Detecção de armas com Frigate NVR no R2000
Introdução
Frigate NVR é um gravador de vídeo em rede de código aberto projetado para análise de vídeo em tempo real com foco em IA na borda. Implantado em um reComputer AI box com Hailo, o sistema ingere localmente vários streams de câmera, executa um modelo quantitativo de detecção de objetos e emite eventos MQTT em milissegundos, eliminando a latência da nuvem e os custos de largura de banda.
Para esta implantação, expandimos a biblioteca de modelos existente do Frigate e adicionamos um modelo personalizado yolov11s especificamente ajustado para reconhecimento de pistolas e rifles. Quando uma arma é detectada, o mecanismo de regras do Frigate dispara imediatamente um alerta, dando às equipes de segurança segundos preciosos para bloquear a área e coordenar uma resposta antes que a ameaça aumente.
Pré-requisitos
Requisitos de hardware
| reComputer AI Industrial R2000 | reComputer AI R2000 |
|---|---|
 |  |
Configurando o Frigate
Modificando as configurações de PCIe
Abrindo o config.txt:
sudo nano /boot/firmware/config.txt
Adicione o seguinte ao config.txt:
dtparam=pciex1_gen=3
dtoverlay=pciex1-compat-pi5,no-mip
Em seguida, salve o arquivo usando Ctrl+x e reinicie o AI box.
Instalar Docker e hailo-all
sudo apt update
sudo apt install hailo-all
curl -fsSL https://get.docker.com -o get-docker.sh
sudo sh get-docker.sh
sudo usermod -aG docker $USER
sudo apt install docker-compose-plugin
Criando um arquivo yml
Crie o arquivo frigate.yml para que o Docker Compose possa executar o Frigate.
cd ~
sudo nano frigate.yml
Aqui está um exemplo de frigate.yml:
services:
frigate-hailo:
container_name: frigate-hailo
privileged: true
restart: unless-stopped
image: ghcr.io/blakeblackshear/frigate:0.16.0-beta3-standard-arm64
shm_size: "512mb" # calculate on your own
stop_grace_period: 30s # allow enough time to shut down the various services
devices:
- /dev/hailo0:/dev/hailo0
- /dev/video19:/dev/video19 # USB camera (physical device)
- /dev/video20:/dev/video20 # USB camera backup device
volumes:
- /etc/localtime:/etc/localtime:ro
- ./config/:/config
- ./data/db/:/data/db
- ./data/storage:/media/frigate
- ./media:/media/frigate # Mapping local media files to the container
- type: tmpfs
target: /tmp/cache
tmpfs:
size: 1g
ports:
- 5000:5000
environment:
- FRIGATE_RTSP_PASSWORD=password
- LIBVA_DRIVER_NAME=i965
group_add:
- "44" # video group
Baixe o vídeo de caso:
mkdir media && cd media
wget -c \
"https://files.seeedstudio.com/wiki/reComputer/Application/Firearm_Detection_With_Frigate_NVR_on_R2130/model_cache/yolov11s.hef"
Baixe o modelo YOLO e crie o config.yml:
cd .. && mkdir config && cd config && mkdir model_cache
cd model_cache && wget https://hailo-model-zoo.s3.eu-west-2.amazonaws.com/ModelZoo/Compiled/v2.14.0/hailo8/yolov8n.hef
cd .. && nano config.yml
A seguir está um exemplo de config.yml:
database:
path: /data/db/frigate.db
go2rtc:
streams:
# USB camera streaming
usb_camera:
- "ffmpeg:/dev/video0#input=-f v4l2 -input_format mjpeg -video_size 640x480 -framerate 15"
# RTSP stream configuration
hikvision_main:
- "rtsp://admin:[email protected]:554/h264/ch1/main/av_stream"
# Video file streaming - close.mp4
video_files_close:
- "ffmpeg:/media/frigate/close.mp4"
# Video file streaming - close2.mp4
video_files_close2:
- "ffmpeg:/media/frigate/close2.mp4"
# Video file streaming - y4.mp4
video_files_y4:
- "ffmpeg:/media/frigate/y4.mp4"
# Video file streaming - y5.mp4
video_files_y5:
- "ffmpeg:/media/frigate/y5.mp4"
cameras:
# USB camera
usb_camera:
ffmpeg:
inputs:
- path: /dev/video0
input_args: -f v4l2 -input_format mjpeg -video_size 640x480 -framerate 15
roles:
- record
- detect
detect:
width: 640
height: 480
fps: 3
record:
enabled: true
retain:
days: 7
mode: motion
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 100000
threshold: 0.25
# Video file camera - close.mp4
video_files_close:
ffmpeg:
inputs:
- path: /media/frigate/close.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 2
record:
enabled: false
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 20
max_area: 500000
threshold: 0.25
# Video file camera - close2.mp4
video_files_close2:
ffmpeg:
inputs:
- path: /media/frigate/close2.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 2
record:
enabled: false
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 20
max_area: 500000
threshold: 0.25
# Video file camera - y4.mp4
video_files_y4:
ffmpeg:
inputs:
- path: /media/frigate/y4.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 3
record:
enabled: true
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 500000
threshold: 0.3
# Video file camera - y5.mp4
video_files_y5:
ffmpeg:
inputs:
- path: /media/frigate/y5.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 3
record:
enabled: true
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 500000
threshold: 0.25
# RTSP IP camera - hikvision
hikvision_main:
ffmpeg:
inputs:
- path: rtsp://admin:[email protected]:554/h264/ch1/main/av_stream
input_args: -rtsp_transport tcp -avoid_negative_ts make_zero
roles:
- detect
- record
detect:
width: 1920
height: 1080
fps: 3
record:
enabled: true
retain:
days: 7
mode: motion
objects:
track:
- gun
filters:
gun:
min_area: 20
max_area: 500000
threshold: 0.25
mqtt:
enabled: false
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 500000
threshold: 0.25
detectors:
hailo8l:
type: hailo8l
device: PCIe
model:
width: 640
height: 640
input_tensor: nhwc
input_pixel_format: rgb
input_dtype: int
model_type: yolo-generic
path: /config/model_cache/yolov11s.hef
labelmap:
0: person
1: gun
detect:
enabled: true
snapshots:
enabled: true
clean_copy: true
timestamp: true
bounding_box: true
crop: false
retain:
default: 14
quality: 95
record:
enabled: true
retain:
days: 30
mode: all
ui:
timezone: Asia/Shanghai
auth:
enabled: false
live:
height: 720
quality: 8
birdseye:
enabled: true
width: 1280
height: 720
quality: 8
mode: objects
version: 0.16-0
semantic_search:
enabled: false
reindex: false
model_size: small
face_recognition:
enabled: false
lpr:
enabled: false
Executar o projeto
Faça o pull e execute o projeto:
cd ~
sudo docker pull mjqx2023/frigate_seeed
docker compose -f frigate.yml up -d
Em seguida, abra localhost:5000 no navegador da web do AI box:
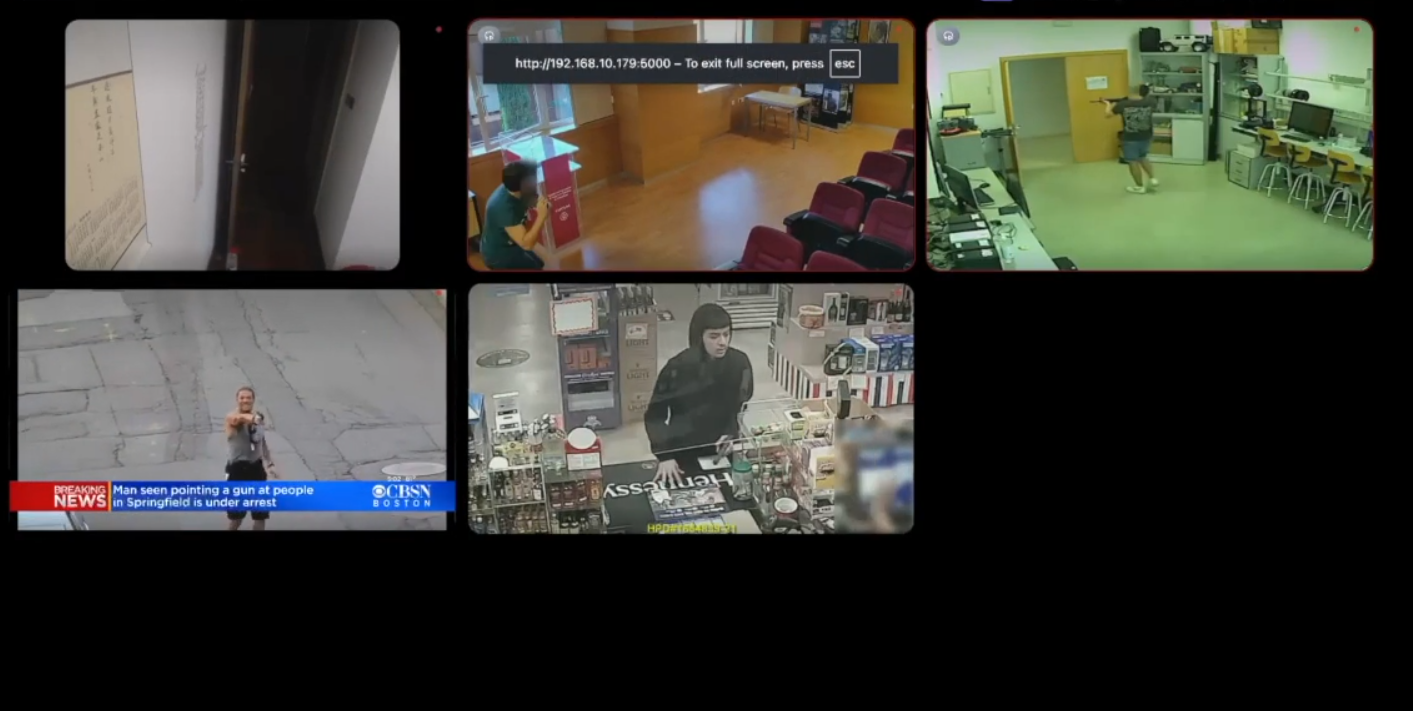
Selecione um dos vídeos para começar a depuração, selecione a caixa de exibição e os resultados serão exibidos automaticamente:

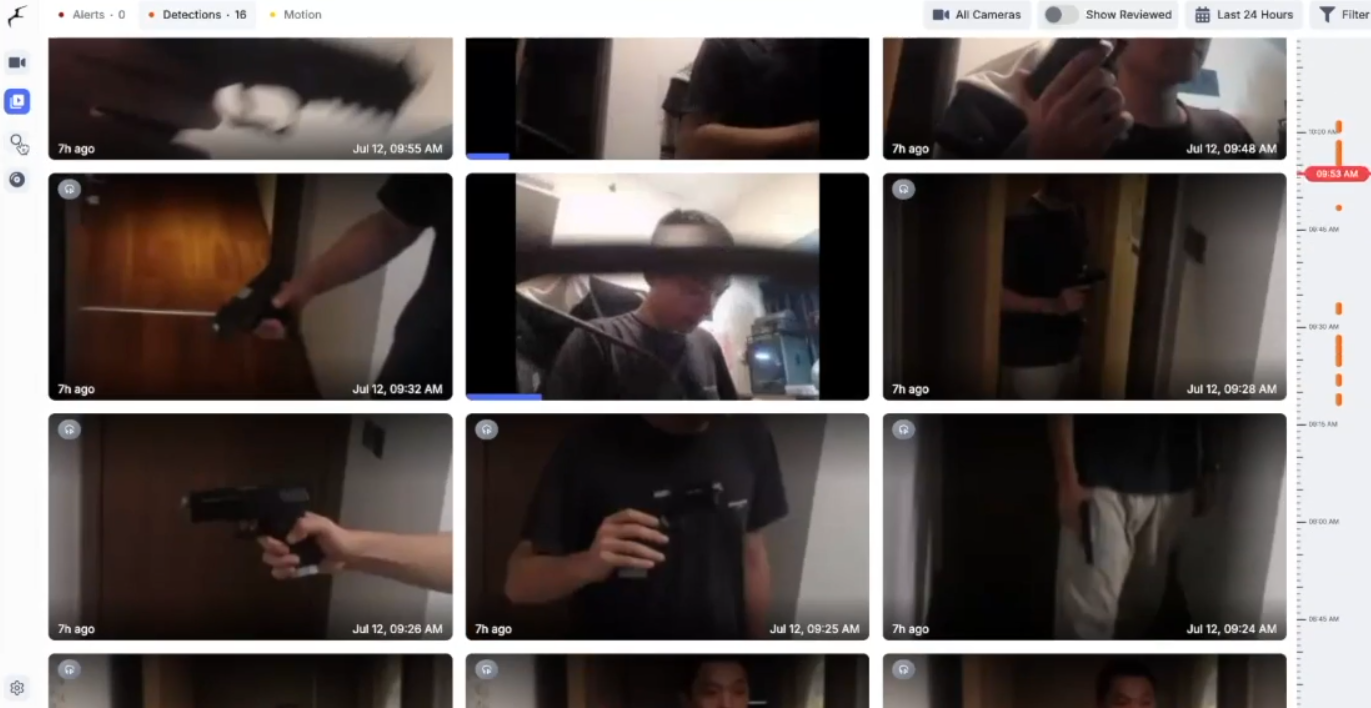
Alterne as abas para visualizar os resultados de testes anteriores:
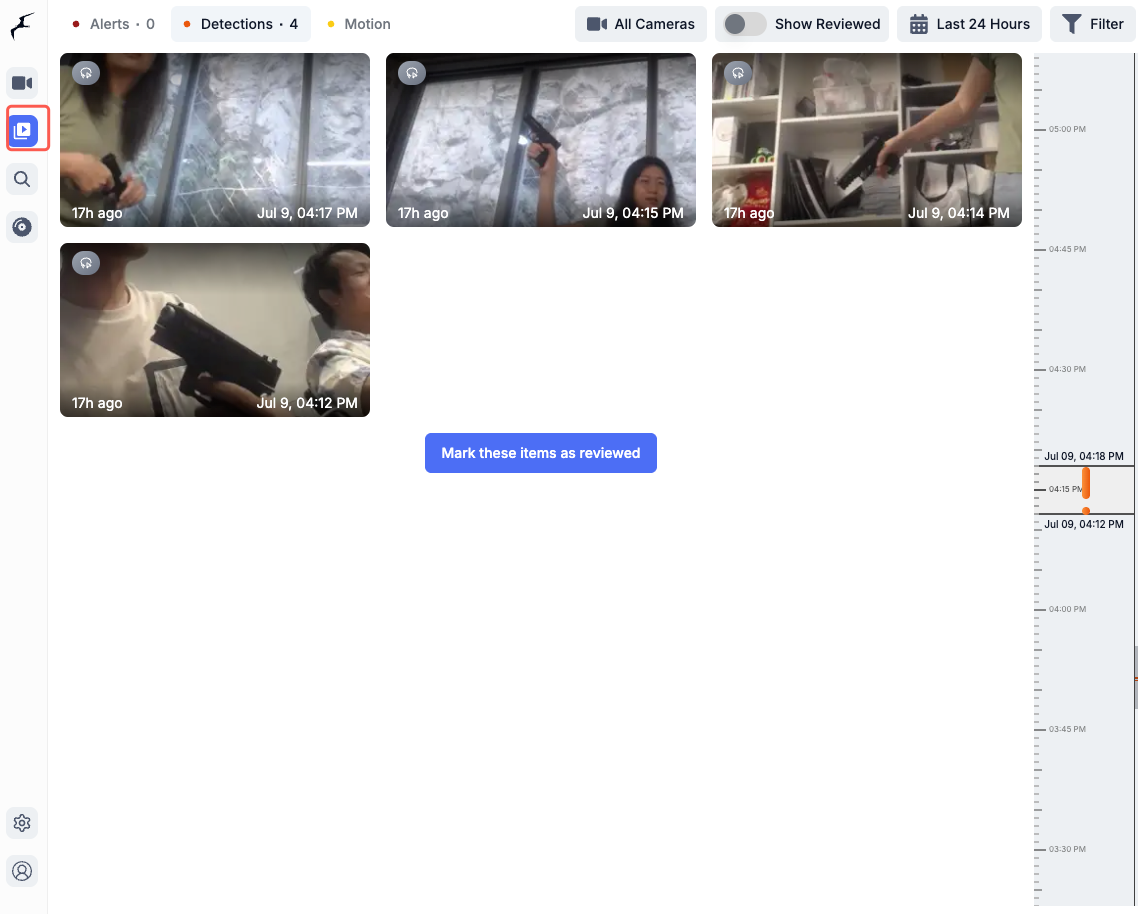
Resultado
Quando detectar alguém segurando uma arma, o modelo irá identificá-la e selecioná-la. Altere para o modo de depuração, selecione a caixa de exibição e os resultados serão exibidos automaticamente; alterne as abas para visualizar resultados de detecções anteriores.
Outras configurações
| Configuração de outras fontes de vídeo | Configuração da taxa de quadros |
|---|---|
| O Frigate oferece suporte a RTSP, transmissão de vídeo e câmeras USB. Depois que o arquivo de configuração for ajustado, ele entrará em vigor após a reinicialização. | O arquivo de configuração pode definir a taxa de quadros de detecção de cada câmera, o que entrará em vigor após a reinicialização. |
| Você pode acessar as opções de configuração em Settings, como alterar o caminho RTSP para conectar a uma câmera RTSP. Depois de fazer alterações, clique em Save & Restart no canto superior direito para que as alterações entrem em vigor. | 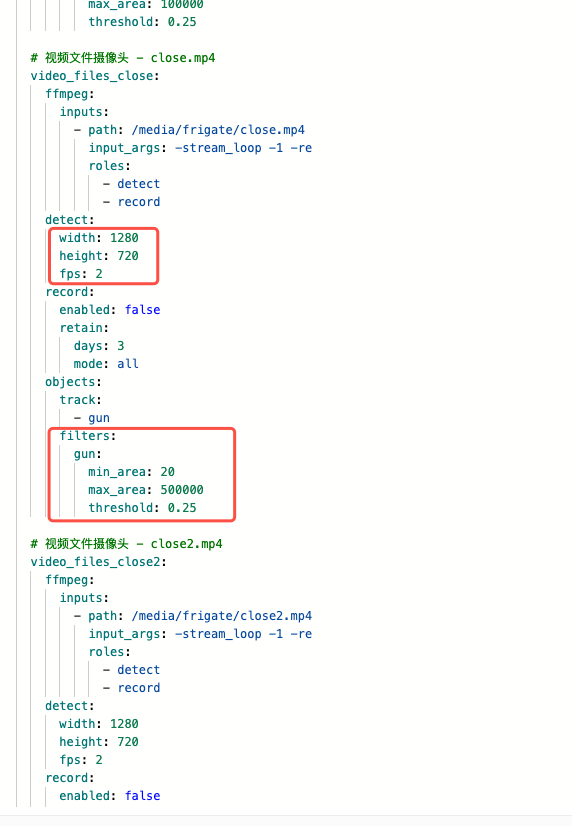 |
Suporte Técnico & Discussão sobre Produtos
Agradecemos por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja o mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.