Ajustar Finamente GR00T N1.5 para o Braço LeRobot SO-101 e Implantar no Jetson AGX Thor
Introdução
Este wiki explica como ajustar finamente o NVIDIA Isaac GR00T N1.5 para o braço LeRobot SO-101 e implantá-lo no NVIDIA Jetson Thor. Ele abrange:
- Preparação de hardware para LeRobot SO-101 e Jetson AGX Thor
- Configuração do ambiente de software para GR00T N1.5 no Jetson Thor
- Uso da plataforma de treinamento LeRobot: coleta de dados, formatação de conjunto de dados e ajuste fino para o braço SO-101
- Fluxos de trabalho de exemplo para implantar a política GR00T N1.5 treinada (LeRobot + SO-101) no Jetson Thor
- Dicas de solução de problemas e armadilhas comuns

Instruções detalhadas passo a passo e documentação de referência são fornecidas para ajudar você a ir da configuração inicial até a implantação completa.
Primeiros Passos com o Kit de Desenvolvimento NVIDIA Jetson Thor
Visão Geral do Jetson Thor
O Kit de Desenvolvimento NVIDIA® Jetson AGX Thor™ é uma potência para IA física e robótica humanoide. Ele é construído em torno da GPU NVIDIA Blackwell e inclui 128 GB de memória de alta velocidade, fornecendo até 2.070 FP4 TFLOPS de computação de IA enquanto opera dentro de um envelope de energia de 40-130 W (uso comum até 130 W).
Você pode adquirir o Kit de Desenvolvimento Jetson AGX Thor na Seeed Studio aqui: Seeed – NVIDIA Jetson AGX Thor™ Developer Kit

Os itens de hardware incluídos na caixa são uma unidade Thor e um adaptador de energia:
Gravando a Imagem de Sistema do Thor
Em 10 de setembro de 2025, a versão mais recente disponível da imagem de sistema para o Thor é 38.2. Se você precisar regravar o sistema para o Thor, siga as instruções nesta seção. Itens Necessários para a Gravação:
- Um dispositivo host com mais de 25 GB de espaço livre em disco (Ubuntu ou Windows OS suportado)
- Uma unidade USB com capacidade de pelo menos 16 GB
- Um monitor e cabo de exibição DP/HDMI
- Um ambiente de alimentação capaz de fornecer mais de 240 W
- Um teclado com interface USB
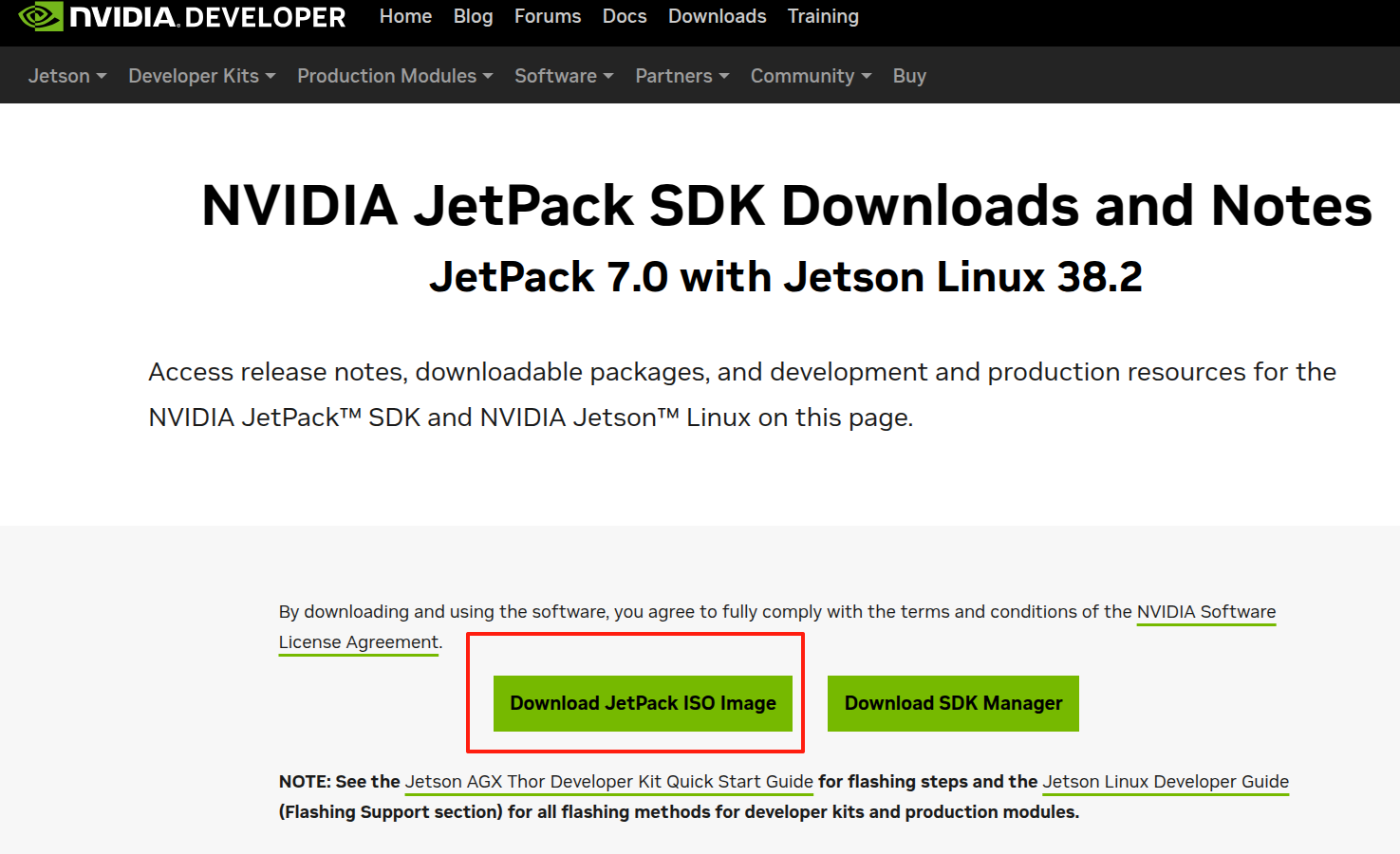
Primeiro, baixe a imagem de sistema em formato ISO para o Thor a partir do site oficial da NVIDIA. Clique aqui para visitar a página de download:
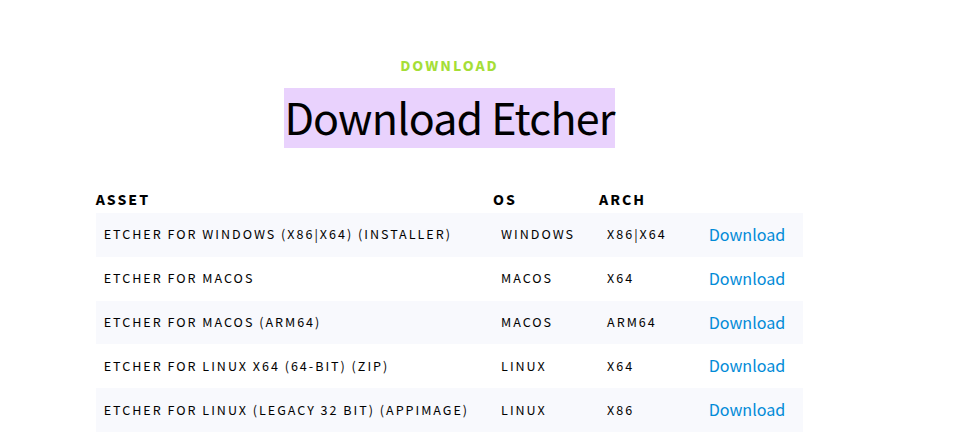
Instale o Balena Etcher na máquina host. Para baixar o instalador, clique aqui e selecione a versão apropriada com base no sistema operacional do host:
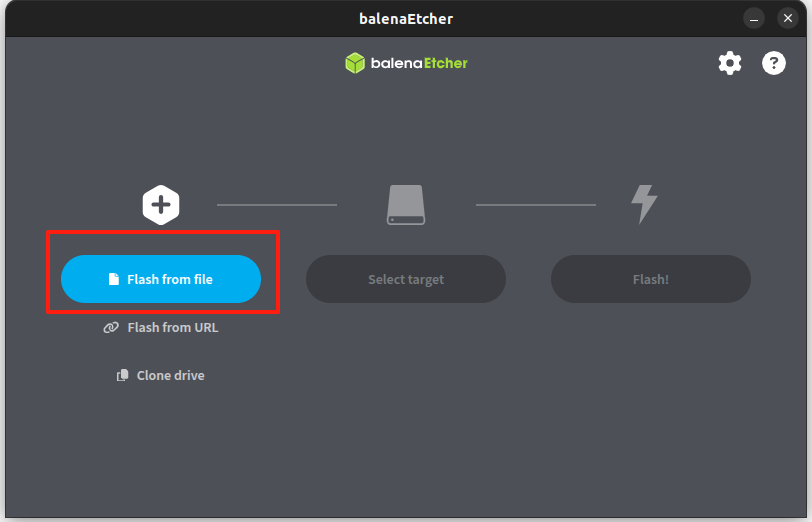
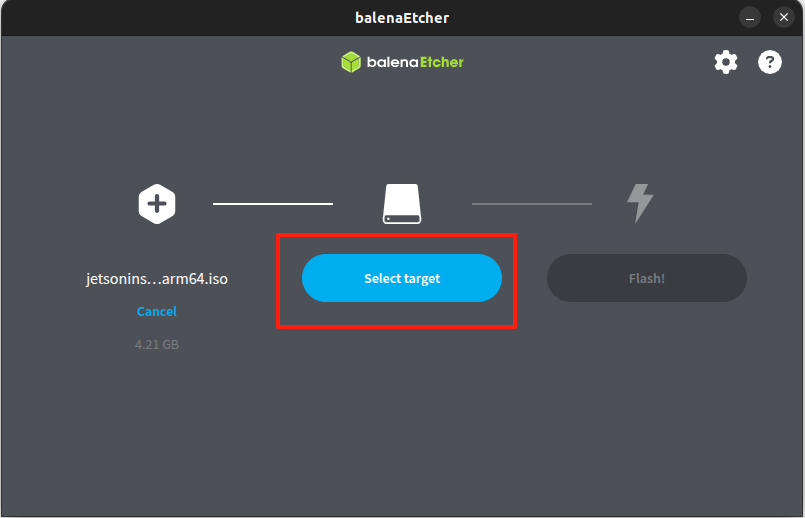
Após baixar o arquivo de imagem ISO e instalar com sucesso o Balena Etcher, insira a unidade USB na máquina host. Em seguida, inicie o Balena Etcher para criar uma unidade USB inicializável para gravar o Thor:
Este processo irá formatar a unidade USB. Certifique-se de fazer backup de todos os dados importantes com antecedência.
Selecione o arquivo de imagem ISO baixado no seu armazenamento local e depois escolha o dispositivo de destino — ou seja, sua unidade USB.
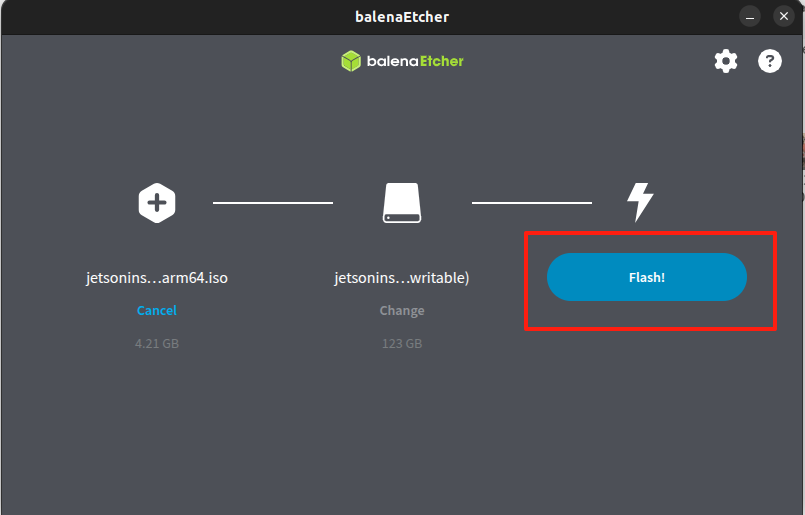
Certifique-se de verificar cuidadosamente o nome do dispositivo de destino e o diretório de montagem! Clique em Flash! e aguarde até que o processo seja concluído. Quando terminar, a unidade USB para gravar o sistema no Thor estará pronta:
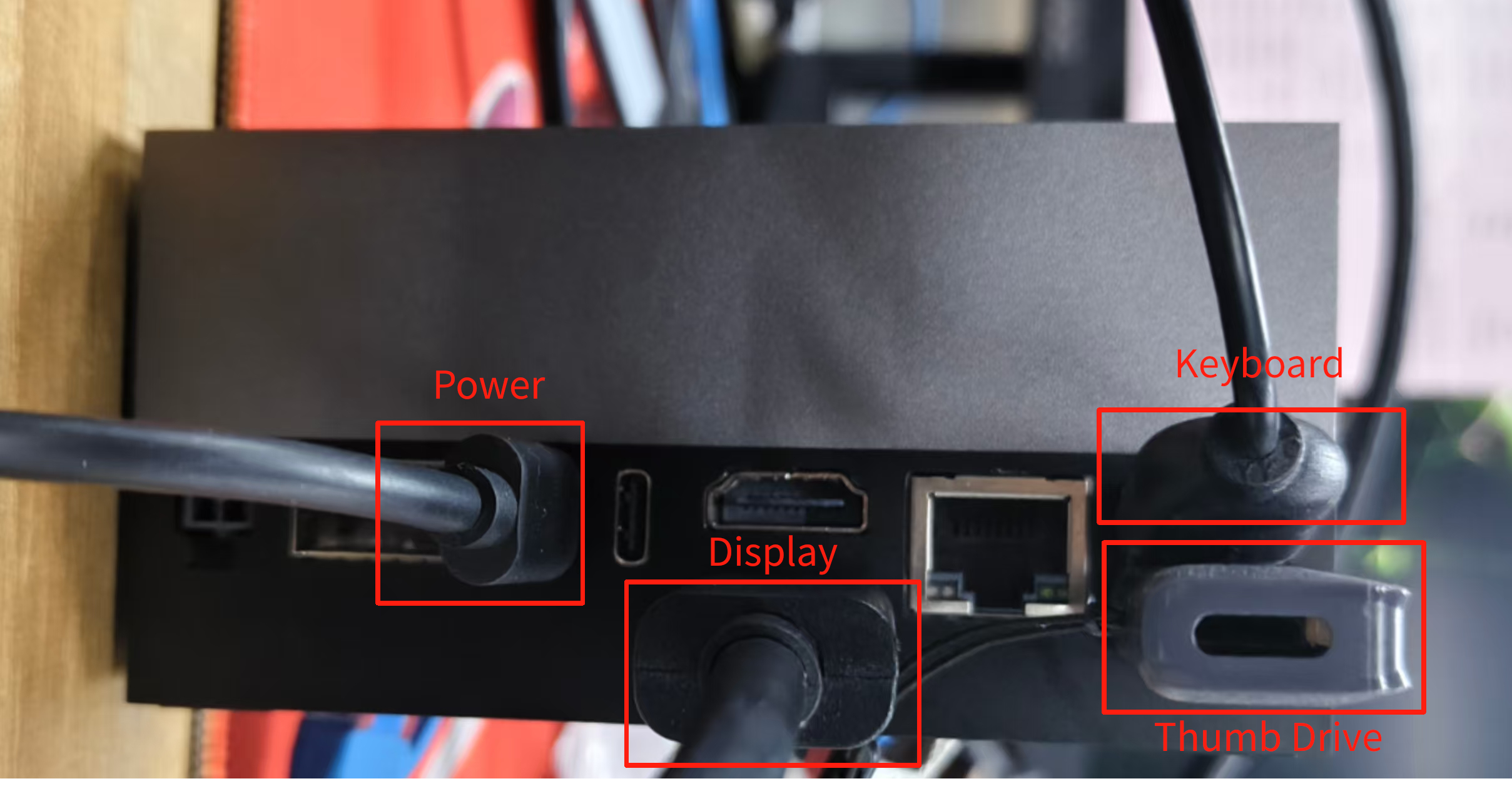
Em seguida, insira a unidade USB preparada, o teclado, o cabo de exibição (DP/HDMI) e a fonte de alimentação (Type-C) na placa Thor para iniciar o processo de gravação.
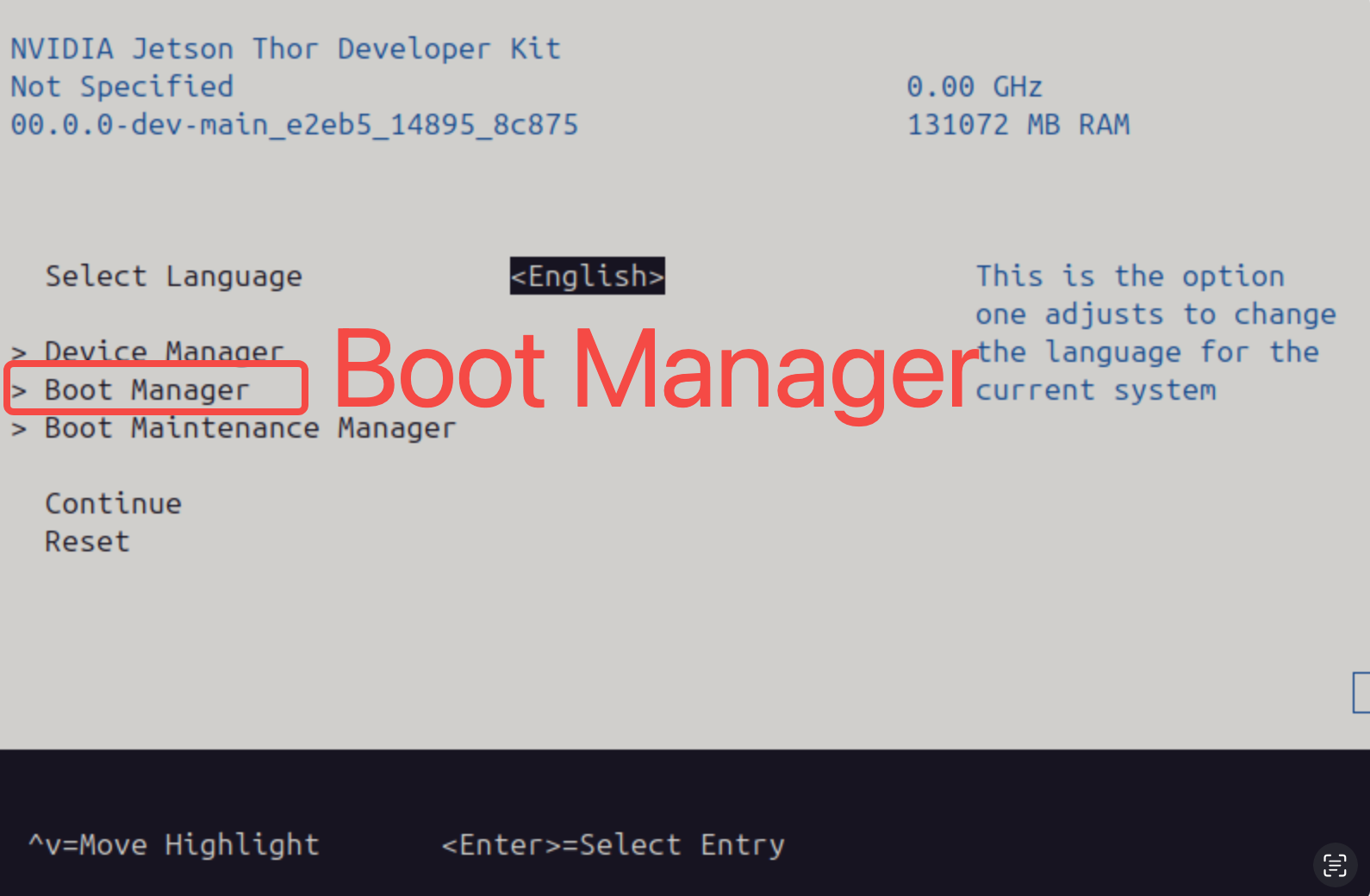
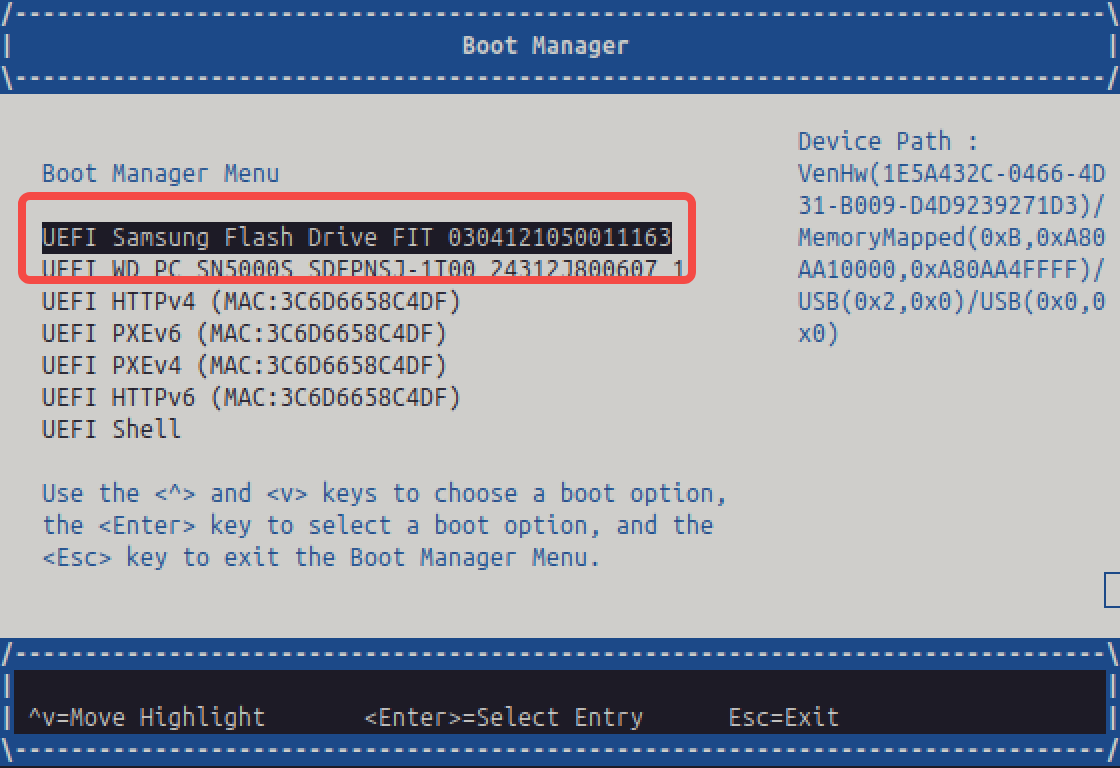
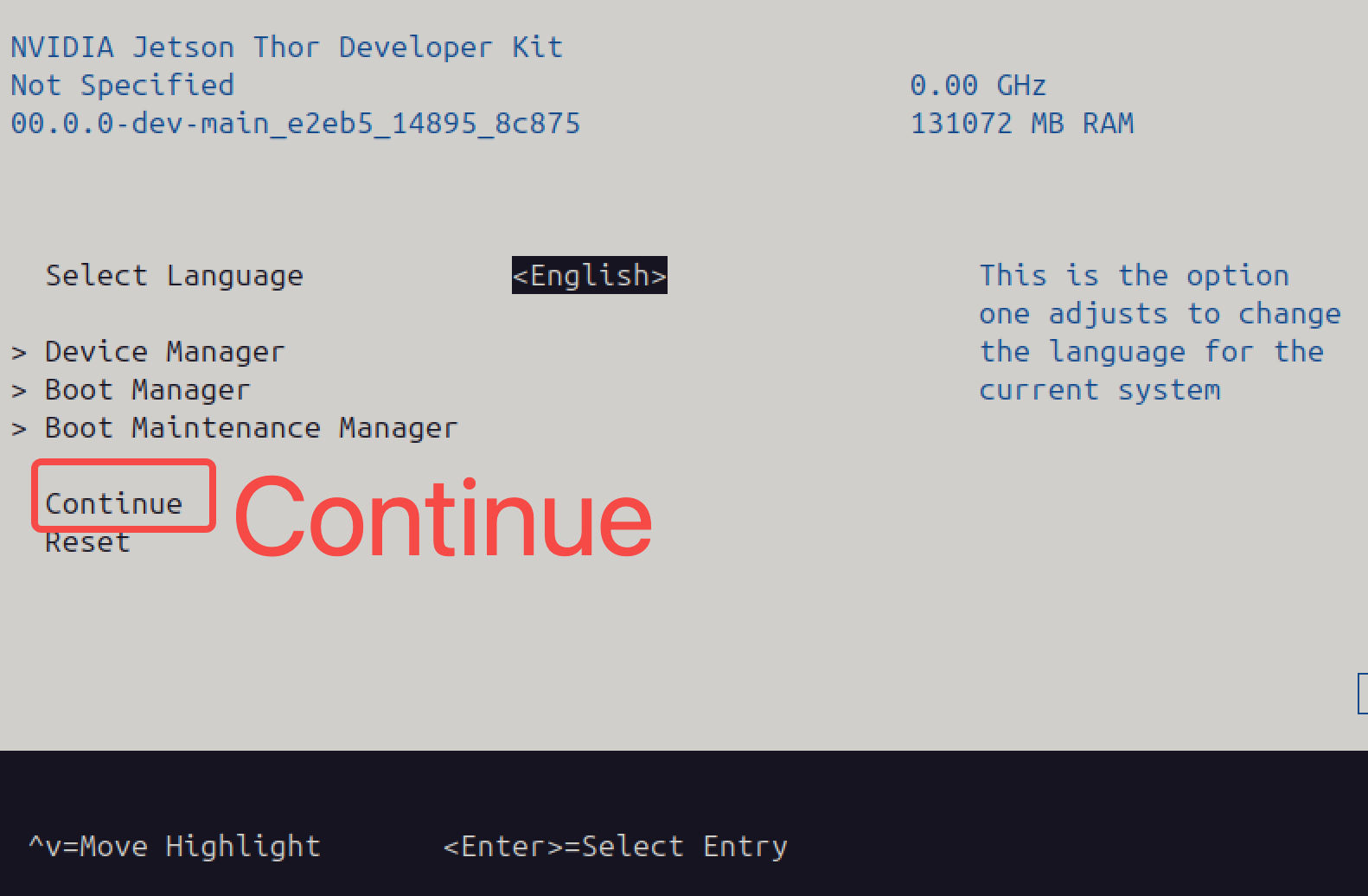
Ligue o Thor e entre na interface de inicialização. Selecione Boot Manager e, em seguida, escolha a unidade USB que foi inserida no Thor (com base no nome da sua unidade USB). Pressione Esc para retornar ao menu anterior e selecione Continue:
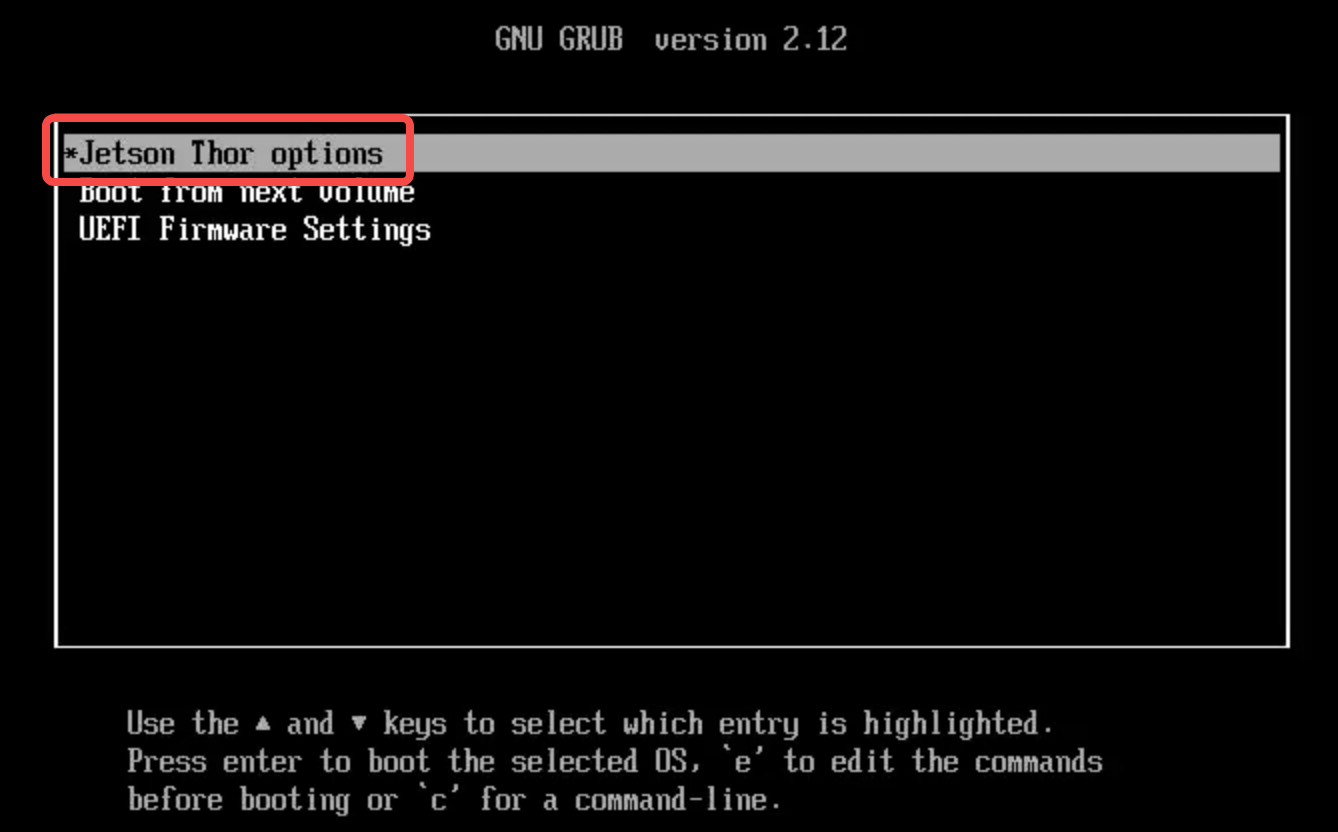
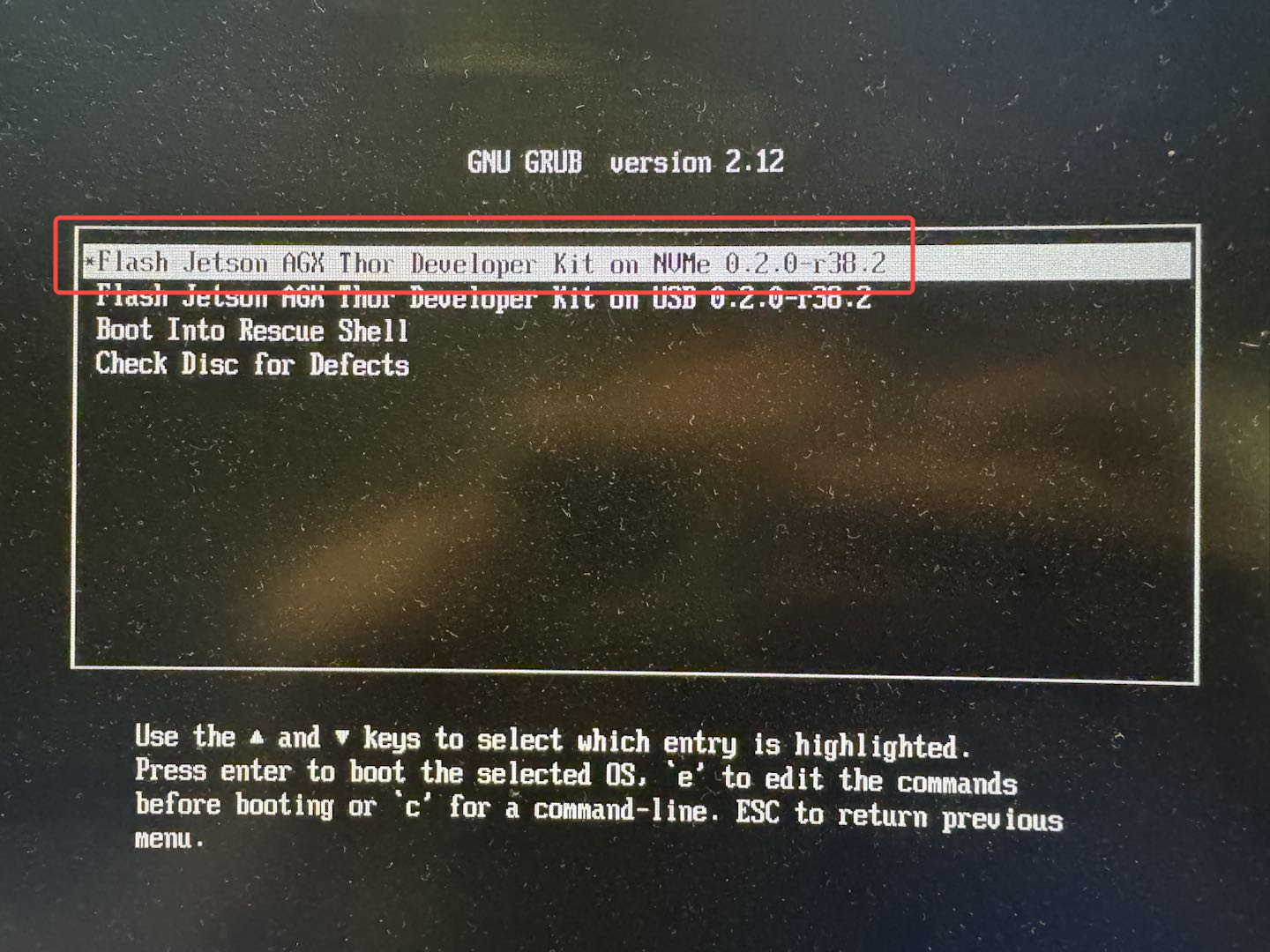
Após uma breve tela preta, a seguinte interface aparecerá. Selecione Jetson Thor options e pressione Enter. Em seguida, escolha a opção
Flash Jetson AGX Thor Developer Kit on NVMe 0.2.0-r38.2 para gravar a imagem de sistema na unidade de estado sólido NVMe do Thor:
Uma grande quantidade de informações de log será exibida na tela. Aguarde aproximadamente 15 minutos. Quando esta etapa for concluída, o dispositivo será reiniciado automaticamente e avançará para a próxima interface. Aguarde até que a barra de Update Progress atinja 100%, o que indica que o processo de gravação foi concluído com sucesso:
Após a gravação, você pode prosseguir com a configuração inicial do sistema:
Esta imagem de sistema não inclui CUDA, TensorRT ou outros componentes de SDK do JetPack.
Configuração Básica do Ambiente de Desenvolvimento no Thor
Esta seção fornece exemplos de como instalar dependências de software comumente usadas no Thor para fins de desenvolvimento. Essas dependências visam facilitar o desenvolvimento subsequente.
Observe que as dependências listadas são apenas para referência — instale pacotes adicionais de acordo com os requisitos de cada projeto individual.
Instalando Dependências Essenciais de Desenvolvimento
Instalação do JetPack SDK
Abra o terminal e execute o seguinte comando. Após uma breve espera, CUDA, TensorRT e outros componentes do SDK serão instalados:
sudo apt update
sudo apt install nvidia-jetpack
Instalação de Navegador
O Firefox foi testado e verificado para rodar de forma estável no Ubuntu 24.04:
sudo apt update
sudo apt install firefox
Instalação do Jtop
Para instalar o jtop, consulte as instruções a seguir.
sudo apt update
sudo apt install python3
sudo apt install python3-pip
sudo pip3 install -U pip
sudo pip3 install jetson-stats
Instalação do Miniconda
O Miniconda é usado para isolar ambientes de desenvolvimento. Para instalar o miniconda, consulte as instruções a seguir:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
conda --version
Instalando a Versão de GPU do PyTorch
Compilar a versão de GPU do PyTorch a partir do código-fonte no Thor pode resultar em problemas de compatibilidade. Para conveniência, fornecemos um arquivo .whl pré-compilado para ajudar os desenvolvedores a configurar rapidamente um ambiente de desenvolvimento com PyTorch no Thor.
Aqui, é fornecido um arquivo wheel pré-compilado para instalar o PyTorch 2.9 no Thor. Este arquivo foi compilado em um ambiente Python 3.10 + CUDA 13.
clique em Python 3.10 + CUDA 13 pytorch2.9 para baixar o arquivo .whl.
clique em Python 3.10 + CUDA 13 torchvision0.24 para baixar o arquivo .whl.
clique em Python 3.10 + CUDA 13 torchvision0.23 para baixar o arquivo .whl.
Outros arquivos .whl de dependências pré-compiladas de Python 3.12 + CUDA 13 para o Thor podem ser encontrados em:
https://pypi.jetson-ai-lab.io/sbsa/cu130.
Se o arquivo wheel esperado não estiver disponível, o desenvolvedor precisará compilar as dependências necessárias por conta própria para concluir a configuração do ambiente de desenvolvimento.
Instalando Dependências Adicionais
Este documento fornece uma imagem Docker de referência para ajudar os desenvolvedores a se adaptarem rapidamente ao ambiente de desenvolvimento do Jetson AGX Thor. Esta imagem é apenas para referência, e os desenvolvedores são livres para decidir se desejam usá-la com base em suas necessidades específicas.
Como o tamanho da imagem excede 40 GB, o download a partir do servidor é relativamente lento.
Esta imagem Docker pode executar de forma estável a inferência do GR00T N1.5. A saída do comando pip list na imagem é a seguinte:
pip.list
Package Version Location Installer Editable project location
------------------------- ----------------- ---------------- -------------------------------------- -------------------------
absl-py 2.3.1 /opt/venv/lib/python3.12/site-packages pip
accelerate 1.2.1 /opt/venv/lib/python3.12/site-packages pip
aiohappyeyeballs 2.6.1 /opt/venv/lib/python3.12/site-packages pip
aiohttp 3.12.15 /opt/venv/lib/python3.12/site-packages pip
aiosignal 1.4.0 /opt/venv/lib/python3.12/site-packages pip
albucore 0.0.17 /opt/venv/lib/python3.12/site-packages pip
albumentations 1.4.18 /opt/venv/lib/python3.12/site-packages pip
annotated-types 0.7.0 /opt/venv/lib/python3.12/site-packages pip
antlr4-python3-runtime 4.9.3 /opt/venv/lib/python3.12/site-packages pip
anyio 4.10.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi 25.1.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi-bindings 25.1.0 /opt/venv/lib/python3.12/site-packages pip
arrow 1.3.0 /opt/venv/lib/python3.12/site-packages pip
asttokens 3.0.0 /opt/venv/lib/python3.12/site-packages pip
astunparse 1.6.3 /opt/venv/lib/python3.12/site-packages pip
async-lru 2.0.5 /opt/venv/lib/python3.12/site-packages pip
attrs 23.2.0 /usr/lib/python3/dist-packages debian
av 12.3.0 /opt/venv/lib/python3.12/site-packages pip
babel 2.17.0 /opt/venv/lib/python3.12/site-packages pip
beautifulsoup4 4.13.5 /opt/venv/lib/python3.12/site-packages pip
bleach 6.2.0 /opt/venv/lib/python3.12/site-packages pip
blessings 1.7 /opt/venv/lib/python3.12/site-packages pip
blinker 1.9.0 /opt/venv/lib/python3.12/site-packages pip
certifi 2025.8.3 /opt/venv/lib/python3.12/site-packages pip
cffi 2.0.0 /opt/venv/lib/python3.12/site-packages pip
charset-normalizer 3.4.3 /opt/venv/lib/python3.12/site-packages pip
click 8.2.1 /opt/venv/lib/python3.12/site-packages pip
cloudpickle 3.1.1 /opt/venv/lib/python3.12/site-packages pip
cmake 3.31.6 /opt/venv/lib/python3.12/site-packages pip
comm 0.2.3 /opt/venv/lib/python3.12/site-packages pip
contourpy 1.3.3 /opt/venv/lib/python3.12/site-packages pip
cramjam 2.11.0 /opt/venv/lib/python3.12/site-packages pip
cryptography 41.0.7 /usr/lib/python3/dist-packages debian
cuda-bindings 13.0.0 /opt/venv/lib/python3.12/site-packages pip
cuda-core 0.3.2 /opt/venv/lib/python3.12/site-packages pip
cuda-pathfinder 1.2.2 /opt/venv/lib/python3.12/site-packages pip
cycler 0.12.1 /opt/venv/lib/python3.12/site-packages pip
Cython 3.1.3 /opt/venv/lib/python3.12/site-packages pip
datasets 4.0.0 /opt/venv/lib/python3.12/site-packages pip
dbus-python 1.3.2 /usr/lib/python3/dist-packages
debugpy 1.8.16 /opt/venv/lib/python3.12/site-packages pip
decorator 5.2.1 /opt/venv/lib/python3.12/site-packages pip
decord 0.6.0 /opt/venv/lib/python3.12/site-packages pip
deepdiff 8.6.1 /opt/venv/lib/python3.12/site-packages pip
defusedxml 0.7.1 /opt/venv/lib/python3.12/site-packages pip
devscripts 2.23.7 /usr/lib/python3/dist-packages
diffusers 0.36.0.dev0 /opt/venv/lib/python3.12/site-packages pip
dill 0.3.8 /opt/venv/lib/python3.12/site-packages pip
distro 1.9.0 /usr/lib/python3/dist-packages debian
dm-tree 0.1.8 /opt/venv/lib/python3.12/site-packages pip
docker-pycreds 0.4.0 /opt/venv/lib/python3.12/site-packages pip
docstring_parser 0.17.0 /opt/venv/lib/python3.12/site-packages pip
docutils 0.22 /opt/venv/lib/python3.12/site-packages pip
draccus 0.11.5 /opt/venv/lib/python3.12/site-packages pip
einops 0.8.1 /opt/venv/lib/python3.12/site-packages pip
eval_type_backport 0.2.2 /opt/venv/lib/python3.12/site-packages pip
evdev 1.9.2 /opt/venv/lib/python3.12/site-packages pip
executing 2.2.1 /opt/venv/lib/python3.12/site-packages pip
Farama-Notifications 0.0.4 /opt/venv/lib/python3.12/site-packages pip
fastjsonschema 2.21.2 /opt/venv/lib/python3.12/site-packages pip
fastparquet 2024.11.0 /opt/venv/lib/python3.12/site-packages pip
feetech-servo-sdk 1.0.0 /opt/venv/lib/python3.12/site-packages pip
filelock 3.19.1 /opt/venv/lib/python3.12/site-packages pip
flash_attn 2.8.4 /opt/venv/lib/python3.12/site-packages pip
Flask 3.1.2 /opt/venv/lib/python3.12/site-packages pip
flatbuffers 25.2.10 /opt/venv/lib/python3.12/site-packages pip
fonttools 4.59.2 /opt/venv/lib/python3.12/site-packages pip
fqdn 1.5.1 /opt/venv/lib/python3.12/site-packages pip
frozenlist 1.7.0 /opt/venv/lib/python3.12/site-packages pip
fsspec 2025.3.0 /opt/venv/lib/python3.12/site-packages pip
gast 0.6.0 /opt/venv/lib/python3.12/site-packages pip
gitdb 4.0.12 /opt/venv/lib/python3.12/site-packages pip
GitPython 3.1.45 /opt/venv/lib/python3.12/site-packages pip
google-pasta 0.2.0 /opt/venv/lib/python3.12/site-packages pip
grpcio 1.74.0 /opt/venv/lib/python3.12/site-packages pip
gymnasium 1.0.0 /opt/venv/lib/python3.12/site-packages pip
h11 0.16.0 /opt/venv/lib/python3.12/site-packages pip
h5py 3.12.1 /opt/venv/lib/python3.12/site-packages pip
hf-xet 1.1.9 /opt/venv/lib/python3.12/site-packages pip
httpcore 1.0.9 /opt/venv/lib/python3.12/site-packages pip
httplib2 0.20.4 /usr/lib/python3/dist-packages
httpx 0.28.1 /opt/venv/lib/python3.12/site-packages pip
huggingface-hub 0.34.4 /opt/venv/lib/python3.12/site-packages pip
hydra-core 1.3.2 /opt/venv/lib/python3.12/site-packages pip
id 1.5.0 /opt/venv/lib/python3.12/site-packages pip
idna 3.10 /opt/venv/lib/python3.12/site-packages pip
imageio 2.34.2 /opt/venv/lib/python3.12/site-packages pip
importlib_metadata 8.7.0 /opt/venv/lib/python3.12/site-packages pip
iniconfig 2.1.0 /opt/venv/lib/python3.12/site-packages pip
inquirerpy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
iopath 0.1.9 /opt/venv/lib/python3.12/site-packages pip
ipykernel 6.30.1 /opt/venv/lib/python3.12/site-packages pip
ipython 9.5.0 /opt/venv/lib/python3.12/site-packages pip
ipython_pygments_lexers 1.1.1 /opt/venv/lib/python3.12/site-packages pip
ipywidgets 8.1.7 /opt/venv/lib/python3.12/site-packages pip
isoduration 20.11.0 /opt/venv/lib/python3.12/site-packages pip
itsdangerous 2.2.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.classes 3.4.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.context 6.0.1 /opt/venv/lib/python3.12/site-packages pip
jaraco.functools 4.3.0 /opt/venv/lib/python3.12/site-packages pip
jedi 0.19.2 /opt/venv/lib/python3.12/site-packages pip
jeepney 0.9.0 /opt/venv/lib/python3.12/site-packages pip
Jinja2 3.1.6 /opt/venv/lib/python3.12/site-packages pip
json5 0.12.1 /opt/venv/lib/python3.12/site-packages pip
jsonlines 4.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonpointer 3.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonschema 4.25.1 /opt/venv/lib/python3.12/site-packages pip
jsonschema-specifications 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
jupyter 1.1.1 /opt/venv/lib/python3.12/site-packages pip
jupyter_client 8.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter-console 6.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter_core 5.8.1 /opt/venv/lib/python3.12/site-packages pip
jupyter-events 0.12.0 /opt/venv/lib/python3.12/site-packages pip
jupyter-lsp 2.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server 2.17.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server_terminals 0.5.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab 4.4.7 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_myst 2.4.2 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_pygments 0.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_server 2.27.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_widgets 3.0.15 /opt/venv/lib/python3.12/site-packages pip
keras 3.11.3 /opt/venv/lib/python3.12/site-packages pip
keyring 25.6.0 /opt/venv/lib/python3.12/site-packages pip
kiwisolver 1.4.9 /opt/venv/lib/python3.12/site-packages pip
kornia 0.7.4 /opt/venv/lib/python3.12/site-packages pip
kornia_rs 0.1.9 /opt/venv/lib/python3.12/site-packages pip
lark 1.2.2 /opt/venv/lib/python3.12/site-packages pip
launchpadlib 1.11.0 /usr/lib/python3/dist-packages
lazr.restfulclient 0.14.6 /usr/lib/python3/dist-packages
lazr.uri 1.0.6 /usr/lib/python3/dist-packages
lazy_loader 0.4 /opt/venv/lib/python3.12/site-packages pip
lerobot 0.3.4 /opt/lerobot /opt/venv/lib/python3.12/site-packages pip
libclang 18.1.1 /opt/venv/lib/python3.12/site-packages pip
llvmlite 0.44.0 /opt/venv/lib/python3.12/site-packages pip
lockfile 0.12.2 /opt/venv/lib/python3.12/site-packages pip
Mako 1.3.10 /opt/venv/lib/python3.12/site-packages pip
Markdown 3.9 /opt/venv/lib/python3.12/site-packages pip
markdown-it-py 4.0.0 /opt/venv/lib/python3.12/site-packages pip
MarkupSafe 3.0.2 /opt/venv/lib/python3.12/site-packages pip
matplotlib 3.10.0 /opt/venv/lib/python3.12/site-packages pip
matplotlib-inline 0.1.7 /opt/venv/lib/python3.12/site-packages pip
mdurl 0.1.2 /opt/venv/lib/python3.12/site-packages pip
mergedeep 1.3.4 /opt/venv/lib/python3.12/site-packages pip
mistune 3.1.4 /opt/venv/lib/python3.12/site-packages pip
ml_dtypes 0.5.3 /opt/venv/lib/python3.12/site-packages pip
more-itertools 10.8.0 /opt/venv/lib/python3.12/site-packages pip
mpmath 1.3.0 /opt/venv/lib/python3.12/site-packages pip
msgpack 1.1.1 /opt/venv/lib/python3.12/site-packages pip
multidict 6.6.4 /opt/venv/lib/python3.12/site-packages pip
multiprocess 0.70.16 /opt/venv/lib/python3.12/site-packages pip
mypy_extensions 1.1.0 /opt/venv/lib/python3.12/site-packages pip
namex 0.1.0 /opt/venv/lib/python3.12/site-packages pip
nbclient 0.10.2 /opt/venv/lib/python3.12/site-packages pip
nbconvert 7.16.6 /opt/venv/lib/python3.12/site-packages pip
nbformat 5.10.4 /opt/venv/lib/python3.12/site-packages pip
nest-asyncio 1.6.0 /opt/venv/lib/python3.12/site-packages pip
networkx 3.5 /opt/venv/lib/python3.12/site-packages pip
nh3 0.3.0 /opt/venv/lib/python3.12/site-packages pip
ninja 1.13.0 /opt/venv/lib/python3.12/site-packages pip
notebook 7.4.5 /opt/venv/lib/python3.12/site-packages pip
notebook_shim 0.2.4 /opt/venv/lib/python3.12/site-packages pip
numba 0.61.2 /opt/venv/lib/python3.12/site-packages pip
numpy 2.3.3 /opt/venv/lib/python3.12/site-packages pip
numpydantic 1.6.7 /opt/venv/lib/python3.12/site-packages pip
nvtx 0.2.13 /opt/venv/lib/python3.12/site-packages pip
oauthlib 3.2.2 /usr/lib/python3/dist-packages
omegaconf 2.3.0 /opt/venv/lib/python3.12/site-packages pip
onnx 1.17.0 /opt/venv/lib/python3.12/site-packages pip
opencv-contrib-python 4.13.0 /opt/venv/lib/python3.12/site-packages pip
opencv-python 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opencv-python-headless 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opt_einsum 3.4.0 /opt/venv/lib/python3.12/site-packages pip
optimum 1.27.0 /opt/venv/lib/python3.12/site-packages pip
optree 0.17.0 /opt/venv/lib/python3.12/site-packages pip
orderly-set 5.5.0 /opt/venv/lib/python3.12/site-packages pip
packaging 25.0 /opt/venv/lib/python3.12/site-packages pip
pandas 2.2.3 /opt/venv/lib/python3.12/site-packages pip
pandocfilters 1.5.1 /opt/venv/lib/python3.12/site-packages pip
parso 0.8.5 /opt/venv/lib/python3.12/site-packages pip
peft 0.17.0 /opt/venv/lib/python3.12/site-packages pip
pettingzoo 1.25.0 /opt/venv/lib/python3.12/site-packages pip
pexpect 4.9.0 /opt/venv/lib/python3.12/site-packages pip
pfzy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
pid 3.0.4 /opt/venv/lib/python3.12/site-packages pip
pillow 11.3.0 /opt/venv/lib/python3.12/site-packages pip
pip 25.2 /opt/venv/lib/python3.12/site-packages pip
pkginfo 1.12.1.2 /opt/venv/lib/python3.12/site-packages pip
platformdirs 4.4.0 /opt/venv/lib/python3.12/site-packages pip
pluggy 1.6.0 /opt/venv/lib/python3.12/site-packages pip
portalocker 3.2.0 /opt/venv/lib/python3.12/site-packages pip
prometheus_client 0.22.1 /opt/venv/lib/python3.12/site-packages pip
prompt_toolkit 3.0.52 /opt/venv/lib/python3.12/site-packages pip
propcache 0.3.2 /opt/venv/lib/python3.12/site-packages pip
protobuf 6.32.0 /opt/venv/lib/python3.12/site-packages pip
psutil 7.0.0 /opt/venv/lib/python3.12/site-packages pip
ptyprocess 0.7.0 /opt/venv/lib/python3.12/site-packages pip
pure_eval 0.2.3 /opt/venv/lib/python3.12/site-packages pip
pyarrow 21.0.0 /opt/venv/lib/python3.12/site-packages pip
pycparser 2.23 /opt/venv/lib/python3.12/site-packages pip
pycuda 2025.1.1 /opt/venv/lib/python3.12/site-packages pip
pydantic 2.10.6 /opt/venv/lib/python3.12/site-packages pip
pydantic_core 2.27.2 /opt/venv/lib/python3.12/site-packages pip
Pygments 2.19.2 /opt/venv/lib/python3.12/site-packages pip
PyGObject 3.48.2 /usr/lib/python3/dist-packages
PyJWT 2.7.0 /usr/lib/python3/dist-packages debian
pynput 1.8.1 /opt/venv/lib/python3.12/site-packages pip
pyparsing 3.1.1 /usr/lib/python3/dist-packages debian
pyrsistent 0.20.0 /usr/lib/python3/dist-packages
pyserial 3.5 /opt/venv/lib/python3.12/site-packages pip
pytest 8.4.2 /opt/venv/lib/python3.12/site-packages pip
python-apt 2.7.7+ubuntu5 /usr/lib/python3/dist-packages
python-daemon 3.1.2 /opt/venv/lib/python3.12/site-packages pip
python-dateutil 2.9.0.post0 /opt/venv/lib/python3.12/site-packages pip
python-json-logger 3.3.0 /opt/venv/lib/python3.12/site-packages pip
python-xlib 0.33 /opt/venv/lib/python3.12/site-packages pip
pytools 2025.2.4 /opt/venv/lib/python3.12/site-packages pip
pytorch3d 0.7.8 /opt/venv/lib/python3.12/site-packages pip
pytz 2025.2 /opt/venv/lib/python3.12/site-packages pip
PyYAML 6.0.2 /opt/venv/lib/python3.12/site-packages pip
pyyaml-include 1.4.1 /opt/venv/lib/python3.12/site-packages pip
pyzmq 27.1.0 /opt/venv/lib/python3.12/site-packages pip
ray 2.40.0 /opt/venv/lib/python3.12/site-packages pip
readme_renderer 44.0 /opt/venv/lib/python3.12/site-packages pip
referencing 0.36.2 /opt/venv/lib/python3.12/site-packages pip
regex 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
requests 2.32.3 /opt/venv/lib/python3.12/site-packages pip
requests-toolbelt 1.0.0 /opt/venv/lib/python3.12/site-packages pip
rerun-sdk 0.24.1 /opt/venv/lib/python3.12/site-packages pip
rfc3339-validator 0.1.4 /opt/venv/lib/python3.12/site-packages pip
rfc3986 2.0.0 /opt/venv/lib/python3.12/site-packages pip
rfc3986-validator 0.1.1 /opt/venv/lib/python3.12/site-packages pip
rfc3987-syntax 1.1.0 /opt/venv/lib/python3.12/site-packages pip
rich 14.1.0 /opt/venv/lib/python3.12/site-packages pip
rpds-py 0.27.1 /opt/venv/lib/python3.12/site-packages pip
safetensors 0.6.2 /opt/venv/lib/python3.12/site-packages pip
scikit-build 0.18.1 /opt/venv/lib/python3.12/site-packages pip
scikit-image 0.25.2 /opt/venv/lib/python3.12/site-packages pip
scipy 1.16.1 /opt/venv/lib/python3.12/site-packages pip
SecretStorage 3.4.0 /opt/venv/lib/python3.12/site-packages pip
semantic-version 2.10.0 /opt/venv/lib/python3.12/site-packages pip
Send2Trash 1.8.3 /opt/venv/lib/python3.12/site-packages pip
sentencepiece 0.2.1 /opt/venv/lib/python3.12/site-packages pip
sentry-sdk 2.37.1 /opt/venv/lib/python3.12/site-packages pip
service 0.6.0 /opt/venv/lib/python3.12/site-packages pip
setproctitle 1.3.7 /opt/venv/lib/python3.12/site-packages pip
setuptools 80.9.0 /opt/venv/lib/python3.12/site-packages pip
setuptools-rust 1.12.0 /opt/venv/lib/python3.12/site-packages pip
shtab 1.7.2 /opt/venv/lib/python3.12/site-packages pip
siphash24 1.8 /opt/venv/lib/python3.12/site-packages pip
six 1.16.0 /usr/lib/python3/dist-packages
smmap 5.0.2 /opt/venv/lib/python3.12/site-packages pip
sniffio 1.3.1 /opt/venv/lib/python3.12/site-packages pip
soupsieve 2.8 /opt/venv/lib/python3.12/site-packages pip
stack-data 0.6.3 /opt/venv/lib/python3.12/site-packages pip
sympy 1.14.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard-data-server 0.7.2 /opt/venv/lib/python3.12/site-packages pip
tensorflow 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorrt 10.13.2.6 /opt/venv/lib/python3.12/site-packages pip
termcolor 3.1.0 /opt/venv/lib/python3.12/site-packages pip
terminado 0.18.1 /opt/venv/lib/python3.12/site-packages pip
tf_keras 2.20.1 /opt/venv/lib/python3.12/site-packages pip
tianshou 0.5.1 /opt/venv/lib/python3.12/site-packages pip
tifffile 2025.9.9 /opt/venv/lib/python3.12/site-packages pip
timm 1.0.14 /opt/venv/lib/python3.12/site-packages pip
tinycss2 1.4.0 /opt/venv/lib/python3.12/site-packages pip
tokenizers 0.21.4 /opt/venv/lib/python3.12/site-packages pip
toml 0.10.2 /opt/venv/lib/python3.12/site-packages pip
torch 2.9.0 /opt/venv/lib/python3.12/site-packages pip
torchvision 0.24.0 /opt/venv/lib/python3.12/site-packages pip
tornado 6.5.2 /opt/venv/lib/python3.12/site-packages pip
tqdm 4.67.1 /opt/venv/lib/python3.12/site-packages pip
traitlets 5.14.3 /opt/venv/lib/python3.12/site-packages pip
transformers 4.51.3 /opt/venv/lib/python3.12/site-packages pip
triton 3.5.0+gite3b8f77a /opt/venv/lib/python3.12/site-packages pip
twine 6.2.0 /opt/venv/lib/python3.12/site-packages pip
typeguard 4.4.2 /opt/venv/lib/python3.12/site-packages pip
types-python-dateutil 2.9.0.20250822 /opt/venv/lib/python3.12/site-packages pip
typing_extensions 4.12.2 /opt/venv/lib/python3.12/site-packages pip
typing-inspect 0.9.0 /opt/venv/lib/python3.12/site-packages pip
tyro 0.9.17 /opt/venv/lib/python3.12/site-packages pip
tzdata 2025.2 /opt/venv/lib/python3.12/site-packages pip
uri-template 1.3.0 /opt/venv/lib/python3.12/site-packages pip
urllib3 2.5.0 /opt/venv/lib/python3.12/site-packages pip
uv 0.8.16 /opt/venv/lib/python3.12/site-packages pip
wadllib 1.3.6 /usr/lib/python3/dist-packages
wandb 0.18.0 /opt/venv/lib/python3.12/site-packages pip
wcwidth 0.2.13 /opt/venv/lib/python3.12/site-packages pip
webcolors 24.11.1 /opt/venv/lib/python3.12/site-packages pip
webencodings 0.5.1 /opt/venv/lib/python3.12/site-packages pip
websocket-client 1.8.0 /opt/venv/lib/python3.12/site-packages pip
Werkzeug 3.1.3 /opt/venv/lib/python3.12/site-packages pip
wheel 0.45.1 /opt/venv/lib/python3.12/site-packages pip
widgetsnbextension 4.0.14 /opt/venv/lib/python3.12/site-packages pip
wrapt 1.17.3 /opt/venv/lib/python3.12/site-packages pip
xxhash 3.5.0 /opt/venv/lib/python3.12/site-packages pip
yarl 1.20.1 /opt/venv/lib/python3.12/site-packages pip
zipp 3.23.0 /opt/venv/lib/python3.12/site-packages pip
A imagem pode ser puxada diretamente do Docker Hub e inclui dependências comumente usadas, como PyTorch, TensorRT e FlashAttention:
docker pull johnnync/isaac-gr00t:r38.2.arm64-sbsa-cu130-24.04
Esta imagem Docker não oferece suporte à invocação de scripts LeRobot para inferência de modelo ACT. Se você precisar executar o conjunto completo de scripts LeRobot, use um ambiente fora desta imagem.
Para executar o Docker no Thor, consulte o seguinte comando. Substitua your_docker_img:tag pelo nome e tag da sua imagem Docker ou use o ID da imagem:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
your_docker_img:tag
Coleta de Dados Usando o SO-ARM
Para um tutorial detalhado sobre coleta de dados, consulte o seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#record-the-dataset
Este link contém um tutorial completo para o SO-ARM, cobrindo configuração, montagem, calibração, coleta de dados, treinamento e inferência.
A coleta de dados para o braço robótico lerobot pode ser realizada em um PC ou diretamente em um dispositivo Jetson.
- Método 1: Coletar dados usando Jetson
- Método 2: Coletar dados usando um PC com Ubuntu
Os procedimentos de coleta de dados são essencialmente os mesmos para ambos os métodos.
O Jetson pode não conseguir transmitir simultaneamente duas câmeras USB com os mesmos requisitos de largura de banda. Se você conectar duas câmeras USB, elas devem estar ligadas a chips de hub USB diferentes!
Para transmitir duas câmeras USB simultaneamente no Thor, após conectar uma câmera à porta USB-A, você também precisará usar um hub USB externo conectado via porta USB Type-C. Isso garante que a segunda câmera USB seja montada em um controlador de hub USB diferente dentro do Thor. Um exemplo de hub USB Type-C compatível é mostrado abaixo:

A base USB Type-C deve ser conectada a portas específicas no Thor para garantir que os periféricos funcionem corretamente, como mostrado abaixo:

Configuração do Ambiente Lerobot (opcional)
O processo de configuração do ambiente de desenvolvimento para o Lerobot pode ser encontrado na subseção do seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#install-lerobot
Configurar os motores
Os motores em cada junta do SO-ARM precisam ser configurados antes da montagem. As etapas de configuração podem ser encontradas na subseção do seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#configure-the-motors
Montagem
O processo de instalação dos braços mestre e seguidor do SO-ARM pode ser encontrado na subseção do seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#assembly
Calibração do SO-ARM
Depois que o SO-ARM estiver totalmente montado, será necessária a calibração. Consulte a subseção do seguinte link para o procedimento de calibração:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#calibrate
Ao calibrar os braços robóticos, NÃO conecte nenhuma câmera USB, pois isso pode causar conflitos de porta ou atribuições incorretas de portas.
Após executar o script de calibração, mova manualmente cada junta do braço robótico para garantir que ela atinja todo o seu intervalo de movimento! Caso contrário, poderá ocorrer uma incompatibilidade entre as poses dos braços líder e seguidor durante a teleoperação.
Adição de Câmera
Geralmente é recomendável instalar uma câmera no punho/garra do braço robótico e outra câmera na superfície da mesa, para garantir cobertura adequada da postura do braço. A abordagem específica de instalação depende do seu cenário de aplicação; o exemplo mostrado abaixo é apenas para referência.
Para mais detalhes, consulte a subseção do seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#add-cameras
Coleta de Dados
Após concluir a instalação das câmeras e a calibração do braço robótico, o procedimento de coleta do conjunto de dados pode ser encontrado na subseção do seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#record-the-dataset
Visualização dos Dados Coletados
Para visualizar os dados coletados no SO-ARM, consulte a subseção do seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#visualize-the-dataset
Treinamento de Política
Com base nos dados coletados, o procedimento para treinar uma Policy pode ser encontrado na subseção do seguinte link:
https://wiki.seeedstudio.com/pt-br/lerobot_so100m_new/#train-a-policy
Nas seções a seguir, apresentaremos uma plataforma de treinamento em nuvem e demonstraremos o uso básico. Você pode optar por concluir o treinamento de forma mais eficiente no servidor remoto.
Se você optar por treinar a política na nuvem, certifique-se de que seu conjunto de dados seja carregado antecipadamente para o servidor em nuvem ou baixado do Hugging Face Hub. No entanto, devido a possíveis problemas de rede ao baixar diretamente do Hugging Face Hub, é altamente recomendável enviar manualmente o conjunto de dados para o seu servidor em nuvem.
Usar NVIDIA Brev para treinar políticas
O NVIDIA Brev oferece acesso simplificado a instâncias de GPU NVIDIA em plataformas de nuvem populares, configuração automática de ambiente e opções de implantação flexíveis, permitindo que desenvolvedores comecem a experimentar instantaneamente.
URL de acesso à plataforma: https://login.brev.nvidia.com/signin
Você precisará registrar uma conta para usar a plataforma. Esta seção apresenta o uso básico da plataforma de treinamento.
Habilitando a Plataforma de Treinamento em Nuvem
Instruções Passo a Passo
- Criar uma Instância de Servidor em Nuvem - passo 1
- Criar uma Instância de Servidor em Nuvem - passo 2
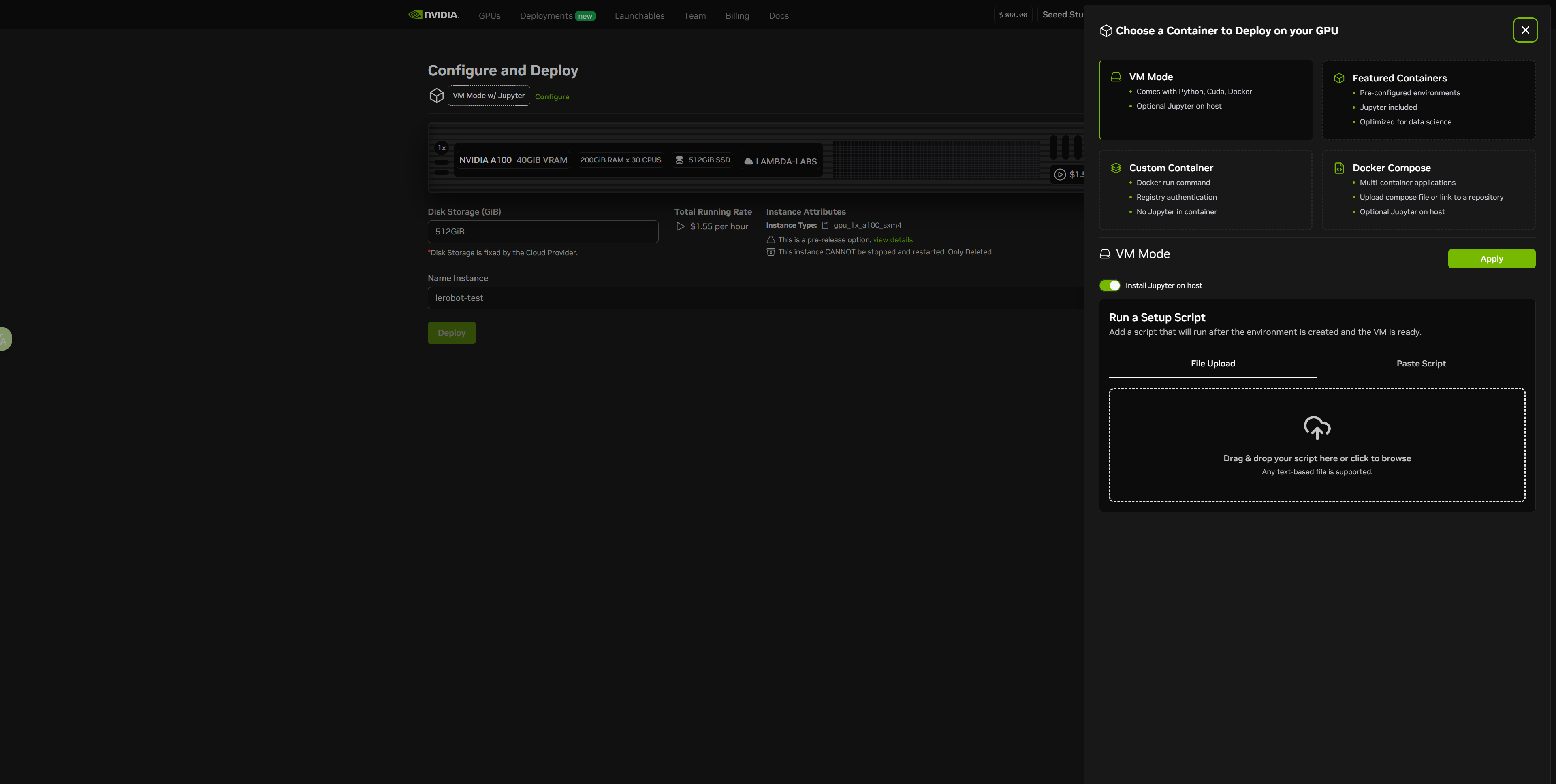
- Criar uma Instância de Servidor em Nuvem - passo 3
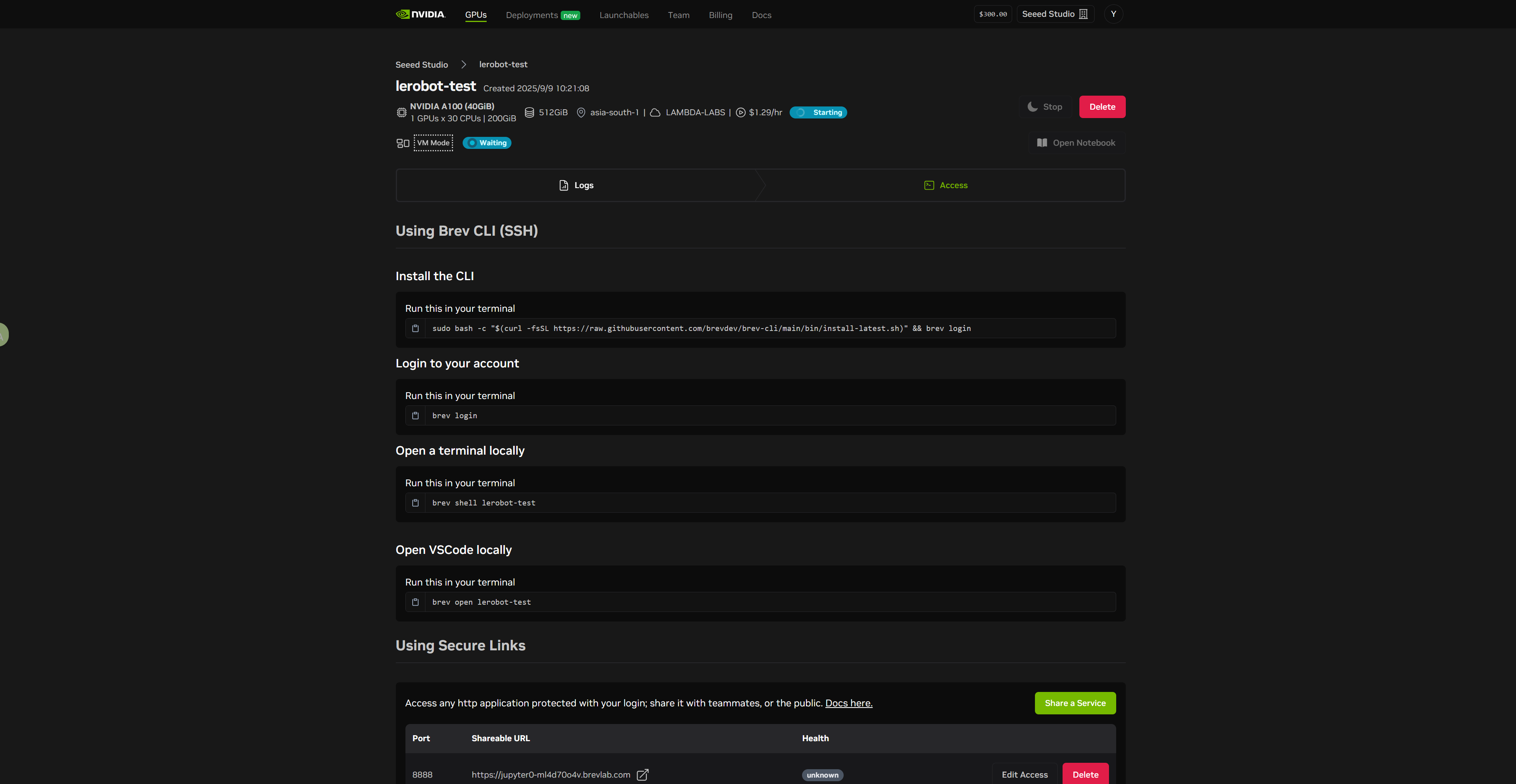
Iniciar o Jupyter Notebook baseado na Web:

Treinando o Modelo e Exportando do Servidor
Os desenvolvedores podem treinar modelos diretamente no terminal do notebook. Abaixo está um exemplo para treinar um GR00T N1.5 e exportá-lo do servidor posteriormente.
Instalar o Conda no servidor:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
source ~/miniconda3/bin/activate
conda init --all
Clonar o repositório Isaac-GR00T:
git clone https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
Criar o ambiente gr00t:
conda create -n gr00t python=3.10
conda activate gr00t
pip install --upgrade setuptools
pip install -e .[base]
pip install --no-build-isolation flash-attn==2.7.1.post4
Se você treinar ou ajustar o GR00T em uma plataforma de nuvem, deverá usar uma GPU com arquitetura Ampere ou mais recente (por exemplo, RTX A6000 ou GeForce RTX 4090). V100 (Volta) não é compatível para treinamento ou ajuste fino do GR00T.
Para mais detalhes sobre ajuste fino do modelo, consulte: https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning#:~:text=1.2%20Configure%20Modality%20File
Ajuste fino do modelo GR00T N1.5:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
As configurações padrão de ajuste fino exigem cerca de 25G de VRAM. Se você não tiver tanta VRAM, tente adicionar a flag --no-tune_diffusion_model ao script gr00t_finetune.py.
Se você quiser treinar ou ajustar o Gr00t em um servidor, pode consultar este link.
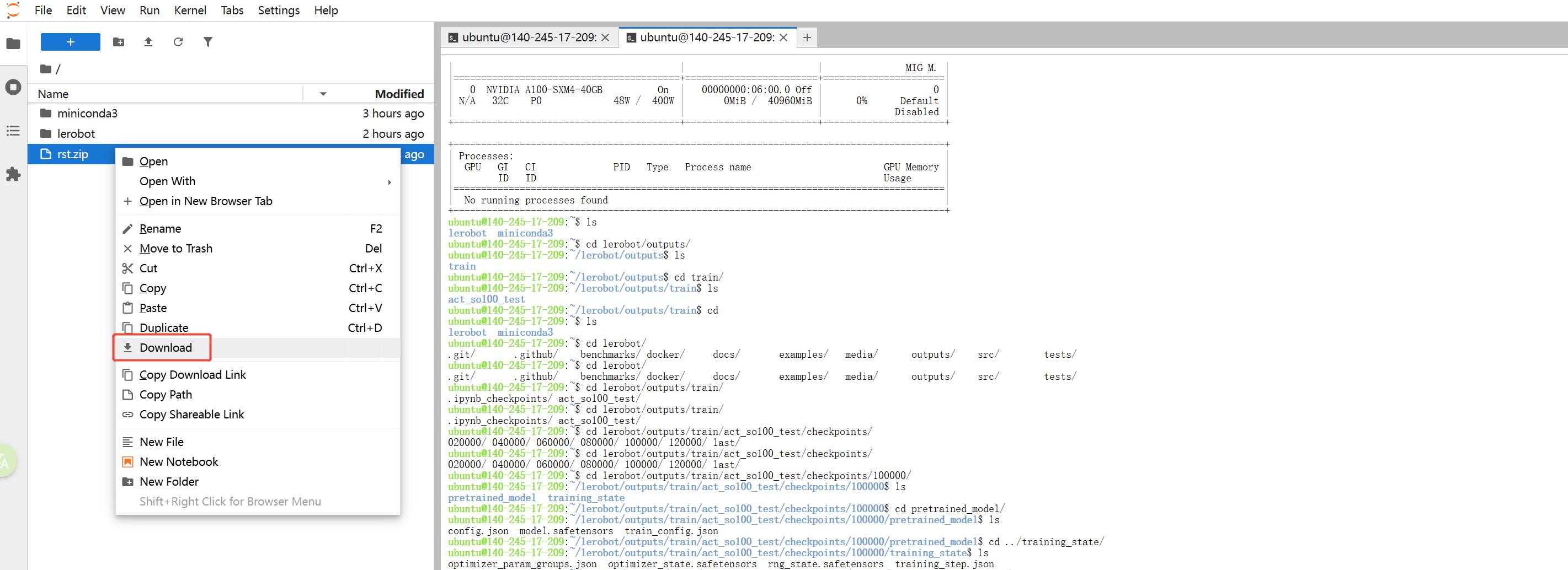
Após a conclusão do treinamento, talvez você queira baixar o modelo para sua máquina local. Mas a barra lateral do Jupyter Notebook não oferece suporte à navegação direta para pastas de treinamento de modelos.
A solução é: primeiro compacte a pasta de destino em um arquivo .zip ou .tar.gz e, em seguida, baixe o arquivo compactado através da interface do notebook. Consulte a figura abaixo para um exemplo.
Inferência Isaac GR00T N1.5 no Thor
O Jetson AGX Thor, como uma poderosa plataforma de computação e implantação de borda, fornece recursos suficientes para suportar inferência de modelos em larga escala. Nesta seção, com base no conteúdo apresentado anteriormente, demonstramos como executar a inferência para o GR00T N1.5 no Thor.
GR00T N1.5 é um sistema base de código aberto lançado pela NVIDIA Research na área de aprendizado de robôs. Seu objetivo é fornecer uma estrutura unificada para treinamento e inferência em IA incorporada, com foco especial em aprendizado por imitação e aprendizado de políticas impulsionados por modelos em larga escala.
Preparação
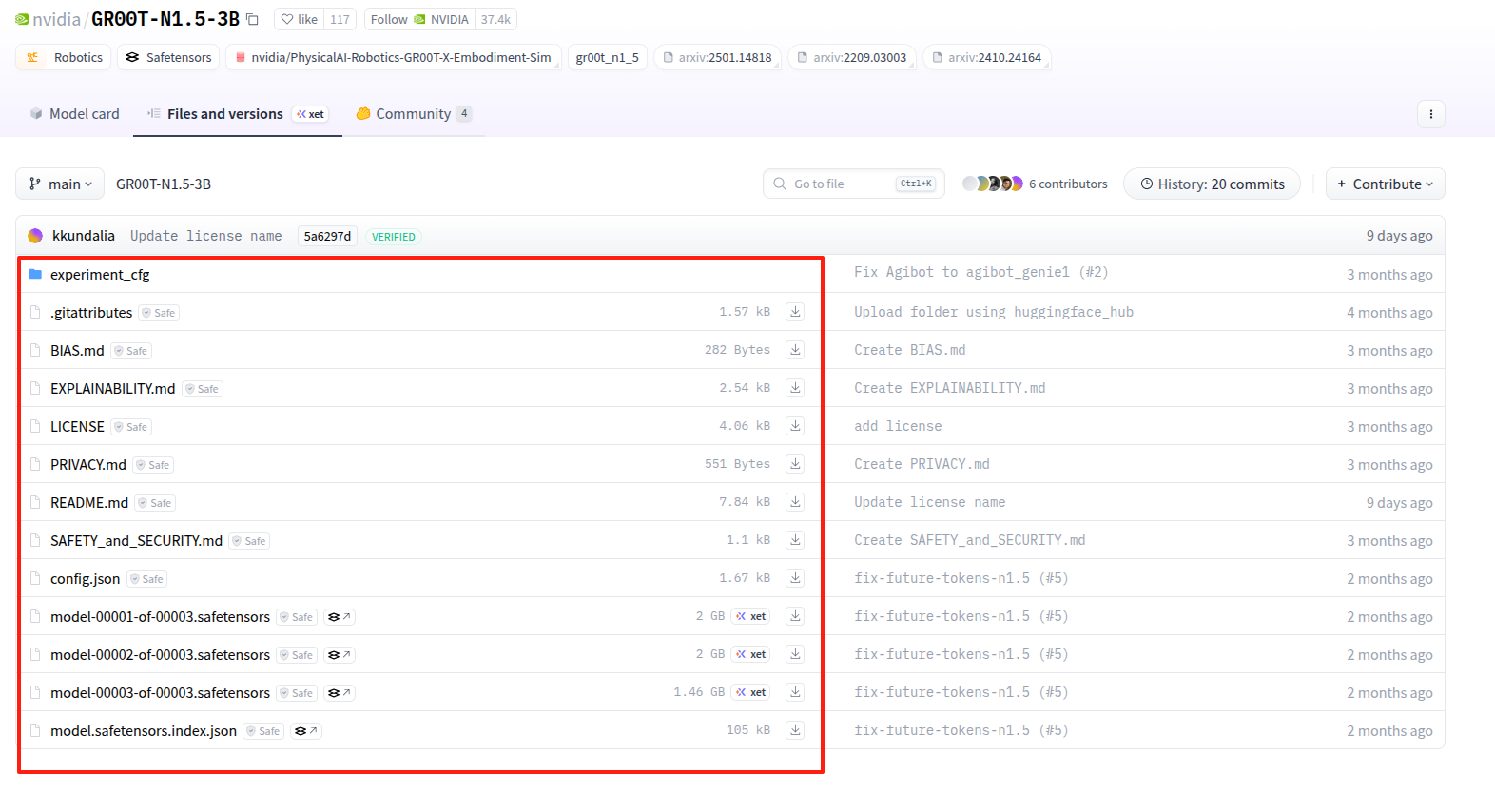
Os modelos pré-treinados do GR00T N1.5 estão disponíveis via Hugging Faces. Você pode baixá-los a partir do seguinte link:
https://huggingface.co/nvidia/GR00T-N1.5-3B/tree/main
Todas as dependências necessárias para a inferência do GR00T já foram pré-configuradas em uma imagem Docker dedicada.
Use o seguinte comando para iniciar o contêiner, substituindo <image_name>:<tag> pelo que você estiver usando:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
<image_name>:<tag>
Faça o git clone do código-fonte do Gr00t e instale-o:
git clone https://github.com/NVIDIA/Isaac-GR00T.git
cd Isaac-GR00T
pip install --upgrade setuptools
pip install -e .[thor]
Gr00t é totalmente compatível com os conjuntos de dados coletados usando o framework lerobot. Consulte a seção anterior "Data Collection" para preparar seu conjunto de dados para o fine-tuning do modelo Gr00t.
Fine-Tuning do Modelo (opcional)
Se você já fez o fine-tuning do GR00T N1.5 no NVIDIA Brev, pode pular esta etapa no Thor.
O processo de fine-tuning pode ser executado tanto na plataforma de treinamento em nuvem fornecida quanto diretamente dentro do contêiner Docker no Thor.
Se você não baixou nenhum modelo GR00T pré-treinado e não pretende usar uma versão personalizada, pode usar o seguinte comando para fazer o fine-tuning com base nos pesos do Hugging Face:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
Esse script irá automaticamente baixar o modelo GR00T pré-treinado do Hugging Face e iniciar o processo de fine-tuning.
Se desejar usar um modelo GR00T pré-treinado armazenado localmente, modifique o comando da seguinte forma:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av \
--base-model-path ./pretrained/GR00T-N1.5-3
--dataset-path é o caminho de arquivo dos dados coletados do SO-ARM.
As configurações padrão de fine-tuning exigem cerca de 25G de VRAM. Se você não tiver essa quantidade de VRAM, tente adicionar a flag --no-tune_diffusion_model ao script gr00t_finetune.py.
Executando Inferência com GR00T N1.5
Para obter o desempenho ideal, é recomendável reproduzir o mais fielmente possível o ambiente real utilizado durante a coleta de dados ao implantar modelos GR00T com fine-tuning. Isso porque as capacidades de generalização do modelo são limitadas.

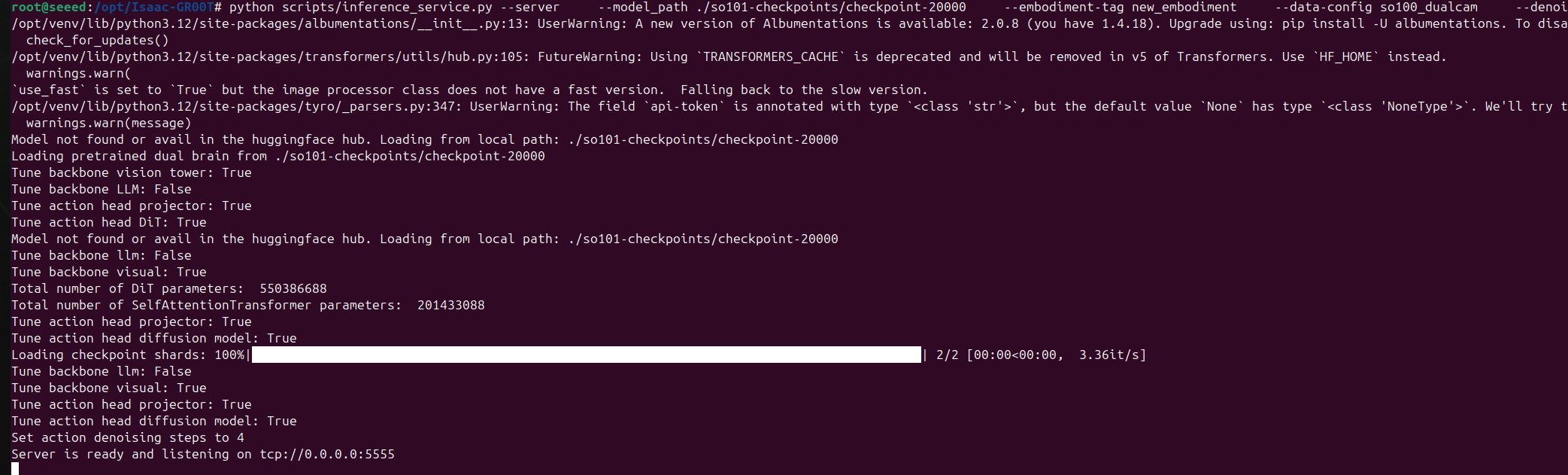
Dentro do contêiner Docker, abra um terminal e inicie o serviço de inferência do GR00T:
python scripts/inference_service.py --server \
--model_path ./so101-checkpoints \
--embodiment-tag new_embodiment \
--data-config so100_dualcam \
--denoising-steps 4
Após a inicialização bem-sucedida, o terminal deve exibir logs semelhantes a:
Abra outro terminal e use o seguinte comando para entrar no mesmo contêiner a partir de outro shell:
sudo docker exec -it <container id> /bin/bahs
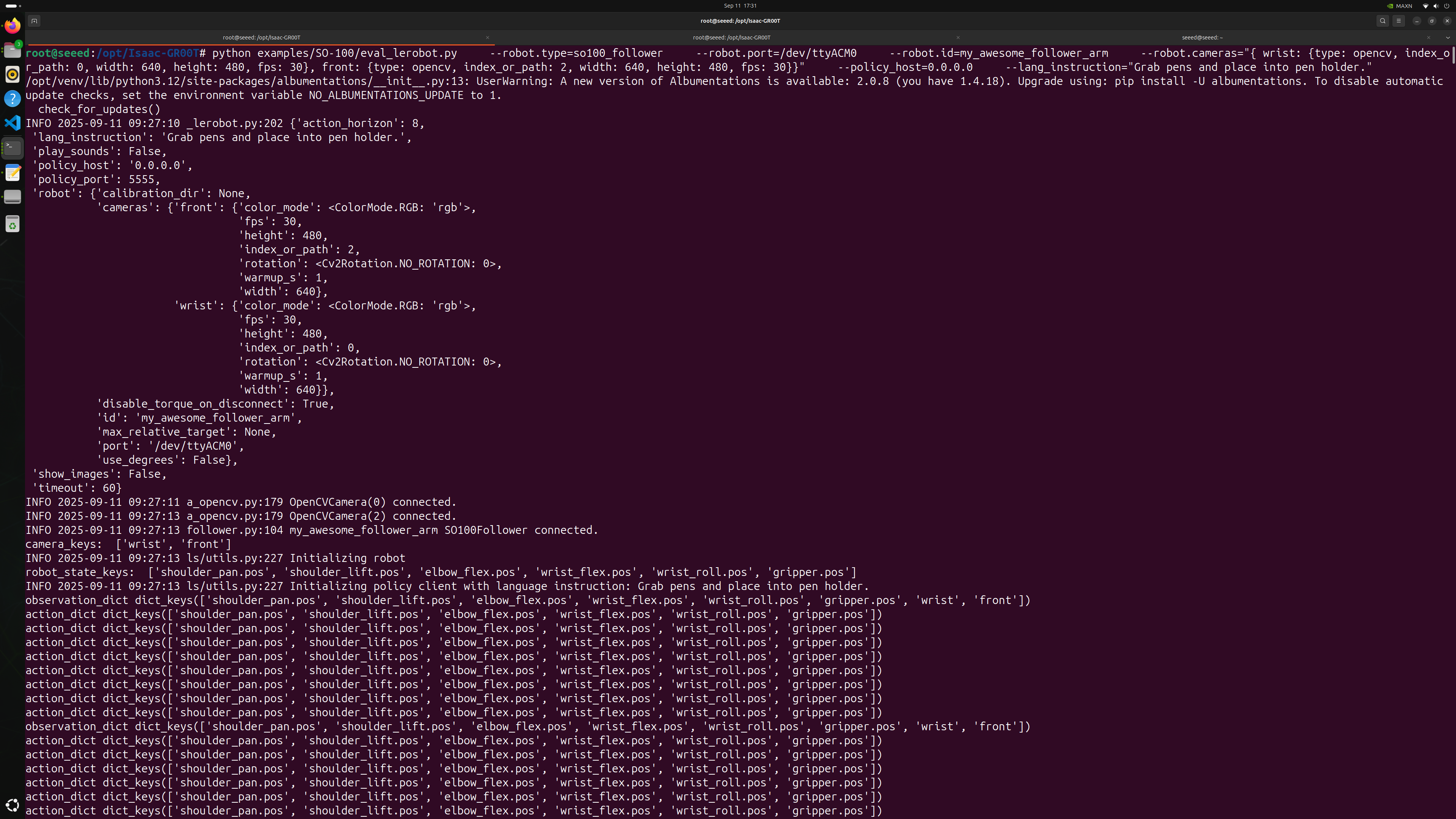
Em seguida, nesse segundo shell, inicie o cliente de inferência:
python examples/SO-100/eval_lerobot.py \
--robot.type=so100_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ wrist: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30}, front: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30}}" \
--policy_host=0.0.0.0 \
--lang_instruction="Grab pens and place into pen holder."
Substitua index_or_path pelo número de índice da sua câmera; você pode encontrá-lo executando ls /dev/video*.
Quando o processo do cliente for iniciado com sucesso, a seguinte saída deverá aparecer:
Durante a primeira execução do processo do cliente, você deve calibrar os servos do braço. O processo de calibração é o mesmo descrito anteriormente.
Certifique-se de que cada junta se mova por toda a sua faixa de movimento para garantir o comportamento adequado de teleoperação e inferência.
Depois que tudo estiver configurado, o GR00T N1.5 poderá ser implantado com sucesso no Jetson AGX Thor. O sistema e o ambiente de hardware agora estão verificados para suportar a inferência completa:
FAQ
P1: A ferramenta Brev CLI não funciona na plataforma de treinamento em nuvem?
Isso geralmente é causado por problemas de rede.
Você pode instalar e fazer login no Brev CLI no seu host Ubuntu local e, em seguida, tentar se conectar à sua instância em nuvem usando SSH a partir do terminal local.
P2: Como faço para enviar dados para a plataforma de treinamento?
Use o seguinte comando: scp <local-file-path> <brev-instance-name>:<remote-file-path>, por exemplo scp -r ./record_2_cameras/ gr00t-trainer:/home/ubuntu/Datasets
P3: A tela do Thor fica preta assim que a instalação começa
Se você usar um pendrive de instalação Jetson em um Jetson AGX Thor Developer Kit que já foi usado ou configurado anteriormente, é necessário habilitar o SoC Display Hand-Off no UEFI setup menu.
Na verdade, o processo de flashing continua em segundo plano durante esse período; depois de um tempo, a área de trabalho do Ubuntu aparecerá.
P4: Não tenho saída de vídeo no monitor (conectado por meio de um KVM)
Sabe-se que alguns switches/dispositivos KVM não lidam bem com a saída de vídeo do Jetson AGX Thor Developer Kit. Conecte o monitor diretamente ao Jetson AGX Thor Developer Kit.
P5: Depois de fazer o flashing do Thor, o HDMI às vezes não mostra sinal em inicializações posteriores
Uma solução alternativa que tem se mostrado eficaz é mudar para o conector DisplayPort (DP) para saída de vídeo.
P6: Nenhuma entrada de teclado é detectada durante o flashing da imagem do Thor
Recomendamos usar um teclado com fio durante o flashing. Teclados sem fio podem ter compatibilidade limitada durante o processo de flashing do Thor.
P7: O fine-tuning em nuvem do GR00T informa “GPU not supported”
Não utilize GPUs mais antigas que a Ampere architecture para o fine-tuning em nuvem do GR00T (por exemplo, RTX A6000 ou GeForce RTX 4090). A V100 (Volta) não é suportada para treinamento ou fine-tuning do GR00T.
P8: O nome do dispositivo serial da placa controladora do braço robótico não aparece em /dev
O sistema Thor padrão não inclui drivers CH34x. Se eles estiverem ausentes, instale-os a partir de:
https://github.com/juliagoda/CH341SER
P9: A porta Type-C do Thor não reconhece um hub externo
Para usar um hub externo via Type-C do Thor, conecte-o à porta Type-C mais próxima do conector QSFP28. (Ambas as portas Type-C fornecem energia, mas apenas a especificada oferece suporte confiável ao hub.)
P10: Ao fazer o flashing com uma placa de captura, o sistema depois diz que a senha do usuário está incorreta
Ao usar um desktop com placa de captura durante o flashing, pode ocorrer um bug de entrada de teclado (a entrada não corresponde ao que é digitado). Verifique cuidadosamente a senha do usuário ao defini-la.
P11: Onde fica a porta de debug do Thor?
A porta de debug Type-C do Thor fica escondida sob a tampa magnética. Vários nós de dispositivo serial podem ser criados; use aquele com o menor índice para fazer login no Thor via serial.
P12: Não é possível executar scripts LeRobot para inferir ACT na imagem do GR00T
Não recomendamos chamar APIs do LeRobot para inferência de ACT em um ambiente Python 3.12. Scripts de Calibration e find port não apresentam problema. Observe que o Ubuntu 24 usa Python 3.12 como padrão localmente.
P13: Como verificar a utilização de SM da GPU no Thor?
Execute:
nvidia-smi dmon -s puc
Verifique a coluna sm na saída.
P14: Não é possível ler dados da porta serial do driver do braço robótico
Não conecte a câmera antes da placa driver SO-ARM; fazer isso pode causar um mapeamento incorreto de dispositivos seriais. Além disso, certifique-se de que as permissões da porta serial tenham sido concedidas.
Referências
- https://developer.nvidia.com/embedded/jetpack
- https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para lhe oferecer diferentes tipos de suporte e garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.