DM_Gripper – Guia de Montagem Open-Source
A DM_Gripper é uma garra robótica impressa em 3D, open-source, projetada em torno do motor DM-4310-2EC. Seu design modular enfatiza a facilidade de montagem e desmontagem, permitindo que entusiastas e desenvolvedores de robótica prototipem, personalizem e escalem seus projetos rapidamente.
Totalmente compatível com atuadores DAMIAO, a DM_Gripper também oferece flexibilidade para integração com outras marcas de atuadores. Seu exclusivo sistema de garras intercambiáveis permite que os usuários troquem rapidamente garras de diferentes formatos, suportando diversas tarefas e casos de uso em robótica.
Todas as peças da garra são totalmente imprimíveis em 3D, com requisitos mínimos de suporte, tornando o projeto acessível para makers, pesquisadores e engenheiros.
Este wiki inclui:
- Visão geral do projeto do mecanismo
- Lista completa de materiais (BOM)
- Guia e configuração de impressão 3D
- Instruções de montagem passo a passo
- Demonstrações e casos de uso práticos
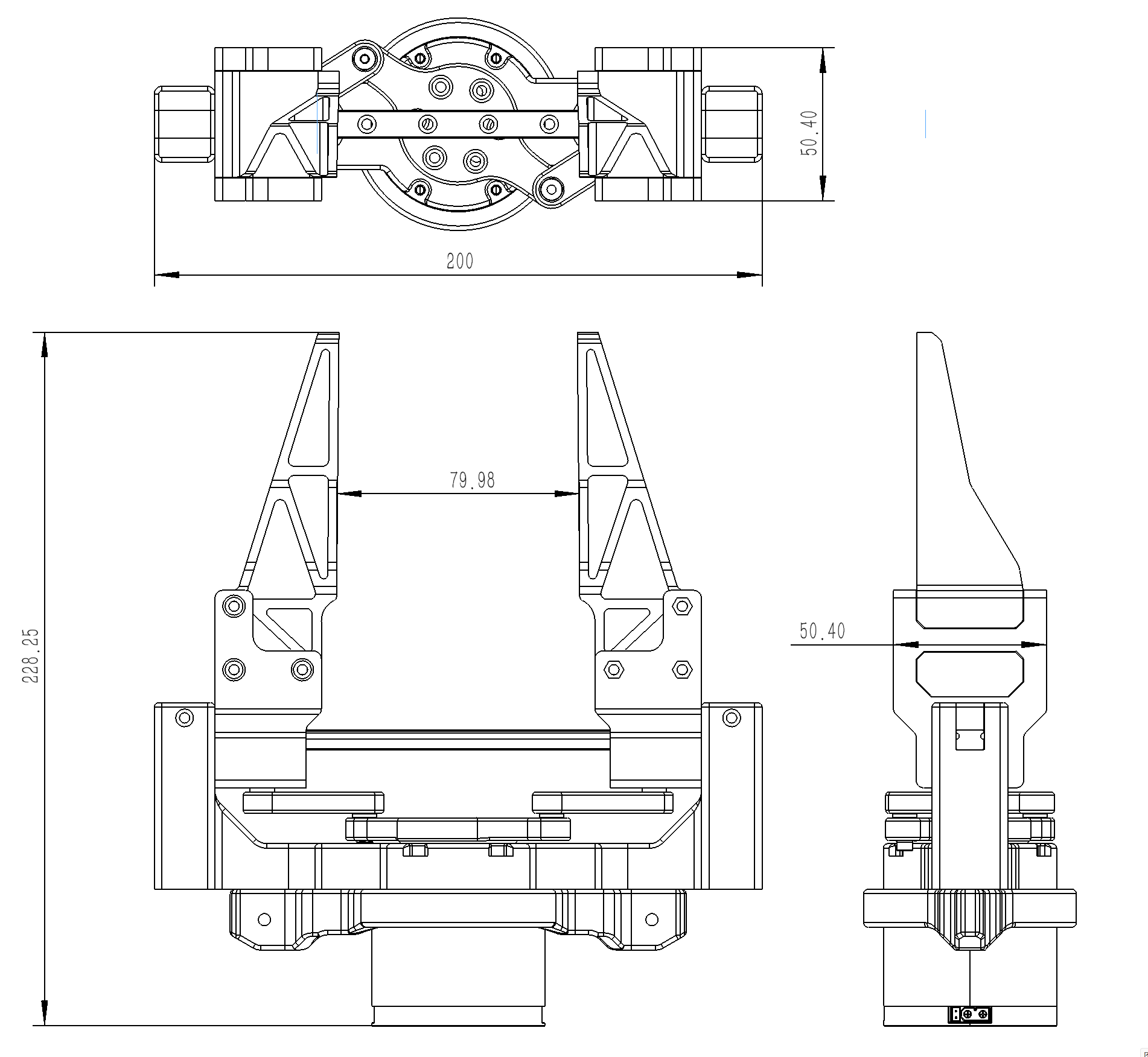
Dimensões/Faixa de Operação
As dimensões e a faixa de operação são mostradas abaixo em milímetros, com altura variável dependendo das garras utilizadas.
Mecanismos de Acionamento
Esta garra utiliza um mecanismo clássico de manivela e guia deslizante duplo (Dual Crank & Slider), que converte movimento rotacional em movimento axial.
- Demonstração de Manivela & Guia Deslizante:

- Demonstração da Simulação de Movimento
BOM
🔩 Fixadores
| Nome | Quantidade |
|---|---|
| Parafuso Philips Cabeça Panela PM3×8 | 8 |
| Parafuso Allen Cabeça Cilíndrica M3×20 | 4 |
| Parafuso Allen Cabeça Cilíndrica M3×25 | 6 |
| Parafuso Allen Cabeça Cilíndrica M3×50 | 8 |
| Parafuso Allen Cabeça Cilíndrica M3×16 | 12 |
| Porca Sextavada Auto-Travante de Nylon 304 M3 (Espessura-3,9mm × Largura-5,5mm) | 18 |
| Arruela de Pressão – M3 | 4 |
| Arruela Lisa – M3×7mm (Diâmetro Externo) × 0,5mm (Espessura) | 8 |
⚙️ Rolamento
| Nome | Quantidade |
|---|---|
| Rolamento Axial Miniatura F3-8M (Diâmetro Interno-3mm × Diâmetro Externo-8mm × Espessura-3,5mm) | 4 |
🛠️ Movimento Linear
| Nome | Quantidade |
|---|---|
| Trilho Linear em Aço Inoxidável MGN9, 200 mm | 1 |
| Carro de Trilho Linear MGN9C (Padrão) | 2 |
🔌 Atuador
| Nome | Quantidade |
|---|---|
| Motor DM4310-2EC | 1 |
🧩 Peças Personalizadas Impressas
| Nome | Quantidade |
|---|---|
| Peças Impressas em 3D | 1 conjunto |
Guia de Montagem
Guia de Impressão 3D
-
Se você tiver material de suporte dedicado ou PETG+PLA no seu AMS e quiser o melhor acabamento superficial nas faces com suporte, consulte Este Wiki.
Observação: seu trabalho de impressão pode demorar mais. -
Se você tiver apenas um filamento para imprimir, certifique-se de imprimir com as orientações corretas e decida se precisa das etapas a seguir (Ative ADVANCED no Bambu Studio).
atençãoNão altere a distância Top Z se estiver usando PETG ou ABS. Mantenha o padrão. Altere isso apenas se estiver usando PLA.
-
Passo 1: Layout de impressão com suportes mínimos necessários

-
Passo 2: As configurações de Scarf proporcionam um melhor acabamento superficial, conforme marcado nos retângulos verdes.

-
Passo 3: Minhas configurações de impressão: altura de camada de 0,2mm, densidade de preenchimento de 25%, Estilo – 3D Honeycomb.




-
Passo a Passo da Montagem
- Passo 1: Fixe os suportes das garras nos carrinhos MGN9C com oito parafusos cogumelo M3×8
- Passo 2: Empilhe os rolamentos, rotores e bielas (estilo "hambúrguer")
- Passo 3: Coloque oito arruelas M7 acima e abaixo das ranhuras
- Passo 4: Coloque quatro porcas acima e abaixo das arruelas
- Passo 5: Rosqueie quatro pares de parafusos M3×20 e arruelas de pressão nas porcas (use alicate se necessário)
- Passo 6: Posicione a base e o atuador; os padrões na placa do rotor e no atuador devem se alinhar
- Passo 7: Aperte seis parafusos M3×16 para fixar a placa do rotor ao atuador
- Passo 8: Empurre a base da garra até o curso máximo para as próximas etapas
- Passo 9: Fixe o suporte da came na parte inferior
- Passo 10: Fixe o suporte da came com quatro pares de parafusos M3×25 e porcas
- Passo 11: Fixe a base com seis parafusos M3×16 (Puxe o trilho para fora nesta etapa e depois deslize-o de volta)
- Passo 12: Use dois pares de parafusos M3×50 e porcas para travar o trilho na base
- Passo 13: Deslize o pressionador do trilho para dentro e fixe com dois pares de parafusos M3×25 e porcas
- Passo 14: Coloque as garras nos suportes das garras e fixe-as com seis pares de parafusos M3×50 e porcas
Demos e Arquivos CAD
- Siga o Damiao Actuators Wiki para configurar tudo, caso ainda não tenha feito isso.
- Siga o Torque Controller Demo (muitos agradecimentos a tianrking) para colocar a garra em movimento com uma GUI legal.

- Os recursos CAD: arquivos STEP editáveis e STLs estão disponíveis aqui.