Desenvolvimento avançado do Gimbal com C
Existem três abordagens para desenvolver para o reCamera Gimbal:
- Desenvolvimento de lógica de aplicação usando nós do Node-RED
- Scripts Bash usando ferramentas can-utils por meio de comandos de terminal
- Programação em C que exige configuração de ambiente de cross-compilação e compilação de binário
Este documento fornecerá um guia abrangente sobre como desenvolver para o reCamera Gimbal usando programação em C.
Para desenvolvimento baseado em Node-RED, consulte:
Node-RED Development Documentation
Antes de desenvolver, você precisa instalar o ambiente de cross-compilação em seu ambiente de desenvolvimento.
Linux:
sudo apt-get update
sudo apt-get install can-utils
mkdir recamera && cd recamera
wget https://github.com/Seeed-Studio/reCamera-OS/releases/download/0.2.0/reCameraOS_sdk_v0.2.0.tar.gz
tar -xzvf reCameraOS_sdk_v0.2.0.tar.gz
git clone https://github.com/sophgo/host-tools.git
git clone https://github.com/Seeed-Studio/sscma-example-sg200x.git
export SG200X_SDK_PATH=$HOME/recamera/sg2002_recamera_emmc/
export PATH=$HOME/recamera/host-tools/gcc/riscv64-linux-musl-x86_64/bin:$PATH
Baixar o programa de exemplo
sudo apt-get install unzip
wget https://files.seeedstudio.com/wiki/reCamera/Gimbal/CAN.zip
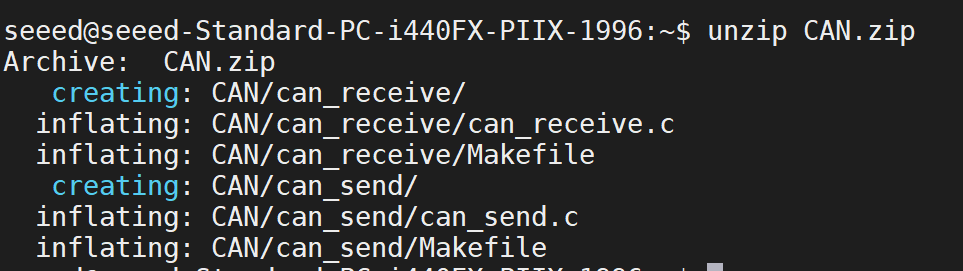
unzip CAN.zip
A estrutura de diretórios é mostrada a seguir:
Você precisa modificar o Makefile para substituir a variável CC pela sua própria ferramenta de cross-compilação.
CC = $HOME/recamera/host-tools/gcc/riscv64-linux-musl-x86_64/bin/riscv64-unknown-linux-musl-gcc
Compilar o programa
cd CAN/can_send
mkdir build && cd build
cmake ../
make
Envie o binário compilado para a reCamera
scp can_send recamera@ip_address:/home/recamera
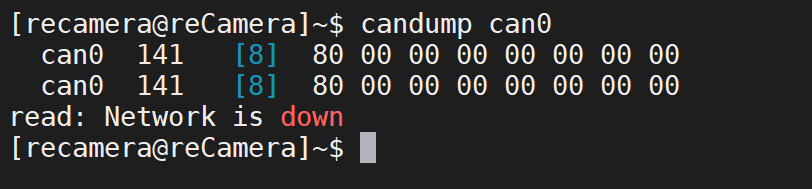
Use candump can0 para visualizar os dados do barramento CAN
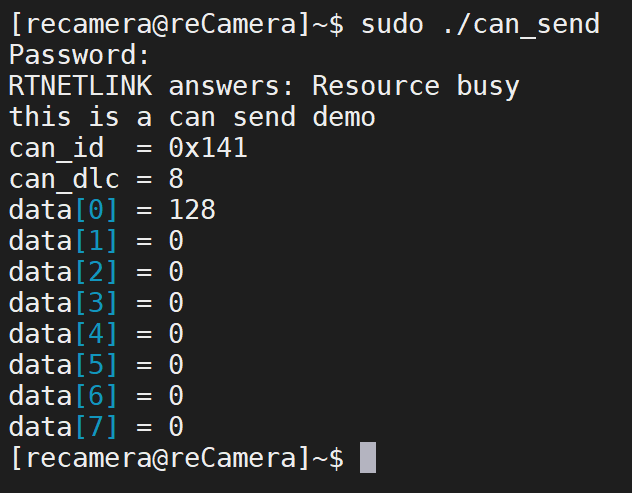
Use sudo ./can_send para testar o script
Análise do programa
Esses comandos são usados para definir a taxa do barramento CAN e o status da interface, o que só precisa ser inicializado uma vez na aplicação.
"sudo ip link set can0 type can bitrate 100000"
"sudo ifconfig can0 up"
Conforme mostrado, no arquivo can_send.c, os comandos acima são chamados usando a função system.
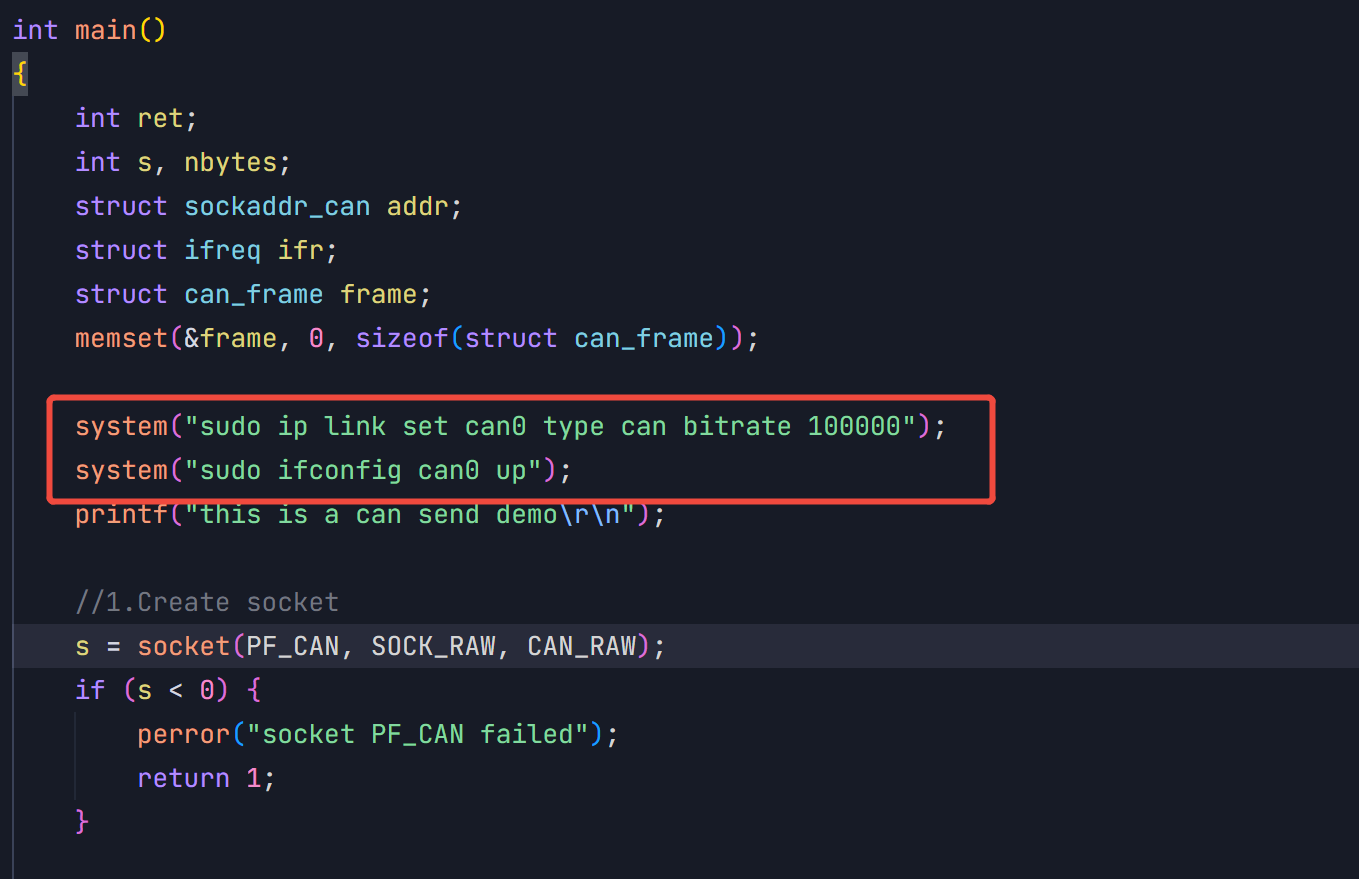
Você precisa definir uma estrutura de quadro CAN para armazenar o ID do quadro CAN, o comprimento dos dados e os dados. E usar a função memset para limpar a estrutura do quadro CAN para zero.
struct can_frame frame;
memset(&frame, 0, sizeof(struct can_frame));
Você pode definir can_id e can_dlc para configurar o ID e o comprimento dos dados do quadro CAN.
Este é o formato padrão de dados de quadro CAN.
Usando nbytes = write(s, &frame, sizeof(frame)); para enviar o quadro CAN para o barramento CAN, ele retorna o número de bytes enviados. Você pode comparar o valor retornado com o número esperado de bytes para determinar se o quadro CAN foi enviado com sucesso.
//5.Set send data
frame.can_id = 0x141;
frame.can_dlc = 8;
frame.data[0] = 0x80;
frame.data[1] = 0x00;
frame.data[2] = 0x00;
frame.data[3] = 0x00;
frame.data[4] = 0x00;
frame.data[5] = 0x00;;
frame.data[6] = 0x00;
frame.data[7] = 0x00
Você pode consultar mais programas em C em nosso repositório Github.
Observe que os programas relacionados ao Gimbal são desenvolvidos com base em componentes do Node-RED. Nós só manteremos programas em Node-RED daqui para frente, portanto você pode referenciar e desenvolver diretamente em Node-RED.
Como os programas em C não são mantidos, eles podem se tornar inválidos à medida que o firmware do motor é atualizado. Use nosso manual mais recente do motor para encapsular os comandos corretos para desenvolvimento.
Recursos
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para lhe fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.