Introdução aos HighTorque Motors
Este manual se aplica ao High Torque Commissioning Assistant v0.11.1 e versões superiores. O High Torque Commissioning Assistant é aplicável para firmware de motor v3.1.0 e versões superiores.
1. Diretrizes de Uso do Motor
🔌 Fiação de Hardware do Motor
Sempre certifique-se de que a alimentação esteja desconectada antes de fazer qualquer conexão.
| Especificação | Valor |
|---|---|
| Tensão Nominal | 24VDC |
| Comunicação | FDCAN (via módulo USB-C) |
| Modelos de Motor | 5047, 4438, etc. |
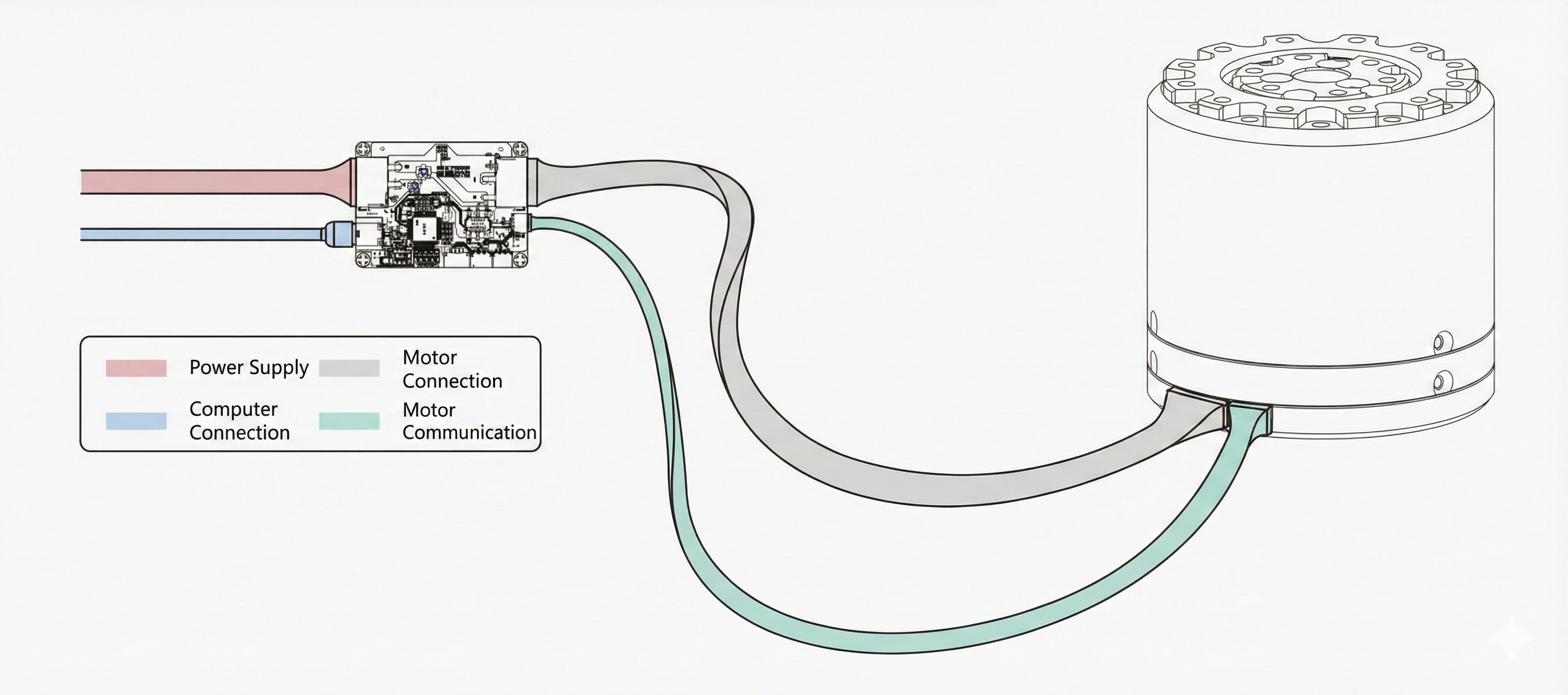
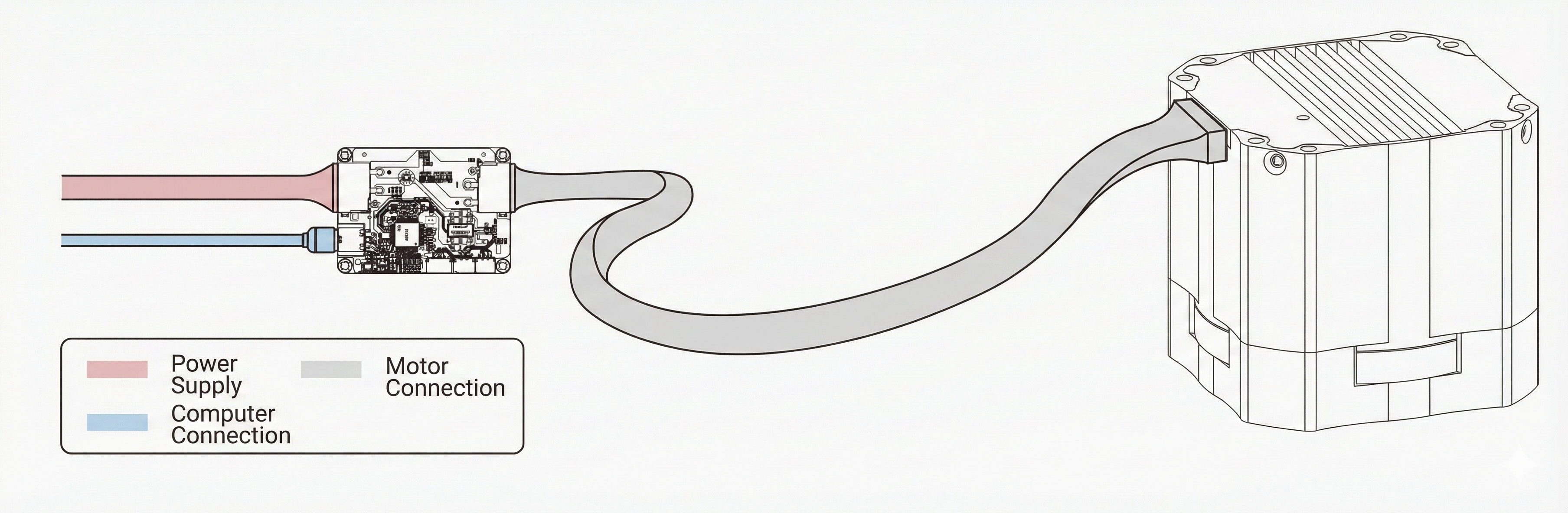
Etapas de Conexão
-
Conexão de Alimentação 🔌 Conecte a fonte de alimentação de 24V ao módulo FDCAN
-
Interface do Motor 🔌 Conecte a interface XT30 (2+2) do motor ao módulo FDCAN usando o cabo GH1.25-3P
-
Conexão com o PC 💻 Conecte o módulo FDCAN ao computador via USB-C
2. Uso e Instruções do High Torque Motor Commissioning Assistant
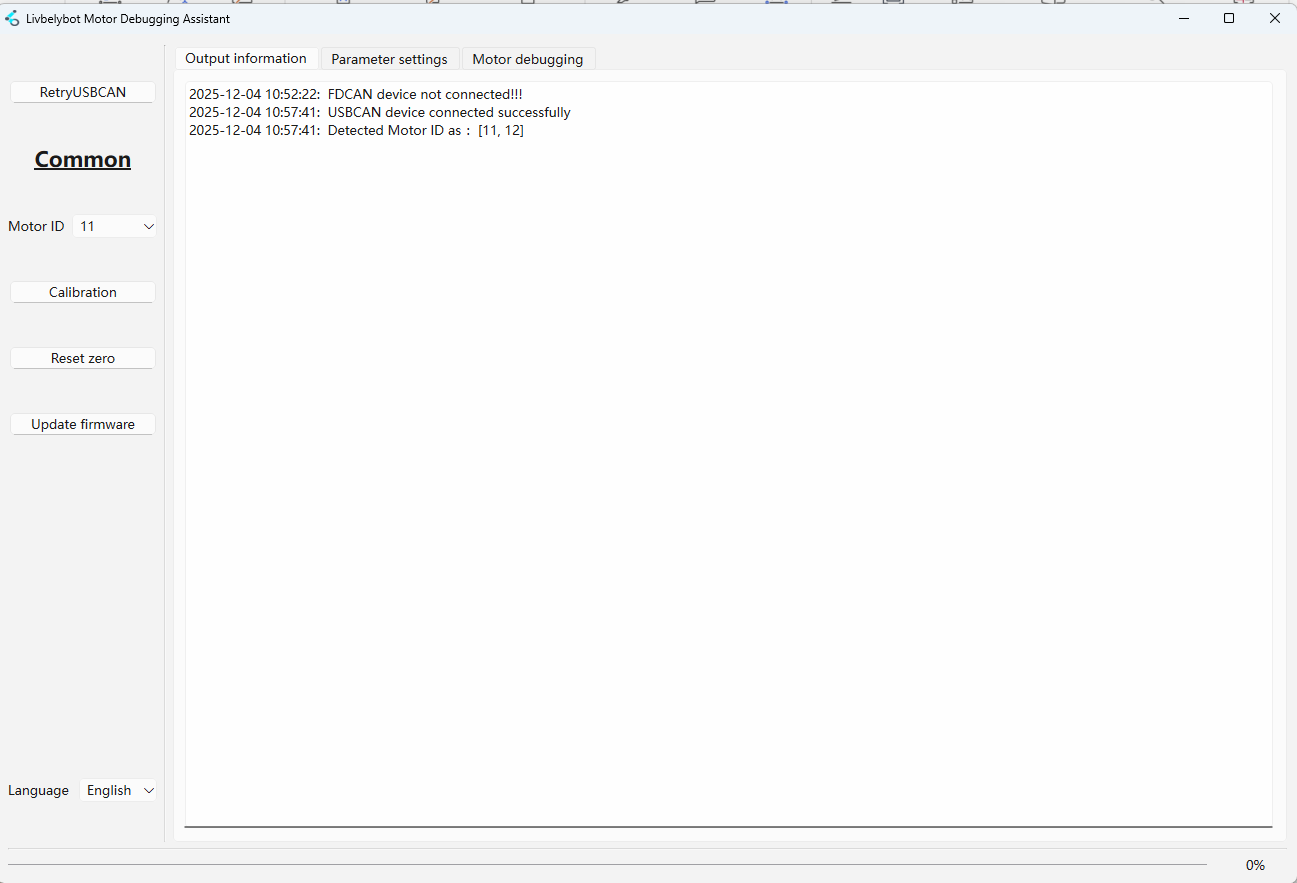
🎛️ Funções Comuns
| Função | Descrição |
|---|---|
| 🔄 Reconnect USBCAN Device | Faz a varredura e conecta o dispositivo USBCAN e detecta os motores conectados |
| 🆔 Motor ID | Seletor suspenso para o motor conectado no momento |
| ⚙️ Motor Calibration | Recalibra o motor (⚠️ O motor deve estar sem carga) |
| 🎯 Reset Current Motor Zero | Define a posição atual como referência zero |
| 💾 Update Motor Firmware | Baixa e grava o novo firmware no motor |
| 📊 Output Information | Console de registro em tempo real para eventos e erros |
A Motor Calibration deve ser realizada com NENHUMA CARGA conectada ao motor. Não seguir isso resultará em cálculo incorreto do deslocamento do encoder.
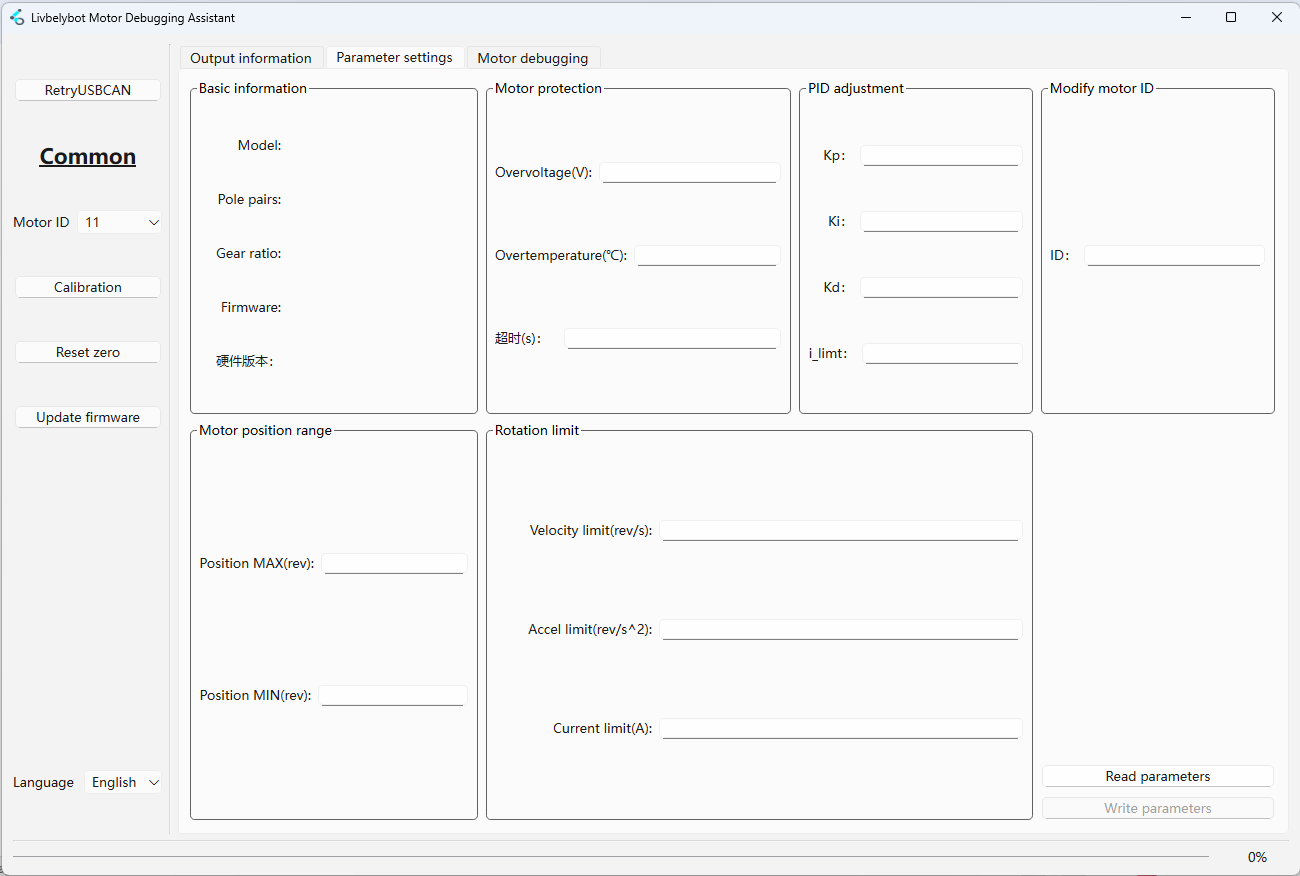
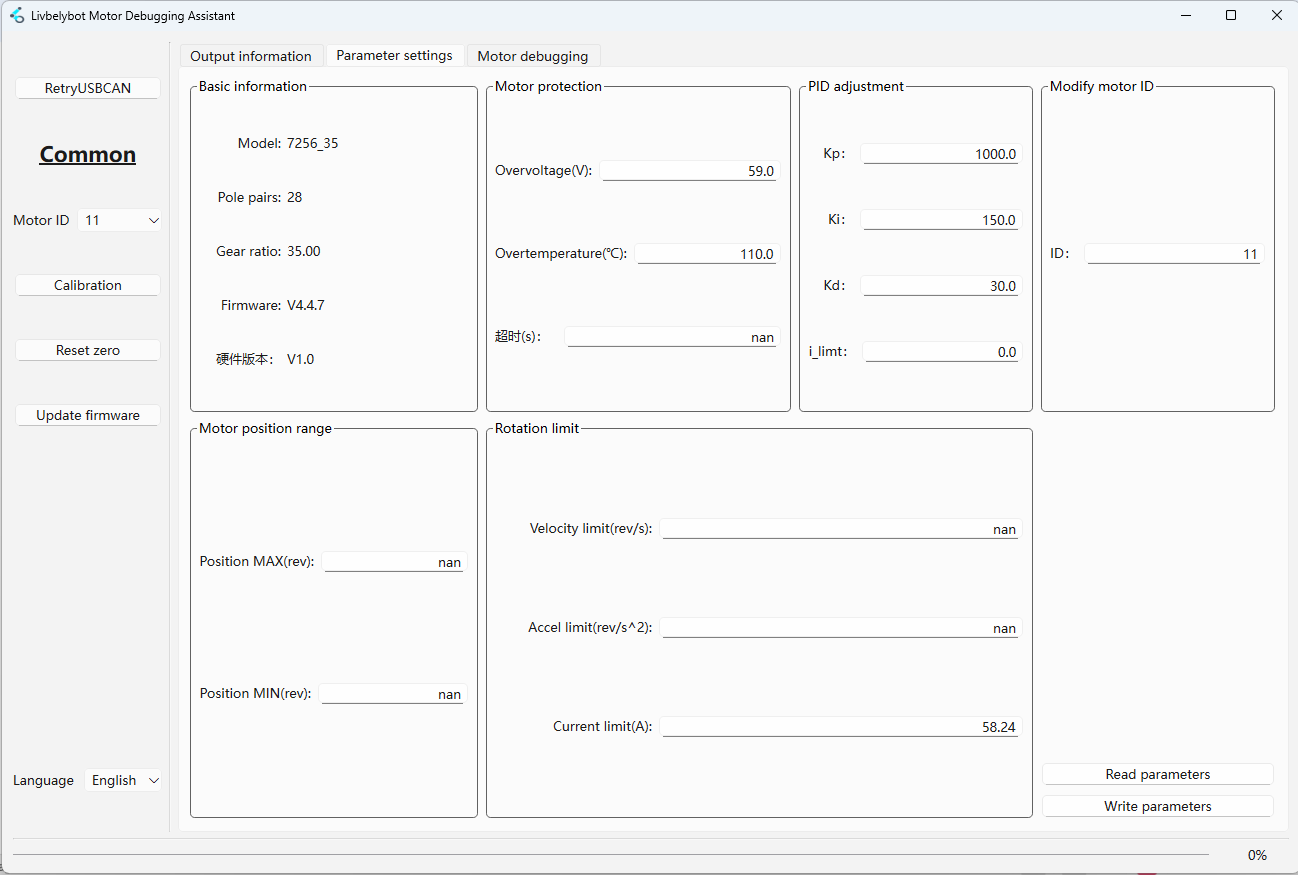
Use Read Parameters para buscar as configurações atuais e Write Parameters para salvar as alterações no motor.
| Grupo de Parâmetros | Descrição |
|---|---|
| 📋 Informações Básicas | Exibe Modelo, Pares de Polos, Taxa de Redução, Versão de Firmware |
| 🛡️ Proteção do Motor | Limites de sobretensão (V) e sobretemperatura (°C) |
| ⚖️ Ajuste de PID | Coeficientes Kp, Ki, Kd + i_limit (limite integral) |
| 🆔 Modificar ID do Motor | Altera o ID do motor (requer nova identificação) |
| 📍 Faixa de Posição do Motor | Limites MAX/MIN de posição (defina como nan para infinito) |
| 🚀 Limites de Rotação | Limites de velocidade (rev/s), aceleração (rev/s²) e corrente (A) |
Defina os valores como nan para operação ilimitada nas seções Faixa de Posição e Limites de Rotação.
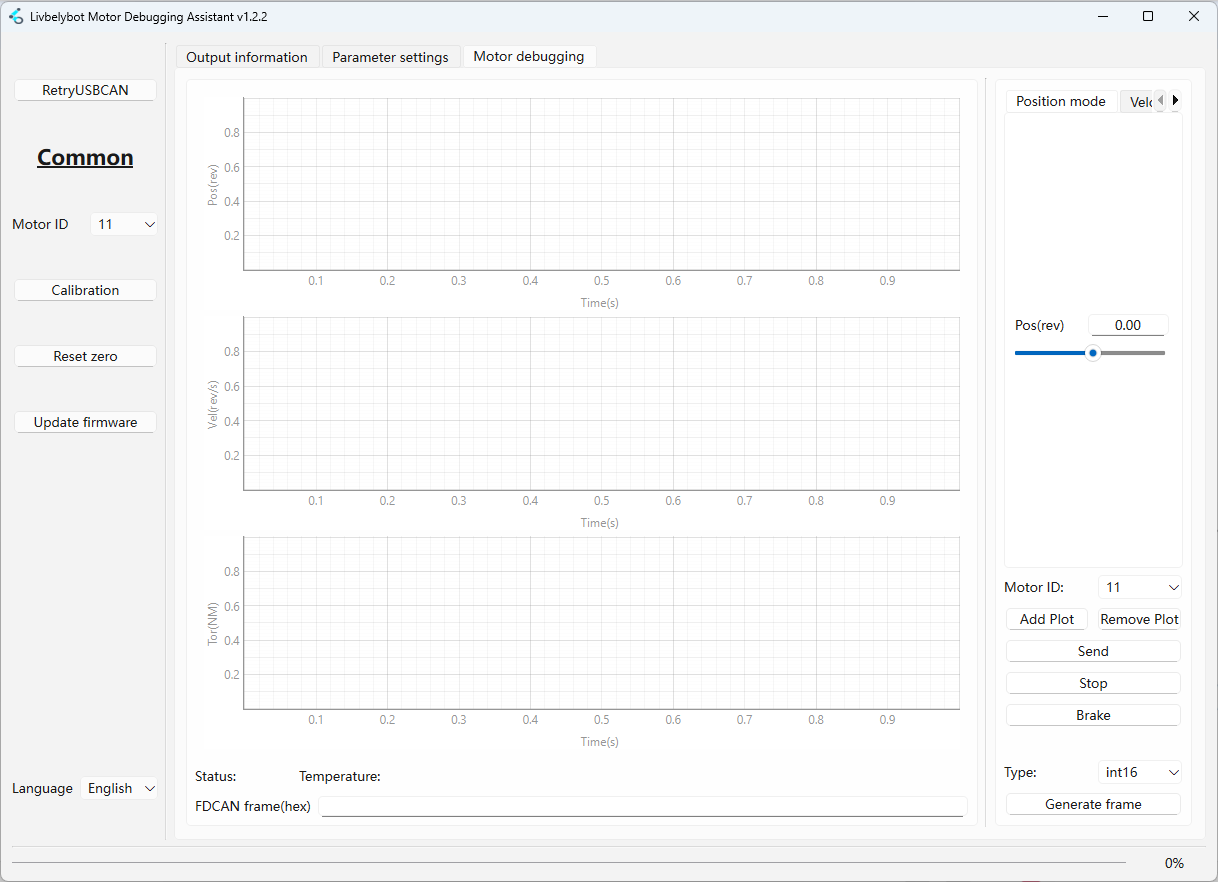
🔧 Depuração do Motor
Depure com diferentes modos de operação (visão detalhada em Motor Running Modes).
| Recurso | Descrição |
|---|---|
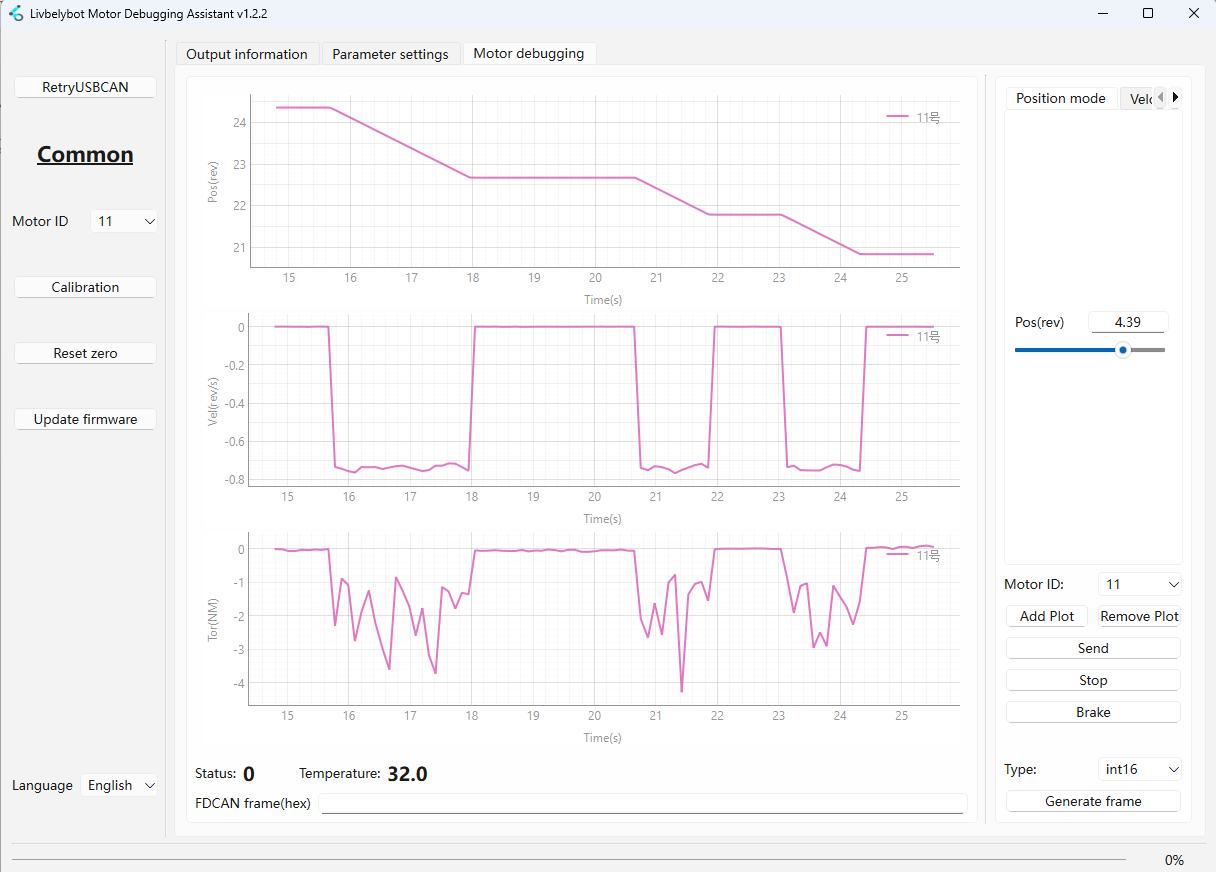
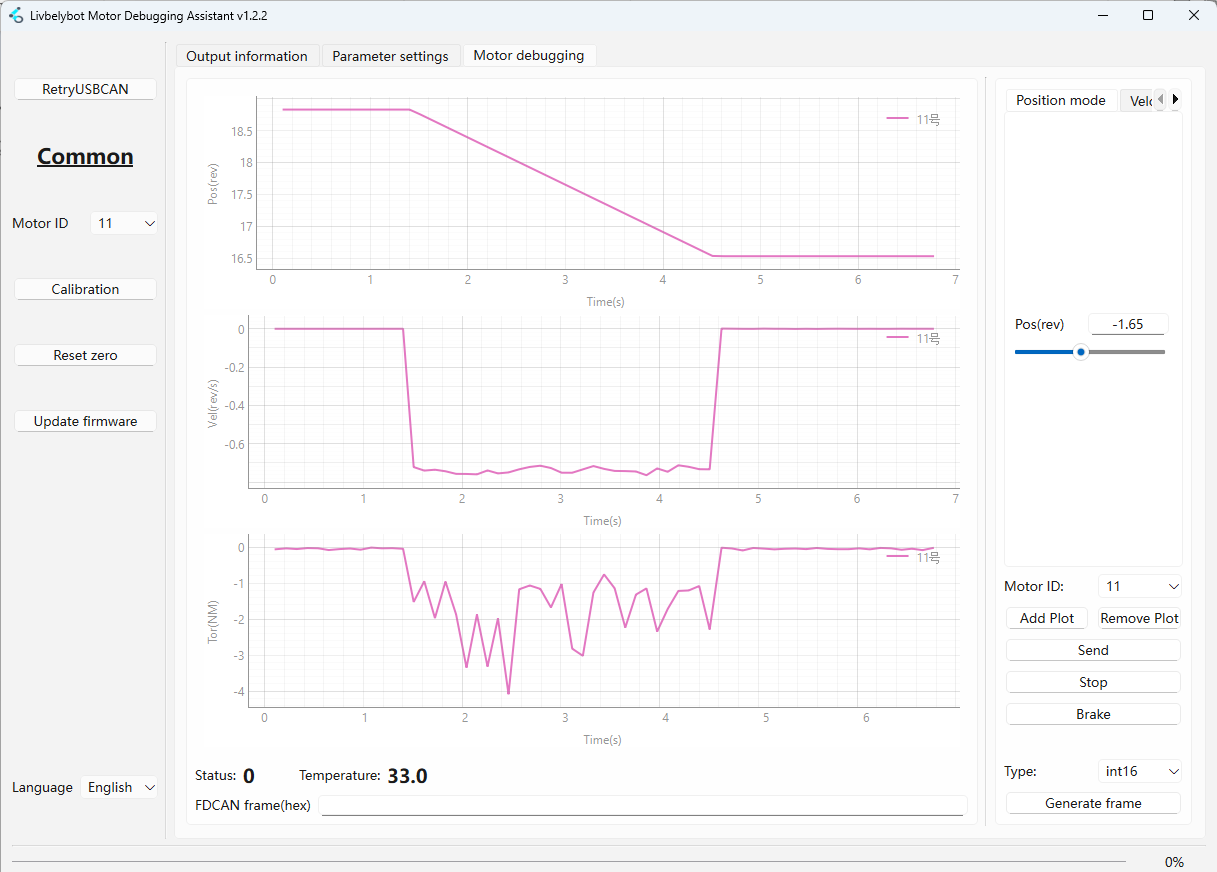
| 📈 Motor Running Mode | Clique em "Add Waveform" para visualizar Posição, Velocidade, Torque e Temperatura em tempo real |
| 📊 Status do Motor | Informações de quadros FDCAN (float, int16, int32, quadro CAN) |
| 🛠️ Generate Frame | Cria quadros CAN personalizados para desenvolvimento |
| 🛑 Stop & Brake | Controla o comportamento de parada do motor |
Tipos de Geração de Quadros
- Tipos Numéricos
- Quadro CAN
float, int16, int32
Para exemplos de implementação e tratamento de tipos de dados, consulte os exemplos de protocolo FDCAN nesta seção
CAN Frame
Para exemplos de geração e tratamento de quadros CAN, consulte os guias de implementação do protocolo
Controle de Stop & Brake
| Controle | Comportamento |
|---|---|
| 🛑 Stop | Desconecta todas as três fases - o motor desliza até parar pela inércia |
| ⚡ Brake | Curto-circuita as três fases para o terra - o motor para imediatamente |
🎮 Modos de Operação do Motor
- 1️⃣ Modo de Posição
- 2️⃣ Modo de Velocidade
- 3️⃣ Modo de Torque
- 4️⃣ Modo de Tensão
- 5️⃣ Modo de Corrente
- 6️⃣ Posição+Velocidade+Torque
- 7️⃣ Controle Trapezoidal
- 8️⃣ Controle de Movimento
Modo de Posição 🎯
Fornece controle angular preciso do eixo do motor. Insira a posição de destino em rotações e clique em enviar. O motor se moverá para a posição exata especificada usando controle PID em malha de posição.
Ideal para: Juntas robóticas, máquinas CNC, sistemas de atuadores
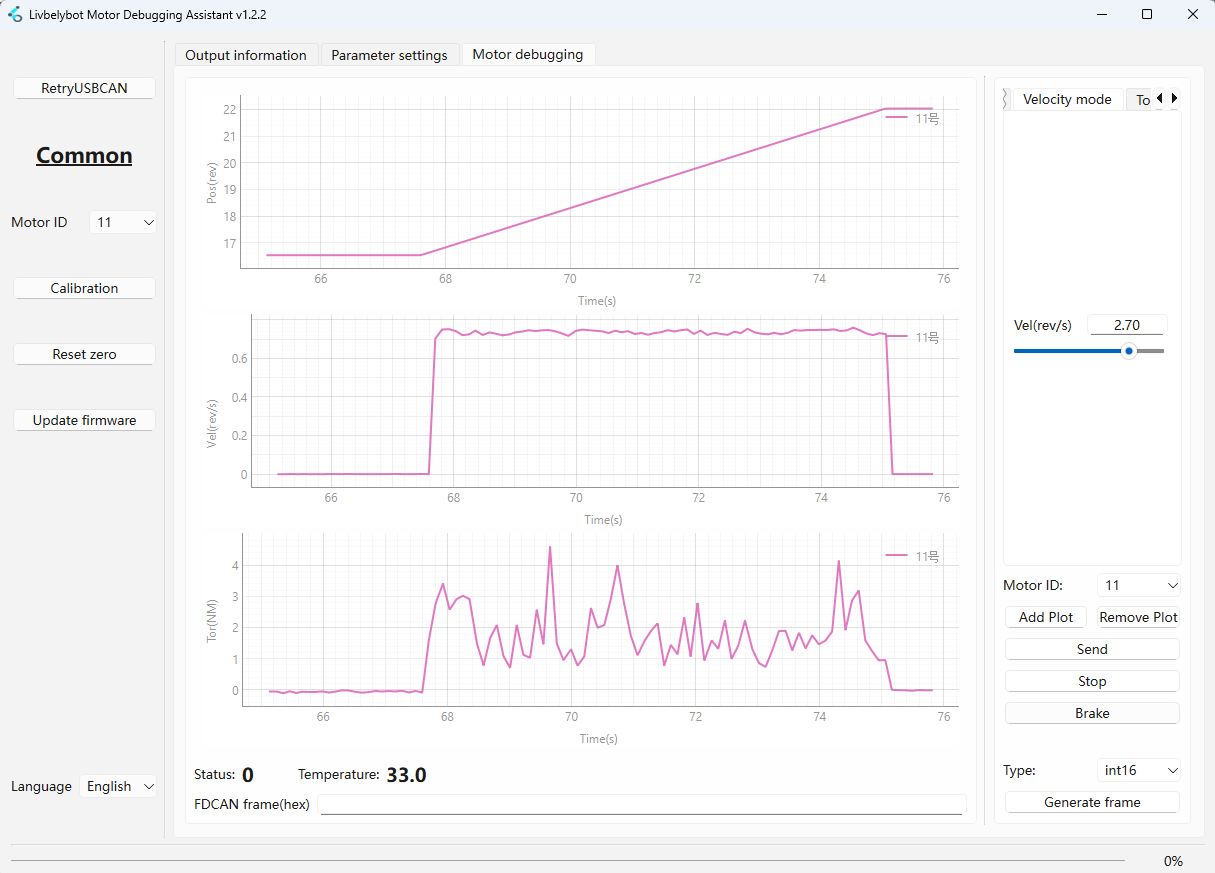
Modo de Velocidade 🔄
Mantém uma velocidade de rotação constante independentemente de variações de carga (dentro da capacidade). Insira a velocidade de destino em rev/s e clique em enviar. O motor irá acelerar até a velocidade especificada usando o limite de aceleração configurado.
Ideal para: Esteiras transportadoras, ventiladores, mesas rotativas
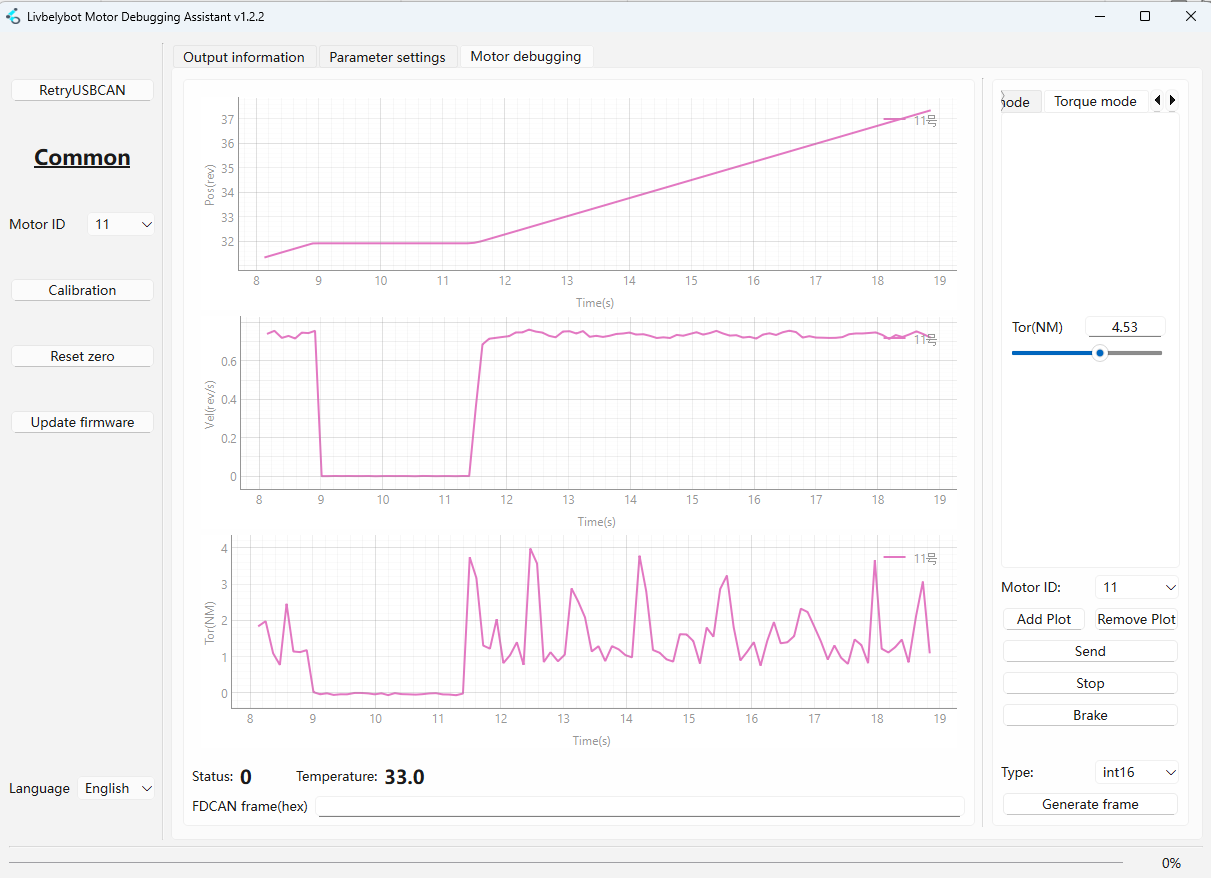
Modo de Torque 💪
Controla diretamente o torque de saída. O motor tentará manter o valor de torque especificado independentemente da velocidade. Se a resistência externa exceder o torque definido, o motor entrará em estol para proteger o sistema.
Unidades: Newton-metro (Nm)
Ideal para: Sistemas de tensionamento, operações de prensagem, manutenção de carga
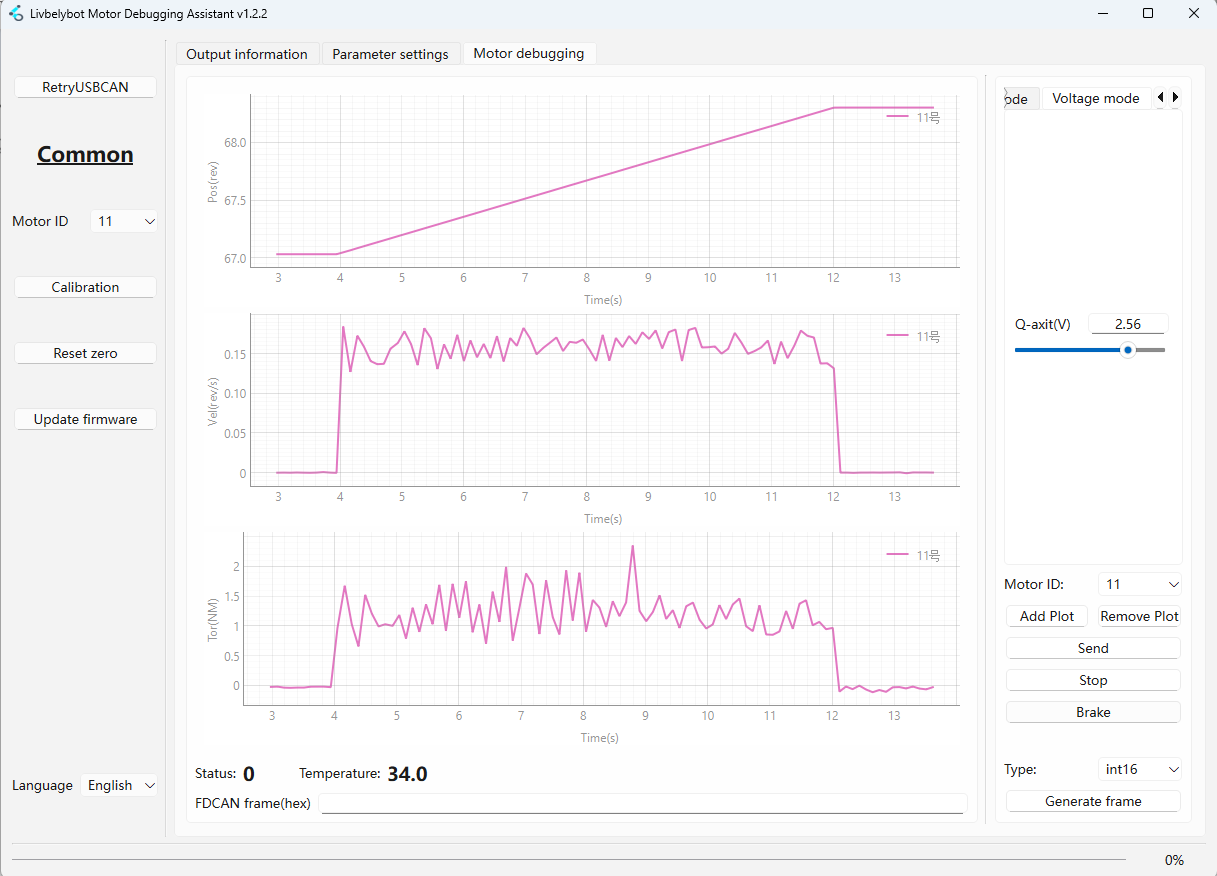
Modo de Tensão ⚡
Fornece controle direto sobre a tensão do eixo Q aplicada ao motor. Este modo avançado permite algoritmos de controle personalizados e é normalmente usado em aplicações de pesquisa ou sistemas de controle especializados.
Unidades: Volts (V)
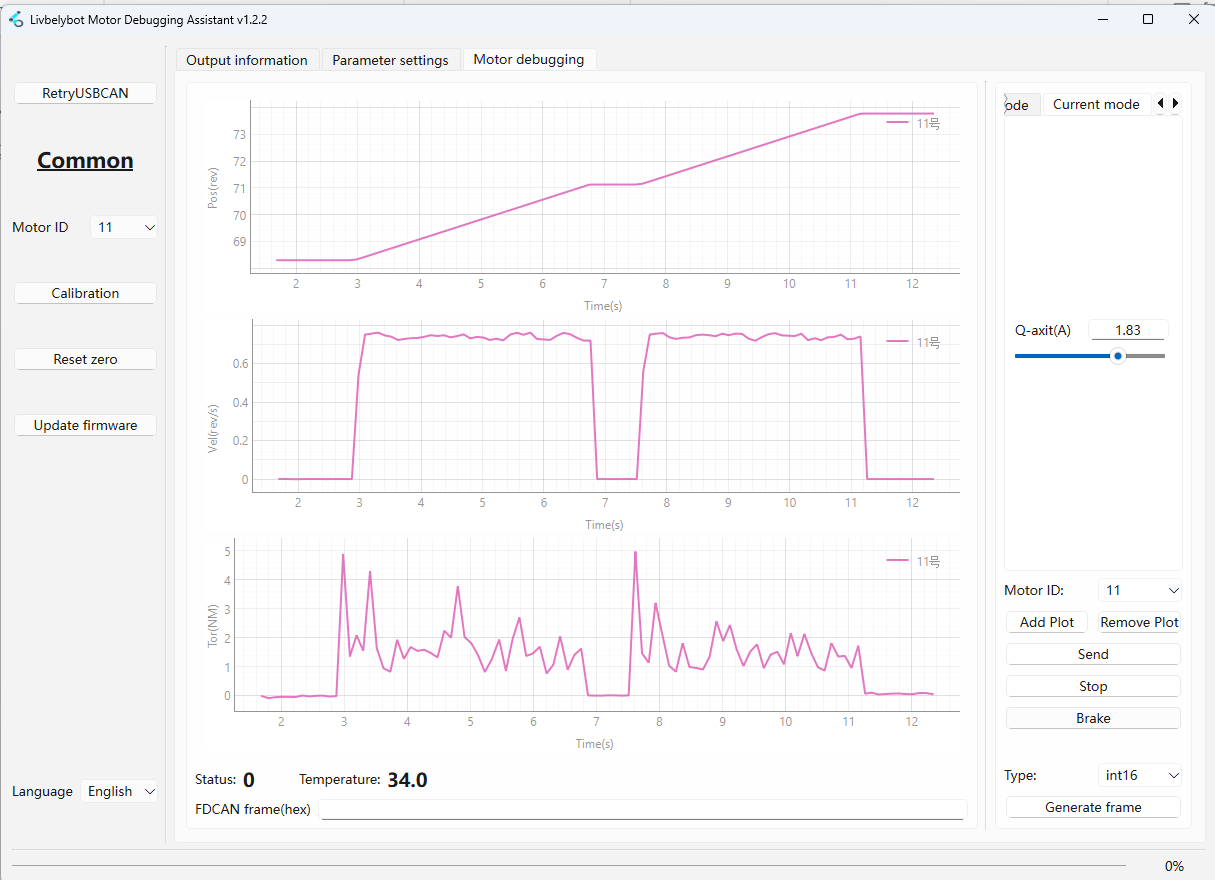
Modo de Corrente 🔋
Controla a corrente do eixo Q que flui pelos enrolamentos do motor. Este modo fornece um controle mais direto sobre a geração de torque do que o modo de torque, pois a corrente é o fator fundamental da intensidade do campo magnético.
Unidades: Ampères (A)
Ideal para: Aplicações de controle de torque de alta precisão
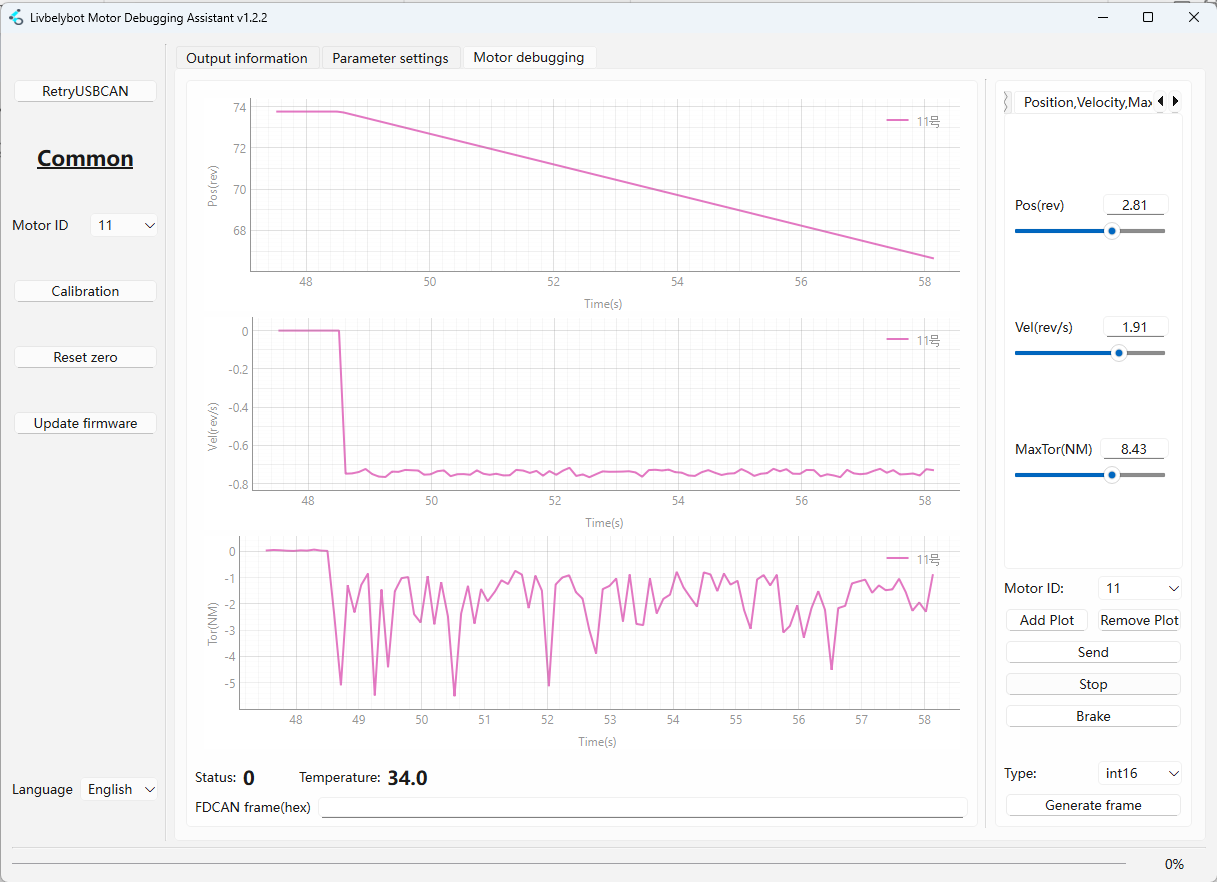
Posição, Velocidade, Torque Máximo 🎛️
Modo híbrido que combina controle de posição com limitação de velocidade e torque para um movimento seguro e controlado. O motor se moverá para a posição especificada na velocidade desejada garantindo que o torque de saída nunca exceda o limite máximo.
Ideal para: Garras robóticas, atuadores de porta, aplicações com limitação de força
Defina o torque máximo como nan se não desejar limitação de torque.
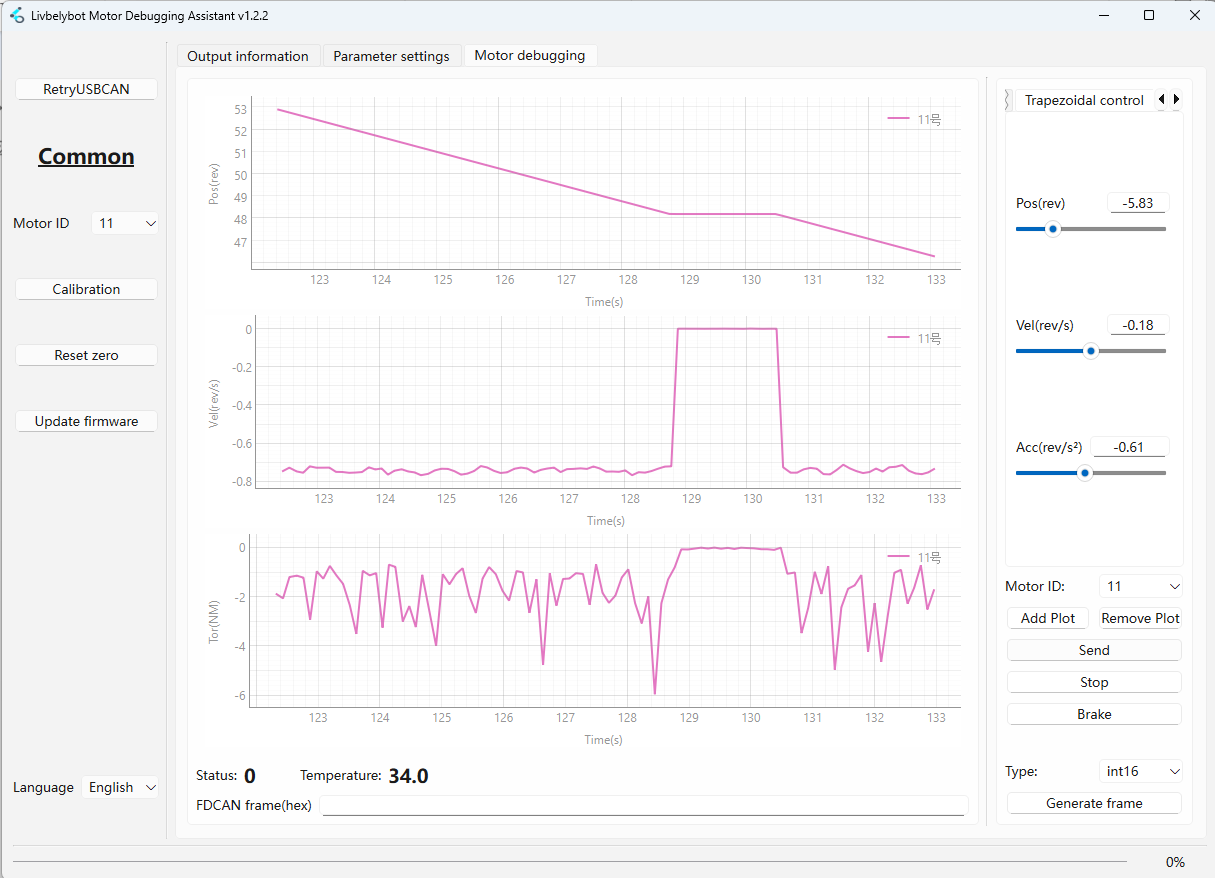
Controle Trapezoidal 📈
Gera trajetórias suaves em curva-S com fases controladas de aceleração e desaceleração. O motor irá: 1) acelerar uniformemente até a velocidade máxima, 2) manter velocidade constante e, então, 3) desacelerar uniformemente até parar precisamente na posição de destino.
Ideal para: Operações pick-and-place, posicionamento CNC, automação de precisão
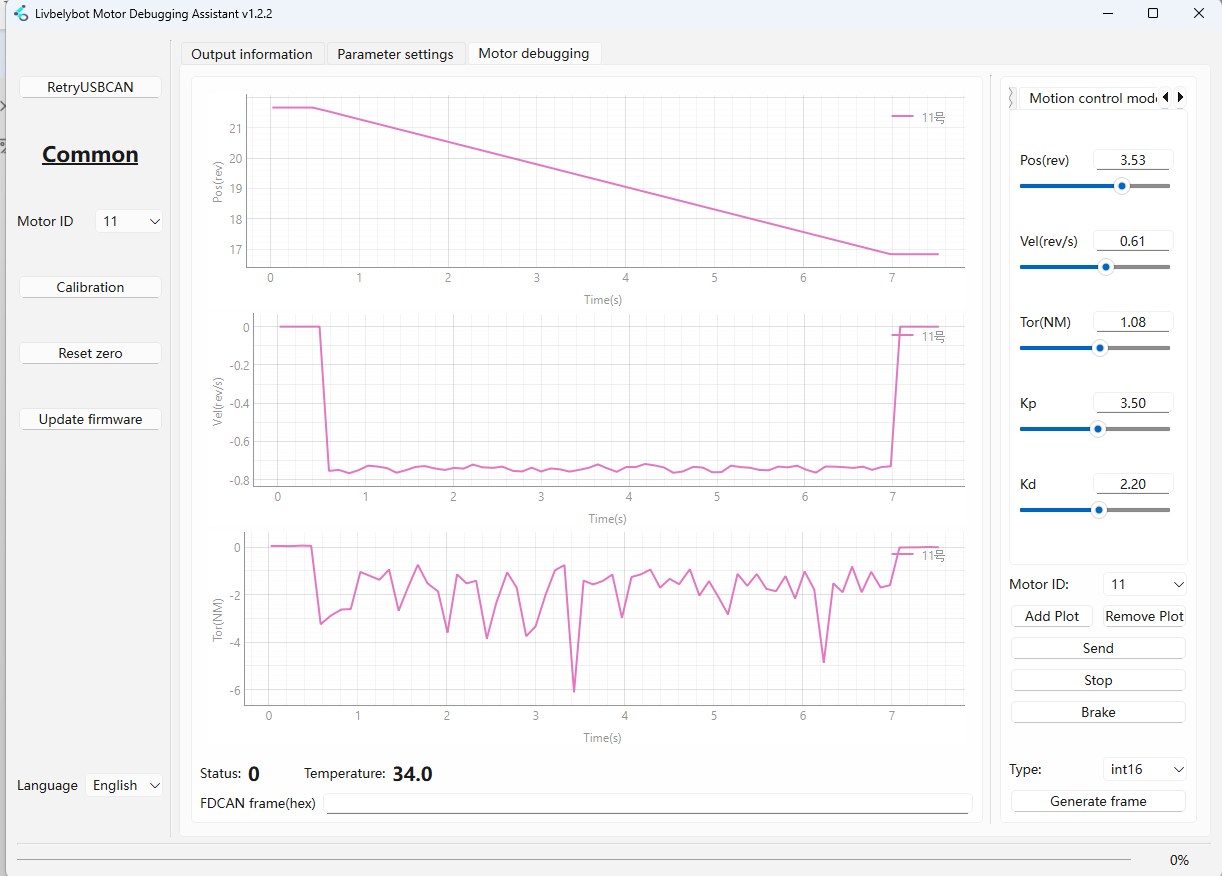
Modo de Controle de Movimento 🤖
Modo avançado de controle baseado em PID usando a fórmula:
Torque de Saída do Motor = Kp × Position_Error + Kd × Speed_Error + FeedForward_Torque
Este modo combina erro de posição (termo P) e erro de velocidade (termo D) para um controle de movimento sofisticado.
Ideal para: Aplicações de alta precisão, prensas servo, montagem com controle de força
3. 🔌 Análise do Protocolo FDCAN
Esta seção abrange as informações essenciais do protocolo FDCAN para operações básicas de controle do motor. Para mapeamento completo de registradores e detalhes avançados do protocolo, consulte a documentação de controle do motor.
Exemplo: Quadro de Dados int32 em Modo de Velocidade
Tome o int32 Data Frame Velocity Mode como exemplo:
01000a0a2000000080204e0000
1️⃣ Sub-frame 1 - Configuração do Modo do Motor
Este subquadro configura o modo de operação do motor.
| Campo | Valor | Descrição |
|---|---|---|
| 0x01 | Cabeçalho | Início do primeiro subquadro |
| Bits 7-4 | 0000 | Operação de escrita nos registradores do motor |
| Bits 3-0 | 0001 | Tipo de dado int8_t, 1 unidade de dado |
| 0x00 | Endereço de Registrador | Registrador de Configuração do Modo do Motor |
| 0x0a | Dado | Define o motor para Velocity Mode |
2️⃣ Sub-frame 2 - Parâmetros de Movimento
Este subquadro configura os parâmetros de movimento (alvos de posição e velocidade).
| Campo | Valor | Descrição |
|---|---|---|
| 0x02 | Cabeçalho | Início do segundo subquadro |
| Bits 7-4 | 0000 | Operação de escrita |
| Bits 3-0 | 0010 | Tipo de dado int32_t, 2 unidades de dados |
| 0x20 | Início do Registrador | Registrador de Alvo de Posição (0x20) |
| 0x00 0x00 0x00 0x80 | Dados de Posição | 0x80000000 = Posição ilimitada/NaN |
| 0x20 0x4e 0x00 0x00 | Dados de Velocidade | 0x00004e20 = 20000 (decimal) |
Cálculo de Velocidade:
- Valor Decimal: 20000
- Peso do LSB: 0.00001 rev/s por unidade
- Velocidade Alvo: 20000 × 0.00001 = 0.2 rev/s
📚 Apêndice
⚠️ Referência de Código de Erro do Motor
Um valor diferente de zero indica um erro. Consulte a tabela abaixo para causas e soluções específicas.
| Código | Nome do Erro | Descrição | Solução |
|---|---|---|---|
| 32 | 🔧 Falha de Calibração | O encoder não consegue detectar o ímã durante a calibração | Certifique-se de que o ímã está instalado corretamente; recalibre sem carga |
| 33 | ⚡ Falha no Driver do Motor | Subtensão ou corrente insuficiente | Verifique a tensão e a capacidade de corrente da fonte de alimentação |
| 34 | 🔺 Sobretensão | A tensão do barramento excedeu o limite | Verifique a especificação de tensão da fonte de alimentação |
| 35 | 📡 Falha do Encoder | Erro de leitura do encoder | Verifique as conexões e a fiação do encoder |
| 36 | 🚫 Motor Não Calibrado | O motor não foi calibrado | Execute o procedimento de calibração sem carga |
| 37 | 📊 Limite de Ciclo PWM Excedido | Erro interno de firmware | Contate o suporte técnico |
| 38 | 🌡️ Superaquecimento | A temperatura excedeu o limite máximo | Deixe o motor esfriar; verifique a refrigeração |
| 39 | 🎯 Fora dos Limites | Controle de posição fora dos limites definidos | Ajuste os parâmetros de faixa de posição |
| 40 | 🔋 Baixa Tensão | Tensão de alimentação muito baixa | Verifique a fonte de alimentação e as conexões |
| 41 | ⚙️ Configuração Alterada | Configuração crítica alterada durante a operação | Pare o motor antes de alterar parâmetros |
| 42 | 🔄 Ângulo Inválido | Nenhum encoder de comutação válido | Verifique o funcionamento e as conexões do encoder |
| 43 | 📍 Posição Inválida | Nenhum encoder de saída válido | Verifique as conexões do encoder de saída |
Suporte Técnico & Discussão de Produto
Obrigado por escolher nossos produtos! Estamos aqui para fornecer diferentes tipos de suporte para garantir que sua experiência com nossos produtos seja a mais tranquila possível. Oferecemos vários canais de comunicação para atender a diferentes preferências e necessidades.