seeed:~$ nemoclaw onboard --no-gpu
NemoClaw Onboarding
===================
[1/8] Preflight checks
──────────────────────────────────────────────────
✓ Docker is running
✓ Container DNS resolution works
✓ Container runtime: docker
✓ Container runtime resources: 14 vCPU / 122.8 GiB
✓ openshell CLI: openshell 0.0.37
Cleaning up previous NemoClaw session...
! No active forward found for port 18789
✓ Previous session cleaned up
✓ Port 8080 available (OpenShell gateway)
✓ NVIDIA GPU detected (NVIDIA Thor, 125771 MB)
✓ Sandbox GPU: disabled by configuration
✓ Memory OK: 125771 MB RAM + 0 MB swap
NVIDIA GPU hardware detected but nvidia-smi is not available.
Install NVIDIA drivers and the Container Toolkit for default GPU passthrough.
[2/8] Starting OpenShell gateway
──────────────────────────────────────────────────
Starting OpenShell Docker-driver gateway...
Gateway log: /home/seeed/.local/state/nemoclaw/openshell-docker-gateway/openshell-gateway.log
✓ Docker-driver gateway is healthy
[3/8] Configuring inference (NIM)
──────────────────────────────────────────────────
Detected local inference option: Ollama
Inference options:
1) NVIDIA Endpoints
2) OpenAI
3) Other OpenAI-compatible endpoint
4) Anthropic
5) Other Anthropic-compatible endpoint
6) Google Gemini
7) Local Ollama (localhost:11434) — running (suggested)
8) Model Router (experimental)
Choose [1]: 7
✓ Using Ollama on localhost:11434 (proxy on :11435)
Ollama models:
1) nemotron3:33b
2) qwen3.5:0.8b
3) nemotron-3-nano:30b
4) Other...
Choose model [3]: 1
Loading Ollama model: nemotron3:33b
Chat Completions API available — OpenClaw will use openai-completions.
Sandbox name (lowercase, starts with a letter, letters/numbers/internal hyphens only, ends with letter/number) [my-assistant]:
──────────────────────────────────────────────────
Review configuration
──────────────────────────────────────────────────
Provider: ollama-local
Model: nemotron3:33b
API key: (not required for ollama-local)
Web search: disabled
Messaging: none
Sandbox name: my-assistant
Note: Sandbox build typically takes 3–8 minutes on this host.
──────────────────────────────────────────────────
Web search and messaging channels will be prompted next.
Apply this configuration? [Y/n]:
[4/8] Setting up inference provider
──────────────────────────────────────────────────
✓ Active gateway set to 'nemoclaw'
✓ Updated provider ollama-local
Gateway inference configured:
Route: inference.local
Provider: ollama-local
Model: nemotron3:33b
Version: 12
Timeout: 180s
Priming Ollama model: nemotron3:33b
✓ Inference route set: ollama-local / nemotron3:33b
Enable Brave Web Search? [y/N]:
[5/8] Messaging channels
──────────────────────────────────────────────────
Available messaging channels:
[1] ○ telegram — Telegram bot messaging
[2] ○ discord — Discord bot messaging
[3] ○ slack — Slack bot messaging
Press 1-3 to toggle, Enter when done:
Skipping messaging channels.
[6/8] Creating sandbox
──────────────────────────────────────────────────
Creating sandbox 'my-assistant' (this takes a few minutes on first run)...
Pinning base image to sha256:1fb69ddbe730...
Building sandbox image...
Building image openshell/sandbox-from:1778663150 from /tmp/nemoclaw-bu...
Step 1/63 : ARG BASE_IMAGE=ghcr.io/nvidia/nemoclaw/sandbox-base@sha256...
Step 2/63 : FROM node:22-trixie-slim@sha256:2d9f5c76c8f4dd36e8f253bee5...
Step 3/63 : ENV NPM_CONFIG_AUDIT=false NPM_CONFIG_FUND=false N...
Step 4/63 : COPY nemoclaw/package.json nemoclaw/package-lock.json nemo...
Step 5/63 : COPY nemoclaw/src/ /opt/nemoclaw/src/
Step 6/63 : WORKDIR /opt/nemoclaw
Step 7/63 : RUN npm ci && npm run build
Step 8/63 : FROM ${BASE_IMAGE}
Step 9/63 : RUN set -eu; apt-mark manual procps e2fsprogs 2>/dev/n...
Step 10/63 : COPY --from=builder /opt/nemoclaw/dist/ /opt/nemoclaw/dist/
Step 11/63 : COPY nemoclaw/openclaw.plugin.json /opt/nemoclaw/
Step 12/63 : COPY nemoclaw/package.json nemoclaw/package-lock.json /op...
Step 13/63 : COPY nemoclaw-blueprint/ /opt/nemoclaw-blueprint/
Step 14/63 : WORKDIR /opt/nemoclaw
Step 15/63 : RUN npm ci --omit=dev
Step 16/63 : RUN set -eu; MIN_VER=$(grep -m 1 'min_openclaw_versio...
Step 17/63 : COPY scripts/rcf_patch.py /usr/local/lib/nemoclaw/rcf_pat...
Step 18/63 : RUN set -eu; OC_DIST=/usr/local/lib/node_modules/open...
Step 19/63 : RUN mkdir -p /sandbox/.nemoclaw/blueprints/0.1.0 && c...
Step 20/63 : COPY scripts/lib/sandbox-init.sh /usr/local/lib/nemoclaw/...
Step 21/63 : COPY scripts/nemoclaw-start.sh /usr/local/bin/nemoclaw-start
Step 22/63 : COPY nemoclaw-blueprint/scripts/*.js /usr/local/lib/nemoc...
Step 23/63 : COPY scripts/codex-acp-wrapper.sh /usr/local/bin/nemoclaw...
Step 24/63 : COPY scripts/generate-openclaw-config.py /usr/local/lib/n...
Step 25/63 : COPY nemoclaw-blueprint/openclaw-plugins/ /usr/local/shar...
Step 26/63 : RUN chmod 755 /usr/local/bin/nemoclaw-start /usr/local/bi...
Step 27/63 : ARG NEMOCLAW_MODEL=nemotron3:33b
Step 28/63 : ARG NEMOCLAW_PROVIDER_KEY=inference
Step 29/63 : ARG NEMOCLAW_PRIMARY_MODEL_REF=inference/nemotron3:33b
Step 30/63 : ARG CHAT_UI_URL=http://127.0.0.1:18789
Step 31/63 : ARG NEMOCLAW_INFERENCE_BASE_URL=https://inference.local/v1
Step 32/63 : ARG NEMOCLAW_INFERENCE_API=openai-completions
Step 33/63 : ARG NEMOCLAW_CONTEXT_WINDOW=131072
Step 34/63 : ARG NEMOCLAW_MAX_TOKENS=4096
Step 35/63 : ARG NEMOCLAW_REASONING=false
Step 36/63 : ARG NEMOCLAW_INFERENCE_INPUTS=text
Step 37/63 : ARG NEMOCLAW_AGENT_TIMEOUT=600
Step 38/63 : ARG NEMOCLAW_AGENT_HEARTBEAT_EVERY=
Step 39/63 : ARG NEMOCLAW_INFERENCE_COMPAT_B64=e30=
Step 40/63 : ARG NEMOCLAW_MESSAGING_CHANNELS_B64=W10=
Step 41/63 : ARG NEMOCLAW_MESSAGING_ALLOWED_IDS_B64=e30=
Step 42/63 : ARG NEMOCLAW_DISCORD_GUILDS_B64=e30=
Step 43/63 : ARG NEMOCLAW_TELEGRAM_CONFIG_B64=e30=
Step 44/63 : ARG NEMOCLAW_DISABLE_DEVICE_AUTH=1
Step 45/63 : ARG NEMOCLAW_BUILD_ID=1778663150303
Step 46/63 : ARG NEMOCLAW_PROXY_HOST=10.200.0.1
Step 47/63 : ARG NEMOCLAW_PROXY_PORT=3128
Step 48/63 : ARG NEMOCLAW_WEB_SEARCH_ENABLED=0
Step 49/63 : ENV NEMOCLAW_MODEL=${NEMOCLAW_MODEL} NEMOCLAW_PROVIDE...
Step 50/63 : WORKDIR /sandbox
Step 51/63 : USER sandbox
Step 52/63 : RUN python3 /usr/local/lib/nemoclaw/generate-openclaw-con...
Step 53/63 : RUN (openclaw doctor --fix > /dev/null 2>&1 || true) ...
Still building sandbox image... (20s elapsed)
Still building sandbox image... (30s elapsed)
Still building sandbox image... (45s elapsed)
Still building sandbox image... (60s elapsed)
Still building sandbox image... (75s elapsed)
Still building sandbox image... (90s elapsed)
Still building sandbox image... (105s elapsed)
Still building sandbox image... (120s elapsed)
Still building sandbox image... (135s elapsed)
Step 54/63 : RUN python3 -c "import json, os; path = os.path.expanduse...
Step 55/63 : USER root
Step 56/63 : RUN set -eu; config_dir=/sandbox/.openclaw; data_...
Step 57/63 : RUN if id gateway >/dev/null 2>&1 && id sandbox >/dev/nul...
Step 58/63 : RUN chown -R sandbox:sandbox /sandbox/.openclaw && ch...
Still building sandbox image... (175s elapsed)
Step 59/63 : RUN if ! grep -q "/tmp/nemoclaw-proxy-env.sh" /etc/profil...
Step 60/63 : RUN sha256sum /sandbox/.openclaw/openclaw.json > /sandbox...
Step 61/63 : RUN chown root:root /sandbox/.nemoclaw && chmod 1755 ...
Step 62/63 : ENTRYPOINT ["/usr/local/bin/nemoclaw-start"]
Step 63/63 : CMD ["/bin/bash"]
Built image openshell/sandbox-from:1778663150
Waiting for sandbox to become ready...
Sandbox reported Ready before create stream exited; continuing.
Waiting for sandbox to become ready...
Waiting for NemoClaw dashboard to become ready...
✓ Dashboard is live
! No active forward found for port 18789
✓ Sandbox 'my-assistant' created
[7/8] Setting up OpenClaw inside sandbox
──────────────────────────────────────────────────
✓ OpenClaw gateway launched inside sandbox
[8/8] Policy presets
──────────────────────────────────────────────────
Policy tier — controls which network presets are enabled:
[ ] Restricted
[ ] Balanced
> [✓] Open
↑/↓ j/k move Space select Enter confirm
Presets (Open defaults):
> [✓] [rw] npm
[✓] [rw] pypi
[✓] [rw] huggingface
[✓] [rw] brew
[✓] [rw] brave
[✓] [rw] slack
[✓] [rw] discord
[✓] [rw] telegram
[✓] [rw] jira
[✓] [rw] outlook
[ ] github
[✓] [rw] local-inference
↑/↓ j/k move Space include r toggle rw Enter confirm
Widening sandbox egress — adding: registry.npmjs.org, registry.yarnpkg.com
✓ Policy version 3 submitted (hash: 77d8e31dfb8c)
✓ Policy version 3 loaded (active version: 3)
Applied preset: npm
Widening sandbox egress — adding: pypi.org, files.pythonhosted.org
✓ Policy version 4 submitted (hash: 6637ad37a7b2)
✓ Policy version 4 loaded (active version: 4)
Applied preset: pypi
Widening sandbox egress — adding: huggingface.co, cdn-lfs.huggingface.co, router.huggingface.co
✓ Policy version 5 submitted (hash: e81bc64dabe1)
✓ Policy version 5 loaded (active version: 5)
Applied preset: huggingface
Widening sandbox egress — adding: formulae.brew.sh, github.com, ghcr.io, pkg-containers.githubusercontent.com, objects.githubusercontent.com, raw.githubusercontent.com
✓ Policy version 6 submitted (hash: d96caba06e19)
✓ Policy version 6 loaded (active version: 6)
Applied preset: brew
Widening sandbox egress — adding: api.search.brave.com
✓ Policy version 7 submitted (hash: be83e02b9a1c)
✓ Policy version 7 loaded (active version: 7)
Applied preset: brave
Widening sandbox egress — adding: slack.com, api.slack.com, hooks.slack.com, wss-primary.slack.com, wss-backup.slack.com
✓ Policy version 8 submitted (hash: 2b5d1cafea38)
✓ Policy version 8 loaded (active version: 8)
Applied preset: slack
Widening sandbox egress — adding: discord.com, gateway.discord.gg, cdn.discordapp.com, media.discordapp.net
✓ Policy version 9 submitted (hash: c4b43ab2846f)
✓ Policy version 9 loaded (active version: 9)
Applied preset: discord
Widening sandbox egress — adding: api.telegram.org
✓ Policy version 10 submitted (hash: 0bd5f6fdf97c)
✓ Policy version 10 loaded (active version: 10)
Applied preset: telegram
Widening sandbox egress — adding: *.atlassian.net, auth.atlassian.com, api.atlassian.com
✓ Policy version 11 submitted (hash: 3b7cf306a733)
✓ Policy version 11 loaded (active version: 11)
Applied preset: jira
Widening sandbox egress — adding: graph.microsoft.com, login.microsoftonline.com, outlook.office365.com, outlook.office.com
✓ Policy version 12 submitted (hash: 48737772cbc4)
✓ Policy version 12 loaded (active version: 12)
Applied preset: outlook
Widening sandbox egress — adding: host.openshell.internal, host.openshell.internal, host.openshell.internal
✓ Policy version 13 submitted (hash: a176881916b5)
✓ Policy version 13 loaded (active version: 13)
Applied preset: local-inference
✓ Deployment verified — gateway and dashboard are healthy.
OpenClaw version: 2026.4.24
──────────────────────────────────────────────────
Sandbox my-assistant (Landlock + seccomp + netns)
Model nemotron3:33b (Local Ollama)
──────────────────────────────────────────────────
Run: nemoclaw my-assistant connect
Status: nemoclaw my-assistant status
Logs: nemoclaw my-assistant logs --follow
OpenClaw UI (auth token redacted from displayed URLs)
Port 18789 must be forwarded before opening these URLs.
Dashboard: http://127.0.0.1:18789/
Token: nemoclaw my-assistant gateway-token --quiet
append #token=<token> locally if the browser asks for auth.
──────────────────────────────────────────────────
To change settings later:
Model: nemoclaw inference set --model <model> --provider <provider> --sandbox my-assistant
Policies: nemoclaw my-assistant policy-add
Credentials: nemoclaw credentials reset <KEY> then nemoclaw onboard
seeed@seeed:~$
Considerando que talvez precisemos acessar serviços implantados na máquina host a partir do contêiner NeMoClaw no futuro, execute o seguinte comando para configurar o acesso de rede para este aplicativo.
nemoclaw my-assistant policy-add --from-file ~/rebot_arm_service/host-camera.yaml --yes
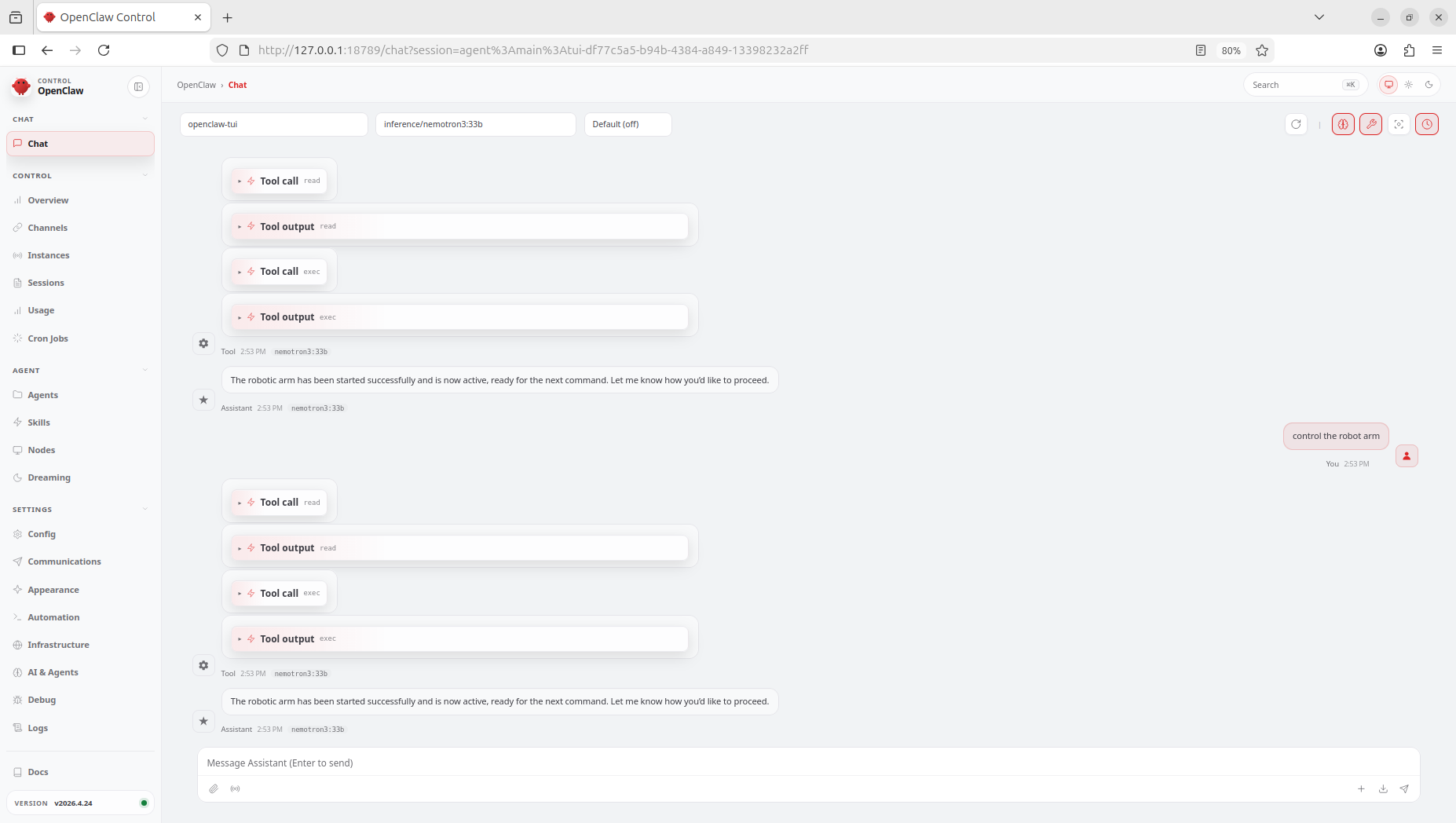
Se o onboarding for bem-sucedido, execute:
nemoclaw my-assistant connect
Você deve entrar em um ambiente funcional do aplicativo OpenClaw:
Mais detalhes do NemoClaw CLI: https://docs.nvidia.com/nemoclaw/latest/reference/cli-selection-guide.html
4.3 Instalar o serviço do braço robótico
Execute no Jetson:
git clone https://github.com/yuyoujiang/rebot_arm_service.git ~
cd ~/rebot_arm_service
uv sync
# Configure GPU PyTorch runtime libraries
export LD_LIBRARY_PATH=/home/seeed/rebot_arm_service/.venv/lib/python3.12/site-packages/nvpl/lib:/usr/local/lib/ollama/cuda_v12:$LD_LIBRARY_PATH
python -c "import torch; print(torch.cuda.is_available())"

5. Configuração de permissão do dispositivo
Existem duas maneiras de configurar a permissão do dispositivo.
- Permissão temporária (perdida após reinicialização):
sudo chmod 666 /dev/ttyACM0
- Regra udev persistente (recomendado):
echo 'SUBSYSTEM=="tty", KERNEL=="ttyACM0", MODE:="0666", GROUP:="dialout"' | sudo tee /etc/udev/rules.d/99-rebot-arm.rules
sudo udevadm control --reload-rules
sudo udevadm trigger
6. Iniciar serviços
6.1 Iniciar backend do braço robótico
cd ~/rebot_arm_service
export REBOT_CAMERA_DEVICE_INDEX=0
uv run rebot-arm-service
Acesso:
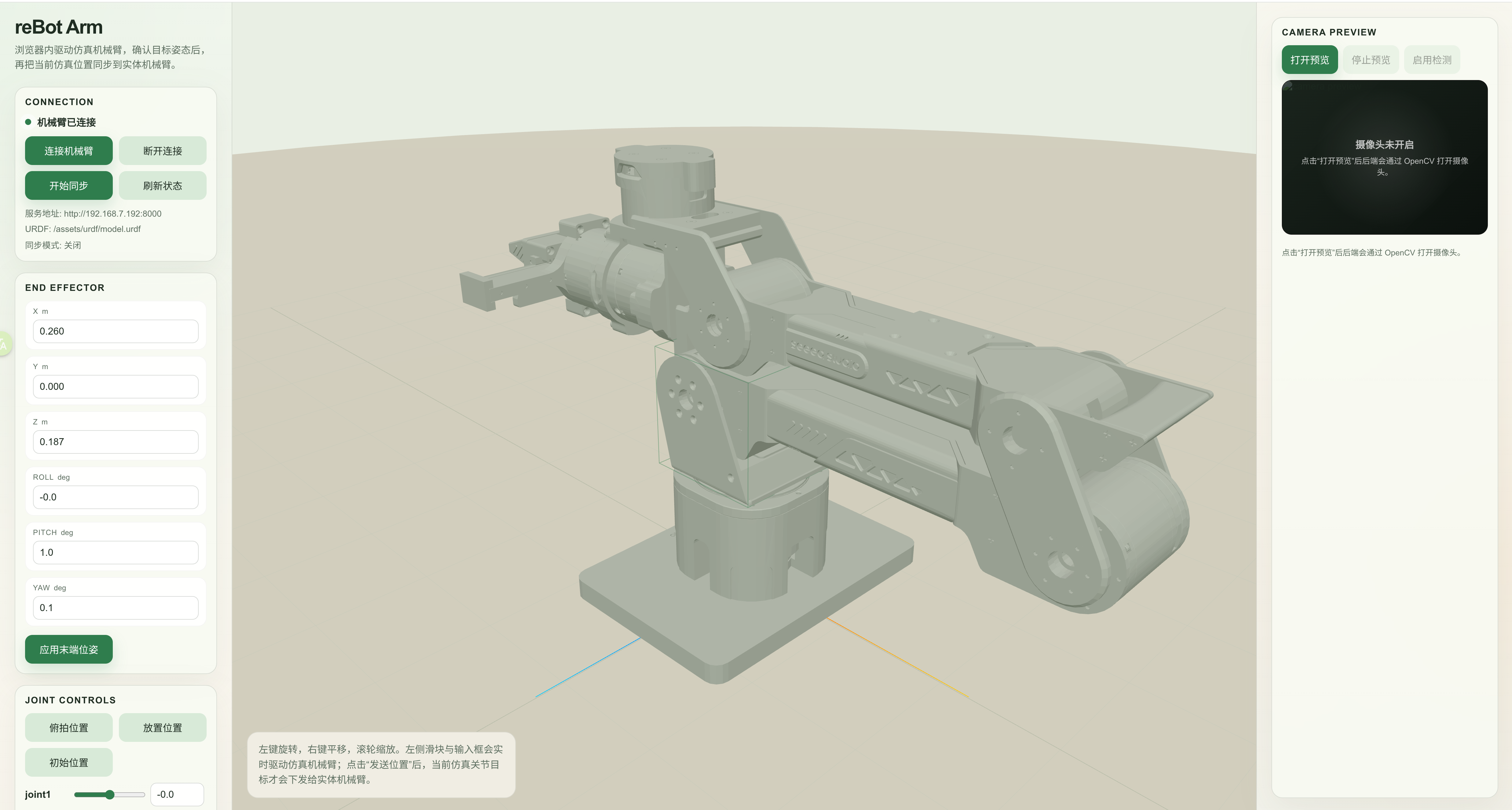
- WebUI:
http://127.0.0.1:8000/webui - Verificação de integridade:
http://127.0.0.1:8000/healthz
6.2 Iniciar listener de teclado (Opcional)
Para acionar rapidamente detecção/agarre (sem esperar por um longo raciocínio do agente), use o listener de tecla de atalho F1.
Quando F1 é pressionado, ele solicita automaticamente o endpoint da missão de agarre.
Executar diretamente:
cd ~/rebot_arm_service
sudo ./.venv/bin/python scripts/space_mission_listener_evdev.py
Ou via script:
cd ~/rebot_arm_service
./scripts/start_space_listener_evdev.sh
6.3 Habilitar inicialização automática na partida (Opcional)
Configure dois serviços systemd:
rebot-arm.service: serviço de backend
/etc/systemd/system/rebot-arm.service
[Unit]
Description=reBot Arm Backend Service
After=network-online.target
Wants=network-online.target
[Service]
Type=simple
User=seeed
WorkingDirectory=/home/seeed/rebot_arm_service
Environment=PYTHONUNBUFFERED=1
Environment=LD_LIBRARY_PATH=/home/seeed/rebot_arm_service/.venv/lib/python3.12/site-packages/nvpl/lib:/usr/local/lib/ollama/cuda_v12
ExecStart=/home/seeed/rebot_arm_service/.venv/bin/rebot-arm-service
Restart=always
RestartSec=2
[Install]
WantedBy=multi-user.target
rebot-f1-listener.service: gatilho de tecla de atalho F1
/etc/systemd/system/rebot-f1-listener.service
[Unit]
Description=reBot F1 Keyboard Listener
After=network-online.target rebot-arm.service
Wants=network-online.target
Requires=rebot-arm.service
[Service]
Type=simple
User=root
WorkingDirectory=/home/seeed/rebot_arm_service
Environment=PYTHONUNBUFFERED=1
Environment=MISSION_BASE_URL=http://127.0.0.1:8000
ExecStart=/home/seeed/rebot_arm_service/.venv/bin/python /home/seeed/rebot_arm_service/scripts/space_mission_listener_evdev.py
Restart=always
RestartSec=2
[Install]
WantedBy=multi-user.target
Modifique o caminho no arquivo de configuração antes de iniciar o serviço.
Comandos de gerenciamento:
sudo systemctl daemon-reload
sudo systemctl enable --now rebot-arm.service rebot-f1-listener.service
systemctl status rebot-arm.service
sudo systemctl status rebot-f1-listener.service
Logs:
journalctl -u rebot-arm.service -f
sudo journalctl -u rebot-f1-listener.service -f
7. Demonstração de recursos
8. Solução de problemas
-
Porta serial ocupada (
Device or resource busy)
Interrompa processos obsoletos e reconecte. Certifique-se de que apenas um processo controlador esteja usando o braço. -
Cena vazia no WebUI
Verifique se as requisições de URDF e malha retornam200, especialmente/assets/urdf/.... -
A detecção não responde
Verifique secamera/statusestá comrunning=true, depois verifique o endpoint de status da missão. -
Falha ao importar Torch com bibliotecas ausentes
Certifique-se de queLD_LIBRARY_PATHinclua os caminhos denvplecuda_v12. -
A tecla de atalho F1 não tem efeito
Verifique os logs derebot-f1-listener.servicee confirme se ele está escutando o dispositivo de teclado correto. -
Outras teclas do teclado param de funcionar após o início do listener
Certifique-se de que o script não usedev.grab()(a captura exclusiva do teclado deve ser removida). -
Falha na conexão do segundo braço
Certifique-se de que a conexão anterior foi totalmente liberada; chame disconnect antes de reconectar.
9. Referências
- https://docs.nvidia.com/jetson/agx-thor-devkit/user-guide/latest/index.html
- https://github.com/Seeed-Projects/reBot-DevArm
- https://docs.nvidia.com/nemoclaw/latest/about/overview.html
- https://docs.openclaw.ai/
- https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/
10. Suporte técnico e discussão de produtos
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.