Estendendo MCP com Grove
Visão Geral
Este documento descreve como usar o sensor de temperatura e umidade DHT20 por meio da interface Grove na placa de desenvolvimento SenseCAP Watcher baseada em ESP32-S3.
Preparação de Hardware
| SenseCAP Watcher para XiaoZhi | Grove - Sensor de Temperatura e Umidade V2.0 (DHT20) |
|---|---|
 |  |
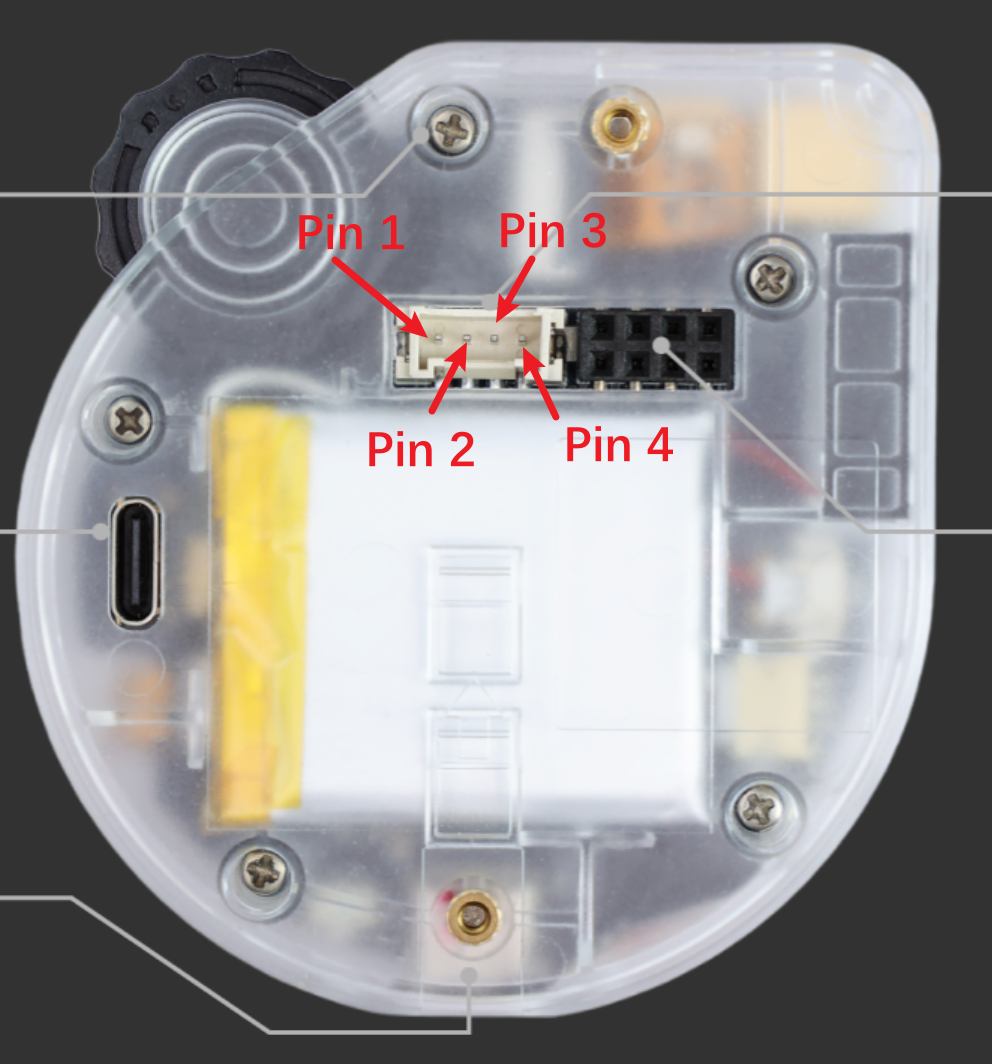
Definição da Interface Grove (J5)
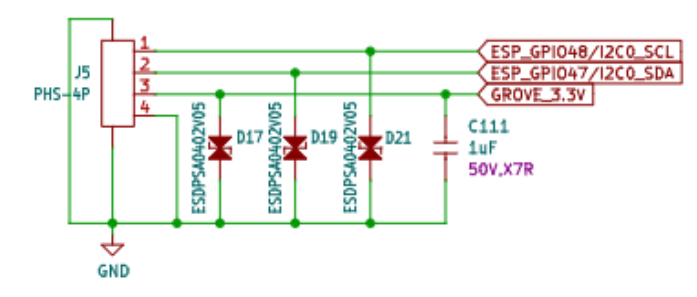
De acordo com o diagrama de hardware, a interface Grove usa os seguintes pinos:
| Pino Grove | Função | Conexão ESP32-S3 |
|---|---|---|
| Pino 1 | SCL | GPIO48 (I2C0_SCL) |
| Pino 2 | SDA | GPIO47 (I2C0_SDA) |
| Pino 3 | VCC | GROVE_3.3V (Alimentação 3,3V) |
| Pino 4 | GND | GND |
Sensor DHT20
- Endereço I2C: 0x38 (fixo, não pode ser alterado)
- Tensão de Alimentação: 2,0V - 5,5V (use 3,3V)
- Protocolo de Comunicação: I2C (até 400kHz)
- Faixa de Medição:
- Temperatura: -40°C a +80°C (Precisão: ±0,5°C)
- Umidade: 0% a 100% UR (Precisão: ±3% UR)
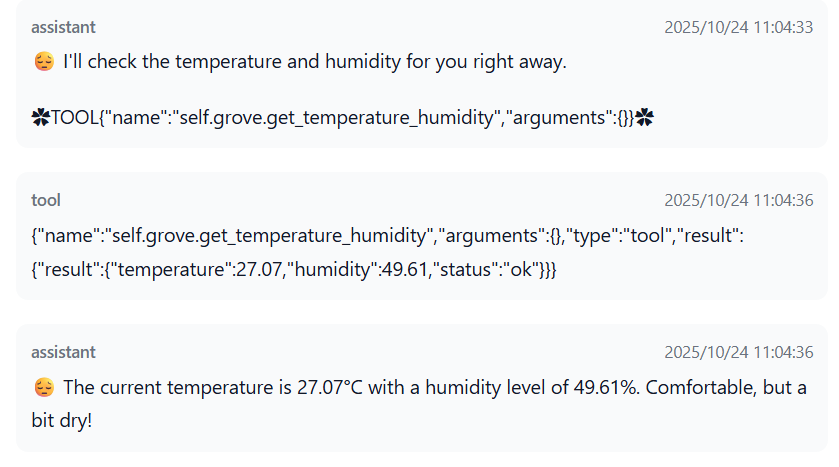
Resultado da Execução
Estrutura de Arquivos
Código Original:
Novos arquivos:
-
Você deve colocar os dois arquivos acima no seguinte local:
- localização do arquivo
main/boards/sensecap-watcher/
├── dht20.h # DHT20 driver header
└── dht20.cc # DHT20 driver implementation
- localização do arquivo
Arquivos modificados
-
Consulte Funcionalidade Principal (Interface Interna da Ferramenta MCP) para a parte de código modificada.
-
Você deve substituir o arquivo acima no seguinte local:
- localização do arquivo
main/boards/sensecap-watcher/
└── sensecap_watcher.cc # Integrates DHT20 sensor and MCP tool
- localização do arquivo
O código de exemplo acima é apenas para referência. Você deve modificá-lo de acordo com o modelo específico do seu sensor, ambiente de desenvolvimento e versão do firmware para garantir a integração correta e a compilação bem-sucedida.
- Sensores Grove I2C podem ser conectados diretamente ao barramento I2C.
- Sensores não I2C podem ser conectados por meio de pinos GPIO disponíveis, permitindo a integração flexível de vários tipos de sensores.
Funcionalidade Principal (Sensor DHT20)
1. Inicialização do Sensor
O driver do DHT20 implementa o processo completo de inicialização:
- Passo 1. Reiniciar o sensor: enviar comando 0xBA de reset
- Passo 2. Configuração do sistema: escrever [0x08, 0x00] no registrador 0xE1
- Passo 3. Verificação de calibração: verificar o bit[3] do registrador de status para garantir que o sensor esteja calibrado
- Passo 4. Mecanismo de nova tentativa: tentar novamente até 5 vezes se a calibração falhar
esp_err_t ret = dht20_sensor_->Initialize();
if (ret == ESP_OK) {
ESP_LOGI(TAG, "DHT20 initialized successfully");
}
2. Leitura de Temperatura e Umidade
Processo de leitura:
- Passo 1. Disparar medição: enviar comando [0xAC, 0x33, 0x00]
- Passo 2. Aguardar a medição: atraso de 80ms
- Passo 3. Ler 8 bytes: [status, umidade Alta, Média, Baixa | temperatura Alta, Média, Baixa, CRC]
- Passo 4. Análise de dados:
- Umidade = (valor bruto de 20 bits) × 100 / 2^20
- Temperatura = (valor bruto de 20 bits) × 200 / 2^20 - 50
float temperature, humidity;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret == ESP_OK) {
printf("Temperature: %.2f°C, Humidity: %.2f%%\n", temperature, humidity);
}
3. Protocolo de Comunicação I2C
| Função | Comando/Registrador | Dados |
|---|---|---|
| Reiniciar Sensor | 0xBA | - |
| Registrador de Configuração | 0xE1 | [0x08, 0x00] |
| Disparar Medição | - | [0xAC, 0x33, 0x00] |
| Ler Status | - | 1 byte |
| Ler Dados | - | 7 bytes |
4. Definição do Byte de Status
| Bit | Função | Valor |
|---|---|---|
| bit[7] | Status de Medição | 1=Medindo, 0=Ocioso |
| bit[6:4] | Reservado | - |
| bit[3] | Status de Calibração | 1=Calibrado, 0=Não Calibrado |
| bit[2:0] | Reservado | - |
5. Algoritmo de Análise de Dados
// Humidity data (20 bits)
uint32_t humidity_raw = (data[1] << 12) | (data[2] << 4) | (data[3] >> 4);
float humidity = humidity_raw * 100.0f / 1048576.0f;
// Temperature data (20 bits)
uint32_t temperature_raw = ((data[3] & 0x0F) << 16) | (data[4] << 8) | data[5];
float temperature = temperature_raw * 200.0f / 1048576.0f - 50.0f;
Funcionalidade Principal (Interface Interna da Ferramenta MCP)
1. Descrição da Função
- Nome da ferramenta :
self.grove.get_temperature_humidity - Aplicação da ferramenta : Ler a temperatura e a umidade atuais do sensor DHT20 conectado via Grove
2. Exemplo de Chamada
A IA pode chamá-la da seguinte forma:
result = call_tool("self.grove.get_temperature_humidity", {})
3. Formato de Retorno
-
Sucesso:
{
"temperature": 25.32,
"humidity": 65.47,
"status": "ok"
} -
Falha:
{
"error": "DHT20 sensor not initialized"
}ou
{
"error": "Failed to read DHT20: ESP_ERR_TIMEOUT"
}
4. Parte do Código Modificada e Explicação
Inclusão de Arquivos de Cabeçalho Adicionados
-
Adicione as seguintes declarações
includeno início desensecap_watcher.cc:#include "dht20.h"
#include "mcp_server.h" -
Finalidade
-
dht20.h — Introduz as APIs do driver para o sensor DHT20, permitindo a leitura de temperatura e umidade.
-
mcp_server.h — Fornece APIs relacionadas ao servidor MCP interno, permitindo a comunicação e o registro de ferramentas MCP.
-
Variável Membro Adicionada
-
Adicione a seguinte variável membro na classe
SensecapWatcher:DHT20* dht20_sensor_ = nullptr; -
Finalidade
dht20_sensor_— Um ponteiro para o objeto do sensor DHT20 conectado via interface Grove.
Ele é usado para inicializar, armazenar e acessar o sensor de temperatura e umidade durante todo o ciclo de vida da instância deSensecapWatcher.- Ele é atribuído em
InitializeDHT20()e usado pelas ferramentas MCP para ler os dados do sensor. - Inicializado como
nullptrpara indicar que o sensor ainda não foi configurado, com verificações de nulo realizadas antes da leitura.
Inicialização do DHT20 e Ferramenta MCP Adicionadas
-
Adicione a seguinte função membro na classe
SensecapWatcher:void InitializeDHT20() {
ESP_LOGI(TAG, "Initialize DHT20 sensor on Grove port");
// Create DHT20 sensor instance
dht20_sensor_ = new DHT20(i2c_bus_);
// Initialize and calibrate the sensor
esp_err_t ret = dht20_sensor_->Initialize();
if (ret != ESP_OK) {
ESP_LOGE(TAG, "DHT20 initialization failed: %s", esp_err_to_name(ret));
delete dht20_sensor_;
dht20_sensor_ = nullptr;
return;
}
ESP_LOGI(TAG, "DHT20 sensor initialized successfully");
// Register MCP tool for reading temperature and humidity
auto& mcp_server = McpServer::GetInstance();
mcp_server.AddTool("self.grove.get_temperature_humidity",
"Read temperature and humidity from the Grove-connected DHT20 sensor.\n"
"Return format: {\"temperature\": value(°C), \"humidity\": value(%), \"status\": \"ok\"}\n"
"If reading fails, returns an error message.",
PropertyList(),
[this](const PropertyList&) -> ReturnValue {
if (!dht20_sensor_) {
return "{\"error\": \"DHT20 sensor not initialized\"}";
}
float temperature = 0.0f;
float humidity = 0.0f;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret != ESP_OK) {
std::string error_msg = "{\"error\": \"Failed to read DHT20: ";
error_msg += esp_err_to_name(ret);
error_msg += "\"}";
return error_msg;
}
// Format response as JSON
char buffer[128];
snprintf(buffer, sizeof(buffer),
"{\"temperature\": %.2f, \"humidity\": %.2f, \"status\": \"ok\"}",
temperature, humidity);
return std::string(buffer);
});
ESP_LOGI(TAG, "DHT20 MCP tool registered: self.grove.get_temperature_humidity");
} -
Adicionar chamada de inicialização do DHT20 no construtor
SensecapWatcher() {
...
InitializeCamera();
InitializeDHT20(); // Initialize Grove DHT20 sensor
} -
Objetivo
InitializeDHT20()— Inicializa o sensor DHT20 na interface Grove e registra uma ferramenta MCP para permitir acesso interno aos dados de temperatura e umidade.- A função cria a instância
DHT20, faz a calibração e verifica erros de inicialização. - Se a inicialização for bem-sucedida, registra a ferramenta MCP
self.grove.get_temperature_humiditypara leitura dos dados do sensor via JSON. - Chamada no construtor de
SensecapWatcherpara garantir que o sensor esteja pronto quando a placa iniciar:
Solução de Problemas
Problemas Comuns
- Falha na Inicialização do Sensor
- Possíveis Causas:
- Interface Grove não alimentada corretamente
- Problemas na conexão I2C
- Sensor não conectado ou danificado
- Solução
uint32_t grove_power = esp_io_expander_get_level(io_exp_handle, BSP_PWR_GROVE);
ESP_LOGI(TAG, "Grove power status: %d", grove_power);
- Tempo de Leitura Esgotado (Timeout)
- Possíveis Causas:
- Sensor ocupado
- Conflito no barramento I2C
- Solução
- Garantir intervalo ≥1s entre leituras
- Verificar outros dispositivos no I2C
- Dados Inválidos
- Possíveis Causas:
- Sensor não calibrado
- Verificação de CRC falhou (não implementada na versão atual)
- Solução:
- Reinicializar o sensor
- Considerar implementar verificação de CRC (data[6])
Referências
Manutenção
o código reside em main/boards/sensecap-watcher/, não afeta outras placas.